Il teorema fondamentale del calcolo
Versione da non divulgare. Scritta per comodità degli studenti. Può
contenere errori.
E NRICO R OGORA1
1
Dipartimento di Matematica
”Sapienza”, Università di Roma
Roma, Dicembre 2013
E NRICO R OGORA
Matematica e Statistica
Teorema della media integrale
Teorema Sia f un funzione continua su un intervallo [a, b]. Allora
Rb
esiste un punto c ∈ [a, b] tale che (b − a)f (c) = a f .
Dimostrazione Per il teorema di Weierstrass esistono xm ∈ [a, b] dove
la funzione f assume il suo valore minimo m = f (xm ) e xM ∈ [a, b]
dove la funzione f assume il suo valore massimo M = f (xM ). Come
immediata conseguenza della definizione di integrale di f su [a, b]
abbiamo
Z
b
f ≤ (b − a)M.
(b − a)m ≤
a
Per il teorema del valore intermedio, la funzione (b − a)f assume in
[a, b] tutti i valori compresi tra (b − a)m e (b − a)M, in particolare
Rb
quindi assumerà il valore a f . Esiste quindi c ∈ [a, b] tale che
Z
(b − a)f (c) =
b
f
a
E NRICO R OGORA
Matematica e Statistica
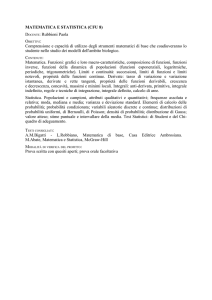
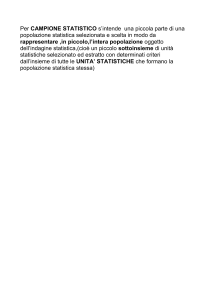
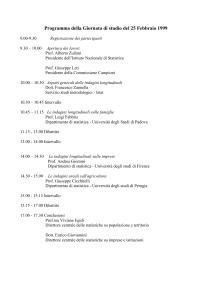
Interpretazione geometrica del teorema della media
integrale
0.2
0.4
0.6
0.8
1.0
Il valore dell’integrale (area in nero) è compreso tra il rettangolo di
base (b − a) e altezza m (area in verde) e il rettangolo di base (b − a)
e altezza M (area in blu) , e coincide con il rettangolo di base (b − a)
e altezza f (c) per un opportuno valore di c compreso tra a e b (area
in rosso).
0.0
0.2
0.4
E NRICO R OGORA
0.6
0.8
Matematica e Statistica
1.0
Il teorema fondamentale del calcolo
Sia f una funzione continua su un intervallo [a, b] e sia c un punto di
[a, b]. Consideriamo la funzione g definita da
Z x
g(x) =
f
c
Teorema fondamentale del calcolo: g 0 (x) = f (x)
g(x + h) − g(x)
g (x) = lim
= lim
h→0
h→0
h
0
R x+h
c
f−
h
R x+h
lim
h→0
x
h
Rx
c
f
f
=
hf (ξ)
= f (x)
h→0
h
= lim
la penultima uguaglianza per il teorema della media integrale
(ξ ∈ [x, x + h]) e l’ultima per la continuità di f , in quanto ξ tende a x
quando h tende a zero.
E NRICO R OGORA
Matematica e Statistica
La soluzione della eq. differenziale f 0 = 0
Consideriamo l’equazione differenziale f 0 (x) = 0, per ogni x in un
dato intervallo I. L’incognita è una funzione, definita su I. Vogliamo
dimostrare che le soluzioni di questa equazione differenziali sono
tutte e sole le funzioni costanti su I. Sia a ∈ I e sia x ∈ I. Per il
teorema di Lagrange esiste y ∈ (a, x) tale che,
f (x) − f (a) = (x − a)f 0 (y ). Essendo f 0 identicamente nulla su I,
f (x) = f (a), per ogni x ∈ I.
Attenzione!!
La dimostrazione funziona quando consideriamo l’equazione su un
intervallo. Se la consideriamo su più intervalli disgiunti la stessa
dimostrazione implica che ogni soluzione di f 0 (x) = 0 è localmente
costante, ovvero è costante su ogni intervallo, ma questa costante
può cambiare da un intervallo all’altro. Per esempio, la funzione
−1 se x < 0
f (x) =
1 se x > 0
è soluzione dell’equazione differenziale f 0 = 0 su (−∞, 0) ∪ (0, +∞).
