5.
Endoscopia Innovativa
5.1 Introduzione
In questo capitolo vengono riportate alcune delle innumerevoli
soluzioni proposte dalla letteratura scientifica e dai brevetti registrati
in tutto il mondo. Data la vastità del tema, questa trattazione risulterà
non esaustiva per i lettori più esperti. Dal punto di vista metodologico
si è cercato di orientare la ricerca bibliografica a 360 gradi senza
escludere nessuna possibilità. L’analisi dei risultati acquisiti ha reso
evidente che gli strumenti endoscopici innovativi si possono
suddividere in tre classi arbitrarie: strumenti innovativi ispirati ed
evoluzione di quelli tradizionali, pillole endoscopiche e progetti
futuribili. Per ogni classe, saranno riportati alcuni esempi nei prossimi
paragrafi. Per quanto riguarda l’ultima classe, non è possibile
realizzare una sintesi completa dato che tra i brevetti sono stati trovati
strumenti diversissimi tra loro.
Capitolo 5 • Endoscopia innovativa
5.2 Endoscopi evoluzione di quelli tradizionali
5.2.1
Videoendoscopi di ultima generazione
Nonostante nel capitolo precedente si sia già evidenziato che i
videoendoscopi sono strumenti presenti nella maggior parte dei
moderni reparti di endoscopia digestiva, la loro continua e rapidissima
evoluzione porta ad avere nuovi modelli con elevati contenuti
innovativi.
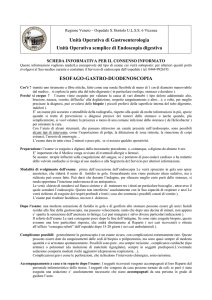
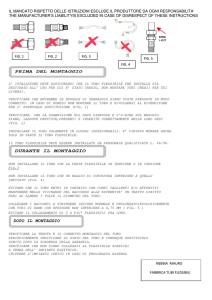
Innanzi tutto analizziamo nel dettaglio la sezione trasversale della
parte flessibile dello strumento. Essa è costituita da un tubo a spirale
ricoperto da una guaina in plastica (vedi Fig. 5.1), nel quale sono
strettamente contenuti: il fascio di fibre per la visione (L) (nei
videoendoscopi questo è sostituito da un semplice cavo che collega la
CCD all’unità di elaborazione esterna dell’immagine), il fascio di fibre
per l’illuminazione (L), i tiranti in acciaio per l’orientamento(B) , il tubo
per l’insufflazione dell’aria (K), il tubo per l’immissione dell’acqua di
lavaggio (K), il canale bioptico e/o di aspirazione (I). Queste parti sono
realizzate per essere una struttura flessibile, resistente alla
deformazione. La copertura è realizzata da un tubo in acciaio a spirale
coperto da una finissima rete in acciaio e protetta da una guaina
esterna in plastica.
Fig. 5.1
5.2
Tesi di Dottorato di Luigi Gerovasi
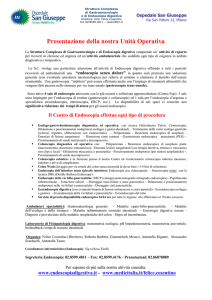
Per quanto riguarda la parte terminale del elemento flessibile
troviamo i seguenti elementi: le lenti dell’ottica visuale, le lenti dei
fasci
porta
illuminazione,
il
foro
d’uscita
del
canale
bioptico/aspirazione, l’ugello per il lavaggio dell’ottica visuale ed
insufflazione, il tutto assemblato all’interno dell’estremità distale
protetta da una flessibilissima calza in acciaio.
Fig. 5.2
Come mostrato nella figura precedente sono due le possibili
disposizioni della CCD. Quest’ultima ha la funzione di trasformare
l’immagine trasmessa dall’ottica all’oculare in segnali elettrici, che
possono essere mostrati su un monitor televisivo. La sua qualità viene
definita da 3 parametri: sensibilità luminosa, che nei modelli di
ultimissima generazione può arrivare a 3 lux; definizione, espressa dal
numero di pixel che compongono l’immagine (da 250.000 ad oltre
500.000 per le telecamere ad 1 CCD, ad oltre 1.300.000 per quelle a 3
CCD); risoluzione, numero di linee orizzontali per pollice. La
risoluzione di un videoendoscopio tradizionale è di almeno 400 linee
orizzontali per pollice. I modelli più recenti possiedono 3 CCD ed
hanno quindi una maggiore risoluzione dell’immagine (orizzontale
5.3
Capitolo 5 • Endoscopia innovativa
maggiore di 750 linee) dal momento che ognuno dei 3 CCD raccoglie
solo una delle tre componenti luminose. Alcuni strumenti recentissimi
hanno anche un dispositivo zoom parfocale (Strorz Tricam SL
Endovision) che consente un primo piano del campo operatorio senza
fare avanzare l’ottica ed elimina la fastidiosa necessità di continui
aggiustamenti della messa a fuoco, legata a variazioni della distanza
focale, consentendo di eseguire qualsiasi zoom conservando la stessa
nitidezza dell’immagine. Inoltre molte telecamere sono provviste di
sofisticati software di bilanciamento del bianco e della regolazione
dell’esposizione che consentono una perfetta visione anche in
condizioni di illuminazione limite.
