Fabrizio Valpreda
VIRTUAL DESIGN
possibilità progettuali e comunicative del digitale
“quaderni di design”
Time&Mind Press
Torino, 2004
ISBN 88-901128-3-2
I recenti anni di sviluppo di tutto ciò che, digitale, si
esprime con una sequenza di zero e uno, hanno
visto proliferare strumenti software sempre più
sofisticati che spesso travalicano le capacità
dell'utente finale ponendolo in una condizione di
inferiorità espressiva.
Il distacco tra strumento e utente è paradossale
poichè il miglioramento dei software dovrebbe
portare nella direzione opposta; purtroppo accade
sempre più spesso che funzioni nuove non sono
untilizzate ma al contrario costituicono una
complicazione in più per chi, in ultima analisi, deve
imparare a progettare o, più semplicemente,
“consegnare il lavoro in tempo”.
Si vuole in questa occasione presentare alcune
considerazioni, sulla base di esperienze didattiche e
professionali, che vorrebbero spezzare una lancia
in favore di un minimalismo strumentale opposto al
pachidermico incalzare di software complessi,
pesanti, costosi, e, per questo, spesso
sottoutilizzati, se non lesivi dell'efficienza.
Efficienza che non deve essere considerata solo in
termini monetari ma prima di tutto in termini di
rapidità di esecuzione di compiti basilari come quelli
del disegno 3D e della visualizzazione del progetto:
il designer deve poter dominare tutte le fasi del
progetto fin dalle prime fasi del lavoro e combattere
con i software non aiuta a porsi nella giusta ottica
progettuale.
In questo senso è importante definire una cultura
del progetto virtuale in cui si chiarisca fin da subito
l'importanza fondamentale del cosa in
contrapposizione al come.
La figura del virtual designer: richiesta e offerta
sul piano formativo del Corso di Laurea in Virtual
Design del Politecnico di Torino
Il corso di laurea in Graphic and Virtual Design nasce dalle ceneri
della vecchia scuola di Tecniche e Arti della Stampa: questa, da
diploma, è stata trasformata in un corso di laurea.
Riteniamo fondamentale in questo corso che l’approfondimento
delle tematiche della grafica e della virtualità sia svolto fornendo agli
studenti una base culturale che serve da fondazione alla
preparazione complessiva: questa caratteristica è da noi fortemente
voluta per dare la possibilità ai ragazzi di produrre progetti che
posseggano un valore aggiunto rispetto all’esistente e che abbiano
una continuità di valore nel tempo.
Nella virtualità si verifica troppo frequentemente
un uso
indiscriminato delle tecnologie informatiche sacrificando con troppa
facilità il contenuto del progetto a favore delle tecniche di
rappresentazione: si manifesta quindi un marcato scollamento dalla
formazione culturale che costituisce invece il vero motore del
progetto. In questo senso noi cerchiamo di dare da una parte una
grossa formazione culturale e parallelamente una preparazione
tecnica specifica mirata alla definizione del progetto.
Un’altra delle caratteristiche del corso è il numero chiuso: si è
deciso di accettare un numero ridotto di studenti, solo ottanta, per
concentrare le risorse didattiche sulla preparazione professionale di
alto livello. Riteniamo di avere delle grandi responsabilità
nell’insegnamento e il nostro obiettivo risulta quindi essere la
creazione di professionalità che siano spendibili nel mercato del
lavoro.
All’interno del Laboratorio Modelli Virtuali del Cisda mi occupo di
insegnamento delle tecniche di rappresentazione del progetto di
architettura e di design con l'uso di strumenti informatici. In questa
ottica negli ultimi anni ci siamo resi conto che uno dei problemi più
importanti e più pressanti da risolvere non è tanto l'insegnamento
dello strumento informatico quanto la relazione tra l’oggetto da
rappresentare e la sua rappresentazione: infatti quello che si è
perso nel tempo è la percezione della realtà fisica che ci circonda a
favore della simulazione che un computer può farne. Il problema è
legato al fatto che mentre da un lato lo studente si presenta molto
flessibile nell'apprendimento delle tecniche, trova molte difficoltà nel
momento in cui, appresi gli strumenti di modellazione, di
illuminazione e di texturing, deve applicarli alla soluzione di un
problema reale quindi alla rappresentazione di un progetto vero e
proprio o di un oggetto esistente. Ciò che abbiamo quindi cercato di
fare è tentare di smontare il problema suddividendolo nelle sue parti
principali. Ci siamo quindi chiesto cosa poter fare quando dobbiamo
insegnare a dei ragazzi che sono molto veloci ad apprendere l'uso
dei programmi ma hanno delle difficoltà nella relazione tra reale e
virtuale.
Il primo obiettivo è chiarire da subito l’identità dello strumento
informatico per estrapolare da esso le caratteristiche fondamentali e
le differenze tra i diversi tools a disposizione; ancora più importante,
anche se solo apparentemente superfluo, risulta essere la necessità
di chiarire la finalità degli strumenti: sono semplicemente programmi
che servono a rappresentare la realtà, non a riprodurla.
L’operazione di “dissassemblaggio” della realtà conduce a quelli che
sono i tre ingredienti principali della nostra “torta digitale”, ovvero la
scena tridimensionale: il modello, la luce ed i materiali.
Questi tre elementi vengono spesso trascurati o, al contrario,
addirittura troppo elaborati dallo studente che, trovandosi a
disposizione innumerevoli funzionalità nei software, arricchisce il
modello tridimensionale di dettagli che il risultato finale non
evidenzierà oppure trascura elementi fondamentali come lo studio
delle ombre e delle penombre che la luce indiretta genera in una
qualsiasi scena.
Senza entrare nel merito delle diverse tipologie di rappresentazione
fotorealistica o non fotorealistica, quello che vogliamo cercare di
capire è quali sono i problemi legati a questo binomio reale-virtuale.
Il primo è quindi un problema di modellazione.