E NRICO R OGORA
Matematica e Statistica
La soluzione dell’equazione differenziale f 0 = g
Consideriamo l’equazione differenziale f 0 = g dove f è una funzione
incognita e g una funzione data. Osserviamo innanzitutto che, se f1 e
f2 sono due soluzioni di questa equazione, la loro differenza è
soluzione dell’equazione differenziale f 0 = 0, che abbiamo discusso
nella slide precedente. Quindi, se decomponiamo il dominio di
definizione della funzione incognita nell’unione di intervalli aperti
disgiunti, la soluzione dell’equazione f 0 = g è definita a meno di una
costante, diversa per ogni intervallo. In particolare, che è il caso che
considereremo quasi sempre, se consideriamo l’equazione su un
intervallo, la soluzione è definita a meno di una costante.
Per il teorema fondamentale del calcolo inoltre, la soluzione
dell’equazione f 0 = g su un intervallo I si può scrivere, utilizzando
l’operazione di integrazione nella forma
Z x
g
f (x) =
a
dove a è un qualunque punto di I. Se cambiamo a con b ∈ I, la
Rx
Rx
Rb
differenza tra le soluzioni a g e b g è la costante a g.
Ogni soluzione dell’equazione f 0 = g si chiama primitiva di g.
E NRICO R OGORA
Matematica e Statistica
Esempi
Diamo alcuni esempi di primitive di funzioni elementari, ricordandoci
sempre che se la funzione è definitra su un intervallo la primitiva è
definita a meno di una costante
Funzione
x
x α , α 6= −1
1/x
1/x
ex
cos x
sin x
1/(1 + x 2 )
Primitiva
x 2 /2 + c
x α+1
α+1 + c
log x + c
log |x| + c1 χ(−∞,0) + c2 χ(0,+∞)
ex + c
sin x + c
− cos x + c
arctan x + c
E NRICO R OGORA
Matematica e Statistica
Intervallo
su R
su (0, +∞)
su (0, +∞)
su (−∞, 0) ∪ (0, +∞)
su R
su R
su R
su R
Il calcolo delle primitive e il calcolo degli integrali
definiti
Se conosciamo una primitiva f di una funzione g su un intervallo I il
teorema fondamentale del calcolo ci permette di concludere che, per
ogni a, b ∈ I
Z b
g = f (b) − f (a)
a
Per esempio,
Z
1
x 2 = 1/3
0
1
Z
xn =
0
Z
1
n+1
n∈N
π
sin x = − cos(π) + cos(0) = 1.
0
D’altra parte per molte funzioni elementari, la primitiva NON È UNA
FUNZIONE ELEMENTARE e quindi non abbiamo formule esatte per il
calcolo de corrispondenti integrali definiti. L’esempio più importante è
2
la funzione f (x) = e−x .
E NRICO R OGORA
Matematica e Statistica
Integrale improprio
Abbiamo visto come calcolare l’integrale di una funzione continua su
un intervallo chiuso [a, b].
Può succedere di voler calcolare l’integrale di una funzione continua
su un intervallo aperto (a, b), quando la funzione diverge (ciè il limite
diventa infinito) al tendere di x ad a, a b o ad entrambi
i valori
R +∞
1
.
(eventualmente a = −∞ e/o b = +∞), per esempio 1
x2
Possiamo talvolta calcolare un tale integrale con un passaggio al
limite. Vediamo come in un paio di esempi
Z t
Z +∞
1
1
1
−1 t
=
lim
−
=
lim
=
lim
−x
+
1
=1
1
t→+∞ 1 x 2
t→+∞
t→+∞
x2
t
1
oppure
Z
0
1
1
x 1/2
Z
= lim+
t→0
t
1
1
x 1/2
1
= lim+ 2x 1/2 = lim+ 2 − 2t 1/2 = 2
t→0
t
t→0
Questi integrali si chiamano impropri.
E NRICO R OGORA
Matematica e Statistica
Notazione per le primitive
R
Indichiamo con f (x) dx una funzione la cui derivata coincide con f ,
cioè una primitiva di f . Sappiamo che la primitiva è definita a meno di
una costante per ogni componente
connessa dell’intervallo di
R
definizione di f . Scriveremo f (x) dx ∼ g per indicare che g è una
primitiva di f . Supponendo che il dominio di f si possa scrivere come
unione disgiunta di intervalli I1 ∪ · · · ∪ Im , e che
Z
Z
f (x) dx ∼ g
f (x) dx ∼ h
allora g − h = c1 χI1 + · · · + cm χIm , dove χI indica la funzione
caratteristica dell’intervallo I, ovvero la funzione che vale 1 per i valori
della variabile che appartengono all’intervallo I e vale 0 per i valori
della variabile che non appartengono all’intervallo I.
E NRICO R OGORA
Matematica e Statistica
Integrazione per sostituzione diretta
Supponiamo di conoscere la primitiva F di una funzione f , per
esempio sappiamo che F (x) = sin x è una primitiva di f (x) = cos x.
Possiamo facilmente determinatre una primitiva di f (g(x)) · g 0 (x).