Anche la fonte luminosa è stata notevolmente migliorata. Essa è
collegata direttamente alla sonda dell’endoscopio per mezzo di un cavo
flessibile. Per avere un’ottima illuminazione la fonte deve avere
particolari caratteristiche intrinseche legate non solo al tipo di
lampadina impiegata, ma soprattutto al modo in cui il flusso luminoso
prodotto viene raccolto e convogliato nel collettore che raccoglie i capi
del fascio a fibre ottiche. La lampada deve emettere una luce
particolarmente bianca (potenza massima di illuminazione superiore ai
500.000 lumen/m2 ) con temperatura di colore che va dai 3.500°K ai
6.000°K. Ne esistono di due tipi: allo xenon con potenze intorno ai
300 Watt e alogene con potenze di 100-150 Watt. Per ragioni di
sicurezza gli illuminatori di ultima generazione prevedono l’impiego di
due lampadine, di cui una da usare in caso di malfunzionamento della
principale.
I video endoscopi sono dotati di un sistema digitale di elaborazione
delle immagini in grado di migliorare nettamente il contrasto e la
nitidezza delle immagini. Ciò permette una visualizzazione ottimale di
strutture particolareggiate: il chirurgo riconosce più facilmente gli
organi, particolarmente i loro limiti e contorni e le strutture vascolari.
Le aree di interesse appaiono più nitide poiché è più facile distinguerle
dagli organi circostanti. Ciò aiuta anche nel migliorare la percezione di
profondità. Il contrasto può essere aumentato o diminuito
gradualmente. Il miglioramento del contrasto è ottenuto grazie ad una
modifica mirata di tutti i valori della scala cromatica di un’immagine. A
tale scopo, tutta l’immagine viene digitalizzata e quindi rielaborata con
5.4
Tesi di Dottorato di Luigi Gerovasi
un procedimento digitale. L’aumentata riconoscibilità dei particolari
non solo migliora le possibilità diagnostiche, ma facilita anche il
controllo durante fasi complicate della chirurgia endoscopica, ad
esempio durante una sutura. Inoltre la migliore qualità dell’immagine
a video diminuisce l’affaticamento del chirurgo. Negli interventi in cui
diversi procedimenti vengono eseguiti in parallelo con l’impiego di due
sistemi
video
(colecistectomia
e
coledocoscopia,
immagine
laparoscopica ed endoscopica, immagine laparoscopica ed esterna)
questo sistema permette la visualizzazione simultanea di due immagini
video diverse e complementari su un monitor unico. In questo modo è
possibile coordinare meglio le informazioni, ottenere un controllo
intraoperatorio notevolmente migliorato concentrando l’attenzione su
un solo monitor.
5.2.2
Apparati innovativi
tradizionali
ispirati
agli
strumenti
In questo gruppo è possibile identificare una caratteristica
unificante: riprogettazione dell’estremità della parte flessibile
dell’endoscopio per ottenere uno strumento capace di superare con
maggiore facilità le stenosi e le curve.
La maggior parte di queste proposte è tesa a rendere la parte
terminale dell’endoscopio attiva. Intendo per attiva, attuata
localmente, in grado quindi in qualche modo di consentire al chirurgo
di superare un ostacolo esercitando forza direttamente dall’interno. La
difficoltà maggiore che incontrano i progettisti di questi dispositivi è la
realizzazione di sistemi in grado di aderire in modo efficace ma
reversibile al tubo digerente.
Di seguito vengono riportati due esempi di questo tipo di
realizzazioni.