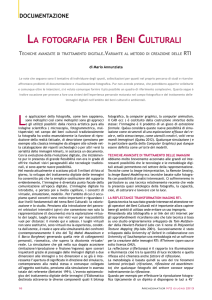
fig.1
oggetti in shading con caratteristiche di modellazione a diversi livelli
di dettaglio
Osservando fig.1 a partire dal lato sinistro si osserva una primitiva
tridimensionale di tipo cilindro costruita secondo le sue
caratteristiche teoriche cioè l'estrusione di un cerchio lungo l'asse
perpendicolare al cerchio stesso con un'altezza e un diametro dati.
Questo tipo di oggetto teorico in realtà non esiste per cui nel
momento in cui si modella una forma di questo genere si devono
introdurre quelle deformazioni che la natura dell’oggetto provoca,
procedendo quindi ad approssimazioni successive: in questa fase
nascono i primi problemi poichè gli studenti si trovano spesso nella
possibilità e nel desiderio di sfruttare computer e programmi molto
potenti e vengono invogliati ad addensare le informazioni.
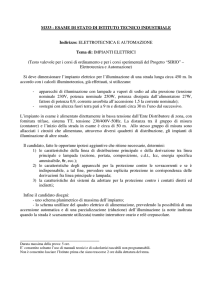
In fig.2 si può osservare un esempio di ottimizzazione dei parametri
di illuminazione e texturing in cui la scena iniziale è stata ridotta
come numero di poligoni e la luce indiretta è stata calcolata con una
tecnica mista di luci aggiuntive e Global Illumination portando i tempi
di calcolo ad un decimo rispetto alle impostazioni iniziali senza
ridurre in modo percettibile la qualità dell’immagine.
fig.2
interno con illuminazione di tipo misto scanline/raytrace e G.I.
L'obiettivo principale che ci poniamo durante le lezioni è quindi
quello di far sempre ragionare gli studenti in merito allo scopo da
raggiungere: insegnare loro un uso ottimizzato delle tecniche che
consenta di ottenere esattamente i risultati voluti concentrandosi fin
da subito su di essi e non sui software utilizzati per ottenerli. Allora
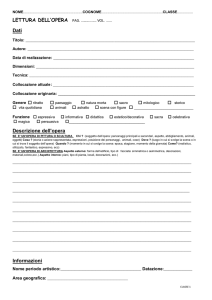
nella riproduzione del cilindro di cui sopra si può passare ad un
accenno di spigoli nelle due facce superiori e poi a un leggera
flessione ad esempio allo scopo di riprodurre una parte di tronco di
legno (fig.3).
Il problema successivo in ordine di importanza è quello della luce
che in realtà risulta essere uno dei più complessi e anche quello che
riesce a fare la differenza.
fig.3
il modello con texturing a diversi livelli di dettaglio
Si preferisce, nel percorso didattico, dare priorità alla luce e al suo
comportamento nella realtà poiché il propagarsi della radiazione
luminosa nell’ambiente che ci circonda fornisce, molto più del
colore, la tridimensionalità agli oggetti.
Penombre, colore della luce, profondità di penetrazione negli spazi
chiusi sono caratteristiche che possono dare ad un ambiente
totalmente bianco quel carattere che spesso manca in immagini
ricche di texture e materiali sofisticati.
Analogamente alla luce si deve affrontare il tema dei materiali: la
loro preparazione va guidata con un percorso conoscitivo del
progetto in cui colore, riflessioni diffuse e speculari, rugosità e
imperfezioni vengono calibrate allo specifico scopo di ottenere il
risultato voluto, senza lasciarsi influenzare dalle possibilità tecniche
offerte dai software; quando queste costituiscono, come spesso
accade, un vincolo stringente, si deve operare allo scopo di
trasformare i limiti del programma in vantaggi operativi.
Le immagini seguenti sono un esempio del lavoro svolto secondo i
criteri esposti.
La luce e gli strumenti per la sua simulazione
L’illuminazione di interni
Un progettista che utilizza il computer per simulare, verificare e
presentare i propri progetti con le tecnologie attuali non può
prescindere da un legge mai scritta che recita più o meno così: “il
perfetto strumento informatico di simulazione della luce non esiste”
Questa affermazione, per essere l’incipit di un articolo che intende
analizzare le attuali metodologie di simulazione del comportamento
della luce, può suonare pessimistica, ma in realtà conduce al
nocciolo del problema della visualizzazione tridimensionale digitale
di una scena simulata con software commerciali. Una qualsiasi
simulazione virtuale di un progetto architettonico non può essere
effettuata con una sola tecnica, perché nessuna tecnica da sola è in
grado, ad oggi, di restituire risultati “assoluti”. Questo significa che
di volta in volta si utilizzerà la più opportuna tecnica di simulazione
del comportamento della luce.
Di seguito saranno analizzate le potenzialità delle tecniche di
rendering attualmente disponibili nei software commerciali
comunemente utilizzati dagli architetti per la visualizzazione, la
verifica e la presentazione dei progetti. Si tratta di programmi di alto
livello qualitativo che offrono in genere un completo set di strumenti
per le più diffuse necessità progettuali.
Gli algoritmi base di simulazione
Nel corso degli ultimi anni si sono consolidati fondamentalmente tre
algoritmi che consentono di simulare in 3D il progetto
architettonico/illuminotecnico: Radiosity, Global Illumination (G.I.) e
Scanline/Raytracing.
Senza entrare troppo nel dettaglio dei suddetti algoritmi proviamo a
dare una loro descrizione di massima per capire soprattutto quali
siano i vantaggi e gli svantaggi di ciascuno di essi.
Primo per nascita e diffusione, il metodo Scanline/Raytracing
calcola il solo apporto di luce diretta, senza nessuna possibilità di
prevedere il viaggio della radiazione visibile, una volta che questa
abbia colpito gli oggetti e non considera quindi le riflessioni
secondarie.
Con questo metodo, velocissimo nel calcolo, è necessario ipotizzare
il comportamento della luce e introdurre nella scena sorgenti virtuali
aggiuntive che simulino la diffusione indiretta da un oggetto all’altro.