Basta prendere F (g(x)). Infatti
(F (g(x)))0 = F 0 (g(x)) · g 0 (x) = f (g(x)) · g 0 (x).
Simbolicamente
Z
Z
f (g(x))g 0 (x) dx ∼
f (u) du u=g(x)
Esercizi
R
R
2
3
R 2 cos 2x dx ∼ sin 2x, sin xRcos x 2dx ∼ sin x/3,
(1/(x + a)) dx ∼ log |x + a|, 1/(x + 2x + 2) ∼ arctan(x + 1)
E NRICO R OGORA
Matematica e Statistica
Integrazione per sostituzione diretta: Esempio
R
2
Vogliamo calcolare 2x · ex dx. La funzione integranda ha forma
f (g(x))g 0 (x) con f (u) = eu , g(x) = x 2 e quindi g 0 (x) = 2x. Allora,
usando la forma generale
Z
Z
0
f (g(x))g (x) dx ∼
f (u) du u=g(x)
abbiamo
Z
x2
Z
2x · e dx ∼
e du u
E NRICO R OGORA
u=x 2
∼ eu |u=x 2 = ex
Matematica e Statistica
2
Integrazione per parti
Come conseguenza della formula di Leibniz per la derivata del
prodotto, abbiamo che
Z
Z
f (x)g 0 (x) dx = f (x)g(x) − f 0 (x)g(x) dx.
Esercizi
R
x sin x dx ∼ −x cos x + sin x,
x 2 cos x dx ∼ x sin x + 2x cos x − 2 sin x, x 3 sin x, xe−x , x cos 3x,
x(x − 4)1/2 , x 2 log x.
E NRICO R OGORA
Matematica e Statistica
Integrazione per parti: Esempio
R
Vogliamo calcolare log x dx ∼ x log x − x. La funzione integranda fa
forma f (x)g 0 (x) con f (x) = log x e g 0 (x) = 1, e quindi g(x) = x.
Allora, usando la formula generale
Z
Z
f (x)g 0 (x) dx = f (x)g(x) − f 0 (x)g(x) dx.
abbiamo
Z
Z
Z
1
· x dx ∼ x log x − dx ∼ x log x − x.
log x dx ∼ x log x −
x
E NRICO R OGORA
Matematica e Statistica
Integrazione di funzioni razionali (I)
È possibile integrare ogni funzione razionale (cioè quoziente di due
polinomi) attraverso la tecnica della espansione in frazioni parziali.
Non discuteremo questa tecnica in generale ma forniremo solo alcuni
esempi, cominciando da alcuni casi elementari
Z
(ax + b)n+1
(ax + b)n dx ∼
se x 6= −1
a(n + 1)
Z
log |ax + b|
1
dx ∼
ax + b
a
Z
1
dx ∼ arctan x.
1 + x2
Osserviamo che possiamo sempre assumere che la funzione
razionale che vogliamo integrare abbia forma f (x) = P(x)/Q(x) con
grado di P(x) minore del grado di Q(x) (funzione razionale propria),
altrimenti, usando l’algoritmo di divisione tra polinomi, possiamo
assumere che P(x)/Q(x) = T (x) + R(x)/Q(x), con T (x) polinomio,
che sappiamo integrare direttamente, e R(x) polinomio di grado
minore del grado di Q(x).
E NRICO R OGORA
Matematica e Statistica
Integrazione di funzioni razionali (II)
Quando il denominatore ha radici reali distinte, possiamo procedere
come nel seguente esempio, in cui si sostituisce l’integrando
1
3
4x−1
(x−1)(x+2) con x−1 + x+2 .
Z
4x − 1
dx ∼ log |x − 1| + 3 log |x + 2|
(x − 1)(x + 2)
Vale in generale il seguente
Teorema
Se P(x)/Q(x) è una funzione razionale propria dove Q(x) è un
polinomio di grado n che ammette n radici reali distinte a1 , . . . , an ,
allora esistono numeri A1 , . . . , An tali che
A2
An
P(x)
A1
=
+
+ ··· +
Q(x)
x − a1
x − a2
x − an
E NRICO R OGORA
Matematica e Statistica
Integrazione di funzioni razionali (III)
Quando il denominatore ha radici reali, non tutte distinte possiamo
procedere come nel seguente esempio, in cui si sostituisce
4
8
14
2x 2 +6
l’integrando (x−1)
2 (x+2) con 9(x−1) + 3(x−1)2 + 9(x+2) .
Z
2x 2 + 6
4
8
14
dx ∼ log |x − 1| −
+
log |x + 2|
2
(x − 1) (x + 2)
9
3(x − 1)
9
Vale in generale il seguente
Teorema
Se P(x)/Q(x) è una funzione razionale propria dove Q(x) è un
polinomio di grado n che ammette, tra le sue radici, la radice a
ripetuta esattamente k volte, allora esistono A1 , . . . , Ak tali che
P(x)
Ak
A1
A2
=
+
+ ··· +
+ ...