5.5
Capitolo 5 • Endoscopia innovativa
5.2.3
MUSYC: MUltifunctional mini-robot SYstem for
endosCopy
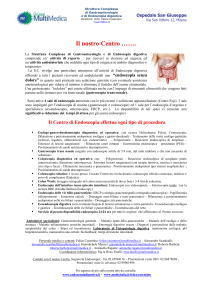
Si tratta di un prototipo di endoscopio realizzato dal MiTech Lab
della Scuola Superiore S. Anna di Pisa. L’obiettivo è quello realizzare
un dispositivo capace di avanzare con minori problemi rispetto agli
endoscopi tradizionali. Per ottenere questo scopo i ricercatori del
Sant’Anna, hanno progettato una estremità in grado di elongarsi
tramite una propulsione pneumatica. I due terminali di questa
appendice sono dotati di sistemi per il
bloccaggio al tubo digerente. Sono stati
implementati per questo fine varie
soluzioni: sistemi di aspirazione locale
in modo da far aderire la parte interna
dell’intestino all’endoscopio; sistemi
combinati di aspirazione e afferraggio;
estremità gonfiabili in modo da aderire
per interferenza con la sezione di
passaggio. Nessuna di queste soluzioni
ha dato per ora risultati soddisfacenti
per
quanto
riguarda
la
stabilità
dell’adesione.
Fig. 5.3
Fig. 5.4
In figura 5.3 è mostrato il dettaglio del sistema di afferraggio con
aspirazione e bloccaggio del lembo aspirato. In figura 5.4 è illustrato il
5.6
Tesi di Dottorato di Luigi Gerovasi
complesso del dispositivo con le estremità nella versione di pura
aspirazione. Il prototipo qui riportato ha una lunghezza minima di
85 mm ed una lunghezza massima di 145 mm, quindi una corsa utile
per ciascun passo di 60 mm. La massa di questa appendice è di 30
grammi.
5.2.4
EndoCrawler 3.1
La Scuola di Meccanica della Nanyang Technological University di
Singapore, da molti anni, porta avanti una serie di progetti per lo
studio dell’endoscopia innovativa. Tra questi, il robot EndoCrawler 3.1
è quello indirizzato alla endoscopia digestiva. L’obiettivo primario è
stato quello di realizzare un’unità endoscopica che avesse minori
difficoltà nell’attraversare il tubo digerente rispetto agli strumenti
tradizionali.
Fig. 5.5
5.7
Capitolo 5 • Endoscopia innovativa
Per raggiungere lo scopo i progettisti della Nanyang University
hanno cercato una soluzione intermedia tra quella tradizionale, in cui
l’avanzamento è dato semplicemente dalla forza applicata dal chirurgo,
e quella esposta nel paragrafo precedente, dove tutta la spinta
propulsiva è autogenerata dall’estremità attiva dell’endoscopio. Da
questo deriva che l’EndoCrawler, mostrato in figura 5.5, è del tutto
simile ad un apparato tradizionale all’infuori della vistosa appendice
terminale.
Quest’ultima è proprio una parte su
cui
focalizzare
l’attenzione.
Come
mostrato in figura 5.6, è stato
progettato un sistema di aiuto alla
locomozione attuato con micro dita in
gomma. Queste piccole protuberanze
vengono
gonfiate
e
sgonfiate
ritmicamente a file alterne in modo da
realizzare un’onda propulsiva.
Il prototipo realizzato ha dato buoni
risultati nelle prove di laboratorio
effettuate in vivo su maiali. Si è rilevato
una ottima capacità di superare le curve
intestinali con l’aiuto di una modesta
spinta
propulsiva
proveniente
dell’esterno.
Sono allo studio nuovi prototipi per
arrivare ad un dispositivo con le
seguenti
caratteristiche:
diametro
Fig. 5.6
esterno
dell’appendice
propulsiva
inferiore o uguale ai 20 mm (oggi
33 mm); progettazione di una estremità dell’appendice attuata in
grado di orientarsi autonomamente per consentire al chirurgo il
raggiungimento di qualsiasi area di interesse; realizzazione di un
apparato in grado di avanzare autonomamente senza aiuti
dall’esterno.
5.8
Tesi di Dottorato di Luigi Gerovasi
Per quanto riguarda quest’ultimo aspetto, non è pensabile un
sistema autonomo, dato che la propulsione ha una alimentazione
pneumatica.
5.3 Pillole endoscopiche
Questa classe di dispositivi sembra essere la più promettente per il
futuro ravvicinato tanto che esistono due prodotti commerciali che si
stanno diffondendo nella pratica diagnostica.