La Global Illumination (G.I.) è un metodo di calcolo il cui sviluppo
deriva dall’algoritmo Raytracing. Viene utilizzato per le sue
caratteristiche di estrema flessibilità ed efficienza: il suo
funzionamento, concettualmente semplice prevede l’emissione di
raggi di luce (chiamati photons per ricordare i fotoni propri della
radiazione luminosa) dalle sorgenti presenti in scena. A partire da
alcuni punti, (definibili numericamente dall’utente) delle superfici
illuminate direttamente, viene emessa una serie di raggi secondari
(anche questi definibili dall’utente) che colpiscono gli oggetti
circostanti in un processo iterativo la cui fine è imposta dall’utente. Il
tutto viene calcolato per l’immagine statica allo scopo di risparmiare
sui tempi di calcolo: in pratica i raggi che, rimbalzando colpiscono
oggetti nascosti al punto di vista scelto per l’immagine, vengono
trascurati. Nel caso in cui sia necessario realizzare un’immagine da
un diverso punto di vista sarà possibile utilizzare la mappa di raggi
(photon map) già calcolata incrementandola solo con i nuovi raggi
necessari.
Il metodo Radiosity calcola la luce indiretta attraverso la
suddivisione delle superfici in mesh, a densità variabile,
caratterizzate da poligoni più piccoli in prossimità delle zone di
contatto tra diverse superfici.
L’algoritmo di tipo Radiosity viene utilizzato soprattutto nei casi in cui
risulti necessaria una verifica scientifica del reale bilancio energetico
all’interno di un ambiente. É infatti possibile “interrogare” i risultati
del rendering per conoscere le condizioni di illuminazione degli
oggetti a seguito della radiazione diretta ed indiretta (riflessioni
secondarie) avendo come risposta dal software valori
numericamente corretti. I valori calcolati sono ottenuti a partire dai
dati teorici di riferimento della ripartizione spaziale dell’intensità
luminosa degli apparecchi di comune produzione e/o
dell’illuminazione naturale dovuta al sole ed alla diffusione dovuta
all’atmosfera terrestre, nei diversi giorni dell’anno.
Con la suddetta tecnica è possibile utilizzare, attraverso opportuni
formati (come, ad esempio il formato IES), i files di descrizione degli
apparecchi illuminanti, simulando in questo modo le diverse
condizioni di illuminazione con l’utilizzo di diversi tipi di sorgenti
artificiali.
Non ultima risulta essere estremamente interessante la possibilità di
navigare in tempo reale la scena 3D grazie al fatto che la soluzione
radiosity viene salvata nel file del modello 3D e può essere
ricaricata automaticamente alla sua riapertura, senza necessità di
ricalcolare il rendering, poiché il bilancio energetico della radiazione
luminosa è indipendente dal punto di vista.
Il metodo Scanline/Raytracing, nonostante risulti apparentemente
inutile agli scopi specifici della verifica illuminotecnica del progetto
architettonico, (dove, in genere, la maggior parte dell’illuminazione
dipende dalla componente indiretta), viene ancora massicciamente
utilizzato grazie alla eccellente velocità di calcolo ed alla grande
flessibilità data dal fatto che la luce può essere “pilotata”. Per questo
viene specialmente utilizzato per immagini che hanno uno scopo
comunicativo e non per verifiche illuminotecniche: vedremo tuttavia
come, nonostante i suddetti limiti, questo metodo riservi, se
correttamente utilizzato, delle gradite “sorprese”.
Pregi e difetti
A questo punto la domanda che può sorgere nel lettore è: “ma
allora quale tecnica devo utilizzare per la visualizzazione del mio
progetto?”
La risposta è, come spesso accade nel mondo dell’informatica,
dipende.
Dipende prima di tutto dallo scopo che si vuole raggiungere: la
simulazione illuminotecnica oppure la verifica dei materiali e delle
finiture superficiali oppure ancora la semplice presentazione del
progetto.
Dipende dal budget a disposizione: tecniche più sofisticate
richiedono in genere tempi di calcolo molto più onerosi e hardware
più potente.
Dipende, almeno per gli studi di progettazione più piccoli, dalle
conoscenze già acquisite sui vari software e dalla possibilità di
allargare il know-how a nuove tecniche, magari non sempre
utilizzabili, quindi non meritevoli di investimento.
Tuttavia, indipendentemente dagli obiettivi da raggiungere, dal
denaro a disposizione e dal numero di persone nel gruppo di lavoro,
se è vero che nessuna delle tecniche descritte è perfetta, come
facciamo a sfruttare al meglio ciascuna di esse e come è possibile
verificare le differenti prerogative nelle diverse condizioni di utilizzo?
E ancora, è possibile utilizzare un metodo misto che tragga da
ciascuna delle tecniche suddette solo il meglio che è in grado di
fornire?
Certamente le risposte sono positive: anche nei campi di
applicazione più estremi, come ad esempio gli effetti speciali
cinematografici, le tecniche miste sono quelle che da sempre
consentono di ottenere i migliori risultati.
Ciò che faremo ora è sperimentare quanto detto su un esempio
pratico: cercheremo di riprodurre le stesse condizioni di
illuminazione naturale e artificiale con le tre tecniche descritte e
confronteremo i risultati dal punto di vista qualitativo e dei tempi di
rendering (ovviamente a parità di macchina di calcolo).
Illuminazione naturale
fig.4
Scena di prova, versione shaded
La scena di prova (fig.4) è un classico esempio in cui l’apporto della
luce indiretta è fondamentale, costituendo così una palestra di prova
ardua e inflessibile per un software di rendering: una stanza
illuminata da una finestra che lascia entrare la luce solare che incide
sul pavimento. All’interno della stanza sono disposti alcuni tipici
oggetti che consentono di vedere il comportamento della
simulazione nelle zone di penombra e nelle parti più critiche, ossia
le aree di contatto tra diverse geometrie.
