IT Administrator
Hardware
Materiale didattico validato AICA
Modulo 1
In collaborazione con
IT administrator - Hardware
Materiale didattico
progettato per EUCIP
IT Administrator
segnalato da AICA
Modulo 1 - Hardware
“AICA, Licenziataria
esclusiva in Italia
del programma
EUCIP (European
Certification
of Informatics
Professionals)
riconosce che il
materiale didattico
segnalato è
strutturato in
modo coerente con
l’organizzazione dei
contenuti prevista
dai documenti
EUCIP di riferimento.
Di conseguenza
AICA autorizza sul
presente materiale
didattico l’uso
dei marchi EUCIP
(registrato dal
CEPIS Concil
of European
Professional
Informatics
Societies) ed AICA
protetti dalle leggi
vigenti.”
1.1 Introduzione
al PC
A scuola con PC Open
Diventa esperto
nell’hardware per PC
Inizia un nuovo corso in 11 puntate, che permetterà di
conseguire la certificazione EUCIP IT Administrator Hardware, riconosciuta a livello europeo. La prima lezione
è dedicata alle schede madri e al BIOS di Marco Mussini
componenti e le periferiche del nostro PC, un corso
che toccherà e approfondirà i temi che gravitano attorno al mondo hardware. Dopo aver concluso con
successo il modulo 5 del Syllabus (dedicato alla Sicurezza), ci spostiamo ora sul modulo 1 (Hardware) che
è organizzato in collaborazione con Foxconn Italia e
certificato da AICA, Associazione Italiana per l’Informatica e il Calcolo Automatico, la più importante associazione nazionale di professionisti di informatica,
che ha come finalità principale lo sviluppo, fra i suoi
aderenti e nella più vasta comunità nazionale, delle
conoscenze attinenti la disciplina informatica in tutti
i suoi aspetti scientifici, applicativi, economici e sociali. Il corso seguirà il Syllabus 2.0, modulo 1, della
certificazione EUCIP – IT Administrator che serve per
preparare l’esame in una delle sedi autorizzate. Iniziamo parlando di schede madri e di BIOS, la base su cui
sono installati i componenti principali del nostro PC.
I
I componenti di base
La tecnologia dell’informazione e della comunicazione (Information and Communication Technology,
o ICT) ha per oggetto i sistemi progettati per immagazzinare, comunicare, elaborare informazioni. Anche
se numerosissime classi di prodotti incorporano tecnologie e concetti dell’ICT, dagli elettrodomestici agli
orologi da polso, dai sistemi di intrattenimento ai circuiti di controllo per il motore dell’auto, lo strumento principe per l’applicazione pratica dell’ICT, quello
più diffuso e conosciuto e quello che sta avendo finora il maggior impatto sulla vita quotidiana delle persone, sulle modalità pratiche di lavoro in ogni campo,
nonché sull’aumento della produttività, è il Personal
Computer (PC), sulla cui approfondita conoscenza
questo corso si focalizzerà.
Componenti principali
1.1.1 Componenti
principali
1.1.1.1 Comprendere
i concetti
fondamentali
relativi all’hardware e
software
Lezione 1
Anche se verrebbe spontaneo associare il concetto di PC all’oggetto materiale che lo costituisce fisicamente, questa identificazione è superficiale e inesatta. In realtà quasi tutti i sistemi informatici, e segnatamente i PC, devono intendersi costituiti da due distinte componenti che potrebbero dirsi quasi in “simbiosi” dato che non avrebbero alcun senso né utilità
l’una separata dall’altra. Queste due componenti sono l’hardware e il software.
I fondamenti relativi all’hardware e software
L’hardware di un computer è costituito dall’insie-
PC Open 2 www.pcopen.it
PDF DEL CORSO
NEL DVD
Calendario delle lezioni
Lez 1: la scheda madre e il BIOS
Lez 2: i processori
Lez 3: la RAM
Lez 4: bus e risorse di sistema
Lez 5: interfacce
Lez 6: memorie di massa
Lez 7: i monitor e le schede grafiche
Lez 8: le stampanti
Lez 9: hardware di rete
In collaborazione con
Lez 10: alimentatori
e installazione nuovo
hardware
Lez 11: risoluzione dei
problemi
me di parti materiali, come circuiti, telai metallici, cavi, motori, ventole, spie, interruttori, spine e prese,
che concorrono a formare l’oggetto fisico e tangibile
che comunemente chiamiamo computer. Questo insieme di parti è progettato per eseguire compiti estremamente semplici con la massima velocità, accuratezza e ripetibilità. Tali compiti includono, a titolo di
esempio:
• il trasferimento di un dato da una parte all’altra della macchina o fra questa e l’esterno,
• la lettura o scrittura di un dato su memoria persistente o volatile,
• l’accensione di un singolo puntino colorato sullo
schermo,
• l’emissione di un impulso acustico,
• il rilevamento di un tasto premuto sulla tastiera,
• la somma di due numeri interi.
Come si vede, il tipo di compiti che l'hardware è
in grado di eseguire direttamente è decisamente elementare e di scarso interesse. Tuttavia, eseguendo
in modo finalizzato, coordinato e accuratamente sincronizzato un enorme numero di questi compiti elementari, è possibile svolgere compiti più utili e interessanti:
• accendendo un gran numero di puntini sul video è
possibile comporre immagini;
• emettendo in modo ben preciso alcuni impulsi acustici è possibile riprodurre musica, voci e suoni;
• ripetendo più volte il trasferimento di dati elementari dalla memoria locale non volatile alla porta di
Lezione 1
IT administrator - Hardware
comunicazione è possibile trasmettere informazioni complesse;
• effettuando somme ripetute secondo uno schema
preordinato è possibile calcolare un prodotto;
e così via.
In quest’ottica, il software è l’insieme di procedure
codificate (programmi) che prescrivono come eseguire in modo coordinato queste grandi quantità di
operazioni elementari per realizzare compiti di interesse applicativo significativo. Come già ricordato,
hardware e software possono trovare utile impiego
solamente insieme. Infatti, l’elaboratore senza programmi (hardware senza software) possiede la capacità di eseguire compiti, ma a un livello di astrazione
troppo basso perché questi risultino, di per sé, di una
qualche utilità pratica. Viceversa, un programma non
associato a una macchina in grado di comprenderlo
ed eseguirlo (software senza hardware), sebbene abbia un valore concettuale in sé, in quanto “cattura”
e descrive compiutamente un procedimento valido
e corretto per eseguire compiti complessi, da solo è
inutile come lo sarebbe un insieme di procedure burocratiche senza funzionari che le conoscano e le applichino.
I principali componenti del PC
Concentriamo ora la nostra attenzione sull’hardware, che costituirà l’oggetto dell’intero corso. Verrà considerato in particolare l’hardware dei PC, anche se la maggior parte dei concetti di base è valida
in generale per qualsiasi classe di elaboratore, dal
microcontrollore per elettrodomestici al supercomputer per calcolo scientifico. Quasi tutti i computer
oggi esistenti e la totalità dei personal computer sul
mercato sono stati progettati secondo un’architettura logica di base che rappresenta un’evoluzione dell’impostazione di base dovuta a Von Neumann. Questa si riflette parzialmente anche sulla struttura fisica
della macchina. L’hardware dei PC comprende infatti
alcune componenti fondamentali con compiti chiaramente identificati.
• La scheda madre (motherboard), detta anche
scheda principale (main board). Si tratta di un circuito stampato di elevata complessità che provvede
all’interconnessione elettrica fra le altre componenti
interne elencate di seguito, fornendo anche le sedi
(dette socket o slot, a seconda della forma piana o a
fessura) per l’ancoraggio meccanico di alcune di esse,
come la memoria, la CPU e le schede di espansione.
Sulla motherboard circolano sia correnti elettriche di
media potenza, destinate ad alimentare le varie componenti per consentirne il funzionamento, sia corren-
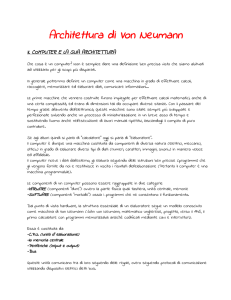
La CPU è sede
dell’esecuzione dei
programmi: calcoli,
confronti, decisioni,
iterazioni, trasferimenti
di dati avvengono qui o
vengono controllati da
qui. La sede che alloggia
la CPU è posizionata sulla
motherboard
1.1.1.2 Distinguere i
principali componenti
hardware del PC
ti elettriche (estremamente deboli) usate per attuare
concretamente la comunicazione dati fra una parte e
l’altra. Di queste correnti, le prime sono fornite dalla
sezione di alimentazione della macchina, che ne assicura la quantità e la stabilità; le seconde sono invece generate dai vari circuiti della macchina, in ultima
analisi in base agli ordini contenuti nel programma in
esecuzione.
• L'unità centrale di elaborazione (central processing unit, CPU), fisicamente realizzata (“implementata”) mediante un microprocessore. La CPU si occupa
di eseguire confronti e calcoli, di prendere decisioni,
di ripetere compiti e di impartire ordini al resto della
macchina perché questa memorizzi, riceva, trasmetta
o visualizzi dati. È la CPU a eseguire, ad elevatissima
velocità, le istruzioni che costituiscono i programmi.
• La memoria di lavoro (RAM), in cui devono trovarsi i programmi e i dati durante l’esecuzione perché
la CPU possa accedervi. Questa memoria è realizzata
con una tecnologia elettronica a semiconduttori che
garantisce un’elevata velocità di funzionamento e un
tempo di accesso indipendente dalla particolare locazione che deve essere letta o scritta (Random Access
Memory, RAM). Tuttavia il contenuto di questa memoria svanisce al venir meno dell’alimentazione, e perciò
si parla di memoria
“volatile”.
• La memoria di
massa, o persistente, è una forma di
memoria con caratteristiche tali da
renderla complementare alla precedente. La memoria
di massa pone innanzitutto rimedio
al problema della
volatilità della memoria di lavoro, in
quanto i dati in essa immagazzinati
vengono mantenuti
PC Open 3 www.pcopen.it
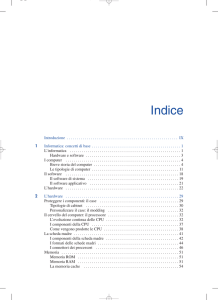
La memoria di lavoro
volatile contiene i
programmi in esecuzione
e i dati di impiego
immediato. Realizzata
con tecnologia a
semiconduttori, ha
tempo di accesso
indipendente dalla
locazione (donde il nome
RAM) ed è fisicamente
confezionata sotto forma
di moduli comprendenti
un certo numero di chip
elementari
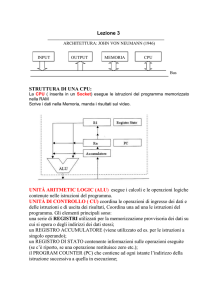
La motherboard è il
componente hardware
che ospita direttamente
e interconnette molte
delle più importanti
componenti del PC:
CPU, memoria, schede
audio e video, porte di
espansione. Speciali
cavi, inoltre, la collegano
con altre componenti,
come l’alimentatore e
le unità di memoria di
massa a disco
La memoria di massa,
solitamente basata
su un principio di
funzionamento magnetico
o ottico anzichè
puramente elettronico,
conserva le informazioni
immagazzinate anche
quando il PC viene
spento. Per grandi
capacità la scelta
obbligata sono le unità
a disco fisso (hard disk),
solitamente montate
all’interno del cabinet,
ma che in alcuni sistemi
possono anche essere
ad accesso frontale per
consentire una facile
sostituzione in caso di
guasto
IT administrator - Hardware
La circuiteria che implementa il sottosistema video può essere integrata nella motherboard
oppure essere realizzata su una scheda come questa, da collegare a uno degli slot di espansione
presenti sulla motherboard. La scheda grafica può essere equipaggiata con una propria CPU
specializzata (GPU), RAM e dissipatore
La maggior parte delle
porte di espansione
offerte dal PC si trova
sul retro, con la possibile
eccezione di un paio di
porte USB,
Firewire o
audio che
possono
essere
replicate per
comodità
sul pannello
frontale. Gli
standard di
formato delle
motherboard
prescrivono
anche
l’ubicazione
delle porte.
Per alcune di
esse, come
quelle audio
oppure quelle
per tastiera e
mouse, anche
il colore è
standardizzato
per lunghissimi periodi anche in mancanza di alimentazione. La sua capacità è molto maggiore di quella
della memoria di lavoro, mentre la velocità è molto
inferiore. Può essere di sola lettura oppure prevedere anche la possibilità di essere scritta, una sola volta
oppure più volte.
La memoria di massa è solitamente realizzata con
tecnologia magnetica (hard disk), magneto-ottica o
puramente ottica (CD, DVD, Blu-Ray): in tutti questi
casi l'unità di memoria di massa ha parti in rotazione
(disco) o comunque in movimento (testine). Stanno
però facendosi rapidamente largo anche nelle memorie di massa le tecnologie basate su semiconduttori,
che consentono la realizzazione di dispositivi completamente a stato solido (memorie flash).
• Sottosistema video. Generalmente realizzato
sotto forma di una scheda circuitale distinta dalla
motherboard, con una propria memoria e una propria CPU ("scheda grafica" o "graphics board", la CPU
è anche detta GPU – Graphic processing unit), questo
blocco logico si occupa di mantenere una rappresentazione interna delle immagini da visualizzare sullo
schermo, e di generare i segnali elettrici adatti a pilotare l'elettronica di tale periferica affinché il disegno
generato dalle istruzioni del programma appaia sul
monitor. In alcuni PC, per ragioni di miniaturizzazione
oppure per ridurre i costi, il sottosistema video può
anche essere integrato sulla scheda madre e può fare uso della stessa memoria di lavoro usata per programmi e dati ("memoria condivisa").
• Sottosistema audio. Anche in questo caso si parla spesso di "scheda audio" oppure di "audio integra-
PC Open 4 www.pcopen.it
Lezione 1
to" a seconda che la circuiteria sia ospitata da una
scheda distinta dalla motherboard oppure a bordo
della motherboard stessa. Sono presenti prese per
collegare altoparlanti o cuffie esterne, nonché prese
per entrata audio e microfono.
• Porte di connessione ingresso/uscita (input/output, I/O). Questi connettori, e la circuiteria che gestisce i segnali elettrici in transito su di essi, servono per
collegare dispositivi esterni ("periferiche") che collaborano con il PC nell'esecuzione dei suoi compiti
- coadiuvandolo nella comunicazione con l’esterno
con l’uomo (altoparlanti, monitor, tastiere, mouse) o
con altre macchine (rete wired o wireless, porte USB,
porte seriali e parallele, porte Firewire),
- accrescendo quantitativamente le capacità intrinseche già presenti a livello elementare (dischi esterni
aggiuntivi, sistema audio migliorato),
- aggiungendo al PC capacità totalmente nuove (ricevitore TV, stampante e via dicendo).
• Alimentatore. Questo sottosistema ha il compito di convertire i livelli elettrici della fonte primaria di
alimentazione (per esempio: 220V, 50Hz) nell'insieme
di tensioni stabilizzate (12V, 5V, 3.3V...) richieste dai
componenti elettronici del PC per il proprio funzionamento. Particolarmente esigente in termini di accuratezza di regolazione è la CPU, che richiede una tensione stabilissima e precisa al centesimo di Volt.
• Involucro o chassis. Si tratta del mobile plastico o metallico al quale sono ancorati la motherboard
con il suo corteo di sottocomponenti, l'alimentatore,
le unità disco e il pannello delle connessioni I/O.
La sua struttura ha importanti implicazioni dal punto di vista funzionale (circolazione interna dell'aria di
raffreddamento) e della manutenzione (facile accessibilità alle varie parti del sistema ed ai cablaggi che le
interconnettono), oltre a determinare le possibilità di
installazione e in qualche caso la stessa destinazione
d'uso (desktop orizzontale o verticale, server in formato tower, blade o rack mounted, oppure notebook
e tablet di varie possibili forme e dimensioni).
Nel caso particolare dei notebook e tablet PC, l'involucro integra anche il monitor e deve rispondere a
importanti requisiti di leggerezza, compattezza e resistenza. Nel caso dei desktop e server, l'involucro, con
struttura metallica e qualche volta con esterno plastico, è spesso denominato chassis, case o cabinet; oltre
alla disposizione verticale o orizzontale e al numero
di sedi per unità disco esterne, la distinzione princi-
Lezione 1
IT administrator - Hardware
solo output, come stampanti, altoparlanti, monitor.
Anche l’immagazzinamento (storage) dei dati può
avvenire in modi diversi (su disco, in memoria RAM
e così via) a seconda della quantità di dati e delle esigenze di elaborazione. Tuttavia le quattro fasi fondamentali di funzionamento, input, processing, storage
e output, in qualche misura e in qualche forma, avvengono sempre.
Tipologie di computer
pale riguarda il cosiddetto "fattore di forma" (per es.
ATX, mini-ATX, BTX), che determina, spesso in modo
molto preciso, sia le dimensioni generali sia la disposizione delle varie parti interne.
Fuori dall'unità centrale, che raccoglie le componenti sopra elencate, troviamo alcune parti esterne
("periferiche") che da un punto di vista logico fanno
ancora parte del computer "base" in quanto generalmente indispensabili per il suo utilizzo: tastiera, mouse, schermo
Principio di funzionamento del PC
Chiarito che un personal computer è composto da
hardware e software che possono funzionare utilmente solo l’uno in funzione dell’altro, vediamo una prima
generalizzazione del principio di funzionamento del
sistema complessivo.
Scopo del PC è sempre quello di elaborare, secondo un programma memorizzato nella macchina, dei
dati che in ultima analisi devono essere stati forniti
dall’esterno, o quantomeno derivano da dati iniziali
forniti dall’esterno. Il flusso di dati forniti in ingresso
si definisce input, mentre quello dei risultati emessi in
qualsiasi forma dalla macchina si dice output. La fase
di elaborazione dei dati è detta processing, mentre la
memorizzazione a lungo termine dei dati di input, o
dei risultati intermedi o finali, è detta storage.
Per esempio, un programma che calcola la media di
N numeri deve ricevere in input il valore N e gli N numeri da elaborare; se sono particolarmente numerosi,
i valori possono essere depositati su disco, altrimenti troveranno posto in memoria centrale; avrà quindi
inizio la fase di elaborazione, al termine della quale il
programma provvederà all’output del risultato, rappresentato da un numero.
Questo schema generale si ritrova, a saperlo riconoscere correttamente, in tutte le situazioni d’impiego del PC. Quando navighiamo in Internet, alcuni
input arrivano al PC da tastiera e mouse; come risultato, il programma (browser) incaricato di gestire la
navigazione, e in esecuzione sul computer, provvede
a generare degli output intermedi che possono essere
richieste inviate via rete verso un sito Internet, al quale si richiede di spedire una pagina Web.
Dopo pochi istanti da questo sito arrivano al PC
dei dati (il codice HTML di cui si compone la pagina)
che costituiscono un input supplementare, anch’esso
elaborato dal browser per dare luogo all’output finale,
rappresentato dalla visualizzazione sul monitor della
pagina Web richiesta.
In generale l’input può pervenire da una molteplicità di fonti e anche l’output, analogamente, può essere instradato verso numerose periferiche in grado
di trattare flussi in uscita. Esistono periferiche bidirezionali, come la rete Ethernet e Wi-Fi, il Bluetooth,
le porte a infrarossi, le porte USB, Firewire, parallela
e seriale, il modem; periferiche per solo input, come
tastiera, microfono, scanner e mouse; periferiche per
Anche se tutti i computer sono composti da hardware e software e funzionano attraverso le quattro fasi operative citate, esistono ulteriori differenze dovute principalmente alla destinazione d’uso.
La sezione di
alimentazione è un
componente la cui
importanza ai fini del
regolare funzionamento
del sistema viene spesso
sottostimata. La tensione
primaria, 220V, viene
elaborata e trasformata
in varie tensioni
secondarie stabilizzate,
generalmente comprese
fra 3.3 e 12V, che
vengono distribuite ai
vari punti del sistema per
mezzo del fascio di cavi
visibile nell’immagine
Gli svariati usi del PC
Il comune Personal Computer (PC) è destinato a
un utilizzo per molteplici scopi (general purpose) da
parte di un utente generico. Tipici impieghi includono l’accesso a Internet, l’utilizzo di posta elettronica
e programmi di video scrittura, l’ascolto di musica,
l’esecuzione di programmi educativi o di intrattenimento (giochi) e così via.
Deve pertanto essere strutturato per poter assolvere a impieghi di ogni genere, anche a costo di non avere prestazioni da primato in ognuna di esse. La macchina deve cioè anteporre la flessibilità e la versatilità
alla ricerca di prestazioni di punta in impieghi specialistici. Inoltre, l’investimento iniziale deve essere il più
possibile contenuto, senza che venga preclusa la possibilità di successive espansioni per aggiungere alla
macchina le capacità eventualmente mancanti.
È quindi importante che la macchina disponga di
ampi ma equilibrati margini di espansione, partendo
da un adeguato supporto multimediale, un elevato
numero di interfacce esterne di vari tipi (USB, Ethernet, Firewire, card reader,…), vari slot di espansione
liberi, e così via.
L’espandibilità è estremamente importante dato
che per ragioni di costo non è ipotizzabile una frequente sostituzione dell’hardware. L’utilizzo deve essere semplice per poter servire l’utenza più ampia
possibile, anche a costo di ostacolare leggermente il
lavoro di un utente esperto.
Di tutt’altro genere sono le esigenze dell’utilizzatore professionale per scopi altamente specialistici. Un
progettista o disegnatore, per esempio, necessita di
una macchina ottimizzata per le massime prestazioni grafiche, con schermi (anche multipli) di grandi dimensioni, tempi di risposta bassissimi, ampie capacità di memoria e in alcuni casi anche dispositivi di
input di tipo avanzato, come mouse a più di due assi,
tavolette grafiche e così via. Il funzionamento non deve lasciare spazio a incertezze, blocchi o malfunzionamenti e il tipo di configurazione è destinato a rimanere stabile almeno quanto la destinazione d’impiego.
La macchina, vero e proprio strumento di lavoro
quotidiano, deve certamente disporre di margini di
espansione per ridurre l’obsolescenza, ma una sua sostituzione anche entro breve tempo potrà comunque
essere presa in considerazione in base a valutazioni
economiche. Questo tipo di computer è denominato workstation. Per fare un altro esempio di computer destinato a un impiego professionale, un computer per magazzinieri dovrà possedere caratteristiche
particolari, come la leggerezza e la compattezza, la
resistenza a urti e cadute, dovrà avere alcune speciali
periferiche integrate (come un lettore di codici a barre), la capacità di funzionare senza fili e una buona
PC Open 5 www.pcopen.it
1.1.2 Differenti tipi
di PC
1.1.2.1 Differenziare
fra: comune PC
- stazione di
lavoro [Workstation]
- server
1.1.1.3 Comprendere
il principio di
funzionamento del
PC: inserimento
[input], elaborazione
[processing],
memorizzazione dati
[storage],
presentazione
risultati [output]
IT administrator - Hardware
Un palmare è privo di
tastiera e non offre
un display di grandi
dimensioni, ma in termini
di CPU, RAM e memoria
di massa è paragonabile
a un PC da tavolo di
5-6 anni fa. In tema di
connettività wireless
(Bluetooth, WiFi, UMTS)
spesso è addirittura
più avanzato di molti
portatili attuali e anche
l’autonomia può essere
superiore
autonomia della batteria, una interfaccia di controllo
(magari a touch screen) facile da usare e impiegabile
anche con una sola mano, e così via.
Le macchine destinate a funzionare non agli ordini
di una singola persona, sia essa un utente generico o
un utente professionale, ma piuttosto per supportare
un qualche tipo di servizio informatico rivolto a utenti
multipli (come un sito Web, un archivio dati, una stazione di backup, o la stessa esecuzione di applicativi
via rete), sono dette server.
Elementi essenziali di queste macchine sono la capacità di memorizzazione persistente, la potenza di
calcolo, la quantità di memoria centrale e la velocità
di accesso alla rete tutte ai massimi livelli e con ulteriori significativi margini di miglioramento grazie
a una elevata espandibilità. Un server può anche essere privo di monitor e tastiera, dal momento che la
stessa amministrazione viene eseguita da remoto. In
compenso il suo funzionamento deve essere estremamente stabile ed essere assicurato, idealmente, in
via ininterrotta.
Il funzionamento cioè non dovrebbe interrompersi
né per una (temporanea) mancanza di alimentazione,
né per operazioni di manutenzione hardware e software, ordinaria e straordinaria (in un’ottica di business continuity). Per questo i server sono macchine
del tutto particolari, con ampio uso di componentistica specifica e proprietà strutturali diverse da quelle
dei PC e delle workstation. Anche il sistema operativo
di un server possiede caratteristiche particolari, tendenti ad assicurare che il funzionamento non subisca
interruzioni a causa di malfunzionamenti del sistema
operativo stesso o ad operazioni di manutenzione o
amministrazione.
I computer Apple, fino a poco tempo fa
l’alternativa al mondo “Wintel”
1.1.2.3 Conoscere
le caratteristiche dei
computer
portatili (notebook,
palmare/PDA, tablet
computer) e
postazioni per
terminali
Internet [Network
Computer]
1.1.2.2 Conoscere
le caratteristiche
principali dei
computer Apple
Gli ultraportatili sono i
notebook più piccoli e
leggeri (poco più di 1 kg).
Generalmente montano
display da 12” ad alta
risoluzione e processori
Centrino per consumare
il meno possibile e poter
così offrire una buona
autonomia nonostante la
batteria piccola e leggera
Nell’ambito dei Personal Computer, che sono in
stragrande maggioranza basati su processori compatibili con l’architettura x86, i modelli basati sullo
standard Apple hanno per anni costituito categoria
a sé. Soprattutto in passato, le differenze fra gli Apple e i “normali” PC erano profonde e riguardavano
l’hardware, il software e la filosofia generale in fatto
di espandibilità e di profilo d’utente tipico.
I computer Apple hanno montato per anni processori della famiglia Motorola 68000, per poi passare, in
una seconda fase, ai processori PowerPC, fino a convergere anch’essi, in epoca recentissima, su processori Intel. Per quanto riguarda il sistema operativo,
quello impiegato dai Macintosh si è sempre distinto
da quello impiegato sui PC contemporanei. Dopo la
lunga epoca di Mac OS, nel 2001 fu lanciato il Mac OS
X, basato su Unix e ancor oggi fornito con i nuovi Mac.
Fin dagli albori, tutti gli Apple Mac sono tipicamente
stati caratterizzati da un look originale, moderno e
pulito, sia nell’aspetto esteriore sia nell’interfaccia
grafica del sistema operativo, e da una modalità d’uso
particolarmente semplice anche per utenti inesperti.
L’espandibilità, non eccelsa nei primi anni di storia a
causa delle molte interfacce di I/O basate su standard
proprietari Apple, col tempo è molto migliorata.
In generale, grazie al processo di “avvicinamento”
alla tecnologia dei normali PC in tema di CPU, bus e
porte di espansione, i computer Apple sono progressivamente passati da una sorta di “isolamento in nicchia ecologica” degli albori, a un periodo in cui esistevano applicativi per Mac (come Office) che offrivano
comunque piena compatibilità con il PC per quanto
riguarda il formato dei dati, fino alla situazione attuale, in cui su un Mac è perfino possibile, volendo, installare e far girare Windows con le sue applicazioni
PC Open 6 www.pcopen.it
Lezione 1
assieme a Mac OS X. In conclusione, anche se i Mac
conservano ancor oggi degli evidenti tratti distintivi
che consistono essenzialmente nel look esteriore e
nel sistema operativo specifico, il processo di convergenza tecnologica con i PC ha aumentato la compatibilità e moltiplicato le possibilità d’uso. Veniamo ora
alla categoria dei computer portatili, a sua volta comprendente diverse sottofamiglie che si differenziano
per dimensioni, modalità d’impiego e potenza.
I palmari e i
subnotebook,
i PC in miniatura
I dispositivi più
piccoli e portatili,
con importanti restrizioni soprattutto per quanto riguarda espandibilità e memoria di
massa, sono i Personal Digital Assistant (PDA), spesso
detti “palmari”.
Sebbene siano
veri e propri computer miniaturizzati, completi di tutte
le funzioni fondamentali come CPU, RAM, memoria di
massa, schermo a colori, interfacce di rete, fotocamera, telefono e così via, non sono adatti per lavori gravosi e di lunga durata, ma rispondono perfettamente
alle esigenze del viaggiatore: leggerezza e minimo ingombro, facilità d’uso, connettività wireless.
In ogni caso, data la rapidissima evoluzione tecnologia, le capacità di questi palmari raggiungono livelli
di tutto rispetto, simili a quelle di PC da tavolo di solo 4-5 anni prima: le loro CPU raggiungono attualmente i 624 MHz, la RAM i 128 MB, lo schermo arriva alla
risoluzione VGA (640x480 pixel), mentre la memoria
di massa, basata su piccole schede flash rimovibili, è
configurabile secondo necessità fino a un massimo
(per ora) di 4 GB.
Al crescere delle dimensioni, delle prestazioni e del
peso troviamo i subnotebook, o ultraportatili. Questi
sono dotati di una tastiera completa e di un display a
coperchio (in genere con diagonale non maggiore di
12 pollici) e, chiusi, hanno un’impronta a terra minore di quella di un foglio di carta A4. Per contenere il
peso e le dimensioni questi prodotti solitamente sono privi di floppy e unità ottica e anche la batteria è
di volume ridotto. Quest’ultima limitazione si tradurrebbe in una autonomia operativa non eccelsa, se non
Lezione 1
fosse per l’impiego di speciali processori a bassissimo consumo elettrico (definiti dai rispettivi produttori Ultra Low Voltage oppure Extreme Efficiency). Le
prestazioni dei subnotebook sono abbastanza simili a
quelle dei fratelli maggiori, i notebook, e anche la modalità operativa (tastiera, display ad alta risoluzione,
trackpoint o mouse) è uguale a quella di un notebook
e non a quella di un palmare.
L’espandibilità in genere è assai ridotta, dato che
per motivi di spazio il computer è quasi privo di slot e
socket vuoti, connessioni USB e Firewire a parte. Tuttavia, molto spesso i subnotebook sono venduti con
una “docking station”, sorta di piattaforma di ancoraggio da tavolo che in caso di viaggio viene lasciata
alla base; la docking station può comprendere l’unità
ottica e il floppy, un certo numero di porte e interfacce supplementari e in qualche caso anche una batteria più capace.
Piuttosto elevato il prezzo, a causa dell’avanzata
tecnologia che è necessario impiegare per miniaturizzare e alleggerire l’unità.
Le differenze tra portatili
Un gradino sopra i subnotebook ci sono i rappresentanti della fascia di mercato più ampia in termini
di volumi di vendita, chiamati tout court “portatili”,
o notebook (o laptop). Questi sistemi dispongono di
uno schermo di grandi dimensioni (solitamente almeno 15” di diagonale, sempre più spesso in fattore di
forma “wide screen” come 16:9), di processori molto
veloci, di un disco fisso e una batteria ad alta capacità
e integrano un’unità ottica; in qualche raro caso addirittura anche una seconda unità ottica o un floppy,
nel qual caso si parla di “dual spindle” per specificare
che, anche senza contare l’hard disk, vi sono due sedi
occupate da memorie di massa. A causa soprattutto
dell’elevato consumo elettrico della CPU e del display,
però, la loro autonomia non sempre riesce a raggiungere valori ragguardevoli.
Le prestazioni migliori sotto quest’ultimo aspetto
si registrano sui modelli basati su CPU specifica a basso consumo per l’impiego mobile, come Pentium M,
Core o Core Duo (per Intel) o Turion 64 X2 (per AMD).
L’espandibilità rimane piuttosto limitata, tuttavia possibile aggiungere RAM e una o due schede PCMCIA
con facilità, mentre il numero di porte USB e Firewire
è tale da consentire l’aggiunta di diversi dispositivi
esterni anche ad alta velocità.
I notebook più potenti, con schermo di dimensioni molto grandi e fattore di forma Wide, tastiera talmente larga da avere talvolta anche un pad numerico, processore equivalente a quello di un desktop di
fascia alta, sistema audio con altoparlanti integrati di
grandi dimensioni, un gran numero di interfacce e slot
di espansione, un peso ben superiore ai 3 Kg e auto-
IT administrator - Hardware
I classici notebook
montano schermi da 14
o 15”, batterie di buona
capacità e processori
potenti. Integrano,
inoltre, un’unità ottica e
in qualche caso anche un
drive per floppy
nomia spesso piuttosto limitata, costituiscono una
categoria a parte, definita “desktop replacement” o
“trasportabili”, a indicare che il sistema ha una potenza tale da non far rimpiangere un comune sistema
desktop, ma che non è idoneo all’utilizzo in mobilità,
a causa di peso e ingombro molto elevati e dell’autonomia ridotta, che di fatto costringe spesso a cercare
una presa di corrente per poter continuare a lavorare. Questi sistemi devono essere quindi visti come dei
desktop che ingombrano poco spazio sul tavolo, non
comportano una presenza eccessiva di cavi e all’occorrenza possono essere facilmente trasportati. Purtroppo il loro prezzo, a parità di prestazioni, è come
minimo doppio di un desktop equivalente, e la loro
espandibilità rimane limitata, sebbene risulti superiore
a quella di un
notebook normale.
Un tipo molto particolare
di notebook è il
cosiddetto Tablet PC, nel quale il monitor, oltre a essere pieghevole, è ruotabile di 180 gradi, così da poter essere
sovrapposto alla tastiera con il display esposto sul
lato superiore. Oltre alla possibilità di essere ruotato
in questo modo, lo schermo ha un’altra caratteristica fondamentale: quella di essere sensibile al tocco
(touch screen).
In dotazione con la macchina è fornito uno stilo che
consente di puntare in modo preciso i vari punti dello
schermo. L’utilizzo può così avvenire, anziché tramite
tastiera e mouse, direttamente toccando lo schermo.
L’immissione di testo, in particolare, può avvenire come sui palmari, “scrivendo” con lo stilo sullo schermo
come se fosse un foglio di carta. In alcuni tipi di Tablet
Computer, la struttura non è semplicemente derivata da quella di un notebook già dotato di tastiera, con
l’aggiunta del perno di rotazione sul display e del touch screen, ma il computer è un’unica struttura solida
e la tastiera manca del tutto: l’utilizzo come tablet diventa l’unico possibile e non un’opzione.
Un originale tipo di PC portatile comparso recentemente sulla scena è il cosiddetto Ultra-Mobile PC
(UMPC), le cui caratteristiche distintive sono: dimensioni compatte, intermedie fra quelle di un palmare e
quelle di un subnotebook; peso di poco inferiore a 1
kg; potenza di calcolo simile a quella di un subnotebook (i processori attualmente utilizzati sono modelli a bassissimo consumo elettrico con clock fra 1 e 2
PC Open 7 www.pcopen.it
Un Tablet PC si può
utilizzare come un
notebook oppure,
ruotando lo schermo
grazie all’apposito
perno, come una
sorta di palmare dallo
schermo gigante, agendo
direttamente sul display
con lo stilo in dotazione
A metà strada tra un
palmare e un notebook,
l’ultra mobile PC, si
propone come una
nuova concezione del PC
portatile
IT administrator - Hardware
Le porte di connessione
di un portatile sono
solitamente poste ai
lati e sono in numero
limitato
GHz); sistema operativo Windows XP Tablet PC Edition derivato dalla stessa “famiglia” di quelli adottati da laptop o desktop, anziché da quella dei palmari (Windows Mobile); buone capacità di connettività
wireless (almeno WiFi e Bluetooth); aspetto “tutto
schermo”, con utilizzo tipico senza tastiera, attraverso il touch screen da circa 7 pollici e almeno 800x600
pixel, azionabile con le dita o con lo stilo (ma alcuni
modelli potranno comunque avere una tastiera estraibile o pieghevole). In questi PC il sistema operativo
comprende una “shell” specifica, la “Ultra-Mobile PC
Interface” progettata per facilitare al massimo l’utilizzo con le mani e il puntamento con dita o stilo (la shell
di un sistema operativo è l’interfaccia di controllo attraverso cui si impartiscono i comandi fondamentali,
come il lancio di applicazioni o le operazioni sui file).
Spesso sono presenti opzioni multimediali come un
GPS (per funzionalità di navigazione), una fotocamera
(per consentire di scattare fotografie, girare video o
comunicare in video chat) e un lettore di schede flash.
L’hard disk ha una capacità tipicamente compresa fra
30 e 60 GB, la RAM è di solito di 512 MB o 1 GB. I prezzi
sono ancora piuttosto alti, a partire da 1.000 euro.
Le principali limitazioni
imposte dai computer portatili
1.1.2.4 Conoscere le
principali limitazioni
imposte dai
computer portatili
1.2 Schede Madri
1.2.1 Funzione
1.2.1.1 Comprendere
il ruolo ricoperto
dalla scheda madre
1.2.1.2 Conoscere
le principali funzioni
integrate
nella scheda madre
Seppure in misura variabile a seconda della famiglia di appartenenza, i computer portatili soffrono tutti di alcune significative limitazioni rispetto alle possibilità offerte dai computer fissi.
Innanzitutto l’espandibilità, che è quasi del tutto affidata alle porte USB o Firewire: infatti, per ragioni di
spazio, il numero di slot è ridotto e il tipo di slot non è
il PCI, ma generalmente il PCMCIA, un fattore di forma
nel quale non tutti i tipi di schede e interfacce sono disponibili e il prezzo è normalmente maggiore rispetto
a quello di prodotti equivalenti in standard PCI. Incomincia anche a diffondersi la porta ExpressCard, capace di prestazioni maggiori rispetto alla PCMCIA, ma
che per ragioni di “gioventù” acuisce ulteriormente il
problema della disponibilità di prodotti.
Anche l’espansione di memoria RAM è spesso condizionata da un ridotto numero di slot, il cui fattore
di forma è specifico per sistemi portatili con la conseguenza di un innalzamento del prezzo dei moduli
compatibili. Nel caso specifico dei palmari l’espansione di memoria RAM è addirittura impossibile, salvo casi rarissimi che in genere richiedono comunque
la manomissione dell’unità.
L’installazione di dischi fissi supplementari è possibile solo all’esterno del portatile, con collegamento
USB o Firewire, mentre la sostituzione del disco fisso
interno di solito è tecnicamente possibile ma nella
maggior parte dei casi richiede di smontare l’unità, il
che implica la decadenza della garanzia o la necessità
di ricorrere (a caro prezzo) all’intervento di un centro specializzato.
I dischi fissi montati sui portatili, che devono innanzitutto rispondere a requisiti di basso consumo e
resistenza a urti e scosse, ben raramente superano i
PC Open 8 www.pcopen.it
Lezione 1
5.400 giri al minuto, mentre lo standard nei sistemi desktop è attualmente di 7.200 giri/min e alcuni modelli
raggiungono i 10.000 giri.
I PC portatili soffrono anche di limitazioni in ambito prestazionale, a causa dei limiti imposti da questioni di spazio, dissipazione termica e di autonomia.
I processori più veloci destinati a sistemi fissi non
possono evidentemente essere montati sui portatili,
se richiedono dissipatori attivi di grandi dimensioni
e se assorbono grandi potenze elettriche; tuttavia la
tecnologia dual core ha recentemente consentito di
realizzare processori (i Turion X2 di AMD e gli Intel
serie Core/Core Duo) che erogano buone prestazioni
anche a basse frequenze di lavoro, ciò ha avuto l’effetto di ridurre significativamente il gap di performance
rispetto ai desktop.
Anche le schede video per portatili hanno fatto notevoli progressi, ma rimangono lontane dai livelli di
prestazioni possibili con i più potenti sistemi grafici
per ambiente desktop. Altre limitazioni vengono dal
fatto che quasi tutte le interfacce sono integrate sulla
scheda madre. In particolare è vero specialmente su
palmari e ultraportatili, in cui è difficile o impossibile
sostituirle per un upgrade. Questo vale, per esempio,
per le porte USB e Firewire, per la scheda di rete wired
o wireless, per la funzionalità Bluetooth: qualora compaia una nuova revisione di uno o più di questi standard, potrebbe non essere fattibile un upgrade selettivo della relativa circuiteria, ma si sarebbe costretti a
ricorrere a dispositivi esterni, ammesso che esistano
(occupando però preziose porte di espansione), oppure a sostituire l’intera macchina. Fortunatamente,
nei portatili di maggiori dimensioni, alcune delle interfacce citate sono realizzate su piccoli moduli zoccolati di tipo standard (esempio: MiniPCI) che permettono almeno teoricamente l’acquisto aftermarket
e la sostituzione dell’accessorio.
Il PC snello per la rete, il network computer
Quando il computer è destinato all’utilizzo in ambito di rete, con connessione a server remoti che erogano tutti i servizi, inclusa, non di rado, la stessa esecuzione delle applicazioni, si parla di Network Computer,
o di postazione per terminale Internet. La struttura di
un computer di questo tipo può semplificarsi grazie
all’abolizione o forte riduzione della memoria di massa locale e alla riduzione della potenza di calcolo della CPU. Entrambi queste componenti dell’architettura, infatti, in un Network Computer non devono più
sopportare lo stesso carico di lavoro che li interesserebbe in un normale PC o in una workstation. Ciò che
il Network Computer deve poter fare è soprattutto
funzionare come terminale, ossia raccogliere l’input
dell’utente (tastiera, mouse e così via), trasmetterlo
al server, su cui avvengono le fasi di elaborazione ed
eventuale memorizzazione, e ricevere i risultati per
presentarli su schermo o via audio.
Schede madri
Come già accennato a proposito della struttura fisica di un computer, la scheda madre, o motherboard, è
un circuito stampato multistrato di grandi dimensioni e di notevole complessità costruttiva, adagiato sul
fondo del contenitore del computer.
Le principali funzioni integrate nella motherboard
Essa riveste la duplice funzione di ossatura meccanica (per l’ancoraggio delle altre componenti) e di
sistema di interconnessione elettrica (per lo scambio
di segnali fra le stesse componenti). In virtù di que-
Lezione 1
sta doppia natura, potrebbe essere descritta come la
“spina dorsale” del computer.
La scheda madre ospita direttamente la CPU e i
chip che funzionano da intermediari fra la CPU e la
memoria e quelli che la collegano al bus di espansione ed alle periferiche.
In qualche caso sulla motherboard può essere presente una certa quantità di memoria ad alta velocità
(cache memory) destinata a ospitare i dati più frequentemente usati dalla CPU, per evitare di recuperarli dalla relativamente lenta RAM ogni volta che servono. In questo senso tale memoria veloce funziona
come una sorta di “nascondiglio” (“cache”: di qui il
nome) di dimensioni relativamente piccole, contenente informazioni usate spesso.
Una certa quantità di cache (cache di primo livello,
o L1 cache) è compresa nell’unità di calcolo del processore, ma per motivi tecnologici può essere dispendioso o difficile integrarne a sufficienza.
Per questo i processori spesso comprendono una
zona circuitale ben definita in cui trova posto altra cache (cache di secondo livello, o L2 cache) di dimensioni molto maggiori rispetto alla L1 anche se in qualche caso operante a frequenza più bassa.
Soprattutto nel passato, poteva essere la motherboard e non la CPU a ospitare questa cache L2, oppure, con processori attuali che sono quasi sempre dotati di L2 integrata, sulla motherboard può esservi un
ulteriore livello di cache, la L3, o saldata direttamente sulla scheda madre o ospitata su un modulo a essa
collegato attraverso un socket di tipo particolare.
Appositi connettori, detti socket, offrono alla sede
la CPU e per uno o più moduli di memoria RAM, mentre altri connettori, detti slot, servono per ospitare
una o più schede di espansione opzionali.
Normalmente, parlando di motherboard, il termine
“socket” viene usato per denotare connettori piani a
matrice quadrata ad alta densità di contatti (pin), destinati ad accogliere circuiti il cui dialogo con il resto
della macchina avviene mediante un gran numero di
segnali ad altissima frequenza e con un elevato parallelismo (per esempio, un socket per CPU può contare anche 940 pin e attraverso di esso il processore
può scambiare con l’esterno 128 bit per ogni ciclo di
clock). In qualche caso il termine socket è usato anche per i connettori dei moduli di memoria RAM, nonostante la loro topologia sia lineare anziché a matrice quadrata piana.
Data l’estrema importanza dei dispositivi che ospitano, quasi sempre i socket sono dotati di un dispositivo meccanico (ganci, levette di sgancio, riscontri)
per evitare lo sfilamento accidentale del modulo o
chip da essi ospitato e per garantire che il contatto sia
estremamente saldo e senza incertezze da cui potrebbero derivare sporadici malfunzionamenti per la macchina. Il contesto logico di interconnessione (bus) fra
CPU e memoria, ossia il “percorso” lungo il quale troviamo dei socket come connettori, è spesso chiamato
“Front side bus” (FSB) e con tecnologie attuali opera
a frequenze dell’ordine di 400-1000 MHz.
I componenti hardware di base
della scheda madre
Il termine “slot” invece si riferisce normalmente
a connettori rigorosamente lineari, con una densità
di pin spesso inferiore rispetto a quella dei socket
per la memoria, un numero di pin inferiore rispetto
a quello dei socket per CPU e una frequenza di lavoro più bassa rispetto a quella dell’FSB, dell’ordine di
33-133 MHz.
Dato che le esigenze sono meno estreme, le specifiche di funzionamento degli slot possono così essere
IT administrator - Hardware
Un tipico esempio
di motherboard ATX.
In senso orario,
riconosciamo i connettori
per il processore (1) e
RAM (3), il northbridge
chip (2), il connettore di
alimentazione ATX (4),
i connettori IDE P-ATA e
S-ATA (5), il southbridge
chip (6), gli slot PCI
(7), gli slot PCI Express
1x e 16x (8), le porte
di connessione (USB,
Ethernet, parallela,
seriale, audio, PS/2) (9)
meno stringenti di quelle per i socket, pur restando
estremamente precise dal punto di vista dimensionale ed elettrico per assicurare la necessaria compatibilità con prodotti di fabbricanti diversi.
I socket per la RAM sono in genere non più di quattro per un personal computer e nella stragrande maggioranza, su una data motherboard, sono tutti dello
stesso tipo (non è cioè possibile la coabitazione di
diversi tipi di memoria). Gli slot invece, come vedremo più avanti, possono essere di vari tipi diversi, differenziati a seconda del tipo di scheda da ospitare o
anche solo per garantire la compatibilità con schede
di espansione di fabbricazione meno recente. Sempre
sulla motherboard trova posto la circuiteria di controllo per molte porte di connessione, oltre alle porte
stesse: porte USB e Firewire, porta seriale e parallela,
porte PS/2 per mouse e tastiera; in qualche caso sono
integrati su motherboard anche il sistema audio con
le relative porte e il sistema grafico con il connettore
VGA. La motherboard svolge anche un ruolo centrale
nella distribuzione dell’alimentazione a tutti i componenti del PC. Un fascio di cavi esce dall’alimentatore
e si impegna in un apposito connettore a 20 o 24 pin
sulla motherboard e da qui le correnti vengono rese disponibili a tutti i circuiti attivi della macchina
(CPU, moduli RAM, schede di espansione, circuiteria
integrata su motherboard) e ad alcune ventole di raffreddamento, con l’unica eccezione delle unità disco
e per altre ventole per le quali vi è un cavo di alimentazione diretto.
Sulla motherboard trovano posto anche il chip di
memoria che contiene il BIOS, il programma di controllo e configurazione di cui parleremo fra poco, e la
batteria tampone al Litio, a forma di moneta, che assicura il mantenimento delle impostazioni del BIOS
anche a computer spento.
1.2.1.3 Conoscere i
componenti hardware
di base della scheda
madre, quali: zoccoli
d’innesto per CPU
(slot/socket),
chipset, cache
esterna, bus di
sistema, porte di
connessione, slot
d’espansione ecc.
1.2.1.4 Essere in
grado d’identificare i
principali componenti
hardware della
scheda madre
1.2.2 Tipologie
e differenze.
Identificazione dei
componenti hardware
della scheda madre
I componenti hardware della
scheda madre
Pur essendo tutte dotate
delle componenti fin qui citate, le schede madri possono
differenziarsi notevolmente
in funzione della disposizione di socket, slot e connettori sul circuito stampato, nonché delle dimensioni fisiche
complessive. Si parla così, per
le motherboard, di “fattore di
forma” (form factor).
