Università degli Studi di Pisa
Facoltà di Ingegneria
Corso di Laurea Specialistica in Ingegneria Elettronica
Tesi di Laurea Specialistica
Studio di fattibilità di un sistema di
controllo per organi meccanici in
rotazione
Relatori:
Prof. Pierangelo Terreni _________________________
Prof. Paola Forte
_________________________
Candidato:
Rocco Antonio Zupa
_________________________
Anno Accademico 2006-2007
Sommario.
Sommario................................................ 2
Introduzione............................................ 8
Il Banco................................................. 10
1.1 Il CRTM......................................................10
1.2 ADP-BPI.....................................................10
1.2.1 Struttura e Funzionamento. ................................. 11
1.2.2 Scatola ingranaggi di prova.................................. 15
1.2.3 Albero torsiometrico. ............................................ 16
1.2.4 Termocoppie. ......................................................... 17
1.2.5 Accelerometri e pick-up. ....................................... 17
1.2.6 Sensorizzazione circuiti di lubrificazione. ........... 18
1.2.7 Schede tecniche. ..................................................... 19
1.2.8 Dispositivi nella catena di acquisizione................ 20
1.3 Il sistema di controllo e comando ed il
sistema di acquisizione.....................................22
1.3.1 Il PC di controllo e comando. ............................... 22
1.3.2 La catena di interazione........................................ 23
1.3.3 La catena di controllo e comando. ....................... 23
1.3.4 Il PC di acquisizione.............................................. 23
1.3.5 La catena di acquisizione. ..................................... 23
1.3.6 Il Nuovo Sistema di acquisizione.......................... 24
1.3.7 Il PC di monitoraggio del lubrificante................. 24
1.3.8 Schede tecniche. ..................................................... 25
1.4 I provini. .....................................................31
La Coppia.............................................. 32
2.1 Un nuovo sistema per il rilevamento della
coppia.................................................................32
2.2 Sistemi di rilevamento per motori
Turboelica.........................................................33
2.2.1 Rilevatore idromeccanico. .................................... 34
2.2.2 Rilevatore elettronico. ........................................... 35
2.2.3 Bibliografia............................................................. 36
2.3 Fattibilità......................................................37
2.3.1 I principi di funzionamento. ................................. 37
2.4 Analisi dei segnali. .....................................39
2.4.1 Analisi nel dominio della frequenza..................... 40
2.4.1.1 Teorema del Ritardo..................................................... 40
2.4.1.2 Effetto sugli Spettri di Ampiezza e Fase. .................... 41
2.4.1.3 Effetto della posizione iniziale...................................... 41
2.4.1.4 Effetto dell’applicazione di una coppia negativa. ...... 43
2.4.1.5 Effetto del sampling multiplexato................................ 45
2.4.1.6 Simulazioni mediante analisi in frequenza................. 46
2.4.1.7 Problematiche e miglioramenti.................................... 46
2.4.2 Analisi nel dominio del tempo. ............................. 47
2.4.2.1 Misura del ritardo......................................................... 47
2.4.2.2 Andamenti non identici. ............................................... 47
2.4.2.3 Wandering della linea base. ......................................... 47
2.4.2.4 Assenza di punti angolosi. ............................................ 48
2.4.2.5 Dipendenza dell’andamento dall’RPM....................... 48
2.4.2.6 Aree di sovrapposizione................................................ 48
2.4.2.7 Simulazioni mediante analisi nel dominio del tempo.48
2.4.2.8 Problematiche e miglioramenti.................................... 51
L’Apparato Sperimentale. .................... 52
3.1 La Torsione.................................................52
3.2 I Sensori......................................................54
3.2.1 Pickup a Riluttanza MagneticaVariabile. ........... 54
3.2.1.1 Principi di funzionamento. ........................................... 54
3.2.1.2 Indicazioni per l’impiego.............................................. 55
3.2.1.3 Scelta del sensore........................................................... 55
3.2.1.4 Scelta del pole-tip. ......................................................... 56
3.2.2 Bibliografia............................................................. 57
3.3 Il condizionamento.....................................58
3.3.1 Partitore resistivo. ................................................. 58
3.3.1.1 Dimensionamento delle resistenze. .............................. 59
3.3.1.2 Scelta dei diodi Zener. .................................................. 61
3.3.2 Lo squadratore. ..................................................... 62
3.4 Prove Sperimentali. ....................................64
3.4.1 Effetti del Condizionamento................................. 64
3.4.2 Risultati. ................................................................. 65
3.4.3 Problematiche e miglioramenti ............................ 66
Asset di prova alternativi. ..................... 67
4.1 Il primo asset di prova...................................67
4.1.1 I principi di funzionamento. ................................. 67
4.1.2 Il Trigger di Schmitt.............................................. 68
4.1.2.1 SN74HC14N: Specifiche. .............................................. 68
4.1.2.2 Bibliografia. ................................................................... 70
4.1.3 Prove sperimentali................................................. 71
4.1.4 Problematiche e miglioramenti. ........................... 71
4.2 Il secondo asset di prova. ..............................73
4.2.1 I principi di funzionamento. ................................. 73
4.2.2 Prove sperimentali................................................. 73
4.2.3 Problematiche e miglioramenti. ........................... 75
Prospettive............................................. 76
5.1 La sensoristica del banco..............................76
5.2 Wireless Passive Saw Sensors....................77
5.2.1 Introduzione........................................................... 77
5.2.2 Principio di funzionamento. ................................. 78
5.2.3 Applicazioni. .......................................................... 81
5.2.3.1 Sistemi di identificazione (fixed coded SAW ID tags).
..................................................................................................... 81
5.2.3.2 Sensori di temperatura. ................................................ 81
5.2.3.3 Sensori di pressione, accelerazione.............................. 82
5.2.3.4 Sensori di coppia. .......................................................... 83
5.2.3.5 Risoluzioni tipiche. ........................................................ 85
5.2.4 Bibliografia............................................................. 86
5.3 Il Torsiometro Alternativo. ........................88
5.3.1 I riferimenti............................................................ 90
5.3.2 I sensori. ................................................................. 90
5.3.2.1 Trasduttori magnetici ad uscita analogica. ................ 91
5.3.2.2 Trasduttori magnetici ad uscita digitale. .................... 92
5.3.2.3 Trasduttori ad effetto Hall ad uscita digitale. ............ 93
5.3.2.4 Confronto. ...................................................................... 94
5.3.2.5 Bibliografia. ................................................................... 94
5.3.3 Il circuito squadratore. ......................................... 95
5.3.4 Il campionamento. ................................................. 95
5.3.5 Il simulatore LabVIEW. ....................................... 96
5.3.6 Il Real Time Engine per il “Torsiometro
Alternativo”. ................................................................... 97
5.3.6.1 Il VI Trigger di Schmitt................................................ 97
5.3.6.2 Il VI Pulse Detector....................................................... 98
5.3.6.3 Il Motore di Calcolo. ..................................................... 98
5.4 Sistema Stand Alone...................................99
5.4.1 Hardware. .............................................................. 99
5.4.2 Il firmware. .......................................................... 100
5.4.2.1 INT_EXT0. .................................................................. 100
5.4.2.2 INT_EXT1. .................................................................. 101
5.4.3 L’interfaccia utente. ............................................ 101
Appendici. ........................................... 102
Segnali Analogici: masse e disturbi... 103
A.1 Segnali e Sistemi di Misura.....................103
A.1.1 Grounded or Ground-Referenced Signal Source.
........................................................................................ 103
A.1.2 Ungrounded or Nonreferenced (Floating) Signal
Source. ........................................................................... 104
A.1.3 Differential or Nonreferenced Measurement
System............................................................................ 104
A.1.4 Grounded or Ground-Referenced Measurement
System............................................................................ 106
A.2 Schemi per una corretta acquisizioni di
segnali analogici.............................................106
A.2.1 Acquisizioni da Grounded Signal Source. ........ 106
A.2.2 Acquisizioni da Floating (Nonreferenced) Source.
........................................................................................ 108
A.2.3 Tavola Sinottica. ................................................. 110
A.3 Rumore dovuto ad accoppiamenti...........111
A.3.1 Minimizzare il Noise Coupling nelle
interconnessioni. ........................................................... 111
A.3.2 Accoppiamenti di tipo conduttivo. .................... 112
A.3.3 Modellazione di accoppiamenti di tipo capacitivo
ed induttivo. .................................................................. 113
A.3.4 Accoppiamenti di tipo capacitivo. ..................... 113
A.3.5 Accoppiamenti di tipo induttivo. ....................... 114
A.3.6 Accoppiamenti di tipo radiativo. ....................... 116
A.3.7 Miscellaneous Noise Sources.............................. 117
A.4 Setup.........................................................117
A.4.1 Sistemi Bilanciati. ............................................... 117
A.4.2 Sorgenti e impedenze.......................................... 119
A.4.3 Rumore e setup. .................................................. 119
A.4.4 Rumore e signal processing. .............................. 121
A.5 Bibliografia. .............................................122
Analisi nel Dominio di Fourier e
Campionamento.................................. 123
B.1 Trasformata Continua di Fourier...........123
B.2 Trasformata di Fourier di una sequenza.
.........................................................................123
B.3 Trasformata Discreta di Fourier. ...........124
B.4 Relazioni. .................................................124
B.5 Tavola sinottica........................................125
B.6 Bibliografia. .............................................125
Caratterizzazione
del
circuito
squadratore. ........................................ 126
C.1 Condizioni di prova. ................................126
C.2 Primo stadio. ............................................126
C.3 Secondo stadio. ........................................129
Conclusioni. ........................................ 130
Introduzione
8
Introduzione.
La tesi scaturisce dalla collaborazione tra il DMNP (Dipartimento di
Ingegneria Meccanica, Nucleare e della Produzione) ed il Dip. IET
(Dipartimento di
Ingegneria Informatica, Elettronica e delle
Telecomunicazioni) dell’Università di Pisa. Le attività di tesi sono state
svolte presso il Centro Ricerca sulle Trasmissioni Meccaniche a
tecnologia avanzata, nato dalla collaborazione tra il DMNP e Avio.
Presso tale centro sono installati due banchi prova per sottoporre
ingranaggi di tipo aeronautico a prove di tipo limite di fatica, pitting,
scuffing. Il lavoro di tesi si è articolato in diverse attività incentrate sulla
sensoristica, i sistemi di condizionamento, di acquisizione e
l’elaborazione dei dati per il banco “Renk”.
Prima attività è stato l’adeguamento di un applicativo LabVIEW per
l’acquisizione, il ricampionamento e la media sincrona on line dei dati
prodotti dalla sensori. E’ stato poi realizzato un VI per un’analisi off-line
complessiva dei dati di più prove (indicatori NASA, firme vibratorie,
colormap).
Il sensori ed il sistema di acquisizione sono stati revisionati ed
aggiornati, sono stati rieseguiti i cablaggi ed eliminate alcune criticità. A
tal fine è stata prestata la massima attenzione al collegamento delle
masse (field wiring) ed adottati accorgimenti per limitare i disturbi
(EMI).
Si è proceduto, poi, allo sviluppo di un sistema alternativo per il
rilevamento della coppia: misurando lo sfasamento di due ruote dentate
all’estremità di un albero è possibile valutarne la torsione, quindi la
coppia applicata. Il banco è del tipo a ricircolo di potenza, quindi, sono
stati effettuati test su tratti diversi della catena cinematica per valutare
quale fosse il più idoneo allo scopo. E’ stato realizzato un VI per
effettuare le simulazioni implementando, per ciascuna prova, un
algoritmo specifico.
Introduzione
9
E’ quest’ultima attività a dare il titolo alla tesi e ne rappresenta la parte
più corposa. Delle altre attività rimane traccia nel capitolo descrittivo del
banco e nell’appendice dedicata alle masse e disturbi.
Cap. 1 – Il Banco
10
1.
Il Banco.
1.1 Il CRTM.
Presso il Laboratorio “Scalbatraio”, situato nella pineta di Tombolo (Pi),
è ospitato il CRTM - Centro Ricerca sulle Trasmissioni Meccaniche a
tecnologia avanzata.
Frutto di una collaborazione tra il DIMNP - Dipartimento di Ingegneria
Meccanica, Nucleare e della Produzione e Avio, le attività del centro si
concentrano su due grandi tematiche: lo sviluppo di ingranaggi di tipo
innovativo ad altissime prestazioni e lo studio di avanzate metodologie
di lubrificazione.
Nell’ambito della caratterizzazione sperimentale degli ingranaggi, tesa
all’individuazione, mediante estese campagne sperimentali, dei limiti di
impiego estremi concessi dall’uso di nuovi materiali, nuovi lubrificanti e
nuove tecnologie costruttive, messe a punto da Avio, è istallato un Banco
Prova Ingranaggi a ricircolo di potenza.
1.2 ADP-BPI.
La RENK AG ha sviluppato e realizzato per Avio ”l’Attrezzatura Di
Prova per il Banco Prova Ingranaggi (ADP-BPI)”.
L’attrezzatura di prova (ADC-BPI) rappresenta la componente principale
del banco prova ingranaggi completo ed è stata progettata per sottoporre
gli ingranaggi a prove di fatica, in particolare:
- limite di fatica
- vaiolatura (pitting)
- scalfittura (scuffing)
Le prove di fatica possono essere eseguite a diverse velocità di rotazione
e livelli di carico.
Cap. 1 – Il Banco
11
1.2.1 Struttura e Funzionamento.
L’attrezzatura di prova (ADP-BPI) è costituita fondamentalmente da una
catena cinematica chiusa azionata dal motore dell’unità di azionamento.
La catena cinematica viene chiusa dalla scatola ingranaggi di prova (test
gearbox), nel quale è integrato l’alloggiamento dei provini, e dal
moltiplicatore.
Cap. 1 – Il Banco
12
Come unità di azionamento viene utilizzato un motore asincrono trifase
pilotato da un inverter vettoriale ad orientamento di campo (convertitore
di frequenza). Il motore, specifico per l’impiego su banchi prova, è
raffreddato ad aria, progettato per entrambe le direzioni di moto e coppia
e dotato di encoder tachimetrico. L’inverter assolve alle funzioni di
regolazione, comando e alimentazione del motore, in particolare
consente di leggerne e modificarne la velocità di rotazione dalla quale,
essendo noto il rapporto di trasmissione del moltiplicatore (39:119), è
possibile risalire alla velocità rotazionale degli ingranaggi in prova.
Cap. 1 – Il Banco
13
Un giunto cardanico, dotato
di un compensatore di
lunghezza, unisce il motore
AC al moltiplicatore di
banco (slave-gearbox). Una
rondella elastica integrata
assorbe le vibrazioni del
motore AC verso il
moltiplicatore e la scatola
ingranaggi di prova. Il
giunto rotante è protetto da
un carter.
(Nota: verrà sostituito con
un doppio giunto cardanico
che assicura assenza di
fluttuazioni
nella
trasmissione
del
moto
rotatorio).
Il
moltiplicatore
si
compone di ingranaggi a
dentatura elicoidale (Z39,
Z119). Al fine di ottenere
una lubrificazione mirata,
sono stati predisposti dei
getti d’olio.
Cap. 1 – Il Banco
14
Il collegamento tra il moltiplicatore di banco e la scatola ingranaggi di
prova è realizzato per mezzo di alberi di connessione con giunti a
lamelle d’acciaio che consentono la compensazione degli spostamenti
radiali, assiali e angolari inevitabili durante il funzionamento. Vengono
raffreddati tramite il raffreddamento ad acqua del loro carter di
protezione.
In uno degli alberi di connessione è integrato un albero torsiometrico che
consente di rilevare, in telemetria, le coppie statiche e dinamiche in
prossimità dell’albero rotante.
Il servomotore dell’unità attuatore elettromeccanico, agendo sulla vite
senza fine integrata, comanda uno spostamento assiale definito di
ingranaggi (Z119) a dentatura elicoidale all’interno del moltiplicatore
generando, nella catena cinematica, la coppia di carico richiesta per
sollecitare il provino.
Cap. 1 – Il Banco
15
Il servoazionamento AC, comandato dal servoamplificatore, assicura un
posizionamento di precisione. Sulla vite senza fine sono montati due
finecorsa meccanici di sicurezza: questi, collegati al servoamplificatore,
effettuano il monitoraggio del punto di battuta finale a destra e a sinistra
dell’ingranaggio movibile assialmente nel moltiplicatore.
L’attrezzatura di prova (ADP-BPI) è stata dimensionata per consentire il
superamento senza danni di eventuali sovraccarichi (ad es. in caso di
rottura del campione di prova) pari al massimo a 4 volte le condizioni
d’esercizio.
La protezione contro i
sovraccarichi è garantita da
un giunto con perno a rottura
prestabilita posto tra gli
ingranaggi elicoidali spostati
assialmente del moltiplicatore
e la vite senza fine dell’unità
di attuazione. La rottura è
programmata per carichi
compresi tra 500 e 1000 N.
Le diverse unità costituenti il banco prova sono alloggiate su di un telaio
di base nel quale è integrato il serbatoio dell’olio per la lubrificazione dei
cuscinetti.
1.2.2 Scatola ingranaggi di prova.
Negli alloggiamenti ricavati nella scatola ingranaggi di prova viene
montato il set di provini (Z80) composto dal provino 1 (ingranaggio 1) e
dal provino 2 (ingranaggio 2).
Ciascun ingranaggio viene avvitato
su una flangia di alloggiamento.
Gli ingranaggi in prova vengono
lubrificati. I circuiti d’alimentazione
dell’olio dei provini e dei cuscinetti
sono
indipendenti.
Opportuni
accorgimenti
escludono
la
possibilità di mescolamenti.
Cap. 1 – Il Banco
16
1.2.3 Albero torsiometrico.
Per il rilevamento della coppia, all’interno
di una frizione a dischi è stato integrato un
albero torsiometrico, realizzato con
estensimetri estremamente precisi. Un
amplificatore
di
misura
integrato
nell’albero torsiometrico fornisce tensione
costante al ponte di misura DMS ed
amplifica il segnale della coppia torcente.
Il segnale analogico di misura viene
amplificato e modulato alle alte frequenze.
La trasmissione del segnale della coppia
torcente e dell’energia di alimentazione avviene senza contatto. In questo
modo non vi sono possibilità di usura e non è necessaria alcuna
manutenzione. La trasmissione del segnale di misura avviene in modo
induttivo. L’antenna ricevente stazionaria (pickup) serve come elemento
di accoppiamento tra l’unità di elaborazione e l’albero torsiometrico. Il
segnale digitalizzato della coppia torcente viene convertito all’interno
dell’unità di elaborazione in un segnale d’uscita analogico da 0 a +/-10
Volt.
In figura, il torsiometro montato su un tornio per un test. In rosso, il
pickup.
Cap. 1 – Il Banco
17
1.2.4 Termocoppie.
Per il monitoraggio della temperatura dei cuscinetti e dell’albero
torsiometrico, nell’attrezzatura di prova (ADP-BPI) sono stati integrati
17 elementi termosensibili (NiCr-Ni), innestati ed avvitati mediante
opportuni raccordi (T1..T17).
1.2.5 Accelerometri e pick-up.
Per il rilevamento delle vibrazioni dei cuscinetti sulla scatola ingranaggi
di prova, sulle flange 1 e 2 della sede di alloggiameno dei provini, sono
predisposti rispettivamente due accelerometri.
Cap. 1 – Il Banco
18
Sulla slave-gearbox sono montati un
accelerometro tri-assiale ed uno
mobile per il monitoraggio delle
vibrazioni del banco e della loro
distribuzione spaziale.
Gli alberi cavi su cui le Z39 sono
calettate montano, all’estremità verso
il motore, dei tappi avvitati con 6 viti a
testa
esagonale.
Due
pickup,
“leggendo” il passaggio delle teste
delle viti, forniscono segnali di
sincronismo rispetto ai due provini.
1.2.6 Sensorizzazione circuiti di lubrificazione.
Il circuito di lubrificazione degli ausiliari prevede:
- Un pressostato per il monitoraggio della pressione all’interno delle
tubazioni che portano l’olio ai cuscinetti relativi alla “test gbx”;
- Un pressostato ed una termocoppia per la misura della pressione e
della temperatura dell’olio di alimentazione della sezione dei
meccanismi di banco “slave gbx”;
- Un interruttore di livello ed un termostato per il monitoraggio del
livello e della temperatura dell’olio contenuto nel serbatoio.
Il circuito di lubrificazione degli ingranaggi campione:
- Un flussometro ed un pressostato per il controllo della portata e
della pressione dell’olio d’alimentazione degli ingranaggi
campione e due termocoppie per la misura delle temperature
d’ingresso e d’uscita dell’olio;
- Un sensore per il controllo di eventuali particelle derivanti dal
danneggiamento delle ruote: ODM (Oil Debris Monitoring)
- Un tappo magnetico a valle del sensore per il prelievo di campioni
di tali particelle.