Alcuni oggetti in scena (la parete a sinistra in mattoni a vista ed il
pavimento in doghe di legno) sono costituiti da materiali con
caratteristiche superficiali diverse cha danno origine a rugosità e
riflessioni. Gli altri oggetti sono privi di particolari caratteristiche
superficiali e sono dotati di semplici colori uniformi. Bisogna tenere
presente che i software commerciali attualmente disponibili
considerano tutti gli oggetti uniformemente diffondenti; le specularità
sono trattate a livello visivo. Il comportamento energetico in
riflessione di uno specchio (ad es. la riflessione di un fascio
luminoso) può essere simulato con la tecnica del calcolo delle
cosiddette caustiche, della quale non tratteremo nella presente
analisi.
fig.5
Scena di prova, simulazione calcolata con algoritmo
scanline/raytracing
Il metodo scanline/raytracing (fig.5) fornisce risultati variabili a
seconda della capacità dell’operatore di utilizzare le fonti luminose
del software a disposizione: essendo il metodo suddetto privo della
possibilità di calcolo della luce indiretta risulta infatti necessario dare
luce dove questa non può essere calcolata automaticamente.
fig.5a
Scena di prova, disposizione delle sorgenti virtuali aggiuntive per
l’algoritmo scanline/raytracing per la simulazione della componente
diffusa
In fig.5a si può vedere la disposizione di sorgenti aggiuntive che
nella realtà della scena di esempio non esistono; tali sorgenti,
opportunamente configurate consentono di simulare rapidamente la
luce diffusa. Tale configurabilità è il trucco che consente
all’operatore di simulare la luce diffusa, altrimenti non calcolabile in
automatico dal metodo utilizzato.
Il metodo scanline/raytracing risulta quindi essere estremamente
efficiente (15min:38sec) nonostante sia ovviamente necessaria una
grande esperienza da parte dell’utente per ovviare alle mancanze
del software: una configurazione non corretta delle sorgenti
aggiuntive restituisce un’immagine qualitativamente inaccettabile.
Con la G.I. si può ottenere il calcolo della luce diffusa ma soprattutto
si riescono a simulare automaticamente tutti i tipi di materiali
immaginabili: dalla rifrazione alla diffrazione, dalla traslucenza alla
riflessione sfocata, fino al displacement mapping per le rugosità
superficiali complesse.
Fig.6
Scena di prova, simulazione calcolata con algoritmo GI
In fig.6 si può osservare l’estrema qualità ottenibile con il calcolo G.I
(3h:07min:25sec):
il
metodo
infatti,
come
anticipato
precedentemente, calcola la luce diffusa solo per le parti della
scena che si vedono dal punto di vista prescelto. Per renderizzare
altri punti di vista si devono incrementare le informazioni della
photon map con un calcolo aggiuntivo delle componenti trascurate.
L’algoritmo radiosity, fisicamente corretto, genera un illuminazione
estremamente verosimile e diffusa correttamente nella scena;
mostra tuttavia il fianco nella qualità dei materiali: rifrazioni,
traslucenza e soprattutto rugosità superficiale, caratteristiche tutte
ottenibili con i materiali a disposizione dei più diffusi software di
rendering, si perdono o vengono pesantemente semplificate (fig.7).
fig.7
Scena di prova, simulazione calcolata con algoritmo radiosity
Osservando l'aspetto delle pareti in mattoni ed intonaco si deduce
che l'effetto di rugosità viene simulato con grande qualità solo con i
metodi scanline/raytracing e G.I. La qualità dei metalli e delle
riflessioni sfocate (mensola libreria a sinistra e piede del tavolino al
centro) è ottima solo nel calcolo G.I. mentre negli altri presenta
artefatti e macchie non verosimili.
L’unica possibilità per ovviare al problema è salvare la soluzione
radiosity e ricalcolare l’immagine con un metodo raytracing che
supporti le caratteristiche di cui sopra.
I tempi di calcolo per l’immagine di fig.4 non sono elevati
(1h:20min:45sec) e comunque compensati dal fatto che, definito
l’impianto luci, il calcolo viene effettuato una sola volta per qualsiasi
punto di vista da cui si decida di “fotografare” il modello.
Illuminazione artificiale
Interessante a questo punto è verificare i concetti esposti finora in
una situazione di simulazione di luce artificiale. La stessa scena
utilizzata per il caso dell’illuminazione naturale è anche banco di
prova per l’illuminazione artificiale. Valgono quindi le stesse
considerazioni sulle caratteristiche dei materiali presenti in scena
già esposte.
Per simulare l’illuminazione artificiale, è’ stato inserito un corpo
illuminante (plafoniera da ufficio con due tubi fluorescenti) a centro
volta e annullato completamente il contributo della radiazione
naturale (scena notturna). Nuovamente è stata calcolata la
simulazione con i tre metodi esposti finora.
Le osservazioni fatte precedentemente risultano essere tutte
confermate, si nota però che le differenze tra i vari metodi di calcolo
si accentuano.
Osservando le figg. 8, 9 e 10 si nota che gli algoritmi
scanline/raytracing (fig.8) e G.I. (fig.9) accentuano il contrasto tra
zone illuminate e zone in ombra, dando così agli oggetti una
maggiore tridimensionalità. Nuovamente è stato necessario
aggiungere delle sorgenti virtuali per simulare la componente diffusa
nel caso dell’algoritmo scanline/raytracing.