Le più vecchie schede madri per Personal Computer, per
esempio, erano realizzate secondo le norme PC/XT di IBM e subito diventate uno
standard di fatto per tutti i produttori di “cloni”. La
PC Open 9 www.pcopen.it
Una motherboard in
formato ATX
IT administrator - Hardware
1.2.2.1 Conoscere
le diverse tipologie di
formato
delle schede madri e
le relative differenze
di standard, quali: AT,
ATX, BTX, LPX,
NLX e via dicendo
1.2.2.2 Conoscere
le differenti
connessioni su
schede madri con
specifiche diverse
1.3 Il BIOS
1.3.1 Caratteristiche
di base
1.3.1.1 Sapere
cos’è il BIOS,
dov’è fisicamente
memorizzato, a quali
funzioni di sistema
presiede
prima evoluzione di queste specifiche ha dato luogo
nel 1984 al fattore AT (Advanced Technology), caratterizzato da grandi dimensioni (305 mm di larghezza),
un’alimentazione da 192 watt con due connettori da 6
pin ciascuno e un nuovo sistema per il raccordo con
l’interruttore di alimentazione; il pannello posteriore
della motherboard (backplate) prevedeva un’unica
connessione, quella verso la tastiera.
Tutte le altre porte dovevano essere fornite dal
backplate delle varie schede di espansione ISA oppure essere realizzate con connettori avvitati al cabinet
e connessi alla motherboard mediante cavi volanti.
Nel 1985 fu proposta una variante leggermente più
piccola di questo standard, detta Baby AT, che riscosse un successo molto maggiore e con cui ancora oggi sono compatibili gli involucri fisici per PC (case o
chassis).
Nel 1995 fu lanciato il formato ATX – acronimo di
Advanced Technology Extended - che ancora oggi, a
più di 10 anni di distanza, rimane il più diffuso sul mercato. Le novità rispetto all’AT furono numerose:
• nell’ATX, l’interruttore di alimentazione è collegato
alla motherboard e non all’alimentatore;
• il connettore di alimentazione, monoblocco da 20
pin affiancabile da estensioni opzionali da 4 pin o
da 8 pin nel caso di CPU recenti ad alte prestazioni
con elevato fabbisogno di energia come il Pentium
4, deve fornire anche una tensione di 3.3V, il che
elimina la necessità da parte della motherboard di
integrare i circuiti analogici necessari per derivare
tale tensione dai 5V forniti in precedenza dall’alimentatore AT;
• la disposizione reciproca delle schede e della CPU
è diversa; il pannello posteriore comprende un
gran numero di connessioni solidali con la motherboard (senza cavi volanti) e con una disposizione
rigidamente definita, sebbene alcune porte opzionali possano mancare.
Il back panel ATX in particolare definisce dove debbano trovarsi, se presenti, le porte PS/2 per mouse e
tastiera, le porte jack dell’audio integrato, la porta DB15 della grafica integrata, la porta RJ-45 della scheda
di rete integrata, le porte a 9 e 25 poli per seriale e parallela, le 2 o più porte USB, la porta Firewire.
Per le parti in plastica dei connettori PS/2 di tastiera e mouse e per quelli jack 3.5” del sistema audio sono specificati anche i colori, onde facilitare il riconoscimento di porte altrimenti uguali fra loro.
Varianti dell’ATX lanciate successivamente sono la
Mini-ATX e la Micro-ATX, che rappresentano tentativi
di miniaturizzazione pensati per consentire la realizzazione di PC sempre più piccoli, fra cui perfino i cosiddetti sistemi “cube-style” da salotto.
Nel 2003 Intel ha lanciato il nuovo fattore di forma
BTX, pensato soprattutto per razionalizzare la venti-
Il Mini-ITX del 2002 è
un form factor originale
utilizzato in sistemi di
dimensioni ridotte
PC Open 10 www.pcopen.it
Lezione 1
lazione e i cablaggi, due questioni rilevanti soprattutto nelle ultime serie di schede grafiche e processori
ad alte prestazioni che possono assorbire elettricamente, e quindi dissipare termicamente, anche più
di 100W di potenza ciascuno. Questo fattore di forma non ha avuto il successo sperato, anche perché
le attuali tendenze sembrano indicare un ritorno alla
ragionevolezza: anziché inventare motherboard adatte a facilitare la dissipazione di calore da processori
sempre più “caldi” ed energeticamente inefficienti, ci
si dedicherà a risolvere il problema alla radice, abbattendo proprio i consumi elettrici delle CPU e facendo
venir meno molti dei presupposti dietro allo sviluppo
del nuovo standard BTX.
Lo standard LPX è un fattore di forma pensato per
consentire la realizzazione di PC sottili, o Low Profile
(da cui deriva l’acronimo).
Questo risultato è ottenuto montando le schede
di espansione non perpendicolarmente alla motherboard – ciò che comporterebbe automaticamente
uno spessore minimo di una quindicina di centimetri circa – ma parallelamente ad essa, grazie all’espediente di montare una piccola scheda di raccordo, o
riser board, che “innalza” (to rise) gli slot e li orienta
orizzontalmente.
Lo standard NLX è un altro standard low profile
basato su riser board, come l’LPX. Meritano un cenno per la loro originalità gli standard ITX del 2001, da
215x191 mm, il Mini-ITX del 2002, da 170x170 mm, e
il Nano-ITX del 2004, da appena 120x120 mm. Questi
form factors consentono la realizzazione di sistemi
minuscoli ma dotati di tutte le principali funzioni ed
altamente integrati, utilizzabili fra l’altro per realizzare sistemi embedded o PC destinati all’installazione
in auto.
Il BIOS
Anche se il funzionamento generale della macchina
è governato dal sistema operativo (Operating System,
OS), come Windows o Linux, le particolarità costruttive della macchina fanno sì che l’OS, per svolgere
alcuni compiti basilari su cui costruire le operazioni
più “ricche” e complesse messe a disposizione delle
applicazioni, debba rivolgersi a un interlocutore in
grado di parlare una “lingua“ standard, nascondendo
i dettagli elettrici e logici specifici dell’hardware della particolare macchina su cui l’OS viene installato e
fatto funzionare.
Questo, disaccoppiando le applicazioni e il sistema
operativo dall’hardware, semplifica la progettazione
dell’OS, da un lato, e permette ai costruttori di computer di avvalersi di una certa libertà progettuale,
dall’altro. Infatti chi progetta Windows non deve più
preoccuparsi di quali segnali elettrici e temporizzazioni è necessario usare nella comunicazione, poniamo, fra il southbridge chip e le porte USB, ma si limita a dialogare con un interlocutore standard. Questo
interlocutore è il BIOS (Basic Input/Output System), un
programma relativamente piccolo ma di fondamentale importanza, sempre più spesso memorizzato su
chip EEPROM (memoria programmabile a sola lettura
cancellabile elettricamente: Electrically Erasable Programmable Read Only Memory detta anche memoria
flash ). Il chip del BIOS è fisicamente alloggiato sulla
motherboard e può essere aggiornato senza interventi hardware qualora il fabbricante si accorga di bug
che richiedono una correzione oppure decida di inserire prestazioni aggiuntive. L’aggiornamento del BIOS
è un’operazione che non richiede di intervenire fisicamente sul PC, ma si esegue da software, scarican-
Lezione 1
IT administrator - Hardware
Il BIOS (qui un Award
WorkstationBIOS di
Phoenix Technologies)
presenta generalmente
un menu principale da cui
sono raggiungibili tutte le
varie categorie di opzioni
Le impostazioni di base
del BIOS riguardano
fondamentalmente data,
ora e unità disco
do dal sito del produttore una utility che gestisce la
cancellazione e riscrittura della memoria e un nuovo
“file immagine” che andrà a rimpiazzare l’attuale programma memorizzato nel BIOS chip. È molto importante che durante l’operazione non si verifichino interruzioni o interferenze software di alcun genere, dal
momento che la corretta programmazione del nuovo
BIOS ne potrebbe risultare compromessa e in assenza di un BIOS valido il PC non soltanto potrebbe non
avviarsi più, ma, quel che è peggio, potrebbe perdere
la capacità di aggiornarsi, richiedendo un intervento hardware. In questo malaugurato caso, qualora il
chip BIOS sia fissato in uno zoccolo, ossia fissato alla motherboard in modo non irreversibile, potrà essere sufficiente sostituirlo con un altro dal contenuto valido. In caso contrario, essendo esclusa la possibilità di un rimpiazzo, potrebbe essere impossibile rimediare al problema se non sostituendo l’intera
motherboard.
Il BIOS sovraintende anche a regolazioni e impostazioni di funzionamento della macchina che per il sistema operativo rimangono completamente trasparenti.
Un esempio è l’impostazione della frequenza di lavoro
della memoria RAM: OS e applicazioni assumono che
la RAM esista e si sentono liberi di scriverla e leggerla, ma non possono variare le caratteristiche elettriche e logiche dell’interfaccia fra CPU e memoria. Altri
esempi sono l’impostazione della frequenza di lavoro
della CPU; l’abilitazione o disabilitazione della cache
memory; l’abilitazione o disabilitazione di alcune periferiche integrate sulla motherboard come le porte
USB, il controller dei dischi, la scheda grafica, la scheda audio; l’identificazione esatta e la configurazione
delle unità disco presenti; e così via.
Power-On Self Test (POST) e comprende di solito il
test della memoria per escludere eventuali guasti, il
riconoscimento delle unità disco collegate, il controllo di presenza della tastiera, il riconoscimento e attivazione alla giusta frequenza della CPU e delle schede
grafiche installate, e così via. Qualora venisse riscontrato qualche inconveniente in qualcuna di queste
componenti, il POST si arresterebbe segnalandolo e
permettendo di entrare nella utility di configurazione
del BIOS, oppure di riavviare il PC, oppure ancora di
rimediare al problema (per esempio: tastiera scollegata) e ritentare l’avvio.
L’utility di configurazione del BIOS è detta BIOS
Setup; qualche volta è detta anche CMOS Setup, in
quanto le impostazioni in essa disponibili, per essere “ricordate” anche quando l’alimentazione viene a
cessare, vengono salvate su memoria non volatile oppure, più spesso, su un’area di memoria volatile realizzata in tecnologia CMOS (da cui il nome) salvata da
una batteria tampone. Tale batteria ha l’aspetto della
classica “monetina” visibile in apposita sede su quasi
tutte le motherboard attuali, spesso posizionata nei
pressi del chip EEPROM o flash che contiene il BIOS.
Le impostazioni di base settabili dal BIOS
Le impostazioni del BIOS sono generalmente suddivise in categorie; le opzioni di base e le “advanced
options” sono presenti su tutte le macchine, mentre le
altre categorie sono disponibili a seconda della configurazione hardware e della versione di BIOS installata.
Le impostazioni di base comprendono ad esempio:
• data e ora, presenza e tipo di unità floppy disk, presenza, tipo, geometria e capacità delle unità hard
POST, CMOS e firmware
Di tutto questo si può incaricare il BIOS, che, interloquendo con il northbridge chip e altra circuiteria
presente sulla motherboard, può regolare aspetti di
dettaglio che il sistema operativo non può o non “vuole” vedere, perché troppo di dettaglio e troppo specifici dell’hardware della macchina, sebbene siano estremamente rilevanti per le
prestazioni (una cattiva regolazione della frequenza di lavoro di memoria e bus, una
disattivazione della cache L2, un abbassamento del
clock del processore possono ridurre la velocità dei
programmi in modo anche sostanziale).
All’accensione il BIOS espleta anche un’altra delle sue funzioni, eseguendo una verifica del corretto
funzionamento di tutte le componenti hardware sotto il suo diretto controllo e per le quali è deputato a
conoscere la configurazione. Questa verifica è detta
1.3.1.3 Conoscere
quali sono le
impostazioni di
base settabili dal
BIOS
Il chip di memoria
contenente il BIOS
affiancato dalla batteria
tampone in formato
“moneta” che si
occupa di mantenere
le impostazioni
immagazzinate dal BIOS
nella memoria volatile
CMOS
1.3.1.2 Comprendere
il significato degli
acronimi: POST,
CMOS e dei termini:
setup, firmware.
Sapere a quali
funzioni di sistema
presiedono
Le opzioni avanzate del
BIOS sovraintendono
a questioni spesso
importanti quali la
sequenza di periferiche
da considerare per
l’esecuzione del
bootstrap, la cache della
CPU, la semplificazione
del POST per accelerare
il boot, l’autorepeat della
tastiera e così via
PC Open 11 www.pcopen.it
IT administrator - Hardware
Lezione 1
Il funzionamento della
RAM è governato da
5 parametri principali:
la frequenza di lavoro
e i valori di RAS, CAS,
RCD e RP. Alcuni BIOS
permettono di impostare
selettivamente questi
valori per adattare il
funzionamento del
sistema al tipo di
memoria installata
Il controller RAID, se
presente, è di solito
configurabile da una
apposita sottopagina
del menu Integrated
Peripherals
disk,
• presenza e tipo di unità ottiche (CD ROM, DVD
ROM, combo drive, masterizzatori)
Va detto che il BIOS non può riconoscere automaticamente le unità floppy, mentre quelle IDE o SATA
(hard disk o unità ottiche) possono essere anche riconosciute in modo completamente automatico. Nel
caso specifico degli hard disk il riconoscimento automatico riguarda anche il numero di cilindri, testine e
settori per traccia (i parametri che definiscono la cosiddetta geometria dell’hard disk e quindi, in ultima
analisi, anche la sua capacità). In casi particolari, tuttavia, può essere utile impostare manualmente i parametri di geometria, come pure selezionare la modalità
di indirizzamento dei settori sul disco (per esempio la
modalità LBA, Large Block Addressing, o il supporto
per dischi di capacità superiore a 137 GB, con il cosiddetto modo 48-bit LBA).
Le impostazioni avanzate comprendono
• Abilitazione di una versione “rapida” del POST
• Impostazione dell’ordine con cui deve essere tentato il boot dalle varie periferiche possibili: floppy,
USB, ZIP o simili, hard disk, CD ROM
• Abilitazione o disabilitazione della cache L1 o L2
della CPU
• Parametri di auto-repeat per la tastiera (ritardo di
innesco e periodo di ripetizione)
• Abilitazione o disabilitazione della tecnologia
Hyper Threading per CPU Pentium che la supportano
• Impostazioni riguardanti l’eventuale controller SCSI, se installato
• Abilitazione di una protezione antivirus, efficace
Un’apposita schermata
del BIOS, “Integrated
Peripherals”, è dedicata
alla gestione delle
periferiche integrate
direttamente su scheda
madre e consente di
configurarle e attivarle/
disattivarle
PC Open 12 www.pcopen.it
solo contro certi comportamenti riconoscibili di
certi virus
Altre opzioni avanzate ancora più specifiche,
che regolano il funzionamento di CPU, RAM e chipset
(Northbridge e Southbridge) vanno solitamente sotto
il nome di “advanced chipset options” e riguardano:
• Frequenza di lavoro della CPU, determinata dalla
frequenza del bus FSB, o da quella verso la memoria, moltiplicata per un fattore numerico (detto appunto “moltiplicatore”)
• Configurazione della memoria e dei suoi parametri
di lavoro, come RAS, CAS, RCD e RP
• Impostazioni relative al caching del BIOS su RAM
(per velocizzarne il funzionamento)
• Impostazioni relative alla mappa della memoria:
per esempio, spazio riservato alla comunicazione
sul bus AGP
• Frequenza di lavoro dell’eventuale bus AGP per
schede grafiche (per esempio: 8x)
Un cenno a parte merita la questione della gestione
delle periferiche Plug and Play su bus PCI (PnP/PCI).
La locuzione “Plug and Play” si riferisce al fatto che
queste schede d’espansione sono progettate per essere riconosciute e configurate automaticamente semplicemente perché sono state installate fisicamente
nel sistema.
In passato questo non era sufficiente, perché oltre
all’installazione nello slot era anche richiesta una attività di regolazione fisica della posizione di alcuni ponticelli (jumper) sulla scheda per definire quali risorse
di sistema (in primis, gli interrupt, o IRQ, e i canali di
accesso alla memoria, o DMA) fossero necessarie.
La coabitazione di più schede sul bus, con il rischio
di sovrapposizioni e conflitti nella scelta di tali impostazioni, rendeva difficoltosa un’esatta definizione di
questi assegnamenti. Il sistema plug and play mira a
risolvere il problema, effettuando automaticamente
una scelta che garantisca al tempo stesso di evitare
reciproche interferenze fra le schede. Il BIOS gioca
un ruolo di primo piano in questo processo: proprio
a questo sono dedicate alcune impostazioni nell’apposita sezione “PNP/PCI Configuration”, in cui è possibile
• stabilire se è installato un sistema operativo in grado di supportare il PNP,
• abilitare o disabilitare l’assegnazione automatica
di IRQ e DMA, oppure scegliere l’assegnazione manuale.
È spesso presente anche un sottomenu “Integrated
Peripherals” che consente la gestione, configurazione
e abilitazione (o disabilitazione) delle periferiche inte-
Lezione 1
IT administrator - Hardware
Le impostazioni di
gestione energetica
consentono di ridurre
i consumi elettrici
e prolungare la vita
utile dei componenti
della macchina, oltre
a determinare l’esatta
politica di funzionamento
del pulsante di
accensione (standby,
suspend, switch off).
grate sulla scheda madre.
Per esempio, la scheda video, la scheda audio, il
controller USB, il controller per floppy disk, le porte seriali e parallele, la porta a infrarossi. Su alcune
schede è presente anche un controller RAID per aumentare le prestazioni o l’affidabilità dei dischi fissi
utilizzandone un maggior numero; in tal caso, questo
menu generalmente contiene anche le regolazioni relative a tale controller. Un apposito menu Power Management Setup permette di abilitare vari possibili modi
di sospensione (a seconda di quali sono supportati
dal chipset), di far sì che gli hard disk si disattivino
automaticamente in caso di inattività prolungata, di
stabilire esattamente che cosa debba avvenire quando viene premuto il pulsante di spegnimento mentre
il PC è acceso: sospensione, standby, oppure spegnimento vero e proprio.
Se è presente un menu “PC Health Status” esso permette di osservare le temperature e le tensioni elettriche rilevate in vari punti della motherboard, nonché
di specificare le soglie di temperatura oltre le quali le
varie ventole di raffreddamento debbano attivarsi a
velocità media o alta o disattivarsi.
Verifica e aggiornamento del BIOS
Come tutti i programmi anche il BIOS può contenere errori ed essere soggetto a perfezionamenti e miglioramenti. Pertanto è prevista la possibilità di aggiornarlo, per esempio in caso di malfunzionamenti o
per aggiungere il supporto di qualche nuova caratteristica. Anche se i BIOS in circolazione sono sviluppati da poche software house specializzate, fra le quali
Phoenix Technologies con il suo diffusissimo Award
BIOS, l’aggiornamento va scaricato dal sito del pro-
All’accensione il BIOS
visualizza una serie di
informazioni utili per
identificare la versione
esatta. Sarà così
possibile scegliere un
aggiornamento adatto
per scaricarlo, quando
necessario, dal sito
del produttore della
motherboard
duttore della motherboard in quanto il BIOS potrebbe
avere subito degli adattamenti specifici per permetterne l’uso su uno specifico hardware. Per scaricare
l’aggiornamento del BIOS dal sito del produttore è
necessario conoscere con esattezza il modello della
propria motherboard e la versione del BIOS attualmente installato. A tale scopo le informazioni di versione e modello sono visualizzate dal BIOS all’accensione, per alcuni secondi, per permettere all’utente
di annotarle.
I codici di versione del BIOS possono essere più
d’uno, a causa del fatto che una determinata versione di base del BIOS, rilasciata dal produttore del BIOS,
con un certo insieme di funzionalità standard, menu
e impostazioni, e identificata da un suo codice di versione (come v6.00PG, in alto a destra nell’immagine),
per poter essere impiegata su una specifica motherboard potrebbe aver richiesto alcune modifiche per
adattarla alle specifiche caratteristiche elettriche e
logiche del chipset, delle periferiche integrate e degli
slot e socket presenti sulla scheda madre.
Questa personalizzazione dà quindi luogo a una
versione di BIOS specifica, o “custom”, frutto del lavoro di adattamento effettuato congiuntamente dal
produttore della motherboard e da quello del BIOS di
base; l’identificazione precisa di tale versione è data
di solito da un’altra stringa, spesso contenente anche
la data, riportata in altra zona dello schermo durante
il processo di start-up (secondo riquadro in figura).
Infine, il codice esatto di versione e revisione hardware della motherboard, da non confondersi con
quello software relativo al BIOS installato, è generalmente anch’esso riportato sulla schermata di POST,
di solito in fondo allo schermo (terzo riquadro in basso in figura). L’aggiornamento del BIOS è un’operazione delicata che va effettuata in caso di reale necessità
e con grande cura. Per effettuare l’aggiornamento è
necessario scaricare, insieme all’immagine del BIOS
stesso, un programma in grado di effettuare la cancellazione della memoria flash o EEPROM in cui è memorizzato l’attuale BIOS e la successiva scrittura della
nuova versione.
Anche tale programma è scaricabile dal sito del
produttore della motherboard. È importante seguire
scrupolosamente le istruzioni per il suo utilizzo; durante il funzionamento del programma, inoltre, è bene
evitare, nei limiti del possibile, qualsiasi interruzione
della riprogrammazione del BIOS.
PC Open 13 www.pcopen.it
1.3.2 Aggiornamento
1.3.2.2 Sapere come
verificare l’attuale
numero di versione
del BIOS.
1.3.2.3 Essere in
grado di verificare o
modificare i settaggi
del BIOS relativi alle
impostazioni delle
periferiche PnP
Il menu PC Health
Status, se presente,
consente il monitoraggio
di voltaggi e temperature
in vari punti della
motherboard, e permette
di impostare le soglie di
temperatura oltre le quali
debbano attivarsi le varie
ventole di raffreddamento
Lezione 2
IT administrator - Hardware
A scuola con PC Open
Come funzionano le diverse
classi di processori
Nella seconda puntata prendiamo in considerazione
il cuore del PC, il microprocessore. Funzionalità,
architetture, alloggiamenti a confronto per capire come
funzionano le CPU di Marco Mussini
ome già accennato nella I puntata, non sarebbe azzardato affermare che il “cervello” del Personal
Computer è il suo
processore: un componente che si incarica di eseguire ad
elevatissima velocità le istruzioni che
compongono i pro- Il microprocessore, o CPU (Central
grammi, il sistema Processing Unit), è il vero e proprio
operativo, i driver di “cervello” di ogni PC
periferiche, sovraintendendo sia all’elaborazione dei dati, sia all’interscambio di dati con
l’esterno, sia al controllo delle periferiche.
In molti casi, importanti compiti che l’hardware
deve eseguire per un regolare funzionamento della
macchina vengono portati avanti in modo autonomo
da apposita circuiteria specializzata, come il north
bridge, il south bridge o i chip della scheda grafica;
ma quasi sempre è il processore a dover intervenire
per sovraintendere a questi processi, ossia per innescarli, interromperli, regolarli, monitorarli.
Ancora, quando una periferica in grado di scambiare dati con l’esterno ha ricevuto dei dati da elaborare, è sempre il processore a essere informato attraverso un “interrupt”, una sorta di chiamata urgente
che lo forza a interrompere qualunque cosa stia facendo e a occuparsi dell’evento che si è verificato, di
solito eseguendo un apposito programma di controllo (device driver).
C
Caratteristiche principali
Tutti i processori moderni hanno una struttura
logica che comprende un certo numero di parti fondamentali:
• ALU (Arithmetic – Logic Unit). La ALU si occupa di eseguire le operazioni aritmetiche su numeri interi e quelle logiche.
Tali operazioni comprendono ad esempio, oltre
alle quattro operazioni, i confronti, i salti da un
punto all’altro del programma, le decisioni, i trasferimenti di dati fra aree di memoria, gli scambi
di dati da e verso il bus di sistema.
PDF DEL CORSO
NEL DVD
Calendario delle lezioni
Lez 1: la scheda madre e il BIOS
Lez 2: i processori
Lez 3: la RAM
Lez 4: bus e risorse di sistema
Lez 5: interfacce
Lez 6: memorie di massa
Lez 7: i monitor e le schede grafiche
Lez 8: le stampanti
Lez 9: hardware di rete
In collaborazione con
Lez 10: alimentatori
e installazione nuovo
hardware
Lez 11: risoluzione dei
problemi
• FPU (Floating
Point Unit, o
unità a virgola mobile). La
FPU aggiunge
al processore la capacità
di gestire con
elevate prestazioni calcoli aritmetici,
trigonometrici, logaritmici e trascendenti su numeri in virgola mobile. In
passato, per
ragioni di costo, la maggior parte dei processori era priva della FPU e tali operazioni dovevano quindi essere simulate in software basandosi solo sulle capacità della ALU.
Per eseguire tale tipo di calcoli, quindi, di
fatto venivano eseguiti veri e propri sottoprogrammi di durata non trascurabile.
Una FPU può invece eseguire queste istruzioni
direttamente in hardware, in tempi ridottissimi.
I calcoli in virgola mobile sono di particolare importanza soprattutto per la grafica 3D, per il cal-
PC Open 15 www.pcopen.it
Materiale didattico
progettato per EUCIP
IT Administrator
segnalato da AICA
Modulo 1 - Hardware
“AICA, Licenziataria
esclusiva in Italia
del programma
EUCIP (European
Certification
of Informatics
Professionals)
riconosce che il
materiale didattico
segnalato è
strutturato in
modo coerente con
l’organizzazione dei
contenuti prevista
dai documenti
EUCIP di riferimento.
Di conseguenza
AICA autorizza sul
presente materiale
didattico l’uso
dei marchi EUCIP
(registrato dal
CEPIS Concil
of European
Professional
Informatics
Societies) ed AICA
protetti dalle leggi
vigenti.”
Struttura a blocchi di
un microprocessore. In
evidenza ALU, registri,
FPU, cache memory e
interconnessione al bus
1.4.1 Caratteristiche
principali
IT administrator - Hardware
colo scientifico e per l’elaborazione video e audio
con compressione dati ed analisi nel dominio delle frequenze.
I registri per applicazioni
generiche (General
purpose registers, GPR)
caratterizzano in modo
forte l’architettura di
una famiglia di CPU;
è in base alla loro
ampiezza che si parla,
per esempio, di “CPU a
32 bit o a 64 bit”. Per
esempio, nei processori
x86 con estensioni 64
bit, i registri GPR sono
cresciuti di numero
e passati a 64 bit di
larghezza
• Registri. Queste particolari celle di memoria incorporate nel processore lavorano ad altissima
velocità, vengono adoperate come aree d’appoggio per i dati intermedi dei calcoli e il loro uso
non comporta alcun ritardo o attesa per la CPU.
Anche se molte CPU moderne possiedono anche
istruzioni in grado di trattare confronti e calcoli
operando solo su dati direttamente prelevati dalla RAM, i processori sono costruiti in modo tale
che la maggior parte delle operazioni di calcolo e
confronto deve avvenire, per ragioni di prestazioni o anche solo per semplicità costruttiva, fra registri oppure fra un registro e una cella di memoria.
I registri rappresentano infatti per i programmi in
codice macchina quello che le variabili rappresentano per linguaggi a maggior livello di astrazione
come il C.
In generale, un maggior numero di registri favorisce un aumento delle prestazioni, in quanto il programma può essere tradotto dal compilatore in codice macchina organizzato in modo tale da tenere
tutte le principali variabili nei registri fisici della
CPU, senza bisogno
di lente operazioni di
spostamento dati da
e verso la memoria.
Un altro modo per
aumentare le prestazioni è l’aumento
delle dimensioni dei
registri, che consente di effettuare calcoli su dati numerici di grande valore
assoluto, oppure su
grandi gruppi di bit, in un sol colpo anziché per
parti.
Per esempio, nei moderni processori x86 dotati
di estensioni a 64 bit, denominate AMD64 da AMD
o EM64T da Intel, i registri di uso comune sono
stati portati da 32 a 64 bit e aumentati di numero.
Anche le speciali istruzioni SSE per il calcolo
matriciale e vettoriale, previste dall’assembler
x86, per analoghe ragioni di efficienza lavorano
su ben 16 registri di ampie dimensioni (128 bit).
Per contrasto, 30 anni fa, il celeberrimo processore 6502 su cui si basavano l’Apple II, il Commodore
64 e tante altre macchine di larghissima diffusione, disponeva di un unico registro utilizzabile per
i calcoli: il cosiddetto accumulatore, che doveva
necessariamente giocare il ruolo di addendo o fattore in ogni calcolo aritmetico, confronto o spostamento di dati effettuato dal processore.
È immediato riconoscere che con un’impostazione
del genere il programma era costretto a sprecare
molte istruzioni solamente per spostare i dati da
e verso l’accumulatore prima di poter svolgere un
qualsiasi compito utile. In sostanza, era come se
parte dei cicli di cloc venisse sprecata, o, in ultima analisi, come se il cloc fosse stato più basso.
Con il gran numero di ampi registri a disposizione,
i processori moderni possono invece sfruttare al
massimo le proprie capacità di calcolo avvicinandosi alle massime prestazioni teoriche.
• Cache memory. La cache memory è una regione di
memoria ad altissima velocità in cui il processore
“parcheggia” i dati usati di recente, nell’ipotesi che
PC Open 16 www.pcopen.it
Lezione 2
gli stessi dati possano servire di nuovo a breve termine. Questa è in effetti una circostanza molto frequente: la maggior parte del tempo di esecuzione
dei programmi viene spesa nei cosiddetti cicli, ossia
gruppi di istruzioni che sono ripetute un gran numero di volte per svolgere compiti aggregati costituiti da innumerevoli compiti elementari da reiterare fin tanto che una determinata condizione è vera.
Durante questi cicli è estremamente probabile che
il programma debba accedere ogni volta agli stessi
dati oppure a dati fortemente correlati con i dati
trattati nelle iterazioni precedenti.
Se la cache memory non esistesse, il processore
sarebbe costretto a recuperare ogni volta gli stessi
dati richiedendoli alla memoria RAM attraverso il
bus di sistema. La memoria RAM, tuttavia, è caratterizzata da una frequenza di funzionamento assai
bassa in confronto alla velocità operativa interna
del processore. Costruire una RAM veloce quanto
il processore, ammesso che fosse tecnicamente
possibile, farebbe impennare i costi costruttivi a livelli inaccettabili. La soluzione è quella di interporre fra il processore e la RAM una certa quantità di
memoria con caratteristiche di velocità e capacità
intermedie rispetto a questi due attori. La cache
memory è molto più veloce della RAM ma ha un
costo molto maggiore, pertanto per motivi di costo non se ne può installare una grande quantità.
Fortunatamente, per motivi statistici, gli accessi a
memoria effettuati durante i cicli tendono ad avvenire o sempre nelle stesse locazioni di memoria
o in locazioni vicine fra loro (per esempio, a indirizzi successivi).
Così, anche una quantità di cache relativamente piccola rispetto alla dimensione della RAM totale può bastare per creare per il processore l’illusione di avere a che fare con una RAM estremamente veloce. In passato la cache era esterna al processore, saldata sulla scheda madre,
e per limitazioni elettriche lavorava in genere a
una frequenza pari a una frazione della frequenza di lavoro interna del processore; col tempo i
progressi della tecnologia hanno permesso di integrare anche la cache a bordo del processore,
facendola lavorare alla stessa velocità del core.
Tuttavia la quantità di cache che è possibile ospitare nel processore, per ragioni di spazio e di dissipazione termica, non può mai essere elevata.
Così si è fatto largo il concetto di cache multi-livello: la cache di primo livello, o L1, è quasi sempre
integrata nel processore, lavora a piena frequenza
e ha normalmente dimensioni piuttosto limitate
(per esempio, 32Kbytes suddivisi in 16K per il codice e 16K per le istruzioni); la cache di secondo
livello, o L2, può essere interna o esterna a seconda dei casi, spesso lavora a metà frequenza e ha
dimensioni intermedie fra quelle della L1 e quelle
della RAM (per esempio, 512 Kbytes o 1 MByte).
In alcune architetture server particolarmente sofisticate, con una RAM estremamente estesa, esecuzione contemporanea di moltissimi processi ed
esigenze di alte prestazioni, anche la quantità di
memoria cache L2 non è sufficiente per una buona
copertura statistica della RAM, pertanto esiste anche una cache di terzo livello, con caratteristiche
di capacità e velocità (e costo) ancora più vicine a
quelle della RAM.
• I/O e interconnessione al bus. Come già ricordato
nella prima puntata, il processore non deve soltanto elaborare i dati: è anche necessario, innanzitutto, riceverli dall’esterno, oltre a emettere i risultati
Lezione 2
al termine dell’esecuzione.
Per queste operazioni occorre un canale di comunicazione bidirezionale ad alta velocità, funzionante secondo le necessità del processore e sotto il
suo controllo.
Il processore non è infatti isolato nell’architettura
del PC, ma è interconnesso – spesso attraverso un
north bridge chip e un south bridge chip - al bus
della memoria, al sottosistema grafico e al bus di
espansione. Un apposito blocco logico nella CPU
si occupa proprio di sovrintendere al regolare funzionamento di queste interconnessioni e all’adattamento della frequenza di lavoro.
All’esterno del processore, infatti, il mondo funziona a ritmi decisamente meno frenetici, pertanto occorrono “sale d’attesa” in cui depositare i dati in attesa che possano essere presi in carico dai
dispositivi esterni.
Per ottimizzare l’esecuzione delle istruzioni, queste possono essere esaminate per vedere se il loro
grado di interdipendenza sia sufficientemente basso
da permettere di eseguirle in parallelo senza alterare
la correttezza dei risultati.
Macchine di questo tipo, dotate di più unità di esecuzione elementari operanti in parallelo, sono dette
capaci di esecuzione “superscalare”, poiché in condizioni ottimali riescono ad eseguire contemporaneamente più istruzioni per ogni ciclo di clock.
Un’altra tecnica di velocizzazione dell’esecuzione
si basa sullo smembramento delle istruzioni complesse in una successione di istruzioni elementari,
più semplici e quindi più rapide da eseguire; il “treno” di istruzioni elementari così ottenute viene mandato in ingresso a un circuito di elaborazione strutturato come una sorta di “catena di montaggio” in cui
in ogni “stazione” si esegue,
facilmente e
velocemente,
solo una piccola parte del
compito complessivo. Grazie al fatto che
i compiti sono molto semplici, ogni stazione ha bisogno di un tempo brevissimo
per l’esecuzione, così l’intera catena
di montaggio
può avanzare
IT administrator - Hardware
a un ritmo complessivamente più alto.
Una singola istruzione richiede sempre un tempo
di N nanosecondi per attraversare completamente
la pipeline ed essere completamente eseguita; ma, a
regime, quando la pipeline lunga K stazioni è “piena”
di istruzioni nelle varie rispettive fasi di elaborazione, il periodo di avanzamento è N/K, così, agli effetti esterni, ogni N/K nanosecondi viene completata
l’esecuzione di una istruzione, con un effetto di accelerazione di K volte .
Questa tecnica, detta pipelining, è simile alla situazione che si crea in una catena di montaggio per
autoveicoli: se il lavoro complessivamente richiesto
per assemblare un’auto è di 100 ore, ma questo lavoro viene uniformemente suddiviso e assegnato a 600
stazioni di lavoro, ognuna tratterrà in media il veicolo per un tempo di 10 minuti, e all’uscita della catena
di montaggio, una volta avviato il processo produttivo, uscirà un’auto ogni 10 minuti.
Questo non significa che un’auto richiede 10 minuti di lavoro per essere costruita, ma solo che grazie a una efficiente organizzazione del lavoro, il tempo di ciclo è stato ridotto a 10 minuti, e il flusso, o
“throughput”, diventa di un’auto ogni 10 minuti. Naturalmente per ottenere questo risultato è stato necessario usare 600 volte più risorse a parità di auto
prodotte.
Nel microprocessore “superpipelined” succede
qualcosa di assolutamente analogo: con i progressi
della microelettronica non è stato un problema, nel
giro di qualche anno, aumentare il numero di circuiti per costruire delle pipeline a 10 o anche 15 stadi,
in grado di accelerare enormemente la frequenza di
funzionamento e di conseguenza l’esecuzione delle
istruzioni.
Lo svantaggio delle architetture pipelined sta nel
fatto che ogni deviazione dal regolare flusso sequenziale di esecuzione delle istruzioni, che si verifica
ogni qualvolta nell’algoritmo si incontra una decisione il cui esito può essere un salto a un altro punto
dell’algoritmo o un’uscita dal ciclo in corso, obbliga
il processore a interrompere il funzionamento della
pipeline (eliminando accuratamente gli effetti parziali delle istruzioni in corso di esecuzione) e a riempirla con un nuovo treno di microistruzioni, analogamente a quanto accadrebbe in una catena di montaggio qualora all’improvviso si decidesse di cambiare
il modello da assemblare. Il ritardo con cui questo
nuovo caricamento della pipeline viene effettuato è
detto latenza.
Al fine di ridurre la latenza, in molti processori superpipelined si ricorre all’espediente di affiancare la
pipeline principale con una o più pipeline secondarie che in caso di potenziale deviazione dal flusso di
esecuzione “normale” vengono caricate con le istruzioni che sarebbero incontrate se tale deviazione avvenisse realmente. In questo modo sarà possibile eliminare o minimizzare la latenza in tale circostanza,
poichè non sarà più necessario attendere un nuovo riempimento da zero della pipeline con le nuove
istruzioni. In questa impostazione, il processore tenta comunque di prevedere, in base a considerazioni
statistiche, quale potrà essere il più probabile flusso
di esecuzione del programma, al fine di “scommettere” sull’opzione giusta, che sarà caricata sulla pipeline principale. Questo tipo di comportamento basato su previsioni del probabile andamento dell’algoritmo (“branch prediction”) è detto “esecuzione
speculativa”.
L’esecuzione speculativa richiede una struttura
circuitale molto più complessa per consentire l’esecuzione preventiva di istruzioni che potrebbero an-
PC Open 17 www.pcopen.it
In un processore
superscalare, le istruzioni
riconosciute come non
interdipendenti possono
venire eseguite in modo
simultaneo da un certo
numero di unità di
esecuzione autonome
In un microprocessore
superpipelined, le
istruzioni vengono
eseguite “per fasi” in
una sorta di “catena
di montaggio” in
grado di avanzare
ad elevata velocità.
Complessivamente
una singola istruzione
richiede sempre lo stesso
tempo per attraversare la
pipeline, ma in compenso
il throughput (numero di
istruzioni completate al
secondo) può crescere in
misura proporzionale al
numero degli stadi della
pipeline
IT administrator - Hardware
Il die di un processore
dual core contiene di
fatto due CPU complete
in ogni dettaglio; viene
messa a fattor comune
solo la circuiteria di
interconnessione al
bus e, negli ultimissimi
modelli Intel, anche la
cache complessiva.
Rispetto ai processori
tradizionali, e a parità
di frequenza di lavoro, i
processori dual core, se
adeguatamente sfruttati
dal sistema operativo,
possono assicurare un
aumento di prestazioni
prossimo al 100%.
In un processore RISC,
le istruzioni sono semplici
e piccole da codificare,
ma i programmi
ne contengono un
gran numero e per
compiere quasi tutte
le operazioni non
banali si deve scrivere
un sottoprogramma,
poichè il processore
non è in grado di
eseguirle direttamente
in forma nativa. In
compenso il processore
è costruttivamente
semplice ed è in grado
di integrare una maggior
quantità di cache e
funzionare ad alta
frequenza
In un processore CISC
i programmi sono
costituiti da un numero
relativamente basso
di istruzioni “ricche”,
ognuna delle quali
può produrre effetti
semanticamente molto
significativi. Naturalmente
l’esecuzione di un tale
genere di istruzioni
richiede al processore un
lavoro non indifferente
che rischierebbe di
causare, agli effetti
esterni, lunghi periodi
di attesa; pertanto,
l’aumento del clock
interno è particolarmente
benefico su dispositivi
CISC, specialmente se i
programmi da eseguire
non accedono troppo
spesso alla memoria
che non servire, nonchè
l’annullamento delle
conseguenze
di tale esecuzione appena sarà
chiarito quale sia il flusso
di istruzioni
corretto, fra
i molteplici
flussi di esecuzione “tentati” in parallelo fra loro.
Un approccio più radicale per l’aumento di prestazioni, di recente adozione anche sui processori di larga disponibilità come gli AMD X2 e gli Intel Core Duo,
Core 2 Duo, è l’architettura Dual Core.
Questa filosofia di progetto non cerca più di velocizzare al massimo il singolo processore aumentandone la frequenza, il numero di registri o la quantità
di cache, ma effettua un vero e proprio salto di qualità integrando due processori completi (core) in uno
stesso chip. Se il sistema operativo è in grado di riconoscere e gestire i due core, ripartendo fra di essi
il lavoro da svolgere, sarà possibile arrivare quasi a
un raddoppio di prestazioni a parità di frequenza di
clock. In alternativa si potranno usare i due core per
offrire le stesse prestazioni complessive di un processore tradizionale single core, ma con una frequenza di lavoro inferiore, con una significativa riduzione
dei consumi e della dissipazione termica.
Lezione 2
larghezze diverse a seconda dei punti: l’interfaccia
verso la memoria, per esempio, può essere larga anche 256 bit, per ottimizzare le prestazioni, mentre i
registri di calcolo usati dalle istruzioni multimediali SSE sono larghi 128 bit. In generale, più è lento un
canale, più si tende a progettarlo “largo” per mantenerne comunque elevata la portata.
Quando si parla di “processore a X bit” ci si riferisce principalmente alla dimensione dei registri interi
per uso generico logico-aritmetico. Più sono grandi
questi registri, più risulterà facile per il processore eseguire “in un sol colpo” (ossia, in pochi cicli di
clock) calcoli su numeri grandi o su stringhe di byte
di lunghezza notevole: tutto questo può tradursi in
un incremento di prestazioni, se tale genere di calcoli risulta prevalente nei programmi eseguiti sulla
macchina. Purtroppo non tutti i calcoli richiedono
di lavorare su numeri enormi, pertanto un aumento
della larghezza dei registri (per esempio, da 32 a 64
bit) non si traduce necessariamente in un aumento
delle prestazioni di misura proporzionale (nell’esempio, un raddoppio).
I benefici cominciano a sentirsi con applicazioni
progettate per avvantaggiarsi al massimo delle caratteristiche della macchina su cui girano: in altre
parole, devono essere versioni specifiche di software o del sistema operativo.
Un’altra rilevante distinzione fra i microprocessori dipende dalla filosofia con cui sono state definite
le istruzioni che è possibile eseguire. L’impostazione
più classica, ancor oggi dominante, è quella di istruzioni “ricche”, in grado di svolgere compiti notevol-
Il passaggio al multicore
Dopo anni di corsa all’aumento della frequenza
di clock, questa tendenza tecnologica appare attualmente la via più “facile” per conseguire un rapidissimo aumento di capacità di calcolo, un’ottimizzazione dei consumi elettrici a parità di prestazioni o un
compromesso fra entrambi, e la tendenza sarà sicuramente esasperata nei prossimi anni: è già stato presentato il primo processore desktop quad core, ossia dotato di ben 4 core in un unico case (l’Intel Core
2 Extreme QX6700), e non mancano occasioni in cui
AMD e Intel profetizzano un futuro non lontano con
decine e decine di core in un PC desktop.
È comunque importante avere chiaro che l’aumento di capacità di calcolo fisicamente installata non
necessariamente si traduce in un aumento di pari livello delle prestazioni percepite: in che misura questo sia possibile dipende dall’uso che si fa della macchina e da come sono scritti sistemi operativi e applicazioni. Con applicazioni non pensate per sfruttare
la capacità di elaborazione parallela del processore,
le CPU multicore, con il loro clock tipicamente inferiore a quello delle versioni single core, possono
addirittura offrire prestazioni peggiori (sulla singola
applicazione).
Il passaggio graduale ai 64 bit
Una soluzione ben nota per accrescere la potenza
di calcolo di un processore è l’accrescimento del formato dei dati trattabili in modo nativo dalla sua architettura interna: se i primi microprocessori erano a
4 e 8 bit, ben presto si passò a modelli a 16 bit, poi a
32 bit e (è il caso dei modelli più recenti) a 64 bit.
In realtà il percorso dei dati di un processore ha
PC Open 18 www.pcopen.it
mente complessi. Una singola istruzione di questo tipo può infatti impegnare il processore per un tempo
relativamente lungo, comandandogli di trasferire un
intero blocco di memoria o di effettuare un singolo
calcolo complesso (un’operazione su matrici, un calcolo trigonometrico,...). Questa filosofia è detta Complex Instruction Set Computing (CISC).
I microprocessori CISC e RISC
I microprocessori CISC privilegiano l’espressività e la potenza delle istruzioni e l’ampiezza di scelta
offerta, anche se questo comporta una complessità
circuitale maggiore, con una conseguente maggior
difficoltà per salire di frequenza e quindi, in ultima
analisi, il rischio di un limite alla possibilità di un
aumento di prestazioni. Attualmente costituiscono
esempi paradigmatici di CPU CISC i processori x86
e compatibili, ossia i membri delle famiglie Celeron,
Centrino, Pentium, Xeon, Core e Core2 per Intel, e i
rispettivi concorrenti Sempron, Turion, Athlon e Opteron di AMD.
Completamente opposta la filosofia dei processori RISC (Reduced Instruction Set Computing) nei quali
il set di istruzioni è stato razionalizzato e ridotto al
minimo indispensabile per poter comunque svolgere
qualsiasi compito, e ci si è focalizzati invece su una
ottimizzazione estrema del flusso di lavoro, facilitata dalla semplificazione circuitale. Lo spazio risparmiato nella CPU permette di compensare la relativa
“povertà” espressiva delle istruzioni integrando una
grande quantità di cache, o costruendo un’architettura decisamente superscalare, o ancora aumentando
il numero di registri, mentre la semplicità delle istru-
Lezione 2
zioni consente di eseguirle in breve tempo e quindi di
aumentare la frequenza di lavoro della CPU.
Al suo apparire, la tecnologia RISC colpì subito gli
addetti ai lavori per l’efficacia con cui sembrava consentire rapidi aumenti di frequenza e di prestazioni,
bassi costi di produzione e semplicità di programmazione. Tuttavia, col tempo, i produttori di processori
CISC trovarono il modo di applicare anche nei propri
progetti alcune delle più interessanti idee alla base
della tecnologia RISC, riuscendo a colmare il gap prestazionale con i concorrenti. Per esempio, il modo in
cui le moderne architetture Pentium e Athlon gestiscono internamente l’esecuzione delle istruzioni per
decomposizione le fa assomigliare a dei “gusci” CISC
costruiti come se fossero “interpreti” intorno a dei
nuclei di esecuzione di stampo RISC.
I più noti processori RISC sono gli ARM usati su
palmari e smartphone, gli SPARC, Alpha, PA-RISC e
MIPS utilizzati sulle workstation Unix di Sun, Digital,
Compaq, HP, nonchè i processori PowerPC utilizzati dagli Apple Mac fino alla recente svolta in favore
di Intel.
Merita un cenno anche un’ultima soluzione per la
scelta del set di istruzioni, detta Very Long Instruction
Word (VLIW). In questo sistema parzialmente a metà
strada tra RISC e CISC, le istruzioni sono in realtà degli aggregati di istruzioni paragonabili a quelle RISC:
chi emette il codice oggetto del programma istruisce
la CPU sulle opportunità di esecuzione parallela impacchettando insieme le istruzioni che è certamente
possibile eseguire in modo contemporaneo. Spesso
vengono anche inserite indicazioni sul percorso più
probabile che i cicli o le decisioni seguiranno durante l’esecuzione. Questo permette al processore di
non dover più supportare la complicata esecuzione
speculativa, di non doversi più preoccupare di studiare le istruzioni per cogliere eventuali possibilità di
parallelizzazione, e anche di risparmiare le pipeline
parallele per la riduzione della latenza in caso di deviazioni inattese dal flusso di controllo. Nonostante
l’idea non sia nuova (il concetto originale fu proposto negli anni ‘80), le implementazioni VLIW non sono state molte e non hanno incontrato grande successo di mercato. L’architettura IA64 dei processori
Intel Itanium, con la sua tecnologia EPIC (Explicitly
Parallel Instruction Computing), rappresenta la più recente interpretazione dei concetti VLIW.