Cap. 1 – Il Banco
19
1.2.7 Schede tecniche.
Attrezzatura di prova (ADP_BPI)
Rendimento delle parti rotanti
>95%
Motore AC dell’unità di azionamento
Potenza
Velocità di rotazione
56 kW
0 - 6000 giri/min
Moltiplicatore (slave-gbx)
Velocità di rotazione (input)
Velocità di rotazione (output)
Rapporto di trasmissione
0 - 6000 giri/min
5000 - 18000 giri/min
39 : 119
Velocità di rotazione (input)
Coppia
Potenza massima
Velocità tangenziale
Interasse
5000 - 18000 giri/min
200 - 500 Nm
940 kW
135 m/sec
140 mm
Scatola ingranaggi di prova
Lubrificazione cuscinetti
Temperatura (Input)
Pressione (Input)
Lubrificazione degli ingranaggi in prova
Temperatura (Input)
Temperatura temporanea (Input)
Flangia torsiometrica, unità di valutazione
Coppia nominale
Flangia torsiometrica, unità di elaborazione
Tensione d’uscita
Larghezza di banda
Impostazione punto di zero
Termocoppie, NiCr - Ni
Elemento termosensibile
Tipo
secondo
Diametro involucro
Lunghezza elemento termosensibile
Materiale dell’involucro
Note: yellow cable for K-type
max. 60° C
4 bar
50° - 150° C
max. 180° C
0 .. ±500 Nm
0 .. ±10 Volt
0 .. 1 KHz
±15 %
NiCr - Ni
K
DIN IEC 584
3,0 mm
250 mm
Inconel
Cap. 1 – Il Banco
20
1.2.8 Dispositivi nella catena di acquisizione.
Accelerometro Isotron Endewco monoassiale 7259A-10
Corrente di eccitazione
4 mA
Banda passante
~50000 Hz
s/n
DM69
DM67
DM45
Sensibilità [mV/g] @ 10g, 100 Hz
9.898
10.53
10.90
Channel
Note:
1
2
3
Accelerometro B&K 4321 triassiale
Tipo
in carica
s/n
867103
Sensibilità
9.8±2%[pC/g]
Asse
X
Y
Banda passante (Hz)
8700 - 12000 8700 - 12000
Channel
Note:
5
Accelerometro B&K 4369 monoassiale
Tipo
Banda passante
s/n
Sensibilità
8
DM71
10.15
4
Z
10000
11
in carica
8700 - 12000 Hz
1165208
21.1 [pC/g]
Channel
10
Note: Accelerometro mobile vincolato alla superficie tramite base magnetica;
sensibilità forzata a 32 [pC/g] su condizionatore “Kistler charge amplifier type
5001” per ottenere la corretta calibrazione @ 1g, 80Hz
Inverter vettoriale ad orientamento di campo
Channel
7
Note: segnale tachimetrico proporzionale in tensione continua
Flangia torsiometrica, unità di elaborazione
Channel
Note:
6
Cap. 1 – Il Banco
Pick-up
Tensione
21
~120Vpp @ 18000 giri/min
Channel
5
11
Note: Sono canali condivisi con l’accelerometro triassiale. Il campionamento
dei pick-up esclude il campionamento degli assi X, Z dell’accelerometro
Microfono Rion UC – 53 A
Capacità
Banda passante
s/n
Sensibilità
12.3 pF
20 - 20000 Hz
31297
58.8 [mV/Pa]
Channel
12
Note: La strumentazione comprende: capsula microfonica, preamplificatore,
cavi schermati e alimentatore a batteria 9V
Cap. 1 – Il Banco
22
1.3 Il sistema di controllo e comando ed il sistema
di acquisizione.
Due PC presiedono al funzionamento del banco:
- sul primo è attivo il programma di controllo e comando del banco;
- sul secondo è attivo il programma di acquisizione.
1.3.1 Il PC di controllo e comando.
Provvede a gestire i segnali di controllo (in) e comando (out) relativi a
velocità e coppia (segnali analogici, proporzionali), acquisisce le
temperature, portate e pressioni, (segnali acquisibili a bassa frequenza,
all’incirca ogni 1,5 sec), infine gestisce gli allarmi.
Un allarme comporta l’attivazione della procedura di arresto banco che
prevede una discesa opportunamente rapida e contemporanea di velocità
e coppia. Tale condizione di allarme si verifica se una delle grandezze
acquisite supera una soglia stabilita, purchè il relativo flag sia attivato.
Le schede di comando e d’acquisizione installate sono:
- NI PCI 6071E, collegata alla SCB-100;
- NI PCI 6713, collegata ad una delle SCB-68;
- NI PCI MIO 16E4, collegata allo SCXI-1000.
Cap. 1 – Il Banco
23
1.3.2 La catena di interazione.
Sono presenti altri due segnali “digitali” di allarme, anch’essi dotati di
flag di abilitazione, attivabili da dispositivi esterni, nel caso, dal PC di
acquisizione. In particolare, il secondo consente la sincronizzazione dei
due programmi: posto uguale ad 1 all’avvio del software di acquisizione,
viene, dallo stesso, riportato a 0 dopo pochi secondi.
1.3.3 La catena di controllo e comando.
Il filtraggio del segnale di coppia, proveniente dal torsiometro, serve a
fornire al programma di controllo e comando un segnale il più stabile
possibile. Viene utilizzato il canale 2 di un filtro (condiviso con la catena
di acquisizione) anti-aliasing KEMO 0.01 Hz – 100 kHz Dual Variable
filter type VBF/8 impostato sulla freq. di LP a 0.5 Hz. Le termocoppie
arrivano ad un modulo di condizionameto NI SCXI 1303 inserito in un
NI SCXI 1000. Gli altri segnali convergono ai connector block NI SCB68 ed NI SCB-100.
1.3.4 Il PC di acquisizione.
Provvede ad acquisire i segnali accelerometrici, microfonico e di
riferimeto dei pick-up (segnali acquisibili ad alta frequenza) oltre che
velocità e coppia. Alla generazione degli allarmi concorrono i 4
accelerometri della test-gearbox, l’asse Y del triassiale ed il segnale
proveniente dal torsiometro.
La scheda di acquisizione è una NI DAQ PCI MIO 16E1 da 1,2
Msample multiplexata collegata ad una delle due SCB-68.
1.3.5 La catena di acquisizione.
I segnali accelerometrici arrivano ai condizionatori, questi provvedono a
trasformare, oltre che amplificare, il particolare segnale elettrico
dell’accelerometro in una tensione proporzionale all’accelerazione
misurata. Tale proporzionalità è realizzata secondo una scala
selezionabile (attualmente impostata a 50 mV/g, ritenuta sufficiente ad
evitare saturazioni durante particolari condizioni di funzionamento). I
condizionatori adottati sono 3, del tipo ENDEVCO Charge & Isotron
Signal Conditioner Model 133, ciascuno ha 3 canali ed incorpora un
filtro passabasso a 50 kHz.
Cap. 1 – Il Banco
24
Si noti che gli accelerometri collegati ai tre canali del condizionatore
debbono essere dello stesso tipo (in carica o Isotron). Ecco perchè del
secondo condizionatore è sfruttato un solo canale.
La frequenza di campionamento è attualmente 50 kHz, quindi la
frequenza di taglio dei filtri è stata impostata a poco meno della metà (23
kHz). Tali filtri servono comunque anche ad eliminare la frequenza di
risonanza degli accelerometri (~90 kHz) per evitare saturazioni. I primi
due filtri sono del tipo master/slave, le proprietà del secondo filtro
(slave) sono selezionabili solo dal primo (master): si tratta di due KEMO
Dual Variable filter TYPE VBF 42M, che elaborano, a valle dei
condizionatori, i segnali provenienti dai quattro accelerometri
monoassiali della test-gearbox.
Del terzo filtro, condiviso con la catena di controllo, si sfrutta il primo
canale: la relativa frequenza di taglio è anch’essa impostata a 23 kHz e
gestisce il segnale, già condizionato, dell’asse Y dell’accelerometro
triassiale.
Il quarto filtro KRON-HITE model 3322R filter a 2 canali che dovrebbe
processare i segnali relativi agli assi X e Z dell’accelerometro triassiale
non è attualmente in uso.
I segnali successivamente convergono ai connector block NI SCB-68 ed
NI SCB-100.
1.3.6 Il Nuovo Sistema di acquisizione.
Affianca il PC di acquisizione, condividendone i segnali accelerometrici,
dei pick-up, di velocità e coppia. Attualmente è dedicato alla sola
elaborazione dei segnali, dopo averne effettuato un ricampionamento
sincrono on-line. I segnali, condizionati e filtrati secondo le modalità
descritte nei paragrafi precedenti, convergono ai terminal block NI TB2705 di due schede NI PXI-6120 inserite in uno Chassis NI PXI-1042
collegato al PC tramite un kit MXI-4 del tipo NI PXI-PCI8336.
1.3.7 Il PC di monitoraggio del lubrificante.
Un ulteriore PC è dedicato alla gestione dell’ODM, collegato
direttamente alla porta seriale.
Cap. 1 – Il Banco
25
1.3.8 Schede tecniche.
NI SCB-68
Analog Input (Number of channels)
68-pin Daq devices:
100-pin Daq devices:
I/O connectors
Maximum Working Voltage
8 differential
16 single-ended
32 differential
64 single-ended
One 68-pin male SCSI connector
Channel-to-earth:
42 Vrms
Channel-to-channel:
42 Vrms
Note: The SCB-68 is a shielded I/O connector block with 68 screw terminals
for easy signal connection to a National Instruments 68- or 100-pin DAQ
device. The SCB-68 features a general breadboard area for custom circuitry
and sockets for interchanging electrical components. These sockets or
component pads allow RC filtering, 4 to 20 mA current sensing, open
thermocouple detection, and voltage attenuation. The open component pads
allow signal conditioning to be easily added to the analog input (AI) signals
and to the DAC0OUT, DAC1OUT, and PFI0/TRIG1 signals of a 68-pin or 100pin DAQ device.
NI SCB-100
Number of screw terminals
I/O connectors
Cold-junction sensor
Maximum Working Voltage
101 (includes one no connect). All
I/O signals are available at screw
terminals
One 100-pin male 0.050 series
shielded D type connector
Accuracy
±0.5° C
Output
10 mV/° C
Channel-to-earth:
42 Vrms
Channel-to-channel:
42 Vrms
Note: The terminal block has 100 screw terminals for easy connection to
signal wires. A cold-junction compensation temperature sensor is included for
use with thermocouples. When the SCB-100 100-pin shielded connector
block is used with other 100-pin products, bypass the accessories (the cold
junction compensation temperature sensor and the signal accessory power
Cap. 1 – Il Banco
26
LED) using the six switches, leaving a generic 100-screw terminal connector
block. The SCB-100 also has a strain-relief bar for securing signal wires or
cables.
NI PCI-MIO-16E-4
Number of channels
Type of ADC
Resolution
Max sampling rate (single-channel)
Max working voltage (signal and
common mode)
Analog Output
Number of channels
Resolution
Digital I/O
Number of channels
Compatibility
Timing I/O
Number of channels
Resolution
Base clocks available
Analog trigger
Digital trigger
I/O connector
16 single-ended or 8 differential
(software-selectable per channel)
Successive approximation
12 bits, 1 in 4,096
500 kS/s
Each input should remain within
±11 V of ground
2 voltage
12 bits
8 input/output
TTL/CMOS
2 up/down counter/timers
1 frequency scaler
counter/timers
24 bits
frequency scaler
4 bits
Counter/timers
20 MHz, 100 kHz
Frequency scaler
10 MHz, 100 kHz
68-pin male SCSI-II type
Note: The PCI E Series boards are high-performance multifunction analog,
digital, and timing I/O boards for PCI bus computers. Supported functions
include analog input, analog output, digital I/O, and timing I/O.
NI PCI-6071E
Number of channels
Type of ADC
Resolution
Max sampling rate (single-channel)
Max working voltage (signal and
common mode)
64 single-ended or 32 differential
(software-selectable per channel)
Successive approximation
12 bits, 1 in 4,096
1.25 MS/s
Each input should remain within
±11 V of ground
Cap. 1 – Il Banco
Analog Output
Number of channels
Resolution
Digital I/O
Number of channels
Compatibility
Timing I/O
Number of channels
Resolution
Base clocks available
27
2 voltage
12 bits
8 input/output
TTL/CMOS
2 up/down counter/timers
1 frequency scaler
counter/timers
24 bits
frequency scaler
4 bits
Counter/timers
20 MHz, 100 kHz
Frequency scaler
10 MHz, 100 kHz
Analog trigger
Digital trigger
I/O connector
100-pin female 0.05 D-type
Note: The PCI E Series boards are high-performance multifunction analog,
digital, and timing I/O boards for PCI bus computers. Supported functions
include analog input, analog output, digital I/O, and timing I/O.
NI PCI 6713
Analog Output
Number of channels
Resolution
Voltage Output
Range
Output Impedance
Digital I/O
Number of channels
Compatibility
Timing I/O
Number of channels
Resolution
Base clocks available
8 voltage output
12 bits
±10V
0.1 ohm max
8 input/output
TTL/CMOS
2 up/down counter/timers
1 frequency scaler
counter/timers
24 bits
frequency scaler
4 bits
Counter/timers
20 MHz, 100 kHz
Cap. 1 – Il Banco
28
Frequency scaler
Digital trigger
I/O connector
10 MHz, 100 kHz
68-pin male SCSI-II type
Note: PCI 6713 device is a multifunction analog output, DIO, and timing
input/output (I/O) device.
NI PCI-MIO-16E-1
Number of channels
Type of ADC
Resolution
Max sampling rate (single-channel)
Max working voltage (signal and
common mode)
Analog Output
Number of channels
Resolution
Digital I/O
Number of channels
Compatibility
Timing I/O
Number of channels
Resolution
Base clocks available
Analog trigger
Digital trigger
I/O connector
16 single-ended or 8 differential
(software-selectable per channel)
Successive approximation
12 bits, 1 in 4,096
1.25 MS/s
Each input should remain within
±11 V of ground
2 voltage
12 bits
8 input/output
TTL/CMOS
2 up/down counter/timers
1 frequency scaler
counter/timers
24 bits
frequency scaler
4 bits
Counter/timers
20 MHz, 100 kHz
Frequency scaler
10 MHz, 100 kHz
68-pin male SCSI-II type
Note: The PCI E Series boards are high-performance multifunction analog,
digital, and timing I/O boards for PCI bus computers. Supported functions
include analog input, analog output, digital I/O, and timing I/O.
NI PXI 6120
Number of channels
Type of ADC
Resolution
4 pseudodifferential
16 bits, 1 in 65,536
Cap. 1 – Il Banco
Max sampling rate
Input impedance
29
800 kS/s
AI + to AI –
Range ≤ ±10 V:
1 MΩ in parallel with 100 pF
Range > ±10 V:
10 kΩ in parallel with 40 pF
AI – to AI GND
100 GΩ in parallel with 100 pF
AI + to AI GND
100 GΩ in parallel with 100 pF
Max working voltage for all analog Positive input (AI +)
input channels
±42 V for ±20 V and ±42 V ranges;
±11 V for other ranges
Negative input (AI –)
±2.5 V
Analog filters
Number
1
Type
5-pole Bessel
Frequency
100 kHz (software-enabled)
Analog Output
Number of channels
2 voltage
Resolution
16 bits, 1 in 65,536
Digital I/O
Number of channels
8 input/output
Compatibility
TTL/CMOS (see table)
Timing I/O
Number of channels
2 up/down counter/timers
1 frequency scaler
Resolution
counter/timers
24 bits
frequency scaler
4 bits
Base clocks available
Counter/timers
20 MHz, 100 kHz
Frequency scaler
10 MHz, 100 kHz
Analog trigger
Digital trigger
Note:
Cap. 1 – Il Banco
30
Dedicated A/D Converters per Channel –
for faster sampling rates per channel,
simultaneous sampling, and better
dynamic accuracy for transient or
frequency measurements.
200 mV to 42 V Input Ranges –
configure each analog input channel to
read from a very wide variety of voltage
ranges. The input impedance is lower
for 20 and 42 V ranges, preserving the bandwidth for signals with high
frequencies and large amplitudes.
AC or DC Coupling – analog inputs can be configured for AC or DC coupling
on a per-channel basis. AC coupling removes the DC offset for applications
only analyzing signals in the frequency domain.
Antialias Filters – the antialias filters are turned on from software on a perchannel basis. NI 6120 devices have 100 kHz filters for each channel.
Large Onboard Memory – NI 6120 devices feature a 64 Msample onboard
memory. With the extra memory,which requires no extra programming, you
can capture high-bandwidth signals over long periods of time, even if
multiple devices are sharing the same PCI or PXI bus.
Hardware-Timed Digital I/O – the digital I/O lines can synchronize with the
analog input, analog output, counter/timer I/O, or an external clock for
mixed signal measurement applications. Using the onboard FIFO, you can
achieve reliable data transfers to 10 MBytes/s.
Phase Locking (PXI only) – multiple devices can be synchronized to a
common PXI backplane clock to preserve the phase between measurements
across multiple device analog input channels.
Table: Digital Logic Levels
Level
Min
Max
Input low voltage
0.0 V
0.8 V
Input high voltage
2.0 V
5.0 V
Input low current
— –320 μA
(Vin = 0 V)
Input high current
—
10 μA
(Vin = 5 V)
Output low voltage
—
0.4 V
(IOL = 24 mA)
Output high voltage
4.35 V
—
(IOH = –13 mA)
Cap. 1 – Il Banco
31
1.4 I provini.
L’ingranaggio è realizzato mediante
due ruote dentate da 80 denti con
angolo di pressione pari a 22.5°.
Alla massima velocità di rotazione
consentita dal banco, 18000
giri/min, si avrà una frequenza di
ingranamento pari a:
fg = 18000/60 * 80 = 24 kHz
Per una analisi spettrale significativa sarebbe auspicabile monitorare fino
alla terza armonica, quindi l’accelerometro dovrebbe avere una banda
passante almeno pari a :
fbw = 24·103 * 3 = 72 kHz
Risultano quindi assolutamente appropriate la disposizione degli
accelerometri secondo le direzioni parellele ed ortogonali alle possibili
rette di azione delle ruote e la banda passante degli accelerometri
impiegati per il monitoraggio della prima armonica.
Cap. 2 – La Coppia
32
2.
La Coppia.
2.1 Un nuovo sistema per il rilevamento della coppia.
Durante i test, l’albero torsiometrico per il rilevamento della coppia si è
rivelato piuttosto “delicato” rispetto alle gravose condizioni di prova a
cui i provini vengono sottoposti, andando incontro a frequenti
danneggiamenti. E’ emersa, quindi, la necessità di implementare un
sistema più “robusto” per il monitoraggio della coppia.
Si è proceduto (Cap.2), innanzi tutto, ad un’analisi dei sistemi di bordo
più diffusi per i motori Turboelica, ritenuti, a livello di catena cinematica
ed erogazione di coppia, i più simili al banco.
Successivamente è stata verificata l’applicabilità dei principi di
funzionamento di uno sistemi descrittti al banco, da un punto di vista
teorico e sperimentale.
Sono state esplorate diverse possibili implementazioni in tratti differenti
della catena cinematica (Cap.3, 4).
Infine sono state definite le specifiche del sistema definitivo (Cap.5).
Cap. 2 – La Coppia
33
2.2 Sistemi di rilevamento per motori Turboelica.
L’indicatore di coppia (torquemeter) fornisce al pilota l’entità della
potenza sviluppata dal motore in ogni fase del volo e può essere calibrato
in unità di coppia (Pounds Feet [lbs.ft.], Newton meters [NM],..) o di
potenza (Brake Horse Power [BHP], Shaft- [SHP],..). La presenza
dell’indicatore di coppia è resa possibile dal fatto che il motore a turbina
funziona con un ciclo operativo continuo quindi la coppia che i gas della
combustione imprimono alla turbina, a parità di posizione della leva di
potenza e di condizioni ambientali, non è oscillante come quella
impressa all’albero da un motore a pistoni bensì costante e quindi
facilmente misurabile.
I rilevatori di coppia vengono in genere montati nelle scatole degli
ingranaggi del riduttore di giri, sempre interposte tra l’albero della
turbina e quello dell’elica: le velocità di rotazione dei motori a turbina
rendono infatti impossibile l’applicazione diretta dell’elica sull’albero
motore, come avviene per i motori a pistoni.
In figura lo schema di un riduttore epicicloidale a satelliti cilindrici e
conici. E’ estremamente compatto e bilanciato poiché tutte le parti
mobili ruotano intorno al medesimo asse centrale.
Cap. 2 – La Coppia
34
Può utilizzare ingranaggi a
denti dritti, obliqui, o
elicoidali che sviluppano
una
spinta
assiale,
proporzionale alla coppia
trasmessa all’elica, utile per
realizzare un dispositivo di
misura.
Vengono di seguito descritti due sistemi di bordo tipici, per il
rilevamento della coppia.
2.2.1 Rilevatore idromeccanico.
Rileva la posizione di un pistone idraulico che determina le pressioni
necessarie a contrastare la spinta assiale di satelliti a denti elicoidali
(figura precedente) o a bilanciare la coppia esercitata sulla corona:
analizzeremo in dettaglio quest’ultimo schema. Nella configurazione in
figura l’ingresso (albero della turbina) è sul solare, la corona rimane in
posizione stazionaria, l’uscita (albero dell’elica) è sul planetario.
Il moto dei satelliti, messi
in rotazione dal solare,
tende a spingere la corona,
libera di ruotare, in senso
contrario.
La rotazione della corona
è contrastata da due
pistoni ad essa collegati
mediante
leveraggi,
comandati idraulicamente
da una pompa.
La posizione della corona, quindi dei pistoni all’interno dei cilindri,
determina la parzializzazione di una luce di by-pass (bleed port) che
adegua la pressione agente sui pistoni alla forza necessaria a contrastare
la spinta dei satelliti.
Cap. 2 – La Coppia
35
2.2.2 Rilevatore elettronico.
Rileva lo sfasamento tra due ruote dentate. Viene in genere interposto tra
l’albero della turbina ed il riduttore di giri. E’ costituito da due alberi
cavi disposti l’uno dentro l’altro, portati in rotazione dal pignone
dell’albero della turbina.