Con il metodo radiosity (fig.10) le penombre sono molto penalizzate
e l'immagine risulta decisamente più piatta; si osservi, ad esempio,
anche in questo caso la resa del muro in mattoni a vista e le pareti
intonacate. Questo metodo tuttavia consente una simulazione più
corretta dell'illuminazione complessiva della scena poiché è l’unico
che tiene conto della reale ripartizione spaziale dell’intensità
luminosa dell’apparecchio in scena (curve fotometriche). Negli altri
casi (scanline/raytracing e G.I.) è l’utente a definire la ripartizione
della radiazione luminosa della sorgente, imponendo un cono di
apertura del fascio luminoso. L’algoritmo radiosity tiene inoltre conto
dell’effettiva composizione spettrale della radiazione luminosa e
della sua influenza sulla resa dei colori delle superfici presenti nella
scena. Nel caso della G.I. questo calcolo viene effettuato in modo
analogo ma senza alcun riferimento alla composizione spettrale
della radiazione luminosa.
fig.8
Scena di prova, simulazione calcolata con algoritmo
scanline/raytracing, illuminazione artificiale
fig.9
Scena di prova, simulazione calcolata con algoritmo GI,
illuminazione artificiale
fig.10
Scena di prova, simulazione calcolata con algoritmo radiosity,
illuminazione artificiale
Tabella 1 caratteristiche delle immagini e tempi di calcolo
Immagine
Algoritmo di
calcolo
Risoluzione[3 Tempo di calcolo
00 dpi]
fig.2
Scanline/
Raytracing
2300x1725
pixel
15min:38sec
fig.3
G.I
2300x1725
pixel
3h:07min:25sec
fig.4
Radiosity
2300x1725
pixel
1h:20min:45sec
fig.5
Scanline/
Raytracing
2300x1725
pixel
13min:26sec
fig.6
G.I
2300x1725
pixel
1h:31min:17sec
fig.7
Radiosity
2300x1725
pixel
45min:56sec
fig.A
Scanline +G.I.
3000x2000
pixel
4h:21min:33sec
Conclusioni
Introducendo le varie tecniche di calcolo ci siamo chiesti quali
fossero i vantaggi e gli svantaggi presenti in ognuna di esse e se
fosse possibile utilizzare con profitto tecniche miste per trarre da
ciascuna di esse il meglio di quanto offrono in termini di qualità della
scena e tempi di calcolo. Come abbiamo visto è confermata
l’asserzione iniziale di questo articolo secondo cui la perfetta tecnica
di simulazione ancora non è disponibile nei software commerciali.
Ogni algoritmo presenta vantaggi e svantaggi, il trucco è nel riuscire
a sfruttare al meglio i vantaggi che ognuno è in grado di fornire.
L’immagine di apertura del presente articolo è una scena
sensibilmente più complessa di quella utilizzata come banco di
prova per i test. Le superfici hanno caratteristiche complesse e gli
algoritmi di calcolo sono applicati in modo tale da rendere al meglio
ogni aspetto. Per ottenere questo risultato è stata utilizzata una
tecnica mista G.I./scanline per ridurre drasticamente i tempi di
calcolo (4h:21min:33sec). La tecnica radiosity non è stata applicata
in quanto sono presenti superfici con materiali caratterizzati da
rugosità complesse: questi materiali possono essere riprodotti in
modo corretto solo con il binomio G.I./scanline. Inoltre non era
richiesta, nel caso specifico, una analisi illuminotecnica con
apparecchi a complessa ripartizione spaziale dell’intensità luminosa
e le sorgenti usate non introducono problemi sulla resa dei colori dei
materiali presenti in scena.
Il risultato è un’immagine fortemente d’effetto con una buona resa
realistica a fronte di un impegno di tempi di calcolo relativamente
modesto.
L’illuminazione di esterni
Nel presente articolo si affronta in modo analogo la situazione
dell’illuminazione di esterni.
Qual è il motivo che spinge ad analizzare questa situazione di
illuminazione separatamente dalla precedente?
La risposta sta nelle tecniche utilizzate per il calcolo
dell'illuminazione: alcune, già utilizzate negli interni, vengono
sfruttate in modo diverso negli esterni, altre sono invece
parzialmente o del tutto nuove e si utilizzano specificatamente nel
calcolo dell'illuminazione di esterni.
Da notare, come già fatto in precedenza, che la metodologia di
lavoro qui analizzata non considera i software scientifici di alto livello
in grado di fornire dati quantitativi esatti, ma costituisce un esempio
delle possibilità di rappresentazione tridimensionale, con software
commerciali, che, in fase di progettazione o per scopi di
comunicazione, i professionisti (architetti, designer, progettisti)
utilizzano frequentemente.
L’illuminazione degli esterni e le tecniche di simulazione.
Nella fig.11 si può vedere il modello utilizzato per il test: un edificio a
due piani con un contesto circostante (progetto arch. Renzo
Raimondi).
Il modello costituisce un classico esempio di scena in esterno e
verrà sottoposto, come nel caso degli interni già citato, a rendering
in condizioni di illuminazione naturale (caso diurno) e artificiale
(caso notturno).
Le tecniche per simulare l'illuminazione in esterni differiscono dal
caso degli interni poiché le condizioni ambientali al contorno in cui si
trovano ad essere gli oggetti nel caso di esterni o di interni sono
fortemente differenti, soprattutto per quanto riguarda il caso
dell’illuminazione naturale.
Infatti, mentre nel caso degli interni con luce solare si ha una
preponderanza di illuminazione indiretta e diffusa dagli oggetti
presenti in scena, nel caso di esterni si ha una preponderanza di
luce diretta proveniente dal sole e, soprattutto, proveniente dalla
diffusione del cielo.
fig.11
Modello utilizzato per il test
Ciò che quindi si deve replicare è proprio questa situazione,
schematicamente raffigurata in fig.12 in cui un gruppo di primitive
solide appoggiate su un piano viene illuminato da una sorgente a
raggi paralleli che simula il sole (A) e da una calotta semisferica che
simula la volta celeste (B).
fig.12
Schema di illuminazione per esterni
Nel caso, invece,dell’illuminazione artificiale di esterni, non è più
necessario tenere nella giusta considerazione i contributi delle interriflessioni delle superfici illuminate, come invece era di importanza
rilevante nel caso dell’illuminazione di interni. Infatti nel caso di
esterni il maggior contributo all’illuminazione proviene direttamente
dagli apparecchi di illuminazione presenti nella scena.