La funzione del clock del processore
Anche se le varie parti della CPU hanno ruoli distinti e ben definiti e spesso anche una elevata autonomia d’azione, il loro funzionamento non avviene in
modo irregolare e sincronizzato solo all’occorrenza,
ma bensì in modo “corale” e sincrono, secondo un
rigoroso ritmo (clock) scandito con estrema precisione a partire da un segnale generato da un oscillatore esterno alla CPU e trasmesso a tutte le sue parti attraverso apposite linee di comunicazione la cui
forma e lunghezza sono calcolate in modo tale che
il ritardo di propagazione sia approssimativamente
uguale per tutte le unità destinatarie: a 3 GHz di frequenza il tempo di ciclo è di circa 0,3 nanosecondi,
un tempo nel quale la luce può percorrere (nel vuoto) 10 centimetri.
Nello stesso tempo un segnale elettrico su conduttori di rame percorre una distanza ancora minore. È quindi chiaro che alle frequenze oggi raggiunte
negli ultimi processori diventa significativo anche il
rischio che, per banali ragioni di distanza, il segnale
di clock raggiunga le varie zone della CPU in momenti
non perfettamente sincronizzati. Diventa quindi imperativo effettuare un accurato progetto delle linee
IT administrator - Hardware
di distribuzione del clock nella CPU.
Se tutte le attività elementari che avvengono all’interno della CPU sono suddivise in piccoli passi che
hanno luogo quando si registra un impulso del segnale di clock, è chiaro che la quantità di lavoro utile che
la CPU può effettuare dipende dal numero di impulsi
di clock ricevuti.
Ne segue che in condizioni ideali la velocità di una
determinata CPU, definita come numero di istruzioni
effettuate in un secondo (Million Instructions Per Second: MIPS), dipende direttamente dal numero di impulsi di clock che la CPU è in grado di ricevere e gestire ogni secondo. Questa quantità è detta frequenza di clock: quanto più essa è alta, tanto maggiore
sarà il numero di istruzioni eseguite ogni secondo, e
tanto più la CPU sarà veloce. È quindi chiaro come
mai i produttori di CPU siano impegnati da anni in
una incessante corsa all’aumento di frequenza.
I primi microprocessori, intorno alla metà degli
anni 70, lavoravano a frequenze dell’ordine di 1 MHz
(e richiedevano molti cicli di clock per eseguire ogni
istruzione). Intorno all’anno 2000 si è oltrepassata
la soglia del GHz e oggi, come sappiamo, alcuni dei
processori più veloci lavorano a frequenze comprese fra 3 e 4 GHz (e se hanno un’architettura superscalare, un’architettura multi core, o entrambe, possono eseguire anche più di una istruzione per ogni
ciclo di clock).
Un aspetto particolarmente importante in fatto
di clock è il fatto che le frequenze citate sono ormai
talmente elevate che per i motivi descritti sarebbero molto difficili da gestire su aree estese come una
motherboard.
Inoltre, a frequenze così elevate, ogni linea di comunicazione tende a comportarsi come un’antenna,
in grado sia di irraggiare (perdendo potenza) sia di
ricevere interferenze radio (con il rischio di una alterazione dei segnali in transito e quindi dei dati da
essi trasportati). Lavorare a frequenze di clock così
elevate, inoltre, non sarebbe neppure utile, dato che
la maggior parte delle periferiche, compresa la stessa memoria RAM, opera a velocità decisamente inferiori (fanno eccezione le schede grafiche, per le quali
l’architettura di sistema prevede soluzioni ad hoc).
Le frequenze di funzionamento
Per motivi di opportunità tecnologica, di facilità
costruttiva e di stabilità di funzionamento, le motherboard e i bus lavorano a frequenze molto più basse della CPU. Queste frequenze sono rimaste molto simili, e in molti casi uguali, a quelle alle quali le
motherboard lavoravano anche 10-15 anni fa.
La soluzione al problema di questa differenza di
velocità raggiungibili nei due “mondi” consiste nel
far lavorare internamente la CPU a velocità maggiore di quella con cui essa viene fatta comunicare con
l’esterno.
Il primo processore a introdurre la novità di una
PC Open 19 www.pcopen.it
Tutti i processori
moderni utilizzano
una tecnica di clock
multiplying per lavorare
internamente a una
velocità maggiore di
quella scandita dal
clock di sistema, assai
più lento. Un apposito
circuito programmabile
provvede a generare
un segnale di clock a
frequenza N volte più alta
di quello in ingresso. La
CPU può così lavorare
alla massima velocità
possibile e deve
sottoporsi ad attese
solo quando occorre
comunicare con l’esterno
IT administrator - Hardware
L’utility CPU-Z permette
di avere sotto controllo
i parametri principali del
processore
frequenza di lavoro interna diversa da quella del bus
di sistema è stato l’Intel 486 DX2, introdotto sul mercato nel 1992. Questo processore si attestava su un
bus di sistema a 25 o 33 MHz, ma internamente disponeva di un raddoppiatore di clock che faceva sì che
la frequenza di lavoro interna fosse rispettivamente
di 50 MHz e 66 MHz.
All’epoca il fattore determinante nelle prestazioni era la velocità di calcolo del processore più che
la larghezza di banda verso la memoria, pertanto
l’operazione ebbe pieno successo, tanto che il 486
DX2 a clock raddoppiato vantava prestazioni quasi
esattamente doppie di quelle del 486 originale. La dimostrata efficacia dell’applicazione della tecnologia
“clock multiplier” la rese una soluzione adottata da
tutti i processori successivamente lanciati sul mercato: il processore poteva inseguire liberamente prestazioni sempre più alte semplicemente aumentando
il fattore di moltiplicazione interna, lasciando che la
tecnologia del resto dell’architettura di sistema crescesse in frequenza con tempistiche industriali più
“tranquille”.
Così iniziarono a comparire processori con fattore
di moltiplicazione 3 (primo esempio il 486 DX4 a 100
MHz su bus a 33 MHz), 4 (Pentium MMX a 266 MHz
su bus a 66 MHz), 5 (Pentium II a 333 MHz su bus a
66 MHz) e così via. Non mancavano i moltiplicatori
frazionari: per esempio 2.5 (486 DX4 a 100 MHz su
bus a 40 MHz oppure Pentium 166 MHz su bus a 66
MHz), 3.5 (Pentium MMX a 233 MHz su bus a 66MHz).
È proprio dalla combinazione fra moltiplicatori frazionari e valori non “tondi” del clock di sistema che
sono scaturite alcune bizzarre frequenze di lavoro,
come quella del Pentium III Mobile a 1,13 GHz, ottenuta moltiplicando 8.5 volte un clock di sistema di
133 MHz.
Col tempo, però, i valori dei moltiplicatori sono
saliti a tal punto che i valori frazionari hanno perso
rilevanza. I valori più elevati sono quelli impiegati da
quei processori di classe economica che lavorano
internamente a frequenza elevata pur attestandosi
su un bus di sistema a velocità relativamente bassa: per esempio, un Celeron a 2.6 GHz che lavora su
bus a 100 MHz impiegherà internamente un moltiplicatore pari a ben 26. È intuitivo che a questi livelli
vi sia di fatto una sproporzione: certo è possibile e
tecnicamente corretto dichiarare su brochure e volantini che il PC è dotato di un processore a 2.6 GHz,
e la semplificazione del sistema RAM conseguente
alle condizioni di funzionamento a bassa frequenza
permette di abbassare i costi, altro vantaggio non
trascurabile.
Non si può non rilevare, però, come in questi PC
venga a mancare il necessario equilibrio fra la velocità del processore e quella del resto del sistema, a
partire dalla memoria. Il processore potrà anche essere internamente molto veloce, ma in un sistema di
questo genere, a causa della lentezza del sottosistema di memoria, esso rischierà di trascorrere molto
tempo in attesa di dati e istruzioni, o in attesa di poter emettere risultati sul bus. In simili condizioni sarebbe di capitale importanza che la cache integrata
nel processore fosse abbondante per compensare
la lentezza del bus di sistema: purtroppo però tale
esigenza è proprio in antitesi con quanto tipicamente accade sui processori di classe economica in cui
lo squilibrio clock-bus è più acuto e dove di solito,
per ragioni di costo, è scarsa anche la quantità di
cache.
Considerato quanto il clock della CPU incida in
ultima analisi sulle prestazioni generali del sistema,
non stupirà sapere che un classico espediente usa-
PC Open 20 www.pcopen.it
Lezione 2
to dagli appassionati per “truccare” il proprio PC e
spremerne le massime prestazioni possibili è quello di aumentare il clock di sistema, oppure il fattore
del clock multiplier della CPU, o entrambe le cose
insieme. Questa operazione è detta overclocking e
sebbene in casi fortunati possa anche fornire benefici prestazionali di entità eclatante, dovrebbe essere
considerata alla stessa stregua di una elaborazione
a un motore d’automobile: un’operazione esaltante
per gli appassionati, ma potenzialmente in grado di
danneggiare il motore, e che, se non accompagnata
da corrispondenti adeguamenti anche sul resto del
sistema, crea una situazione generale di squilibrio
prestazionale che può anche vanificare parte dei benefici dell’intervento.
Aumentare il clock di sistema significa di fatto costringere il bus, la memoria, il chipset e la CPU a funzionare a frequenze più alte di quelle per le quali sono stati progettati. Nel caso della CPU questo effetto
può essere compensato riducendo in pari misura il
clock multiplier interno, ma le altre componenti di
solito non sono facilmente svincolabili dall’aumento di frequenza generale imposto a tutto il sistema e
vengono quindi trascinate in questa corsa generale
verso valori di clock maggiori di quelli ufficialmente
sopportabili.
Generalmente i chip che il produttore garantisce
per il funzionamento a una certa frequenza sono in
grado di funzionare anche a una frequenza leggermente più elevata di quella nominale, ma non a una
frequenza “molto” maggiore, altrimenti sarebbero
stati certificati per la frequenza superiore, dichiarati compatibili con essa e, ovviamente, venduti con
maggior margine di profitto. Su ogni wafer sfornato
dalla fabbrica esiste un gran numero di chip. Questi
vengono tagliati e provati uno ad uno a varie frequenze operative: alcuni risulteranno semplicemente guasti, qualunque sia la frequenza di lavoro, e di conseguenza scartati. Altri riusciranno a funzionare fino a
una certa frequenza X, ma a causa della “debolezza”
di alcuni transistor realizzati in modo imperfetto, cominceranno a fallire i test se fatti funzionare a frequenze maggiori. Il produttore allora li commercializzerà dichiarando che sono adatti al funzionamento
alla frequenza X, oppure, per garantirsi un margine
Lezione 2
di sicurezza, a una frequenza leggermente minore di
X. Qualora poi le strategie di marketing richiedano di
invadere il mercato con una grande quantità di prodotti “a basse prestazioni” e a basso costo, ma il processo produttivo in realtà funzioni “troppo” bene e
sforni un numero insufficiente di chip relativamente
“imperfetti”, vi potrà essere una deliberata distorsione di questo margine di sicurezza.
Supponiamo per esempio che sul wafer, escludendo i chip totalmente guasti o troppo lenti, siano tipicamente presenti un 40% di chip in grado di funzionare correttamente a 2.8 GHz ma non a 3 GHz, un
ulteriore 25% in grado di spingersi fino 3 GHz e infine un 5% di chip verificati anche a 3.2 GHz. Per considerazioni commerciali, ad esempio per l’esigenza
di rifornire con adeguati volumi di chip “economici”
i produttori di PC in preparazione a una importante
stagione di vendite, il fabbricante potrebbe optare
per dichiarare come certificati a “soli” 2.8 GHz anche
una parte dei chip che in realtà hanno dimostrato di
poter funzionare anche a 3 GHz, oppure etichettare
come chip a 2.4 o 2.6 GHz molti chip in grado di funzionare anche a 2.8 GHz. In questo caso entreranno
in circolazione delle CPU perfettamente in grado di
assorbire un aumento del clock effettuato dal proprietario del PC agendo sulle impostazioni del BIOS
e gli appassionati dell’“overclocking” potranno sbizzarrirsi aumentando in modo del tutto sopportabile
le prestazioni e senza fare danni. Purtroppo non vi è
modo di sapere quale sia la frequenza massima raggiunta in fabbrica dal chip nel corso dei test di qualificazione, pertanto il tentativo di overclocking si fa
sempre “al buio” ed è un azzardo.
Il limite dei transistor
Spingere il processore a frequenze superiori a
quelle sopportabili fa sì che i transistor meno perfetti raggiungano il loro limite prima degli altri: alcuni bit nei calcoli, alcuni bit degli indirizzi, alcuni bit identificativi delle istruzioni potranno quindi
cambiare valore fra 0 e 1 in un tempo maggiore di
quello dei loro “colleghi” e, di conseguenza, perdere
la sincronizzazione con essi. Valori, indirizzi e istruzioni ne risulteranno alterati e così il PC comincerà
a produrre risultati sbagliati, a modificare locazioni
di memoria diverse da quelle che dovrebbe modificare, a eseguire istruzioni diverse da quelle scritte
nel programma originale. Tutti e tre questi fenomeni
possono produrre effetti disastrosi sulla stabilità del
sistema e sull’integrità dei dati. Inoltre, continuando
a salire con la frequenza o insistendo per lungo tempo su valori superiori a quelli sopportabili, qualche
transistor più “precario” degli altri potrebbe cedere
per l’eccessiva sollecitazione termica, danneggiandosi irreparabilmente.
A questo punto il circuito (CPU, RAM, north bridge o qualunque altro chip nel PC) si guasterebbe a livello fisico. Per evitare almeno questo effetto, fermo
restando però il problema dell’alterazione dei dati,
gli overclockers ricorrono generalmente a soluzioni
di raffreddamento estremamente spinte, tali da scongiurare il pericolo di “morte termica” di qualche transistor. Resta il fatto che il guadagno di prestazioni in
un contesto di non-garanzia della correttezza dei dati e della stabilità del sistema può essere accettabile
come sfida da appassionati su una macchina per videogiochi, ma non certo su una macchina utilizzata
per impieghi professionali oppure su un server. Le
alterazioni ai dati avvenute per aver fatto lavorare la
macchina in condizioni fuori norma, infatti, potrebbero venire salvate su disco dalle applicazioni ignare
del problema e rimanere latenti per lunghi periodi: la
IT administrator - Hardware
corruzione dei dati archiviati potrebbe manifestarsi
a grande distanza di tempo ed apparire “inspiegabile”, causando anche gravi danni economici (valori
macroscopicamente sbagliati in un database bancario, codici crittografici irreparabilmente compromessi, e così via).
Inutile segnalare, poi, il fatto che i produttori, evidentemente, non gradiscono per niente che parte
delle vendite dei prodotti certificati ad alto clock (e
prezzo proporzionato) vada persa a causa della diffusione dell’overclocking: se risulta facile acquistare
un processore più lento del 20-30%, risparmiando il
30-40%, e poi aumentarne il clock in modo da ottenere le prestazioni del modello “top”, questo si tradurrà in un evidente danno economico per il fabbricante. Pertanto è spesso previsto un sistema che impedisce di variare il fattore di moltiplicazione, oppure
che consente di abbassarlo, ma non di aumentarlo al
di sopra di un certo valore limite. In questo caso gli
overclockers possono agire sul bus di sistema, ma
non sul moltiplicatore.
Tuttavia, come già accennato, aumentare il clock
di sistema significa sottoporre non solo la CPU, ma
anche altri componenti fra cui la RAM, il chipset, la
scheda grafica e le altre schede di espansione inserite sul bus, a uno stress dovuto al funzionamento in
condizioni al di sopra dei limiti nominali. Poichè è
sufficiente che uno solo dei componenti descritti entri in crisi perchè si possano produrre effetti negativi per la stabilità del sistema o per l’integrità dei dati
in esso contenuti, si moltiplicano le probabilità che
qualcosa “vada storto”.
Abbiamo visto la fondamentale importanza che
riveste la frequenza di clock nella determinazione
delle prestazioni ottenibili. Essa però non è l’unico
fattore che può determinare la velocità della CPU.
Un progetto superscalare, per esempio, consente di
eseguire più istruzioni per ogni ciclo di clock, con il
risultato che una CPU ad elevato parallelismo, pur
operando a un clock relativamente basso, può fornire prestazioni equivalenti a quelle di una CPU che
punta tutto sulla frequenza di lavoro elevata. Infine,
solo per citare un altro fattore di importanza cruciale
nella determinazione delle prestazioni teoricamente
possibili con una CPU, va considerato che anche una
CPU superscalare operante ad altissima frequenza di
clock è del tutto “sprecata” se dati e istruzioni non
arrivano dalla memoria a una velocità adeguata alla
sua capacità di elaborarli. Un cattivo abbinamento
CPU-memoria deprime le prestazioni proprio come
un potente motore sportivo risente di un sistema di
aspirazione non abbastanza “libero”.
Ecco perché un problema critico è la velocità del
canale di comunicazione che collega CPU e memoria
RAM: questa velocità è detta “larghezza di banda” e
ai livelli attuali si misura in GByte/secondo. I proget-
PC Open 21 www.pcopen.it
I moduli RAM possono
essere fatti lavorare
in parallelo per creare
l’illusione di un modello
di memoria con parole
larghe il doppio (ad
es. 128 bit anzichè 64
bit) oppure per gestire
schemi circuitali di
“interleaving” finalizzati
a velocizzare l’accesso
alla RAM
IT administrator - Hardware
Intel e AMD sono i
principali produttori di
microprocessori per PC
Una motherboard VIA
in formato MiniITX,
per applicazioni
embedded o automotive.
L’espandibilità è limitata
ma sono presenti tutte
le interfacce standard;
il sistema è in grado di
far girare normalmente
Windows
tisti di CPU, motherboard e moduli di memoria hanno varie armi a disposizione per tentare di assicurare un adeguato interscambio di dati fra CPU e RAM.
La prima è quella di cercare di costruire della memoria RAM in grado di lavorare a una frequenza molto
elevata: idealmente, tale frequenza dovrebbe essere
uguale a quella della CPU. Purtroppo, costruire moduli di memoria di elevata capacità e al tempo stesso
di elevatissima frequenza di lavoro avrebbe un costo
esorbitante con le tecnologie attuali. Pertanto, per
“nascondere” alla CPU il fatto che la RAM in realtà è
diversi ordini di grandezza più lenta di quanto idealmente occorrerebbe, si ricorre a schemi progettuali sofisticati che seguono, e spesso combinano, due
distinti approcci.
Il primo nasce dalla constatazione che statisticamente gli accessi alla memoria che la CPU effettua in
sequenza riguardano celle di memoria consecutive.
Per esempio, verranno tipicamente richieste alternativamente locazioni di indirizzo pari e di indirizzo dispari. Se dunque la RAM venisse organizzata in modo
tale che in un modulo venissero memorizzate le celle
pari e in un altro modulo quelle dispari, di fronte a un
flusso di richieste della CPU rivolto a una serie di indirizzi sequenziali, con una accurata temporizzazione sarebbe possibile far lavorare in modo alternato
i due moduli RAM per fornire alla CPU i dati richiesti
con una velocità apparente doppia rispetto a quella
di un singolo modulo.
Estremizzando questo approccio si possono creare banchi di memoria in cui, nell’ipotesi che gli indirizzi vengano richiesti in un ordine relativamente regolare, il sistema nel complesso si presenta alla CPU
come un singolo modulo a “velocità efficace” molto
maggiore di quella reale delle sue singole parti. Per
assecondare questo tipo di ipotesi, la CPU fa in modo di prelevare dalla memoria non singole celle, ma
gruppi di 4, 8, 16 o 32 celle alla volta. Tutto il sottosistema RAM è pensato per rispondere in modo ottimizzato a questo “pattern” di richieste.
Qualche volta il parallelismo appena descritto è
implementato all’interno dei moduli di memoria; altre volte l’architettura di sistema richiede in più che
i moduli RAM vengano montati a coppie, o per applicare anche a livello macroscopico la tecnica descritta, o per raddoppiare la “larghezza di parola” creando l’illusione di avere una RAM che lavora a 128 bit
anzichè a 64 bit. In entrambi i casi l’effetto macroscopico è un raddoppio della larghezza di banda che il
sistema RAM presenta alla CPU.
Memorie che seguono l’evoluzione
Anche la metamorfosi che i moduli di memoria
hanno subito negli anni è stata tesa ad aumentarne
frequenza di lavoro e larghezza di parola, che insieme concorrono ad aumentare la larghezza di banda.
La frequenza è stata aumentata prima linearmente,
nel corso degli anni, e poi, con l’introduzione delle
RAM Double Data Rate (DDR), con un improvviso
raddoppio. Dal punto di vista dell’organizzazione logica e fisica, invece, se 20 anni fa le RAM erano spesso installate sotto forma di singoli chip zoccolati, si è
poi passati a schemi circuitali in cui le RAM venivano
montate su moduli a circuito stampato (Single Inline
Memory Module, o SIMM, e poi Dual Inline Memory
Module, o DIMM).
I primi moduli SIMM avevano un’interconnessione
con la motherboard a 30 pin, ma ben presto si passò
ai SIMM da 72 pin, che spesso era necessario montare a coppie. Ogni SIMM aveva un percorso dati largo 32 bit e per l’uso con sistemi di classe Pentium,
dotati di bus dati a 64 bit, era appunto necessario
PC Open 22 www.pcopen.it
Lezione 2
montare i moduli a coppie per presentare alla CPU
un data path largo il doppio. I moduli DIMM avevano invece fin dall’origine un data path a 64 bit e una
piedinatura a 72 pin, poi passata a 144, 168, 184 e
perfino 240 pin.
Il secondo espediente progettuale per velocizzare
il funzionamento dell’accoppiata CPU-RAM consiste,
come già accennato, nell’interposizione di uno o più
livelli di memoria cache fra la CPU e la memoria. Ai
livelli attuali le CPU desktop più diffuse integrano direttamente sia la cache L1 (tipicamente 32 Kbytes)
sia la L2 (da 256 Kbytes a 4 MBytes a seconda della
classe di costo e prestazioni del processore), mentre,
almeno su personal computer, non è mai usata una
cache di terzo livello, presente invece su certi sistemi server in cui la quantità di RAM da accelerare mediante cache è talmente elevata che il quantitativo di
cache L2 integrata nel processore non sarebbe sufficiente a dare una copertura statistica adeguata.
Il mercato dei processori
I processori per PC attualmente disponibili sul
mercato sono prodotti principalmente da due fornitori: Intel e AMD. Il colosso Intel ha una storia di
quasi 40 anni essendo stata fondata nel 1968; è il più
grande produttore di chip al mondo, con quasi 40 miliardi di dollari di fatturato nel 2005 e quasi 100.000
dipendenti e la sua storia praticamente coincide con
quella dei microprocessori, anche se la sua attività
si estende a importanti settori collaterali come quello delle memorie RAM, dei chipset, dei chip grafici e così via. L’architettura x86 a cui appartengono
i Pentium, i Celeron, i Centrino, gli Xeon e i recenti
Core/Core2 è oggi l’architettura più diffusa nel settore dei PC desktop e portatili e nei server fino alla
fascia media.
A inizio 2006 Intel ha annunciato la sua nuova architettura Core, con cui appare evidente un ripensamento della strategia di ricerca prioritaria dell’aumento di clock, a favore di una grande attenzione al
rapporto tra potenza di calcolo effettiva e consumo
elettrico/dissipazione termica; nell’occasione fu annunciata anche una radicale svolta a favore di una
generalizzata adozione di architetture multicore, che
a medio termine dovrebbero arrivare a permeare tutti i prodotti compresi probabilmente quelli di fascia
economica. La linea Core2 costituisce un importante
passo nella direzione segnata da Core, con una “vera” revisione della microarchitettura e l’arrivo del
primo esempio di processore quad core.
Lezione 2
Anche il minaccioso concorrente di Intel sull’architettura x86, AMD, ha una lunga storia, essendo
stata fondata nel 1969. Per un certo periodo AMD
produsse processori compatibili con 386 e 486, con
i quali competeva soprattutto sul prezzo date le prestazioni sostanzialmente equivalenti a quelli del prodotto concorrente. La svolta si ebbe quando, a metà
anni Novanta, AMD introdusse una propria linea di
CPU, la K6 e successive varianti, dal progetto completamente nuovo, seppure compatibili con l’assembler x86, caratterizzata soprattutto da un convincente rapporto prezzo/prestazioni.
Nel 1999 compare la linea Athlon, con prodotti
sempre più competitivi anche sul terreno delle prestazioni assolute; il dinamismo progettuale di AMD
continuò con l’introduzione, nel 2003 e in anticipo su
Intel, delle estensioni a 64 bit per architettura x86 ed
il loro lancio nelle linee Athlon64 e Opteron. Fatto assai rilevante, le estensioni 64 bit di AMD hanno inoltre trovato posto, in seguito, anche sul Turion64 per
portatili e sul Sempron64 per i desktop di fascia economica: anche in questo caso in anticipo su Intel.
Di estrema importanza anche l’introduzione dell’architettura dual core, prima (nel 2005) su Opteron
e Athlon64 X2, poi anche sul recentissimo Turion64
X2 per portatili (2006). AMD non è ancora in grado
di offrire un processore quad core paragonabile al
QX6700 di Intel, ma, grazie all’architettura Direct Connect e al bus HyperTransport, nate essenzialmente per
i server Opteron multiprocessore ma presenti anche
sulla linea Athlon, punta su un’architettura Quad FX
(o “4x4”) in cui una motherboard per sistemi desktop può ospitare due processori dual core (sul nuovo
Socket F a 1207 pin) che dialogano fra loro ad altissima velocità. Il numero dei core installati è sempre
pari a 4, con la possibilità di offrire prestazioni simili
a quelle del prodotto concorrente e soprattutto con
la possibilità di effettuare un upgrade a 8 core, quando saranno disponibili chip quad core di AMD, semplicemente cambiando le due CPU.
Un produttore alternativo di CPU x86 compatibili è
Transmeta, che propone le linee Crusoe ed Efficeon
rivolte soprattutto al mercato dei subnotebook (in
cui una priorità è il bassissimo consumo elettrico).
Queste si basano su un core VLIW “nascosto” da
uno strato di adattamento che interpreta il codice
oggetto x86 e lo traduce al volo in gruppi di istruzioni VLIW. Questa architettura emula con “routines”
VLIW molte delle operazioni CISC dell’assembler x86,
conseguentemente l’hardware risulta semplice (il die
di Efficeon è grande circa la metà di quello di processori x86 contemporanei) e caratterizzato da bassi
consumi elettrici. In teoria, questo schema permette fra l’altro di emulare qualsiasi altro codice macchina semplicemente adattando l’interprete VLIW,
che non è altro che un particolare programma fisso in esecuzione sul processore. Inoltre, per mantenere la compatibilità con eventuali nuove istruzioni
aggiunte via via all’architettura x86 da Intel e AMD,
Transmeta non deve fare altro che aggiornare l’interprete, un’operazione senz’altro più rapida di una revisione circuitale. Le energie dei progettisti possono
così rimanere in gran parte focalizzate sul continuo
miglioramento dell’efficienza energetica e delle prestazioni del core VLIW.
Una particolare nicchia di mercato nel mondo delle CPU per sistemi PC è occupato da VIA Technologies, che produce processori x86 compatibili (la serie Via C3) e lillipuziane motherboard nello speciale formato Mini ITX, per la realizzazione di sistemi
di minime dimensioni e basso consumo adatti, per
esempio, all’integrazione in ambiente automotive
IT administrator - Hardware
(per queste applicazioni sono stati coniati termini
come “car PC” e “carputer”).
Altri produttori di CPU diffuse solo al di fuori del
mondo dei PC sono IBM, per quanto riguarda i PowerPC usati sugli Apple Mac fino a epoca recente, e Sun
con i suoi SPARC usati sulle workstation Solaris.
Entrambe queste linee di prodotto sono basate su
un’architettura RISC.
Per lungo tempo i Mac basati su PowerPC hanno esibito ottime prestazioni, specialmente se confrontati con la precedente famiglia di CPU impiegate (Motorola 68xxx), in virtù delle indubbie qualità
del processore IBM ma anche del sistema operativo
snello ed efficiente, di matrice Unix. Tuttavia le prestazioni dei processori x86 hanno continuato ad aumentare a un ritmo maggiore di quello dei PowerPC,
sia per l’enorme mercato PC x86 che rendeva possibile giustificare investimenti molto maggiori in ricerca, sia per lo stimolo competitivo dato dalla lotta
fra Intel e AMD sempre più stringente negli ultimi 2-3
anni a causa dei significativi successi messi a segno
da AMD. In epoca recente, poi, si dice che fosse anche emersa la difficoltà dell’architettura PowerPC
nel tenere il passo con
i processori Intel Pentium Mobile e Centrino
e AMD Turion nel campo della riduzione dei
consumi elettrici, a parità di prestazioni, per
applicazioni mobili.
Questo rappresenta un handicap piuttosto serio per
la realizzazione di Mac portatili, un mercato non trascurabile in cui non era pensabile sfigurare.
Così Apple ha deciso di passare sull’architettura
Intel: i primi prodotti basati su processori Core Solo
e Core Duo hanno dimostrato fin dall’esordio prestazioni sensibilmente superiori a quelle dei precedenti
modelli basati su PowerPC, confermando la validità
dell’architettura x86 anche in ambito mobile.
Le CPU SPARC (Scalable Processor ARChitecture),
dal canto loro, adottano una architettura RISC inventata da Sun a fine anni Ottanta per la realizzazione di una famiglia di processori ad alte prestazioni
per le proprie workstation Unix. Nel 1989 fu fondata
l’organizzazione SPARC International con il compito
di promuovere la tecnologia e di concederne l’uso
su licenza anche ad altri produttori. Questo ha fatto
dell’architettura SPARC una tecnologia “aperta”, non
proprietaria, con la possibilità teorica di acquistare
prodotti compatibili anche da altri fornitori.
Sun ha continuato comunque ad essere l’attore
più dinamico nella continua evoluzione tecnologica
della piattaforma SPARC, che appare tuttora vitale e
aggiornata, anche se di applicazione sostanzialmente relegata a un mercato ben circoscritto. In particolare, nel 2005 è stata annunciata la più recente implementazione della serie: il chip
UltraSparc T1
(Niagara), con
ben 8 core incorporati, ognuno dei quali potente come un
singolo chip UltraSparc III e in
grado di gestire
4 threads.
Per semplificare e rimpicciolire i core
PC Open 23 www.pcopen.it
Apple è passata da
poco a processori
Intel, dopo aver per
anni utilizzato soluzioni
PowerPC di IBM
Sun è uno dei nomi
principali dell’evoluzione
tecnologica delle CPU
SPARC
IT administrator - Hardware
Lezione 2
L’installazione della CPU sulla scheda madre
L’installazione delle CPU nella loro
sede era un tempo un’operazione
piuttosto dedicata a causa della
notevole resistenza opposta dallo
zoccolo alle manovre di estrazione
e inserzione, che costringeva a far
uso di speciali pinze per integrati
oppure, in loro mancanza, a fare
cautamente leva fra socket e chip,
alternativamente su più lati, con un
oggetto sottile come un cacciavite,
sempre però con il rischio di piegare
un pin o di ledere qualche pista sulla
motherboard.
A parte una fugace parentesi in
cui alcuni processori (i Pentium
II, i primi Pentium III e alcuni
Celeron) erano realizzati come
“cartucce” da installare in un
lungo slot con sistemi di ritegno
scomodi e macchinosi, da anni
sono fortunatamente diventati
standard per le CPU i cosiddetti
socket di tipo ZIF (Zero-insertion
force) nei quali una comoda
levetta di sblocco “dilata” le sedi
di ciascun pin abbastanza da
consentire di inserire il processore
semplicemente appoggiandolo,
senza dover premere. Poiché i
socket sono spesso quadrati, per
evitare che la CPU venga inserita
con l’orientamento sbagliato,
ruotata di 90° o di 180°, il socket
prevede dei chiari riferimenti come
un angolo smussato o dei pin
mancanti in posizioni asimmetriche;
basterà confrontare i pin presenti
sulla CPU con le sedi previste dal
socket per sovrapporre esattamente
l’una all’altro. Se l’orientamento
è corretto la CPU “cadrà” in sede
senza pressione. Se si rileva la
benchè minima resistenza, o se
la CPU si appoggia in posizione
inclinata anziché restare
perfettamente orizzontale, è segno
1.4.2.3
Linee di prodotto
delle CPU x86
che non è disposta in modo corretto
(oppure che si è dimenticato di
azionare la levetta di sblocco per
“aprire” il socket).
Una volta trovato l’orientamento
giusto e verificato che la CPU è
scesa completamente sul socket
non rimarrà che bloccarla in sede
riponendo la levetta di sblocco in
posizione orizzontale.
L’operazione non può dirsi del tutto
conclusa poiché praticamente tutte
le CPU recenti hanno bisogno di
un dissipatore, quasi sempre di
tipo attivo ossia costituito da un
corpo alettato provvisto di ventola.
Questo dispositivo deve essere
installato sopra la CPU, a contatto
con essa, e per migliorare la
trasmissione del calore è prescritto
praticamente sempre di applicare
una pasta termoconduttiva sulla
faccia superiore della CPU prima di
far aderire il dissipatore. In alcuni
casi la pasta è fornita in dotazione
con il dissipatore (oppure gli è
stata addirittura già applicata, e in
questo caso può avere l’aspetto di
un piccolo pezzo di nastro biadesivo
da scoprire prima del contatto),
comunque nei negozi specializzati
ne può essere facilmente reperito
un tubetto per pochi euro. In caso
venga applicato un dissipatore
su una CPU che presenta tracce
di pasta termoconduttiva da
un’installazione precedente, è
fortemente consigliato asportare
completamente il vecchio materiale
e applicarne un nuovo strato.
Per quanto riguarda il fissaggio
meccanico del dissipatore, la
motherboard è provvista degli
ancoraggi necessari, che sono
standard per quanto riguarda
l’aggancio al dissipatore ma
possono presentare leggere
onde consentire l’integrazione di ben 8 di essi su
singolo chip, questi sono stati dotati di una quantità
di cache abbastanza modesta e, soprattutto, privati
della complessa circuiteria necessaria per l’esecuzione speculativa. Questo ha per contropartita un
peggioramento delle prestazioni del singolo thread
in caso di deviazione dal flusso di controllo principale, compensato però dal fatto che quando un thread
deve bloccarsi a causa di questa situazione, il core
manda semplicemente in esecuzione un altro dei 4
thread che sta gestendo, e intanto si prende tutto il
tempo necessario per il prefetch delle istruzioni necessarie per riprendere l’esecuzione del thread sospeso. Il throughput complessivo del processore così si avvicina al massimo teorico.
Ricordiamo infine che la quasi totalità dei palmari Windows Mobile e degli smartphone, nonchè alcune console portatili per videogiochi, si basano su
processori basati sull’architettura ARM, prodotta su
PC Open 24 www.pcopen.it
differenze nel sistema di
azionamento e sblocco: il manuale
della motherboard riporta i passi
necessari per non sbagliare.
Merita un cenno il socket LGA
775, attualmente usato da tutte
le più recenti CPU Intel, nel quale
la situazione è in un certo senso
“invertita” in quanto il socket
presenta dei pin e il processore
le relative sedi. Anche in questo
caso sono presenti dei riscontri
che evitano l’inserimento della CPU
in orientamento sbagliato, mentre
il fissaggio in sede è affidato a
una placca metallica quadrata che
blocca al suo posto la CPU e viene
bloccata a sua volta da una levetta
da fermare sotto a un apposito
gancio. Il dissipatore è una struttura
che si fissa alla motherboard con
quattro clip che si impegnano
in quattro fori disposti ai vertici
del socket; l’ancoraggio è quindi
completato dall’azionamento degli
appositi fermi meccanici.
Assolutamente da non dimenticare,
infine, il collegamento elettrico
della ventola all’apposita presa
sulla motherboard (generalmente
etichettata “CPU Fan”). Sarà il BIOS
a decidere se azionare la ventola
(eventualmente anche durante lo
standby) e a quale velocità, in base
ai sensori termici propri e a quelli
della CPU stessa.
Quanto detto a proposito dei
dissipatori per la CPU vale anche,
in molte motherboard recenti, per
il chipset, che può a sua volta
raggiungere notevoli temperature
d’esercizio e richiede quindi di
essere raffreddato a dovere. Il
sistema di dissipazione è però
generalmente installato in fabbrica
e a meno di esigenze particolari non
richiede upgrade né sostituzioni.
licenza da società come Intel, ST Microelectronics,
IBM, Texas Instruments, Philips e Samsung. Si stima
che ben il 75% di tutti i processori a 32 bit impiegati in applicazioni embedded nel mondo sia costituito da chip in architettura ARM. La tecnologia ARM
nacque a metà degli anni Ottanta da una iniziativa di
progetto di Acorn Computers, un produttore inglese di home computer; le prime applicazioni furono
proprio sugli home computer Acorn, ma anche sul
primo vero “palmare” (l’Apple Newton) e su alcuni
videogiochi, come il Sega Dreamcast. Quando l’importanza industriale del progetto ARM apparve in
tutta la sua evidenza, si scelse di fondare una società spin-off, ARM Ltd., per seguirne lo sviluppo come
propria unica missione.
Linee di prodotto delle CPU x86
Come già ricordato, la stragrande maggioranza dei
processori di classe x86 destinati all’uso su sistemi
Lezione 2
IT administrator - Hardware
PC è prodotta da Intel e AMD. Entrambi questi produttori hanno organizzato le proprie linee di prodotto per rispondere alle esigenze dei vari segmenti di
mercato:
• una fascia di clienti desktop molto attenta ai costi
è disposta ad accettare prestazioni di buon livello,
anche se non al top, in cambio di una sostanziosa
riduzione del prezzo del sistema.
Sono rivolti a questo mercato i processori Intel
Celeron e AMD Sempron, spesso operanti a frequenze elevate ma purtroppo dotati di una quantità di cache non certo esorbitante (mediamente
256 Kbytes), spesso proposti dagli assemblatori in
configurazioni economiche dotate di schede grafiche a memoria condivisa e integrate su motherboard.
Interessante, in questa fascia di mercato, la proposta di AMD che integra comunque le potenti estensioni 64 bit anche nel Sempron (Sempron 64).
• sempre nel mercato desktop, la fascia media esige
sempre un adeguato rapporto prezzo/prestazioni,
ma cerca prestazioni migliori che garantiscano per
la macchina una obsolescenza meno rapida. Appartengono a questa categoria gli ormai economici Pentium 4 e Pentium D serie 800 e 900 e gli AMD
Athlon 64. La cache integrata è più abbondante e
le frequenze possono raggiungere valori superiori;
il prezzo del processore non aumenta di molto, ma
aumenta proporzionalmente di più il prezzo del sistema, in quanto gli assemblatori abbinano questi
processori a una componentistica meno economica nel tentativo di proporre macchine complessivamente più equilibrate.
• vi è poi una fascia di utenti professionali o "residenziali evoluti" che guardano più alle prestazioni
che al prezzo (ma senza perdere di vista quest'ultimo): a questi clienti si rivolgono i processori di
fascia alta come gli Intel Pentium Core o Core 2, o
gli AMD Athlon 64 X2.
• infine, gli appassionati di "gaming" e "modding"
che possono disporre di un budget sostanzialmente illimitato esigono il massimo di prestazioni a
qualunque costo; sono disposti a investire in configurazioni grafiche SLI in cui ogni scheda può costare oltre 700 euro, pertanto anche una maggior
spesa di 300-400 euro per avere un processore più
veloce anche solo del 20% non incide più di tanto
sul budget totale.
A loro (nonchè, naturalmente, agli utenti professionali più esigenti) Intel e AMD dedicano rispettivamente i processori Pentium Extreme Edition/
Core 2 Extreme Edition (dual o quad core) e la linea Athlon 64 FX (specie nella nuova architettura
Quad FX).
È importante notare che il prezzo dei processori non cresce affatto linearmente con le prestazioni,
ma tende a decollare una volta oltrepassata la fascia
media.
Viceversa, i processori di fascia bassa hanno prezzi indubbiamente invitanti, ma il livello di prestazioni
rischia di decadere troppo rispetto a macchine più
equilibrate.
Densità di transistor e problemi tecnologici
e termici
Qualunque sia la strada architetturale scelta per
ottenere un aumento di prestazioni dalla CPU, attraverso un aumento delle dimensioni della cache,
oppure un progetto superscalare con più unità di
esecuzione, oppure un progetto superpipelined con
catene di elaborazione a più fasi e dotate di catene
Dato l’elevato
consumo elettrico e la
conseguente dissipazione
termica, i processori
moderni necessitano di
sistemi di dissipazione
adeguati. Il tipo più
classico di dissipatore
è costituito da un corpo
alettato dotato di una
ventola termostatica
a velocità variabile: la
velocità della girante, e
quindi il flusso d’aria, è
sotto il controllo del BIOS
parallele per la riduzione della latenza e circuiteria
di branch prediction, oppure un aumento del numero e della dimensione dei registri, o ancora un allargamento del bus verso la memoria o infine l’integrazione di diversi core nello stesso chip (multicore),
invariabilmente è richiesto un aumento del numero
di transistor sul chip.
Un 386DX di 15 anni fa conteneva circa 275.000
transistors; oggi un Core2 QX6700 quad core, soprattutto a causa degli 8 MB di cache incorporata in cui
ogni bit richiede 6 transistors, contiene 582 milioni
di transistors, oltre 2.000 volte di più, in un chip di
dimensioni esterne simili. E la frequenza di lavoro è
cresciuta dai 33 MHz del 386 ai 2.66 GHz del QX6700:
un aumento di quasi 80 volte.
Ogni transistor quando commuta il proprio stato, consuma una certa quantità di corrente e dissipa parte di questa energia in calore. E quanto più
frequentemente ogni transistor commuta il proprio
stato, tanto maggiore sarà la quantità complessiva
di calore generato.
È chiaro che per far coabitare e funzionare insieme un maggior numero di transistor in uno spazio
così ristretto, senza che il calore sviluppato faccia
crescere la temperatura e superi livelli pericolosi,
ma senza rinunciare a un aumento della frequenza
- così importante per aumentare le prestazioni - è
stato necessario applicare contemporaneamente diverse tecniche:
1.4.1.6
Riduzione della
tensione di
funzionamento
Riduzione della tensione di funzionamento.
Il 386DX lavorava a 5V; i processori attuali lavorano a tensioni molto inferiori, nell’intervallo fra 0.8 e
1.6 V a seconda dei modelli, del clock e delle condizioni di funzionamento. La riduzione della tensione
di lavoro ha come conseguenza una riduzione del
consumo energetico e quindi del calore sviluppato.
Tuttavia attuare in modo corretto questa strategia
non è così facile in quanto ogni specifico modello di
processore ha sue proprie esigenze in fatto di tensione di lavoro; la tensione può dipendere perfino
dal particolare lotto di produzione, inoltre durante
il funzionamento il processore può accorgersi che il
carico di lavoro si è ridotto e quindi porsi automaticamente in condizioni di risparmio energetico, richiedendo in tempo reale una riduzione della tensione di alimentazione, riducendo il clock, disattivando
alcune aree, e così via.
Non esiste, quindi, una tensione standard di lavoro adatta a tutte le installazioni e neppure a tutte le
PC Open 25 www.pcopen.it
1.4.3.4
Densità di transistor
e problemi
tecnologici e termici
IT administrator - Hardware
Una cella Peltier sfrutta
l’effetto termoelettrico
per creare una differenza
di temperatura fra le sue
due facce: il fenomeno
può essere sfruttato per
asportare efficacemente
calore. A differenza
di qualunque ventola,
questa tecnologia
è assolutamente
silenziosa, purtroppo il
rendimento è basso e il
costo piuttosto elevato
1.4.3.4
Riduzione delle
dimensioni dei
transistor
Le parti costitutive
di un sistema di
raffreddamento a liquido.
Le proprietà termiche
dell’acqua vengono
sfruttate per asportare in
modo rapido ed efficace il
calore verso un radiatore
collocato altrove,
magari accoppiato ad
una silenziosa ventola
di grandi dimensioni a
bassa velocità
situazioni di funzionamento di una stessa installazione, ma è necessario che la motherboard fornisca alla
CPU esattamente la tensione che questa richiede, nel
momento in cui la richiede. Questa prestazione sarebbe difficile da fornire se la circuiteria di controllo
si trovasse nell’alimentatore del PC.
Per questo l’architettura PC prevede, ormai da
molti anni, la presenza di un sofisticato sistema di
regolazione del voltaggio (Voltage Regulator Module,
o VRM), che può essere incorporato sulla motherboard oppure ospitato su un modulo da collegare a
essa. Il VRM dialoga costantemente con il processore e da questo riceve, all’accensione e durante il funzionamento, indicazioni precise sulla tensione che gli
deve essere fornita. Anche se il VRM incorpora una
circuiteria intrinsecamente analogica, il suo controllo è completamente digitale. In particolare, l’indicazione da parte della CPU della tensione richiesta è
espressa sotto forma di un particolare codice, detto
VID (Voltage Identificator), codificato come un valore a 6 bit che viene comunicato attraverso 6 pin del
socket appositamente riservati per questo scopo. A
seconda del codice comunicato, il VRM può erogare tensioni comprese fra 0.8375 V e 1.6 V. Non è facile per un VRM coniugare precisione, stabilità ed
abbondanza di erogazione: i più esigenti processori
moderni, in situazioni di carico massimo, richiedono correnti di picco anche di 120-150 A su tensioni
di circa 1.2 V.
In futuro ci si aspetta che le tensioni calino ancora
(ben al di sotto di 1 V) e richiedano una precisione di
regolazione ancora maggiore, mentre le correnti potranno crescere ancora, anche fino a 300 A di picco.
Riduzione delle dimensioni dei transistor
I transistor del 386 erano costruiti con geometria
a 1 micron. Oggi i processi produttivi usati riescono
a costruire transistor con geometria a 0.09 micron
(90 nm) e 0.065 micron (65 nm), con la prospettiva
di scendere a breve a soli 45 nm. In termini lineari si
tratta di una riduzione, rispettivamente, di 10, 15
e 20 volte, corrispondente a una
riduzione di area
di 100, 225 e 400
volte. Transistor
più piccoli significano due cose: da un lato, la
possibilità di integrarne un maggior numero sulla stessa area; dall’altro, un minor fabbisogno di corrente per farli commutare, e quindi un minor consumo energetico e una
minore dissipazione termica.
Applicazione di sistemi attivi di dissipazione termica. Pur con l’impiego di tutte le tecniche citate,
la dissipazione dei processori moderni ad alte prestazioni può superare di slancio i 100W. Se questa
potenza termica non venisse asportata con pari ra-
Per aumentare
l’efficienza dello scambio
termico si può applicare
uno strato di pasta
termica tra la CPU e il
dissipatore
PC Open 26 www.pcopen.it
Lezione 2
pidità, la temperatura del
processore tenderebbe a
crescere fino livelli tali da
provocare inconvenienti
funzionali prima e guasti
fisici poi. Il processore si
danneggerebbe irreparabilmente entro pochi minuti di utilizzo. È per questo
che ai tempi del 386, per restare nei limiti nominali di
temperatura operativa ammessa, bastava la naturale
circolazione d’aria all’interno del case del PC, mentre
nel caso dei processori moderni servono potenti (e
rumorose...) ventole di raffreddamento a controllo
termostatico e velocità variabile.
In realtà, per la stabilizzazione del regime termico
del processore e delle altre componenti dell’architettura soggette al maggiore rischio di surriscaldamento, non esistono solo le ventole.
I sistemi di raffreddamento per la CPU si differenziano anzitutto in attivi e passivi. Quelli passivi si affidano, per l’asportazione del calore, esclusivamente alla circolazione dell’aria basata su fenomeni convettivi: il sistema funziona perchè l’aria calda, meno
densa e più leggera, tende a salire rispetto all’aria
fredda.
Così, una superficie calda esposta tenderà a cedere calore all’aria circostante e quest’aria, scaldandosi, inizierà a salire, lasciando lo spazio ad altra
aria, più fredda, che continuerà il ciclo di raffreddamento.
La quantità di calore asportabile con questa tecnica passiva dipende dalla differenza di temperatura
fra la CPU e l’ambiente e dalla ampiezza della superficie della CPU.
Per aumentare l’efficienza dello scambio termico
si ricorre all’espediente di aumentare la superficie
di scambio termico CPU-aria costruendo in metallo
(buon conduttore di calore) dei corpi alettati fissati
alla CPU mediante apposite paste termoconduttive.