Gli alberi ruotano entrambi alla stessa velocità della turbina, ma il carico
meccanico generato dalla coppia motrice è trasmesso al riduttore solo da
quello interno, che perciò è il solo sottoposto a torsione, la quale è tanto
maggiore quanto maggiore è la coppia motrice. L’albero esterno ha solo
la funzione di fare da riferimento per la posizione reciproca assunta dai
denti di due ruote dentate, montate ognuna all’estremità anteriore dei due
alberi. I denti dei due ingranaggi sono perfettamente allineati quando la
tosione, e quindi la coppia motrice, è zero. Poi, man mano che la coppia
aumenta, la torsione subita dall’albero interno crea un disallineamento
tra i denti dei due inganaggi che cresce in proporzione diretta con
l’aumento dela coppia motrice. E’ proprio l’ampiezza di questo
disallineamento, “letta” tipicamente mediante pick-up magnetici, a
fornire un segnale proporzionale alla coppia.
Cap. 2 – La Coppia
36
2.2.3 Bibliografia.
- Rizzardo Trebbi, I testi del pilota professionista – Strumenti e
Navigazione, Ed. AVIABOOKS
- The Jet Engine, ROLLS ROYCE LIMITED
- JAA-ATPL (Joint Aviation Authorities - Airline Transport Pilot’s
Licence), Theoretical Knowledge Manual, Oxford Aviation
Services Limited - Jeppesen GmbH
Cap. 2 – La Coppia
37
2.3 Fattibilità.
Dei sistemi descritti, il rilevatore elettronico appare il più idoneo ad
essere implementato. Il banco presenta, infatti, diversi tratti di catena
accessibili, inoltre, i suoi principi di funzionamento sono compatibili con
quelli del rilevatore.
2.3.1 I principi di funzionamento.
I provini (Z80) sono collegati agli ingranaggi a 39 denti (Z39) del
moltiplicatore tramite alberi accoppiati mediante giunti. Per semplicità li
schematizzeremo con due alberi dalle rigidità torsionali equivalenti.
La coppia, generata dallo spostamento assiale di due ingranaggi (Z119 in
verde) a dentature elicoidale, produce una torsione degli alberi che si
traduce in uno sfasamento relativo delle Z39 variabile con la coppia
applicata; misurando lo sfasamento sarà allora possibile risalire ad essa.
In figura (vista “Posteriore”), i versi considerati positivi di rotazione del
motore (antiorario sulla Z119 in giallo) e di coppia sui provini (orario
sulle Z80, in rosso).
Cap. 2 – La Coppia
38
Fianco
DX
Seguendo un approccio euristico al problema,
applichiamo una coppia “positiva”: guardando le Z80 di
fronte (vista “Anteriore”) il fianco attivo dei denti sarà
il sinistro.
Fianco
SX
Faccia con
marcatura:
FASE 80xx
Consideriamo la torsione dell’albero
equivalente di sinistra: supponendo
“fissa” la Z80, si avrà uno sfasamento
della Z39 pari ad α1.
α1
Analogamente sull’albero equivalente di
destra: supponendo “fissa” la Z80, si avrà
uno sfasamento della Z39 pari ad α2.
α1
α2
Considerando i sensi di ingranamento
delle Z80, possiamo riportare α2 sulla
Z39 di sinistra.
α1
α2
Cap. 2 – La Coppia
39
2.4 Analisi dei segnali.
1/4 1/(RPM/60)
1/4 1/(RPM/60)
α1 α
2
αr
sin[-ω0t+nD(α1+α2+αr)]
avendo posto:
;
“Poniamo” due sensori in
prossimità
delle
Z39,
supponendo il motore in
rotazione
“positiva”,
considerando la posizione a t=0
come in figura e tenendo conto
anche della posizione relativa
delle due ruote in assenza di
torsione (αr), otterremo due
segnali che possono essere
schematizzati con andamenti
sinusoidali:
sin(ω0t)
ω0 = 2π nD RPM/60
nD rappresenta il numero dei denti della ruota (nel caso, 39).
Poniamo la prima in una forma più significativa:
sin[-ω0t+nD(α1+α2+αr)] =
ricordando che:
sin(-ϕ) = sin(π+ϕ)
= sin[-(ω0t-nD(α1+α2+αr)] =
= sin[ω0t+π-nD(α1+α2+αr)] =
= sin(ω0t+αd)
ponendo:
αd = π-nD(α1+α2+αr)
Cap. 2 – La Coppia
40
Ancora:
= sin(ω0t+ω0 αd/ω0) =
ponendo:
td=αd/ω0
= sin[ω0(t+td)]
Le espressioni trovate esprimono in maniera formale il concetto che i
segnali rilevati dai sensori effettivamente portano celate informazioni
relative allo sfasamento delle Z39. In particolare la prima forma
suggerisce un’analisi nel dominio della frequenza, per ricavare αd, la
seconda un’analisi del domino del tempo, per ricavare td.
2.4.1 Analisi nel dominio della frequenza.
Partiremo dalla seconda espressione trovata, quindi, è necessario
ricordare, dalla Teoria dei Segnali, il teorema del ritardo.
2.4.1.1 Teorema del Ritardo.
Dato:
x(t) ⇔ X(ω)
dove:
X(ω)=F{x(t)}
allora:
x'(t-td) ⇔ X'(ω) = X(ω)
e-jωtd
La
traslaszione
temporale
corrisponderà ad un ritardo se
td>0, ad un anticipo se td<0.
Questa proprietà mostra che un ritardo temporale modifica lo spettro di
fase della trasformata del segnale ma non cambia il suo spettro di
ampiezza.
|X'(ω)| = |X(ω)|
∠ X'(ω) = ∠ X(ω) - ωtd
In particolare, lo sfasamento
introdotto dal ritardo td varia
lineramente con la frequenza.
Cap. 2 – La Coppia
41
2.4.1.2 Effetto sugli Spettri di Ampiezza e Fase.
||
||
1/2
1/2
-ω0
1/2
1/2
-ω0
ω0
ω0
∠
∠
π/2
π/2 - αd
-π/2 + αd
-π/2
∠ X'(ω) = ∠ X(ω) + ωtd
Analizzando gli spettri di fase si evince che, effettuandone la differenza,
in corrispondenza della fondamentale ω0 otterremo, appunto, αd. In
particolare, considerano come minuendo lo spettro di destra:
(-π/2) – (-π/2+αd) = -αd =
= -π + nD(α1+α2+αr)
ω0td = ω0 αd/ω0 = αd
che, data la periodicità angolare di 2π,
può anche essere scritta come:
= π + nD(α1+α2+αr)
2.4.1.3 Effetto della posizione iniziale.
Nel paragrafo 3.2 si è supposto che il verso di rotazione definito positivo
fosse quello in senso orario e che la Z39 di destra fosse inizialmente in
posizione “centrale”, cioè a fase nulla; ripetiamo l’analisi nel caso di
posizione iniziale qualsiasi.
Cap. 2 – La Coppia
42
Consideriamo due ruote formanti un ingranaggio:
ingranaggio:
αi
sin[-ω0t + nD αi] =
sin[-ω0(t -ti)]
La rotazione in un senso dell’una
comporterà una rotazione di pari
entità dell’altra nel senso opposto.
Questo, formalmente, potrà essere
rappresentato con una stessa
traslazione nel tempo per entrambi:
αi
;
sin[ω0t - nD αi] =
sin[ω0(t – ti)]
Applicando questo risultato all’analis
all’analisi già condotta:
x2 = sin[ω0(t–ti)]
∠ X2(ω0) = ∠ X(ω0) - ω0ti
x1 = sin[-ω0(t-ti)+nD(α1+α2+αr)] =
= sin[-(ω0(t-ti)-nD(α1+α2+αr)] =
= sin[ω0(t-ti)+π-nD(α1+α2+αr)] =
= sin(ω0(t-ti)+αd)
= sin(ω0(t-ti)+ω0 αd/ω0) =
= sin[ω0(t-ti+td)]
∠ X1(ω0) = ∠ X(ω0) - ω0ti + ω0td= ∠ X2(ω0) + ω0td
La traslazione temporale comporta identici effetti sugli spettri di fase
che, nella differenza, si elidono, quindi, la posizione iniziale non
influenza il metodo.
Cap. 2 – La Coppia
43
2.4.1.4 Effetto dell’applicazione di una coppia negativa.
Con considerazioni analoghe al
caso
precedente
di
coppia
“positiva”:
1/4 1/(RPM/60)
1/4 1/(RPM/60)
α2
α2
α1 α'r
α1
Avendo applicato una coppia “negativa”, guardando le Z80 di fronte il
fianco attivo dei denti sarà il destro, quindi, supponendo il motore in
rotazione “positiva”, la posizione relativa delle due ruote in assenza di
torsione (α′r) varierà rispetto al caso precedente. Considerando la
posizione a t=0 come in figura, otterremo i segnali:
sin[-ω0t+nD(-α1-α2+α'r)]
;
sin(ω0t)
da cui:
sin[-ω0t-nD(α1+α2-α'r)] =
= sin[-(ω0t+nD(α1+α2-α'r)] =
= sin[ω0t+π+nD(α1+α2-α'r)] =
ponendo:
α'd = π+nD(α1+α2-α'r)
= sin(ω0t+α'd)
= sin(ω0t+ω0 α'd/ω0) =
= sin[ω0(t+t'd)]
ponendo:
t'd=α'd/ω0
Cap. 2 – La Coppia
44
Si ottengono gli spettri:
||
||
1/2
1/2
- ω0
1/2
1/2
- ω0
ω0
ω0
∠
∠
π/2
π/2- α'd
- π/2 + α'd
- π/2
∠ X'(ω) = ∠ X(ω) + ωt'd
Sempre considerando come minuendo lo spettro di destra:
(-π/2) – (-π/2+α'd) = -α'd =
= -π - nD(α1+α2-α'r)
= π + nD(-α1-α2+α'r)
Nel caso precedente:
(-π/2) – (-π/2+αd) = -αd =
= π + nD(α1+α2+αr)
Si osservi che effettuando la misurazione su uno stesso albero si
eliminerebbe l’effetto della posizione relativa delle due ruote in assenza
di torsione (αr , α′r).
Cap. 2 – La Coppia
45
2.4.1.5 Effetto del sampling multiplexato.
Siano dati i segnali:
sin[ω0(t+td)]
;
sin(ω0t)
Supponiamo che i segnali
vengano
campionati
in
maniera multiplexata, in
particolare che il segnale di
destra venga campionato,
nell’ordine, prima di quello di
sinistra. Otterremo:
sin[ω0(t+td+ts)]
;
sin(ω0t)
Il segnale di sinistra risulta
anticipato di ts, tempo
necessario al sistema per
switchare da un canale
all’altro ed effettuare il
campionamento. Nel caso la
massima
frequenza
di
campionamento su un singolo canale (Spsmax) coincida con quella
complessiva nel caso multiplexato (caso ideale) avremo:
ts max= (nCh-1)/Spsmax
dove nCh indica il numero di canali
multiplexati.
E’ da notare che lo sfasamento introdotto da td è indipendente da ω0
mentre, quello dovuto
ω0td = ω0 αd/ω0 = αd = π - nD(α1+α2+αr) a ts, è variabile,
linearmente, con ω0,
ed
eventualmente
ω0ts max = ω0 (nCh-1) / Spsmax
andrà compensato.
E’ importante sottolineare che nel caso di α1(t), α2(t) le variazioni
dovranno essere sufficientemente lente da consentire l'ipotesi di quasi
stazionarietà nell'intervallo adottato per la FFT altrimenti si assisterebbe
ad uno shift in frequenza del segnale di sinistra.
Cap. 2 – La Coppia
46
2.4.1.6 Simulazioni mediante analisi in frequenza.
Le prove sperimentali che vengono riportate
si riferiscono all’applicazione del metodo
descritto ai segnali tachimetrici forniti dai
pickup. Il grafico mostra l’andamento dell’
αd a vari regimi di rotazione.
Pick-up
magnetico
2,95
Sfasamento [rad]
2,90
2,85
2000
2916
4200
2,80
Velocità
2,75
2,70
0
1
2
3
4
5
6
Coppia [Nm * 102]
2.4.1.7 Problematiche e miglioramenti
Dal grafico si evince, effettuando una linearizzazione ai minimi quadrati,
come gli andamenti siano affetti da un “termine” indipendente dalla
coppia ma variabile con la velocità. Sono in corso approfondimenti tesi a
individuarne le cause.
La precisione con cui le viti sono posizionate non è elevatissima
generando, quindi, un treno d’impulsi di periodo leggermente diverso.
La decisione di riapplicare il metodo “leggendo” le Z39 mira ad ottenere
un segnale periodico estremamente preciso.
Cap. 2 – La Coppia
47
2.4.2 Analisi nel dominio del tempo.
Per implementare il metodo precedentemente esposto è necessario
utilizzare dispositivi dalle notevoli capacità computazionali, che
consentano, in tempo reale, di effettuare la FFT.
2.4.2.1 Misura del ritardo.
td
Per
determinare
td
dovremo
individure punti caratteristici delle
forme d’onda ( ad esempio passaggio
per zero, picchi, ecc.) e misurare il
ritardo. Tuttavia le non idealità legate
agli andamenti reali dei segnali
possono introdurre errori.
x(t+td)
x(t)
2.4.2.2 Andamenti non identici.
I segnali forniti dai sensori potrebbero avere andamenti
non identici, ad esempio perchè le risposte dei sensori,
la posizione, le angolazioni, la distanza rispetto alle
ruote o le ruote stesse potrebbero essere diverse. Ciò
potrebbe comportare uno sfasamento relativo di
armoniche corrispondenti e comunque implica una
scelta specifica per ciascun segnale del punto
caratteristico.
2.4.2.3 Wandering della linea base.
Può risultare particolarmente deleterio nel caso si
scelga come punto caratteristico il passaggio per lo zero
(zero crossing). Si può ovviare con un opportuno
filtraggio passa alto (HighPass).
Cap. 2 – La Coppia
48
2.4.2.4 Assenza di punti angolosi.
Determinerebbe una eccesiva incertezza sulla posizione
del picco. Può essere utile l’applicazione di un filtro
numerico (convolutivo) di sharpening (ad es. passa alto,
derivatore, ecc.) e la conseguente individuazione di un
opportuno punto caratteristico.
2.4.2.5 Dipendenza dell’andamento dall’RPM.
La velocità di rotazione potrebbe sia “scalare” i segnali, variandone
l’ampiezza picco-picco (come tipicamente accade per i sensori magnetici
analogici) che modificarne gli andamenti. Al primo effetto si può ovviare
“normalizzando” il segnale con un opportuno circuito di
condizionamento, al secondo creando, con un processo di calibrazione,
una “mappatura” della risposta.
2.4.2.6 Aree di sovrapposizione.
Consiste nel valutare l’area di sovrapposizione delle due forme d’onda
che varierà, evidentemente, con lo sfasamento. Può essere implementato
banalmente valutando la somma dei prodotti dei campioni corrispondenti
su un certo periodo. E’ un metodo che risente delle non idealità descritte
ai paragrafi precedenti, inoltre i periodi d’integrazione dovranno essere
tali che, agli istanti iniziali e finali, le fasi delle forme d’onda siano
rispettivamente corrispondenti in tutti i periodi.
2.4.2.7 Simulazioni mediante analisi nel dominio del tempo.
Si riferiscono a simulazioni numeriche sui segnali tachimetrici di prove
effettuate in precedenza a 2916 RPM motore. Le prove sono relative a
rampe di carico variando la coppia applicata da 100 a 500 Nm. E’ stato
valutato sia il metodo della misurazione del ritardo che quello della
sovrapposizione delle aree: il secondo sembra essere particolarmente
promettente, il primo soffre, evidentemente, delle imprecisioni del treno
d’impulsi.
Cap. 2 – La Coppia
Ritardo
1,45E+02
1,44E+02
1,43E+02
1,42E+02
1,41E+02
AreeSovrapposte
6,40E+04
6,30E+04
6,20E+04
6,10E+04
6,00E+04
5,90E+04
5,80E+04
TorsiometroManner
6,00E+02
5,00E+02
4,00E+02
3,00E+02
2,00E+02
1,00E+02
0,00E+00
49
Cap. 2 – La Coppia
Per completezza, si riportano anche i risultati a 1500 RPM motore.
Ritardo
2,73E+02
2,71E+02
2,69E+02
2,67E+02
2,65E+02
Aree Sovrapposte
1,44E+04
1,42E+04
1,40E+04
1,38E+04
1,36E+04
1,34E+04
1,32E+04
TorsiometroManner
6,00E+02
5,00E+02
4,00E+02
3,00E+02
2,00E+02
1,00E+02
0,00E+00
50
Cap. 2 – La Coppia
51
La variabilità aumentata e gli “spike” che affliggono il primo dipendono
dal fatto che la determinazione del punto caratteristico diventa
maggiormente difficoltosa al diminuire della velocità a seguito del
deterioramento qualitativo (la forma d’onda “peggiora”) e quantitativo
(l’ampiezza picco-picco diminuisce) del segnale dei pickup. Nell’ottica
di contenere il peso computazionale degli algoritmi, ancora una volta si
confida nella superiore qualità del segnale ricavato sulle Z39 e sulla
possibilità di “squadrarlo” mediante un semplice circuito elettronico. Il
secondo sembra invece tollerare molto meglio il deterioramento; rimane
tuttavia il problema dalla variazione di scala.
2.4.2.8 Problematiche e miglioramenti
E’ stato evidenziato come gli andamenti, pur ricalcando la rampa di
carico acquisita mediante il torsiometro Manner in dotazione al banco,
mostrino uno scarto rispetto alla retta ai minimi quadrati non
trascurabile. Ci si aspetta miglioramenti utilizzando i segnali “letti” sulle
Z39, eventualmente “squadrati”.
Un metodo alternativo consisterebbe nel misurare lo sfasamento con un
counter ed utilizzare i segnali dei pickup come “trigger” di inizio e fine
ciclo.
Cap. 3 – L’Apparato Sperimentale
52
3.
L’Apparato Sperimentale.
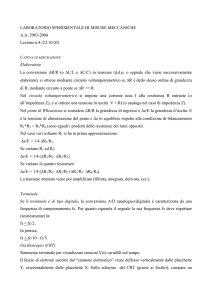
Seguendo le indicazioni emerse dalle simulazioni si è proceduto
all’allestimento dell’apparato sperimentale. Dopo averne delineato le
specifiche, sono stati scelti i pickup e ne è stato realizzato il
condizionamento. Le prove sperimentali sono state effettuate su un
tratto di catena cinematica comprendente entrambi gli alberi veloci
3.1 La Torsione.
Supponendo gli alberi lavorino in campo elastico lineare potremo
esprimere la coppia circolante C come:
C = kiαi
dove k rappresenta la Rigidezza
Torsionale equivalente ed α l’angolo di
torsione, in altri termini lo sfasamento tra
la Z39 e la Z80 a seguito della torsione
dell’albero come reazione alla coppia
circolante. Le k sono state valuate in:
k1=9.649*104 Nm/rad
;
α1
α2
k2=7.778*104 Nm/rad
Costituendo le Z80 un ingranaggio, non potrà che essere:
C = k1α1 = k2α2
da cui:
α1 = C/k1 ; α2 = C/k2
ponendo:
C = (1/k1 + 1/k2)-1 α = k α
α = α1 + α2 ; 1/k = (1/k1 + 1/k2)
Cap. 3 – L’Apparato Sperimentale
53
Avremo:
1 rad = 57,295780°
k = 4,307*104 Nm/rad
α1
α2
α
100 Nm
0,059380°
0,073664°
0,133044°
500 Nm
0,296900°
0,368319°
0,665220°
Allora, volendo una risoluzione di 10 Nm dovremo essere in grado di
valutare sfasamenti:
(α@500 - α@100) 10/(500-100) ≅ 0,01°
Alla massima velocità di rotazione dei Test Articles (18000 RPM):
0,01 / (360*18000/60) ≅ 0,11 μs
rappresenta la risoluzione temporale necessaria, che comporterebbe una
frequenza di acquisizione:
fα = 10 * 1/0,11E-6 = 90,9 MHz
La risoluzione del grafico di fase della FFT dovrà essere pari a:
Δαd = nD Δα = 39*0,01 = 0,39°
Nelle prove successive, tuttavia, si adotteranno frequenze d’acquisizione
ben inferiori, sperando di ottenere comunque risoluzioni accettabili,
sfruttando le incertezze sulla misure derivanti dalla discretizzazione,
effettuando medie su un numero sufficientemente elevato di campioni.
Cap. 3 – L’Apparato Sperimentale
54
3.2 I Sensori.
Sono stati scelti dei sensori analogici passivi.
3.2.1 Pickup a Riluttanza MagneticaVariabile.
Camme, ingranaggi, punterie, manovellismi, in
azione tutti questi dispositivi compiono
rotazioni, oscillazioni, scorrimenti, periodici o,
comunque, regolari. Le loro rientranze e
sporgenze, tacche e dentellature, in movimento,
possono appunto attivare questi sensori.
Il numero, l’ampiezza e la frequenza degli
impulsi generati consentono di estrapolare
informazioni di posizione, velocità lineare o
angolare, in una parola, di movimento.
Sono sensori non-contact, quindi non
interferiscono con il moto degli attuatori,
sono maintenace-free e garantiscono
affidabilità per un tempo di vita
lunghissimo. Inoltre, essendo passivi, non
richiedono alimentazione esterna.