Gli algoritmi di simulazione utilizzati per simulare le condizioni di
illuminazione di esterni, come il caso della scena di test, sono i
seguenti:
scanline/raytracing
radiosity
global illumination
ambient occlusion
global illumination con HDRI
Le prime tre tecniche non verranno utilizzate nel calcolo della scena
di test poiché meno performanti delle ultime due che costituiscono
quindi i nuovi approcci al rendering di esterni e che rivoluzionano
metodi e tempi di lavorazione di una scena 3D.
L'Ambient Occlusion (AO) è una tecnica efficacissima che,
sfruttando il raytracing, proietta raggi da una calotta ipotetica (non
fisicamente presente in scena) allo scopo di colpire gli oggetti da
tutte le direzioni generando in questo modo penombre tanto più
realistiche quanti più sono i raggi emessi dal sistema (chiamati
samples). E’ una tecnica molto flessibile (con pochi raggi si genera
un disturbo nell'immagine ma si possono effettuare velocissime
prove di illuminazione in diverse condizioni) e potente che produce
solo luce diretta ma è facilmente integrabile, con una efficace
tecnica mista come accennato in, con altre sorgenti luminose.
La Global Illumination nel caso dell’illuminazione di esterni è
efficacemente integrata con le immagini HDRI (High Dynamic
Range Image) dell’ambiente circostante in cui il modello virtuale è
inserito, per ottenere i migliori risultati.
Le immagini HDRI sono il risultato dell'unione di diverse immagini
dello stesso soggetto, in questo caso il contesto, fotografato in
diverse condizioni di esposizione: la composizione di queste in una
sola immagine consente di salvare le informazioni di illuminazione
all'interno del file stesso.
La differenza tra un immagine tradizionale e una HDRI sta nel fatto
che nella prima il pixel assume un colore fisso compreso tra 0 e i
milioni di colori disponibili in funzione del numero di bit
dell’immagine: usualmente le immagini sono a 24 bit che
corrispondono a 16,8 106 colori, in alcuni casi si hanno immagini a
48 bit, per un totale di 2,8 1014 colori. Le immagini HDRI sono a 96
bit le informazioni contenute all’interno si ampliano in modo
esponenziale: 7,9 1028 valori per ogni singolo pixel!.
Il risultato finale di questa tecnica è dato da immagini ad alto
realismo in cui le componenti diretta, diffusa e speculare vengono
simulate con estrema semplicità con il solo utilizzo di un immagine
ambientale.
Il lato negativo risiede nei tempi di preparazione dell'immagine
panoramica , e nei tempi di calcolo del rendering finale.
Il test
Nella nostra prova applicheremo le due tecniche suddette
confronteremo tempi e risultati alla stessa scena di test di fig.11.
evidenzieranno le specifiche caratteristiche di ogni tecnica e
definiranno gli ambiti di applicazione specifici e i vantaggi
ciascuna.
e
Si
si
di
Il caso dell’illuminazione diurna
Nelle figg. 13 e 14 si possono osservare i risultati dell'applicazione
delle due tecniche ad una situazione di luce diurna.
fig.13
Illuminazione diurna con AO
fig.14
Illuminazione diurna con HDRI
I diversi tempi di calcolo (rispettivamente di 1h:15min per AO e
3h:27min per HDRI), dovuti al diverso tipo di metodo utilizzato (AO
non calcola la luce indiretta), dichiarano immediatamente il diverso
tipo di approccio alla simulazione che i due algoritmi possiedono.
Indubbiamente superiore come qualità, il metodo HDRI consente un
maggior controllo dell'illuminazione, ma diventa scarsamente pratico
in tutti quei casi (sempre molto frequenti) in cui la qualità assoluta si
deve parzialmente sacrificare in favore di tempi di produzione stretti.
L'AO si mostra quindi vincente in tutti quei casi in cui si richiede
rapidità di configurazione e calcolo: è sufficiente impostare un
corretto valore di “samples” ed ottenere in questo modo diverse
immagini di prova calcolate in poche manciate di secondi per poi
aumentare la definizione dei samples solo nelle immagini finali.
Il caso dell’illuminazione notturna
In questo caso il netto vantaggio dell'AO si esprime ancor meglio
poiché il contesto notturno in cui il modello virtuale è inserito non
produce grandi effetti sull’illuminazione artificiale dello stesso.
Quindi con la tecnica Global Illumination con immagini HDRI,
l'apporto di illuminazione dall’ambiente circostante, in particolare
dalla volta celeste, sostanzialmente buia e comunque priva di forti
contrasti, non restituisce risultati utili ed il lavoro di preparazione
dell'immagine ambientale non viene ripagato da un incremento
rilevante della qualità del risultato.
Nella preparazione di una scena notturna si deve ovviamente tenere
in considerazione l'introduzione di luci che simulano le sorgenti
artificiali presenti nella realtà.
Nella scena di test sono state utilizzate delle tradizionali sorgenti
virtuali di tipo spot e area light che opportunamente calibrate
forniscono la resa adeguata di lampioni, lampade da interni e altri
apparecchi tipici di una scena di questo tipo.
Il risultato dell'illuminazione dei due motori di resa dell'illuminazione
artificiale si può osservare nelle figg. 15 e 16 dove, rispettivamente,
AO e HDRI riportano risultati estremamente simili con tempi tuttavia
decisamente a favore di AO: 2h 43min per AO e 5h:07min per
HDRI.
Dalle prove effettuate si deduce una reale operatività dello
strumento di AO nel caso di illuminazione di esterni.
fig.15
Illuminazione notturna con Ambient Occlusion
fig.16
Illuminazione notturna con HDRI
Tabella 1 Caratteristiche delle immagini e tempi di calcolo
Immagine
Algoritmo di
calcolo
Risoluzione
[300 dpi]
Tempo di
calcolo
AO
1725 x 1078
pixel
1 h 15 min
Fig. 14
GI con HDRI
1726 x 1078
pixel
3 h 27 min
Fig. 15
AO
1725 x 1078
pixel
2 h 43 min
Fig. 16
GI con HDRI
1726 x 1078
pixel
5 h 07 min
Fig. 13
E’ importante sottolineare che solo la tecnica Radiosity consente di
considerare l’effettiva ripartizione spaziale dell’intensità luminosa
degli apparecchi presenti nella scena. Nel caso dell’illuminazione di
esterni, questa tecnica non viene utilizzata poiché praticamente non
esiste un ambiente ristretto di cui calcolare l’effettivo bilancio
energetico interno. Infatti nel caso notturno, l’apporto delle interriflessioni delle superfici presenti in scena è praticamente nullo e la
simulazione con le tecniche quivi descritte fornisce risultati
estremamente soddisfacenti.