Quanto maggiore sarà la superficie del corpo alettato, tanto maggiore sarà la quantità di calore asportabile ogni secondo, ossia la potenza di raffreddamento.
Con questi sistemi non è possibile però asportare
potenze termiche dell’ordine di quelle generate dalle
CPU più recenti (anche 100W): se può essere asportata solo una parte di questa potenza, il resto rimarrà
nel processore e accumulandosi ne farà aumentare la
temperatura, un processo che non può essere lasciato senza controllo pena il danneggiamento del chip.
Per aumentare la potenza termica rimossa si ricorre a sistemi di raffreddamento attivi. Il tipo più semplice si basa sull’applicazione di una ventola al corpo
alettato passivo, per aumentare la velocità dell’aria
rispetto alla superficie di scambio termico: se viene
continuamente fatta affluire aria “fredda” sul dissipatore e continuamente ne viene rimossa quella da
esso riscaldata, aumenta l’efficienza dello scambio
e quindi accelera il ritmo di asportazione di calore. Con questi sistemi la potenza di raffreddamento
può raggiungere i livelli necessari a mantenere sotto
controllo e nei limiti tollerabili la temperatura di un
processore moderno. Tuttavia vi è un inconveniente, rappresentato dalla rumorosità della ventola, sia
in termini di potenza acustica (misurata in dB) sia in
termini di frequenza (misurata in Hz), quest’ultima
dipendente dalla velocità di rotazione (misurata in
giri al minuto, o RPM).
A parità di flusso d’aria generato, una ventola di
diametro maggiore può girare più lentamente ed
emettere minor rumore meccanico. Inoltre, per mantenere al minimo il rumore della ventola, oggi sono
Lezione 2
standard sistemi di controllo termostatico con retroazione per governare la velocità di rotazione della girante adeguandola alla temperatura rilevata da
appositi sensori sulla motherboard e sulla CPU. Appena la temperatura rientra al di sotto di una soglia
prefissata, la ventola viene fatta rallentare per ridurre l’emissione di rumore. Se, al contrario, la CPU entra in una fase di calcoli impegnativi, entro qualche
secondo la temperatura inizierà a salire e la ventola
sarà fatta momentaneamente accelerare.
La ventola di raffreddamento della CPU può essere fornita direttamente dal fabbricante, insieme al
processore (in questo caso si parla di versione “boxed”), oppure essere applicata a cura dell’assemblatore o dell’utente. In alternativa all’impiego di tradizionali ventole esistono sistemi di raffreddamento
con circolazione di liquido nei quali, grazie al calore
specifico del fluido refrigerante (di solito acqua) ben
maggiore di quello dell’aria, è più facile asportare calore dal processore e dissiparlo poi in un vero e proprio “radiatore” collocato altrove, con la possibilità
di costruirlo di maggiori dimensioni e accompagnarlo con una grande e silenziosa ventola a bassa velocità anzichè con una piccola e rumorosa ventola ad
alta velocità.
In altri sistemi la trasmissione di calore avviene
mediante le cosiddette heat pipes, bacchette di rame
cavo riempite di fluido (per esempio acqua o ammoniaca) a bassa pressione. In queste condizioni l’evaporazione può avvenire anche a temperature relativamente basse e il vapore può circolare nel canale a
velocità prossime a quella del suono, trasportando
con estrema efficienza il calore dall’estremità calda
a quella fredda, ove il vapore cede calore, condensa tornando allo stato liquido e si prepara così per
il prossimo ciclo. Grazie a questo fenomeno, le heat
pipes asportano il calore dalla CPU con efficienza
enormemente superiore a quella che avrebbe una
bacchetta di rame massiccio della stessa sezione.
Esse non possono abbassare la temperatura complessiva: il loro effetto è solo quello di tendere a uniformare la temperatura della zona calda e della zona
fredda. Mantenendo ben raffreddata quest’ultima si
ottiene quindi, in ultima analisi, un abbassamento
della temperatura della zona calda. Teoricamente,
i sistemi in assoluto più silenziosi sono quelli che si
basano su celle Peltier: elementi refrigeranti a stato
solido, a forma di sottile piastrina, in cui, sfruttando l’effetto termoelettrico, si produce una rilevante
differenza di temperatura fra le due facce del dispositivo.
Le celle di Peltier non hanno parti in movimento
e non emettono alcun rumore, ma consumano molta
potenza elettrica (per esempio, un elemento in grado di dissipare 80-90W di potenza termica potrebbe
richiedere 160W di potenza elettrica) e non risolvono il problema del raffreddamento, ma lo “spostano”
solamente: infatti la faccia calda della piastrina Peltier andrà a sua volta raffreddata in modo opportuno
(e dovrà essere asportato anche il calore aggiuntivo
generato dalla piastrina stessa per il proprio funzionamento). Costo elevato e assorbimento elettrico
esorbitante fanno di questi sistemi una soluzione più
teorica che commercialmente praticabile.
IT administrator - Hardware
a temperatura ambiente, almeno la potenza data
dal TDP, e questo in condizioni di rumorosità accettabili.
Per questo sarà preferibile sovradimensionare il
dissipatore, così che possa assolvere al suo compito senza dover essere spinto al limite delle sue
capacità (con probabile maggior emissione di rumore).
• Resistenza termica (espressa in gradi per Watt)
– esprime la differenza di temperatura che deve
stabilmente instaurarsi fra l'aria e la superficie di
scambio perchè sia possibile dissipare 1 W di potenza termica.
Più è bassa la resistenza termica, migliore è la propensione del dissipatore a cedere calore all'ambiente, e di conseguenza la sua efficacia di raffreddamento. Un buon sistema di raffreddamento a liquido esibisce valori di resistenza termica dell'ordine di 0.30 K/W: in altre parole, con una differenza
di 30 gradi può dissipare con continuità 100 W di
potenza termica.
Oppure, ribaltando il concetto, si potrà concludere che se il processore dissipa 100W, applicando
un sistema da 0.30 K/W il processore si stabilizzerà a una temperatura superiore di 30 gradi alla temperatura ambiente (per es. 25 °C + 30 °C =
55 °C).
• Rumorosità (espressa in dB). La rumorosità è un
fattore di importanza fondamentale per sistemi destinati all'uso residenziale, soprattutto se indirizzati all'impiego come Media Center: un fastidioso
fruscio di raffreddamento disturberebbe l'ascolto.
Si tenga presente che il dB è una unità di misura
logaritmica, pertanto un aumento di 10dB corrisponde a una decuplicazione del livello di rumore. In un ambiente silenzioso si registrano circa 30
dB; in un ufficio affollato o al ristorante si arriva a
60 dB; una fabbrica rumorosa o un camion in accelerazione a breve distanza corrispondono a un
livello di 90 dB, mentre 130-150 dB rappresentano
l'emissione sonora di un aereo in decollo.
Un sistema di raffreddamento sufficientemente silenzioso non dovrebbe mai superare livelli di rumorosità compatibili con quello dell'ambiente in
cui esso dovrà funzionare.
Infine, oltre all'intensità di rumore va considerata la frequenza: un sistema con ventola emette un
suono la cui tonalità dipende dalla velocità di rotazione (in genere compresa fra
2.000 e 5.000 giri/
minuto)
I processori montati su
connettori di tipo “Slot”
permettono di sfruttare
gli spazi in modo
completamente diverso
da quello delle classiche
soluzioni a Socket
(qui una motherboard
multiprocessore con 4
Xeon su Slot 2)
Un processore Opteron
(qui privo di dissipatore)
montato sul proprio
socket 940
In generale i parametri per valutare un sistema di
dissipazione comprendono:
• La potenza termica totale che il PC richiede di
poter dissipare (Thermal Design Point, o TDP):
espresso in Watt, questo è il dato di input per lo
studio del dissipatore adatto al nostro sistema. Esso dovrà essere in grado di dissipare stabilmente,
PC Open 27 www.pcopen.it
IT administrator - Hardware
Lezione 2
Nei socket LGA
i pin si trovano sul
socket solidale con la
motherboard, mentre la
CPU contiene solo le sedi
per ospitarli
Data la necessità di
montare un dissipatore
su quasi tutte le
CPU attuali, i socket
prevedono sempre
qualche forma di
ancoraggio sicuro per
la struttura del corpo
alettato
1.4.3 Slot e Socket
In un socket PGA, i pin
sono sul processore,
e il socket contiene le
relative sedi.
Slot e Socket
Il montaggio della CPU sulla motherboard avviene mediante una apposita sede che deve assicurare
un fissaggio estremamente saldo e senza falsi contatti, nonchè caratteristiche termiche ed elettriche
tali da consentire un funzionamento sicuro e stabile
al processore.
A seconda del produttore, dei modelli di processore, dei requisiti meccanici, termici e geometrici in
tema di ingombri e ventilazione, dell’impostazione
fisica generale del sistema, del numero di pin e perfino delle “mode”, la sede di montaggio per la CPU
può presentarsi sotto due differenti aspetti: quello
di un socket piano a matrice di contatti (socket), oppure quello di un connettore a sviluppo lineare simile per molti versi a quello dei moduli di memoria
DIMM (slot).
Dopo una parentesi di alcuni anni in cui i Pentium
II, Pentium III, alcuni Celeron e alcuni Xeon hanno
adottato un sistema di installazione a slot, attualmente i più recenti modelli di processore per sistemi
desktop, notebook e server adottano tutti dei socket,
seppure di diverso tipo.
All’interno delle rispettive categorie, socket e slot
si differenziano per le loro caratteristiche geometriche, il numero di pin e la disposizione dei pin ostruiti o tacche di riscontro previsti per evitare accidentali
inserimenti errati, il tipo di
contatti e di meccanismo di
fissaggio, la frequenza del
bus e il range di tensioni di
lavoro supportate.
Gli zoccoli con dispositivo
ZIF (Zero Insertion Force)
prevedono una levetta
per lo sbloccaggio delle
sedi dei pin
PC Open 28 www.pcopen.it
Spesso l’introduzione di un nuovo socket risponde a esigenze tecniche di allargamento della banda
verso la memoria, aumento delle frequenze di lavoro
raggiungibili, idoneità termica a processori di maggior consumo; ma altrettanto spesso, verrebbe da dire che l’introduzione di zoccoli con pin spostati e altre piccole varianti rispondono soprattutto a ragioni
di marketing, per impedire l’uso di nuovi processori
su schede madri vecchie (o viceversa), o per bloccare la possibilità dei concorrenti di produrre processori compatibili a livello di piedinatura con i propri.
Quando un produttore riesce a mantenere stabile
per almeno 2-3 anni l’insieme dei formati degli slot o
socket impiegati dai propri processori, ciò ha effetti
positivi sul mercato, sulle possibilità di aggiornamento ed upgrade dei sistemi e sulla dinamica dei prezzi. Cambiamenti troppo frequenti a queste specifiche
obbligano invece gli utenti a sostituire praticamente
tutta la macchina ogniqualvolta vogliano effettuare
un upgrade significativo.
In particolare, per quanto riguarda i socket, al di
là del numero, della disposizione e del significato
dei pin, sul mercato hanno preso piede due tipologie
costruttive fondamentali: il sistema Pin Grid Array
(PGA) e il sistema Land Grid Array (LGA).
Un socket PGA è costituito da una matrice (a pianta approssimativamente quadrata) di sedi per i pin
che sono solidali con il chip del processore.
Nel socket LGA avviene il contrario: sul socket si
trovano i pin, rivolti verso l’alto, mentre il processore ospita le sedi. Questo tipo di socket ha il vantaggio
di supportare una maggiore densità di pin e di avere costi di fabbricazione inferiori. Uno svantaggio è
legato al fatto che in caso di esecuzione imperfetta
della manovra di montaggio o smontaggio dei chip,
si potranno danneggiare i pin della motherboard e
non quelli della CPU. Alla lunga qualche pin potrebbe rompersi, costringendo l’utente a cambiare l’intera motherboard.
Per ridurre il rischio di danneggiare i pin durante
le manovre di inserimento o rimozione, tutti i tipi di
socket più diffusi dispongono di un sistema di aggancio/sgancio che permette di inserire o rimuovere il
chip senza dover vincere alcuna resistenza: il sistema è azionato di solito da una levetta che controlla
lo sbloccaggio dei pin nelle rispettive sedi.
Il sistema è identificato dall’acronimo ZIF (ZeroInsertion Force). Nel caso delle CPU con fissaggio su
slot, sono previsti agganci sostanzialmente simili a
quelli di cui dispongono gli slot per i moduli DIMM,
ma più macchinosi, a causa della molto maggiore al-
Lezione 2
IT administrator - Hardware
tezza raggiunta dalla processor board rispetto al piano della scheda madre.
Per esempio, i processori Slot 1 in formato SECC
avevano una sorta di “incastellatura”, solidale alla
motherboard, che presentava ganci di ritenuta in
grado di ancorarsi ad appositi riscontri ricavati sull’involucro del CPU cartridge.
Un’ulteriore complicazione nel montaggio della
CPU dipende dalla necessità, praticamente ineliminabile con i processori attualmente più diffusi, di
montare un adeguato dissipatore sulla CPU.
Il dissipatore ha una massa decisamente non tra-
scurabile ed è necessario che sia fissato in modo saldo alla CPU, sia per assicurare un buon contatto con
la sua superficie e quindi un efficace scambio termico, sia per evitare il rischio che una volta posizionato
il PC nella sua giacitura d’uso (orizzontale o verticale
che sia), il corpo alettato possa staccarsi e cadere su
qualche elemento circuitale della motherboard, col
rischio di rovinare qualche pista o qualche saldatura nell’urtarla.
Per queste ragioni, le sedi di montaggio dei processori sono sempre predisposte anche per l’aggancio dell’impalcatura di un dissipatore.
Alcuni dei più diffusi tipi di socket e slot per il montaggio di processori
su PC desktop e laptop
Nome
Socket 7
Tipo
Socket
Socket 8
Slot A
Slot 1
Socket
Slot
Slot
Slot 2
Slot
Socket A
Socket
Socket 754
Socket
Socket 939
Socket
Socket 940
Socket
Socket AM2
Socket
Socket S1
Socket
Socket 370
Socket
Socket 478
Socket
Socket 479
Socket
Socket 775
Socket
Socket F
Socket
Tecnologia Produttore Processori
PGA-ZIF
Intel
Intel Pentium; AMD
K5 e K6
PGA-ZIF
Intel
Intel Pentium Pro
SECC
AMD
AMD Athlon
SECC
Intel
Intel Pentium II,
Pentium III, Celeron
SECC
Intel
Intel Pentium II Xeon,
Pentium III Xeon
PGA-ZIF
AMD
AMD Athlon, Athlon
XP, Duron, Sempron,
Athlon MP
PGA-ZIF
AMD
AMD Athlon 64,
Sempron, Turion 64
PGA-ZIF
AMD
AMD Athlon 64, 64
FX, 64 X2, particolari
modelli Opteron serie
100; memoria DDR
Unregistered
PGA-ZIF
AMD
AMD Athlon 64 FX51, Opteron serie
100, 200 e 800
con memoria DDR
Registered
PGA-ZIF
AMD
AMD Athlon 64,
64 X2, 64 FX e
Sempron, con
memoria DDR2
PGA-ZIF
AMD
AMD Turion 64, 64X2
e Athlon 64 Mobile
PGA-ZIF
Intel
Intel Celeron e
Pentium III
PGA-ZIF
Intel
Intel Pentium 4,
Pentium 4 EE,
Pentium D, Celeron,
Celeron D
PGA-ZIF
Intel
Intel Pentium M,
Pentium III M,
Celeron M, Core Solo
e Duo
LGA
Intel
Intel Pentium 4, 4 D
e 4 EE, Celeron D,
Core 2 Duo, Core 2
Extreme
LGA
AMD
Opteron serie 2000
e 8000, Athlon 64 FX
serie 70 per Quad FX
Pin
321
Tensioni (V)
2.5-3.5
FSB (MHz)
66
387
2.1-3.5
66-75
242
1.65-2.80
66-133
330
1.3-3.3
66-133
453
1.1-2.05
100-200
754
0.8-1.55
200
939
0.8-1.55
200
940
0.8-1.55
200
940
0.8-1.55
200
638
370
200
1.05-2.1
66-133
478
100-200
479
166
775
133-266
1207
200
PC Open 29 www.pcopen.it
IT administrator - Hardware
Materiale didattico
progettato per EUCIP
IT Administrator
segnalato da AICA
Modulo 1 - Hardware
“AICA, Licenziataria
esclusiva in Italia
del programma
EUCIP (European
Certification
of Informatics
Professionals)
riconosce che il
materiale didattico
segnalato è
strutturato in
modo coerente con
l’organizzazione dei
contenuti prevista
dai documenti
EUCIP di riferimento.
Di conseguenza
AICA autorizza sul
presente materiale
didattico l’uso
dei marchi EUCIP
(registrato dal
CEPIS Concil
of European
Professional
Informatics
Societies) ed AICA
protetti dalle leggi
vigenti.”
1.5 Memoria
1.5.1 RAM
1.5.1.1 Capire
l’accezione dei
termini: RAM e
ROM e conoscere
le differenze che
intercorrono fra loro
Lezione 3
A scuola con PC Open
Capire le memorie RAM e
ROM e il loro ruolo nel PC
Arriviamo alla terza puntata del corso hardware nella
quale mettiamo sotto esame le memorie del PC, dopo
aver trattato nei numeri scorsi la scheda madre e la CPU.
Impareremo a riconoscere le differenze tra RAM e ROM,
a cosa serve la memoria cache
che si trova nei processori e a
distinguere le diverse tipologie
di moduli di memoria più
comunemente usate su desktop e
notebook di Marco Mussini
ome abbiamo visto nella prima puntata, le principali attività elementari che un PC svolge in
gran numero e in modo accuratamente concertato per assolvere ai compiti complessi che gli sono
affidati sono essenzialmente tre: scambiare dati con
l’esterno, elaborarli ed immagazzinarli.
Mentre l’elaborazione dei dati è compito della
CPU, e dell’interscambio con l’esterno si incaricano
le porte di comunicazione e le periferiche di I/O, il
componente logico che si occupa dell’immagazzinamento dei dati è la memoria, soprattutto nelle note
varianti RAM e ROM.
Esistono varie tecnologie di immagazzinamento
dei dati, a seconda delle finalità e modalità:
• tipo di dati da memorizzare (per esempio: dati o
programmi),
• frequenza con cui si intende accedervi,
C
Calendario delle lezioni
Lez 1: la scheda madre e il BIOS
Lez 2: i processori
Lez 3: la RAM
Lez 4: bus e risorse di sistema
Lez 5: interfacce
Lez 6: memorie di massa
Lez 7: i monitor e le schede grafiche
Lez 8: le stampanti
Lez 9: hardware di rete
In collaborazione con
Lez 10: alimentatori
e installazione nuovo
hardware
Lez 11: risoluzione dei
problemi
PC Open 30 www.pcopen.it
PDF DEL CORSO
NEL DVD
• tempo di risposta richiesto: si va da tempi dell’ordine del nanosecondo nelle memorie a semiconduttore più veloci, a millisecondi nelle unità
a disco, fino anche a diversi secondi nelle unità
a nastro.
• forma d’accesso: sola lettura (per esempio: CDROM) o lettura/scrittura (per esempio: RAM, dischi fissi)
• per le memorie che supportano lettura e scrittura: eventuale prevalenza statistica delle letture o
delle scritture,
• ordine tipico di accesso ai dati (per esempio: prevalentemente sequenziale oppure libero)
• carattere volatile o persistente della forma di memorizzazione: il contenuto della memoria volatile (tipico esempio è la RAM) si perde allo spegnimento dell’unità, mentre la memoria persistente
(spesso chiamata memoria di massa nel caso di
dischi, nastri e oggi anche flash memory) la mantiene per tempi lunghissimi anche senza alimentazione.
Delle memorie di massa a tecnologia magnetica e
ottica parleremo nella lezione 6 del corso. In questa
puntata approfondiremo invece le caratteristiche e i
campi d’impiego tipici delle memorie a semiconduttore, che sono il tipo di memoria più usato nelle applicazioni in cui servono un’alta velocità e alte prestazioni in lettura e scrittura, è eventualmente accettabile che i dati non vengano mantenuti a computer
spento e l’accesso ai dati avverrà secondo un ordine
arbitrario, non necessariamente sequenziale.
Queste memorie appartengono a tre gruppi principali fortemente specializzati per altrettante destinazioni d’uso e per questo differiscono considerevolmente per architettura costruttiva e modalità di
funzionamento. Si tratta delle già citate RAM e ROM
e della cache memory di cui parleremo più avanti.
Lezione 3
• La RAM (Random Access Memory, o “memoria ad
accesso casuale”) è spesso considerata la memoria …per antonomasia. È qui che risiedono i dati
attuali e le istruzioni dei programmi in esecuzione. Si tratta di un tipo di memoria volatile a lettura/scrittura caratterizzato da capacità piuttosto
elevata, tempi d’accesso bassi - dell’ordine dei nanosecondi – sia in lettura sia in scrittura e soprattutto sostanzialmente indipendenti dall’ordine di
lettura dei dati (donde il nome). A causa delle difficoltà costruttive, i costi di queste memorie sono piuttosto alti e crescono rapidamente con la
velocità d’accesso e con la capacità. Le memorie
RAM possono essere statiche (SRAM) o dinamiche (DRAM) a seconda della necessità di essere
costantemente alimentate oppure di essere anche soltanto periodicamente riscritte (o, come si
suol dire, “rinfrescate”: si parla allora di refresh).
Per ragioni di costo e capacità, i moduli RAM comunemente in uso nei PC sono tutti fondamentalmente di tipo DRAM, seppure con diverse varianti costruttive. Le SRAM, più piccole e costose ma
anche più veloci, sono utilizzate in applicazioni
particolari, spesso “a complemento” di tipi di memoria più lenti, con i quali esse risultano per molti
versi complementari.
• Quella delle ROM (Read Only Memory, o “memoria a sola scrittura”) è una classe di memorie non
volatili, leggibili a buona velocità ma non scrivibili (oppure scrivibili un numero limitato di volte,
in modo relativamente lento, richiedendo spesso di effettuare prima una speciale operazione di
“cancellazione” totale o parziale). Appartengono a
questa categoria anche le memorie flash, che sono
un tipo di ROM riscrivibile e organizzato a settori
come un disco, realizzabile a costi bassi e con capacità superiori a quella delle RAM. Su memorie di
tipo ROM sono memorizzate di solito informazioni che non cambiano o che cambiano molto raramente come il firmware, il BIOS e così via.
• La cache memory, più che una tecnologia costruttiva, è uno schema logico in cui un banco relativamente piccolo (da 8 Kbytes a qualche Megabyte)
di memoria ad altissima velocità lavora fra un dispositivo veloce e una memoria lenta, per colmare in parte il gap di prestazioni fra le esigenze del
primo e la lentezza intrinseca della seconda e velocizzare l’interscambio di dati fra essi. Nell’applicazione più frequente e più importante, la cache
lavora fra la CPU e la memoria RAM. In considerazione di queste esigenze che fanno passare in secondo piano il costo, la cache memory della CPU
è sempre realizzata con la più veloce RAM statica.
Da notare che uno schema cache assolutamente
analogo è usato anche per migliorare le prestazioni delle memorie di massa relativamente lente,
come i dischi fissi: in questo caso, viste le tempistiche in gioco, per la cache può essere sufficiente impiegare la più economica DRAM (di solito 8
o 16 Mbytes).
Conoscere le differenze tra memoria statica e
dinamica
Come già accennato, esistono due tipi di RAM: la
RAM Statica (SRAM) e la RAM Dinamica (DRAM). La
SRAM trova impiego, in quantità relativamente piccole, soprattutto all’interno del processore e più raramente sulla motherboard e in alcune periferiche
ad alta velocità. La DRAM è invece la tecnologia a cui
appartengono i tipi di RAM che si acquistano sotto
forma dei familiari moduli DIMM, attualmente in tagli
dell’ordine dei 512MB o del gigabyte, per espandere
IT administrator - Hardware
la memoria del proprio PC.
Entrambe volatili e caratterizzate da tempi d’accesso sostanzialmente uguali in lettura e scrittura e
indipendenti dall’ordine di lettura dei dati, la SRAM
e la DRAM differiscono per costo costruttivo e densità d’informazione memorizzabile (più economica
e più densa la DRAM), consumo elettrico e velocità
(più parca e più veloce la SRAM).
Tali differenze discendono tutte dalla differente
tecnica costruttiva dei due tipi di memorie.
Nella memoria RAM statica (SRAM) ogni bit è memorizzato dallo stato elettrico di una rete di 4 transistor collegati fra loro in modo tale da ammettere due
stati stabili che si mantengono tali fintanto che viene
fornita alimentazione al circuito. A questi due stati si
attribuiscono i significati di 0 e 1. Per ogni bit ci sono
inoltre altri due transistor che governano l’accesso
in lettura/scrittura della cella. In totale, quindi, ogni
bit di una SRAM richiede 6 transistor.
Nella RAM dinamica, invece, ogni bit è memorizzato in un microscopico condensatore: si attribuisce il significato di 1 allo stato in cui il condensatore
è carico e quello di 0 allo stato in cui è scarico. Un
singolo transistor controlla il collegamento di questo condensatore con le linee di lettura/scrittura. In
totale, ogni bit di una DRAM richiede soltanto 1 condensatore e 1 transistor, vedi schema nella pagina a
fianco, il che rende possibile stipare un numero di
bit enormemente maggiore, a parità di spazio, in un
chip DRAM rispetto a un chip SRAM.
Considerando la questione da un altro punto di vista, si può invece dire che, a parità di capacità di memoria, realizzarla come una DRAM richiede un’area
di silicio inferiore, e quindi la difficoltà costruttiva
(e in ultima analisi il costo per megabyte) risulteranno inferiori.
Poiché però la DRAM immagazzina i bit in tanti
condensatori, che tendono spontaneamente a scaricarsi entro un certo tempo, si pone un problema di
persistenza dell’informazione memorizzata. Mentre
un bit 0, che corrisponde a un condensatore scarico,
può essere conservato indefinitamente, un bit 1 tenderà a “svanire” entro il tempo di scarica per dispersione del corrispondente microcondensatore, che,
a questa scala dimensionale, pur con le bassissime
tensioni e correnti in gioco, si aggira sulle decine di
millisecondi. L’unico modo per fare sì che la memoria non perda il suo contenuto è riscriverne periodicamente ogni singolo bit prima che sia trascorso
tale tempo. Questo processo si chiama rinfresco (re-
PC Open 31 www.pcopen.it
In una SRAM, ogni
singolo bit è memorizzato
in una rete fisicamente
costituita da 6 transistor
organizzati come in figura.
I transistor numerati
da 2 a 5, i soli che
servono effettivamente
per memorizzare
l’informazione, sono
collegati in modo da
costituire una rete
capace di mantenere
due possibili stati
di polarizzazione (la
tensione di attivazione
viene applicata
selettivamente a diversi
transitor). In un caso
sono aperti i transistor
2 e 5, e il 3 e il 4 sono
chiusi, oppure viceversa.
A queste due situazioni
vengono attribuiti i
significati di “bit 0”
e “bit 1”. I transistor
1 e 6 servono invece
per abilitare l’accesso
all’informazione
dall’esterno. Per leggere
o scrivere un bit occorre
attivare il segnale di
selezione linea, che
collega la cella con
il mondo esterno, e
poi agire sulle linee di
lettura/scrittura bit
IT administrator - Hardware
Una DRAM impiega un
circuito decisamente più
semplice e compatto
per memorizzare un
bit: sono sufficienti un
condensatore C, che nello
stato carico rappresenta
un “1” e in quello scarico
uno “0”, e il transistor
T, che funziona da
interruttore d’accesso
al condensatore. Per
leggere o scrivere C è
necessario polarizzare
(dare tensione
all’elettrodo di controllo)
il transistor T, attivando
il segnale di selezione
riga. Il dato risulta così
leggibile sulla linea di
lettura/scrittura bit.
Il condensatore C,
naturalmente, tende a
scaricarsi col tempo,
perciò il bit deve essere
riscritto prima che
“svanisca”. Questa
operazione si chiama
refresh, comporta un
certo dispendio di
energia, ed è una delle
cause del non indifferente
Gli antiquati moduli
SIMM (a 8 o a 32 bit)
avevano rispettivamente
30 oppure 72 contatti,
replicati su entrambi
i lati del modulo. Di
norma dovevano essere
installati a gruppi di due
o di quattro esemplari
di tipo identico per
comporre banchi di
memoria di formato
compatibile con il bus
dati del processore
(ad esempio 32 bit per
386DX e 486)
Il formato oggi più
diffuso è il DIMM,
un tipo di moduli di
memoria con ampiezza
di canale di 64 bit, il
che fa sì che non sia più
necessario installarli a
coppie per adeguarli alla
larghezza del bus dati del
processore. Questo tipo
di moduli può avere da
72 a ben 240 contatti a
seconda della famiglia di
appartenenza.
I moduli DIMM ad alte
prestazioni possono
dissipare una quantità di
calore elevata che è bene
dissipare efficacemente
per evitare un pericoloso
surriscaldamento
dei chip. A questo
provvedono, su alcuni
modelli, appositi involucri
metallici che fungono da
radiatore oltre a essere
graditi agli appassionati
di “modding” per il loro
aspetto
Lezione 3
sa e delicata, certamente non adatta all’upgrade “fai
da te”. In alternativa esistevano schede di espansione di memoria proprietarie, più pratiche dei singoli chip ma molto costose, essendo non standard.
L’installazione di un modulo di memoria standard
DIMM anziché quella dei singoli chip risulta più rapida, facile e a prova d’errore: un importante risparmio di tempo e denaro. Inoltre, i moduli di memoria
standard hanno un mercato più ampio delle vecchie
schede proprietarie, il che si traduce in maggior concorrenza e calo dei prezzi.
Nella storia ormai ventennale dei moduli DRAM
il numero e la disposizione fisica dei chip sul modulo e gli standard di connessione alla motherboard
del PC si sono naturalmente evoluti. Col tempo sono pertanto nate varie
tipologie di moduli di
memoria.
fresh) e richiede un certo tempo, durante il quale la
parte di memoria interessata non è accessibile: qualora la CPU volesse, proprio in quel momento, leggerla, verrebbe fatta attendere.
Questo è uno dei motivi per cui la RAM è meno
veloce della SRAM. Inoltre il processo di riscrittura
richiede evidentemente corrente elettrica, il che rende le DRAM energeticamente meno “parsimoniose”
delle SRAM. Non a caso, su dispositivi come i palmari o gli smartphone viene spesso usata la SRAM
(comunque in piccola quantità) al posto della DRAM
per ottimizzare i consumi elettrici e migliorare la durata della batteria.
Distinguere le diverse tipologie di moduli di
memoria, quali SIMM, DIMM e RIMM.
I PC moderni richiedono per il proprio funzionamento dei quantitativi di memoria sempre più elevati, che sarebbe difficoltoso e costoso fabbricare sotto forma di singolo chip. Per esempio: fabbricare un
chip da 1 Gbyte di DRAM richiederebbe di costruire
un chip relativamente grande da 8 Gbit, con ben 8 miliardi di transistor e 8 miliardi di microcondensatori
senza neppure un singolo guasto.
Risulta invece più praticabile ed economica la via
di fabbricare dei chip di capacità e dimensioni inferiori e di assemblarne un certo numero per costruire
un modulo di memoria in grado di fornire la capacità
complessiva desiderata. Inoltre, apportando variazioni alla disposizione circuitale dei chip elementari,
i produttori possono realizzare moduli di memoria
con prestazioni specifiche pur attingendo allo stesso
bacino di componentistica, il che aumenta le economie di scala dei produttori di chip DRAM.
Per esempio, pur servendosi degli stessi chip
DRAM elementari, è possibile costruire moduli di
memoria con o senza controllo di parità o sistema
di correzione d’errore, oppure moduli strutturati in
modo tale da migliorare le prestazioni in particolari
condizioni d’impiego (schede grafiche, sistemi multiprocessore). Più in generale, si può fare in modo di
aumentare le prestazioni senza dover attendere che i
chip DRAM diventino più veloci, ma organizzando gli
stessi chip in una struttura logica più efficiente.
Un vantaggio non trascurabile del fatto di raggruppare più chip di memoria su un modulo preassemblato sta nella semplicità d’installazione. Fino ai
primi anni ’90, espandere la memoria di un PC poteva richiedere di inserire manualmente un gran numero di chip DRAM elementari in altrettanti socket
predisposti sulla motherboard. Un’operazione tedio-
PC Open 32 www.pcopen.it
Nei moduli SIMM
(Single in-line memory
module), ormai caduti
in disuso, il connettore
aveva 30 contatti nei
primi modelli a 8 bit e
72 contatti in quelli a
32 bit. A seconda dei
modelli e della capacità del modulo, i chip potevano essere saldati sia su
un solo lato del modulo, sia su entrambi i lati; i contatti elettrici erano replicati su entrambi i lati. A causa dell’architettura a soli 8 o 32 bit dei SIMM, era
generalmente necessario installare questi moduli a
gruppi di due o di quattro unità identiche per adeguare la memoria all’ampiezza del bus dati del processore (32 bit per i 486 e 64 bit per i Pentium). Esistevano anche moduli SIMM con controllo di parità,
in grado di rilevare certe categorie di guasti e conseguenti errori, ma non di compensarli.
I moduli DIMM (Dual in-line memory module) sono
il formato oggi dominante nelle applicazioni PC. Caratterizzati da una ampiezza di canale di 64 bit, non
richiedono più di essere installati a coppie per po-
ter lavorare con processori a 64 bit come i Pentium.
I contatti sono molto più numerosi che sui SIMM (da
72 a ben 240 pin a seconda dei tipi) e non sono più
replicati identici su entrambe le facce del modulo come avveniva sui SIMM. Altra innovazione dei DIMM
è l’introduzione a bordo del modulo di un chip SPD
(Serial Presence Detect)
che
rende disponibili alla motherboard informazioni sul
tipo di modulo e sul
Lezione 3
suo regime di funzionamento, così che il BIOS possa
visualizzarli e soprattutto adattare automaticamente
i propri parametri di lavoro ai moduli DRAM installati, senza bisogno che vengano immessi da tastiera in fase di configurazione. Su alcuni tipi di DIMM
è disponibile non soltanto il controllo di parità ma
anche il sistema di correzione degli errori, di cui parleremo fra poco.
Molti dei moduli DIMM ad alte prestazioni più recenti dissipano una quantità di calore che col tempo
porterebbe a un pericoloso aumento della temperatura e per questo sono provvisti di un dissipatore che si
presenta come una placca metallica, a volte colorata,
che copre quasi per intero la superficie del modulo
Il formato RIMM (Rambus In-line memory module), ideato dalla società americana Rambus, è esteriormente piuttosto simile al DIMM. La differenza
principale sta nei chip elementari (che sono dello
speciale tipo RDRAM, Rambus DRAM) e soprattutto
nell’organizzazione logica dei chip e nella modalità
d’installazione dei moduli. L’idea di base per aumentare le prestazioni rispetto ai normali DIMM di prima
generazione era quella di adottare un canale dati di
larghezza minore (16 bit anziché 64 bit), con conseguente semplificazione circuitale, ma di far funzionare i moduli a una frequenza talmente maggiore da aumentare, nel complesso, la velocità di trasferimento
dati. Nei sistemi a 32 bit, o a doppio canale di memoria, i moduli RIMM da 16 bit vanno installati sempre a
coppie e se si decide di non equipaggiare tutti gli slot
della motherboard è necessario installare, in quelli
rimasti liberi, degli speciali moduli CRIMM (Continuity RIMM), privi di memoria, con funzioni passive,
puramente elettriche. Dopo un interesse iniziale soprattutto da parte di Intel, la memoria RIMM non ha
esibito particolari vantaggi di prestazioni che non
potessero essere colmati dai vari tipi di memoria disponibili in architettura DIMM, tanto che con i DIMM
DDR2 il gap è ormai stato chiuso e i DIMM DDR3 supereranno a breve le prestazioni delle RDRAM.
Al contrario, si manifestarono svantaggi di costo
(principalmente dovuti alle minori economie di scala), elettrici (maggiore sensibilità alle radiointerferenze con necessità di un più accurato progetto delle motherboard) e pratici (installazione a coppie, necessità di moduli terminatori). Tutto questo ha fatto
sì che il formato RIMM non abbia mai raggiunto grande diffusione nei PC. In altri settori come quello dei
videogiochi, invece, le RDRAM sono tuttora utilizzate in prodotti di rilievo come le PlayStation 2 e 3.
IT administrator - Hardware
mentata vertiginosamente la loro “fame” di dati da
elaborare, dati che il più delle volte devono provenire dalla RAM. Diventa quindi di cruciale importanza
aumentare al massimo la velocità di trasferimento
dati dalla RAM (“banda”: misurata in Mbyte/secondo), ma anche ridurre le attese prima che i trasferimenti abbiano inizio (“latenza”: misurata in cicli di
clock spesi in attesa).
I più semplici chip DRAM rispondono alle richieste “il più presto possibile” e accettano le richieste
in successione: una nuova richiesta non può essere presa in considerazione finchè non è terminata
l’elaborazione della richiesta precedente. In questo
quadro la CPU è costretta ad attese molto frequenti
e relativamente lunghe (alcuni cicli di clock di inattività).
La prima risposta al problema è stata l’introduzione di moduli SDRAM (Synchronous DRAM), nei
quali la comunicazione fra processore e modulo di
memoria avviene in modo regolato con maggior precisione. I dati richiesti non si affacciano ai morsetti
del modulo “appena possibile”, ma solo quando un
esplicito segnale di clock li abilita a farlo. Inoltre, la
circuiteria di controllo del modulo è in grado di accettare nuove richieste mentre è ancora in corso
l’elaborazione delle precedenti. Queste innovazioni sono molto “gradite” alla CPU in quanto riduco-
Un modulo CRIMM
(Continuity RIMM) la cui
installazione è necessaria
per la terminazione
(puramente elettrica) di
una catena di moduli
RIMM
Un modulo RIMM da
256 MB. Questo tipo
di memoria, ormai
caduto in disuso, era
caratterizzato da alte
frequenze di lavoro, che
compensavano il canale
dati meno ampio che nei
normali DIMM
I moduli DIMM
SDRAM, i primi moduli
a introdurre una più
precisa sincronizzazione
nelle comunicazioni fra
processore e memoria,
avevano un connettore a
168 pin con due tacche
di riscontro asimmetriche
no frequenza e durata delle attese nel suo dialogo
con la RAM. Grazie alla temporizzazione più precisa divenne inoltre possibile aumentare le frequenze rispetto ai precedenti tipi di moduli di memoria
asincroni, con un ulteriore aumento di prestazioni.
I moduli SDRAM avevano 168 pin e due tacche di riscontro asimmetriche sul connettore per evitare gli
errori di installazione.
Le memorie DDR-SDRAM costituirono la prima
evoluzione delle SDRAM. La sigla DDR significa “Double Data Rate”, a indicare che il ritmo di trasferimento dati viene raddoppiato grazie all’espediente di far
avvenire i trasferimenti non una, ma due volte per
ogni ciclo di clock.
Nei moduli di memoria DIMM DDR il
connettore ha 184 pin e una singola tacca
di riscontro asimmetrica
1.5.1.4 Conoscere
le prestazioni delle
diverse tipologie
di moduli DRAM/
SDRAM/DDR in
termini di tempo
d’accesso, capacità
ecc.
Conoscere le prestazioni delle diverse tipologie
di moduli DRAM/SDRAM/DDR
Con l’aumento delle prestazioni delle CPU è au-
PC Open 33 www.pcopen.it
IT administrator - Hardware
Lezione 3
I moduli SDRAM
Denominazione
moduli
Chip DRAM
impiegati
PC66
PC100
PC133
PC166
PC66
PC100
PC133
PC166
Frequenza di
funzionamento dei
chip (MHz)
66
100
133
166
Frequenza di
funzionamento
dei bus (MHz)
66
100
133
166
Trasferimenti
dati al secondo
(milioni)
66
100
133
166
Banda
(Mbyte/s)
533
800
1067
1333
I moduli DDR-SDRAM
Denominazione
moduli
PC1600
PC2100
PC2700
PC3200
Chip DRAM
impiegati
DDR-200
DDR-266
DDR-333
DDR-400
Frequenza di
Frequenza di
Trasferimenti
Bytes trasferiti
funzionamento funzionamento dati al secondo
per ciclo
dei chip (MHz) del bus (MHz)
(milioni)
100
100
200
8
133
133
266
8
166
166
333
8
200
200
400
8
Banda
(Mbyte/s)
1600
2133
2667
3200
I moduli DDR2-SDRAM
Denominazione
moduli
Chip DRAM
impiegati
PC2-3200
PC2-4200
PC2-5300
PC2-6400
DDR2-400
DDR2-533
DDR2-667
DDR2-800
Trasferimenti
Frequenza di
Frequenza di
Bytes trasferiti
funzionamento funzionamento dati al secondo
per ciclo
(milioni)
dei chip (MHz) del bus (MHz)
100
200
400
8
133
266
533
8
166
333
667
8
200
400
800
8
Un modulo DDR2 da 1
GB a 667 MHz (PC25300), con il connettore
a 240 pin e tacca singola
I moduli DDR3, la cui
diffusione di massa
dovrebbe iniziare nel
2007, permetteranno di
aumentare ulteriormente
le prestazioni rispetto
alle attuali DDR2. Il
connettore di questi nuovi
DIMM avrà ancora 240
pin, ma con la tacca di
riscontro in posizione
differente rispetto ai
DDR2
In pratica la circuiteria di controllo del modulo
DDR-SDRAM reagisce presentando un dato ai morsetti sia quando riceve il fronte di salita dell’impulso
di clock, sia quando riceve il fronte di discesa dello
stesso impulso di clock. I moduli DDR-SDRAM hanno
un connettore da 184 pin con un’unica tacca disposta quasi esattamente al centro del modulo.
Le memorie DDR2 hanno proseguito la strada imboccata con le DDR per aumentare ancora la velocità di trasferimento dati raggiungibile. Nei DIMM di
tipo DDR2-SDRAM, il bus di comunicazione con la
CPU funziona a una frequenza esterna esattamente
doppia di quella alla quale in realtà lavorano i chip
di memoria.
Questi funzionano ancora alle stesse frequenze
dei corrispondenti chip impiegati sui moduli DDRSDRAM. Pertanto, non vi è un vero aumento di flusso di dati fornibile con continuità alla CPU da parte
della RAM, in quanto l’origine dei dati non è diventata più veloce a fornirli. Il modulo è però diventato
PC Open 34 www.pcopen.it
Banda
(Mbyte/s)
3200
4267
5333
6400
due volte più veloce nella sua comunicazione con la
CPU. In particolare, rispetto a un modulo DDR, un
modulo DDR2 impiega esattamente metà tempo a
trasferire un dato alla CPU non appena esso diventa
disponibile, oppure a ricevere dalla CPU un dato da
scrivere in memoria.
Se volessimo paragonare un modulo DDR e un modulo DDR2 a due persone, potremmo dire che entrambe pensano le frasi alla stessa velocità, ma la
seconda riesce a pronunciarle più velocemente (anche se le fa seguire da un periodo di silenzio in quanto le occorre pur sempre del tempo per pensare alla
prossima frase da dire).
Le DDR2 incrementano dunque le prestazioni di
picco riferite ai periodi in cui hanno luogo scambi
di dati con la CPU, ma non migliorano la latenza dei
moduli, che resta praticamente costante in termini
di tempo e addirittura aumenta in termini di numero di cicli di clock (perché il clock è doppio rispetto ai DDR e i cicli durano un minor tempo). Ciononostante questo comportamento ha evidenziato un
certo miglioramento delle prestazioni, decretando
il successo delle DDR2 nei PC di larga diffusione. Il
connettore dei DIMM DDR2 ha 240 pin e una singola
tacca di riscontro.
Le memorie DDR3, le cui specifiche definitive sono
in via di approvazione con i primi prototipi funzionanti già esposti nelle fiere specializzate, si pongono due obiettivi di miglioramento rispetto alle DDR2:
un aumento di banda di picco (sempre accompagnato da un aumento della latenza espressa in cicli
di clock) e una importante riduzione di consumi. Il
primo obiettivo è stato perseguito raddoppiando ancora la frequenza del bus esterno, che diventa quadrupla rispetto alla frequenza interna di lavoro dei
Lezione 3
IT administrator - Hardware
I moduli DDR3-SDRAM
Denominazione
moduli
PC3-6400
PC3-8500
PC3-10600
Chip DRAM
impiegati
DDR3-800
DDR3-1066
DDR3-1333
Frequenza di
funzionamento
dei chip (MHz)
100
133
166
Frequenza di
funzionamento
del bus (MHz)
400
533
667
moduli.
La riduzione dei consumi elettrici, importante sia
per allungare l’autonomia dei portatili sia per ridurre il surriscaldamento e quindi il rumore delle ventole sui sistemi desktop e media center, è invece resa
possibile dalla tensione di funzionamento ridotta a
soli 1.5V. Il connettore dei DIMM DDR3 avrà ancora
240 pin, ma la tacca di riscontro (singola) avrà posizione diversa rispetto a quella dei moduli DDR2.
Come abbiamo più volte ricordato, la velocità di
trasferimento dati fra RAM e CPU non è tutto: riveste grande importanza anche la latenza, definita come il ritardo totale con cui il modulo RAM inizia a
fornire i dati richiesti. La latenza è misurata in cicli
di clock ed è la somma di vari ritardi elementari che
si verificano in vari punti dell’architettura logica del
DIMM e corrispondono ad altrettante fasi di funzionamento (vedi box “La RAM e le sue latenze”).
I produttori più scrupolosi dichiarano l’intero insieme di ritardi elementari per dar modo agli acquirenti di giudicare più dettagliatamente la qualità e le
prestazioni dei moduli di memoria; spesso però ci si
limita a dichiarare il solo valore del ritardo CAS, che
in moduli DDR assume generalmente valori fra 2 e 3
(e valori più alti, fra 3 e 9, per le memorie DDR2). In
generale si può dire che più basso è il valore delle
latenze dichiarate (specie del valore CAS), migliori
sono le prestazioni raggiungibili dal modulo di memoria, ma è anche estremamente importante che le
impostazioni della motherboard non scendano al di
sotto dei valori supportati dal DIMM, altrimenti si
verificheranno errori nei dati, blocchi del sistema o,
nel caso più fortunato, cali severi di prestazioni.
Controllo di parità e memoria ECC,
il loro funzionamento e i motivi alla base
Come ogni componente elettronico, anche la RAM
può andare incontro a guasti, soprattutto se si verifica
un deterioramento fisico dei microcircuiti a causa di
temperature di lavoro non sufficientemente controllate da un adeguato sistema di dissipazione. Proprio
per questo, le memorie ad alte prestazioni più recenti
sono spesso equipaggiate con un involucro metallico
che ha la funzione di migliorare la capacità di disperdere calore generato a bordo del modulo (oltre ad essere ormai diventato un aspetto ornamentale molto
apprezzato dai patiti del “modding”).
Il più semplice guasto che possa verificarsi in un
chip RAM è rappresentato da una cella che non riesce più a mantenere la memoria del “proprio” bit
per un tempo almeno pari all’intervallo fra due cicli di refresh, oppure nella quale non si riesce più
a scrivere o a leggere. A livello fisico, il primo guasto corrisponde alla compromissione dell’isolamento del microcondensatore della cella (che ne rende
troppo rapido il processo di scarica spontanea), il
secondo al deterioramento del relativo transistor
di controllo, che rende impossibile attivare l’accesso al bit. I guasti possono essere talmente gravi da
manifestarsi regolarmente, ogni volta che si accede
alla cella interessata, oppure dipendere dalla temperatura di lavoro, dall’ordine con cui arrivano le
Trasferimenti
Bytes trasferiti
dati al secondo
per ciclo
(milioni)
800
8
1066
8
1333
8
Banda
(Mbyte/s)
6400
8533
10667
richieste, dal clock o da altri fattori, e manifestarsi
quindi solo sporadicamente.