3.2.1.1 Principi di funzionamento.
Un magnete permanente all’intero del sensore
“proietta” un campo magnetico nell’area prospiciente
il nucleo cilindrico (pole piece). Un attuatore
ferromagnetico (carbon steel, magnetic stainless
steel, iron) che bruscamente si avvicini od allontani
da quest’area, altera il valore della riluttanza e
produce una tensione ai capi della bobina (coil).
E’ sufficiente una velocità dell’attuatore di 100 ips (inch per second),
equivalenti a 2,54 m/sec, per generare un segnale utile, la cui ampiezza
sarà proporzionale alla velocità dell’attuatore e il cui andamento ne
ricalcherà la forma. Una rapida successione di passaggi genererà una
serie di cicli distinguibili fino a frequenze di ripetizione dell’ordine del
MHz.
Cap. 3 – L’Apparato Sperimentale
55
3.2.1.2 Indicazioni per l’impiego.
Al crescere dell’air-gap, diminuisce la capacità dell’attuatore di generare
un segnale. Le condizioni standard per i test industriali sui sensori
prevedono un air-gap di 0.005′′(0,13 mm) mentre in condizioni
d’impiego tipiche si arriva fino a 0.080′′(2
mm). E’ possibile compensare l’aumento
fino a 0.2′′(5 mm) incrementado la densità
di flusso magnetico, a condizione che la
velocità non scenda al di sotto dei 100
ips(2,54 m/sec) e che il matching dei fattori
di forma sia ottimale.
L’ampiezza e la frequenza del segnale sono direttamente proporzionali
alle variazioni di flusso ed alla velocità dell’attuatore. A meno che la
larghezza (“A”) dell’attuatore sia di molto
superiore al diametro del pole-piece (“D”), in
corrispondenza del passaggio per lo zero del
segnale l’asse centrale del pole-piece e
dell’attuatore saranno esattamente allineati,
quindi lo zero-crossing potrà essere assunto
quale riferimeto di una posizione ben precisa.
3.2.1.3 Scelta del sensore.
Prima discriminante per la scelta di un sensore sono le sue dimensioni.
Generalmente più è grande, maggiori sono la sua durevolezza e le
tensioni fornite in uscita ma, evidentemente, bisognerà tener conto dello
spazio disponibile e dei costi. Si noti che un output elevato consente di
limitare l’effetto delle interferenze elettromagnetiche.
A parità di densità magnetica, che dipenderà anche dal tipo di materiale
magnetico impiegato (Alnico, ferrite, terre rare quali Samario, Cobalto,
ecc.), magneti più grandi consentono campi
magnetici maggiori (valori tipici spaziano nel
range 700÷1900 gauss, misurati in presenza di
un ingranaggio e con un air-gap di 0,005′′). Il
diametro del pole-piece (tipicamente nel range
0,060′′÷0,250′′) inciderà sulla “portata” del
flusso magnetico.
Cap. 3 – L’Apparato Sperimentale
56
L’impedenza del sensore è determinata dalla bobina. I criteri di progetto
prevedono la massimizzazione della tensione d’uscita (che dipende dal
numero di avvolgimenti) e la minimizzazione delle capacità parassite.
Tuttavia nella applicazioni nelle quali è prioritaria la potenza piuttosto
che il valore della tensione fornita, si adottano, per gli avvolgimenti, fili
di sezione maggiore riducendo, così, la resistenza ed incrementando la
potenza che il sensore può fornire. Inoltre, maggiori sono le dimensioni
della bobina, più è il rame esposto al flusso, maggiore è l’output di cui il
sensore è capace. Range tipici di resistenza ed induttanza sono
rispettivamente 50÷10000Ω e 10÷3000mH.
I pickup sono progettati per sopportare severe condizioni di lavoro
(vibrazioni, shock meccanici, elevate temperature, umidità, presenza
d’olio), ne vengono tuttavia realizzate versioni per impiego specifico
(atmosfere corrosive, temperature estreme, elevate o basse velocità, ecc.)
3.2.1.4 Scelta del pole-tip.
Il diametro del pole-piece e la forma della
sua
estremità
esposta
(pole-tip)
determinano la risoluzione del pickup,
oltre che l’entità dell’output.
Cilindrico: è il più comune (ed anche il più economico per
ovvie considerazioni legate alla lavorazione) e consente la
maggiore superfice affacciata, massimizzando le capacità di
assorbimento e conduzione del flusso magnetico, quindi,
l’output. Ne risente, tuttavia, la risoluzione.
Conico: incrementa la risoluzione riducendo l’area del poletip, consentendo un elevato matching dei fattori di forma ed
una minor distanza tra gli attuatori (“C”). Necessita della
lavorazione più sofisticata e tolleranze strettissime. Non
richiede ulteriori specifiche di orientazione in fase di
installazione. Ne risente, fortemente, l’output.
Cap. 3 – L’Apparato Sperimentale
57
Punta a cesello: consente una risoluzione
paragonabile al conico ma senza sacrificare
l’output. Ha una orientazione vincolata, come in
figura, e presuppone che la superfice
dell’attuatore sia sufficientemente ampia da
contenere la larghezza della punta.
A gradino: combina la capacità di risoluzione del conico ed i
benefici di una lavorazione semplificata. A differenza del
conico è indicato per diametri del tip maggiori, meno esposti a
danneggiamenti da trasporto, installazione, o imputabili alla
lavorazione stessa.
Personalizzato: nel caso in figura consente,
ad esempio, un montaggio assiale, piuttosto
che radiale, rispetto ad una ruota dentata.
Essendo due le superfici del pole-piece
affacciate su dente, l’output risulta
notevolmente incrementato. Le tolleranze
richieste sono, tuttavia, strettissime.
3.2.2 Bibliografia.
- Magnetic PickUp, TSI Trasducer Systems, Inc.
- Digital Magnetic PickUp – Operating Instructions, TSI Trasducer
Systems, Inc.
- Sensors, AI-TEK INSTRUMENTS, LLC
- Hall Effect Gear Tooth Sensors – Sensing and Control, Honeywell
Inc.
Cap. 3 – L’Apparato Sperimentale
58
3.3 Il condizionamento.
3.3.1 Partitore resistivo.
Per caratterizzare i segnali forniti dai sensori (del tipo Airpax 700851010-053), montati mantenendo un opportuno air gap di sicurezza, sono
state effettuate delle misure, mediante un tester a vero valore efficace, a
varie velocità di rotazione nel range di funzionamento tipico del banco.
80
Tensione PickUP1 (Vrms)
70
60
50
40
30
20
10
0
0
-1000
-2000
-3000
-4000
-5000
RPM motore
+
Si osserva che, all’aumentare del regime di rotazione, l’ampiezza del
segnale cresce progressivamente. Vista la notevole escursione, è stato
necessario riportare il segnale nel range di acquisizione della scheda (del
tipo NI PXI 6120).
-
R2
Vout
D1
D2
-
Vin
+
R1
Si è scelto uno schema passivo:
un partitore resistivo con due
diodi Zener back to back di
clipping. Il trimmer consentirà
di variare il rapporto di
partizione
ed
una
sua
regolazione fine.
Ai fini del dimensionamento è
necessario premettere delle
considerazioni.
Cap. 3 – L’Apparato Sperimentale
59
I sensori sono caratterizzati, in uscita, da un’impedenza composta da una
resistenza in serie ad un’induttanza i cui valori sono stati stimati,
confrontando i dati riportati sui datasheet di modelli analoghi, in 700Ω e
125mH. Alle basse frequenze, cioè a bassi regimi di rotazione, sarà
possibile trascurare la componente induttiva, viceversa, alle alte
frequenze essa comporterà un aumento considerevole dell’impedenza ma
questo, ai fini dell’attenuazione del segnale, costituirà un vantaggio.
Vpp
Vmax
Vrms
Poichè la forma d’onda fornita ha un
andamento quasi sinusoidale potremo
adottare la formula:
Vrms = Vmax/√¯2 = Vpp/(2*√¯2)
La scheda presenta un’impedenza d’ingresso composta da una resistenza
in parallelo ad una capacità pari, avendo impostanto come range di
acquisizione +/- 10V, rispettivamente a 1MΩ e 100pF. Alle basse
frequenze sarà possibile trascurare la componente capacitiva, viceversa,
alle alte frequenze essa comporterà una diminuzione considerevole
dell’impedenza ma questo, ai fini dell’attenuazione del segnale,
costituirà un vantaggio.
Nell’analisi che segue ci si è posti in un’ottica worst case trascurando, ai
fini del dimensionamento delle resistenze R1 ed R2, l’impedenza del
sensore e della scheda e supponendo, per la determinazione della
massima dissipazione dei diodi, R1 in corto, R2 interrotta ed il sensore in
grado di erogare una corrente qualsivoglia elevata.
3.3.1.1 Dimensionamento delle resistenze.
Dal grafico appare opportuno scegliere come valore di sicurezza una
Vrms=80V che corrisponde ad una Vmax≅110V. Essendo:
Vout = Vin/(1+R1/R2)
dove per Vout, Vin si intendono i valori
massimi, si ottiene il rapporto:
r = R2/R1 = 1/10.
Si è implicitamente supposto l’impedenza della scheda sufficientemente
elevata.
Cap. 3 – L’Apparato Sperimentale
60
Ricordando che:
Px = Rx I² ; I = Vin/(R1+R2)
intendendo ora per Vin il valor
efficace, si ricavano i vincoli affinchè la massima potenza dissipabile
dalle resistenze (Pr, Power Rating) sia rispettata:
P1 = R1 ( Vin/(R1+R2) )² = 1/R1 (Vin/(1+R2/R1) )² < Pr
⇒ R1 > 1/Pr (Vin/(1+r) )²
P2 = R2 ( Vin/(R1+R2) )² = r 1/R1 (Vin/(1+R2/R1) )² < Pr
⇒ R1 > r/Pr (Vin/(1+r) )²
Essendo r < 1, rispettata la prima, la seconda risulterà automaticamente
soddisfatta. Si osservi che, tenendo in conto l’impedenza della scheda,
fissata R1, all’aumentare della frequenza r tenderà a ridursi, al limite
annullandosi. Il vincolo limite diverrà, allora:
⇒ R1 > 1/Pr (Vin)²
Questo vincolo limite risulta utile anche nel caso erroneamente si
regolasse il trimmer su valore nullo.
Vin max [V]
Pr [W]
Vout/Vin
r (R2/R1)
R1 > [Ω]
⇒ R2 [Ω]
110
110
110
110
110
110
110
110
0,15
0,15
0,15
0,15
0,25
0,25
0,25
0,25
1/10
1/11
1/12
0
1/10
1/11
1/12
0
1/9
1/10
1/11
0
1/9
1/10
1/11
0
32670
33333
33891
40333
19602
20000
20335
24200
3630
3333
3081
2178
2000
1849
Per la determinazione finale di R1,R2 bisognerà poi tener conto della
massima corrente erogabile dal sensore.
Cap. 3 – L’Apparato Sperimentale
61
3.3.1.2 Scelta dei diodi Zener.
Considerando una VF tipica di 1V,
sceglieremo, tenendo conto anche
delle
tolleranze
sui
valori
nominali, una: VZ=8,2V.
Avremo:
Id1 = Id2 = (Vin-Vf-Vz)/Rsens
intendendo per Vin il valor medio
su un semiperiodo:
Vin = 2/π Vmax
⇒ Pr > 1/2 Vz Id + 1/2 Vf Id
da cui il vincolo:
Vin
max
[V]
Vf [V]
Vz [V]
Rsens [Ω]
110
110
1
1
8,2
8,2
700
300
Id [A] ⇒ Pr > [W]
0,087
0,203
0,799
1,865
Come detto, le presenti rappresentano stime largamente per eccesso.
Il circuito esposto consente di acquisire il segnale e successivamento
elaborarlo via software, tuttavia l’elevato rapporto di partizione potrebbe
attenuare eccessivamente il segnale a bassi regimi di rotazione.
Potrebbe risultare utile allora “squadrare” il segnale ricavandone uno
digitale, TTL compatibile (v. par. 1.3.8 NI6120-Note).
Cap. 3 – L’Apparato Sperimentale
62
3.3.2 Lo squadratore.
Volendo ricavare un segnale “digitale” dai pickup: la tensione
d’ingresso, superando la soglia VBE, porta in conduzione il transistor,
commutando il livello logico in uscita. Il diodo di clipping D2 impedisce
che la tensione sulla base possa superare i limiti consentiti.
+5V
+
VBE
Rc
Vin
+
R1
+5V
Vout
Rb
-
-
D2
Dimensioniamo la resistenza Rc per fissare la Ic max e, qualitativamente
(non essendo in condizioni statiche), la Ib:
⇒ Ib ≅ Ic / hFE
Ic = (Vcc-VCEsat) / Rc
Vcc [V] VCEsat [V] Icmax [mA]
hFE ⇒ Rc > [Ω] ⇒ Pr > [W] ⇒ Ibmax [μA]
5
0,7
5
160
860
0,022
31
5
0,7
20
160
215
0,086
125
Dimensioniamo la resistenza Rb per fissare la Ib max:
Ib = (Vz-VBE) / Rb
⇒ Rb > (Vz-VBE) / Ib max
Vz [V]
Vbe [V]
Ibmax [μA]
⇒ Rb > [Ω]
⇒ Pr > [W]
4,7
4,7
1,2
1,2
31
125
112000
28000
0,00010938
0,0004375
Cap. 3 – L’Apparato Sperimentale
63
Dimensioniamo R1 per determinare la Isens max, avremo due condizioni
rispettivamenti per i casi Vin>0 e Vin<0:
Isens = Id + Ib = (Vin-Vz) / R1
⇒ R1 > (Vin-Vz) / Isens
Isens = Id = (Vin-Vf) / R1
⇒ R1 > (Vin-Vf) / Isens
avendo trascurato (worst case) la Rsens; la seconda è certamente più
stringente.
Vin [V] Vf [V] Isens [A] Ibmax [μA] ⇒ Pr > [W] ⇒ R1 > [Ω] ⇒ Pr > [W]
110
110
1
1
0,006
0,006
31
125
0,028
0,028
18167
18167
0,654
0,654
Il primo Pr esprime una stima per eccesso per D2, il secondo è relativo
ad R1.
Cap. 3 – L’Apparato Sperimentale
64
3.4 Prove Sperimentali.
3.4.1 Effetti del Condizionamento.
18k
1W
28k
1/4W
4V7
1W
+5V
1,2k
1/4W
BC33725W30
In figura, il dimensionamento del circuito
impiegato per le prove.
Lo scan rate per le acquisizioni è stato
impostato a 250k Sample/sec (1/Sps=4μsec).
Il grafico è relativo ai segnali squadrati ottenuti a 2237 RPM Motore
(4,437kHz).
Lo schema a transistor e resistenze (peraltro di elevato valore per le
elevate tensioni in gioco) limita intrinsecamente la ripidità, pur
sufficientemente (tf≅2μsec) ai fini della prova, dei fronti. Inoltre trise e tfall
sono influenzati dagli RPM da cui dipende l’ampiezza del segnale dei
pick-up.
Cap. 3 – L’Apparato Sperimentale
65
3.4.2 Risultati.
Le prove sono relative a rampe di carico a tre velocità diverse variando
la tensione applicata al martinetto da 5,45 a 5,65 a 5,45 con un passo pari
a 0,01V/sec, con una variazione presunta di coppia pari a 88Nm.
Ritardo
1560
1540
1520
2237
1500
2916
1480
4200
1460
1440
1420
0
20
40
60
80
100
120
Il grafico ottenuto misurando il ritardo e utilizzando i valori di Rigidezza
Torsionale calcolati valida il metodo in quanto le tre rampe sono
all’incirca sovrapponibili, seguono andamenti rettilinei, inoltre, a parte
un “termine noto”, la variazione tra gli stazionari risulta essere all’incirca
pari ad 80Nm.
Aree Sovrapposizione
0,58
0,575
0,57
0,565
2237
0,56
2916
0,555
4200
0,55
0,545
0,54
0,535
0
20
40
60
80
100
120
Cap. 3 – L’Apparato Sperimentale
66
Anche il metodo della sovrapposizione delle aree fornisce buoni risultati
ma soffre l’inconveniente di fattori di scala non immediatamente
individuabili, come nel caso precedente.
3.4.3 Problematiche e miglioramenti
L’analisi dei risultati induce a seguire il metodo del ritardo soprattutto
per la semplicità della formule che legano i fattori di scala agli RPM. La
variabilità aumentata a 4200RPM deriva dalla minore precisione con cui
si è in grado, a parità di scan rate, di misurare gli intervalli di tempo
rispetto ai regimi di rotazione inferiori. Ciò suggerisce di aumentare lo
scan rate e modificare il circuito squadratore in modo da rendere la
ripidità dei fronti indipendente dagli RPM e sufficientemente elevata.
La conseguente capacità di risolvere intervalli temporali inferiori
consentirebbe, allora, di effettuare misurazioni su un tratto molto più
breve della catena cinematica, magari su uno stesso albero in modo da
permettere un calcolo più accurato ed indipendente dal tipo di Test
Articles montate della Rigidezza Torsionale ed ovviare ai fenomeni di
martellamento dei TA a bassi valori di coppia e di recupero dei giochi a
seconda dei versi di rotazione e coppia.
Cap. 4 – Asset di prova alternativi
67
4.
Asset di prova alternativi.
4.1 Il primo asset di prova.
Seguendo le indicazioni evinte (v.3.4.3) dalle prove sperimentali, i test
successivi sono stati effettuati su un tratto di catena cinematica
comprendente un solo albero o parte di esso.
Nel primo asset è stato preso in considerazione l’albero 2 poiché,
essendo più lungo rispetto all’albero 1, offre un coefficiente torsionale
minore.
4.1.1 I principi di funzionamento.
I pickup sono stati montati rispettivamente sulla Z39 (pickup2) e sulla
Z80 (pickup1). Si è misurato il ritardo tra ciascun dente della Z39 ed il
dente della Z80 che, in ordine di apparizione, immediatamente lo
seguiva. Non essendo il rapporto 80/39 un numero intero, la durata degli
intervalli risulta diversa da dente a dente. Può accadere che due denti
risultino talmente vicini che la discretizzazione temporale introdotta dal
campionamento, non essendo sincrono con la Z39, faccia apparire in un
caso che il dente della Z39 preceda quello della Z80, viceversa nell’altro;
la durata dell’intervallo apparirà rispettivamente minima o massima.
Sarà sufficiente, allora, discriminare i denti per i quali la variabilità degli
intervalli è eccessivamente elevata (nel caso in figura 7 e 26) e non
processarli.
Cap. 4 – Asset di prova alternativi
68
4.1.2 Il Trigger di Schmitt.
Al fine di migliorare la pendenza del segnale squadrato è stato impiegato
un inverter con ingressi a Trigger di Schmitt. Si è scelto di montarlo in
cascata al circuito squadratore precedentemente illustrato al fine di
mantenere la tensione di soglia idealmente a 0,7V piuttosto che a 2,5V: il
tempo necessario a raggiungerla dipende dalla pendenza del segnale (v.
2.2.2.5) quindi mantenendola bassa si minimizza l’errore rispetto alla
posizione angolare in corrispondenza della quale si ha l’impulso. Questo
può tornar utile se si adottano particolari metodiche di misura, inoltre
consente di impiegare il circuito anche con segnali di ampiezza limitata.
Il doppio stadio aumenta, inoltre, il grado di protezione rispetto alla
scheda di acuisizione.
28k
1/4W
4V7
1W
+5V
+5V
1,2k
1/4W
Vcc
BC33725W30
4V7
1W
GND
SN74HC 14N
18k
1W
4.1.2.1 SN74HC14N: Specifiche.
E’ un dispositivo CMOS con ingressi a Trigger di Schmitt che contiene
sei inverter indipendenti che effettuano la funzione booleana Y=Ā in
logica positiva. Caratteristiche salienti sono:
-
Ampio range operativo di alimentazione: Vcc da 2V a 6V
Ciascuna uscita può pilotare fino a 10 ingressi LSTTL
Basso consumo di potenza: 20µA max Icc
tpd tipico pari a 11ns
può gestire fino a ±4mA per ciascuna uscita a 5V
Basse correnti d’ingresso: 1µA max
E’ dotato di protezioni in ingresso ed uscita che consentono di eccedere i
limiti di tensione [0..Vcc] purchè le correnti vengano limitate a:
- Input clamp current, Iik (Vi<0 or Vi>Vcc): ±20mA
- Output clamp current, Iok (Vo<0 or Vo>Vcc): ±20mA
Cap. 4 – Asset di prova alternativi
69
Viene raccomandato, ai fini del corretto funzionamento del dispositivo,
di fissare anche gli ingressi non utilizzati ad un appropriato livello logico
(0 o Vcc). Le uscite non utilizzate devono essere lasciate “aperte”.