Conclusioni
Il caso preso in esame ha evidenziato l’utilizzo di un metodo di
lavoro specifico del rendering di esterni in cui la scena è stata
ottimizzata al particolare scopo.
Vi sono tuttavia casi in cui i metodi esposti si applicano a scene di
interni riconducibili alla situazione degli esterni: il modello virtuale ha
dimensioni trascurabili rispetto all’ambiente circostante e/o alla
sorgente illuminante (caso illuminazione naturale in esterni).
Tipica è la situazione in cui un oggetto, contenuto all’interno di uno
spazio chiuso ha dimensioni relativamente piccole rispetto
all’ambiente che lo contiene: anche il caso dell’inserimento di un
oggetto virtuale appoggiato su un tavolo in una stanza reale, può
quindi essere efficacemente risolto con le tecniche esposte in
questa occasione.
Lo sfondo sarà costituito da un’immagine ambientale reale della
stanza e l’oggetto modellato virtualmente verrà illuminato, posto su
un tavolo, coerentemente con l’illuminazione dell’ambiente reale di
sfondo.
In fig. 17 si può osservare un caso tipico in cui gli oggetti sono stati
illuminati con l’utilizzo di Ambient Occlusion.
fig.8
Rendering di interni con Ambient Occlusion
Da aggiungere a questo punto un doveroso riferimento agli
strumenti utilizzati per questo test di resa.
Tutti i rendering del presente articolo sono stati realizzati con
Blender, uno strumento di modellazione, animazione e rendering
Open Source (quindi assolutamente gratuito, anche per utilizzo di
tipo commerciale) che si è dimostrato non solo affidabile ma anche
professionalmente operativo al pari di blasonati software che, oltre
ad essere estremamente costosi, risultano sempre più ridondanti e
pesanti dal punto di vista della gestione (oltre i 100 Mb di spazio
installato su disco).
Non ultimo il vantaggio di essere completo di tutte le funzioni
necessarie ad un software di questo tipo, tutte comprese in un file di
installazione di meno di 3Mbyte.
Sicurezza attiva e passiva in moto, simulazione di
dinamica ed eventi
L’aver affrontato un tema complesso come quello della sicurezza in
moto, è stato di stimolo per la progettazione vera e propria ma
soprattutto per la fase di impostazione del lavoro.
Se all’inizio del lavoro le idee, ma soprattutto i sogni, erano quelli di
riuscire a creare qualcosa di rivoluzionario, con lo svilupparsi della
ricerca, l’affinamento delle conoscenze ci ha portato a considerare
tutto il progetto in un’ottica più realistica.
Si è lavorato così in modo verosimile, totalmente estraneo agli
esercizi di stile tipici di carrozzieri e stilisti.
In testa alla lista esistevano dei problemi che, tradotti in esigenze,
hanno richiesto soluzioni.
Queste raramente passano attraverso il semplice esercizio al
tecnigrafo (o al computer) di tracciatura di forme a prescindere dalla
reale dinamica del caso.
Nel disegno industriale si deve tenere conto, molto di più che in
architettura, di tempi, costi, pesi, producibilità, diffusione sul mercato
e vendibilità.
Per questo si è prestata particolare attenzione alla semplicità e alla
possibilità di realizzazione con tecnologie già presenti sul mercato.
La soluzione adottata può valere per tutti gli scooter in commercio,
essendo questi ultimi molto simili tra loro nelle dimensioni, struttura
del telaio, distribuzione di pesi e volumi e soprattutto perché tutti
dotati di scudo anteriore.
Le poche ricerche fino ad ora condotte nel campo della “moto
sicura”, sono sempre state un riuso dei concetti propri della ricerca
automobilistica, e pertanto non specifiche. Come già puntualizzato,
la moto, non è l’auto, sotto nessun aspetto, e come tale va trattata a
parte, tenendo conto delle esigenze specifiche. I risultati ottenuti nel
campo automobilistico possono essere utili, ma non devono essere
il punto di partenza, né quello di arrivo, ma solo strumento di
ricerca.
La moto è un veicolo il cui mercato esiste grazie alla passione di chi
la usa.
E’ un mezzo di trasporto più disagevole dell’auto, ma nelle città dal
traffico sempre al limite del collasso per ingorghi e problemi di
parcheggio, è un mezzo di locomozione che vive ora una nuova
giovinezza. Sono in tanti ormai a pensare che i vantaggi siano
superiori ai disagi intrinseci delle due ruote, e che forse sia meglio
preoccuparsi di casco, guanti, una maglia in più, piuttosto che
passare la giornata prima fermi in coda, poi lottando, senza
esclusione di colpi, alla ricerca dell’ambito parcheggio.
Se questo non bastasse ancora, pensiamo all’ambiente: le auto in
genere, mediamente con una capienza di cinque posti, vengono
utilizzate dal solo conducente, occupano 5 volte lo spazio di uno
scooter, ed inquinano da 30 a 40 volte di più.
Dare un’immagine di maggior sicurezza a un mezzo di trasporto
simbolo del rischio per antonomasia, porterebbe forse ad evitare
che tanti diventino forzatamente utenti di un mezzo delle cui
dimensioni non necessitano effettivamente se non per l’idea che
“grosso è più sicuro”, rendendo meno congestionato il traffico in
città. Perché quello che interessa a tutti non è forse il raggiungere la
meta senza sforzo, velocemente, senza avere problemi di posteggio
e soprattutto in modo efficiente?