I guasti alla RAM, agli effetti pratici, provocano
una alterazione dei valori memorizzati, che quando
verranno riletti appariranno diversi da quelli originali. È però di vitale importanza che il PC possa
contare sull’assoluta integrità dei dati depositati in
memoria. Infatti l’alterazione del valore di un singolo bit, a seconda che capiti in una cella contenente
una istruzione di un programma oppure un dato,
può causare sia effetti devastanti e immediatamente evidenti sia effetti subdoli e destinati a rimanere
latenti fino a un secondo tempo, quando però sarà
troppo tardi per tentare una azione di recupero e
correzione. In entrambe le ipotesi ciò comporterà
danni e perdita di tempo e denaro.
Per esempio, se un guasto alla RAM provocasse
l’alterazione di un’istruzione di un processo in esecuzione, potrebbe verificarsi un blocco di quel processo oppure un’alterazione delle sue azioni, che
potrebbero comportare scritture di dati non validi
su database, trasmissione in rete di informazioni
corrotte e così via (si immaginino le conseguenze
di questo tipo di fenomeni se si verificassero nel sistema contabile di una banca o di un circuito di gestione di carte di credito).
Ancora peggiori sarebbero le conseguenze se
l’istruzione alterata appartenesse a un driver di periferica o a un processo di sistema operativo: si potrebbe avere un’alterazione del file system con perdita di dati salvati (difficile da rilevare se non al
prossimo accesso a quei dati) o un più evidente
crash immediato del sistema.
Per queste ragioni nei computer si cerca di adottare contromisure capaci, entro certi limiti, di rilevare i guasti alla RAM o, meglio ancora, di correggerli
automaticamente quando possibile. Purtroppo tali
contromisure hanno un costo tanto maggiore quanto migliore è l’efficacia della protezione che assicurano. Per questo è prassi usuale adottare i sistemi di protezione più sofisticati in macchine di classe server, nelle quali le conseguenze di errori nella
RAM potrebbero essere addirittura catastrofiche;
all’estremo opposto, nei sistemi laptop e desktop
di larga diffusione si tende a usare la più economica
RAM priva di sistemi di protezione. Nella fascia intermedia, comprendente le workstation professionali e i desktop di fascia alta, le scelte dipendono
dalle esigenze dell’utente.
I moduli di memoria dotati di controllo di parità
sono in grado di eseguire una semplice forma di rilevamento dei guasti. Questi moduli contengono una
piccola quantità di RAM aggiuntiva usata per affiancare a ogni “parola” di memoria (32 bit) un ulteriore
bit, non accessibile dalla CPU ma generato automa-
PC Open 35 www.pcopen.it
1.5.1.5 Capire
l’accezione dei
termini: controllo di
parità e memoria
ECC, il loro
funzionamento e i
motivi alla base del
loro impiego
I moduli ECC, grazie a
una piccola quantità di
memoria aggiuntiva e
ad appositi circuiti di
controllo, sono in grado
di rilevare e correggere
automaticamente guasti
relativi a singoli bit,
aumentando così la
stabilità del PC. Sono
impiegati soprattutto
su macchine di classe
server, in cui le maggiori
esigenze di affidabilità
giustificano il maggior
investimento necessario
per equipaggiarsi con
questo tipo di memoria
IT administrator - Hardware
La RAM
e le sue latenze
I dati in un chip DRAM sono organizzati su
uno o più banchi (spesso 2 o 4) e all’interno
di ciascun banco i dati sono organizzati
logicamente in una matrice rettangolare di
celle, ognuna delle quali contiene un certo
numero di bit (per esempio 8).
Dopo aver attivato un particolare banco
nel chip, per leggere un dato da una sua
cella occorre comunicarne al modulo le
coordinate (“riga” e “colonna”) all’interno
della matrice. Il modulo deve allora
selezionare la riga richiesta, poi la colonna;
può allora avere inizio il trasferimento
dei dati verso la CPU e infine la riga, la
cui lettura ne ha parzialmente scaricato i
bit, deve essere rimessa in condizioni di
sopravvivere fino al prossimo refresh (o fino
alla prossima lettura) senza perdere i dati
che contiene.
Se la prossima lettura avverrà su altre
colonne della stessa riga, essa potrà
iniziare con minore attesa.
Se invece la riga selezionata cambia,
sarà necessario dare ulteriore tempo
all’elettronica del chip DRAM per disattivare
la vecchia riga e attivare quella nuova. La
successione esatta di eventi e ritardi è:
• Viene inviato il comando di selezione del
chip DRAM (Chip Select, CS);
• Ritardo Command Rate: tempo che deve
trascorrere fra il segnale di selezione del
chip e l’inizio dei comandi di selezione/
lettura/scrittura.
• Viene inviato il comando RAS (Row
Address Select) per attivare la riga
desiderata. I successivi comandi si
riferiranno al contenuto di questa riga.
• Ritardo RAS to CAS Delay (tRCD): tempo
minimo che deve trascorrere fra la selezione
1.5.1.6 Essere
informati
sull’ampiezza di
canale - in numero
di bit - relativa a
ciascuna tipologia di
modulo di memoria.
Inoltre comprendere
il concetto di
organizzazione in
banchi
Lezione 3
di riga e la selezione di colonna.
• Viene inviato il comando CAS (Column
Address Select) per selezionare la colonna
all’interno della riga attiva
• Ritardo CAS Latency: tempo necessario
per la selezione della colonna.
• Inizia finalmente la successione di letture
dei dati dalla cella selezionata.
• Viene deselezionata la riga per poter
selezionare un’altra riga.
• Ritardo RAS Precharge (tRP): tempo
che deve trascorrere per l’operazione di
deselezione della riga corrente, onde poter
selezionare un’altra riga.
• Ritardo Row active to precharge (tRAS):
È inoltre necessario che, per piccolo che
sia stato il numero di operazioni di lettura
compiute, prima di poter deselezionare la
riga sia trascorso, dalla sua attivazione,
almeno un tempo pari a tRAS.
Così, per esempio, l’indicazione “2.5-22-5-1T” sta a indicare rispettivamente i
cinque ritardi funzionali (CAS, RAS to CAS,
Row precharge, Row active to Precharge,
Command) che concorrono a formare la
latenza complessiva del modulo, espressi in
cicli di clock.
Più bassi sono questi valori (e la loro
somma) e migliori sono le prestazioni del
modulo. Alcuni di questi valori, in particolare
il valore del CAS, possono essere frazionari
(come in 2.5) poiché le memorie DDRx
effettuano due trasferimenti per ciclo di
clock, o, per così dire, un trasferimento a
ogni …mezzo ciclo di clock.
I cinque ritardi non sono riportati nella loro
successione logica, ma piuttosto in ordine
decrescente d’importanza.
Le letture dalla memoria avvengono
solitamente in sequenza, da celle di
memoria consecutive che molto spesso si
trovano nella stessa riga. La selezione della
riga avviene quindi molto più raramente
ticamente dal modulo, che vale 1 o 0 a seconda che
il numero di bit 1 nella parola sia pari o dispari.
Qualora un numero dispari bit, a causa di uno o
più guasti, dovesse virare da 1 a 0, verrebbe a mancare la coerenza fra il bit di parità e i bit contenuti
nella parola, e l’elettronica di controllo segnalerebbe immediatamente l’errore. Si potrebbe così bloccare l’esecuzione prima che si materializzino conseguenze peggiori.
Purtroppo i sistemi basati sul controllo di parità
non sono in grado di rilevare il verificarsi contemporaneo di un numero pari di errori sui bit e tantomeno sono in grado di correggere gli errori rilevati
(perché è impossibile sapere, in base al solo bit di
parità, quale sia il bit che ha subito un’alterazione
nella parola di memoria). Questa modesta ma pur
sempre utile prestazione preventiva ha il costo di
1 bit di memoria aggiuntiva ogni 32 bit di memoria
dati: un’incidenza del 3% circa.
I moduli ECC (Error Correcting Code) sono invece capaci non soltanto di rilevare, ma anche di correggere gli errori, entro certi limiti ben precisati dal
costruttore. I sistemi più frequentemente utilizzati
sulle memorie ECC usate su macchine di classe x86
sono in grado di rilevare e automaticamente correggere errori singoli, e di rilevare (ma non correggere)
PC Open 36 www.pcopen.it
La comoda utility freeware CPU-Z (www.cpuid.com)
consente di esaminare i parametri di funzionamento dei
moduli di memoria installati sul PC
della selezione di colonna; pertanto i ritardi
connessi con la selezione e attivazione
della riga (RAS, RAS to CAS, etc.) sono
meno rilevanti, ai fini delle prestazioni,
del ritardo CAS, che incide invece su ogni
singola lettura.
È per questo che la latenza CAS, la
più critica, viene riportata per prima (o
addirittura da sola) quando si indicano
le caratteristiche di funzionamento di un
modulo di memoria.
errori doppi; il rilevamento di errori più numerosi
non è garantito.
Queste prestazioni richiedono 4 bit addizionali di
memoria per ogni parola dati di 32 bit (corrispondenti a un “fabbisogno” del 12% circa di memoria in
più) e una veloce elettronica di controllo d’errore
che deve trovare posto sul modulo DIMM insieme
ai chip DRAM.
È chiaro che tutto questo comporta costi di fabbricazione oggettivamente maggiori, il che, tenendo
conto anche delle minori economie di scala e della minor concorrenza nelle memorie per server rispetto a quelle per sistemi di larga diffusione, porta
a prezzi di vendita notevolmente superiori a quelli
delle memorie senza sistemi di protezione.
L’investimento in memoria ECC, e in una motherboard che la supporti, deve quindi essere valutato
in funzione della criticità delle informazioni da proteggere e della criticità della stabilità del sistema.
L’ampiezza di canale, in numero di bit, relativa a
ciascuna tipologia di modulo di memoria
Ogni modulo di memoria può avere una sua particolare organizzazione interna dei chip DRAM, ma è
indispensabile che l’interfaccia esterna abbia caratteristiche di funzionamento compatibili con la mother-
Lezione 3
board e la CPU e soprattutto una larghezza di canale standard.
Come già ricordato, i primi SIMM avevano un canale a 8 bit e ciò obbligava ad installarli
a gruppi di quattro se abbinati a processori 32 bit
come 386 e 486; analogamente, la successiva generazione di SIMM aveva un canale da 32 bit che per
l’uso con i Pentium richiedeva l’installazione a coppie. I DIMM attualmente sul mercato hanno invece
un bus a 64 bit che permette di non installarli necessariamente a coppie. Tuttavia in molte motherboard, per aumentare le prestazioni complessive
del sistema CPU-memoria, è supportata una modalità “dual channel” in cui i moduli DIMM da 64 bit
vengono installati a coppie, in modo tale da raddoppiare la banda fra CPU e memoria: per esempio, si
può far in modo che quest’ultima appaia al memory
controller come se fosse un banco unico di parole
da 128 bit. Si tratta di una intelligente variante del
modo di fare uso della RAM esistente sul mercato e
non di un miglioramento delle prestazioni intrinseche della RAM stessa. Infatti questo schema raddoppia la velocità di trasferimento dati di picco ma non
può ridurre con altrettanta efficacia la latenza.
L’installazione di moduli RAM in un sistema a
doppio canale richiede di rispettare regole di accoppiamento: i moduli vanno installati a coppie, meglio
se di tipo identico (ma non è sempre strettamente
richiesto), e su posizioni ben precise del banco di
slot, solitamente identificate da colori uguali
Da notare, infine, che il concetto di organizzazione a banchi non si applica soltanto fra moduli di
memoria, ma anche all’interno di un modulo, dove
più chip elementari sono organizzati in gruppi più o
meno grandi, e perfino all’interno del singolo chip
DRAM, nel quale le celle, come già accennato, sono
organizzate a matrice e ogni chip contiene una o più
di queste matrici che lavorano contemporaneamente per aumentare la capacità di trasferimento di dati
in parallelo, per adeguare la larghezza di canale all’architettura esterna o per entrambi gli scopi.
Memorie ROM
Distinguere le diverse tipologie di memoria
ROM: PROM, EPROM, EEPROM e relative
caratteristiche.
Le memorie ROM (Read-Only Memory), in senso
IT administrator - Hardware
stretto, sono memorie non volatili destinate a sola
lettura. Il loro campo d’impiego tipico è l’immagazzinamento di informazioni che non devono cambiare: per esempio:
• il programma (firmware) del microcontrollore di
un semplice organizer o di una periferica (fissato una volta per tutte in fabbrica e non aggiornabile),
• il codice del BIOS (che non deve poter essere alterato da un virus),
• gli identificativi univoci di periferica (a volte usati
dal sistema operativo per rilevare il cambiamento di configurazione o per impedire l’installazione
pirata di copie replicate),
• l’indirizzo fisico di una scheda di rete (che non
deve variare, per impedire certi tipi di attacchi
alla sicurezza),
• il codice di un videogioco distribuito sotto forma
di cartuccia,
e così via.
Le ROM hanno una buona velocità di lettura,
enormemente maggiore di quella di una memoria di
massa a sola lettura come un CD-ROM e potenzialmente maggiore anche di quella della DRAM, poiché
una ROM non richiede refresh. Tuttavia il miglioramento tecnologico delle DRAM ha portato a prestazioni elevate colmando questo gap, cosicchè può
risultare vantaggioso ricopiare il contenuto della
ROM sulla DRAM e leggerlo da quest’ultima a maggior velocità. Si tratta del concetto della Shadow
RAM, opzione ancora attivabile in alcuni BIOS per
aumentare le prestazioni.
Oggi le ROM non scrivibili vere e proprie sono
sempre più spesso sostituite da tecnologie più evolute che, pur restando specializzate nell’operazione
di lettura, supportano un certo numero di cancellazioni e riscritture della memoria. La possibilità di
cambiare il contenuto della ROM, seppure per un
numero limitato di volte, torna decisamente utile soprattutto per aggiornare il firmware di periferiche o
dispositivi complessi, in cui è sempre probabile che
emergano dei bug successivamente al rilascio del
prodotto (tipico caso sono i telefoni cellulari, oppure il BIOS dei PC). Se il codice da aggiornare risiedesse su una “vera” ROM, per correggere il bug bisognerebbe rimuovere il chip dal suo socket e installarne
uno nuovo al suo posto, oppure addirittura, in caso
di chip saldato, cambiare l’intera scheda madre. Se
invece il chip è riscrivibile, tutto può essere fatto in
modo enormemente più pratico ed economico.
Le ROM scrivibili più diffuse sono le PROM, le
EPROM e le EEPROM, che differiscono dal punto di
vista del numero, velocità e modalità di scritture o
riscritture ammesse, e sono realizzate con tecnologie diverse.
La variante più restrittiva è la PROM (Programmable ROM), scrivibile una sola volta. La scrittura
avviene applicando al chip, secondo ben precise regole, opportune tensioni elettriche che distruggono dei microfusibili associati ai singoli bit della memoria. Un microfusibile interrotto crea un circuito
permanentemente aperto che la logica di controllo
del chip può interpretare come un bit 0; ai fusibili
lasciati integri si attribuisce il significato opposto
(bit 1). Il risultato è un chip i cui singoli bit, impostati in fabbrica a 1, possono essere permanentemente
scritti (azzerati) una sola volta.
Molto più comode sono le ROM cancellabili e riscrivibili più volte, ossia le EPROM, le EEPROM e le
memorie flash. Queste si basano sul fatto che una
configurazione circuitale opportuna può trasformare i transistor, solitamente impiegati nei circuiti di-
PC Open 37 www.pcopen.it
Alcune mothebroard,
come questa Foxconn,
supportano configurazioni
di memoria “dual
channel” ad alte
prestazioni in cui i
normali moduli DIMM
vanno installati a coppie
1.5.2 ROM
1.5.2.1 Essere
al corrente delle
modalità di
funzionamento
della memoria
ROM, e relative
caratteristiche.
Distinguere le
diverse tipologie di
memoria ROM, quali:
PROM, EPROM,
EEPROM e relative
caratteristiche
IT administrator - Hardware
Lo schema interno di una
CPU dual core di ultima
generazione mette in
evidenza la presenza di
un grosso quantitativo
di cache
1.5.3 Cache
1.5.3.1 Comprendere
l’utilità della memoria
cache.
gitali come interruttori comandati, in vere e proprie
“trappole di carica”, impiegabili per memorizzare
un bit proprio come i condensatori delle DRAM.
Grazie al molto miglior isolamento, in assenza di
alimentazione questi transistor mantengono il loro
stato di carica non per decine di millisecondi come
farebbero le DRAM, ma per decine d’anni. I chip di
memoria EPROM (Erasable Programmable ROM), in
passato usati anche per memorizzare il BIOS delle
motherboard, sfruttavano questo principio. Erano
riconoscibili per la finestrella trasparente che sovrastava il chip e serviva per la cancellazione, che
avveniva esponendoli a luce ultravioletta per alcuni
secondi; per evitare che la componente ultravioletta naturalmente presente nella luce solare potesse
accidentalmente cancellarli, la finestrella veniva coperta con un’etichetta dopo la programmazione.
Questo scomodo sistema di cancellazione è brillantemente risolto dai chip EEPROM (Electrically
Erasable Programmable ROM) in cui si usa invece
un segnale elettrico: con le EEPROM diventa possibile scrivere e leggere una memoria non volatile in
modo esclusivamente elettrico e quindi direttamente sul sito circuitale, sotto il controllo di un apposito
software, senza bisogno di smontarla per trattarla
con attrezzature esterne né di irraggiarla con anacronistiche lampade UV.
La più recente evoluzione delle EEPROM è la flash
memory, un tipo di EEPROM che non permette di
indirizzare singoli bit, ma viene scritto a blocchi,
proprio come un disco fisso. Questa impostazione
obbliga a riscrivere tutti i bit del blocco anche per
cambiarne uno solo, il che accelera il processo naturale di deterioramento dell’isolante che assicura
ai transistor la loro proprietà di mantenere lo stato
per lungo tempo. Ciò evidentemente accorcia la longevità delle flash rispetto alle EEPROM in termini di
numero di cicli di cancellazione sopportabili (che è
comunque dell’ordine del milione di cicli per le flash
memory più recenti). In compenso le flash memory
risultano molto più economiche da fabbricare delle
EEPROM e hanno riscosso uno straordinario successo, come tutti sanno, come memorie di massa
per tutti i tipi di dispositivi digitali. Esistono due tipi
di flash memory, a seconda del tipo di porta logica
usata per implementare una cella da un bit: i chip
NOR e i chip NAND. I chip NAND, i più usati, hanno
migliori prestazioni, maggior densità, minor costo
e maggior durata, ma a differenza dei NOR non si
prestano bene ad accessi non sequenziali. Pertanto,
nelle applicazioni in cui il chip flash deve ospitare
un programma da eseguire direttamente senza trasferirlo prima in RAM, come il BIOS di una motherboard, è necessario usare flash memory basate su
chip NOR. Viceversa, le celebri “chiavette USB” e in
generale le schede flash sono quasi sempre realizzate in tecnologia NAND.
Comprendere l’utilità della memoria cache
La cache memory, più che una tecnologia costruttiva, è uno schema logico in cui un banco relativamente piccolo (da 8Kbytes a qualche megabyte) di
memoria ad altissima velocità lavora fra un dispositivo veloce e una memoria lenta, per colmare in
parte il gap di prestazioni fra le esigenze del primo
e la lentezza intrinseca della seconda e velocizzare
l’interscambio di dati fra essi. Nell’applicazione più
frequente e più importante, la cache lavora fra la
CPU e la memoria RAM. In considerazione di queste esigenze che fanno passare in secondo piano il
costo, la cache memory della CPU è sempre realizzata con la più veloce RAM statica. Da notare che
PC Open 38 www.pcopen.it
Lezione 3
uno schema cache assolutamente analogo
è usato anche per migliorare le prestazioni
delle memorie di massa relativamente lente, come i dischi fissi:
in questo caso, viste
le tempistiche in gioco, per la cache può
essere sufficiente impiegare la più economica DRAM (di solito
8 o 16Mbytes).
Ogniqualvolta la
CPU debba scambiare dati con un dispositivo di
memoria non abbastanza veloce da reggere il ritmo
delle sue richieste si apre un serio problema di degrado delle prestazioni complessive del sistema. È
chiaramente inutile avere una CPU, magari dual core e ad alta frequenza di clock, in grado di elaborare
dati ad altissima velocità, se la RAM di cui è dotato
il sistema non è in grado di fornire i dati al ritmo richiesto. La CPU trascorrerebbe gran parte del suo
tempo ad attendere che la RAM finalmente risponda
(si parla in questo caso di stati d’attesa, ossia cicli
di clock spesi in inattività) e si sprecherebbero quasi completamente le sue potenzialità.
D’altra parte non è tecnicamente possibile produrre a costi accettabili un banco di memoria RAM che
sia abbastanza grande per le esigenze del software
odierno e al tempo stesso abbastanza veloce da non
far aspettare le sempre più veloci CPU.
Entra in gioco quindi uno schema logico in cui una
speciale porzione di memoria piccola ma molto veloce, detta cache memory, viene usata per ospitare
dati a cui si accede spesso o ai quali probabilmente
si accederà presto. Uno speciale circuito, il memory
controller, esamina le richieste di dati emesse dalla
CPU e se trova che i dati necessari si trovano già nella
cache memory li usa per rispondere in un tempo molto più breve di quello che sarebbe stato necessario
attendere se ci si fosse rivolti alla normale RAM.
Se invece i dati non sono presenti nella cache, il
controller li legge dalla RAM, naturalmente con la
lentezza che caratterizza tale operazione, e li carica in ben precise posizioni della cache sostituendo
dati già presenti e ritenuti non più suscettibili di essere nuovamente usati a breve termine.
Per verificare se del valore immagazzinato in una
determinata locazione di memoria esiste copia nella cache memory, è necessario memorizzare in quest’ultima, accanto a ciascun valore, anche l’indirizzo della locazione di memoria RAM da cui il valore
proviene. Nell’ambito delle cache memory questa
informazione viene definita “tag”.
Per verificare se il dato richiesto dalla CPU è presente nella cache è concettualmente necessario esaminare uno per uno i “tag” di tutte le sue locazioni
per verificare se uno di essi corrisponde all’indirizzo del dato richiesto. Per ovvi motivi di prestazioni
tale controllo non viene fatto con una verifica sequenziale, che richiederebbe troppo tempo, ma se
ne incaricano speciali circuiti che svolgono questo
compito in un tempo estremamente ridotto. Di fatto
la cache memory è organizzata come una memoria
il cui contenuto non viene indirizzato specificando
la locazione che interessa leggere, ma fornendo una
parte del contenuto.
Se il valore fornito (il tag) verrà trovato, sarà ritornato il valore ad esso associato (il dato di cui la
cache contiene copia).
Lezione 3
Conoscere le modalità di funzionamento
della memoria cache
Ma come è possibile prevedere con buona accuratezza quali dati saranno riusati dalla CPU o quali
nuovi dati richiederà per la prima volta?
Fortunatamente i programmi non richiedono dati alla RAM da locazioni completamente casuali, ma
hanno comportamenti la cui particolarità può essere sfruttata intelligentemente per migliorare le prestazioni con un modesto costo aggiuntivo.
Gli accessi a memoria dei programmi reali sono
generalmente caratterizzati da due proprietà: la sequenzialità e il probabile riuso di dati a cui si è acceduto di recente.
• Con “sequenzialità” intendiamo che i dati vengono spesso letti da locazioni di memoria con indirizzi consecutivi. Si potrebbe quindi compensare
la lentezza di funzionamento della RAM leggendo in anticipo, seppur lentamente, una quantità
di dati maggiore di quelli momentaneamente richiesti dalla CPU, e parcheggiando questi dati in
una apposita memoria di parcheggio. In sostanza si “scommette” sul fatto che probabilmente
la CPU avrà presto bisogno anche di questi altri
dati, visto che provengono da indirizzi consecutivi. Questa tecnica è detta “prefetching” (caricamento anticipato) dei dati o anche “look ahead”
(sguardo in avanti).
• Se la CPU non richiederà dati ospitati in locazioni
di memoria consecutive, è probabile almeno che
richieda dati già usati di recente. Se mantenessimo “a portata di mano”, in una porzione di memoria relativamente piccola ma molto veloce, i dati
recentemente usati, potremmo rispondere molto
rapidamente alle probabili future richieste della
CPU relative agli stessi dati, poiché non avremmo più bisogno di richiederli alla RAM con la sua
cronica lentezza.
Nei processori moderni, i memory controller che
gestiscono il dialogo fra la CPU e la RAM adottano
entrambe queste tecniche per migliorare le prestazioni del sistema.
L’area di memoria dove questi dati vengono depositati è detta cache memory ed è realizzata con della
velocissima (e costosa) memoria SRAM. Fortunatamente, le citate proprietà statistiche dei programmi sono rispettate così bene che un quantitativo di
cache compreso fra i 512KB e i 2 MB (per ogni core
della CPU) risulta sufficiente a ridurre quasi completamente gli stati d’attesa del processore e gli studi
mostrano che quantità superiori di cache garantirebbero solo un vantaggio marginale, non giustificato dal costo aggiuntivo.
Naturalmente le previsioni del memory controller
non risultano sempre azzeccate, pertanto ogni tanto
si verificano delle richieste di dati non presenti nella cache (cache miss). In questo caso si dovrà provvedere a effettuare delle letture (lente) dalla RAM
per procurare il dato mancante. Se la cache, come
avviene sempre dopo il primo periodo di funziona-
IT administrator - Hardware
mento della macchina, era già satura di dati, si dovrà far posto ai nuovi dati letti scartando qualche
altro dato dalla cache.
Il criterio di scelta su quali dati scartare è naturalmente euristico, dato che è impossibile fare previsioni rigorose. Si tende perciò a scartare il dato
meno recentemente usato, nella speranza (di solito
fondata) che essendo stato così poco usato ultimamente, non sia usato neanche nel prossimo futuro.
Distinguere le diverse tipologie di memoria
cache, e la loro localizzazione
Gli schemi di memoria cache possono essere notevolmente più complessi di quelli qui descritti. In
primo luogo, possono esservi cache dedicate a scopi ben distinti: nei processori, ad esempio, troviamo
spesso due cache separate, una per le istruzioni (Instruction cache o I-Cache) e una per i dati (Data cache
o D-Cache). Questa separazione di ruoli permette di
escogitare ed applicare politiche di previsione dei
prossimi accessi specializzate per la diversa natura
delle informazioni trattate.
Per esempio, certe istruzioni (decisioni, salti)
possono interrompere il normale flusso sequenziale di esecuzione del programma: in questi casi il
memory manager, su “suggerimento” del circuito
di decodifica delle istruzioni, potrebbe rivolgere la
propria attenzione, per il look ahead della sola cache delle istruzioni, a celle non consecutive, migliorando la probabilità di “azzeccare” le proprie previsioni sulle richieste future della CPU e quindi le prestazioni complessive.
In secondo luogo, le cache differiscono per la politica (associatività) con cui fanno corrispondere le
proprie locazioni a quelle della RAM gestita. L’associatività misura il grado di “libertà” con cui una cache può mettere in relazione le celle della RAM con
le proprie: maggiore è questa libertà, più precisa
può essere la scelta delle celle “inutili” da scartare
per far posto ai nuovi dati, e migliori possono essere le prestazioni generali. Le cache più sofisticate e
complesse sono dette completamente associative
(fully associative): in esse qualsiasi locazione della
cache può contenere la copia del dato di una qualsiasi locazione della RAM, secondo necessità. In caso di cache miss, una cache di questo tipo potrà
scartare con estrema accuratezza il dato più vecchio ed evitare con ottima probabilità di doverlo rileggere poco dopo.
Purtroppo in una cache completamente associativa è molto “costoso” determinare se la locazione cercata è presente nella cache oppure no: occorre confrontare l’indirizzo richiesto con l’elenco
completo degli indirizzi “rispecchiati” dalla cache, e
questa operazione richiede o molto tempo o circuiti
piuttosto complessi.
Le implementazioni più semplici e meno accurate, invece, stabiliscono una corrispondenza che a
una determinata locazione della RAM fa corrispondere una e una sola possibile ubicazione nella cache: si parla di cache a corrispondenza diretta (direct mapped). In queste ultime è alta la probabilità
che in caso di cache miss, essendo così rigida la
legge che stabilisce quale cella della cache debba
essere “sacrificata”, si elimini un dato che in realtà non è affatto quello meno usato di recente e che
potrebbe quindi essere nuovamente richiesto poco
dopo. Un compromesso fra questi due casi limite è
quello delle cache parzialmente associative, in cui
una cella RAM può essere gestita da un certo numero di celle (di solito 2 o 4) della cache. In questo
caso si parla di cache con associatività a 2 vie o a
PC Open 39 www.pcopen.it
1.5.3.2 Conoscere
le modalità di
funzionamento della
memoria cache
1.5.3.3 Distinguere
le diverse tipologie di
memoria cache, e la
loro localizzazione
Il controller di memoria
può essere contenuto
nel chipset northbridge
o direttamente nel
processore
IT administrator - Hardware
Lezione 3
In un processore dual
core, ciascun core può
disporre di un proprio
corredo indipendente
di cache L1 e L2
(come nell’Opteron qui
raffigurato). In questo
caso è necessaria
una apposita
circuiteria (crossbar)
che interconnetta
ad altissima velocità
le cache presenti
garantendone la
coerenza, qualora
contengano riferimenti
a uno stesso dato. Nei
processori Intel Core2
Duo la cache L2 è invece
unica e condivisa fra i
due core.
Nei processori AMD
Opteron e Athlon64
ogni core dispone di due
cache L1 specializzate
(una per i dati e l’altra
per le istruzioni) e di una
cache L2 unificata, di
maggiori dimensioni
4 vie (2/4-way associative cache). Questa flessibilità
permette al memory controller di scegliere, di volta
in volta, la cella più vantaggiosa da scartare fra 2 o
4 alternative possibili.
1.5.3.4 Conoscere
le differenze
intercorrenti fra:
cache di primo
livello/L1 e cache di
secondo livello/L2
Differenze tra cache di primo livello/L1
e cache di secondo livello/L2
In terzo luogo, per ottimizzare i costi e per ridurre
il ritardo di risposta, risulta conveniente strutturare la cache a livelli: un primo livello (Level 1 cache,
o Cache L1), che è sempre integrato nel processore,
ha la massima velocità, di solito è di tipo solo parzialmente associativo (per semplificare il circuito e
farlo lavorare a più alta frequenza) ed ha piccole dimensioni (attualmente dell’ordine di 64 Kbytes).
Se il dato non viene trovato nella cache L1, questa
si rivolge non alla RAM, ma a un secondo banco di
cache memory, più lento ma molto più grande (attualmente da 512 KB a 2 MB): è la cache di secondo livello (L2), un tempo esterna alla CPU ma oggi
invariabilmente integrata in essa, a fianco della cache L1.
La cache di secondo livello, grazie alle minori restrizioni di spazio e frequenza di lavoro, ha spesso
una associatività maggiore di quella di primo livello.
In alcuni schemi (soprattutto su macchine server e
su sistemi multiprocessore) esiste anche una cache
di livello 3, con dimensioni e velocità di funzionamento che si avvicinano ulteriormente a quelle della RAM; solitamente la cache di livello 3, di grandi
dimensioni (parecchi megabytes) è esterna al processore per ragioni costruttive.
Questo schema piramidale si rivela vantaggioso,
in termini di costi e prestazioni, rispetto a sistemi di
cache “monolitica”.
Ricordiamo da ultimo che nei sistemi multiprocessore tutte le CPU dispongono di una propria
quantità di cache, ma “vedono” tutte, potenzialmente, la stessa RAM principale.
Questo significa che durante il funzionamento potrà capitare che una stessa locazione di memoria
RAM sia presente contemporaneamente nella cache
di due o più processori.
Questo non sarebbe un problema se fosse garantito che i processori si limitano a leggere dati dalla
cache, ma purtroppo non è così: seppur meno fre-
PC Open 40 www.pcopen.it
quentemente, le varie CPU presenti nel sistema devono anche poter scrivere dei dati.
Se un processore A scrivesse un nuovo dato proprio su una di quelle locazioni che risultano contemporaneamente presenti in due o più cache del
sistema, si verrebbe a creare una situazione potenzialmente molto pericolosa in cui una versione più
aggiornata del dato sarebbe presente nella cache di
uno solo dei processori.
Se a questo punto un altro processore B leggesse quel dato, in assenza di opportuni accorgimenti
quel processore otterrebbe un dato “vecchio”, che
non ha risentito della scrittura appena effettuata dal
processore A.
Questo non sarebbe accaduto in assenza di cache
memory: se tutti i processori leggessero e scrivessero direttamente sulla RAM, le prestazioni sarebbero molto basse, ma non esisterebbe il problema
descritto (coerenza della cache).
Un problema di coerenza della cache si verifica
anche quando un’area di memoria può essere modificata, oltre che dalla CPU, anche direttamente da
una periferica capace di accesso diretto alla memoria (Direct Memory Access o DMA): per esempio
una scheda di rete o il controller del disco. In questo caso potrebbe accadere che una delle locazioni
interessate dalla modifica abbia una vecchia copia
nella cache del processore. È pertanto necessario
avvertire il memory manager affinchè scarti la sua
copia, ormai obsoleta.
Le regole che vengono applicate per far fronte a
questi rischi e garantire che i dati di tutte le cache
siano sempre corretti e aggiornati rispetto alle altre
cache e alla RAM sono dette protocolli di coerenza
della cache (cache coherency protocols); in genere
richiedono un momentaneo arresto, parziale o totale, delle operazioni di cache e CPU, e uno scambio
dati fra le cache o fra cache e memoria.
Da notare che questi problemi non esistono soltanto nelle macchine multiprocessore, ma anche in
un qualsiasi processore dual core o quad core ormai
sempre più comune su desktop e laptop. Ogni core
dispone di una sua cache che deve essere mantenuta coerente con quella degli altri core presenti.
A questo provvede, normalmente, uno speciale memory controller.
Lezione 3
IT administrator - Hardware
Differenze fra le modalità
di scrittura successiva [write back]
e contemporanea [write through] della cache
Un aspetto importante delle cache memory è la
gestione delle scritture. Infatti, la CPU non si limita
a leggere dati, ma (seppur a frequenza inferiore) di
tanto in tanto deve naturalmente anche scriverli.
Quando questo succede, i dati devono essere scritti
innanzitutto sulla cache, per essere pronti a rispondere rapidamente alla CPU qualora questa dovesse
rileggerli poco dopo.
Ma è anche necessario che prima o poi i dati vengano scritti in RAM, anche perché le celle di memoria di cui la cache memory contiene una “copia
veloce” vengono sostituite a rotazione dalle copie
di altre celle di cui il programma farà richiesta nel
corso della sua esecuzione e se ciò accadesse, si rischierebbe di perdere l’unica copia esistente di un
nuovo valore scritto dalla CPU.
Chiarito che il dato nella cache memory non può
attendere a tempo indeterminato di essere trascritto nella RAM vera e propria, si tratta di decidere
quando scriverlo. Indipendentemente dal dominio
applicativo e dalla tecnologia con cui sono realizzate, sono applicabili almeno due modalità di scrittura
principali: la write-back e la write-through.
Nella modalità write-through, in caso di scrittura
di un dato sulla cache, si provvede a scriverlo immediatamente anche sulla RAM. Questa politica di
gestione è semplice ma ovviamente ogni scrittura
richiede tempo, durante il quale il funzionamento
della cache (e di conseguenza la CPU) potrebbero
dover attendere. In sostanza, una cache write-through accelera notevolmente il funzionamento rispetto
a una semplice RAM nelle letture ma poco o per nulla nelle scritture.
La modalità write-back prevede invece di non scrivere i dati in RAM immediatamente, ma soltanto
quando la cella non ancora salvata dovrà essere
sostituita per far posto a un nuovo dato. Questo significa che tutte le scritture vengono ritardate il più
possibile e che la cache tenderà ad avere sempre
un numero significativo di dati ancora da scaricare
in RAM. Una strategia alternativa è quella di lasciar
accumulare un certo numero di scritture di dati e
di eseguirle poi insieme, in modo differito, ove si
presentasse l’opportunità di farlo in modo più efficiente (per esempio con un’istruzione di scrittura multipla, se si trattasse di locazioni di memoria
contigue).
Nel caso della cache applicata ai dischi fissi, la
modalità write-through è la più sicura, in quanto in
un eventuale black out si perderebbe al massimo
una singola scrittura in attesa. Non così in una cache write-back, che in un dato istante può essere anche completamente piena di dati non ancora scritti
sul disco: questi verrebbero tutti persi se mancasse
l’alimentazione abbastanza a lungo da interrompere
il funzionamento del sistema.
Conoscere i principi di funzionamento
della cache del disco rigido
Osserviamo anche che una forma di cache memory con principio di funzionamento assolutamente analogo a quello della cache fra CPU e RAM è usata anche per migliorare le prestazioni dei dei dischi
fissi. Innanzitutto esiste una cache hardware dedicata ai dischi che trova posto direttamente a bordo degli stessi drive, sulla scheda dell’elettronica
di controllo.
Qui sono installati solitamente 8 o 16 MB di memoria RAM destinati a contenere il look-ahead buf-
1.5.3.5 Conoscere
le differenze fra
le modalità di
scrittura successiva
[write back] e
contemporanea
[write through] della
cache.
fer. Per come è costruita la meccanica del disco, infatti, quando viene servita una richiesta di lettura
riferita a un particolare blocco è del tutto naturale
leggere anche un certo numero di settori e cluster
successivi a quello richiesto.
Questi blocchi potrebbero servire a breve, se si
sta effettuando una lettura sequenziale di un file (è
il caso più comune); pertanto il drive li tiene da parte e se saranno richiesti potrà rispondere in pochi
microsecondi (il tempo di leggere la RAM del buffer)
anziché in parecchi millisecondi (il tempo medio
d’accesso al disco), con un fattore di accelerazione
pari a quasi 1000.
La stessa area di memoria torna utile anche in
caso di scrittura sul disco. I dati da scrivere arrivano al disco a velocità molto elevata, sul cavo piatto
Parallel ATA (IDE) o sul cavo seriale Serial ATA. La
velocità a cui è possibile scriverli fisicamente sul disco è però molto inferiore. Quello che si fa è quindi
accettare la richiesta (per liberare appena possibile il controller del disco e la CPU) salvando i dati da
scrivere nel buffer.
Appena la testina e il disco avranno raggiunto la
posizione giusta per iniziare la scrittura, i dati saranno recuperati e scritti effettivamente sulla superficie
magnetica. È chiaro che questa tecnica aumenta notevolmente le prestazioni in scrittura, ma non se ne
deve abusare, visto che i dati parcheggiati sul buffer dell’hard disk sarebbero persi se si verificasse un
black out prima che sia stato possibile scriverli.
La cache hardware non è l’unica possibilità per
aumentare le prestazioni del disco in lettura e scrittura. La cache memory, infatti, non deve necessariamente essere un banco di memoria fisica: anche
Windows e Linux mantengono, in una apposita regione della RAM di sistema, una cache memory “logica” di parecchi Megabytes per accelerare gli accessi al disco. Data l’ampia disponibilità di memoria
di sistema, non è infatti saggio integrare troppa cache memory fisica sul disco, ma risulta conveniente
coadiuvarla impiegando parte della RAM di sistema
momentaneamente inutilizzata.
Una soluzione intermedia fra l’integrazione di cache memory sull’hard disk e l’impiego di memoria
di sistema da parte del Sistema Operativo è quella
adottata da alcune schede controller per hard disk
ad alte prestazioni (per esempio Adaptec 2200S) in
cui è il controller stesso a essere provvisto di un
proprio banco di RAM usata per la cache dei dischi
collegati. Soprattutto se il controller gestisce autonomamente un array di dischi RAID fatti lavorare in
modo “cooperativo”, la centralizzazione della cache
può essere molto vantaggiosa e riduce la necessità,
per il sistema operativo, di sacrificare parte della
memoria principale a questo scopo.
PC Open 41 www.pcopen.it
Alcuni controller per
dischi ad alte prestazioni
incorporano una
certa quantità di RAM
impiegata come cache
locale. Spesso è anche
possibile installare
RAM supplementare
direttamente sul
controller per
incrementarne le
prestazioni.
1.5.3.6 Conoscere
i principi di
funzionamento della
cache del disco
rigido.
IT administrator - Hardware
Materiale didattico
progettato per EUCIP
IT Administrator
segnalato da AICA
Modulo 1 - Hardware
“AICA, Licenziataria
esclusiva in Italia
del programma
EUCIP (European
Certification
of Informatics
Professionals)
riconosce che il
materiale didattico
segnalato è
strutturato in
modo coerente con
l’organizzazione dei
contenuti prevista
dai documenti
EUCIP di riferimento.
Di conseguenza
AICA autorizza sul
presente materiale
didattico l’uso
dei marchi EUCIP
(registrato dal
CEPIS Concil
of European
Professional
Informatics
Societies) ed AICA
protetti dalle leggi
vigenti.”
1.6 Bus
1.6.1 Struttura e
larghezza di banda
1.6.1.1 Sapere
cos’è il bus e le
relative modalità di
funzionamento
A scuola con PC Open
Tre tipi di bus per dati,
indirizzi e controllo
In questa quarta puntata passiamo ad analizzare
tutto ciò che riguarda le interconnessioni tra i diversi
componenti. Bus e risorse di sistema di Marco Mussini
l bus è la via di comunicazione fondamentale della motherboard che collega con un canale ad alta
capacità la CPU alle periferiche principali, come il
controller della memoria, la scheda grafica, il controller dei dischi fissi.
Per comprenderne la struttura logica e il principio
di funzionamento, rispetto ad altre soluzioni possibili,
dobbiamo considerare che l’interconnessione fra un
gruppo di dispositivi, uno dei quali debba eventualmente svolgere un ruolo di coordinatore e regolatore
(master) del processo di comunicazione, si avvale di
una infrastruttura fisica che può presentarsi in varie
strutture logiche, o “topologie”, diverse.
• (Figura 1) Un primo esempio è quello della connessione “a stella”, in cui tutte le unità periferiche
sono collegate direttamente al “centro” e non sono
collegate fra loro. Ogni unità dispone di un suo canale diretto, con una banda riservata a sé e sempre
pienamente disponibile. Far comunicare fra loro due
periferiche direttamente, con questa struttura, non è
possibile: è invece necessario passare dal “centro”,
impegnandolo inutilmente solo per ottenere il transito e il corretto instradamento dei messaggi. Questa
struttura massimizza la banda fra ogni periferica e
la CPU ma è inefficiente per le comunicazioni dirette
fra periferiche; inoltre comporta una moltiplicazione delle connessioni fisiche e della complessità circuitale, specie dal punto di vista del “centro”, su cui
convergono numerosi canali, a tutti i quali deve essere dato ascolto contemporaneamente. Una variante
I
Calendario delle lezioni
Nella Figura 2
daisy chain, per la
comunicazione fra il PC
e una periferica della
catena è richiesta la
collaborazione delle
periferiche attraversate
dal flusso di dati. In
compenso è teoricamente
possibile che due
periferiche comunichino
fra di loro senza
richiedere l’intervento
del PC
Lezione 4
Lez 1: la scheda madre e il BIOS
Lez 2: i processori
Lez 3: la RAM
Lez 4: bus e risorse di sistema
Lez 5: interfacce
Lez 6: memorie di massa
Lez 7: i monitor e le schede grafiche
Lez 8: le stampanti
Lez 9: hardware di rete
In collaborazione con
Lez 10: alimentatori
e installazione nuovo
hardware
Lez 11: risoluzione dei
problemi
PC Open 42 www.pcopen.it
PDF DEL CORSO
NEL DVD
1
Nella topologia “a stella”, ogni
periferica è collegata direttamente
al centro. Il canale di comunicazione
PC-periferica è diretto, ma un
trasferimento dati fra due periferiche
attraversa il PC e lo coinvolge
nell’operazione
di questo schema è quella in cui anche le periferiche
sono collegate fra loro, in modo completo, o “magliato”, o solo fra coppie adiacenti; la complessità circuitale aumenta in modo considerevole, per cui l’adozione di un simile schema deve avvenire soltanto se
giustificata da esigenze reali.
• (Figura 2) Un secondo schema è quello della connessione “a catena” (daisy chain), con struttura simile a quella di un treno: l’unità master corrisponde
alla motrice; le periferiche corrispondono ai vagoni
del convoglio; per raggiungere un vagone partendo
dalla motrice è necessario attraversare i vagoni precedenti. Nel caso della comunicazione dati, questo
significa che il principale fattore limitante di questo
schema è la banda fra la “motrice” e il primo “vagone”, in quanto tutto il traffico deve necessariamente
transitare da quel tratto. Inoltre ogni elemento della
catena deve essere in grado di fungere da “ripetitore” per i segnali che sono solo in transito perché destinati ad altre unità lungo la catena.
2
Lezione 4
IT administrator - Hardware
3
4
Nella topologia a “bus”, l’infrastruttura di comunicazione è
condivisa da tutte le periferiche e dal master, che in un PC è
di solito il south bridge. Quando offre la prestazione di “bus
mastering”, il bus consente anche a una periferica di assumere
temporaneamente il ruolo di master; pertanto, a seconda delle
implementazioni, oltre alla normale comunicazione CPU-periferica
comandata dalla CPU (linea rossa) può diventare possibile anche
la comunicazione periferica-CPU intrapresa su iniziativa della
periferica stessa (linea blu) e la comunicazione fra due periferiche
senza coinvolgimento della CPU (linea verde)
• (Figura 3) Uno schema che costituisce un buon
compromesso fra prestazioni e semplicità costruttiva, sia per le periferiche sia per l’unità master, è
quella del bus. Per comprenderne il funzionamento si pensi a un unico “corridoio” (corrispondente
al bus) su cui si affacciano varie stanze (corrispondenti alle periferiche e all’unità master). Il corridoio
può essere impegnato da una sola persona alla volta per recarsi da una stanza all’altra. Se vi è già qualcuno occorrerà attendere che arrivi a destinazione
prima di accedere a propria volta al corridoio. In
questo schema circuitale la comunicazione può avvenire soltanto fra una coppia di unità alla volta. In
compenso, non è necessario che una delle due unità in comunicazione sia quella master: risulta infatti
possibile far comunicare fra loro due periferiche in
modo diretto e alla massima velocità permessa dal
bus, senza impegnare il “centro” (questa possibilità
è detta bus mastering). La banda complessivamente
disponibile è di fatto contesa fra le periferiche, che
devono utilizzarla alternativamente: l’effetto macroscopico è una condivisione della banda, come nello
schema “daisy chain”. Rispetto alla topologia a catena, però, un bus non richiede alle unità partecipanti
di lasciarsi attraversare da eventuali segnali in transito verso altre unità, né, quindi, di svolgere un ruolo di ripetitori attivi di segnale: a livello costruttivo
ciò comporta una notevole semplificazione. A causa
della mancanza di ripetitori, però, un bus non può
avere dimensioni fisiche eccessivamente grandi, né
accogliere un numero eccessivo di periferiche, pena l’attenuazione dei segnali e un decadimento di
prestazioni.
In considerazione delle particolarità di questi
schemi di connessione, risulta ora comprensibile il
fatto che:
• gli schemi di connessione “a stella” sono normalmente usati nelle reti aziendali nelle quali è ragionevole installare un cablaggio dedicato fra ciascuna
postazione e il router/switch di reparto;
• schemi “daisy chain”, i cui nodi hanno la capacità di funzionare da ripetitori, sono spesso usati per
il collegamento di periferiche esterne (es. FireWire)
il cui numero può diventare anche elevato e le cui
connessioni potrebbero dover coprire distanze non
trascurabili (anche diversi metri)
• il bus, invece, è lo schema di elezione sulle
motherboard, in cui il numero di periferiche da interconnettere è basso (di solito non più di 5 o 6), sono richieste alte prestazioni ed è utile la possibilità
che una periferica parli direttamente con un’altra
(“bus mastering”) senza impegnare la CPU.
Chiarito che il bus è la struttura di comunicazione idonea per le esigenze di interconnessione ad al-
ta velocità sulla motherboard fra CPU e periferiche
principali, vediamone ora in maggior dettaglio la
struttura e la modalità di funzionamento.
Conoscere la struttura del bus ed i suoi
componenti
Poiché il bus è l’unica connessione esistente fra
master e periferiche, ogni informazione necessaria
per supportare e regolare il dialogo fra queste entità
deve essere comunicata sul bus stesso, insieme ai
dati oggetto della comunicazione. Per questo il bus
è organizzato in tre “parti” logiche, con scopi e modalità di funzionamento ben distinti (figura 4):
Il bus di controllo, o control bus;
Il bus degli indirizzi, o address bus;
Il bus dati vero e proprio, o data bus.