Le caratteristiche peculiari delle pillole endoscopiche sono le
seguenti: si tratta di piccoli dispositivi a forma di pillola, da ingerire
per via orale; una volta raggiunto il tubo digerente sono in grado di
trasmettere all’esterno immagini.
Questi dispositivi sono rivoluzionari sia nella metodica che
nell’impatto sul paziente. Mentre l’endoscopia è da considerarsi alla
stregua di un intervento chirurgico vero e proprio, la metodica
diagnostica connessa all’uso di una pillola endoscopica non comporta
nessuna delle problematiche e delle cautele tipiche della chirurgia.
5.3.1
Given Imaging MA2
La Given Imaging è una azienda israeliana che da molti anni si
occupa di tecniche diagnostiche non invasive. Nell’ottobre 2001 ha
iniziato la commercializzazione della pillola endoscopica MA2. Si tratta
di un dispositivo capace di inviare all’esterno del corpo del paziente
due immagini al secondo. L’esame può essere condotto mentre il
paziente compie la normale attività giornaliera. L’avanzamento nel
tubo digerente è garantito dalla peristalsi naturale. Questo consente di
scorrere l’intero tratto intestinale senza però potersi fermare né per
prelevare campioni(la pillola non ha al suo interno alcun sistema
preposto a questa funzione e neppure lo spazio necessario per
contenerlo) né per approfondire particolari poco visibili. All’interno
della capsula sono contenuti l’apparato ottico, l’unità di elaborazione e
5.9
Capitolo 5 • Endoscopia innovativa
trasmissione dei dati e le batterie. Per quanto riguarda l’unità ottica,
essa è così composta: la calotta ottica (1) contiene al suo interno la
lente di messa a fuoco (2) che è contornata da quattro led ultra
bianchi (3) che servono ad illuminare
l’area da esaminare. Sotto la lente è
posto un sensore CMOS (4) da 90.000
pixel. Nella zona centrale del dispositivo
sono
collocate
le
batterie.
Infine
nell’estremità opposta a quella ottica
sono contenute l’antenna (7) e l’unità di
elaborazione
dell’immagini
e
di
trasmissione (6). Le batterie utilizzate
consentono alla pillola endoscopica una
autonomia compresa tra sei ed otto ore.
L’esame diagnostico viene condotto
con la seguente metodica: il paziente
dopo aver inghiottito la pillola viene
dotato di un’unità esterna, che viene
fissata tramite una cintura intorno alla
Fig. 5.7
vita, in grado di ricevere le immagini
inviate dalla capsula e di registrarle su un hard disk contenuto al suo
interno.
Fig. 5.8
5.10
Tesi di Dottorato di Luigi Gerovasi
Dopo alcune ore di normale attività, il paziente ritorna dal medico
che semplicemente collega il dispositivo di registrazione ad un
computer per poter visualizzare i dati. A questo punto resta solo lo
studio dei dati da parte del medico per arrivare alla diagnosi. Alcune
immagini sono mostrate in figura 5.8. La capsula dopo l’uso viene
espulsa con le feci e non viene recuperata.
Le immagini inviate sono utilizzabili solo per quanto riguarda
l’intestino tenue, poiché l’ottica a fuoco fisso restituisce immagini
nitide solo per una piccola zona di messa a fuoco che viene tarata
proprio sulle caratteristiche geometriche del tenue.
Il costo di una singola capsula si aggira intorno ai 400 euro.
5.3.2
Norika 3
La capsula endoscopica Norika 3 è probabilmente il dispositivo per
endoscopia intestinale più sofisticato tra quelli oggi in commercio. E’
prodotto da una azienda giapponese, RF System Lab., che dal 1993 si
occupa di microtelecamere, sensori e trasmissione di dati e potenza
senza fili.
Fig. 5.9
Come mostrato nella figura 5.9, anche questo dispositivo ha la tipica
forma a pillola. L’ingombro è significativamente inferiore rispetto alla
5.11
Capitolo 5 • Endoscopia innovativa
MA2 dato che al suo interno non sono presenti batterie. La potenza
elettrica viene trasmessa per induzione tramite un giubbino attivo che
il paziente indossa durante l’esame.
Per quanto riguarda la metodica di indagine è in tutto simile a quella
riportata per il caso precedente. Questo endoscopio consente inoltre di
compiere rotazioni, controllate dall’esterno, intorno al suo asse
longitudinale in modo da permettere al chirurgo la visione di tutte le
possibili aree di interesse.