Parameter
Test Conditions
VT+
VT-
VT+ - VT-
IOH=-20µA
VOH
VI=VIH or VIL
IOH=-4mA
IOH=-5,2mA
IOL=20µA
VOL
VI=VIH or VIL
IOL=4mA
IOL=5,2mA
CI
tpd
tt
CL=50pF
From (Input)
To (Output)
A
Y
CL=50pF
To (Output)
Y
Vcc
2V
4,5V
6V
2V
4,5V
6V
2V
4,5V
6V
2V
4,5V
6V
4,5V
6V
2V
4,5V
6V
4,5V
6V
2V to 6V
2V
4,5V
6V
2V
4,5V
6V
TA=25°C
SN74HC14
Min
Typ
Max
Min
Max
0,7
1,55
2,1
0,3
0,9
1,2
0,2
0,4
0,5
1,9
4,4
5,9
3,98
5,48
1,2
2,5
3,3
0,6
1,6
2
0,6
0,9
1,3
1,998
4,499
5,999
4,3
5,8
0,002
0,001
0,001
0,17
0,15
3
55
12
11
38
8
6
1,5
3,15
4,2
1
2,45
3,2
1,2
2,1
2,5
0,7
1,55
2,1
0,3
0,9
1,2
0,2
0,4
0,5
1,9
4,4
5,9
3,84
5,34
1,5
3,15
4,2
1
2,45
3,2
1,2
2,1
2,5
0,1
0,1
0,1
0,26
0,26
10
125
25
21
75
15
13
Unit
V
V
V
V
0,1
0,1
0,1
0,33
0,33
10
155
31
26
95
19
16
V
pF
ns
ns
Cap. 4 – Asset di prova alternativi
70
Risulta particolarmente utile per “squadrare” segnali caratterizzati da
rise, fall time troppo lenti. Inoltre, l’isteresi che caratteriza il trigger di
schmitt, lo rende adatto all’impiego in ambienti rumorosi.
4.1.2.2 Bibliografia.
- SN54HC14, SN74HC14 Hex Schmitt Trigger Inverters,
www.ti.com
- Designing with logic, www.ti.com
- Implications of slow or floating CMOS input, www.ti.com
- SN54/74HCT CMOS Logic Family Applications and Restrictions,
www.ti.com
Cap. 4 – Asset di prova alternativi
71
4.1.3 Prove sperimentali.
Le condizioni di prova sono le stesse della precedente (v. 3.4.2) eccezion
fatta per il modificato circuito squadratore ed il coefficiente di Rigidezza
Torsionale. Essendo il tratto di catena cinematica interessato più breve
ci si aspetta che esso risulti aumentato ed infatti empiricamente si è
trovato che, moltiplicandolo per un fattore 2,8, le escursioni tra gli
stazionari risultano del tutto analoghe a quanto trovato in precedenza,
validando, ancora una volta, il metodo.
La scala dei tempi è in secondi, in ordinata la coppia è in Nm.
4.1.4 Problematiche e miglioramenti.
La differenza, evidente, rispetto al caso precedente è la presenza di un
“termine noto”, variabile con la velocità, inaspettato. Per compensarlo si
è provato ad aumentare il valore dei ritardi misurati di una unità, in altri
termini introducendo un ritardo costante tra ciascun impulso della Z39
ed il corrispondente della Z80 pari a 1/Sps (nel caso 4µsec).
Cap. 4 – Asset di prova alternativi
72
La simulazione mostra come la compensazione risulti assolutamente
efficace. Sono in corso approfondimenti tesi a individuare l’origine del
problema. Gli andamenti rettilinei dei transitori e degli stazionari
suggeriscono da un lato che il metodo è già in grado, in 1 solo sec, di
effettuare una misura piuttosto precisa, dall’altro che in condizioni di
funzionamento tipiche del banco, cioè stazionarie, è possibile aumentare
la precisione del metodo semplicemente adottando un filtro a media
mobile, con una finestra ampia, peraltro, pochi secondi.
Cap. 4 – Asset di prova alternativi
73
4.2 Il secondo asset di prova.
Gli incoraggianti risultati ottenuti hanno suggerito la possibilità di
effettuare misurazioni su un tratto di catena cinematica ancora più breve.
4.2.1 I principi di funzionamento.
L’albero torsiometrico ed il dummy frapposti tra i giunti a lamelle sono
ad essi collegati mediante flange a 12 bulloni, rettificati, a testa
esagonale. Sfruttando una “finestra” del carter superiore in
corrispondenza del dummy, sono stati montati due pickup per “leggere”
il passaggio delle teste delle viti e misurare, in definitiva, la torsione del
dummy.
4.2.2 Prove sperimentali.
Le condizioni di
prova sono le stesse
della precedente (v.
4.1.3) eccezion fatta
per l’assenza del
circuito squadratore
e lo scan rate,
impostato a 800k
Sample/sec. I grafici
mettono a confronto
gli
andamenti
rispettivamente
a
4200 RPM e 2237
RPM.
Come già osservato in precedenza (v. 2.2.1.7) il segnale che si ottiene
risulta qualitativamente e quantitativamente modesto. L’acquisizione del
segnale “grezzo” consente, quindi, un maggior controllo degli effetti
della “squadratura”, realizzata via software implemantando un trigger di
Schmitt con valori di soglia +0,5V e -0,5V. L’aumento dello scan rate è
giustificato dalla previsione di effetti della torsione molto ridotti rispetto
al caso precedente.
Cap. 4 – Asset di prova alternativi
74
I grafici alle due velocità inferiori mostrano andamenti piuttosto
rettilinei. Alla velocità più alta compaiono “spikes” di un certo rilievo.
Cap. 4 – Asset di prova alternativi
75
4.2.3 Problematiche e miglioramenti.
Si osserva che i termini noti ma soprattutto le escursioni tra gli stazionari
risultano dipendenti dall’RPM. In tali condizioni apparirebbero non
significative considerazioni sul coefficiente di Rigidezza Torsionale e
comunque è da sottolineare la semplicità con cui potrebbe essere
calcolato, conoscendo le carateristiche del dummy.
Questo asset richiama fortemente il primo caso analizzato (2.2.2.7). Al
fine di migliorare i segnali e superare i limiti evidenziati si potrebbero
munire le flange di corone dentate o praticare opportune scanalature così
da ottenere “riferimenti” molto più precisi ai fini della lettura.
La strumentazione di acquisizione risulta assolutamente adeguata per
fornire risoluzioni opportune e consentire un impiego in tempo reale del
sistema.
Il metodo risulta particolarmente vantaggioso perché, in ultima analisi,
consentirebbe di realizzare un dispositivo (da cui “torsiometro
alternativo”) semplice, economico, compatto, affidabile e facilmente
“esportabile” su altri macchinari quali torni, banchi prova, ecc.
Cap. 5 – Prospettive
76
5.
Prospettive.
Questo capitolo si propone di fornire suggerimenti circa sensori
innovativi da impiegare sul banco e defire le specifiche per il
“Torsiometro Alternativo”.
5.1 La sensoristica del banco.
Dall’analisi del banco si evincono numerose indicazioni circa futuribili
sistemi di monitoraggio delle vibrazioni.
E’ fondamentale porre i sensori il più vicino possibile alla fonte di
vibrazioni, per limitare al massimo le interferenze di altre sorgenti, nel
caso specifico dovremmo porli sulle ruote dentate.
Ciò pone evidentemente delle imprescindibili specifiche:
- wireless;
- dimensioni e massa limitate;
- in grado di sopravvivere ad accelerazioni dell’ordine di ~ 200 G e
temperature ~ 250°C;
- sigillati ermeticamente;
- banda passante ~ 50 kHz.
Nell’ottica di impiegare questi sistemi “a bordo” sarebbero auspicabili
anche le seguenti:
- batteryless;
- senza manutenzione;
- processing in tempo reale per la rivelazione di guasti incipienti.
La soluzione che appare più funzionale è la seguente:
- un sensore wireless, batteryless, semplice, robusto, economico,
affidabile e miniaturizzato
- un sistema di elaborazione basato su μcontrollore.
Cap. 5 – Prospettive
77
Considerato che, allo stato dell’arte, gli accelerometri di tipo MEMs
presentano grossi limiti di banda, per il sensore si pensa di verificare la
possibilità di integrare un accelerometro piezoelettrico in un Trasponder
SAW avendo entrambi lo stesso substrato.
5.2 Wireless Passive Saw Sensors.
5.2.1 Introduzione.
La tecnologia SAW viene sfruttata da oltre trent’anni per il trattamento
dei segnali analogici, con un produzione su larghissima scala. I filtri
SAW attualmente giocano un ruolo chiave nei sistemi di comunicazione
e consumer in genere, per le loro elevate prestazioni, ingombri ridotti ed
esatta riproducibilità, Queste caratteristiche, che li rendono ideali per
l’implementazione di sensori, congiuntamente alla diffusione dei
dispositivi SAW per i sistemi di identificazione wireless (ID-tags) ha
aperto nuove prospettive per la realizzazione, appunto, di sensori
wireless passivi che combinano le tecnologie dei sistemi sensoristici
SAW tradizionali basati sugli oscillatori con le tecniche di interrogazione
radio dei SAW ID-tags.
I dispositivi SAW (Surface Acoustic Wave) possono, insomma,
trasformarsi in sensori di grandezze “logistiche”, fisiche, chimiche o
biologiche come dati di identificazione, temperatura, pressione, coppia,
accelerazione, umidità, ecc., che non richiedono alcuna alimentazione
(passive) e possono essere interrogati in maniera wireless (SAW
trasponder); inoltre, sono maintenance free.
Per queste caratteristiche vengono vantaggiosamente impiegati su parti
in movimento o rotanti e in ambienti pericolosi quali aree contaminate o
in presenza di elevate tensioni, possono essere impiegati inoltre per
misure di tipo contactless in camere sotto vuoto spinto, annegati nel
calcestruzzo, a temperature elevate, in presenza di radiazioni ad elevata
energia, laddove cioè l’uso di sensori convenzionali risulterebbe
proibitivo o eccessivamente oneroso. I dispositivi standard hanno range
operativi da -196°C (azoto liquido) a più di 200°C, limite agevolmente
superabile adottando processi di fabbricazione, materiali e packaging
opportuni. Generalmente il raggio d’azione è tra i 3-10 m.
Cap. 5 – Prospettive
78
5.2.2 Principio di funzionamento.
I dispositivi SAW sono componenti microacustici speciali consistenti in
un substrato piezoelettrico (chip) e strutture metalliche come trasduttori
interdigitati (IDTs) e array di riflessione o accoppiamento, deposti sulla
sua superficie opportunamente lappata. La piezoelettricità fa sì che un
segnale elettromagnetico RF in ingresso all’antenna stimoli, mediante un
IDTs ad essa collegato, la propagazione di un’onda microacustica sulla
superficie del chip. Viceversa, un’onda SAW genererà una distribuzione
di carica nel IDTs, quindi dall’antenna verrà irradiato un segnale RF
d’uscita.
I dispositivi SAW per il trattamento di segnali analogici vengono
ermeticamente sigillati al fine di minimizzare le influenze di fattori
esterni quali umidità o stress meccanici. Invece, per poter essere
utilizzati come elementi attivi di sensori, i parametri fisici o chimici
prescelti devono poterne modificare le caratteristiche di propagazione o
riflessione. In molti casi ciò si traduce sia in una deformazione
meccanica del chip SAW che in una variazione della sua velocità di
propagazione. Alcuni parametri fisici, come la temperatura, alterano, ad
esempio, in maniera diretta detta velocità. Per la misura di proprietà
meccaniche quali pressione, forza, deformazione, accelerazione è
necessario equipaggiare il chip con packaging specifici ed adottare
montaggi opportuni. Altre grandezze, come concentrazioni di gas o
vapore, tensioni o campi magnetici, possono essere misurate
indirettamente, ricoprendo di uno strato sensibile specifico il chip. Nei
sistemi classici a sensori SAW, essi intervengono nell’anello di reazione
di un oscillatore modificandone la frequenza.
Nei sistemi in esame,
invece, il local radar
transceiver (TRx) interroga
il trasponder SAW (SAWt)
mediante un impulso a radio
frequenza (RF read-out
Burst).
Il SAWt capta una piccola porzione del segnale e risponde con un
segnale RF, a mo’ di eco radar, essendo passivo. Dall’ampiezza,
frequenza, fase e temporizzazione di questo segnale è possibile ricavare
informazioni circa il numero e le geometrie delle strutture di codifica,
oltre che le caratteristiche dei meccanismi di riflessione e propagazione
dell’onda SAW, che spesso sono direttamente legate all’effetto del
misurando sul sensore.
Cap. 5 – Prospettive
79
L’onda
microacustica
viene
immagazzinata e codificata secondo il
codice identificativo o la grandezza
d’interesse. L’immagazzinamento può
essere realizzato adottando una
configurazione risonante o una delay
line.
In questo secondo caso la codifica può
essere ottenuta sia mediante un
trasduttore codificato che un array di
riflettori, e determinerà il numero, la
posizione nel tempo e la fase degli
impulsi di risposta.
Se invece viene implementata una
struttura risonante, l’informazione verrà
codificata nel numero, frequenza
centrale e fase degli impulsi.
Il segnale microacustico codificato
verrà riconvertito in segnale elettrico
nell’IDT e trasmesso all’unità radar
TRx dall’antenna del trasponder come
segnale RF.
Grazie alla bassa velocità delle onde SAW, è possibile ottenere delay
time notevoli, dell’ordine di qualche microsecondo, anche con chip
piuttosto piccoli. Quindi, a frequenze del tipo VHF/UHF, le eco spurie,
risultato
della
propagazione
elettromagnetica multipath, risultano
già sufficientemente affievolite quando
la risposta del sensore arriva al TRx.
Quest’ultima può, quindi, essere
separata in maniera semplice dalle eco
spurie nel dominio del tempo. La
possibilità di evitare problemi di
intersymbol interference costituisce un
grande vantaggio dei sensori wireless
SAW rispetto agli altri sistemi di radio
link.
I transponder SAW passivi, insomma, accumulano e ritrasmettono
l’energia dell’impulso mediante il quale vengono interrogati, quindi non
richiedono alcuna alimentazione.
Cap. 5 – Prospettive
80
Le loro antenne possono essere dipoli, patch, slot o loop. Alle frequenze
VHF/UHF, l’attenuazione di inserzione Asaw del trasponder è dell’ordine
di 20-60dB, dipendentemente dalla frequenza di lavoro, dal tipo di
substrato e dal numero di riflettori.
La fase di lettura richiede solo qualche microsecondo, è possibile
ottenere un access rate superiore a 105/s, ciò ne consente l’impiego su
oggetti o veicoli in rapido movimento.
E’ possibile, quindi, che la distanza tra il radar TRx ed il transponder
SAW non sia nota a priori o sia addirittura variabile, quindi tipicamente
si effettuano test in differenti condizioni per valutare le differenti
risposte in termini di ampiezza, fase, frequenza e tempo di volo
(propagation time delay).
Poichè i SAW sono dispositivi passivi, privi di logica attiva a bordo, essi
non possono essere interrogati singolarmente. Per accedere a più di un
dispositivo saranno necessarie tecniche del tipo:
- FDMA(frequency division multiple access)
- TDMA(time division multiple access)
- CDMA(code division multiple access)
- SDMA(space division multiple access)
o combinazioni di esse.
Cap. 5 – Prospettive
81
5.2.3 Applicazioni.
Le applicazioni di dispositivi wireless passivi SAW sono innumerevoli
ed alcune già operative.
5.2.3.1 Sistemi di identificazione (fixed coded SAW ID tags).
Si riportano alcuni esempi significativi, riscontro di una diffusione
sempre crescente.
Trovano impiego nell’industria automobilistica in quelle che in gergo
vengono chiamate “saponette”.
In Norvegia vengono utilizzati per il pagamento del pedaggio
autostradale, in stazioni ad elevata automazione (è l’analogo del
Telepass in Italia).
In Germania, le poste tedesche li adottano come sistemi di
identificazione per i loro mezzi di trasporto ed i container.
Nella metropolitana di Monaco vengono impiegati per la identificazione
delle carrozze, vengono montati sulla fiancata ed operano nella banda a
2.45 GHz. Le unità di rilevamento sono poste lungo la rete ferroviaria,
vicino ai binari e collegate ad un computer centrale. Le pessime
condizioni operative dovute alla elevata intensità delle interferenze EM
su un ampio spettro costituiscono un severo banco di prova che dimostra
la totale immunità alle interferenze di tale sistema di identificazione.
5.2.3.2 Sensori di temperatura.
Il Niobato di Litio, LiNbO3, è il materiale ideale per realizzare sensori di
temperatura grazie ad un elevato TCD (Temperature Coefficient of
Delay) ed un alto fattore di accoppiamento elettro-acustico.
In un dispositivo con un intervallo temporale tra il primo e l’ultimo
riflettore di 4.55 us ed una frequenza centrale di 434MHz, un TCD
misurato di 85 ppm/°C ed una risoluzione di fase del transceiver di ± 1°,
con un opporturo SNR, è stato possibile ottenere una risoluzione di
0.02°C. Poichè una variazione di temperatura superiore a 12°C comporta
uno shift di fase maggiore di 360°, per misurare senza ambiguità la
temperatura in intervalli ampi sarà allora necessario utilizzare più
riflettori.
Sensori di questo tipo sono stati impiegati per monitorare la temperatura
di dischi freno di treni, dissipatori d’energia, palette di turbine,
pneumatici, o ancora, il monitoraggio della temperatura del rotore di un
motore elettrico da 11 kW, insomma situazioni nelle quali, per le
Cap. 5 – Prospettive
82
velocità di rotazione e le temperature sarebbe stato assolutamente
improponibile adottare soluzioni ad esempio di tipo slip-ring.
Presentano un comportamento piuttosto lineare su ampi intervalli di
temperatura e, fino a 200°C, è ancora possibile utilizzare le tecniche
standard di packaging ed interconnessione. Al di sopra di queste
temperature anche i materiali del “core” vanno in crisi, l’allumino,
impiegato per i contatti, resiste fino a 450°C, l’LiNbO3, per il substrato,
mantenuto tra i 400 ed i 500°C rimane stabile per diversi giorni.
Recentemente sono stati impiegati nuovi materiali che consentono di
raggiungere temperature fino ai 1000°C.
5.2.3.3 Sensori di pressione, accelerazione.
E’ possibile realizzare un sensore di pressione mediante un diaframma di
quarzo che si deforma sotto l’azione di una pressione. Perchè cio
avvenga è necessario che ci sia una pressione costante di riferimento
sulla faccia opposta, imposta realizzando una camera sigillata
ermeticamente accoppiando il diaframma ad un supporto anch’esso di
quarzo. Su tale faccia trova posto la
delay line che consente riflessioni
su un ampio spettro. Le due parti
sono incollate mediante un adesivo
epossidico. Essendo realizzate
entrambe dello stesso materiale
risultano minimizzati gli stress
termici tra le parti accoppiate, quindi non si avranno fenomeni di crosssensitività alla temperatura. Si riescono ad ottenere risoluzioni dell’1%
rispetto al valore limite. In un dispositivo progettato per un range da 0 a
250kPa, entrambe le parti presentano uno spessore di 500 μm. Si osserva
che la velocità di fase, nelle sezioni sottoposte a trazione, risulta minore,
in quelle sottoposte a compressione, maggiore. Risultano necessari
almeno tre riflettori, ma nella realizzazione in esame ne sono stati
impiegati 10 per incrementare la risoluzione. L’effetto dalla temperatura
risulta abbastanza trascurabile, almeno su un range -20°÷100°C. A 250
kPa il diaframma tocca il supporto, ciò costituisce una protezione da
sovraccarichi.
Sono stati realizzati, in questo modo, anche sensori di pressione per
pneumatici.
Cap. 5 – Prospettive
83
Mediante una massa sismica posta
all’estremità di una struttura flessibile a
sbalzo è invece possibile realizzare un
accelerometro.
5.2.3.4 Sensori di coppia.
Mediante SAW è possibile implementare anche sensori di coppia,
applicabili, ad esempio, ad alberi di trasmissione. Ricalcando il principio
di funzionamento degli strain gauge resistivi, in maniera indiretta
sfruttano le tensioni e le deformazioni meccaniche della struttura.
E’ stato realizzato un dispositivo che consente sia misure di temperatura
che di coppia, a tal fine è stato utilizzato per il substrato l’LiNbO3
caratterizzato al contempo da un elevato coefficiente di accoppiamento
elettromeccanico e da una risposta lineare alla temperatura.
E’ costituito da una delay line con 5 riflettori. Il segnale riflesso sul
primo riflettore presenta un delay time di 1 μs. Gli altri quattro sono
separati da 0.125 μs, 0.275 μs, 1.250 μs e 4500 μs rispettivamente. Due
sensori vengono posti in un medesimo alloggiamento con un angolo
relativo di 90°. Un terzo dispositivo presenta, su uno stesso chip, tre
SAW path, orientati in tre direzioni differenti, che si sovrappongono: gli
effetti di eventuali differenze di temperatura presenti lungo ciascun path
vengono, quindi, minimizzate, incrementando significativamente
l’accuratezza della misura.
Il sensore è stato provato su un albero cavo, sottoposto a cicli di
riscaldamento e raffreddamento. La coppia di carico è stata generata
mediante pesi agganciati ad un manovellismo applicato all’albero.
Seguendo specifiche di progetto tipiche per alberi in acciaio, la coppia
nominale, per definizione, causa una tensione tangenziale di 35 N/mm2
al raggio massimo dell’albero. La tensione normale nelle direzioni a
±45° rispetto all’asse dell’albero alla coppia nominale è ε±45°=±2.2*10-4.
L’albero in esame ha un diametro di 20 mm e la coppia nominale di ∼
50Nm è stata esercitata mediante un peso da 10Kg su un braccio lungo
0,5m.
Nel caso, il sensore è provvisto di packaging ed assicurato all’albero
mediante collarini. Sono possibili altre soluzioni, come, ad esempio,
Cap. 5 – Prospettive
84
fissare direttamente il cristallo del SAW su una spianatura dell’albero,
che consentono di migliorare la trasmissione dello sforzo al sensore,
tuttavia non sono indicate per applicazioni sensoristiche su motori e
macchinari in un ambito produttivo.