Conoscere le modalità di funzionamento dei
componenti del bus
Per chiarire il ruolo di questi tre “bus elementari”
nella comunicazione fra master e periferiche, si consideri un singolo trasferimento dati effettuato su un
bus. L’esigenza di effettuare un trasferimento dati può
sorgere essenzialmente per due ragioni:
1 Perché lo richiede il sistema operativo oppure
qualche algoritmo di uno degli applicativi in esecuzione. Ad esempio, se un programma deve disegnare sul video, deve inviare dati alla scheda grafica. Se l’utente ha richiesto di salvare il proprio
lavoro, il sistema operativo, per conto dell’applicazione software, deve inviare i dati al controller
del disco fisso per aggiornare il file.
2 Perché in una periferica sono improvvisamente
diventati disponibili dei dati (o richiesti in precedenza o inattesi) per un programma o per il sistema operativo. Ad esempio, se la scheda di rete
ha ricevuto dei dati da Internet, è necessario trasferirli in memoria centrale perché il programma
pertinente li elabori. Lo stesso accade se si era in
attesa di una lettura dati da CD-ROM e i dati sono
finalmente pervenuti. In questo caso la periferica può fungere da master e trasferire i dati di sua
iniziativa, oppure può informare il sistema operativo, con un breve messaggio (un interrupt, di cui
parleremo fra breve), che i dati sono disponibili e
poi attendere che sia il sistema operativo a prelevarli appena possibile.
Poiché, come si è detto, il bus può essere impegnato da un solo trasferimento alla volta, chi intende
trasmettere un dato a una periferica per prima cosa
deve attendere, se necessario, che il bus si liberi e
PC Open 43 www.pcopen.it
Fig. 4: Particolare di un
trasferimento in atto sul
bus. Le informazioni da
trasferire (ossia il “che
cosa”) viaggiano sul
Data Bus. Il Control Bus
stabilisce “come” debba
avvenire il trasferimento
(per esempio: lettura
o scrittura), mentre
l’Address Bus stabilisce
“dove” sono destinati
i dati (ossia: a quale
periferica e a quale
indirizzo di memoria)
1.6.1.2 Conoscere la
struttura del bus ed i
suoi componenti: bus
indirizzi, bus dati,
bus di controllo.
1.6.1.3 Conoscere
le modalità di
funzionamento di:
bus indirizzi, bus dati
e bus di controllo.
IT administrator - Hardware
Fig. 5: Quasi tutte le
periferiche fondamentali
di un PC, inclusa gran
parte di quelle integrate
sulla motherboard
(tastiera, porte seriali
e parallele, porte USB,
scheda di rete, audio
integrato, controller IDE..)
sono gestite attraverso
un proprio intervallo di
indirizzi di I/O. Alcune
usano invece uno schema
di gestione memorymapped anziché I/Omapped e altre ancora
usano entrambe le
tecniche. Poiché lo spazio
I/O è ampio soltanto
64K (indirizzi da 0000
a FFFF esadecimale)
e le periferiche che
competono per
accaparrarselo sono
numerose, si verifica
facilmente una situazione
di “affollamento”, come
si può notare dalla
figura, in cui peraltro
è rappresentata solo
una piccola parte delle
periferiche I/O mapped di
un generico sistema PC
Lezione 4
poi “acquisirlo” per il tempo necessario a effettuare
l’operazione. Questo si fa avvisando tutte le periferiche connesse al bus che la risorsa sta per essere impegnata: la segnalazione consiste nell’attivazione di
un segnale elettrico su una linea facente parte di una
porzione del bus spesso definita bus di controllo poiché non serve direttamente a trasferire dati, ma piuttosto a governare il processo di trasferimento dati,
che avviene sulle rimanenti linee del bus. Il processo
di attesa e acquisizione del bus, in competizione con
altri aspiranti utilizzatori del bus stesso, è detto arbitraggio del bus. Per evitare che il protrarsi della fase
di arbitraggio dia luogo a tempi morti in cui non può
avvenire alcun trasferimento, su alcuni bus come il
PCI l’arbitraggio relativo alla prossima transazione
può avvenire mentre è ancora in corso il trasferimento dati della transazione precedente.
Una volta acquisito, o per così dire “prenotato”,
il bus per l’operazione, è necessario che il mittente (di solito la CPU, ma non sempre) annunci il tipo
di operazione. In questo esempio stiamo ipotizzando che si tratti di una trasmissione di dati destinati
a una periferica, in altre parole una scrittura di I/O
(Input/Output), ma naturalmente esiste anche il caso opposto, quello cioè in cui il master chiede alla
periferica di fornire dati e non di riceverne (si chiede cioè una lettura di I/O); accanto alle operazioni di
lettura/scrittura di I/O esistono infine le operazioni
di lettura/scrittura in memoria, il che dà luogo complessivamente a quattro tipi fondamentali di operazione sul bus e la scelta deve essere effettuata prima
di iniziare la transazione. Anche questa segnalazione
viene effettuata sul bus di controllo, inviando segnali
elettrici su apposite linee del bus di controllo.
Una volta acquisito il bus e specificato il tipo
d’operazione che intende fare, il master deve indicare dove sono destinati (indirizzati) i dati che si accinge a trasmettere.
Così come i segnali di controllo del bus e quelli
di selezione del tipo di operazione viaggiano su una
porzione specializzata del bus, detta bus di controllo,
così l’indicazione della destinazione dei dati avviene
trasmettendo un’apposita informazione (indirizzo)
in un’altra sezione specializzata, detta bus indirizzi
o address bus.
In analogia con l’indirizzo di una lettera, in cui accanto a indicazioni precise come nome del destinatario, via e numero civico compaiono anche indicazioni macroscopiche come città, provincia e Paese,
5
PC Open 44 www.pcopen.it
anche in questo caso l’indirizzo annunciato sull’address bus può essere concettualmente visto come
composto da due parti:
• una prima parte che consente di capire a quale
periferica siano destinati i dati (device select);
• una seconda parte che permette un indirizzamento più fine nell’ambito della periferica destinataria.
Quando un indirizzo appare sull’address bus, le
periferiche installate sul bus lo esaminano per chiarire se la transazione che sta per avvenire le riguarda oppure no.
A tal fine ogni periferica deve conoscere i limiti
della propria “giurisdizione”, stabiliti da un identificativo di periferica oppure da un intervallo di indirizzi di competenza (figura 5). Quest’ultima impostazione, in passato, si effettuava in fase d’installazione
hardware agendo su appositi ponticelli sulla scheda. Naturalmente, con questo sistema, si rischiava
di creare per errore conflitti e omonimie fra periferiche diverse, che avrebbero compromesso il regolare funzionamento del sistema. Al contrario, con bus
più recenti e perfezionati, come il PCI e l’associata
tecnologia Plug and Play, l’impostazione viene assegnata automaticamente, all’accensione, dai circuiti
di controllo del bus che garantiscono così l’assenza di conflitti.
Come accennato, ogni periferica tiene sorvegliate
le linee del bus indirizzi per sapere quando sta per
verificarsi qualche transazione che la riguarda (a seconda del tipo di bus, questo accade quando sulle
linee del bus di controllo appare il suo identificativo
oppure un indirizzo che cade nella regione da essa
gestita). Così, quando viene il momento, la periferica che il mittente ha indicato come destinataria reagisce “attivandosi” e preparandosi a ricevere dati.
Tutte le altre periferiche, invece, ora sanno di non
essere coinvolte, così da questo momento fino alla
fine della transazione entreranno in una fase di attesa, senza interferire.
La seconda informazione fondamentale presente
nell’indirizzo comunicato sull’address bus è l’indirizzo al quale sono destinati i dati nell’ambito della
“regione” gestita dalla periferica. Una periferica infatti di solito presiede una porzione più o meno grande dello spazio logico indirizzabile nella macchina;
a tale porzione spesso corrisponde un proprio spazio fisico destinato ad accogliere i dati in arrivo, ed
è necessario specificare in quale punto di tale spazio debbano essere depositati i dati. Di solito questo spazio fisico consiste in una porzione di memoria RAM, fisicamente installata sulla periferica, con
ruolo di area parcheggio, altrimenti detta memoria
tampone o buffer: specificare la posizione di destinazione dei dati nel buffer significa comunicare un indirizzo di questa area di memoria, che si esprime ovviamente con un numero. Da un punto di vista logico
il buffer può essere visto come un’area dello spazio
di indirizzamento generale della macchina, al pari
della RAM di sistema; in questo caso (memory-mapped I/O) il suo indirizzo è a 16, 32 o 64 bit, a seconda
del tipo di bus. Su altri sistemi il buffer è indirizzato
in uno spazio separato, dedicato alle operazioni di
I/O (port-mapped I/O)
Finalmente, con il bus acquisito, la destinazione
attivata e pronta a ricevere dati e dopo aver comunicato l’indirizzo, è possibile iniziare il trasferimento
dati, che avviene sulla terza e ultima porzione logica delle linee circuitali costituenti il bus: il bus dati.
Tipicamente il bus dati conta su più linee parallele,
con un’ampiezza più o meno grande che in passato,
con l’evoluzione delle architetture hardware, è anda-
Lezione 4
IT administrator - Hardware
6
bile affrontare senza particolari problemi un aumento della frequenza di lavoro dei circuiti coinvolti nel
funzionamento del bus. Per questo, ultimamente, si
sta affermando una tendenza alternativa: quella di
realizzare dei bus “seriali” anziché “paralleli”, con
un’ampiezza di canale anche di 1 solo bit; la relativa
linea opera però ad elevatissima frequenza, e questo
può bastare a compensare la minor ampiezza del canale dati rispetto ai classici bus paralleli a 32 o 64 bit.
Questo è l’approccio adottato dal bus PCI-Express, il
quale, nella versione base (1x) è un bus seriale a 1 bit
che risulta però, da solo, più veloce di un normale
bus PCI parallelo a 32 bit (figura 8). Per incrementare
ulteriormente le prestazioni, anche del PCI-Express
esistono versioni che aggregano più piste (4, 8 o 16):
non si tratta però, a rigore, di un ritorno al concetto
di bus parallelo, in quanto tali versioni consistono di
fatto in un certo insieme di bus indipendenti e non
semplicemente di un bus più “largo” (Figura 6).
7
Il ruolo dell’ampiezza di banda passante sul bus
indirizzi e bus dati
ta via via aumentando: da 8 bit nei primi personal e
home computer si è passati progressivamente a 16
(AT Bus), 32 bit (VL-Bus, AGP, PCI) e 64 bit (PCI-X).
Questa strategia ha permesso di aumentare proporzionalmente le prestazioni, in quanto a ogni ciclo di
clock possono essere trasferiti simultaneamente 8,
16, 32 o 64 bit anziché uno solo (figura 7), tuttavia
vi è un effetto collaterale svantaggioso: aumentano
in modo esattamente proporzionale il numero delle linee circuitali sulla motherboard e il numero dei
contatti (pin) dei connettori del bus, che diventano sempre più ingombranti, costosi e complessi da
realizzare.
Un primo espediente per ovviare a questo problema è quello di utilizzare le stesse linee e gli stessi pin alternativamente come bus dati e come bus
indirizzi. Questo riduce leggermente le prestazioni
del bus, in quanto quando si trasmette un indirizzo
evidentemente si deve interrompere per un istante il
trasferimento dati, ma consente quasi di dimezzare
il numero di contatti e piste circuitali.
Inoltre, il progresso tecnologico rende oggi possi-
8
In che modo le caratteristiche del bus concorrono
a determinarne le prestazioni?
Il singolo parametro più importante per caratterizzare le prestazioni di un bus è la quantità di dati che
è possibile trasferire per ogni unità di tempo. Questa quantità dipende da due grandezze: il numero di
trasferimenti al secondo e l’ampiezza di ciascun trasferimento, che a sua volta è legata all’ampiezza del
data bus. Per esempio, un bus come la versione base
del PCI, che ha un’ampiezza di 32 bit e una frequenza
di lavoro di 33 MHz, effettua un trasferimento per ciclo di clock e movimenta 4 byte ad ogni trasferimento. La banda è quindi pari a 4x33=132 Mbyte/s. Per
contro, un bus PCI-Express 1x lavora alla frequenza
di 2.5GHz e movimenta un singolo bit ad ogni trasferimento: se ogni byte richiedesse 8 bit, la velocità sarebbe quindi di 2500/8=312.5Mbytes/secondo.
Tuttavia, per garantire una buona affidabilità a questa frequenza di lavoro i dati sono codificati in modo
tale che un byte (8 bit) in realtà viene trasmesso su
10 bit, “sprecando” 2 bit su 10. Pertanto la velocità
effettiva si riduce a “soli” 2500/10=250 Mbyte/s.
Una tecnica nota come double data rate (DDR) e
comunemente usata nell’interfaccia fra memory controller e i più recenti tipi di moduli di memoria RAM,
consente di effettuare non uno, ma due trasferimenti
per ciclo di clock: l’effetto è quello di raddoppiare la
banda senza raddoppiare né la frequenza di lavoro
né l’ampiezza del data bus.
Il bus indirizzi e la sua ampiezza hanno solo parzialmente a che fare con le prestazioni di un bus, ma
determinano lo spazio di I/O indirizzabile o la quantità di memoria indirizzabile. Nel passaggio da sistemi con indirizzamento a 32 bit a quelli con indirizzi a
64 bit tale ampiezza diventa circa 4 miliardi di volte
maggiore, permettendo di progettare sistemi nettamente più potenti e adatti a manovrare agevolmente
enormi quantità di dati.
È piuttosto la modalità di funzionamento del bus
indirizzi a poter avere un effetto negativo sulle prestazioni del bus. Come già accennato, nel bus PCI,
per ridurre costi e ingombri, i bus indirizzi e dati
condividono gli stessi contatti sul connettore. Di
conseguenza, indirizzi e dati devono essere inviati
alternativamente sulle stesse linee. Questo ha l’effetto di “rubare” una quota dei di cicli di clock, in cui
potrebbero avvenire trasferimenti dati, per inviare
invece indirizzi. Quanto più spesso questo avviene,
tanto più si ridurranno le prestazioni. Lo stesso avviene nel bus PCI-Express, in cui su un’unica linea a 1
PC Open 45 www.pcopen.it
Fig. 6: Per aumentare
le prestazioni, un
bus parallelo si
affida alla larghezza
di canale piuttosto
che alla frequenza di
lavoro. Nell’esempio
si suppone di dover
trasferire 16 bit dalla
CPU a una periferica.
Se il bus è largo 4 bit,
a ogni ciclo di clock è
possibile trasferire 4
bit di informazione. Per
trasferire tutti e 16 i bit
sarà quindi sufficiente
attendere 16/4=4 cicli
di clock. Un classico bus
PCI è ampio in realtà 32
bit e lavora a 33 MHz,
pertanto raggiunge 1.056
Mbps (32x33)
1.6.1.4 Sapere in
che modo l’ampiezza
di banda passante
influenzi il bus
indirizzi
1.6.1.5 Sapere in
che modo l’ampiezza
di banda passante
influenzi il bus dati
Fig. 7: La strategia
di un bus seriale è
opposta a quella di un
bus parallelo: anziché
costruire un canale largo,
ci si accontenta di un
canale stretto che però i
dati percorrono a velocità
molto maggiore.
Fig. 8: Anche nelle più
moderne motherboard
per PC sono spesso
presenti vari tipi di
connettori, per consentire
il reimpiego di periferiche
di non recentissima
concezione. In questa
Foxconn 975X7AB, si
vedono affiancati slot di
diverse generazioni (da
sinistra a destra: 2 PCI,
1 PCIe x16, 1 PCIe x1, 1
PCIe x16, 1 PCIe x1). Da
un loro confronto visivo
risultano subito evidenti
il risparmio di spazio
e la semplificazione
circuitale che il bus
seriale PCIe x1 ha
consentito dopo l’epoca
dei bus paralleli di cui
il PCI è stato, in tempi
recenti, il più diffuso
rappresentante. Per
aumentare le prestazioni
del PCIe x1, si è fatto
ricorso all’aggregazione
di più linee PCIe seriali
indipendenti. Il connettore
PCIe x16 è il risultato
dell’aggregazione di 16
canali di questo tipo, con
un aumento proporzionale
delle prestazioni, ma
la contropartita è un
ritorno alle dimensioni
tipiche degli slot per bus
paralleli.
IT administrator - Hardware
1.6.2.2 Sapere
cos’è il bus di I/O e
relative modalità di
funzionamento
1.6.2 Differenti tipi
di bus
1.6.2.1 Essere
al corrente
dell’accezione dei
termini: Front Side
Bus e Back Side Bus
bit devono viaggiare segnali per dati, indirizzi e controllo (incluse le segnalazioni di interrupt), riducendo la banda disponibile rispetto ai massimi teorici.
Si deve però tener conto che un bus spende la maggior parte del suo tempo nel trasferimento di grossi
blocchi di dati disposti sequenzialmente a partire da
un determinato indirizzo. In questo scenario, è sufficiente fornire un singolo indirizzo – l’indirizzo di
partenza – e poi mandare semplicemente i dati, che
possono essere anche migliaia o decine di migliaia
nel caso della ricezione di un pacchetto dalla rete
o in quello della lettura di un blocco da disco; una
volta noto l’indirizzo di base, la periferica ricevente
sa già determinare automaticamente, in modo incrementale, gli indirizzi ai quali depositare i successivi
dati in arrivo. Risulta quindi chiaro che il trasferimento di un indirizzo è un’operazione molto meno
frequente di quella del trasferimento di un dato, ed
appare quindi minimo il degrado di prestazioni dovuto al fatto che gli indirizzi “competono” con i dati
per l’utilizzo delle linee del bus.
Differenti tipi di bus
Il traffico che la CPU scambia con il resto del sistema, ossia con la memoria, con le periferiche ad alta
velocità (come dischi o schede grafiche) e con quelle
a medio-bassa velocità (come porte USB e FireWire,
porte seriali e parallele, tastiere e mouse), transita
da un canale primario bidirezionale ad alta velocità
denominato bus frontale o FSB (Front-Side Bus).
L’FSB collega la CPU al chip (il cui ruolo è spesso
chiamato North Bridge) che controlla direttamente
la memoria e le periferiche ad alta velocità, oltre a
fornire un collegamento in cascata verso un secondo chip (South Bridge) incaricato di gestire i bus e le
periferiche a velocità inferiore.
Nelle CPU attuali il Front-Side Bus ha caratteristiche di funzionamento (frequenza di lavoro e larghezza di canale) tali da assicurare una banda abbondante e soprattutto sufficiente per sfruttare al massimo
le potenzialità della memoria. Per esempio, la gamma Core2 Duo di Intel ha un FSB a 1.066 MHz. Nei sistemi multiprocessore, dall’FSB devono transitare
anche i dati scambiati fra una CPU e l’altra, pertanto la sua capacità può diventare un collo di bottiglia
critico dell’architettura. Anche per questa ragione,
nei processori AMD Opteron e nei recenti Athlon con
supporto AMD Quad FX, anziché un FSB unico verso
il North Bridge, vi sono due diversi tipi di canale: un
canale diretto dedicato alla memoria (il controller
della memoria è integrato nel processore, con il vantaggio di parlare con la CPU a velocità ancor maggiore di quella possibile con un FSB), più un certo numero di connessioni separate, punto-punto, ad alta velocità, basate sulla tecnologia HyperTransport, per
costruire configurazioni multiCPU.
Nei casi in cui si può parlare di FSB è tipico che
questo bus funzioni a una frequenza inferiore rispetto a quella alla quale lavora internamente la CPU. La
frequenza interna e quella esterna sono quindi legate da un “coefficiente moltiplicatore” che spesso può
essere impostato da BIOS.
In alcuni casi relativamente rari, come il processore Pentium Pro lanciato nel 1995, la CPU prevede un canale specifico, ancora più veloce dell’FSB,
per collegare un banco di cache memory esterno
rispetto al chip principale della CPU. Per assicurare
le massime prestazioni, questo specialissimo canale, denominato Back-side Bus per contrapposizione
con FSB, lavora a una frequenza uguale a quella del
core ed ha ovviamente requisiti molto stringenti in
termini di distanza massima raggiungibile. Nel Pen-
PC Open 46 www.pcopen.it
Lezione 4
tium Pro, il BSB copriva una distanza di pochi millimetri e la cache memory da esso collegata al processore si trovava dentro lo stesso involucro della
CPU, semplicemente su un chip di silicio separato
da quello principale.
Sapere cos’è il bus di I/O e relative modalità
di funzionamento
Se l’FSB è un particolare tipo bus ad alta velocità, che connette fra loro due sole entità spesso progettate dalla stessa Casa produttrice (CPU e North
Bridge chip), i bus su cui avviene l’I/O verso le periferiche, come il PCI, il PCI-X o il PCI-Express, hanno
caratteristiche alquanto diverse.
1 Banda: sensibilmente inferiore a quella dell’FSB,
anche perché la banda dell’FSB deve bastare per
supportare sia la comunicazione CPU-memoria sia
quella fra CPU e l’intero set di periferiche attestate sul bus di I/O.
2 Numero di periferiche supportate: un bus I/O non
è una connessione punto-punto fra due chip come
l’FSB, pertanto si pongono problemi di arbitraggio
del bus, bus mastering, accesso diretto alla memoria. Tipicamente il bus I/O supporta una mezza
dozzina di periferiche.
3 Frequenza di lavoro: in considerazione delle distanze sensibilmente maggiori coperte dai segnali
che viaggiano su un bus di I/O, la frequenza di lavoro è in genere inferiore a quella di un FSB. Fanno eccezione soltanto i moderni I/O bus seriali, nei
quali la frequenza è anzi incrementata per compensare il ridotto numero di piste circuitali e mantenere quindi buone prestazioni.
4 Compatibilità: le periferiche collegate all’I/O bus
possono essere prodotte da costruttori diversi: diventa quindi necessità inderogabile che le specifiche di funzionamento del bus (tempi, livelli elettrici, protocolli) siano rese pubbliche, siano specificate in modo chiaro e inequivocabile e siano
pensate per essere facili ed economiche da implementare in hardware.
Altra importante differenza sta nel fatto che sui
bus di I/O giocano un ruolo importantissimo le segnalazioni spontanee dalle periferiche verso la CPU
(dette interruzioni, o interrupt, perché il loro arrivo
richiede attenzione e “interrompe” per un istante
l’esecuzione dei programmi): è infatti frequente il
caso in cui una periferica abbia dei dati pronti da
comunicare, e questi dati si rendano disponibili in
un istante non controllabile dalla CPU, non soltanto quando i dati arrivano per cause esterne come il
traffico di rete entrante, ma anche se quei dati erano
stati richiesti da un programma: infatti, nel caso di
un’unità disco, il tempo intercorrente fra la richiesta
di lettura di un settore del disco e l’esecuzione della
lettura stessa è un tempo variabile in base alla posizione della testina e all’angolo del disco.
Oltre agli interrupt, un altro meccanismo tipico
dei bus di I/O ma non richiesto in un FSB è l’arbitraggio automatico delle risorse di sistema fra le periferiche assistito dal BIOS all’accensione della macchina
(si parla al riguardo di BIOS “plug and play”).
Un particolare tipo di bus di I/O è l’USB (Universal Serial Bus), un bus seriale utilizzato prevalentemente all’esterno del PC, che estremizza le caratteristiche sopra descritte: la banda (fino a 480 Mbit/s,
pari a 60 Mbyte/s, nel caso di USB 2.0) è ancora inferiore a quella dei bus I/O interni come il PCI; il numero di periferiche collegabili cresce a ben 127, con
supporto per collegamenti ad albero; la frequenza
di lavoro si deve necessariamente ridurre, viste anche le distanze in gioco (fino a 5 metri fra ogni peri-
Lezione 4
IT administrator - Hardware
ferica e la porta a cui è connessa, in assenza di ripetitori); la compatibilità, che, seppure non esente da
occasionali problemi, nell’esperienza quotidiana assicura un’interoperabilità più che soddisfacente fra
periferiche e PC di ogni marca. Da ricordare anche
il Firewire, con applicazioni simili a quelle dell’USB
ma solo apparentemente simile da un punto di vista
tecnico. Non soltanto per la velocità di funzionamento, che è diversa (400 Mbps e 800 Mbps rispettivamente per il Firewire 400 e il Firewire 800), ma per il
fatto che il Firewire consente comunicazioni dirette
(peer-to-peer) fra due periferiche della catena, senza l’intervento del PC, il quale né viene disturbato
con continue richieste di attenzione (interrupt) né
deve occuparsi di arbitraggio fra transazioni e copiatura di blocchi di dati, come deve invece fare nel
caso dell’USB. Firewire supporta inoltre l’allocazione
preventiva di una determinata quota certa, riservata, di banda per la comunicazione di due periferiche
della catena. I nodi di una catena Firewire svolgono
anche funzione di ripetitori, pertanto la catena può
raggiungere una notevole lunghezza senza degrado
di prestazioni.
I principali bus di I/O e le loro differenze: ISA,
MCA, EISA, PCI, PCI-Express, PC-card, USB,
Firewire
Seppure a un ritmo più lento rispetto all’FSB, la cui
evoluzione è spesso una questione proprietaria del fabbricante di CPU e North bridge, anche i bus di I/O hanno
subito una notevole evoluzione nel corso degli anni.
Naturalmente l’evoluzione è stata relativamente lenta, perché ogni generazione di I/O bus, quasi
sempre incompatibile con le precedenti, ha portato
con sé notevoli investimenti da parte di produttori e
utenti: sarebbe troppo dispendioso essere costretti
a sostituire tutte le periferiche ogni volta che cambia la tecnologia del bus, se questo avvenisse a intervalli più ravvicinati dell’arco di vita medio di una
macchina.
1.6.2.3 Conoscere
alcuni bus di
I/O, quali: ISA,
MCA, EISA, PCI,
PCI-Express,
PC-card, USB,
Firewire. Sapere le
principali differenze
fig. I
fig. II
I principali bus per PC
Nome
Anno
introduzione
ISA 8 bit (Industry 1981 (v. 8 bit
Standard
per PC XT)
Architecture)
ISA 16 bit o “AT
Bus” (Advanced
1984 (v. 16
Technology Bus)
bit per PC AT)
(fig. I)
MCA (Micro Channel
1987
Architecture)
EISA
(Extended ISA)
1988
(fig. II)
Tipo
di bus
Ampiezza
bus dati
Banda
Frequenza teorica
max
di lavoro
(MB/s)
Plug
and
play
Accesso
diretto alla Campo d’impiego
memoria
tipico
(DMA)
parallelo
8 bit
4.77 MHz
4.77
no
sì
I/O bus interno
parallelo
16 bit
8.33 MHz
16.66
no
sì
I/O bus interno
parallelo
16 e 32 bit
8-10 MHz
sì
I/O bus interno
parallelo
32 bit
8.33 MHz
Fino a 40 Parzialmente
33
no
sì
I/O bus interno;
sezione dischi di PC
server 386 e 486
Fino a 160
sì
sì
schede grafiche di
macchine 486
133
sì
sì
I/O bus interno
espansioni esterne
nei PC portatili
espansioni esterne
nei PC portatili
schede grafiche
accelerate in PC con
bus PCI
VL-Bus (VESA Local
Bus) (figura III)
1990
parallelo
32 bit
PCI
1992
parallelo
32 bit
Legata al
clock della
CPU (Fino a
40 MHz)
33 MHz
PCMCIA (PC-Card)
1991
parallelo
16 o 32 bit
33 MHz
133
sì
sì
CardBus (PCI in
formato PC Card)
1995
parallelo
32 bit
33 MHz
133
sì
sì
AGP 1x- 2x- 4x- 8x
(figura IV)
1997
parallelo
32 bit
sì
sì
PCI-X
(figura V e VII)
PCI-Express (PCI-e,
PCIe) (figura VI e VII
e VIII)
1998
parallelo
64 bit
133 MHz
1064
sì
sì
I/O bus interno
1 bit
2.500 MHz
250
sì
sì
I/O bus interno
ExpressCard
2004
sì
sì
espansioni esterne
nei PC portatili
USB 1.1
(figura X)
1996
seriale
1 bit
12 MHz
1.5
sì
no
USB 2.0
(figura X)
2000
seriale
1 bit
480 MHz
60
sì
no
FireWire 400 (IEEE
1394; i.Link)
(figura IX)
1995
seriale
1 bit
400 MHz
50
sì
sì
FireWire 800
(IEEE1394a)
2000
seriale
1 bit
800 MHz
100
sì
sì
2004
seriale (con
possibilità di
aggregazione)
doppio bus
seriale (USB
2.0 + PCI
Express 1x)
1 bit
+ 1 bit
66 MHz x1 266, 533,
– x2 – x4 – x8 1066, 2133
2.500 MHz
per PCIe, 480 250 + 60
MHz per USB
PC Open 47 www.pcopen.it
soprattutto
periferiche esterne
a bassa velocità
soprattutto
periferiche esterne
a media velocità
soprattutto
periferiche esterne
a media velocità
soprattutto
periferiche esterne
a media velocità
fig. III
fig. IV
fig. V
fig. VI
fig. VII
fig. VII
fig. IX
fig. X
IT administrator - Hardware
1.6.2.4 Sapere
come i diversi
bus di un sistema
comunicano (o
cooperano) insieme.
1.6.2.6 Conoscere il
nuovo standard PCI
Express, le modalità
di funzionamento e i
relativi vantaggi
1.6.2.5 Conoscere
quali risorse di
sistema gestiscono
il controller dischi
Fig. 9: Nelle varianti 4x,
8x e 16x del bus PCIe è
prevista l’aggregazione di
un certo numero di canali
PCIe 1x per costituire un
bus logico la cui capacità
è complessivamente 4,
8 o 16 volte maggiore di
quella delle singole linee
1x. Un modo di sfruttare
questa capacità è quello
di usare in parallelo i 4,
8 o 16 bus elementari
creando l’illusione di un
singolo bus N volte più
veloce.
Sapere come i diversi bus di un sistema
comunicano (o cooperano) insieme
Come dovrebbe risultare chiaro dopo questa panoramica, i vari tipi di bus (FSB, back-side bus, I/O bus,
bus periferico USB o FireWire) rispondono ad esigenze diverse. Per esempio, consideriamo un programma
in esecuzione che ha bisogno di leggere dati da un file
memorizzato su una unità disco esterna e memorizzarli su schermo.
Il programma risiede in RAM, ma per essere eseguito deve essere esaminato dalla CPU che richiede
alla RAM, tramite il Front-side bus (1) e il North bridge chip, la lettura delle celle di memoria contenenti le
istruzioni del programma.
Tali istruzioni, una volta lette, con buona probabilità verranno memorizzate nella cache L2 per velocizzare eventuali futuri accessi; la scrittura su cache L2
in alcune CPU avviene attraverso uno specifico bus
ad altissima velocità, il back-side bus (2).
Le istruzioni vengono eseguite una ad una, e quando arriva il momento di effettuare la lettura del file, il
programma incarica il sistema operativo di mandare
via USB i necessari ordini all’hard disk esterno. Per
questo la CPU comunica via FSB al North Bridge i dati; questi vengono passati dal North Bridge al South
Bridge, che gestisce le porte USB; a questo punto è il
bus USB (3) che si incarica di far pervenire i comandi
di lettura all’hard disk esterno USB.
Dopo un certo tempo il drive ha riposizionato la
testina e il disco ha ruotato quanto basta per portare
i settori da leggere sotto alla testina: i dati sono quindi disponibili e la periferica invia una segnalazione di
“dati pronti” al PC, che si traduce in una interruzione
di quello che sistema operativo e programmi stanno
facendo.
L’operazione prosegue quindi con la ricezione dei
dati da parte della CPU, che deve poi preoccuparsi di visualizzarli su schermo. Per questo il sistema
operativo deve inviare alla scheda grafica le informazioni necessarie per comporre l’immagine che dovrà
apparire: tali informazioni vengono spedite via FSB,
North Bridge, South Bridge e infine bus PCI (4), fino
alla scheda video. Anche per questo semplice scenario applicativo, come si vede, potrebbero essere stati
usati ben 4 tipi diversi di bus!
Conoscere quali risorse di sistema gestiscono
il controller dischi
Un tipo particolarmente esigente di periferica, dal
punto di vista della quantità di dati da trasferire e
dell’“imprevedibilità” con cui tali dati possono arrivare, è il controller del disco rigido. Infatti, quando
questa periferica riceve ordini di lettura, si prepara a
eseguirli riposizionando come necessario la testina e
attendendo che la rotazione del disco porti i settori
da leggere sotto la testina stessa, dopodichè inizia a
leggere e avendo una certa quantità di dati pronti per
essere trasferiti alla CPU, il controller può seguire tre
possibili strategie:
1 Per ogni byte letto da disco, può inviare alla CPU,
tramite il bus I/O, un segnale di interrupt, che sospenderà temporaneamente l’esecuzione di qualsiasi programma e consentirà al sistema operativo
di prelevare questo byte.
2 In alternativa, può accumulare temporaneamente i
dati in un proprio buffer (8 o 16 Mbyte al massimo
nei dischi PC di più larga diffusione) e informare la
CPU che ci sono dati pronti; sarà quindi la CPU a
prelevare il blocco di dati dal buffer.
3 Può accumulare i dati in un proprio buffer come
nello scenario precedente, ma trasferirli autonomamente in un’area di memoria in cui il sistema ope-
PC Open 48 www.pcopen.it
Lezione 4
rativo si aspetta che vengano “recapitati” i dati letti
da disco, informando la CPU solo a cose fatte.
Le prime due tecniche sono varianti di un approccio denominato Programmable Input/Output (PIO), in
cui il trasferimento dei dati dalla periferica alla CPU è
effettuato con un pesante coinvolgimento di quest’ultima: si tratta di un sistema svantaggioso, che rallenta
notevolmente il funzionamento del computer facendo
sprecare al processore del tempo altrimenti sfruttabile per eseguire programmi.
Per ovviare a questo inconveniente è stato introdotto il concetto di accesso diretto alla memoria da
parte della periferica (Direct Memory Access, o DMA),
con cui la CPU viene informata del processo quando
il trasferimento è già stato completato, ma senza che
abbia dovuto prendervi parte attivamente.
Per consentire il funzionamento del DMA, è necessario che la periferica, la CPU e il sistema operativo si
accordino sull’indirizzo e sull’estensione della regione di memoria sulla quale la periferica sarà autorizzata a scrivere dati senza il coinvolgimento della CPU.
Poiché le periferiche bisognose di questo tipo di
supporto potrebbero essere più d’una, è prevista una
chiara modellizzazione di più processi DMA paralleli sotto forma di “canali DMA”. Il numero di canali
DMA disponibili non è illimitato, in quanto ogni canale DMA richiede risorse dedicate al proprio funzionamento, che consistono essenzialmente in alcuni registri.
Inoltre, oltre ai canali DMA per l’esecuzione del trasferimento dati, è necessario che la periferica possa
generare degli interrupt verso la CPU per segnalare
l’inizio e soprattutto la fine dell’operazione. Anche i
livelli di interrupt, come vedremo, sono una risorsa
limitata, e devono essere assegnati, con priorità adeguata, alle sole periferiche che effettivamente ne hanno bisogno per il proprio funzionamento.
Conoscere il nuovo standard PCI Express,
le modalità di funzionamento
e i relativi vantaggi
Abbiamo già accennato alle caratteristiche del nuovo bus seriale PCI Express, che nella sua versione base lavora ad altissima frequenza su una singola linea
di comunicazione, ottenendo comunque prestazioni
(250 Mbytes/s) nettamente superiori a quelle di un
normale bus PCI consentendo al contempo un notevole risparmio di spazio sulla motherboard grazie al
connettore con pochissimi contatti (appena 18, nella versione 1x) e, di conseguenza, di piccole dimensioni.
Da notare comunque che esistono varianti di PCIExpress in cui viene aggregato un certo numero di
9
Lezione 4
IT administrator - Hardware
10
11
canali base per offrire una
banda complessivamente
superiore: i canali disponibili potranno essere usati tutti contemporaneamente da
una singola scheda, creando
l’illusione di un bus singolo
ancora più veloce (figura 9), oppure potranno essere
“spartiti” fra le varie periferiche (figura 10).
Accanto alla versione base, definita 1x, esistono
PCI-Express 4x (connettore a 32 pin, 1 Gbyte/s di banda aggregata), 8x (49 pin, 2 Gbyte/s) e 16x (82 pin, 4
Gbyte/s).
Da ricordare anche che il nuovo standard ExpressCard per schede d’espansione per PC portatili, che
sostituisce l’obsoleto PCMCIA/CardBus, fa uso della
tecnologia PCI-Express 1x, rendendo disponibile una
banda di ben 250 Mbyte/s (figura 11); inoltre, grazie
al ridottissimo numero di contatti tipico del PCI Express, le schede ExpressCard possono avere dimensioni molto inferiori rispetto a quelle delle vecchie
schede PCMCIA/CardBus.
Risorse di sistema
Conoscere le risorse di base del sistema, quali:
indirizzamento delle porte di I/O, IRQ, DMA.
Come abbiamo visto, il dialogo fra la CPU (o, più
propriamente, il sistema operativo) e le periferiche
che avviene per mezzo del bus di I/O si avvale di alcuni meccanismi di base che devono essere disponibili per consentire un efficiente funzionamento di
questo fondamentale processo. Nel complesso i meccanismi di base tipici dell’I/O su architettura PC/Intel
sono i seguenti:
• Porte di I/O, un modo specifico per indirizzare dati da scambiare con una determinata periferica (figura 13);
• Richieste d’interruzione, o interrupt request (IRQ),
generalmente organizzate in livelli di priorità, per
informare il sistema operativo che vi sono dati
pronti (figura 12);
• Canali di accesso diretto alla memoria (DMA), per
le periferiche che necessitano di un intenso scambio di dati e che sono in grado di gestirne il trasferimento in modo autonomo (figura 14).
Osserviamo che l’unica necessità assoluta per poter effettuare I/O è l’esistenza di un qualche sistema
per indirizzare i dati; in sistemi Intel è tipico farlo in
modo specifico, utilizzando uno spazio di indirizzamento dedicato solo all’I/O (Port-mapped I/O), per
mezzo delle porte di I/O sopra citate, mentre in sistemi basati su altri processori lo spazio gestito dalle
periferiche trova posto nello stesso spazio d’indiriz-
zamento in cui si trova anche la memoria (Memorymapped I/O).
Avendo a disposizione almeno un sistema di indirizzamento per l’I/O, la CPU potrebbe già gestire in
completa autonomia l’arrivo di dati dalle periferiche.
Basterebbe infatti che il sistema operativo sospendesse periodicamente (centinaia di volte al secondo)
l’esecuzione delle applicazioni e interrogasse “a turno” ogni singola periferica per verificare l’eventuale
presenza di dati da leggere: qualora ve ne fossero,
dovrebbe trasferirli in memoria, informando la periferica di averlo fatto. Infine dovrebbe riprendere l’esecuzione dei programmi interrotti. Questo processo
di cicli di verifica periodica attuati per iniziativa del
sistema operativo è detto polling delle periferiche e
deve essere eseguito con frequenza sufficientemente
alta per essere certi di accorgersi della presenza di
dati in arrivo prima che la periferica esaurisca lo spazio per accumularli. In tal caso, infatti, i dati in eccesso andrebbero persi.
Per esempio, se un hard disk è capace di fornire 20
Mbyte/s di dati, in un millisecondo si accumuleranno
20 Kbyte nel buffer del controller. Se si ammette, per
ipotesi, che questo buffer abbia una capacità di 100
Kbytes, è immediato riconoscere che se i dati non
vengono prelevati dal sistema operativo, la periferica ha un’autonomia di soli 5 millisecondi prima che il
buffer si saturi. Il sistema operativo, quindi, dovrebbe
garantire di effettuare un polling completo delle periferiche al massimo ogni 5 millisecondi. Poiché inoltre
non è possibile sapere a priori né quali, né quante periferiche stiano fornendo dati, per sicurezza si deve
presumere che tutte le periferiche possano fornire dati contemporaneamente, pertanto ogni 5 millisecondi il polling dovrà ispezionare tutte le periferiche ed
essere sufficientemente veloce da trasferire, in quel
breve arco di tempo, tutti i dati di tutte le periferiche.
Senza contare che, finita l’operazione e in attesa che
inizi il pros12
simo polling,
al processore dovrà avanzare anche un
po’ di tempo
per tornare a
occuparsi dell’esecuzione
dei programmi! Come si vede il processo
di I/O è operazione alquanto
gravosa che,
se interamente affidata a
CPU e sistema
13
operativo con
uno schema di
polling, rischia
di penalizzare seriamente
le prestazioni
della macchina.
Molto meglio è chiedere la collaborazione delle
periferiche, facendo in modo che siano
direttamente
PC Open 49 www.pcopen.it
Fig. 10: Un altro modo
di impiegare le linee di
un bus PCIe multiplo
è quello di sfruttarlo
per quello che è, ossia
come un insieme di
bus indipendenti,
che possono essere
usati per far avvenire
simultaneamente
comunicazioni con
periferiche diverse, o
addirittura fra coppie
di periferiche, senza
impegnare la CPU.
Questa flessibilità
consente di aumentare le
prestazioni complessive
in quanto le periferiche
non devono contendersi
il bus: è come se nel
PC ci fossero 4, 8 o 16
bus indipendenti, quasi
come in una topologia “a
stella”
Fig. 11: Le schede di
espansione ExpressCard
per PC portatili, sia nel
formato ExpressCard 34
sia in quello 54 dalla
curiosa forma “a L”,
possono disporre di un
bus PCIe 1x (in aggiunta
a un bus USB 2.0) e di
conseguenza offrono
prestazioni ben maggiori
di quelle delle precedenti
schede PCMCIA o
CardBus.
1.7 Risorse di
sistema
1.7.1 Comprendere
le risorse di sistema
1.7.1.1 Conoscere
le risorse di base
del sistema, quali:
indirizzamento delle
porte di I/O, IRQ,
DMA
Fig. 12: L’architettura
PC mette a disposizione
numerose linee IRQ
per gestire l’I/O
su interruzione. La
schermata Visualizza
Risorse per Connessione
della Gestione Periferiche
del Pannello di Controllo
permette di rendersene
conto.
Fig. 13: Esempio
della situazione
complessiva delle porte
di I/O impiegate dalle
periferiche di un PC.
IT administrator - Hardware
14
Lezione 4
Sapere cosa sono gli indirizzi di I/O
e le relative modalità di funzionamento
1.7.1.2 Sapere
cosa sono gli
indirizzi di I/O e le
relative modalità di
funzionamento
Fig. 14: Sempre dal
Pannello di Controllo
è possibile esaminare
l’insieme dei canali DMA
attualmente riservati per
l’uso da parte di qualche
periferica
loro (mediante un interrupt, o IRQ, come vedremo
fra breve) a informare CPU e sistema operativo della
disponibilità di dati: in questo modo la CPU non dovrà
più preoccuparsi di controllare periodicamente se vi
siano dati pronti presso qualche periferica, ma dovrà
intervenire solo su segnalazione, un evento che sarà
di norma molto meno frequente di un polling ripetuto
ogni 5 millisecondi. Inoltre, alcune periferiche potranno addirittura provvedere al trasferimento dei dati in
memoria in modo autonomo, interrompendo la CPU
non per chiederle di prelevarli dal buffer della periferica, ma solo per informarla che i dati sono già stati
trasferiti in un’area di memoria concordata.
Questa sorta di “outsourcing” del lavoro di I/O consente alla CPU di non sprecare tempo prezioso su banali operazioni collaterali, e di focalizzarsi invece sul
suo compito principale che è l’esecuzione degli algoritmi dei programmi: le prestazioni della macchina in
tal modo migliorano notevolmente, al costo di una
leggera complessità aggiuntiva di bus e periferiche.
Come già visto, la comunicazione fra CPU/sistema
operativo e periferiche avviene fisicamente sulle linee
circuitali del bus, ma da un punto di vista logico va
anche considerato l’aspetto dell’indirizzamento delle informazioni trasferite. Queste informazioni possono essere sia dati in senso stretto (per esempio i dati
letti da disco) sia informazioni di controllo, come un
comando che viene inviato dal sistema operativo alla
periferica (per esempio: “espellere il CD dal drive!”) o
un’informazione di stato che il sistema operativo richiede alla periferica (per esempio: “è chiuso il cassetto del drive CD-ROM?”). Indipendemente dalla natura delle informazioni trasferite, però, ogni qualvolta
un valore viene letto o scritto su una periferica, oltre
a specificare di quale periferica si tratta è necessario
precisare l’indirizzo di quel dato nell’ambito del dominio di competenza della periferica stessa.
L’indirizzamento consiste nel fornire una posizione
in uno spazio logico suddiviso in locazioni, ognuna
identificata univocamente da un numero intero che è
l’indirizzo della locazione stessa.
Nei PC esistono due spazi logici in cui è possibile
indirizzare risorse per quanto riguarda l’I/O: lo spazio di indirizzamento della memoria (memory address
space) e lo spazio di indirizzamento dell’I/O (I/O address space o semplicemente I/O space).
• Nel caso del memory addressing, la periferica è
progettata per rispondere a richieste di lettura/scrittura rivolte a determinate locazioni dello spazio di indirizzamento della memoria, proprio come se fosse
un banco di RAM, seppure, in genere, con tempi di risposta molto più lunghi di quelli della RAM vera e propria. Per accedere in lettura/scrittura alla periferica
in questa modalità il sistema operativo usa istruzioni
(load/store) uguali a quelle con cui accederebbe alla
memoria, semplicemente applicandole a indirizzi che
ricadano entro l’area di competenza della periferica.
• Nel caso dell’I/O address space, la periferica è
mappata su un diverso spazio d’indirizzamento, dedicato esclusivamente all’I/O, e le istruzioni usate per
accedervi sono diverse (in e out).
Se una periferica utilizza il memory addressing, lo
Gestione della memoria fisica e virtuale nei sistemi operativi Windows (fonte Microsoft)
Nella tabella la quantità
di memoria virtuale
indirizzabile dalle
applicazioni è inferiore a
quella complessivamente
gestibile dal sistema
operativo, che dipende
dalla specifica versione
di Windows. La quantità
di memoria virtuale può
essere maggiore o uguale
alla quantità di memoria
fisica installata, il cui
limite massimo dipende
anch’esso dalla specifica
versione di Windows
oltre che dall’hardware
impiegato.
Sist. operativo e versione Edizione
Standard
Web
Mem. Virtuale Massima memoria fisica
4 GB
4 GB
4 GB
2 GB
64 GB, se l’hardware supporta la modalità
4 GB
Microsoft Windows Server Enterprise
Physical Address Extension (PAE)
2003 SP 1
Enterprise (64-bit)
16 terabyte
1 terabyte
Datacenter
4 GB
128 GB, se l’hardware supporta la modalità PAE
Datacenter (64-bit)
16 terabytes 1 terabyte
Standard
4 GB
4 GB
Web
4 GB
2 GB
Enterprise
4 GB
32 GB, se l’hardware supporta la modalità PAE
Windows Server 2003
Enterprise (64-bit)
16 terabytes 64 GB
Datacenter
4 GB
128 GB, se l’hardware supporta la modalità PAE
Datacenter (64-bit)
16 terabytes 512 GB
Home
4 GB
4 GB
Windows XP
Professional
4 GB
4 GB
64-bit Edition Version 2003 16 terabytes 128 GB
Professional
4 GB
4 GB
Server
4 GB
4 GB
Windows 2000
Advanced Server
4 GB
8 GB
Datacenter Server
4 GB
32 GB, se l’hardware supporta la modalità PAE
PC Open 50 www.pcopen.it
Lezione 4
IT administrator - Hardware
15
spazio a disposizione è relativamente abbondante.