Il progetto della zona ottica è di
grande interesse: i progettisti della
Norika sono riusciti, in un volume
ridottissimo, a inserire un’ottica che
consente la messa a fuoco dall’esterno
ed
un
sensore
CCD
da
ben
400.000 pixel. Anche il sistema di
illuminazione è innovativo. Come
mostrato in figura 5.10, oltre ai
Fig. 5.10
tradizionali led ultra bianchi sono stati
utilizzati altri due led, uno vicino all’infrarosso ed uno ad un’altra
lunghezza d’onda. Questo consente una visione dotata di maggiore
contrasto che permette al chirurgo di valutare meglio la profondità.
Dato il metodo di alimentazione, l’autonomia di funzionamento è
illimitata ed è quindi determinata solo dal tempo di attraversamento
del tubo digerente.
Infine nel progetto di questa capsula sono stati lasciati liberi due
vani corrispondenti al quaranta per cento del volume interno. Questo
spazio potrà essere utilizzato per implementare nuove funzioni, tra cui
per esempio, prelievo di campioni bioptici o somministrazione locale di
farmaci oppure altri utilizzi ancora. Allo stato attuale nessuna di
queste possibili funzionalità è stata messa a punto.
Il costo di una singola pillola è di circa 150 euro e come la MA2 non
viene recuperata dopo l’uso.
5.4 Endoscopi futuribili
5.12
Tesi di Dottorato di Luigi Gerovasi
Moltissimi gruppi di ricerca ed inventori di tutto il mondo hanno
rivolto la loro attenzione verso la realizzazione di dispositivi innovativi
per endoscopia. Perciò, in questa sede, non si vuole riportare una
trattazione completa sull’argomento ma solo alcuni esempi.
Comunque è importante sottolineare che sono migliaia i brevetti
depositati che spaziano dai prototipi di ispirazione meccanica a quelli
di ispirazione biologica a quelli di pura fantasia.
5.4.1
Intelligent Microsystem Center
Nel 2000 il governo coreano ha avviato un progetto di ricerca di
ampio respiro della durata di dieci anni con l’obiettivo di arrivare alla
realizzazione di una microcapsula endoscopica per il tratto
gastrointestinale.
Fig 5.11
Questo progetto è articolato in tre fasi: la prima, appena conclusa,
avente come risultato la progettazione di una pillola endoscopica
passiva in grado di inviare all’esterno immagini dell’intestino tenue; la
5.13
Capitolo 5 • Endoscopia innovativa
seconda, che terminerà nel 2005, dovrà concludersi con la
realizzazione di una capsula endoscopica in grado di inviare immagini
utili anche del colon e che possa muoversi autonomamente ed aderire
alle pareti intestinali; infine la terza fase, che si concluderà nel 2009,
ha con obiettivo finale una microcapsula endoscopica in grado di
ispezionare lo stomaco e tutto l’intestino, di avanzare e aderire
autonomamente e di essere usata di per fini diagnostici che
terapeutici.
In figura 5.11 è riportato uno spaccato di quello che potrebbe essere
il dispositivo finale. Al suo interno si spera di inserire numerosi sensori
ed attuatori. Le dimensioni finali stimate sono di 20 mm di lunghezza
ed 8 mm di diametro. Anche in questo progetto, per ora, si pensa di
realizzare l’adesione per aspirazione tramite una micropompa. Forse
questo è il punto su cui i ricercatori coreani dovranno faticare di più.
5.4.2
US 5595565
In questo paragrafo si descrive un brevetto registrato negli Stati
Uniti nel 1997. E’ stato progettato da W. S. Trimmer e M. Treat ed è
stato presentato con la seguente denominazione: Self-Propelled
Endoscope using Pressure Driven Linear Actuators. Si tratta di un
dispositivo semiautonomo in grado di avanzare nel tubo digerente.
Come mostrato nella figura 5.12, l’apparato proposto è dotato di
quattro attuatori pneumatici lineari comandati in sequenza da un
opportuno elemento di distribuzione. Il sistema è collegato con
l’esterno del paziente tramite un cavo guida con consente
l’approvvigionamento di aria e di potenza elettrica e lo scambio di dati.
Infatti nella parte anteriore è possibile montare sensori e una
telecamera.
5.14
Tesi di Dottorato di Luigi Gerovasi
Fig. 5.12
5.15