Q(x)
x − a (x − a)2
(x − a)k
E NRICO R OGORA
Matematica e Statistica
Integrazione di funzioni razionali (IV)
Quando Q(x) ammette radici complesse coniugate, per ottenere
l’espansione in frazioni parziali, è necessario considerare anche
termini del tipo
Ax + B
x 2 + bx + c
e
Ax + B
(x 2 + bx + c)m
Non approfondiremo questo caso in queste lezioni.
E NRICO R OGORA
Matematica e Statistica
Integrazione per sostituzione inversa
La tecnica di sostituzione
inversa riduce la valutazione degli integrali
R
0
indefiniti
della
forma
f
(g(x))g
(x) dx a quella degli integrali
R
f (v ) dv .
Talvolta
capita la situazione inversa. Non sappiamo calcolare
R
f (x) dx ma riusciamo a trovare
una funzione invertibile h per cui
R
siamo in grado di calcolare f (h(v ))h0 (v ) dv . Formalmente
Z
Z
f (x) dx ∼
f (h(v ))h0 (v ) dv v =g(x)
dove g è la funzione inversa di f .
Esempio
√
2
Per esempio,
√se x > 0, f (x) = 1/( x + 1), x = h(v ) = v ,
v = g(x) = x, allora
Z
Z
Z
1
2v √
dx ∼
f (h(v ))h0 (v )
∼
v + 1 v =√x
( x + 1)
v =g(x)
E NRICO R OGORA
Matematica e Statistica
Integrazione per sostituzione inversa: esempi
Esempio 1
√
f (x) = 1 − x 2 . Basta porre x = h(v ) = sin v , v = g(x) = arcsin x.
Esempio 2
f (x) = 1/(cos x + sin x), x = h(v ) = 2 arctan v , v = g(x) = tan x/2.
Nota che cos h(v ) = (1 − v 2 )/(1 + v 2 ) e sin h(v ) = 2v /(1 + v 2 ).
Si noti che la sostituzione suggerita nel secondo esempio permette di
trasformare l’integrale di una funzione razionale in sin e cos
nell’integrale di una funzione razionale in x, per cui esiste un metodo
generale di integrazione.
E NRICO R OGORA
Matematica e Statistica
Integrazione per sostituzione: casi semplici
R
Per integrare (ax + b)n dx, pongo v = ax + b, allora dv = adx.
R
R
v n+1
Sostituendo, (ax + b)n dx = v n dv
a ∼ a(n+1) e sostituendo di nuovo
otteniamo
Z
(ax + b)n+1
(ax + b)n dx ∼
a(n + 1)
R 1
Per integrare ax+b dx, pongo v = ax + b e procedo come sopra.
Esercizio
Integrare
R
1
.
c 2 +(ax+b)2
E NRICO R OGORA
Matematica e Statistica
Applicazioni dell’integrale
Rb
L’integrale a f dx permette di calcolare l’area della regione di piano
comprese tra il grafico della funzione non negativa f e l’intervallo [a, b] sopra
il quale tale grafico è definito. Oltre all’area esistono altre quantità
matematiche e fisiche che possono essere calcolate attraverso l’integrale:
lunghezza, volume, lavoro, baricentro, momento di inerzia.
Consideriamo il problema di calcolare il volume di un solido di cui si
conoscono le aree delle sezioni del solido con i piani perpendicolari all’asse
delle ascisse. Indichiamo con π(x) il piano perpendicolare all’asse delle
ascisse e passante per il punto di tale asse di coordinata x e con A(0) l’area
della sezione del solido con il piano π(x). Supponiamo che il solido sia
compreso tra i piani π(a) e π(b). Allora il volume V del solido si calcola come
b
Z
V =
A(x) dx
a
Per esempio, se il solido si ottiene ruotando rispetto all’asse x l’area
compresa tra il grafico della funzione f nel piano x, y e il segmento [a, b]
sull’asse delle x
Z
b
V =
π · f (x)2 dx
a
E NRICO R OGORA
Matematica e Statistica
Esempi
Volume del cono ottenuto ruotando il segmento della retta y = x
sull’intervallo [0, 1] è
Z
1
V =
0
πx 2 dx =
π
3
√
La sfera di raggio r si puè generare ruotando la curva y = r 2 − x 2
attorno all’intervallo [−r , r ]. Quindi il volume della sfera è
r !
Z r
x 3 4
2 3
2
2
2 r
3
π(r −x ) dx = π r x −r −
= π 2r − r
= πr 3
V =
3
3
3
−r
−r
E NRICO R OGORA
Matematica e Statistica