Nei sistemi PC a 32 bit, che oggi rappresentano ancora la stragrande maggioranza dei PC installati nel
mondo, lo spazio di indirizzamento della memoria è
ampio 4 Gigabyte, di cui le versioni più diffuse dei sistemi operativi Windows riservano 2 Gbyte per dati
e applicazioni, trattenendo i rimanenti 2 Gbyte per le
esigenze del sistema operativo e dei driver delle periferiche (tabella nella pagina precedente). È in quest’area che vengono riservati appositi spazi per mappare le periferiche: vere e proprie “finestre” attraverso le quali i driver delle periferiche “vedono” la memoria interna e i registri di controllo dei dispositivi
che devono gestire (figura 15). È importante che le
periferiche siano realizzate in modo da accettare di
essere indirizzate in questo intervallo di memoria (figura 16). Se invece, per qualche restrizione del loro
hardware, il loro indirizzo ricadesse in un’area occupata dalla RAM, per evitare conflitti fra memoria
e periferica il sistema operativo sarebbe costretto a
“oscurare” la porzione di RAM che occupa gli stessi
indirizzi dell’area gestita dalla periferica, “sprecando”
così, di fatto, una certa quantità di memoria fisica che
diventerebbe inaccessibile. Questo possibile conflitto
di indirizzamento fra periferiche e memoria è il principale svantaggio possibile con periferiche memory
addressed, anche se generalmente si presenta soltanto con periferiche di concezione antiquata, risalenti
16
all’epoca in cui i PC avevano uno spazio di indirizzamento molto più ristretto di quello attuale.
La soluzione dell’I/O addressing risolve alla radice il problema del conflitto fra RAM e periferiche, in
quanto queste ultime si trovano in uno spazio di indirizzamento totalmente distinto da quello in cui il sistema “vede” la memoria. Purtroppo, però, vi è un altro problema: lo spazio di I/O è alquanto ristretto, in
quanto su sistemi basati su processori x86 esso adotta indirizzi di soli 16 bit. Questa restrizione fa sì che
siano disponibili soltanto 216 = 65.536 indirizzi (64 K),
che oltretutto le periferiche devono spartirsi, poiché
ovviamente non deve mai accadere che due periferiche utilizzino lo stesso intervallo di indirizzi (in caso
contrario, le comunicazioni rivolte a quegli indirizzi
verrebbero ricevute da due periferiche contemporaneamente, con esiti catastrofici. Pertanto, gli indirizzi
di I/O costituiscono una risorsa scarsa del sistema, e
diventa piuttosto serio il problema dell’amministrazione di questa risorsa.
• ogni periferica deve essere configurata per “affacciarsi” su una propria finestra, preferibilmente piccola, aperta sullo spazio di I/O a un indirizzo ben preciso (figura 5);
• il sistema operativo, e in particolare i driver delle
periferiche, devono conoscere l’indirizzo delle finestre di I/O space usate dalle periferiche stesse.
In passato (bus ISA e vecchie versioni di Windows)
la prima regolazione si effettuava fisicamente sulle
periferiche agendo su ponticelli e microinterruttori,
e la seconda si faceva impostando esplicitamente (e
manualmente) l’indirizzo giusto durante la procedura d’installazione. Un errore in queste impostazioni
poteva significare malfunzionamenti della periferica,
conflitti con altre periferiche, blocco del sistema.
Oggi, nel caso del bus PCI con sistema operativo
Windows in versione recente (per esempio XP), all’accensione del PC il BIOS, le periferiche e il sistema
operativo dialogano fra loro secondo una ben precisa
procedura di negoziazione che li porta a determinare
automaticamente indirizzi ed estensioni delle varie finestre di I/O allocate alle periferiche. Questo sistema
totalmente automatico è denominato Plug and play.
Sapere cosa sono le richieste d’interruzione
(IRQ) e le relative modalità di funzionamento
Un problema di arbitraggio assolutamente analogo a quello degli indirizzi di I/O riguarda le richieste
di interruzione (Interrupt ReQuest, o IRQ). Quando
una periferica ha bisogno di immediata attenzione
da parte del sistema operativo (o, più precisamente, del proprio driver), e non vuole o non può attendere che il driver di sua iniziativa la interroghi, è la
periferica che deve prendere l’iniziativa, interrompendo per un istante l’esecuzione di programmi da
parte della CPU per avvisarla dell’improvvisa urgenza. Questa operazione consiste appunto nell’invio
di un segnale di interrupt (IRQ) che viene ricevuto
dalla CPU e trattato da un apposito programma che
analizza la segnalazione ricevuta e informa il driver
di periferica di occuparsene appena possibile.
Poiché in generale nel sistema sono installate numerose periferiche, è necessario che le segnalazioni siano distinguibili. Per questo nei sistemi PC è
disponibile un certo numero di IRQ distinti (precisamente 16: vedi TABELLA 4). All’arrivo di un interrupt, il sistema operativo deve verificare, in base
alla configurazione conosciuta, quale periferica è
associata a quel particolare tipo di IRQ e attivare il
corrispondente device driver.
Tuttavia il numero di periferiche presenti in un
PC può essere anche molto maggiore di 16. Infatti le
PC Open 51 www.pcopen.it
Fig. 15: Mappa della
memoria (semplificata)
per le versioni 32 bit di
Windows. Le applicazioni
utente risiedono nei 2
GB inferiori (indirizzi da
00000000 a 7FFFFFFF
esadecimale), le aree
di sistema sono invece
allocate nei 2 GB
superiori (da 7FFFFFFF
a FFFFFFFF). Le aree
di memoria usate dai
drivers, anche come
“zone di atterraggio”
per i dati trasferiti
mediante DMA, risiedono
solitamente nell’area di
sistema.
1.7.1.3 Sapere cosa
sono le richieste
d’interruzione (IRQ) e
le relative modalità di
funzionamento
Fig. 16: Dal Pannello
di Controllo è possibile
notare come gli indirizzi
utilizzati per la gestione
delle periferiche PCI
più esigenti in termini
di trasferimenti dati
DMA (schede grafiche,
controller USB, schede
di rete) ricadano tutte
nell’area di memoria di
sistema, ben al di sopra
dell’indirizzo 7FFFFFFF
IT administrator - Hardware
Tutti i PC, dall’AT in
poi, dispongono di 16
IRQ (per la verità non
tutti utilizzabili) ottenuti
impiegando due circuiti
PIC (Programmable
Interrupt Controller)
collegati in cascata:
il primo, presente
nell’architettura fin
dai tempi del PC IBM
originario, gestisce gli
IRQ da 0 a 7; il secondo,
collegato a IRQ2,
gestisce gli IRQ da 8 a
15. Se nel sistema è
presente un chip APIC
(è il caso di tutti i PC
attuali) la restrizione sul
numero di IRQ gestiti
sostanzialmente sparisce
1.7.1.4 Sapere
cosa sono gli
accessi diretti alla
memoria (DMA) e le
relative modalità di
funzionamento.
Fig. 17: Se l’area di
I/O usata dal driver
per comunicare con
la periferica è troppo
piccola rispetto
alla quantità di dati
tipicamente trasferita
a ogni transazione, e
non si usa una tecnica
DMA, sarà necessario
interrompere la CPU
numerose volte,
rallentando i programmi
in esecuzione. Meglio
quindi mappare la
periferica sulla memoria,
dove non ci sono
restrizioni di spazio
troppo severe, oppure
usare il DMA.
IRQ predefiniti su sistemi PC
privi di controller ACPI
IRQ
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
Impiego
System Timer
Gestione Tastiera
Riservato per la gestione degli IRQ da 8 a 15
Condiviso per la gestione delle porte seriali COM2
e COM4
Idem, COM1 e COM3
Gestione di porta parallela LPT2 e schede audio
Gestione del floppy disk drive
Gestione della porta parallela LPT1
Orologio
Collegamento a IRQ2
Riservato
Riservato
Gestione porta mouse PS/2
Controllo del coprocessore matematico
Gestione hard disk IDE, canale primario
Idem, canale secondario
periferiche non sono solo quelle fisicamente costituite da schede di espansione installate sui connettori del bus PCI. Vi è un certo numero di periferiche
standard di sistema (quasi tutte a bassa velocità)
che possono anche non essere collegate al bus PCI,
ma hanno comunque bisogno di un IRQ per “farsi
sentire”, come la tastiera, il mouse, le porte seriali,
l’orologio, il controller del disco IDE.
Per questa ragione, può succedere (sui PC recenti
è anzi la norma) che due o più periferiche debbano
condividere lo stesso IRQ. Questa delicata situazione è potenzialmente pericolosa, ma appositi meccanismi, parte elettronici, parte software, consentono
di gestire in modo non catastrofico le situazioni in
cui due periferiche mappate sullo stesso IRQ debbano inviare contemporaneamente un’interruzione. Il
rischio, altrimenti, sarebbe quello di “perdere” uno
dei due interrupt simultanei, con la conseguenza di
non dare attenzione a una periferica che ne ha bisogno (se si trattasse del controller del disco, si verificherebbe molto probabilmente una perdita dei dati
letti, o peggio).
Ovviamente, nonostante questi meccanismi siano
in grado di evitare veri e propri malfunzionamenti,
è chiaro che una condivisione di interrupt riduce le
prestazioni delle periferiche coinvolte, in quanto nei
casi di IRQ simultanei una delle periferiche in conflitto deve attendere che termini l’operazione sulla
periferica la cui interruzione è stata servita per prima; questa attesa provoca sicuramente un rallentamento, inoltre, se troppo prolungata, potrebbe anche causare problemi più seri.
È per questo che, quando la situazione richiede
che due o più periferiche condividano lo stesso IRQ,
potendo scegliere è meglio fare in modo che siano
periferiche a bassa velocità, che faranno uso relativamente di rado del segnale d’interruzione; o, quantomeno, evitare di abbinare a uno stesso IRQ più di
una periferica ad alta velocità. In concreto: se su un
IRQ è già attestato un controller del disco fisso, meglio non associare a quello stesso IRQ un’altra periferica “veloce”, come una scheda di acquisizione
video.
Pur con tutte le cautele del caso, se le periferiche
cominciano a diventare troppo numerose e tutte
molto “esigenti” in termini di banda di trasferimento, una corretta attribuzione manuale degli IRQ può
diventare un esercizio complesso, quasi un rompicapo, in cui a volte si finisce con il procedere per
PC Open 52 www.pcopen.it
Lezione 4
tentativi.
Per superare questa difficoltà l’evoluzione dell’architettura PC ha previsto da un lato di automatizzare l’arbitraggio degli IRQ fra le periferiche, nel contesto della negoziazione Plug and Play, e dall’altro di
aumentare notevolmente il numero degli IRQ in modo tale da minimizzare la probabilità che due periferiche abbiano a dover condividere un IRQ.
Sapere cosa sono gli accessi diretti alla memoria
(DMA) e le relative modalità di funzionamento
Le periferiche che producono dati con elevata frequenza o in grande quantità pongono l’esigenza di
eseguire numerosi trasferimenti di grossi blocchi di
dati verso la CPU e il sistema operativo.
In prima istanza è possibile avvalersi delle tecniche di base dell’I/O con le periferiche: I/O addressing e memory addressing. Entrambe, però, non offrono prestazioni soddisfacenti per i casi più “pesanti” da trattare:
• Nel caso dell’I/O addressing, come abbiamo visto,
lo spazio di indirizzamento, già scarso (appena
64K), deve per giunta essere spartito fra le periferiche, col risultato che in molti casi l’area su cui
una singola periferica può contare per i suoi trasferimenti è di poche decine di bytes. Se la “finestra” di I/O è ampia 100 bytes, e i blocchi di dati
che la periferica deve trasferire sono grandi 1000
bytes, per trasferire un blocco occorreranno 10
transazioni elementari da 100 bytes, magari innescate da una sequenza di 10 IRQ che costringono
il processore ad arrestarsi e a cambiare contesto
di esecuzione per occuparsi di leggere i prossimi
100 bytes dal bus. Questa modalità di funzionamento è troppo “sacrificata” e inadatta alle esigenze della periferica (figura 17).
• Nel caso del memory addressing, la disponibilità di spazio d’indirizzamento è decisamente più
ampia e le “finestre” gestite dalle periferiche possono essere abbastanza grandi da consentire di
completare i trasferimenti in unica transazione,
riducendo, parallelamente, la frequenza con cui
è necessario mandare degli IRQ alla CPU per informarla della disponibilità dei dati. L’efficienza
è quindi nettamente migliore rispetto al sistema
precedente, tuttavia rimane la necessità di un
coinvolgimento diretto della CPU la quale deve
assumere direttamente il controllo del trasferimento dei dati. E’ evidente che questa impostazione penalizza le prestazioni applicative del si-
17
Lezione 4
stema. Infatti, in un PC basato su CPU single core,
durante questa operazione la CPU non può eseguire programmi, pertanto a ogni trasferimento
gli applicativi subiscono una pausa dell’ordine
dei micro o millisecondi: le singole pause non sono avvertibili dall’utente, ma l’effetto di un gran
numero di queste interruzioni è un rallentamento, questo sì percepibile, del funzionamento generale di sistema operativo e programmi. In un PC
dual core o multi core l’effetto è meno evidente,
in quanto il carico di lavoro di I/O può essere assorbito da uno dei core della CPU rimasto eventualmente “scarico”, mentre gli altri possono continuare l’elaborazione dei programmi.
Come già accennato, l’approccio più vantaggioso
per gestire il trasferimento di grossi volumi di dati
dalla periferica verso il sistema operativo è quello
di consentire alle periferiche di funzionare da “master” del trasferimento stesso, permettendo loro di
scrivere direttamente in memoria RAM. Per le periferiche memory-addressed, che occupano aree dello stesso spazio in cui si trova la RAM, si tratterà
di fatto di una copiatura di dati da una locazione
all’altra di uno stesso spazio di indirizzamento (il
memory space); per quelle I/O-addressed, saranno
invece effettuate letture di dati dallo spazio I/O (su
cui si “affaccia” la periferica) e scritture degli stessi
valori su determinate locazioni del memory space
(dove è ubicato il banco di memoria RAM a cui sono destinati i dati).
Il procedimento descritto è detto Accesso Diretto
alla Memoria (Direct Memory Access, o DMA) e di solito si articola nelle seguenti fasi logiche:
• La periferica informa il sistema operativo, per
mezzo di un IRQ, che vi sono dati pronti.
• Il sistema operativo riconosce da quale periferica
proviene l’IRQ e informa il driver competente di
trattare la situazione.
• Il driver riconosce che occorre effettuare un grosso trasferimento dati dalla periferica alla memoria centrale, e decide di affidarlo alla periferica
attivando una transazione DMA.
• Se necessario, l’hardware (di solito un circuito
di gestione denominato DMA Controller) viene
informato dal driver che un determinato canale
DMA sta per essere impegnato da un trasferimento. Con il bus PCI, che supporta il bus mastering,
questa esigenza è venuta meno; il supporto di
un DMA controller serviva soprattutto con alcune vecchie periferiche che non erano in grado di
svolgere il ruolo di “master” di un trasferimento.
• Il trasferimento DMA viene inizializzato dal driver indicando il verso del trasferimento (lettura
o scrittura su RAM; in questo esempio, scrittura)
e l’indirizzo dell’area di memoria interessata (che
deve avere dimensioni sufficienti per ospitare tutti i dati in arrivo).
• La periferica (nel caso PCI bus mastering) o il
DMA Controller (nel caso di bus e periferiche non
bus mastering) riceve dal driver il “via libera” all’attivazione del trasferimento.
• La CPU torna a eseguire applicazioni e sistema
operativo.
• Nel frattempo, i dati vengono copiati dalla periferica all’area RAM di destinazione senza che la
CPU venga interrotta.
• Al termine del trasferimento, la periferica o il
DMA Controller inviano alla CPU un interrupt per
informarla che l’operazione è stata completata.
• Il driver prende atto del completamento della
transazione e inizia ad elaborare i dati leggendoli
direttamente dalla RAM.
IT administrator - Hardware
In un PC possono anche avvenire contemporaneamente più operazioni DMA indipendenti, ovviamente a condizione che non siano dirette verso gli
stessi indirizzi (ad assicurarsi che questo non avvenga provvedono il sistema operativo e i drivers).
Per ragioni gestionali, di efficienza e di limitazioni fisiche della macchina, esiste comunque un limite al numero di transazioni DMA concomitanti che
possono essere supportate e per questo si parla di
“canali DMA”. Si tratta di una modellizzazione logica che aiuta a tenere sotto controllo l’uso di queste
risorse. Il loro numero risulta in genere sufficiente
(già nei vecchi PC con bus ISA i canali DMA disponibili erano ben 7), tuttavia si tratta pur sempre di
una risorsa limitata che il sistema operativo deve
amministrare, controllando, in particolare, che uno
stesso canale DMA non venga condiviso da due o
più periferiche.
Nei vecchi PC con bus ISA l’indirizzo di destinazione del trasferimento DMA era ampio appena 16 bit,
limitando notevolmente l’ampiezza dell’area (buffer) utilizzabile in RAM. Inoltre, per lo stesso motivo, gli indirizzi DMA erano circoscritti ad un’area
di memoria ben precisa. Con il bus PCI gli indirizzi
sono a 32 bit, con il doppio beneficio che i buffer
DMA possono teoricamente essere molto più grandi (quindi le operazioni DMA possono essere più
lunghe e gli IRQ per dare loro inizio possono essere
meno frequenti) e possono teoricamente risiedere
in qualunque punto dello spazio d’indirizzamento a
32 bit (ampio, lo ricordiamo, 4 gigabytes).
Diventerebbe così possibile, per un driver, istruire la periferica da esso gestita a dirigere i trasferimenti DMA in un ampio buffer situato direttamente nello spazio dati del driver stesso, con notevole
semplificazione. In realtà, spesso esistono comunque delle limitazioni sia alla dimensione dei buffer
sia alla loro posizione in memoria.
Un’ulteriore restrizione riguarda i moderni sistemi con CPU e sistema operativo a 64 bit, la cui diffusione è in progressivo aumento. In un sistema con
indirizzi a 64 bit la mappa della memoria è enormemente più estesa di quella di “soli” 4 Gbyte dei
sistemi a 32 bit. Molte periferiche, però, utilizzano una circuiteria DMA che supporta solo indirizzi
a 32 bit, e quindi possono effettuare trasferimenti
dati diretti soltanto verso buffer situati nei primi 4
Gbyte del memory space. Con queste periferiche,
in un sistema 64 bit, se un driver desidera ricevere i
dati in un’area di indirizzi “alti” sarà necessario far
seguire alla transazione DMA un ciclo di copiatura per spostare i dati dove desiderato, ancora una
volta con l’effetto di ridurre le prestazioni. Pur con
queste restrizioni, che gradualmente saranno superate, la flessibilità degli attuali sistemi DMA per PC
rimane comunque superiore a quella offerta dai PC
meno moderni.
Sapere dell’esistenza di APIC
Nei primi PC gli IRQ erano soltanto 8, ed erano
gestiti da un chip specializzato, l’Intel 8259, detto
Programmable Interrupt Controller (Controllore programmabile degli interrupt), o PIC. Ben presto questo limite apparve troppo stretto, così, fin dalla prima evoluzione dell’architettura PC, l’ormai leggendario PC AT del 1984 basato su processore 80286,
venne aggiunto un secondo chip 8259, portando a
16 il totale di IRQ gestibili dalla macchina. Questo
numero non è più cresciuto per diversi anni, e la
coppia di chip 8259 è di fatto scomparsa essendo
state inglobate le sue funzioni nel South Bridge dei
moderni chipset per schede madri. Essendosi però
PC Open 53 www.pcopen.it
1.7.1.5 Sapere
dell’esistenza di APIC
IT administrator - Hardware
Fig. 19: in questa vista
di Everest Home Edition
la visualizzazione si
riferisce alle risorse
impiegate da ciascuna
periferica. Molte risorse
sono assegnate in modo
esclusivo a una unica
periferica, ma si nota
che alcune periferiche
condividono IRQ e perfino
porte di I/O con altre
periferiche.
riacutizzata col tempo l’esigenza di poter disporre
di un numero maggiore di IRQ, si è deciso di seguire
una strada radicalmente diversa, introducendo un
nuovo e più avanzato tipo di controllore per gli interrupt (Advanced Programmable Interrupt Controller, APIC).
Con l’architettura APIC il numero di IRQ aumenta
quanto basta per allontanare la necessità di condivisioni fra periferiche (la condivisione può ancora
avvenire per scelta del sistema operativo, se le periferiche sono compatibili, per “risparmiare” IRQ);
se gli 8259 supportavano soltanto 8 IRQ ognuno, la
maggior parte delle implementazioni APIC in commercio ne supporta 24. I chip APIC inoltre sono progettati per risolvere autonomamente il problema
della distribuzione degli IRQ alle CPU in un sistema
multiprocessore. Oltre all’adozione del controller
APIC per aumentare il numero di IRQ, l’architettura
PC con bus PCI prevede l’integrazione nel chip South Bridge di appositi circuiti capaci di collegare gli
interrupt originati sul bus PCI a diversi possibili IRQ
del controller APIC; la corrispondenza è configurabile via software. Così facendo il sistema operativo acquisisce la capacità di riassegnare, o per meglio dire
ridirigere, gli interrupt emessi dalle periferiche PCI
verso un IRQ che risulta “libero”, in base a un’analisi della situazione hardware.
1.7.2 Gestire le
risorse di sistema
1.7.2.1 Essere in
grado di verificare
le attuali risorse di
base del sistema,
utilizzate e disponibili
Gestire le risorse di sistema
Fig. 18: La pratica utility
gratuita Everest Home
Edition dà accesso alle
stesse informazioni
della sezione Gestione
Periferiche del Pannello
di Controllo di Windows
(e anche ad altre utili
notizie aggiuntive) con
un’interfaccia più chiara e
“amichevole”. In questo
esempio di elenco delle
periferiche PCI si noti,
per esempio, come il
controller Fast Ethernet
di questo PC disponga di
Bus Mastering per poter
trasferire in memoria i
dati in arrivo dalla rete
senza impegnare la CPU
18
Essere in grado di verificare le attuali risorse di
base del sistema, utilizzate e disponibili
Dal momento che indirizzi I/O, IRQ e canali DMA
sono risorse scarse, il sistema operativo vigila costantemente sul loro impiego e fa da arbitro nelle richieste avanzate dalle periferiche per appropriarsene. Nella maggior parte delle situazioni la
Fig. 20: La schermata
iniziale della Gestione
Periferiche, a cui si
accede dal Pannello
di Controllo alla voce
Sistema. Inizialmente
viene presentato l’elenco
di periferiche installate,
raggruppate per tipo.
Per vedere in dettaglio di
quali periferiche si tratta
è sufficiente espandere i
nodi dell’albero.
Lezione 4
19
20
supervisione di Windows risulta efficace e non si
verificano malfunzionamenti o inefficienze. In casi
particolari, come quando si verificano blocchi sporadici del sistema dopo aver installato una nuova
periferica, può comunque risultare utile all’utente
esaminare la situazione per tentare di identificare
le cause ed eventualmente porvi rimedio. Per farlo
si possono utilizzare gli strumenti messi a disposizione dallo stesso Windows oppure ricorrere a utili-
PC Open 54 www.pcopen.it
Lezione 4
21
ties di terze parti, spesso gratuite, che in genere risultano più facili da utilizzare e forniscono informazioni più chiare e complete. Una di queste utilities
gratuite, Everest Home Edition, è mostrata in figura
18 e 19. E’ comunque importante impratichirsi nell’uso degli strumenti di base di Windows, in quanto
sono i soli ad essere sempre disponibili su qualunque macchina.
Per esaminare lo stato d’impiego delle risorse di
sistema su Windows XP si scelga Start/Pannello di
Controllo/Sistema; nella scheda Hardware, si selezioni Gestione periferiche. Apparirà la finestra in figura
20, che nella visualizzazione predefinita elenca le
periferiche per tipo; dal menu Visualizza si selezioni
invece Risorse per tipo. Apparirà un albero con quattro rami come quello in figura 21:
• Accesso diretto alla memoria (DMA), in cui è
possibile vedere l’elenco dei canali DMA attualmente riservati, con il relativo numero (Fig. 14)
• Input/output (IO), in cui è riportato un elenco ordinato per indirizzo delle aree di I/O space utilizzate dalle periferiche, con l’indicazione della periferica titolare di ciascuna area (Fig. 13)
• Livello di interrupt (IRQ), in cui è possibile vedere quanti e quali interrupt sono impiegati dalle
periferiche di sistema, e si può inoltre notare quali IRQ sono condivisi fra più periferiche (come già
detto, paradossalmente questo può capitare perfino in presenza di IRQ ancora liberi, per precisa
scelta del sistema) (Fig. 12)
• Memoria, in cui è riportata l’indicazione delle
aree dello spazio di indirizzamento della memoria attualmente riservate al dialogo con le periferiche o destinate ad altre funzioni del sistema.
(Fig. 16)
Essere in grado di modificare l’assegnazione
delle risorse di base del sistema
La configurazione generale di alcune risorse di sistema come gli IRQ, il supporto dell’hardware al sistema Plug and Play, e in alcuni modelli di PC, anche
impostazioni di funzionamento del bus PCI, sono
operazioni che è possibile effettuare dal BIOS.
Va detto che Windows cerca di attuare una propria strategia di controllo completo della macchina
IT administrator - Hardware
che generalmente consente di raggiungere in modo
automatico il miglior compromesso fra prestazioni e
stabilità, ma evidentemente lo spazio di manovra in
cui Windows può far agire i suoi algoritmi euristici
di arbitraggio risorse fra le periferiche è delimitato
dalle restrizioni imposte da BIOS.
E’ quindi sconsigliabile imporre inutili restrizioni
a livello di BIOS, a meno che non vi sia una specifica indicazione a farlo, e lasciare il più possibile libero Windows di sfruttare o non sfruttare le capacità
dell’hardware.
Un’altra buona ragione per non basarsi sulle impostazioni del BIOS per gestire eventuali problemi
di funzionamento delle periferiche deriva dal fatto
che non tutti i BIOS offrono lo stesso set di funzioni:
alcune motherboard sono dotate di un BIOS fatto apposta per i patiti del “tuning” e dell’“overclocking”
e di conseguenza danno accesso a un ampio spettro di regolazioni; altre, generalmente impiegate in
PC destinati a una clientela meno specialistica, controllano un insieme di impostazioni decisamente più
ristretto.
Non si può quindi fare affidamento sul fatto che il
BIOS di ogni PC possieda tutte le regolazioni (il cui
effetto, fra l’altro, è sempre da verificare sulla documentazione della motherboard in quanto potrebbe
differire leggermente da sistema a sistema). Premesso ciò, è utile conoscere lo scopo e l’effetto almeno
di quelle poche regolazioni che sono generalmente
disponibili, con lo stesso significato, su quasi tutti
i BIOS più diffusi, e che agiscono sull’attivazione e
assegnazione di risorse di sistema relative alle sue
funzioni di I/O.
L’impostazione APIC Mode, innanzitutto. Abbiamo già parlato dell’importante funzione di questo
componente per migliorare le capacità di I/O del
PC. In certe situazioni però potrebbe esserci ragione per escluderlo. In questo caso, selezionare Disable (la funzione si trova in genere nell’area Advanced
BIOS Features).
Onboard Parallel Port è una impostazione che si
trova generalmente nella sezione Integrated Peripherals e si usa per abilitare o disabilitare la porta parallela integrata sulla motherboard. In più, con questa opzione è quasi sempre possibile scegliere quale
indirizzo di I/O e quale IRQ attribuire alla circuiteria
che gestisce tale porta.
La funzione ECP Mode Use DMA controlla quale
dei canali DMA può essere usato dalla porta parallela quando questa è impostata nella modalità accelerata ECP (Enhanced Capability Port). In questa modalità infatti si può raggiungere una velocità
di trasferimento di 1 Mbps, un valore assai basso
per gli standard attuali (una porta USB 2.0 opera a
480 Mbps), ma che comunque rende già vantaggioso l’uso di un meccanismo DMA per il trasferimento dati.
La sezione PnP/PCI Configuration è presente su
molti BIOS e dà accesso alle regolazioni concernenti
in modo specifico il bus PCI e le periferiche Plug and
Play che si attestano su di esso. Regolazioni che sono spesso presenti in questa sezione sono:
• Reset configuration data: ha l’effetto di “far dimenticare” al sistema le regolazioni IRQ, DMA e I/
O address che in precedenza erano state automaticamente determinate dalla logica Plug and Play
per ciascuna periferica PCI. Di conseguenza, al
prossimo riavvio l’intera procedura sarà ripetuta
e, se nel frattempo sarà cambiato qualcosa nella
configurazione del sistema, i risultati potranno
essere diversi e risolvere (o provocare…) even-
PC Open 55 www.pcopen.it
Fig. 21Nella
visualizzazione Risorse
per tipo è possibile
vedere le assegnazioni
relative a DMA, indirizzi I/
O, IRQ e aree di memoria,
per ciascuna periferica. I
dettagli vengono mostrati
espandendo i nodi
dell’albero.
1.7.2.2 Essere in
grado di modificare
l’assegnazione delle
risorse di base del
sistema
IT administrator - Hardware
tuali problemi. Questa opzione dovrebbe essere
usata soltanto se la logica automatica non fosse
riuscita a raggiungere autonomamente le regolazioni ottimali.
• Plug and Play OS: selezionando Yes, si consente
al sistema automatico, sotto la supervisione del
sistema operativo, di scegliere ed assegnare le risorse alle periferiche.
Scegliendo No si dovrà procedere manualmente
alla loro impostazione, anche per le periferiche
necessarie per l’avvio del sistema.
Questo significa che un errore in queste regolazioni può provocare malfunzionamenti o l’impossibilità di avviare il PC: in tal caso si dovrà tornare
nel BIOS e ripristinare la modalità automatica.
• “IRQ n assigned to..”: questo gruppo di opzioni, con n variabile, consente di stabilire per ogni
IRQ se ne debba essere concesso l’uso per i dispositivi PCI Plug and Play (impostazione PCI
Device), oppure se debba essere riservato alle
vecchie schede non Plug-and-Play su bus ISA,
che potrebbero avere restrizioni sugli IRQ utilizzabili e magari richiedere che il proprio IRQ non
sia condiviso con altre periferiche (impostazione Reserved).
• PCI IDE Bus Master: consente di stabilire se per
la comunicazione con memorie di massa IDE (dischi e unità ottiche) il controller possa far uso del
bus mastering.
A meno che qualche malfunzionamento del sistema non sia attribuibile con certezza a questa funzione, è sempre preferibile abilitarla per non degradare le prestazioni.
1.7.2.3 Essere in
grado di configurare
l’assegnazione delle
risorse di base del
sistema per il nuovo
Fig. 22: Se una periferica
impiega risorse di
sistema (DMA, IRQ,
I/O, spazio di memoria)
sussiste il rischio che per
tali risorse essa abbia
a competere con altre
periferiche, magari per
imperfetta configurazione
di una di esse. Windows
verifica se ciò accade e in
caso contrario visualizza
il messaggio Nessun
conflitto nella scheda
Risorse.
Essere in grado di configurare l’assegnazione
delle risorse di base del sistema per il nuovo
hardware
Come già accennato, se lasciato libero di assegnare le risorse alle periferiche, Windows effettua
in autonomia tutte le regolazioni necessarie per il
funzionamento delle periferiche Plug and Play. Da
BIOS, come abbiamo mostrato, è inoltre possibile
intervenire in modo da forzare la scelta di un IRQ
particolare per una periferica non PnP, nonché disattivare completamente il sistema automatico. Dall’ambiente Windows è infine disponibile un’interfaccia amministrativa che, nei limiti consentiti dalle
periferiche che lo prevedono, permette di impostare manualmente le risorse di sistema “contraddicendo” le scelte spontanee del sistema operativo.
Questa tecnica è da considerarsi complementare rispetto a quelle appena presentate riguardo al BIOS,
in quanto se una o più periferiche sono escluse dal
campo d’azione del meccanismo di configurazione
automatica, anche il sistema operativo deve esserne
informato, al pari del BIOS, con cui esso “collabora”.
Vediamo come.
Selezionando una voce dall’elenco della finestra
Gestione Periferiche è possibile accedere alla finestra Proprietà, in cui, nella scheda Risorse (che è presente solo per le periferiche che fanno uso di risorse
di sistema dei tipi sopra elencati), Windows indica il
riepilogo delle risorse IRQ, I/O, DMA e Memoria impiegate dalla periferica selezionata e aggiunge un’indicazione Nessun conflitto qualora non sia rilevato
alcun conflitto di risorse (figura 22).
Si noti che due periferiche possono condividere
lo stesso IRQ senza che venga indicato, per esse, un
conflitto di risorse: la condivisione di un IRQ, se im-
PC Open 56 www.pcopen.it
Lezione 4
postata in modo ragionato, non rappresenta automaticamente una causa certa di malfunzionamenti,
ma è gestibile dal sistema operativo.
Per alcune periferiche non gestite dal sistema
Plug and Play, Windows consente inoltre di deselezionare la casella Utilizza impostazioni automatiche e di impostare manualmente indirizzi e IRQ. In
questo caso l’utente si assume inoltre la responsabilità di:
• riconfigurare fisicamente la periferica, se necessario, per riflettere le nuove impostazioni;
• assicurare che non vi siano conflitti di risorse con
una qualunque delle altre periferiche;
• riconfigurare il driver della periferica per informarlo che le risorse per comunicare con essa sono cambiate rispetto all’impostazione precedente: se infatti il driver continuasse a “cercare” la
periferica al vecchio indirizzo, al quale essa non
è più presente (o addirittura potrebbero ora essere presenti altre periferiche sugli stessi indirizzi), le conseguenze sarebbero serie e si potrebbe
arrivare al blocco del sistema.
Oltre alla modifica delle impostazioni relative alle
risorse di sistema associate ad una periferica, che è
operazione sempre più infrequente dato che la quasi totalità delle periferiche oggi impiegate sui PC è
di tipo Plug and Play, molte periferiche rendono disponibili delle impostazioni specifiche per la periferica stessa, che non riguardano risorse di sistema
ma che regolano il funzionamento del dispositivo e
del suo driver. A titolo di esempio, per una scheda di
rete si può trattare dell’indirizzo fisico di rete (MAC
address); per un mouse, impostazioni relative a risoluzione ottica, buffer d’ingresso, gestione di terzo pulsante e rotellina per lo scrolling; per un’unità
disco le opzioni possono riguardare l’abilitazione
della cache in scrittura, le partizioni e le lettere di
unità o altro. Queste regolazioni, se presenti, sono
riportate da Windows in un’apposita scheda della
finestra Proprietà: in genere si tratta della scheda
Avanzate, ma il nome può anche essere diverso (Proprietà, Criteri, Impostazioni)
22
Lezione 5
IT administrator - Hardware
Materiale didattico
progettato per EUCIP
IT Administrator
segnalato da AICA
Modulo 1 - Hardware
“AICA, Licenziataria
esclusiva in Italia
del programma
EUCIP (European
Certification
of Informatics
Professionals)
riconosce che il
materiale didattico
segnalato è
strutturato in
modo coerente con
l’organizzazione dei
contenuti prevista
dai documenti
EUCIP di riferimento.
Di conseguenza
AICA autorizza sul
presente materiale
didattico l’uso
dei marchi EUCIP
(registrato dal
CEPIS Concil
of European
Professional
Informatics
Societies) ed AICA
protetti dalle leggi
vigenti.”
1.8 Interfacce
Fig. 1-2
L’interconnessione
ad alta velocità fra
due o più componenti
dell’architettura avviene
spesso per mezzo di
un bus che può essere
interno (per esempio il
PCI) o esterno. Firewire
e USB rappresentano
due esempi di bus
esterni (seriali)
Fig. 3-4 Non sempre
un’interfaccia è
rappresentata da
un punto di contatto
fisico fra due oggetti
solidi. Alcune
interfacce di larga
diffusione utilizzano la
comunicazione radio.
È il caso del Bluetooth
e del nuovissimo
Wireless USB
Fig. 5 Fra le soluzioni
wireless, accanto
ai sistemi basati
su tecnologie radio
esistono anche
interfacce ottiche.
Nel campo dei PC
l’esempio è la porta a
raggi infrarossi IrDA
A scuola con PC Open
Interfacce
di connessione
Da quelle interne EIDE, SATA E SCSI, utilizzate per
dischi fissi e dispositivi ottici alla scheda madre, a
quelle esterne come USB, l’interfaccia più utilizzata al
momento, a Firewire. Con un occhio ai futuri sviluppi che
passeranno per il wireless di Marco Mussini
N
ella quarta lezione abbiamo constatato che la
questione dell’interconnessione fra le parti costitutive del PC riveste grande importanza non
soltanto per rendere possibile un corretto funzionamento del sistema, ma anche per determinare il livello generale di prestazioni. A questo scopo, come
abbiamo visto, sulle direttrici principali di collegamento, quelle cioè su cui viaggia la maggior parte dei
dati scambiati all’interno del computer, lavorano dei
canali di comunicazione ad alta capacità, i bus. Troviamo dei bus, infatti, fra CPU e memoria e fra Southbridge e le periferiche interne come le schede PCI;
tecnicamente si può parlare inoltre di bus esterni, come il FireWire 1-2
o l’USB (figura 1/2).
Al di là del caso specifico dei
bus, comunque, ogni interconnessione rappresenta il punto di contatto (interfaccia) fra due unità diverse che al loro
interno possono funzionare in modi anche del tutto
diversi. Compito dell’interfaccia è mettere in comunicazione questi due “mondi” in una modalità ben
definita, in modo che ognuna delle parti in causa sappia come fare per trasmettere dati e sappia che cosa
aspettarsi quando ne deve ricevere.
La definizione di uno standard di interfaccia riguarda molteplici aspetti:
Calendario delle lezioni
Lez. 1: la scheda madre e il BIOS
Lez. 2: i processori
Lez. 3: la RAM
Lez. 4: bus e risorse di sistema
Lez. 5: interfacce
Lez. 6: memorie di massa
Lez. 7: i monitor e le schede grafiche
Lez. 8: le stampanti
Lez. 9: hardware di rete
In collaborazione con
Lez. 10: alimentatori
e installazione nuovo
hardware
Lez. 11: risoluzione dei
problemi
PDF DEL CORSO
NEL DVD
3-4
• aspetti elettrici: tensioni
da usare per rappresentare zeri e uni, tensioni di alimentazione, massa, livello
di isolamento, ecc.; per i
cavi di collegamento esistono anche aspetti magnetici, come la schermatura di cavi e connettori,
l’interposizione di nuclei di ferrite per la riduzione
delle interferenze, e così via.
• aspetti elettromagnetici: per le interfacce radio come il Bluetooth (figura 3) o il futuro Wireless USB
(figura 4), il mezzo di comunicazione è l’etere invece del rame. È necessario precisare la banda di
frequenze da impiegare, la canalizzazione attuata
al suo interno, il tipo di modulazione radio, le tecniche di riduzione dei disturbi, la potenza di emissione radio, il tipo di antenna, ecc.
• aspetti ottici (per le interfacce ottiche “informatiche”, come l’in5
frarosso IrDA
(figura 5), o le
uscite ottiche
dei dispositivi
audio digitali):
lunghezza d’onda della luce
da usare, durata degli impulsi
luminosi, e così
via.
• aspetti meccanici e geometrici:
tipo, forma e dimensione dei connettori maschio
e femmina; significato di ciascun pin del connettore; sistemi di ritegno; lunghezza massima dei cavi
di collegamento.
• aspetti temporali: frequenze di lavoro, tempi d’attesa fra due segnali, durate minime e massime dei
segnali stessi, latenze massime ammissibili prima
che venga fornita risposta ai comandi, ecc.
• aspetti logici: modalità di rappresentazione di comandi e dati sotto forma di segnali elettrici oppure
ottici; significato dei comandi, loro effetto atteso,
possibili risposte;
• aspetti pratici, spesso con implicazioni logiche,
elettriche e meccaniche: un esempio è la questione della possibilità di collegare e scollegare il con-
Lezione 5
6
IT administrator - Hardware
recente (2003), l’introduzione del nuovo tipo di connessione Serial ATA (S-ATA), la cui caratteristica distintiva consiste nel cablaggio seriale anziché parallelo, ha suggerito di ribattezzare EIDE come “Parallel
ATA” (P-ATA) per meglio distinguere le due varianti di
questa interfaccia.
Distinguere le differenti interfacce.
nettore anche durante il funzionamento, a dispositivi accesi (hot plug): Ethernet e porte seriali lo
consentono; USB lo consente a livello elettrico ma
richiede cautela dal punto di vista logico (rimozione sicura dell’hardware); PCI e IDE non prevedono
mai questa possibilità (figura 6).
Le interfacce di cui parleremo in questa lezione e
nella prossima puntata riguardano l’ambito delle memorie di massa (Parallel e Serial ATA e SCSI), nonché
le periferiche USB e FireWire, i dispositivi a collegamento wireless mediante infrarossi e Bluetooth, le
schede di memoria e i controller RAID.
Interfaccia ATA Parallela (PATA)
Una particolare interfaccia di grande importanza
in qualunque sistema PC, sia esso server, desktop o
portatile, è quella che mette in comunicazione il bus
di sistema con uno o più hard disk interni. Salvo casi
rarissimi, infatti, ogni PC è equipaggiato con almeno
un disco fisso incorporato che assolve a una funzione di basilare importanza visto che sul disco sono
memorizzati il sistema operativo, i programmi, le impostazioni di sistema, i driver di tutte le periferiche
e di solito anche gran parte dei dati e degli eventuali
contenuti multimediali.
7
L’interfaccia di
collegamento per
hard disk e altre
memorie di massa
interne di gran lunga più diffusa sul
parco PC installato
nel mondo è l’interfaccia oggi nota come Parallel ATA (figura 7).
Inizialmente introdotta verso la fine degli anni ’80 con la denominazione AT Bus o AT Attachment (ATA), in virtù dello
stretto legame con i segnali del bus ISA tipico dei vecchi PC AT, questa interfaccia fu ben presto ribattezzata IDE (Intelligent Drive Electronics) per sottolineare
il fatto che la maggior parte della circuiteria logica di
controllo non risiedeva a bordo di una scheda inserita in uno slot del bus, ma direttamente a bordo dell’unità disco. L’installazione consisteva così nel semplice collegamento di un singolo cavo fra il disco e un
apposito connettore: quest’ultimo era inizialmente
ospitato da una scheda sul bus e ben presto integrato
direttamente sulla motherboard per ridurre il numero di slot occupati. Una successiva evoluzione dello
standard, introdotta per poter supportare dischi di
capacità più elevata, è detta EIDE (Enhanced IDE) e
ha dominato la scena per parecchi anni. In epoca più
Il connettore IDE
8
P-ATA per dischi
da 3.5” e unità ottiche da 5.25” è di
forma rettangolare
e ha 40 pin, uno dei
quali però in genere manca per aiutare a riconoscere il
verso d’inserimento corretto (in questo aiuta anche il
profilo in rilievo sul
dorso del connettore stesso) (figura 8).
Il cavo IDE è un cavo piatto a 40 conduttori, che
possono diventare 80 nel caso dell’Ultra DMA/66, in
cui per ridurre il rischio di interferenze reciproche
fra le piste parallele è previsto l’uso di un cavo in cui
i 40 segnali standard sono alternati ad altrettante linee di massa.
Lungo un cavo IDE, la cui lunghezza a rigore non
può superare i 18 pollici (46 centimetri circa), sono
generalmente installati tre connettori: uno è usato
per il collegamento alla motherboard e gli altri due
servono per collegare altrettante unità disco (master
e slave, come vedremo più avanti). Nel caso particolare di cavi IDE a 80 pin, i tre connettori sono colorati: l’estremità da collegare alla motherboard è blu, il
connettore intermedio (per il drive slave) è grigio, e
il connettore terminale (per il drive master) è nero
(figura 9).
L’alimentazione, sempre nel caso di unità 3.5” e
5.25”, è portata al drive da un cavo separato a 4 contatti (5V, 12V e due linee di massa) (figura 10).
Fig 9 - Un cavo IDE
a 80 conduttori per
Ultra DMA/66 si
caratterizza per la
coloratura differenziata
dei tre connettori. È blu
quello da collegare alla
motherboard, mentre
sono rispettivamente
grigio e nero quello per
il drive slave e master
9
Fig 10 - Un hard disk drive 3.5” con connessione IDE Ultra DMA/66
a 80 pin affiancata dal connettore Molex a 4 pin per le tensioni di
alimentazione (+5V e +12V)
10
1.8.1.1 Distinguere
le differenti
interfacce
Fig. 6 - Gli slot PCI e
AGP di una motherboard.
A differenza di porte
esterne come USB
e FireWire, questo
tipo di interfaccia è
concepito per supportare
l’installazione di
periferiche fisse,
pertanto non è prevista
la possibilità di “hot
plugging” ossia di inserire
e rimuovere le schede a
PC acceso
Fig. 8 - Un connettore a
40 contatti per interfaccia
Parallel ATA. Si notino
la mancanza di un pin
in posizione centrale
e, sul lato opposto del
connettore, la tacca di
riscontro prevista per
evitare l’inserimento al
contrario
1.8.1 Interfaccia ATA
Parallela (PATA)
Fig. 7 - L’interfaccia
Parallel ATA (P-ATA)
è stata per anni la
connessione più diffusa
per dischi fissi interni ed
ha subito una continua
evoluzione che ha
portato ad aumentarne
sempre più le prestazioni.
Quasi sempre le
motherboard offrivano
due connettori P-ATA
per gestire altrettanti
canali indipendenti. Oggi
è sempre più spesso
sostituita dalla versione
seriale, Serial ATA
(S-ATA) che offre diversi
vantaggi pratici e ottime
prestazioni
Lezione 5
IT administrator - Hardware
Definizione dell’interfaccia IDE: funzione dei contatti del connettore P-ATA
Lato superiore
Lato inferiore
Pin
Funzione
Pin
Funzione
1 (banda rossa)
Reset
2
Massa
3
Dati (bit 7)
4
Dati (bit 8)
5
Dati (bit 6)
6
Dati (bit 9)
7
Dati (bit 5)
8
Dati (bit 10)
9
Dati (bit 4)
10
Dati (bit 11)
11
Dati (bit 3)
12
Dati (bit 12)
13
Dati (bit 2)
14
Dati (bit 13)
15
Dati (bit 1)
16
Dati (bit 14)
17
Dati (bit 0)
18
Dati (bit 15)
19
Massa
20
Pin assente
21
Richiesta di DMA
22
Massa
23
Scrittura
24
Massa
25
Lettura
26
Massa
27
Canale I/O pronto
28
Linea usata per “Cable Select”
29
Richiesta DMA ricevuta
30
Massa
31
IRQ
32
Pin non collegato
33
Indirizzo (bit 1)
34
GPIO_DMA66_Detect
35
Indirizzo (bit 0)
36
Indirizzo (bit 2)
37
Chip Select 0
38
Chip Select 1
39
Activity
40
Massa
Per i dischi da 2.5” il connettore P-ATA ha la stessa forma ma proporzioni ridotte. Il numero di contatti sale a 44; i primi
40 contatti hanno lo stesso significato del connettore “full size”, mentre i 4 contatti aggiuntivi sono così definiti:
41
+5V per alimentazione controller
42
+5V per alimentazione motore
43
Massa
44
Riservato
Grazie ai contatti aggiuntivi non è più necessario il connettore separato per fornire al drive l’alimentazione necessaria al
funzionamento. Si noti anche che sparisce la tensione a 12V, in quanto il motore dei drive 2.5” è alimentato a 5V
Fig 11 - A confronto i
connettori IDE a 40 pin di
una unità 3.5” (sotto) e
a 44 pin di una unità da
2.5” (sopra). Le unità da
2.5” sono alimentate solo
a 5V e non richiedono il
connettore separato Molex.
Il connettore IDE ha però 4
pin aggiuntivi per portare
l’alimentazione al drive
1.8.1.2 Conoscere
le modalità di
funzionamento
dell’interfaccia IDE,
le relative limitazioni
e le capacità
supportate
Fig. 12 - Il BIOS dei
sistemi con interfaccia
IDE integrata prevede
sempre una schermata
di configurazione che
consente di immettere i
parametri geometrici del
disco (cilindri, testine,
settori) ed eventualmente
di abilitare il modo
LBA per indirizzare le
informazioni in modo
lineare
11
Conoscere le modalità di funzionamento
dell’interfaccia IDE e le relative limitazioni
L’interfaccia IDE originaria si è rivelata adeguata alle necessità concrete dei PC per un periodo di parecchi anni, ma col tempo, al crescere della capacità dei
dischi, apparve chiaro che, in combinazione con limitazioni dovute al BIOS dei PC, questa tecnologia soffriva di una importante restrizione concernente la massima dimensione che poteva avere un hard disk: 528
Mbytes. Per comprendere le ragioni di questo limite e
di altri limiti successivamente incontrati e risolti dalla tecnologia IDE, è necessario anticipare brevemente
qualche concetto sull’organizzazione dei dati sui dischi fissi, che approfondiremo nella lezione 6.