Per ottenere un ampio range dinamico che consentisse misure
contemporanee di coppia e temperatura sono state implementate diverse
delay line di differente lunghezza. Il delay time più piccolo è di 0.025μs
e consente misure di fase senza ambiguità su un range di 490°C. Tuttavia
il setup dei test effettuati ha previsto un range ridotto, da 0 a 85°C. La
migliore risoluzione si ottiene sfruttando il delay time più grande, di
4.5μs. Per i test, si è adottata una risoluzione di fase di 0.1°, consentendo
così una risoluzione per la coppia migliore dell’1% del valore nominale.
L’esperimento prevede che la fase dei segnali RF riflessi sia misurata per
delay line orientate a ±45° rispetto all’asse dell’albero. La somma e la
differenza delle fasi forniscono, rispettivamente, la misura della
temperatura e della coppia.
In figura è descritto come i segnali
varino con la temperatura,
mantenendo la coppia costante.
Concordemente alle attese, la
somma delle fasi mostra una forte
dipendenza dalla temperatura, la
differenza, invece, lievi variazioni,
traducibili in una variazione del
valore della coppia pari all’1% del
valore nominale. L’accuratezza
può
essere
incrementata
utilizzando il segnale relativo alla
temperatura simultaneamente misurato.
A temperatura costante, la coppia
viene variata in un range paria a
±1.6 il valore nominale (±1.6Mn). I
risultati sono mostrati in figura. La
differenza di fase misurata è
racchiusa in un intervallo ±25°. La
somma delle fasi, come una misura
di temperatura, è all’incirca
costante,
le
fluttuazioni
rappresenterebbero una variazione
apparente di ±2°C. Nel caso si
abbia bisogno di valori di
Cap. 5 – Prospettive
85
temperatura più accurati, è possibile ottenerli valutando i valori di coppia
simultaneamente misurati.
I risultati riportati sono stati ottenuti sfruttando le delay line a 0.125 μs.
In molti casi la risoluzione così raggiungibile risulterà sufficiente
(qualche °C) per le misure di temperatura, ma non per quelle di coppia.
Incrementando il delay time a 4.5 μs, le fluttuazioni del segnale verranno
ridotte proporzionalmente, e la risoluzione per la coppia aumenterà
all’incirca allo 0.2% del valore nominale.
In figura, vengono mostrati i
risultato
dell’esperimento
che
effettivamente dimostra la possibilità
di effettuare misure simultanee di
coppia e temperatura: viene ricavata
la caratteristica temperatura-coppia
del sensore, spazzando un range di
temperatura di 0÷75°C e di coppia 1.5÷1.5 Mn. La risposta di coppia
risulta chiaramente dipendente dalla
temperatura; ma, il dato significativo
è che, comunque, c’è una relazione
priva di ambiguità tra la differenza di fase misurata e la coppia a tutte le
temperature. La deviazione dell’andamento delle funzioni ricavate dalla
linearità è lieve, quindi è possibile ricavare un’approssimazione
polinomiale del terz’ordine (in M e T) che consente un’accuratezza,
rispetto alle caratteristiche misurate, dell’1%.
Sul mercato sono già presenti implementazioni che ricalcano
strettamente questo schema.
5.2.3.5 Risoluzioni tipiche.
Misurando
identificazione
temperatura
grandezze meccaniche
(pressione, coppia,
accelerazione..)
distanza
posizione relativa
posizione angolare
Effetto fisico
analisi del segnale
variazione di velocità
dalla SAW
variazione delle costanti
elastiche
delay del segnale
effetto Doppler
effetto Doppler
Risoluzione
32 Bit
0.1 K
1% del full scale
20 cm
2 cm
3°
Cap. 5 – Prospettive
86
5.2.4 Bibliografia.
- L. Reindl, "Wireless Passive SAW Identification Marks and
Sensors", in Proc. of the 2nd Int. Symp. Acoustic Wave Devices
for Future Mobile Communication Systems, Chiba Univ. 3rd niv.
3rd- 5th March, 2004
- Container logistics, www.baumerident.com
- (SAW) Torque Sensor Technology, www.honeywell.com
- L. Reindl, G. Scholl, T. Ostertag, H. Scherr, U. Wolff, F. Schmidt,
"Theory and application of passive SAW radio transponders as
sensors", IEEE Transactions on UFFC, Vol. 45, No. 5, Sep. 1998,
pp. 1281-1292
- F. Schmidt, O. Sczesny, L. Reindl, V. Magori, "Remote sensing of
physical parameters by means of passive surface acoustic wave
devices (‘ID TAG’)", in Proc. of the 1994 IEEE Ultrasonics
Symp., pp. 589-592
- Technical Research Centre of Finland & Partners, “Intelligent
Tyre Systems – State of the Art and Potential Technologies”,
APOLLO Consortium
- A. Stelzer, S. Schuster, S. Scheiblhofer, "Redout Unit for Wireless
SAW Sensors and ID-Tags", in Proc. of the 2nd Int. Symp.
Acoustic Wave Devices for Future Mobile Communication
Systems, Chiba Univ. 3rd niv. 3rd- 5th March, 2004
- G. Bruckner, R. Hauser, A. Stelzer, L. Maurer, R. Teichmann, J.
Biniasch, L. Reindl, “High temperature stable SAW based tagging
system for identifying a pressure sensor”, Proc. 2003 IEEE Freq.
Contrl. Symp., 2003
- L. Reindl, R. Steindl, Ch. Hausleitner, A. Pohl, G. Scholl,
“Wireless passive radio sensors”, SENSOR 2001, Proceedings
SENSOR ´2001, Vol. 1, 2001, pp. 331-336
- A. Pohl, "A Review of wireless SAW Sensors", IEEE Transactions
on UFFC, Vol. 47, No. 2, March. 2000, pp. 317-332
- A. Pohl, R. Steindl, L. Reindl, “A new generation of passive radio
requestable SAW sensors for ultrafast measurements”, Proc. 16th
IEEE Instrumentation Measurement Technology Conf., IMTC/99,
1999, pp. 1728-1733
- L. Reindl, R. Steindl, A. Pohl, J. Hornsteiner, E. Riha, F. Seifert,
“Passive SAW sensors for temperature and other measurands”,
Proc. Tempmeko 99, Netherlands, pp. 424-429
- A. Pohl, R. Steindl, L. Reindl, “The ’Intelligent Tire’ utilizing
Passive SAW Sensors - Measurement of Tire Friction“, IEEE
Cap. 5 – Prospettive
-
-
87
Transaction on Instrumentation and Measurement, Vol. 48, No. 6,
Dec. 1999, pp. 1041-1046
A. Pohl, R. Steindl, L. Reindl, “Measurements of vibration and
acceleration utilizing SAW sensors“, SENSOR'99 Vol.2,
Nürnberg, Germany, 1999, pp. 53-58
G. Scholl, F. Schmidt, T. Ostertag, L. Reindl, H. Scherr, U. Wolff,
“Wireless passive SAW sensor systems for industrial and domestic
applications“, Proc. 1998 IEEE Frequency Control Symp.,
pp.595-601
A. Pohl, G. Ostermayer, L. Reindl, F. Seifert, “Monitoring the tire
pressure at cars using passive SAW sensors”, in Proc. IEEE
Ultrason.Symp., Toronto, pp. 471-474, 1997
G. Ostermayer, A. Pohl, L. Reindl, F. Seifert, “Multiple Access to
SAW Sensors Using Matched Filter Properties”, Proc. IEEE
Ultrasonics Symposium, Toronto, 1997, pp. 339-342
L. Reindl, G. Scholl, T. Ostertag, C. C. W. Ruppel, W.-E. Bulst,
F.Seifert, “SAW devices as wireless passive sensors”, in Proc. of
the 1996 IEEE Ultrasonics Symp., pp. 363-367
Cap. 5 – Prospettive
88
5.3 Il Torsiometro Alternativo.
L’analisi teorica e le prove sperimentali condotte mostrano come sia
effettivamente possibile implementare sul banco prova un sistema di
rilevamento della coppia basato sulla misura della torsione di un albero.
Numerose le indicazioni di tipo qualitativo emerse:
2.4.1.4: considerare un tratto della catena cinematica insistente su uno
stesso albero in modo da permettere un calcolo più accurato ed
indipendente dal tipo di Test Articles montate della Rigidezza Torsionale
ed ovviare ai fenomeni di martellamento dei TA a bassi valori di coppia
e di recupero dei giochi a seconda dei versi di rotazione e coppia
2.4.1.5: evitare il sampling multiplexato
2.4.1.7: evitare di utilizzare come riferimenti di lettura per i pickup teste
di viti. Il loro profilo, specie per le “brugole”, non è sufficientemente
netto, squadrato, introducendo nella forma d’onda delle “gobbe”. Dopo
essere state serrate, inoltre, gli esagoni risultano ruotati in posizioni
diverse. Infine, le posizioni dei fori non sempre risultano angolarmente
equispaziate.
2.4.2.7: come riferimenti possono essere utilizzati indifferentemente
cave o dentelli purchè abbiano profili estremamente netti. Oltre che sulla
forma, ciò incide sull’ampiezza picco-picco del segnale. Fronti ripidi e
assenza di “gobbe” secondarie che potrebbero indurre equivoci consente
di contenere il peso computazionale degli algoritmi per la
determinazione del punto caratteristico.
3.1: disporre un numero dispari di riferimenti così da facilitare un
campionamento asincrono
nell’ottica di mantenere risoluzioni
accetabili, pur utilizzando frequenze di acquisizione ragionevoli,
sfruttando le incertezze sulle misure derivanti dalla discretizzazione
temporale, effettuando medie su un numero sufficientemente elevato di
campioni.
3.2.1.4: utilizzare un sensore il cui pole-tip sia adeguato alla forma ed
alle dimensioni dei riferimenti.
3.4.2: adottare il metodo del ritardo.
Cap. 5 – Prospettive
89
3.4.3: utilizzare un circuito squadratore per l’adeguamento dei livelli di
tensione.
4.1.1: utilizzare uno stesso numero di riferimenti ma sfalsati di un angolo
almeno pari alla massima torsione prevista.
4.1.2: adottare un dispositivo squadratore a CMOS, purchè il segnale
abbia un’ampiezza sufficientemente elevata.
4.1.4: in condizioni stazionarie, adottare un filtraggio a media mobile
Cap. 5 – Prospettive
90
5.3.1 I riferimenti.
La soluzione più semplice ed efficace appare rilevare la torsione del
dummy. Si pensa di praticare sul bordo delle flange 39 tacche.
Le dimensioni delle tacche
sono
state
determinate
sperimentalmente utilizzando
come sensori i pickup
adoperati per i segnali
tachimetrici.
La simmetria circolare evita
sbilanciamenti, gli ingombri
risultano ridottissimi.
I riferimenti
sfalsati di:
sono
stati
360/(39*2) ≅ 4,61°
5.3.2 I sensori.
Le temperature, le vibrazioni e la presenza di olio hanno impedito l’uso
di sensori ottici. La necessità di alimentarli ha, invece, sfavorito la
candidatura di sensori digitali.
Le doti già evidenziate (v. 3.2.1) e la possibilità di “squadrarli” in
maniera egregia (v. App.C) hanno, definitivamente, fatto ricadere la
scelta sui Pickup a Riluttanza Magnetica Variabile, sensori analogici,
passivi.
Al fine di argomentare ulteriormente la scelta, può esere utile
confrontare le caratteristiche tecniche di alcuni sensori di questo tipo con
altri di due tipologie differenti, tutti disponibili a catalogo (v. 5.3.2.5).
Cap. 5 – Prospettive
91
5.3.2.1 Trasduttori magnetici ad uscita analogica.
Produttore:
TSI – Trasducer Systems, Inc.
Standard
Diametro del corpo
Lunghezza
Filetto
Resistenza bobina
Induttanza
Uscita picco/picco
Collegamento
Uscita elevata
Diametro del corpo
Lunghezza
Filetto
Resistenza bobina
Induttanza
Uscita picco/picco
Collegamento
Robusto
Diametro del corpo
Lunghezza
Filetto
Resistenza bobina
Induttanza
Uscita picco/picco
Collegamento
6,35mm
22mm
¼, 28 UNF, 2A
130Ω ± 10%
12mH ± 10%
10V
Precablato, 600mm, rosso, nero
9,53mm
33mm
3/8, 24 UNF, 2A
340Ω ± 20%
64mH ± 20%
60V
Precablato, 150mm, bianco, nero
15,88mm
57,3mm (escluso il connettore di collegamento)
5/8, 18 UNF, 2°
1200Ω ± 20%
460mH ± 20%
190V
Connettore MS 3101 A 10SL 4P
Nota: con un piccolo traferro o ad una elevata velocità il lettore robusto deve essere collegato ad un tachimetro
solo attraverso un divisore di tensione adeguato.
Nota: la tensione d'uscita per questo trasduttore si riferisce ad una resistenza di carico di 100kΩ con un traferro di
0,005 pollici e un funzionamento a 20kHz. Questi valori si avvicinano al rilevamento con un traferro di 0,13mm su
un ingranaggio di 38mm di diametro con 30 denti e ruotante alla velocità di 13.000 giri/min. A condizioni diverse,
si ottengono altre uscite che vengono influenzate dalla composizione del materiale dei denti dell'ingranaggio.
In condizioni normali le uscite devono essere determinate eseguendo delle prove e tenendo presente i seguenti
punti:
- Usare il lettore con carichi ad alta impedenza
- Rispettando le regole di sicurezza, avvicinare il lettore il massimo possibile alle parti in movimento; distanze di
2,5mm sono del tutto normali
- Nel caso di un gruppo di ingranaggi posizionare il lettore su quello rotante alla velocità più elevata
Connettori standard e ad uscita elevata: polarità
all'avvicinarsi di materiale ferromagnetico: il
cavo rosso/bianco risulta positivo rispetto al
cavo nero
Connettori robusti: polarità all'avvicinarsi di
materiale ferromagnetico: il contatto B risulta
positivo rispetto al contatto A
Cap. 5 – Prospettive
92
5.3.2.2 Trasduttori magnetici ad uscita digitale.
Produttore:
TSI – Trasducer Systems, Inc.
Standard
Tensione di esercizio (Vs)
Tensione di uscita (Vo)
Resistenza del carico (RL)
Tempo di salita di uscita (tr)
Tempo di discesa di uscita (tf)
Temperatura di funzionamento
Combinazioni Surface speed / Air gap
Output Zero Level
Interference Rejection
+5V ÷ +15V
Vo = Vs RL / (RL + 5000)
1kΩ min
1μs max
50ns max
da -25°C a +85°C
20 ips/0.010’’ ÷ 2500 ips/0.075’’
+0.150V max
Immune to power supply ripple of up to ±10% Vs at a
frequency up to 1 MHz
Nota:
Versione "attiva" dell'unità standard con un interruttore a semiconduttore integrato che genera un'uscita digitale,
compatibile con la maggioranza e sistemi logici, ogni qualvolta si verifichi un mutamento improvviso di un target di
materiale ferroso che passa davanti al polo.
I tempi di salita e discesa come anche l'ampiezza dell'impulso di uscita non dipendono dalle caratteristiche e dalla
velocità di cambiamento del campo magnetico.
L'unità è alloggiata in un involucro di acciaio.
- Red: Power Input
- Black: Common
- Green: Signal Out
AVVERTENZA: l'entrata d'alimentazione del dispositivo non è protetta dalla polarità inversa; un'inversione
momentanea dell'alimentazione causa guasti all'unità.
Cap. 5 – Prospettive
93
5.3.2.3 Trasduttori ad effetto Hall ad uscita digitale.
Produttore: Honeywell
I sensori della serie GT1 adottano un circuito integrato progettato
specificamente per l’effetto Hall, con condensatore discreto e magnete di
polarizzazione.
- Rivela materiali ferrosi
- Uscita digitale di tipo current sinking (open collector)
- Rapporto segnale/rumore migliore rispetto ai sensori a riluttanza
variabile, prestazioni eccellenti a bassa velocità, ampiezza del
segnale d’uscita indipendente dagli RPM
- Velocità operativa superiore ai 100kHz
- EMI resistant
- Protezioni contro le inversioni di polarità e sbalzi di tensione
GT1 Series
Electrical Characteristics
Supply Voltage
Supply Current
Output Voltage (output low)
Output Current (output high)
Rise time (10 to 90%)
Fall time (90 to 10%)
4.5 ÷ 24 V DC
10mA typ, 20mA max
0.4V max
10μA max leakage into sensor
15μsec max
1.0μsec max
Absolute Maximum Ratings
Supply Voltage (Vs)
Voltage externally applied to Output (output high)
Output Current
Operating Temperature Range
±30 V DC continuous
-0.5 ÷ +30V
40mA sinking
-40°C ÷ 150°C
Nota: tutti i valori sono stati misurati usando una resistenza di pull-up da 1KΩ
Reference Target Dimensions
Tooth Height
.200’’ (5.06mm) min
Tooth Width
.100’’ (2.54mm) min
Tooth Spacing
.400’’ (10.16mm) min
Target Thickness
.250’’ (6,35mm) min
- Red: Power Input
- Black: Common
- White: Signal Out
Cap. 5 – Prospettive
94
5.3.2.4 Confronto.
I trasduttori magnetici ad uscita digitale presentano, rispetto ai trasduttori
ad effetto Hall, tr e tf migliori ed un packaging più robusto. Inoltre,
grazie al pole tip, sono in grado di risovere target di dimensioni inferiori.
Sono sprovvisti, tuttavia, di protezioni per i circuiti interni e forniscono
prestazioni inferiori alla basse velocità.
Il vantaggio dei sensori digitali è di fornire un segnale le cui
caratteristiche (tr,tf, ampiezza) sono indipendenti dalla forma e velocità
del target. L’adozione di un circuito squadratore mira a recuperare queste
doti che vanno a sommarsi alla maggiore affidabilità e semplicità
d’installazione dei sensori analogici.
5.3.2.5 Bibliografia.
- www.rs-components.it
Cap. 5 – Prospettive
95
5.3.3 Il circuito squadratore.
Per limitare la latenza si è scelto uno schema a singolo stadio.
+
+5V
R1
SN74HC14N
GND
-
-
4V7
1W
Vout
Vin
+
Vcc
Dopo aver caratterizzato la risposta del sensore (v. 3.3.1) sarà possibile
dimensionare R1 secondo l’approccio già seguito (v. 3.3.2).
5.3.4 Il campionamento.
Ciascuna scheda (NI PXI 6120) consente l’acquisizione simultanea di
quattro canali analogici ed otto digitali. Lo squadratore, fornendo un
segnale TTL compatibile, suggerisce di acquisire i segnali condizionati
dei pickup mediante i canali digitali.
I risultati del secondo asset di prova evidenziano come sia necessario
impiegare la massima frequenza di campionamento (800kS/sec).
Cap. 5 – Prospettive
96
5.3.5 Il simulatore LabVIEW.
Il sistema di acquisizione trasferisce i dati al pc in blocchi di 800kS ogni
secondo e viene gestito da un VI LabVIEW. I dati vengono poi salvati su
hard-disk e successivamente masterizzati su DVD.
Primissima attività di tesi è stata la realizzazione di un ambiente di
simulazione in LabVIEW con il quale sono sti elaborati i dati di tutte le
prove presentate.
Il simulatore legge (I16bit reader) dal file ciascun blocco e lo passa al
motore di calcolo (RealTimeEngine), di fatto riproducendo la situazione
real time. Ciò consente, da un lato, di impiegare lo stesso motore anche
per i calcoli in tempo reale, dall’altro, di testarlo off-line. Per ciascuna
prova è sato realizzato un motore specifico.
Il motore individua la posizione, nel blocco in esame, di tutti gli impulsi
dei pickup1 e 2, quindi, divide il blocco in due parti. La prima conterrà i
dati relativi al numero (n) di giri completi compiuti dall’albero veloce,
ciòè, nel caso, a n*39 impulsi, e li processerà. I dati “avanzati”, relativi
all’ultimo giro, incompleto, verranno conservati in un buffer e posti in
testa al blocco successivo.
Questa modalità di funzionamento è comune a tutti i motori di calcolo.
Cap. 5 – Prospettive
97
Lo stile di programmazione a blocchi si è tradotto nell’uso di sub-VIs,
l’abitudine all’indentazione nella disposizione ordinata e lineare degli
elementi
5.3.6 Il Real Time Engine per il “Torsiometro Alternativo”.
Viene presentato, ora, il motore di calcolo per il “Torsiometro
Alternativo”, evidenziandone le specificità.
5.3.6.1 Il VI Trigger di Schmitt.
L’individuazione degli impulsi avviene in due fasi. Il VI in esame simula
il comportamento del trigger di Schmitt, effettuando una squadratura
software, fornendo in uscita un segnale “ideale”. Tale stadio è necessario
quando si effettua il campionamento dei pickup, anche se “squadrati”,
mediante i canali analogici, il cui risultato, per via dei disturbi, dei tempi
di salita e discesa, ecc. non potrà mai essere un’onda rettangolare
perfetta.
Cap. 5 – Prospettive
98
5.3.6.2 Il VI Pulse Detector.
Nella seconda fase viene implementato un filtro derivativo che individua
i fronti. Successivamente viene creata una lista con le posizioni, nel
blocco, di tutti i fronti in salita o discesa.
5.3.6.3 Il Motore di Calcolo.
I due VI precedenti sono contenuti nel VI Real Time Engine. Individuata
la posizione degli impulsi si applica il metodo del ritardo. Viene
misurato il ritardo tra ciascun impulso del pickup2 e l’impulso del
pickup1 che, in ordine di apparizione, immediatamente lo segue.
I dati vengono, poi, eventualmente corretti, controllati e opportunamente
scalati e mediati.