Ma qui siamo di nuovo sconfinati nei sogni dell’inizio... il progetto
presentato non cambierà il mondo dei trasporti, ma costituisce un
verosimile punto di partenza per ulteriori ricerche.
Un oggetto di produzione industriale ha, nella maggior parte dei
casi, dimensioni a misura d’uomo. La moto non viene meno a
questa regola.
L’utilizzo di uno scooter di produzione ha permesso di confrontarsi
direttamente con la realtà fisica delle parti.
E’ stato necessario intervenire direttamente sul mezzo per
verificare, purtroppo per ora solo staticamente, ingombri, percentili,
e interferenze reciproche dei vari elementi.
Legno, poliuretano espanso, stucco, colla vinilica, vernici all’acqua,
sono stati strumenti che hanno consentito la modellazione reale in
scala al vero, con ricadute progettuali importantissime.
Una volta realizzato il modello, però, restava un’incognita: il suo
comportamento dinamico. Avrebbe funzionato o no? La risposta a
questo quesito sarebbe venuta da una sperimentazione sul campo
troppo costosa.
Di conseguenza è stato simulato virtualmente il comportamento in
caso di urto.
L’utilizzo del computer ha consentito di verificare le ipotesi,
visualizzando attraverso animazioni, la sequenza di impatto, sia nel
caso normale, che nel caso con la protezione passiva dello scivolo.
Il computer è stato perciò uno strumento fondamentale per la
verifica delle ipotesi progettuali.
La piattaforma hardware utilizzata è stata un Personal Computer
basato su processore Intel Pentium (180 MHz di cpu clock) con 64
Mb di RAM e scheda grafica Matrox Millenium (4 Mb di Wram). Con
software Autodesk 3D Studio 4, 3D Studio Max e AutoCAD r12,
sulla base del rilievo dimensionale dello scooter Skipper, sono state
realizzate sia la modellazione tridimensionale che le prove
dinamiche dell’intero contesto progettuale. E’ stato pertanto
verificato il comportamento e la funzionalità dell’oggetto con costi
decisamente più contenuti della realizzazione di prove di crash.
Prove che possono essere realizzate solo dalle grandi industrie con
investimenti molto elevati.
BIBLIOGRAFIA
•
F. Valpreda, Le tecniche di simulazione digitale per la
comunicazione del progetto, Luce n.2 anno 2004]
•
Antonio A. Bianco, Blender 2.32, Computer Grafica, Tecniche
e Applicazioni n°35 aprile 2004
•
Ton Roosendaal e aa., The Official Blender 2.3 Guide
•
V. Mazza, Architettura virtuale – Chiostro 3D Professional n°5
dic 2000/gen 2001
•
S. Testoni, Rappresentazione ed analisi del modello digitale
in architettura 3D Professional n°7 apr/mag 2002
•
A. Rinaldi, Tecniche d'illuminazione 3D Professional n°9 dic
2003/gen 2004
•
J. Birn, Digital Lighting & Rendering New Riders, 2000
•
M. Derwyn, M. Harrison, M. Blaisdell, Motorcycle collision
experiments
SAE papers 700897
•
K. Langwieder, Collision characteristics and injuries to
motorcyclists and moped drivers
SAE papers 770920
•
P. M. Watson, Features of the experimental safety motorcycle
SAE papers 796010
•
A. Searle, J. A. Searle, The trajectories of pedestrian,
motorcycles, motorcyclists, etc., following a road
accident
SAE papers 831622
•
F. B. Cassan, J. C. Vincent, A. Fayon, C. Tarriere, Investigation
of a series of representative experimental collisions
between automobiles and two wheeled vehicles, with
specific analysis of severity of head impacts
IRCOBI 1984
•
J. Grandel, D. Shaper, Impact dynamic, head impact severity
and helmet’s energy absorption in
motorcycle/passenger car accident tests
IRCOBI 1984
•
K. D. Kulby, C. R. Buse, Motorcycle post-accident inspection
techniques
SAE papers 850064
•
J. Grandel, D. Shaper, Motorcycle collision with passenger
cars. Analysis of impact mechanism, kinematics, and
effectiveness, of full face safety helmets
SAE papers 850094
•
B. P. Chinn, P. Hopes, M. A. Macaulay, Leg protection for
riders of motorcycles
SAE 856121
•
M. Danner, K. Langwieder, A. Sporner, Accident of
motorcyclists. Increase of safety by technical measures
on the basis of knowledge derived from real-life
accidents
SAE papers 856123
•
H. Takodoro, S. Fukuda, K. Miyazaki, A study of motorcycles
leg protection
SAE 856126
•
G. L. Donne, P. D. Hopes, Motorcycle rider protection in
frontal impacts
SAE 856128
•
J. V. Ouellet, H. H. Hurt, D. R. Thom, Collision performances
of contemporary crashbars and motorcycle riders leg
injuries
SAE 870603
•
G. Bocchi, La simulazione al computer del comportamento
dinamico del telaio motociclistico
in Moto Tecnica, anno 2, n° 1, aprile 1988
•
S. Colombo, Una struttura ben calcolata è tutta salute
in Moto Tecnica, anno 2, n° 2, maggio 1988
•
M. Riccardi, BMW, la moto pensa alla sicurezza
in Motociclismo, anno 79, n°11, novembre 1992
•
F. Fazi, Stile e produzione di massa. L’esperienza Piaggio
in Moto Tecnica, anno 6, n° 12, dicembre 1992
•
F. Fazi, Sicurezza passiva anno zero
in Moto Tecnica, anno 7, n° 1, gennaio 1993
•
P. Beducci, Dossier: l’industria della motocicletta
in Tecnologie Meccaniche, anno 27, n° 1, gennaio 1996
Alcuni siti web di riferimento
www.blender.org
www.blender3d.org
www.elysiun.com
www.3dtotal.com
www.cgchannel.com


![Musica_e_immagine.pps [modalità compatibilità]](http://s1.studylibit.com/store/data/007566322_1-58d70b56b536a079f8882415348ab4fa-300x300.png)