Cap. 5 – Prospettive
99
5.4 Sistema Stand Alone.
La prosecuzione naturale del progetto potrebbe essere la realizzazione di
un sistema stand alone a microcontrollore: in questa sede si intende
proporne un’idea di massima, a livello hardware e firmware.
5.4.1 Hardware.
Viene preso come riferimento il µcontrollore Atmel ATmega8515 le cui
caratteristiche salienti, ai fini del progetto, sono:
- Microcontrollore ad 8-bit con architettura AVR ad alte prestazioni
e basso consumo
• Throughput superiore a 16 MIPS@16 MHZ
• Moltiplicatore
- Memorie Dati e Programma non-volatili
• 8 KB Memoria Flash programmabile integrata
Endurance: 1000 cicli di scrittura/cancellazione
• 512 Byte di SRAM integrata
- Strutture a contorno
• 1 Timer/Contatore a 8-bit con prescaler dedicato e Compare
Mode
• 1 Timer/Contatore a 16-bit con prescaler dedicato, Compare
Mode e Capture Mode
- Caratteristiche speciali
• 3 Sorgenti d’interruzione esterne
- Alimentazione
• 4,5 ÷ 5,5 V
I pickup, utilizzati come
sorgenti
d’interruzione,
forniscono al contatore,
per misurare i ritardi, i
comandi di start e stop. I
dati vengono, quindi,
presentati all’utente.
Si noti come la velocità massima del contatore risuti venti volte
superiore alla massima frequenza del sistema d’acquisizione.
Cap. 5 – Prospettive
100
5.4.2 Il firmware.
Il diagramma a blocchi descrive una possibile
firmware.
Il primo blocco
microcontrollore.
(Setup)
è
dedicato
organizzazione del
all’inizializzazione
del
Il secondo contiene il Main Program, che controlla le funzionalità gestite
a controllo di programma (ad esempio l’interfaccia utente).
Il terzo è costituto dalle routine associate alle richieste d’interrupt
abilitate: la loro esecuzione interrompe il flusso del programma
principale, ripristinandolo, al termine, dal punto d’interruzione. Tra di
esse avremo EXT_INT0 ed EXT_INT1 invocate dai pickup.
5.4.2.1 INT_EXT0.
Coerentemente con l’ordine stabilito nel VI, viene
invocata dal pickup2. Il valore del contatore viene letto
e posto nella pila “velocità”, quindi, resettato.
Cap. 5 – Prospettive
101
5.4.2.2 INT_EXT1.
Viene invocata dal pickup1. Il valore
del contatore viene letto e posto nella
pila “ritardi”. Nel caso sia relativo
all’ultimo impulso, il 39°, effettua la
media sia dei valori della pila
“velocità”, ricavando gli RPM, che dei
ritardi, ricavando, in ultima analisi, il
valore della coppia.
5.4.3 L’interfaccia utente.
Potrà prevedere, a seconda delle necessità, un display, un tastierino ed
una porta (es.USB) per l’interfacciamento con un pc.
Appendici
102
Appendici.
App. A – Segnali Analogici: masse e disturbi
103
A.
Segnali Analogici: masse e disturbi.
La campagna sperimentale è stata preceduta da una revisione completa
degli apparati di misura, rieseguendo i cablaggi ed eliminando alcune
criticità. A tal fine è stata prestata la massima attenzione al collegamento
delle masse (field wiring) ed adottati accorgimenti per limitare i disturbi
(EMI).
L’integrità e la correttezza dei dati acquisiti dipendono dall’intero
percorso che il segnale analogico compie e dalla configurazione degli
stadi d’ingresso analogici dei dispositivi di aquisizione.
A.1 Segnali e Sistemi di Misura.
Tipicamente i circuiti di condizionameto associati ai sensori producono
un segnale in tensione. Altre tipologie, ad es. in corrente o in frequenza,
vengono adottate nel caso il segnale debba percorrere lunghe distanze in
ambienti “rumorosi”.
Un segnale in tensione viene misurato come
differenza di potenziale tra due punti. Le
sorgenti possono essere raggruppate in due
categorie:
- grounded;
- ungrounded (floating).
Analogamente i sistemi di misura:
- grounded o ground-referenced;
- ungrounded (floating).
A.1.1 Grounded or Ground-Referenced Signal Source.
E’ una sorgente il cui segnale in tensione è riferito all’impianto di messa
a terra dell’edificio. Ne sono un esempio gli strumenti alimentati
mediante la rete elettrica le cui uscite non siano state rese
intenzionalmente flottanti mediante isolamento.
App. A – Segnali Analogici: masse e disturbi
104
Le masse di due sorgenti di questo tipo connesse all’
impianto elettrico di uno stesso edificio, tuttavia,
generalmente non saranno mai allo stesso potenziale,
differenze tipiche sono nell’ordine dei 10÷200mV.
Differenze maggiori indicano imperfezioni nell’impianto.
A.1.2 Ungrounded or Nonreferenced (Floating) Signal
Source.
E’ una sorgente il cui segnale in tensione non è riferito ad
un potenziale “assoluto”, come quello di terra o
dell’edificio. Ne sono un esempio gli strumenti alimentati
mediante batterie, le pile elettriche, le termocoppie, i
trasformatori, gli amplificatori d’isolamento ed ogni altro
strumento le cui uscite siano state rese intenzionalmente
flottanti.
Si noti come nessuno dei due terminali della sorgente sia riferito a
massa, quindi entrambi i terminali sono indipendenti da terra.
A.1.3 Differential or Nonreferenced Measurement System.
E’ un sistema di misura che non ha
alcuno dei suoi ingressi collegati
ad un riferimento fissato come la
terra o la massa dell’edificio.
Strumenti portatili a batteria o
dispositivi d’acquisizione dotati di
amplificatori da strumentazione ne
sono un esempio. Il dispositivo in
figura, un sistema di misura
differenziale ad otto canali, è
implementato con due multiplexer
analogici
ed
un
unico
amplificatore da strumentazione; il
pin denominato AI GND, Analog
Input Ground, costituisce la massa
del sistema di misura.
App. A – Segnali Analogici: masse e disturbi
105
Un sistema di misura differenziale ideale risponde solo alla differenza di
potenziale tra i suoi due terminali, gli ingressi (+) e (-). Qualsiasi
tensione, misurata rispetto al ground dell’amplificatore da
strumentazione, presente su entrambi gli ingressi dell’amplificatore è
detta Common-Mode Voltage (tensione di modo comune), VCM: in un
sistema ideale essa viene completamente reiettata.
Questa proprietà è utile ai fini della reiezione dei disturbi, che spesso
vengono “raccolti” dai cavi appunto come segnali di modo comune. Nei
sistemi reali, tuttavia, tale proprietà risulta notevolmente ridimensionata
da diverse limitazioni descritte da parametri quali il Common-Mode
Voltage Range e il Common-Mode Rejection Ratio (CMRR).
Il VCM è definito come:
VCM = (V+ + V-)/2
dove V+ (V-) rappresenta la tensione tra il terminale non invertente (+)
(invertente (-) ) e il ground del sistema di misura.
I CMRR in dB è definito come:
CMRR (dB) = 20 log (Differential Gain/Common-Mode Gain)
In figura un circuito puramente indicativo
per la misura del CMRR, si avrà:
CMRR (dB) = 20 log VCM/VOUT
dove
V+ = V- = VCM
Il common-mode voltage range limita il voltage-swing di ciascun
ingresso rispetto a ground. Esulare da esso può tradursi non solo in un
errore di misura ma anche in un danneggiamento del dispositivo.
Come indica il termine, il CMRR esprime la capacità del sistema di
misura differenziale di reiettare i segnali di modo comune. Il CMRR è
funzione della frequenza, tipicamente peggiora all’aumentare di essa.
Può essere ottimizato usando un circuito bilanciato. Tipicamente per i
App. A – Segnali Analogici: masse e disturbi
106
dispositivi viene riportato il CMRR a 50Hz (o 60Hz), la frequenza di
rete.
A.1.4 Grounded or Ground-Referenced Measurement
System.
E’ simile ad una sorgente di tipo
grounded nel senso che la misura
viene effettuata rispetto a massa.
In figura un sistema di misura ad
8 canali Ground-Referenced
Single-Ended (RSE).
Una variante della tecnica di misura single-ended, conosciuta come
nonreferenced single-ended (NRSE), viene spesso adottata nei
dispositivi di acquisizione. Le misure vengono ancora effettuate rispetto
ad un nodo di riferimento (AI
Sense, Analog Input Sense) ma
il potenziale di quest’ultimo può
essere diverso rispetto alla
massa del sistema di misura (AI
GND). Dalla figura si evince che
un sistema di misura singlechannel NRSE è uguale ad un
sistema di misura differenziale
single-channel.
A.2 Schemi per una corretta acquisizioni di
segnali analogici.
A.2.1 Acquisizioni da Grounded Signal Source.
I sistemi più opportuni per misurarla sono il differential ed il
nonreferenced.
App. A – Segnali Analogici: masse e disturbi
107
In figura vengono evidenziati
gli errori che insorgono
tentando di utilizzare un
ground-referenced: la tensione
misurata, Vm, è data dalla
somma della tensione del
segnale, Vs, e la differenza di
potenziale, ΔVg, che esiste tra il
signal source ground e il
measurement system ground, in altri termini si forma un ground loop
(maglia di terra). Questa differenza di potenziale non è generalmente un
livello in continua, quindi il disturbo introdotto potrà avere sia
componenti DC che AC che si tradurranno in errori di offset e
rumorosità, spesso con la comparsa di componenti spettrali alla
frequenza di rete. La differenza di potenziale tra due ground causa la
circolazione di corrente attraverso l’interconnessione detta ground-loop
current. Questa tipologia, tuttavia, può essere adottata nel caso i livelli di
tensione del segnale siano molto elevati ed i cavi di interconnessione tra
la sorgente ed il dispositivo abbiano una bassa impedenza, nel qual caso
gli errori introdotti saranno accettabili.
La polarità di una sorgente grounded deve essere scrupolosamente
rispettata nel collegarla ad un sistema ground-referenced al fine di
evitare di cortocircuitarla a massa e causarne il danneggiamento.
I sistemi di acquisizione, per effettuare misure di tipo nonreferenced,
prevedono tipicamente la possibilità di configurare gli ingressi sia come
differential (DIFF), come in figura, che NRSE. In entrambe le
configurazioni
qualsiasi
differenza di potenziale tra i
riferimenti di tensione della
sorgente e del dispositivo di
misura apparirà come una
tensione di modo comune e
verrà
sottratta
dal
dispositivo
al
segnale
misurato.
App. A – Segnali Analogici: masse e disturbi
108
A.2.2 Acquisizioni da Floating (Nonreferenced) Source.
Per misurarle è possibile impiegare sia sistemi differential che singleended. Nel primo caso, comunque, bisogna prestare attenzione a che il
livello della tensione di modo comune del segnale rispetto al ground del
sistema di misura rimanga nel common-mode input range del
dispositivo.
Numerosi fenomeni, ad esempio le input bias currents (correnti di
polarizzazione in ingresso) dell’amplificatore da strumentazione,
possono far traslare il livello di tensione di una floating source oltre i
limiti consentiti dallo stadio d’ingresso del dispositivo d’acquisizione.
Per ancorare questo livello di tensione ad un riferimento possono essere
impiegati dei resistori, come nella figura successiva, detti bias (di
polarizzazione) resistors. Essi realizzano un collegamento DC (in
continua) tra gli ingressi dell’amplificatore da strumentazione e la sua
massa. Il valore delle resistenze dovrebbe essere grande abbastanza da
consentire alla sorgente di flottare rispetto al riferimento tensione per la
misura (l’AI GND del sistema precedentemente descritto) e non caricare
la sorgente, ma sufficientemente piccolo da mantenere la tensione nel
range consentito dallo stadio d’ingresso del dispositivo. Valori tipici
nell’ordine dei 10k÷100k[Ω] sono adeguati per sorgenti a bassa
impedenza come termocoppie e condizionatori di segnale. Questi
resistori vengono interposti tra ciascun conduttore e la massa del sistema
di misura.
Bisogna prestare la massima attenzione nell’impiegarli, un uso scorretto
potrebbe tradursi in letture “ballerine” o portare alla saturazione (positive
full-scale or negative full-scale).
Se il segnale in ingresso è DC-coupled (accoppiato in continua), solo un
resistore connesso tra l’ingresso invertente (-) e la massa del sistema di
misura è richiesto per soddisfare la necessità di una richiusura per la
corrente di polarizzazione, ma questo porta ad un sistema unbalanced
(sbilanciato) se l’impedenza della sorgente è relativamente elevata. Da
un punto di vista del rumore sono auspicabili sistemi bilanciati. Quindi,
due resistenze di ugual valore, una per ciascun ingresso del segnale( (+)
e (-) ) verso massa, dovrebbero essere impiegate nel caso di impedenze
di sorgente elevate. Un singolo bias resistor è sufficiente per lowimpedence DC-coupled source, es. termocoppie.
App. A – Segnali Analogici: masse e disturbi
109
Se il segnale in ingresso è AC-coupled (accoppiato in alternata), sono
necessari due resistori per consentire le richiusure per le correnti di
polarizzazine dell’amplificatore da strumentazione.
In figura una floating source ed
una configurazione d’ingresso
differential.
Le
resistenze
(10Ω<R<100kΩ) consentono
una richiusura a massa per le
input bias currents dell’
istrumentation amplifier.
Per DC-coupled signal source è sufficiente R2. Per AC-coupled sources
è necessaria anche R1 (ed inoltre dovrà essere R1=R2).
Nel caso sia necessario utilizzare una
configurazione d’ingresso di tipo singleended, si avranno due possibilità,
illustrate in figura: impiegare un RSE
input system ed in questo caso non si
determinerà alcuna maglia di terra. In
alternativa si potrà adottare un sistema
NRSE, peferibile da un punto di vista
della sensibilità ai disturbi ma sarà
necessario inserire dei bias resitor(s) tra il
terminale d’ingresso AI SENSE e la
massa del sistema di misura (AI GND).
App. A – Segnali Analogici: masse e disturbi
110
A.2.3 Tavola Sinottica.
E’ necessario adottare i resistori di polarizzazione quando vengono
effettuate misure su sorgenti floating in configurazione differential o
NRSE pena ottenere letture “ballerine” o la saturazione (negative or
positive full-scale).
In generale, un sistema di misura differential è da preferire perché non
solo consente di evitare gli errori introdotti da una maglia di terra ma
limita la vulnerabilità ai disturbi ambientali.
App. A – Segnali Analogici: masse e disturbi
111
La configurazione single ended, d’altro canto, consente di avere il
doppio dei canali ma è ammissibile solo se l’entità degli errori introdotti
è inferiore all’accuratezza richiesta per le misure. Può essere impiegata
se tutti i segnali d’ingresso rispondono ai seguenti requisiti:
- Segnali di elevato valore (superiori ad 1V)
- Lunghezza dei cablaggi modesta e posa in ambienti noise-free o
propriamente schermati (shielded)
- Tutti i segnali in ingresso possono condividere un medesimo
riferimento alla sorgente.
In caso contrario è consigliabile adottare una configurazione differential.
A.3 Rumore dovuto ad accoppiamenti.
A.3.1 Minimizzare il Noise Coupling nelle interconnessioni.
Anche quando un setup corretto evita che si creino maglie di terra e la
saturazione degli stadi d’ingresso, il segnale acquisito inevitabilmente
avrà un certo livello di rumore o segnali spuri “raccolti” (“picked up”)
dall’ambiente. Questo è tanto più vero quanto più il livello dei segnali
analogici è basso. A peggiorare la situazione, le schede di acquisizione
per PC generalmente trattano attravero lo stesso connettore di I/O anche
segnali digitali. Di conseguenza, qualsiasi attività di questi segnali
digitali in ingresso o in uscita dalla scheda d’acquisizione che per un
certo tratto viaggino in prossimità dei segnali analogici di basso livello,
anche all’interno del cavo di interconnessione stesso, possono essere
sorgenti di rumore. Per minimizzare l’accoppiamento di disturbi generati
da queste o altre sorgenti, è indispensabile adottare cablaggi e
schermature opportune.
App. A – Segnali Analogici: masse e disturbi
112
Ci sono quattro meccanismi principali di accoppiamento: conduttivo,
capacitivo, induttivo e radiativo. Il conduttivo deriva dal convogliare
correnti provenienti da circuiti diversi in una medesima impedenza. Il
capacitivo è generato da campi elettrici variabili nel tempo nelle
vicinanze del percorso del segnale. Disturbi derivanti da accoppiamento
induttivo (o magnetico) sono il risultato di campi magnetici variabili nel
tempo attraverso l’area circoscritta da un percorso chiuso del segnale. Se
la sorgente di campi elettromagnetici è lontana dall’area “tagliata” dal
segnale gli accoppiamenti elettrico e magnetico vengono considerati
combinati e si parlerà, appunto, di accoppiamento elettromagnetico o
radiativo.
A.3.2 Accoppiamenti di tipo conduttivo.
I disturbi da accoppiamento conduttivo hanno luogo perché i conduttori
hanno impedenza finita. Di questo bisogna tener conto nella
progettazione di uno schema di
collegamento.
Può
essere
eliminato
o
minimizzato
“tagliando” le maglie di terra, se
ve ne sono, e prevedendo masse
separate per i piccoli segnali, i
grandi segnali ed i segnali di
potenza. In figura una schema di
collegamento di massa serie
causa di un accoppiamento di
tipo conduttivo. Se la resistenza
del tratto di conduttore a
comune (da A a B) è di 0,1[Ω]
la tensione misurata dal sensore
di temperatura varierà di 0,1 * 1
= 100 [mV] a seconda che
l’interruttore sia chiuso o aperto,
quindi avremo un risultato
falsato di 10°. Nel circuito
successivo vi sono collegamenti
di massa separati, quindi la
misura non verrà influenzata dal
fatto che il circuito di potenza
sia attivo o meno.
App. A – Segnali Analogici: masse e disturbi
113
A.3.3 Modellazione di accoppiamenti di tipo capacitivo ed
induttivo.
Una trattazione rigorosa di questi fenomeni richiederebbe l’uso delle
equazioni di Maxwell. Per una descrizione intuitiva e qualitativa di
questi meccanismi, tuttavia, si ricorrerà agli equivalenti elettrici a
componenti discreti.
L’accoppiamento capacitivo tra la
sorgente di rumore ed il circuito del
segnale sarà modellato con una
capacità Cef,
l’accoppiamento induttivo con una
mutua induttanza M.
L’adozione di circuiti elettrici equivalenti per modellare i fenomeni di
accoppiamento comporta la violazione di due assunzioni alla base
dell’analisi dei circuiti elettrici, cioè che tutti i campi elettrici siano
confinati all’interno dei capacitori e tutti i campi magnetici siano
confinati all’interno degli induttori.
A.3.4 Accoppiamenti di tipo capacitivo.
L’accopiamento di un campo elettrico viene modellato con una capacità
tra due circuiti. La capacità equivalente Cef è direttamente proporzionale
all’area di sovrapposizione ed inversamente alla distanza tra i due
circuiti. Così, aumentando la distanza o minimizzando l’area di
sovrapposizione diminuirà Cef quindi l’entità dell’accoppiamento. E’
possibile evincere dal modello equivalente altre caratteristiche
dell’accoppiamento capacitivo. Per esempio, esso è direttamente
proporzionale alla frequenza ed all’ampiezza della sorgente di rumore e
App. A – Segnali Analogici: masse e disturbi
114
all’impedenza del circuito di ricezione (cioè del segnale, che riceve,
appunto, il disturbo). Quindi, può essere ridotto diminuendo la tensione o
la frequenza della sorgente di rumore o abbassando l’impedenza del
circuito del segnale.
La Cef può essere ridotta anche adottando una schermatura opportuno,
prestando la massima attenzione sia al suo posizionamento (va collocata
tra i conduttori accoppiati capacitivammente) che al suo collegamento
(va collegata a massa solo la
sua estremità verso la
sorgente di segnale). La
schermatura
funziona
bypassando o creando un
percorso alternativo per le
correnti indotte così che non
vengano
condotte
dal
circuito del segnale. Un
corretto collegamento fà sì che non vi scorrano né correnti dovute al
segnale né dovute alle masse.
Collegarne entrambi i capi a
massa potrebbe causare il
passaggio
di
correnti
significative. Ad esempio,
una differenza di potenziale
tra i ground di 1[V] farebbe
scorrere 2[A] di corrente
attraverso una schermatura
caratterizzata
da
una
resistenza
di
0,5[Ω].
Differenze di potenziale dell’ordine del volt non sono inconsuete. Come
regola generale, metalli o materiali conduttori nelle vicinanze del
percorso seguito dal segnale non andrebbero mai lasciati elettricamente
flottanti, ciò potrebbe tradursi in un aumento della rumorosità per
accoppiamento capacitivo.
A.3.5 Accoppiamenti di tipo induttivo.
L’accoppiamento induttivo è il risultato del flusso di campi magnetici
tempo varianti attraverso l’area circoscritta da un segnale quando esso
compie un percorso chiuso (loop). Questi campi magnetici sono generati
da correnti che scorrono nei circuiti causa dei rumori. La tensione Vn
indotta nel circuito del segnale sarà data dalla:
App. A – Segnali Analogici: masse e disturbi
115
Vn=2π f B A cos α
dove f rappresenta la frequenza della densità di flusso (avendone
supposto un andamento sinusoidale), B il valore rms, A è l’area del loop
ed α è l’angolo tra la densità di flusso B e l’area A.
Nel circuito equivalente l’accoppiamento induttivo è schematizzato con
una mutua induttanza M; potremo esprimere, allora, Vn come:
Vn=2π f M In
dove In rappresenta il valore rms della corrente sinusoidale nel circuito
che origina il rumore ed f la sua frequenza.
Poiché M è direttamente proporzionale all’area del loop ed inversamente
alla distanza tra la sorgente di rumore ed il circuito del segnale,
aumentando la separazione o minimizzando l’area del loop formato dal
segnale si ridurrà l’accoppiamento induttivo tre i due circuiti, così come,
pure, riducendo la corrente In o la sua frequenza. Inoltre, la densità di
flusso B può essere ridotta intrecciando ad elica (twist) i conduttori del
circuito fonte di rumore. Infine, può essere adottata una schermatura
magnetica sia per la sorgente di rumore che per il circuito di segnale.
La schermatura contro campi magnetici a bassa frequenza non è così
semplice come quella per i campi elettrici. La sua efficacia dipende dal
tipo di materiale, permeabilità, spessore e dalle frequenze in gioco.
Grazie alla sua elevata permeabilità relativa, l’acciaio è molto più
efficace dell’alluminio o del rame per campi magnetici a bassa frequenza
(all’incirca al di sotto dei 100 kHz). Possono essere utilmente impiegati,
invece, a frequenze più elevate. Alle frequenze di rete (50-60Hz),
tuttavia, le proprietà schermanti di questi tre metalli risultano
eccessivamente blande, frequenze che, peraltro, rappresentano la causa
principale dei disturbi a bassa frequenza derivanti da accoppiamento
magnetico. Molto più efficace a tal fine risulta il Mumetal che, però, è
estremamente fragile e può andare incontro a significative degradazioni
della sua permeabilità. A causa della mancanza di controllo sui parametri
dei circuiti fonte di rumore e la relativa difficoltà di effettuare
schermature, l’unica strategia realmente efficace è quella di ridurre l’area
dei loop formati dal circuito del segnale. L’adozione di cavi twisted-pair
App. A – Segnali Analogici: masse e disturbi
116
risulta particolarmente benefica sia perché consente di ridurre l’area dei
loop sia perché cancella gli errori indotti.
E’ da notare come nelle configurazioni differential, adottando cavi
multipolari di tipo shielded twisted pairs, ciascuna coppia di conduttori
formerà loop di area estremamente ridotta. Al contrario, in
configurazione single ended, adottando lo stesso cavo, l’area dei loop
varierà da canale a canale.
Le sorgenti di segnale in corrente sono maggiormente immuni a questo
tipo di disturbi poiché le tensioni indotte magneticamente risultano in
serie alla sorgente, come in figura.
V21 e V22 sono sorgenti di
rumore
accoppiate
induttivamente, Vc è una
sorgente di rumore accoppiata
capacitivamente.
L’entità
dell’accoppiamento sia induttivo
che
capacitivo
dipende
dall’ampiezza dei disturbi e
dalla vicinanza delle sorgenti di
rumore al circuito del segnale,
quindi, miglioramenti possono
ottenersi limitando i livelli delle
fonti di rumore e incrementando
le distanze tra circuiti di rumore
e segnale. L’accoppiamento di
tipo conduttivo, invece, è il
risultato di un contatto diretto,
quindi, aumentare la separazione
fisica tra i due circuiti non comporta miglioramenti in tal senso.
A.3.6 Accoppiamenti di tipo radiativo.
Sorgenti radiative come stazioni di trasmissione radio e tv, canali di
comunicazione generalmente non vengono considerate sorgenti di
interferenze per sistemi di misura a basse frequenze (inferiori ai 100
kHz) d’acquisizione. Ma i disturbi ad alta frequenza possono essere
“raddrizzati” ed introdursi nei circuiti a bassa frequenza attraverso un
processo denominato “audio rectification”. E’ il frutto delle giunzioni,
App. A – Segnali Analogici: masse e disturbi
117
nonlineari, nei circuiti integrati (ICs) che si comportano come
rettificanti. L’effetto può essere limitato adottando semplici filtri lowpass passivi R-C all’estremità verso il ricevitore di cavi di collegamento
lunghi.
Anche i computer, i monitor, ecc. sono fonti di disturbi elettrici e
magnetici. Configurazioni di tipo differential risultano in tal senso
estremamente meno vulnerabili rispetto alle RSE.
A.3.7 Miscellaneous Noise Sources.
Nel caso i cavi di interconnessione non rimangano fissi ma, ad esempio,
siano sottoposti a vibrazioni, bisogna fare attenzione ad effetti di tipo
triboelectric come pure a tensioni indotte da variazioni di flusso
magnetico rispetto ai loop del segnale. L’effetto triboelettrico è causato
dalle cariche generate sul dielettrico all’interno del cavo se esso non
mantiene il contatto con i conduttori. Variazioni di flusso magnetico
possono aver luogo in seguito a variazioni dell’area dei loop causati da
movimenti dei conduttori che ne cambiano la posizione reciproca, che si
manifesta come un accoppiamento di tipo induttivo. La soluzione è
evitare cavi meccanicamente non vincolati.
Laddove i segnali abbiano livelli davvero molto bassi bisognerà, inoltre,
fare attenzione ad un altro fenomeno: le giunzioni di conduttori di
materiale diverso costituiscono delle termocoppie. Pur non costituendo
un fenomeno di interferenza in senso stretto, vale la pena menzionarlo
perché porebbe dare origine a misteriosi effetti di offset tra i canali.
A.4 Setup.
A.4.1 Sistemi Bilanciati.
Nel descrivere i sistemi di misura differenziali, si è detto che il CMRR
può essere ottimizzato adottando circuiti bilanciati. Tre sono i criteri a
cui un circuito deve rispondere afficnchè sia bilanciato:
- La sorgente è bilanciata, da entrambi i terminali (signal high and
signal common) verso massa si vede la stessa impedenza
- Il cavo è bilanciato, entrambi i conduttori hanno la medesima
impedenza verso massa
- Il ricevitore è bilanciato, da entrambi i terminali per la misura si
vede la stessa impedenza verso massa
App. A – Segnali Analogici: masse e disturbi
118
I disturbi “raccolti” per accoppiamento capacitivo risultano minimizzati
perché il disturbo in tensione indotto è lo stesso su entrambi i conduttori
poiché hanno la stessa impedenza verso massa e ed anche verso la
sorgente di rumore.
Affinchè il circuito in figura
risulti bilanciato è necessario sia:
Z1=Z2 , Zc1=Zc2
In queste condizioni risulterà:
V+=Ve la tensione dovuta all’accoppiamento capacitivo Vc apparirà come un
segnale di modo comune.
Nel caso di circuito non-bilanciato, invece, avremo:
Z1≠Z2 ˅ Zc1≠Zc2
la tensione Vc apparirà come una tensione differenziale, cioè:
V+≠Vcome tale, essa non potrà essere reiettata con un amplificatore da
strumentazione.
Maggiore è lo sbilanciamento del sistema, la differenza tra impedenze
verso massa e l’accoppiamento capacitivo della sorgente di rumore,
maggiore sarà la componente differenziale di rumore.
Un dispositivo configurato come differential rappresenterà un ricevitore
bilanciato, ma il circuito complessivamente risulterà sbilanciato se lo è il
cavo o la sorgente, come illustrato in figura.
E’ da notare come il
setup di tipo balanced
“carichi” la sorgente di
segnale di:
R=Rg1+Rg2
App. A – Segnali Analogici: masse e disturbi
119
Questo aspetto non è affatto trascurabile. Viceversa un setup di tipo
unbalanced non implica alcun effetto caricante.
In quest’ultimo, lo sbilanciamento (cioè la differenza tra le impedenze
verso massa viste dai conduttori di segnale high e low) è proporzionale
all’impedenza di sorgente Rs. Nel caso limite Rs=0[Ω], diventerà
anch’esso bilanciato, e quindi meno sensibile ai disturbi.
Esempi di cavi bilanciati sono il twisted pairs (unshelded t.p., UTP) o lo
shelded twisted pairs (STP). Un cavo coassiale, invece, non lo è perché i
due conduttori hanno differenti capacità verso massa.
A.4.2 Sorgenti e impedenze.
L’impedenza di sorgente è determinante ai fini dell’immunità ai disturbi
capacitivi del cablaggio tra sorgente e dispositivo d’acquisizione.
Transducer Impedance
Thermocouples
Thermistors
Resistance Temperature Detector
Solid-State Pressure Transducer
Strain Gauges
Glass pH Electrode
Potentiometer (Linear Displacement)
Characteristic
Low (<20 ohm)
High (>1 kohm)
Low (<1 kohm)
High (>1 kohm)
Low (<1 kohm)
Very High (1 Gohm)
High (500 ohm to 100 kohm)
Sensori caratterizzati da bassi livelli d’uscita ed alte impedenze
dovrebbero essere “processati” da un condizionatore posto a poca
distanza dal sensore.
A.4.3 Rumore e setup.
Per risolvere i problemi di rumore in fase si setup di un apparato di
misura bisogna innanzitutto individuare le cause delle interferenze.
Qualsiasi elemento può costituire una fonte di rumore, dal trasduttore al
dispositivo di acquisizione. Si può procedere, ad esempio, per
esclusione.
App. A – Segnali Analogici: masse e disturbi
120
Il dispositivo di acquisizione stesso va testato, con una sorgente a bassa
impedenza, senza impiegare cavi, ed osservando il livello di rumore
nelle misure. Banalmente si possono cortocircuitare i segnali high e low
verso l’analog input ground con un conduttore il più corto possibile,
preferibilmente sull’I/O connector del dispositivo. Il livello di rumore
osservato sarà, evidentamente, il più basso possibile. Nel caso dovesse
risultare confrontabile con quello ottenuto nel caso (che indicheremo con
(*) ) di sistema completo di cablaggi e sorgenti di segnale, si potrebbe
dedurre che è il dispositivo d’acquisizione stesso sorgente di rumore. Se,
tuttavia, i livelli misurati dovessero esulare i livelli riportati nel datasheet del dispositivo, fonte di rumore potrebbe essere un componente del
PC. Si potrebbe procedere, allora, rimuovendoli a turno o cambiando lo
slot sul quale la scheda è alloggiata. Anche la posizione del monitor può
influire. Specie nel caso di segnali di livello basso è consigliabile tenerlo
il più lontano possibile dai cavi di segnale e dal case.
Successivamente si può passare ad analizzare il cablaggio tra la sorgente
o il modulo di condizionamento del segnale ed il dispositivo
d’acquisizione. Per effettuare il test è bene impiegare una sorgente a
bassa impedenza, banalmente cortocircuitando i segnali high e low verso
l’analog input ground, con un ponticello direttamente sull’ I/O connettor
del cavo, ovviamente quello verso la sorgente di segnale. Nel caso il
livello di rumore risulti confrontabile con quanto osservato in precedenza
(*) se ne potrebbe imputare la causa al cavo o all’ambiente in cui è
posato. Scegliere un percorso alternativo, lontano dalle fonti di rumore,
potrebbe essere una soluzione. Nel caso la fonte dei disturbi non fosse
nota, si potrebbe procedere ad un’analisi spettrale e dalle frequenze in
gioco risalire alle sorgenti.
Nel caso il livello di rumore risulti inferiore, si potrebbe sostituire il
ponticello con una resistenza di valore pari all’incirca a quella della
sorgente di segnale o del modulo di condizionamento e verificare se
l’origine dei disturbi sia da imputare ad accoppiamenti capacitivi sul
cavo provocati da valori dell’impedenza troppo elevati. Un rumorosità
inferiore, rispetto al caso (*), in questa configurazione, invece,
assolverebbe il cavo e l’ambiente di posa incriminando la sorgente o il
condizionatore, o un’impropria configurazione del dispositivo
d’acquisizione.
App. A – Segnali Analogici: masse e disturbi
121
A.4.4 Rumore e signal processing.
Le tecniche di signal processing orientate alla riduzione del rumore
cercano di isolare la banda del rumore e massimizzare il rapporto
segnale-rumore. Possono essere distinte, a grandi linee, in due categorie:
la prima, detta preacquisistion, comprende vari tipi di filtraggio
(lowpass, highpass or bandpass) per ridurre il rumore fuori dalla banda
del segnale. La frequenza di acquisizione non dovrà eccedere la
dinamica o il range frequenziale del trasduttore.
Le tecniche di postacquisition, invece, possono essere descritte come
filtraggi digitali. La più semplice è la averaging (media). Si traduce in
filtraggi combinati, efficaci in special modo nella reiezione di specifiche
frequenze (particolarmente utili per le freq. di rete, frutto di
accoppiamenti induttivi, perché, come detto, difficilmete schermabili).
Al fine di ottimizzare la reiezione mediante l’averaging, la finestra
temporale Tacq da adottare per la media dovrà essere un multiplo intero di
Trej:
Tacq=Ncycles * Trej
dove
Trej=1/Frej
Frej rappresenta la frequenza che si vuole reiettare, Ncycles il numero di
cicli della Frej da mediare. Poiché Tacq= Ns * Ts dove Ns indica il numero
di campioni usati per la media e Ts è l’intervallo di campionamento,
potremo scrivere:
Ns * Ts = Ncycles * Trej
o
Ns * Ts = Ncycles / Frej
Quest’ultima determina il legame tra numero di campioni ed intervallo di
campionamento per reiettare una specifica frequenza mediante
averaging. Ad esempio, volendo reiettare la 60 Hz impiegando Ncycles=3
e Ns=40, il sampling rate ottimale sarà:
Ts =3/(60*40)=1.25ms
Quindi, mediando 40 campioni acquisiti con un intervallo di
campionamento pari a 1.25 ms (cioè 800 sample/s) saremo in grado di
reiettare il disturbo a 60Hz. Analogamente, mediando 80 campioni
acquisiti a 800 sample/s (10 letture/s) reietteremo sia la 50Hz che la
60Hz. Quando si usa una tecnica di filtraggio digitale lowpass, come
l’averaging, non è possibile assumere che il segnale risultante sia privo
di errori DC, es. un offset dovuto ad una maglia di terra. In altri termini,
App. A – Segnali Analogici: masse e disturbi
122
se effettuando un’averaging riusciamo ad eliminare un certo disturbo,
non è detto che automaticamente venga eliminato anche un eventuale
errore di offset DC. Il sistema deve essere opportunamente testato se
l’accuratezza assoluta costituisce una specifica irrinunciabile.
A.5 Bibliografia.
- Field Wiring and Noise Considerations for Analog Signals,
www.ni.com
- S Series User Manual, www.ni.com
- ABCs of ADCs - Analog-to-Digital Converter Basics,
www.national.com
- Controlling Noise and Radiation in Mixed-Signal and Digital
Systems, www.national.com
App. B – Analisi nel Dominio di Fourier e Campionamento
123
B.
Analisi nel Dominio di Fourier e
Campionamento.
B.1 Trasformata Continua di Fourier.
Segnali aperiodici a tempo continuo.
∞
X(f) = ∫ x(t) e-j 2 π f t dt
−∞
∞
x(t) =
∫ X(f) e
j 2π f t
dt
−∞
B.2 Trasformata di Fourier di una sequenza.
Segnali aperiodici a tempo discreto.
Si può immaginare la sequenza x[n] ricavata dal campionamento del
segnale x(t):
x[n]=x(nT)
si definiranno, allora:
X (f) =
∞
x[n] e -j 2 π f T
∑
n = −∞
− 1 2T ≤ f ≤ 1 2T
1 2T
x[n] = T
∫ X (f) e
j 2π f t
df − ∞ ≤ n ≤ ∞
−1 2T
Affinchè sia rispettata la confizione di Nyquist dovrà essere:
fc = 1 T ≥ 2B
App. B – Analisi nel Dominio di Fourier e Campionamento
124
B.3 Trasformata Discreta di Fourier.
Segnali periodici a tempo discreto (sequenze periodiche).
Si può immaginare la sequenza X k ricavata dal campionamento dello
spettro X (f) :
X k = 1 N 0 X ( k N 0T )
Si definiranno, allora:
x[n] =
N 0 −1
∑X
k
k =0
X k = 1 N0
e j 2 πkn N0 0 ≤ n ≤ N 0 − 1
N 0 −1
∑0 x[n] e
− j 2 πkn N 0
n=
0 ≤ k ≤ N0 − 1
B.4 Relazioni.
- La risoluzione in frequenza determina il tacq.
- La risoluzione temporale determina la Banda.
tacq=1/∆f infatti:
=N0 1/fc =N0 T
2B=1/∆t infatti:
=N0 1/tacq =N0 ∆f
Da queste relazioni è possibile facilmente dedurre gli effetti di eventuali
sottocampionamenti.
In particolare, un sottocampionamento in frequenza, ottenuto tenendo
fissa la fc, quindi 2B, e variando N0, quindi la ∆f, comporterà una
riduzione del tacq, o, equivalentemente, nello spazio, una riduzione del
FOV (Field Of View).
App. B – Analisi nel Dominio di Fourier e Campionamento
B.5 Tavola sinottica.
Segnale a tempo continuo periodico
Spettro discreto aperiodico
Segnale a tempo continuo aperiodico
Spettro continuo aperiodico
Segnale a tempo discreto aperiodico
Spettro continuo periodico
Segnale a tempo discreto periodico
Spettro discreto periodico
B.6 Bibliografia.
- L. Landini, Elaborazione delle Bioimmagini I
- M.Luise, G.M.Vitetta, Teoria dei Segnali, McGraw-Hill
125
App. C – Caratterizzazione del circuito squadratore
126
C.
Caratterizzazione del circuito
squadratore.
C.1 Condizioni di prova.
La strumentazione utilizzata per realizzare i test si compone di:
- Oscilloscopio ISO-TECH mod. ISR 2102
• Analogico, 100 MHz
- Generatore di Funzioni Hewlett-Packard mod. 3311A
• 0.1 Hz to 1 MHz
• 20V p.p.@open circuit; 10V p.p.@600Ω
• SquareWave Transition Time (10%-90%): < 100 nsec
- Alimentatore Stabilizzato Farnell Instruments LTD mod. L30-5
• 0-30 V, 5 A
Il circuito è stato implementato su una bread-board.
C.2 Primo stadio.
Viene testata la versione descritta al paragrafo 4.1.2 .
Il circuito viene sollecitato in ingresso con un’onda quadra a 24 KHz (v.
1.4) di ampiezza 3V p.p. .
Il generatore di segnale è collegato al canale 2 (CH2, traccia in basso),
l’uscita del BJT al canale 1 (CH1, traccia in alto).
Successivamente il circuito è stato sollecitato con un’onda quadra a 24
KHz di ampiezza 10V p.p.
App. C – Caratterizzazione del circuito squadratore
127
3V p.p.
ΔTlh=7µsec
Tf=8µsec
ΔThl=1.6µsec
VOL=0.2V
VOH=3.44V
Per semplicità operativa i ritardi non sono stati misurati secondo la
convenzione (50% - 50%) bensì considerando i punti d’angolo ed
analogamente i tempi di salita e discesa, tuttavia, si ritiene che ciò non
infici la significatività dei confronti.
App. C – Caratterizzazione del circuito squadratore
ΔTlh=3µsec
128
Tf=1,4µsec
ΔThl=2µsec
VOL=0.1V
VOH=3.44V
Risultano estremamente significative le riduzioni di ΔTlh e Tf. Le
variazioni più lievi potrebbero, invece, essere frutto di imprecisioni nel
posizionamento dei cursori. Si è scelto di non misurare il Tr perché
interessati al worst case.
App. C – Caratterizzazione del circuito squadratore
129
C.3 Secondo stadio.
Il circuito viene sollecitato in ingresso con un’onda quadra a 24 KHz di
ampiezza 10V p.p. .
L’uscita del NOT è collegata al canale 2 (CH2, traccia in basso), l’uscita
del BJT, che pilota il NOT, al canale 1 (CH1, traccia in alto).
In questo caso una misura ΔTlh e ΔThl con le stesse modalità del caso
precedente non sarebbe significativa per via del trigger di Schmitt del
Not. Si osservi, tuttavia, come i cursori posizionati sui fronti di
quest’ultimo intercettino le tracce superiori in corrispondenza all’incirca
dei valori di soglia del trigger, denotando un tpd estremamente contenuto.
Si notino le sovraelongazioni in uscita all’inveter e le oscillazioni
innescate dal superamento delle soglie sull’uscita del BJT.
130
Conclusioni.
Al termine di questo lavoro di tesi sono diversi gli aspetti da rimarcare.
Si è riusciti a progettare un sistema che non comporti modifiche
significative al banco, con l’impiego di pochi sensori, sfruttando appieno
il sistema si acquisizione esistente. Il confronto con un torsiometro
tradizionale in telemetria, inoltre, ne esalta le doti di affidabilità ed
economicità.
E’ stato possibile sperimentare gli immensi vantaggi che la progettazone
virtuale offre. La flessibilità data dalla strumentazione virtuale, composta
dal sistema d’acquisizione e dall’ambiente software LabVIEW, ha
consentito la realizzazione di diversi asset di prova in tempi ragionevoli,
arrivando, infine, alla determinazione della metodologia più opportuna e
delle specifiche del progetto. Sarebbe stato impensabile adattare
l’hardware ed il firmware di un sistema prototipo stand-alone per ciascun
asset.
Un’ultima riflessione s’impone.
La multidisciplinarità, oggigiorno, non rappresenta più, soltanto, un
valore aggiunto bensì un’esigenza, laddove il target sia l’innovazione.
Questo principio, imposto a livello industriale dalle leggi di mercato è
tanto più vero a livello di ricerca universitaria, a cui è affidato un ruolo
di precursore.