I dati memorizzati sul disco magnetico sono memorizzati in regioni organizzate come tante corone
concentriche (e non una pista unica a spirale, come
avviene sui dischi musicali LP o CD). Queste regioni
sono dette “cilindri” e numerate, secondo l’impostazione IDE originaria, da 0 a 65.535. Ovviamente un disco ha due facce e quindi su un cilindro si possono
registrare dati sia sulla faccia superiore sia su quella inferiore (le due facce sono servite da testine di
lettura/scrittura distinte). Inoltre un’unità disco può
contenere in realtà una pila di 2, 3 ..N dischi, in modo
tale da raddoppiare, triplicare, la capacità di memorizzazione complessiva. In questo caso il “cilindro”
si riferisce, collettivamente, all’unione dei cilindri di
pari diametro presenti su tutti i dischi fisici presenti nell’unità.
Pertanto, se i dischi sono N, le testine saranno il
doppio: 2N. Nello standard IDE le testine sono numerate da 0 a 15. Il BIOS del PC ne può indirizzare invece
256, numerate da 0 a 255. Infine, su ogni traccia sono
memorizzati diversi settori che contengono piccole
quantità di dati (512 byte ciascuno). I settori di una
traccia possono essere numerati da 1 a 255 dal punto di vista dell’IDE e da 1 a 63 dal punto di vista del
BIOS (figura 12).
A causa delle limitazioni concomitanti della tecnologia IDE e soprattutto del BIOS, negli anni si incontrarono varie “barriere” alla capacità massima
gestibile per un’unità disco: fra le principali, dovute
ai più disparati motivi, che hanno a lungo tormentato utenti e integratori, ricordiamo dapprima quella di
504 megabytes (circa 528 milioni di bytes), poi la successiva di 7.875 Gigabytes (circa 8.4 miliardi di bytes)
e infine quella di 127.5 Gigabytes (circa 137 miliardi di
12
Lezione 5
IT administrator - Hardware
Tabella 1. Le revisioni dello standard ATA/ATAPI
Anno di
Velocità di
Massima
Modalità di
Nome formalizzazione
trasferimento capacità disco
trasferimento
dello standard
massima (MB/s) indirizzabile
ATA-1
1994 (*)
PIO 0,1, 2
8.3
ATA-2
1996
ATA-3
1997
ATA-4
1998
Ultra DMA/33
33.3
ATA-5
2000
Ultra DMA/66
66.6
ATA-6
2002
Ultra DMA/100
100
ATA-7
2005
Ultra DMA/133;
S-ATA/150
133 (P-ATA);
150 (S-ATA)
ATA-8
PIO 3,4
16.6
16.6
Standard in corso di definizione
bytes). Quest’ultimo limite è stato superato con decisione con l’introduzione del nuovo indirizzamento
LBA (Logical Block Addressing) a 48 bit che permette di gestire dischi dalla capacità di oltre 134 milioni
di gigabyte (!). In precedenza le contromosse consistettero essenzialmente nell’introduzione di accorgimenti più o meno astuti, che hanno richiesto vari
aggiornamenti dei BIOS e dello standard IDE creando
complicate situazioni di compatibilità dovute al particolare accostamento fra motherboard (o controller
IDE) e unità disco.
Differenti implementazioni dello standard IDE,
dalle specifiche ATA e DMA/Ultra DMA
I principali passi evolutivi che hanno segnato la
storia dello standard ATA sono stati otto e hanno riguardato vari aspetti di questa tecnologia: dal tipo
di cablaggio (prima parallelo, da 40 a 80 pin, e poi seriale) al sistema di indirizzamento (dal “geometrico”
CHS al “lineare” LBA a 28 e a 48 bit), dal supporto a
periferiche di tipo diverso dall’hard disk (CD ROM e
unità a nastro) fino al recentissimo concetto di “disco ibrido” che dovrebbe giocare un ruolo importante in Windows Vista. La tabella 1 riassume per sommi
capi le innovazioni via via introdotte. Si noti che le
estensioni introdotte a partire dalla versione 4 dello standard per poter gestire anche drive CD-ROM e
DVD-ROM, drive Zip (figura 13) e SuperDisk e unità di
backup a cassette di nastro vanno sotto il nome di AT
Attachment Packet Interface (ATAPI) e per questo, a
partire dalla versione 4, gli acronimi ATA e ATAPI sono spesso usati come sinonimi.
Nella tabella a fianco sono riportate le modalità
di trasferimento dati supportate dalle varie versioni
di ATA. Data l’importanza di un efficiente meccanismo di comunicazione fra host e drive, questa è stata un’area di continuo miglioramento per la ricerca
di prestazioni sempre maggiori: non a caso praticamente ogni revisione dello standard ATA ha introdotto una o più nuove modalità di trasferimento. Due
le “famiglie” fondamentali: l’ormai obsoleta PIO (I/O
sotto controllo di programma: Programmed Input/
Output) e la più efficiente DMA (accesso diretto alla
memoria: Direct Memory Access) in tutte le sue numerose varianti sempre più veloci. Sia PIO sia DMA
rispondono all’esigenza di trasferire in memoria centrale i dati che il disco rende disponibili (in lettura)
o, viceversa, di far pervenire al disco i dati da leggere
(in scrittura), tuttavia ciò avviene in due modi completamente diversi. Consideriamo per semplicità il
Principali innovazioni
Supporto per indirizzamento lineare (LBA)
a 28 bit
Supporto
per
sistema
di autodiagnosi
Circa 137
S.M.A.R.T.
miliardi di byte
Supporto ATAPI per periferiche diverse da
hard disk (per es. drive CD ROM e unità di
backup a nastro)
Nuovo cablaggio a 80 conduttori
Indirizzamento LBA portato a 48 bit per
una maggiore capacità.
Circa 144 milioni
di miliardi di byte
S-ATA 1.0
Tab. 1 - (*): lo standard
AT/Bus – IDE era stato
introdotto fin dalla
fine degli anni ’80 dal
produttore di dischi
Western Digital. La
prima versione dello
standard ATA, uscita
alcuni anni dopo, ne
rappresentò la “ratifica”
da parte dell’ANSI
(l’istituto americano
di standardizzazione),
facendone a tutti gli
effetti uno standard non
proprietario. Da allora
in poi le successive
revisioni furono tutte
pubblicate dall’ANSI.
Definizione delle proprietà che devono
caratterizzare un drive ibrido (hard disk
abbinato a flash memory)
solo caso della lettura. Quan- 13
do il trasferimento dati avviene con la tecnica PIO, i dati in
arrivo dal disco vengono letti uno ad uno via bus ad opera di un programma che gira
sulla CPU. Questa, quando è
impegnata durante il trasferimento, deve temporaneamente sospendere l’esecuzione dei
programmi.
Quando invece si impiega una tecnica DMA, viene
consentito al controller IDE di scrivere i dati direttamente in un’apposita area della memoria di sistema,
senza l’intervento della CPU. Ci si limiterà a informare il sistema operativo quando il processo di trasferimento sarà stato completato.
Anche se le modalità DMA più primitive risultano
più lente, dal punto di vista della velocità di trasferimento dati, di alcune modalità PIO, è evidente che
nella modalità PIO la CPU viene impegnata molto di
più che nella modalità DMA; l’effetto è un rallentamento dell’esecuzione delle applicazioni, in quanto i
numerosi cicli da essa spesi ad eseguire banali istruzioni di I/O non possono essere utilmente impiegati
per eseguire i programmi che l’utente sta usando.
Questa è la ragione per cui la tecnica PIO, dopo una
fase iniziale, non ha più subito evoluzioni, ed è stata di fatto soppiantata dalla modalità DMA in tutte le
Tab. 2. Modalità di trasferimento dati PIO e DMA
Nome
Single Word DMA 0
PIO Mode 0
Single Word DMA 1
Multi Word DMA 0
PIO Mode 1
Single Word DMA 2
PIO Mode 2
Multi Word DMA 1
Multi Word DMA 2
Ultra DMA 0
Ultra DMA 1
Ultra DMA 2 (“Ultra DMA/33”)
Ultra DMA 3
Ultra DMA 4 (“Ultra DMA/66”)
Ultra DMA 5 (“Ultra DMA/100”)
Ultra DMA 6 (“Ultra DMA/133”)
Max vel. trasf. (MB/s)
2.1
3.3
4.2
4.2
5.2
8.3
8.3
13.3
16.6
16.6
25
33.3
44.4
66.6
100
133.3
Fig. 13 - Fra le periferiche
che era possibile
collegare all’interfaccia
IDE vi erano anche i
drive ZIP (nella versione
interna), in grado di
raggiungere 100 MB
di capacità su dischi
rimovibili.
1.8.1.3 Conoscere
le differenti
implementazioni
dello standard IDE,
dalle specifiche ATA e
DMA/Ultra DMA
Lezione 5
IT administrator - Hardware
Fig. 14 - I dischi ad alte
prestazioni per server,
come questo Seagate
Cheetah, possono
raggiungere velocità di
rotazione di ben 15.000
RPM. I dischi IDE per
PC desktop di norma
si fermano a 7.200
RPM, mentre velocità
ancora inferiori, anche
per ragioni di consumo
elettrico e resistenza a
urti e scossoni, sono
adottate nei laptop
1.8.1.4 Capire
l’accezione dei
termini: canali
IDE Primario e IDE
Secondario, Master
e Slave
Fig. 15 - Un apposito
jumper permette di
stabilire la modalità
assegnata al disco
sue varianti. Le velocità di trasferimento delle varie
modalità PIO e DMA via via introdotte sono riportate nella tabella 2.
14
Velocità teoriche limitate dal disco
È importante comprendere che, sebbene le velocità di trasferimento più elevate indicate in tabella siano pienamente supportate dall’interfaccia e di conseguenza siano tecnicamente raggiungibili nella realtà, l’unità disco (almeno con le attuali tecnologie PC)
non è mai sufficientemente veloce per sostenere per
lunghi periodi flussi di dati di questa intensità. Solo
quando una porzione dei dati da trasferire è già stata
letta dal disco e si trova in attesa nella cache memory
integrata sul controller IDE del drive tale porzione
può essere trasferita alla massima velocità permessa
dall’interfaccia ATA. Una volta trasferito (ad alta velocità) il contenuto della cache, tuttavia, sarà necessario attendere che vengano letti dal disco (a velocità assai inferiore) altri dati per prepararsi ad un altro
ciclo. I valori in tabella sono quindi da intendersi come valori di picco, riferiti al trasferimento di dati già
pronti nella cache dell’unità disco e in attesa di essere prelevati. La velocità media, nel trasferimento di
grandi quantità di dati, è tipicamente molto inferiore
non a causa di inefficienze del canale di comunicazione IDE, ma per la lentezza intrinseca del disco, la
fonte primaria dei dati. Infatti, una volta trascorso il
tempo necessario per posizionare la testina sul cilindro giusto e per attendere che la rotazione del disco
abbia portato il settore desiderato sotto la testina
stessa, inizia la fase di lettura, durante la quale i dati
passano sotto la testina a una velocità dipendente da
quanto velocemente ruota il disco. Per quest’ultimo
problema, negli anni, si è agito sulla velocità di rotazione del disco, che è passata via via da 4.200 a 5.400,
7.200, 10.000 e perfino 15.000 giri al minuto.
Oggi i PC desktop impiegano generalmente dischi
da 7.200 giri/minuto, mentre sui laptop, anche per ragioni di risparmio energetico, rumorosità e affidabilità, è prevalente l’uso di unità da 4.200 o 5.400 giri/minuto; unità da 10.000 o 15.000 giri/minuto sono generalmente usate sui server e per questo, in ogni “epoca”, la massima velocità è tradizionalmente riservata
ai dischi SCSI (figura 14). Anche l’aumento della densità superficiale delle informazioni sul disco, che è
stato perseguito essenzialmente per ottenere un aumento di capacità, ha avuto un effetto positivo sulle
prestazioni in quanto una traccia viene a contenere
più settori; pertanto, in un giro completo del disco,
la testina di lettura leggerà più dati e di conseguenza
a parità di velocità di rotazione del disco il flusso di
dati letti sarà più intenso.
Differenze tra IDE Primario e IDE Secondario,
Master e Slave
Nella stragrande maggioranza delle motherboard
con controller IDE P-ATA integrato, soprattutto se
non è contemporaneamente presente anche un controller di altro tipo come un S-ATA, sono disponibili
due connessioni P-ATA, ognuna delle quali gestisce
un “canale” indipendente. I due connettori sono solitamente indicati sulla motherboard dalla scritta IDE0 e IDE-1; i canali da essi gestiti sono detti rispettivamente Canale IDE Primario e Canale IDE Secondario.
Sul connettore di ogni canale può attestarsi un cavo
IDE sul quale, come già accennato, possono essere
presenti uno o due connettori per unità disco. Se i
connettori sono due è necessario distinguere chiaramente i due dispositivi collegati. Tecnicamente i due
dispositivi sono identificati come device 0 e device
1, ma è invalso l’uso dei più familiari termini master
e slave. Questa denominazione, tuttavia, può essere
fuorviante, in quanto suggerisce che il primo svolga
funzioni di controllo sul secondo, oppure che il primo sia in qualche misura privilegiato rispetto al secondo in termini di priorità e quindi di prestazioni.
In realtà non è così: non è il “master” a controllare lo
“slave”, ma entrambi i dispositivi sono asserviti al
controller del canale IDE a cui sono collegati.
Poiché comunque il BIOS, quando all’accensione effettua una scansione dei canali IDE per rilevare eventuali unità disco, scandisce prima il canale 0
del canale 1 e nell’ambito di ogni canale solitamente
riconosce per primo il dispositivo primario, il ruolo
e il canale attribuiti a ciascuna unità disco hanno rilevanza ai fini dell’assegnazione delle lettere di unità
da parte di Windows. Risulta così spontaneo collegare il disco fisso “principale”, quello su cui si intende installare il sistema operativo, come unità master
del canale 0, mentre le unità ottiche vengono di solito collegate come slave, oppure anche come master,
ma del canale secondario.
L’impostazione del ruolo master o slave in un dispositivo IDE si effettua agendo su appositi permutatori (di solito fisicamente realizzati come dei minuscoli ponticelli, o “jumper”) che a seconda della
posizione assunta sulla contattiera stabiliscono che
il disco funzionerà come device 0 o come device 1
(figura 15). Esiste tuttavia una terza possibilità, detta
cable select (CS), in cui il ruolo del dispositivo non è
stabilito dalla posizione dei jumper di configurazione, ma dalla scelta di collegarlo al primo o al secondo
connettore lungo il cavo IDE. I due connettori hanno
spesso colori differenti per aiutare a distinguerli, ma
in genere (su cavi a 40 conduttori) quello master è il
connettore intermedio, mentre quello slave è quello posizionato all’estremità del cavo. Questo perché
l’accorgimento tecnico usato per differenziare i due
connettori consiste
15
nell’interruzione,
a valle del connettore mediano, della pista che serve il
pin 28. Questo, come mostrato in tabella 0, è il pin di
controllo del sistema Cable Select. Se
il disco è collegato
al connettore intermedio, il pin 28
è collegato al con-
Lezione 5
troller IDE, che a sua volta lo collega a massa: questa situazione è automaticamente inerpretata come
“device 0” (master). Se il disco è invece collegato al
connettore periferico, il pin 28 non è connesso, in virtù dell’interruzione praticata sul relativo conduttore
a valle del connettore mediano. Il disco interpreta
quindi questa situazione come device 1 (slave). Sui
cavi IDE a 80 pin la posizione dei connettori master
e slave in modalità cable select è invece invertita.
Questa configurazione rende più semplice effettuare spostamenti di unità disco, in quanto non occorre
più toccare i jumper (spesso scomodi da estrarre e
reinserire, senza contare che è davvero facile smarrirli durante l’operazione..), ma basta semplicemente
collegare i dischi al cavo IDE nella posizione voluta.
Lo svantaggio sta nel fatto che il connettore master
e quello slave sono in posizioni prestabilite sul cavo
e non è possibile invertirle; potrebbe quindi risultare difficile collocare i dispositivi nelle posizioni fisiche volute, e al tempo stesso assegnare loro il ruolo
desiderato, se la tecnica di configurazione usata è il
“cable select”. In caso di difficoltà si potrà quindi ritornare alla classica tecnica dei jumper e collegare le
unità disco ai connettori più comodi.
Sapere quanti dispositivi IDE possono
essere supportati
Tradizionalmente le motherboard per PC integravano un singolo controller IDE con supporto per due
canali e ogni canale gestisce fino a due dispositivi. In
questo caso il massimo numero di unità disco IDE gestibili è pari a 4. Tuttavia questa configurazione “classica” è sempre più desueta; i modelli più recenti affiancano al classico IDE P-ATA la più moderna e pratica soluzione S-ATA e in questo caso il numero di canali
può variare. Per esempio, potrebbero essere presenti
un singolo canale IDE P-ATA e 4 canali S-ATA. Come si
vedrà, però, ogni canale IDE S-ATA supporta un singolo dispositivo e non due come nel caso P-ATA (figura
16). In definitiva il numero totale di dispositivi gestibili può variare a seconda del tipo di controller usato
(se è esclusivamente P-ATA si può senz’altro dire che
il numero di dispositivi gestibili di questo tipo sarà
pari) e delle scelte di configurazione del produttore
della motherboard, che tenderà sempre più a proporre un mix fra canali P-ATA e S-ATA con una progressiva
prevalenza, negli anni a venire, del secondo standard
rispetto al primo.
Interfaccia SCSI
Un’interfaccia che negli ultimi 10 anni circa ha incontrato notevole successo soprattutto nel mondo
16
IT administrator - Hardware
delle work- 17
station e dei
server per il
collegamento di periferiche particolarmente esigenti in fatto di banda,
quali le unità
di memoria
di massa ad alte pre- 18
stazioni, è la cosiddetta SCSI (Small Computer Systems Interface),
che ha dato luogo, nel
tempo, a un ventaglio
di versioni sempre più
evolute e veloci dello
standard, come vedremo fra poco. Va comunque ricordato che in effetti la tecnologia SCSI ha trovato almeno un campo d’impiego anche in ambito PC: infatti, almeno fino all’avvento delle porte USB 2.0, l’unico
modo non proprietario ed economicamente praticabile per collegare a un PC uno scanner veloce e ad alta risoluzione era proprio l’interfaccia SCSI, capace di
assicurare prestazioni ben superiori rispetto a quelle
di USB 1.1 e a maggior ragione, prima di quest’ultima,
anche rispetto a quelle di una porta parallela (seppure del tipo accelerato EPP o ECP).
Le principali differenze operative esistenti fra SCSI
e P-ATA si possono così riassumere:
• P-ATA è destinata a connessioni interne e su breve
distanza mentre SCSI è utilizzabile anche e soprattutto per connessioni esterne (figura 17) su distanze anche dell’ordine dei metri e più;
• SCSI prevede un vero e proprio linguaggio di comando con cui l’initiator (il controller montato sul
PC) può inviare al target (l’unità disco) istruzioni
sul da farsi: sono definiti oltre 50 comandi per leggere e scrivere dati, per ispezionare lo stato o le
caratteristiche della periferica, e così via. Naturalmente l’utilizzatore non si accorge di questa complessità, in quanto è il driver che provvede a generare questi comandi.
• P-ATA utilizza solo cavi piatti (a 40 linee e, più recentemente, a 80 linee) e un connettore lineare per
cavi piatti da 40 pin (44 per unità da 2.5”). SCSI supporta invece vari tipi possibili di cablaggio (fra cui
un cablaggio a coppie intrecciate anziché a cavo
piatto) e numerosi connettori diversi. Inoltre SCSI
supporta due modalità principali di trasmissione
di segnale (single ended e differential), i dispositivi
sono collegati a mò di catena e al termine di questa
catena è richiesta l’installazione di un terminatore
elettrico che attenua i fenomeni di riflessione dei
segnali dall’estremità della catena. (Alcuni dispositivi SCSI però sono in grado di assolvere internamente a questa funzione).
• Un canale P-ATA può gestire fino a 2 dispositivi,
mentre una catena SCSI (figura 18), a seconda della versione di standard, può gestirne molti di più; i
dispositivi sono identificati da un numero univoco
e, a differenza del più semplice bus IDE, possono
avere natura composita, ossia essere costituiti da
un certo numero di sub-devices, anch’essi univocamente identificati.
Capire l’accezione dei termini: Host Adapter,
identificativo SCSI (SCSI ID), LUN, terminatore
Una catena SCSI comprende un certo numero di
Fig. 17 - Un cavo SCSI
per il collegamento di
unità esterne. A causa
della sua natura di
bus parallelo, e del
conseguente gran
numero di conduttori, un
cavo SCSI ha sempre
sezione piuttosto grossa,
è poco flessibile ed ha
costo elevato.
Fig. 18 - Più dispositivi
esterni possono essere
collegati insieme
formando una catena
SCSI che si attesta
su un’unica porta del
PC host. I dispositivi
intermedi devono avere
due porte per collegare
i cavi che li mettono in
comunicazione con i
dispositivi adiacenti
1.8.1.5 Sapere
quanti dispositivi
IDE possono essere
supportati e le
relative impostazioni
di configurazione da
BIOS
Fig. 16 - Sulle
motherboard recenti
sono presenti sia i
connettori P-ATA sia
quelli S-ATA, in quantità
variabile. Il numero di
connettori S-ATA è di
solito maggiore di quelli
P-ATA
1.8.2 Interfaccia
SCSI
1.8.2.1 Conoscere
le modalità di
funzionamento
dell’interfaccia SCSI
rispetto alla PATA, e
1.8.2.2 Capire
l’accezione dei
termini: Host
Adapter, identificativo
SCSI (SCSI ID), LUN,
terminatore
Lezione 5
IT administrator - Hardware
Fig. 19 - Al controller
SCSI, che partecipa
sia alle catene interne
sia alle eventuali
catene esterne, viene
convenzionalmente
assegnato uno SCSI
ID pari a 7, il che gli
conferisce la massima
priorità
Fig. 20 - L’ultima
periferica di una
catena SCSI deve
essere corredata di un
terminatore al posto
del cavo di uscita. La
sua funzione è quella di
minimizzare le riflessioni
che il segnale altrimenti
subirebbe all’estremità
del cablaggio
Fig. 21 - Un terminatore
SCSI si presenta
esattamente come
un connettore SCSI
privo di cavo uscente
dal retro. All’interno
appositi circuiti passivi
smorzano riflessioni ed
effetti indesiderati di
propagazione sul segnale
delle varie piste collegate
ai pin.
dispositivi in comunicazione fra loro. Uno di essi è
il controller che governa la catena: nella terminologia SCSI esso è definito host adapter. A differenza di
un controller IDE che è quasi sempre integrato sulla
motherboard e lavora con una logica cablata in hardware, un controller SCSI ha a che fare con situazioni
più complesse per il maggior numero di periferiche
da gestire e per la presenza di un vero e proprio linguaggio di comando, come vedremo fra poco. Di conseguenza un host adapter SCSI lavora sempre sotto il
controllo di un apposito BIOS, distinto da quello della
motherboard: lo SCSI BIOS, che di solito può essere
aggiornabile per correggere malfunzionamenti o aggiungere nuove funzionalità. Inoltre anche il sistema
operativo, che in genere sa gestire i dischi IDE direttamente, ha sempre bisogno di un driver per gestire periferiche SCSI. Da un punto di vista firmware e
software, quindi, l’impiego di periferiche SCSI tende
a essere più complesso di una banale connessione
IDE, anche se tale maggior complessità era bilanciata, almeno in passato, dalle superiori caratteristiche
di SCSI soprattutto in termini di flessibilità d’impiego,
velocità e capacità.
Anche se esistono host adapter integrati su
motherboard, nella storia della tecnologia SCSI è
sempre stata più comune la scelta di acquistare il
controller come scheda di espansione, sia perché
la continua evoluzione dello standard avrebbe reso
presto obsolete le soluzioni integrate costringendo a
un upgrade dell’intera motherboard, sia perché i vari modelli di host adapter su scheda possono offrire
funzionalità molto variabili a seconda delle esigenze:
supporto RAID, un banco di cache dedicata più o meno grande, e così via.
In una catena di dispositivi su un bus SCSI parallelo, le varie unità devono essere identificate per mezzo di un codice univoco detto SCSI ID, che è un numero compreso fra 0 e 7 o fra 0 e 15 a seconda della
variante di SCSI (le recenti versioni seriali dello standard supportano un numero molto maggiore di unità). L’impostazione dello SCSI ID sulla periferica si fa
tradizionalmente agendo su un permutatore meccanico, che può presentarsi in varie forme: può essere
infatti costituito da una rete di jumper da riposizionare, da un banco di microswitch o anche essere realizzato come un piccolo disco girevole da far ruotare
fino alla posizione desiderata agendo con un cacciavite. Con dispositivi di impostazione più moderna,
l’ID può essere cambiato agendo dal BIOS dell’host,
oppure dal sistema operativo, usando una utility fornita dal produttore che consente di effettuare la configurazione delle periferiche.
Impostare correttamente gli ID SCSI
Una corretta impostazione degli SCSI ID delle periferiche che partecipano alla catena SCSI è essenziale
per il buon funzionamento del sistema. Se a due periferiche viene erroneamente attribuito uno SCSI ID
uguale, la conseguenza più probabile è che l’intera
catena cessi di funzionare. Problemi analoghi, del resto, si verificano su un bus P-ATA quando in uno stesso canale entrambi i dispositivi si dichiarano “master” (oppure entrambi “slave”).
All’accensione l’host adapter effettua una scansione del bus SCSI e rileva quali periferiche esistono nella catena e a quali SCSI ID corrispondono. Questa fase
si definisce spesso “discovery phase”.
Su una catena SCSI esistono delle priorità nel servire le richieste e la periferica avente la massima priorità è quella avente SCSI ID pari a 7 (in tutte le varianti SCSI). Per questa ragione, tipicamente è proprio 7
l’ID che si assegna all’host, il quale deve identificarsi
19
20
21
sulla catena al pari di tutte le periferiche gestite (figura 19).
Una periferica SCSI identificata da uno SCSI ID (per
riferirsi alla quale si usa anche l’espressione SCSI Target) può essere in realtà una periferica composita,
proprio come una webcam USB può integrare al suo
interno un microfono, una periferica video e una periferica di interazione come un pulsante di scatto, tutte
periferiche che in fase di collegamento vengono individualmente rilevate e riconosciute. Analogamente un dispositivo SCSI (“unità fisica”) può contenere
un set di sottodispositivi, detti “unità logiche”, che
devono anch’essi essere identificati in modo univoco attraverso un apposito schema di numerazione;
l’identificativo che viene loro assegnato nell’ambito
dell’unità fisica è detto Logical Unit Number (LUN).
Nel mondo SCSI il tipico esempio di configurazione
composita è quello di un array di dischi esterni che
sulla catena SCSI si presenta come una singola unità
fisica, ma al proprio interno è fisicamente costituito
da un certo numero di unità disco indipendenti che
ai fini del funzionamento e della gestione è utile poter
distinguere, cosa che si fa appunto ricorrendo a uno
schema di numerazione LUN.
Salvo casi particolari, ogni dispositivo SCSI è do-
Lezione 5
tato di due porte: una di ingresso e una di uscita. Ciò
consente di collegare in cascata le periferiche formando fisicamente la catena SCSI. Una catena SCSI
deve essere “terminata”: sul connettore di uscita dell’ultima periferica della catena deve essere installato
uno speciale dispositivo che ha lo scopo di minimizzare o sopprimere le riflessioni che il segnale elettrico subirebbe al suo arrivo a fine catena (figura 20).
Tale dispositivo è detto “terminatore SCSI”; ne esistono di vari tipi diversi (single-ended, passivo, attivo,
differenziale, nonché il tipo adattativo “forced-perfect”) e il tipo esatto da usare dipende sia dal connettore presente (che a sua volta dipende dalla variante
SCSI impiegata sulla catena) sia dal tipo di cablaggio impiegato (single-ended o differential con le sue
varianti), sia dalle caratteristiche dell’host adapter;
esistono anche terminatori “universali” (“multi-mode terminator”) in grado di realizzare la terminazione in presenza di diverse situazioni di cablaggio. Un
terminatore SCSI si presenta esteriormente come un
connettore maschio dal cui retro non esce alcun cavo (figura 21); al suo interno apposite reti elettriche
passive o attive provvedono alla chiusura dei circuiti e all’eventuale adattamento d’impedenza. Si noti
che il terminatore generalmente richiede di essere
alimentato; la tensione necessaria può arrivargli via
cavo SCSI.
Alcune periferiche SCSI possiedono la capacità di
realizzare la terminazione della catena al proprio interno, senza quindi richiedere l’installazione di un
terminatore fisico sul connettore di uscita.
Conoscere le principali tipologie dello standard
SCSI e le relative limitazioni e capacità.
La storia della dinastia di tecnologie SCSI inizia nella prima metà degli anni ’80 quando la prima versione, oggi nota come SCSI-1, lavorando su un bus ampio 8 bit ad una frequenza di 5 MHz, assicurava una
banda di 5 Mbyte/s supportando collegamenti su distanze fino a 6 metri. Il connettore era un ingombrante Centronics da 50 pin che generalmente era dotato di alette di ritegno antisfilamento. Fin dall’inizio,
inoltre, lo SCSI supportava una topologia di collegamento “a catena” di un numero massimo di 8 periferiche. All’epoca, nel campo delle interfacce standard
di sistemi microcomputer a basso costo, queste prestazioni avevano del rivoluzionario, consentendo di
collegare facilmente fino a 8 dischi esterni indipendenti, oppure una cascata di sistemi dischi RAID, oppure ancora periferiche come unità di backup a nastro o dispositivi di acquisizione immagini, il tutto
con cablaggi semplificati, su distanze non brevi, con
ottime prestazioni dal punto di vista della velocità di
trasferimento e con una buona facilità d’uso e configurazione.
Con simili premesse non stupirà che soprattutto
nel mercato dei server e delle workstation ad alte
prestazioni, in cui in particolare l’area dello storage pone sempre dei requisiti di capacità, prestazioni
ed espandibilità più severi e irrinunciabili di quanto
accada con i semplici PC, l’interfaccia SCSI ha incontrato un crescente successo, con tutto un fiorire di
interfacce e dispositivi. Ovviamente col tempo è anche cresciuta l’aspettativa di prestazioni ed espandibilità dell’utenza di questo sistema, il che ha portato alle prime importanti revisioni dello standard. La
prima ad arrivare fu la Fast SCSI, detta anche SCSI 2,
che mantenendo la larghezza del bus a 8 bit portò il
clock a 10 MHz raddoppiando esattamente la velocità
di trasferimento massima (a 10 Mbyte/s). La lunghezza massima supportata per i cavi però si ridusse della metà (nel caso single ended). Il numero dispositivi
IT administrator - Hardware
per catena rimase pari a 8.
L’altra strada per aumentare le prestazioni dello SCSI era quella di aumentare il parallelismo del
bus. Questa strategia fu proposta dallo standard Fast
Wide SCSI che propose un raddoppio della larghezza di canale da 8 a 16 bit, mantenendo il clock di 10
MHz del Fast SCSI. L’aumento della larghezza di canale richiese logicamente l’introduzione di un nuovo
connettore con un maggior numero di contatti (68
pin). Il risultato complessivo fu una banda ancora
raddoppiata, questa volta a 20 Mbyte/s. Altra novità
fu l’introduzione di uno SCSI ID a 4 bit che consentiva
di enumerare fino a 16 periferiche sulla catena, raddoppiando il precedente limite di 8 devices.
In una successiva ondata si tornò ad agire sulla
frequenza per aumentare le prestazioni. Un semplice
raddoppio del clock, da 10 a 20 MHz, applicato agli
standard Fast SCSI e Fast Wide SCSI, produsse rispettivamente le due nuove varianti Ultra SCSI (8 bit, 20
MHz, 20 Mbyte/s e 8 dispositivi per catena) e Ultra
Wide SCSI (16 bit, 20 MHz, 40 Mbyte/s e 16 dispositivi per catena).
Anche nella generazione successiva, la cosiddetta
Ultra 2, si puntò sull’aumento della frequenza di lavoro per velocizzare il canale. Nacquero così l’Ultra2
SCSI (8 bit, 40 MHz, 40 Mbyte/s e 8 dispositivi per catena) e l’Ultra2 Wide SCSI (16 bit, 40 MHz, 80 Mbyte/s
e 16 dispositivi).
A questo punto il bus SCSI parallelo a 8 bit uscì
definitivamente di scena dato che nell’ondata successiva, la Ultra3, era presente soltanto la versione a
16 bit. Lo standard Ultra3 SCSI, noto anche come Ultra160, lavorava a 40 MHz in modalità dual edge. Come nelle memorie DDR, in cui si effettuano due trasferimenti dati per ciclo di clock, ossia in occasione sia
del fronte di salita sia di quello di discesa dell’impulso di clock, l’Ultra3 SCSI effettuava 80 milioni di trasferimenti al secondo (ognuno a 16 bit) pur lavorando a una frequenza di 40 MHz. L’effetto complessivo
era quello di trasferire 32 bit, ossia 4 bytes, per ciclo
di clock, con una banda massima di 4x40=160 Mbyte/
s, da cui il soprannome Ultra160.
L’ultima frontiera del bus SCSI parallelo è rappresentata dagli standard Ultra320 SCSI (figura 22: 16 bit,
80 MHz dual-pumped, 320 Mbyte/s e 16 dispositivi
per catena) e Ultra640 SCSI in cui il clock raddoppia
ancora raggiungendo i 160 MHz (sempre dual pumped), portando a una banda di 640 Mbyte/s.
Così come nel campo IDE, tuttavia, in epoca recente è apparso evidente che l’aumento di frequenza
avrebbe potuto essere anche più rapido; il principale
ostacolo non era tanto la velocità dell’elettronica di
controllo (in grado di gestire in scioltezza anche i 160
MHz del bus Ultra640), ma le attenuazioni e interferenze a cui, a frequenze sempre più alte, andava incontro la propagazione del segnale sui cavi. Con cavi
meglio schermati e magari di struttura semplificata
si sarebbe potuto salire di frequenza in modo ancora
più deciso. L’approccio in questo caso è quello della
trasmissione seriale: anziché trasmettere 16 bit per
ciclo di clock su un cavo che deve necessariamente
affasciare un gran
numero di condut- 22
tori indipendenti,
diventando grosso,
costoso da produrre, poco flessibile e
pesante, si può raggiungere lo stesso
livello di prestazioni trasmettendo 1
bit per volta su un
1.8.2.3 Conoscere
le principali tipologie
dello standard
SCSI e le relative
limitazioni e capacità.
Fig. 22 - Un controller
Ultra320 SCSI, su bus
PCI-X, con supporto per
attestare fino a 3 catene
di cui una esterna con
connettore sul pannello
posteriore
Lezione 5
IT administrator - Hardware
Tabella riepilogativa sugli standard citati
Tipologia SCSI
SCSI-1
SCSI-2 (o “Fast SCSI”)
Fast Wide SCSI
Ultra SCSI
Ultra Wide SCSI
Ultra2 SCSI
Ultra2 Wide SCSI
Ultra3 SCSI (Ultra160)
Ultra320 SCSI
Ultra640 SCSI
SSA
SCSI over Fiber Channel
SAS
1.8.2.5 Essere in
grado di riconoscere
i diversi tipi di cavi
e connettori SCSI.
Sapere inoltre
le modalità di
connessione dei
dispositivi SCSI
1.8.2.4 Sapere
quanti dispositivi
SCSI sono supportati
in una catena SCSI,
e le relative modalità
di configurazione
Larghezza Bus Frequenza di lavoro
(bit)
(MHz)
8
5
8
10
16
10
8
20
16
20
8
40
16
40
16
40 (dual edge)
16
80 (dual edge)
16
160 (dual edge)
1
200-400
1
1000-4000
1
cavo molto più semplice ed economico, ma lavorando a frequenze sempre più alte.
Da qui la nascita di SSA (Serial Storage Architecture), una versione di SCSI che permetteva di gestire
fino a 96 dispositivi per catena, mantenendo invariati i comandi del protocollo, il concetto di numerazione dei dispositivi mediante SCSI ID e così via, ma
lavorava a 200 MHz su un bus da 1 bit; il throughput
netto era di 40 Mbyte/s e la lunghezza raggiungibile
era di ben 25 metri; in una evoluzione successiva di
questo standard il clock arriva a 400 MHz e la banda
a 80 Mbyte/s.
Un’altra linea evolutiva della filosofia SCSI seriale
si basa sulla fibra ottica (precisamente su Fiber Channel) come mezzo di comunicazione seriale ad alta velocità, bassa attenuazione e conseguentemente lunghe distanze. Le periferiche gestibili diventano 127 e
il clock di lavoro può essere di 1, 2 o 4 GHz; la banda
netta raggiunge in quest’ultimo caso i 400 Mbyte/s e
la lunghezza massima del cablaggio può arrivare perfino a distanze dell’ordine dei chilometri, a seconda
del tipo di fibra impiegata e della forma di trasmissione (monomodale o multimodale), ovviamente con
costi differenziati.
Particolarmente interessante nello scenario attuale è lo standard SAS (Serial Attached SCSI) impiegato
soprattutto per la connessione di unità di storage in
sistemi server.
Questa tecnologia supporta un numero elevatissimo di dispositivi; attraverso particolari unità dette
SAS Expanders, che funzionano da un punto di vista logico come degli hub fino a 128 porte, è possibile realizzare collegamenti con topologia “ad albero” e gestire centinaia o migliaia di dispositivi (fino
a 16.384). I cavi possono raggiungere la lunghezza di
6-8 metri e la banda, a seconda della versione di standard, ben 3 Gbit/s (corrispondenti a un throughput
netto di 300 Mbyte/s) in ciascuna direzione.
Sono supportati l’hot plug delle unità disco e, particolarità di estrema importanza, l’interoperabilità
con le diffuse unità disco S-ATA attraverso il collegamento half duplex al controller o ad appositi expander.
Sapere quanti dispositivi SCSI sono supportati
in una catena SCSI, e le relative modalità
di configurazione
Come abbiamo visto, la caratteristica saliente del-
Banda
(MB/s)
5
10
20
20
40
40
80
160
320
640
40-80
100-400
Fino a 300
Distanza
(m)
6
3-6
Pin
50
68
25
Alcuni km
6-8 m
Dispositivi
per catena
8
8
16
8
16
8
16
16
16
16
96
127
16384
la tecnologia SCSI è quella di consentire la costruzione di vere e proprie “catene” di dispositivi.
Tuttavia le numerose varianti dello standard differiscono, oltre che per larghezza di bus e frequenza
operativa, per il numero di periferiche supportate.
Nei classici bus SCSI paralleli sono supportate 8 periferiche negli standard a 8 bit e 16 periferiche in quelli
Wide, Ultra3 e Ultra320/640.
I più recenti bus seriali basati su tecnologia SCSI invece possono supportare 96 (SSA), 127 (Fibre Channel) o addirittura 16.384 periferiche (SSA).
Essere in grado di riconoscere i diversi tipi di cavi
e connettori SCSI. Sapere inoltre le modalità
di connessione dei dispositivi SCSI
Esistono vari tipi di cavi per il collegamento dei dispositivi SCSI e la scelta determina, fra l’altro, la massima distanza che sarà possibile raggiungere e il tipo
di terminatore che andrà installato sull’ultimo dispositivo della catena. Naturalmente i dispositivi lungo
la catena dovranno supportare il tipo di cablaggio
scelto ed esistono precise restrizioni all’installazione
contestuale sulla stessa catena di dispositivi adatti a
forme differenti di cablaggio.
Tutto questo evidentemente tende a rendere difficile e costoso costruire e far evolvere nel tempo un
sistema SCSI in quanto nel corso degli anni le periferiche reperibili sul mercato possono migrare verso
nuove versioni dello standard incompatibili con quelle precedenti; inoltre la gran varietà di combinazioni
protocollo-cablaggio costringe i produttori a mantenere a listino un gran numero di articoli diversi, fra i
quali si ripartirà la domanda dei clienti; la “dispersione” di catalogo che ne risulta rende difficile realizzare economie di scala paragonabili a quelle possibili
nel mondo IDE, caratterizzato da una compatibilità
all’indietro garantita praticamente sempre, nonché
da una varietà di connettori e cablaggi molto minore
rispetto a quanto avviene nel mondo SCSI.
Il problema della varietà di cavi, terminatori e dispositivi affligge anche le organizzazioni che fanno
uso di sistemi SCSI in quanto l’approvvigionamento
della componentistica (e delle scorte di accessori e
cavi) si complica e porta all’immobilizzo di un maggior capitale.
Oltre al cablaggio (single-ended o differenziale), altri fattori concorrono a rendere articolato il quadro
di compatibilità fra dispositivi e accessori SCSI, fra
Lezione 5
IT administrator - Hardware
cui il fatto che l’alimentazione per il terminatore sia
fornita via cavo oppure no, la gestione della parità e
la modalità di reset supportata (“hard” o “soft”). È
quindi di cruciale importanza verificare attentamente la scheda tecnica di un prodotto SCSI prima di procedere all’acquisto.
Il tipo più semplice di cablaggio è il cosiddetto single ended (SE), nel quale per ogni segnale trasmesso
lungo il cavo è presente un solo conduttore. Il cavo è
costituito da 25 doppini ritorti oppure (per installazioni interne) da un cavo piatto da 50 connettori. La
massima distanza raggiungibile è di 6-8 metri.
Più sofisticato il cablaggio “differential” in cui per
ogni segnale vengono trasmessi (su due connettori
distinti) un impulso positivo e un impulso negativo.
Il principale vantaggio di questa forma di trasmissione sta nella sua migliore capacità di mantenere un
segnale intelligibile nonostante le immancabili attenuazioni lungo la catena SCSI. Diventa così possibile
raggiungere distanze maggiori, anche di 25 metri.
La variante LVD (Low-voltage differential) è un cablaggio differenziale che però può essere impiegato insieme a dispositivi single-ended purchè l’host
adapter supporti tale compresenza e il terminatore
della catena sia un apposito terminatore bivalente.
La distanza raggiungibile è intermedia fra quella ottenibile con le due precedenti tecnologie.
Tabella riepilogativa cablaggi citati
Tipo cablaggio Max distanza
Single-ended
6-8 m
Differential
25 m
LVD
circa 15 m
Note
Un conduttore
singolo per linea
2 conduttori
per linea
2 conduttori
per linea
Fig.
23
24
25
• Possibilità di collegare o sostituire unità disco anche a sistema acceso (hot swapping)
• Possibilità, prevista esplicitamente, di usare l’interfaccia anche per collegare dischi esterni (in
questo caso si parla di external S-ATA o eS-ATA,
con cavi e connettori specifici).
• Possibilità di usare cavi di maggior lunghezza, fino a 1 metro per la versione interna e fino a 2 metri per eSATA
• Ottimizzazione delle sequenze di lavoro affidate alle unità a disco grazie alla tecnologia Native Command Queuing, di cui parleremo fra poco.
A differenza di P-ATA in cui a ogni canale IDE si collega un cavo che può raggiungere due unità disco, di
norma S-ATA consente il collegamento di un unico dispositivo per porta. Per collegare due dischi occorreranno due distinti cavi S-ATA e due distinti connettori
S-ATA sulla motherboard o sul controller. Se questo
in parte riduce il vantaggio del cablaggio semplificato, dall’altro assicura che le connessioni sono tutte
indipendenti ed eventuali operazioni di hot plugging
o hot swapping influenzeranno solamente l’unità disco interessata.
Inizialmente i dischi S-ATA avevano prezzi leggermente superiori a quelli delle vecchie unità P-ATA
di pari capacità e velocità. Oggi questa differenza si
è sostanzialmente annullata, anzi è prevedibile che
proprio i dischi P-ATA col tempo diventino più costosi e più difficili da reperire, vista la progressiva
affermazione del nuovo standard seriale, sempre più
presente sulle motherboard di recente concezione,
che spingerà i fabbricanti di hard disk a reindirizzare gradualmente la loro produzione verso S-ATA.
Una migrazione completa, comunque, non avverrà
certo in tempi brevi, data l’enorme base installata di
sistemi PC con controller IDE parallelo integrato su
motherboard.
Distinguere l’interfaccia SATA
Interfaccia ATA Seriale (SATA)
Come abbiamo accennato parlando della classica
interfaccia IDE parallela (P-ATA), la tendenza attuale è a favore della nuova versione seriale di questo
standard, il cosiddetto Serial ATA o S-ATA. Così come nel passaggio da SCSI parallelo a SCSI seriale, anche in questo caso il parallelismo della connessione
si riduce e per compensazione cresce la frequenza
di lavoro.
Nel complesso quest’ultima cresce a tal punto da
determinare addirittura un marcato aumento di prestazioni per quanto riguarda la banda del canale: i cablaggi semplificati consentono di dominare meglio il
problema delle interferenze e attenuazioni, permettendo così di aumentare più facilmente la frequenza.
I vantaggi principali di S-ATA rispetto al venerando standard parallelo P-ATA si possono così riepilogare:
• una semplificazione costruttiva di cablaggi e connettori, che possono passare da 40 pin a soli 7 pin
(figura 23).
• Migliore possibilità di ventilazione per l’interno
del case, dove gli ingombranti cavi piatti IDE, che
ostacolano e deviano il flusso d’aria generato dalle ventole, vengono sostituiti da sottili cavi seriali S-ATA.
• Migliori prestazioni (attualmente 150-300 Mbyte/s)
e maggior facilità di ottenere ulteriori incrementi
di banda con versioni future dello standard, aumentando la frequenza di lavoro.
Localizzare i connettori S-ATA sulla motherboard
è semplice, data la loro forma specifica.
La particolarità da tener presente è che mentre nel
caso P-ATA la dotazione classica era costituita da una
coppia di connettori a 40 pin affiancati (uno per il canale primario e uno per il secondario), a ognuno dei
quali si poteva attestare un cavo piatto con due connettori per altrettante unità disco, la nuova interfaccia seriale prevede connessioni punto-punto.
Per offrire supporto per un numero almeno equivalente di unità disco è quindi necessario un maggior numero di connessioni S-ATA su motherboard
e infatti non è infrequente trovarne 4, 6 o anche più
(rimando a figura 15).
Conoscere le modalità di funzionamento
dell’interfaccia SATA rispetto alla PATA,
e le relative differenze
Abbiamo già evidenziato come SATA funzioni con
un trasferimento di dati seriale, su singola linea ad
alta frequenza, anziché parallelo su linee multiple a
velocità più bassa.
Date le condizioni in cui avviene la trasmissione
è fondamentale che i dati da trasferire siano protetti da una codifica che ne garantisca l’integrità e che
consenta di rilevare e possibilmente correggere la
perdita accidentale di singoli bit per problemi di sincronizzazione. Per questa ragione SATA adotta una
codifica di canale che impiega 10 bit per inviare 8 bit
di informazioni effettive (ragion per cui la banda lorda di 1.5 Gbit/s si traduce in “soli” 1500/10=150 Megabyte e non in 1500/8=187.5 Mbyte/s).
1.8.3.1 Distinguere
l’interfaccia SATA
1.8.3 Interfaccia ATA
Seriale (SATA)
1.8.3.2 Conoscere
le modalità di
funzionamento
dell’interfaccia SATA
rispetto alla PATA, e
le relative differenze
Lezione 5
IT administrator - Hardware
Fig. 23 - I cavi S-ATA,
con soli 7 contatti, sono
molto meno ingombranti
e costosi dei vecchi cavi
piatti usati da P-ATA
Fig. 24 - I dischi con
interfaccia S-ATA con
i cavi di collegamento
per l’alimentazione, a
sinistra, e i dati a destra
Una peculiarità di SATA è la modalità di ottimizzazione dei comandi impartiti alle unità disco nota
come Native Command Queuing (NCQ), supportata
in alcuni recenti modelli di hard disk. Con questo sistema l’ordine dei comandi di lettura e scrittura che
il sistema operativo, attraverso bus e controller, invia all’hard disk, può venire alterato (dall’elettronica
di controllo montata sul disco) in modo tale da far sì
che i comandi siano eseguiti in un tempo minore.
Questo può accadere perché i settori che si ordina all’hard disk di leggere o scrivere potrebbero trovarsi in posizioni che la testina, per effetto della loro
posizione reciproca e della rotazione del disco, visiterebbe in una sequenza diversa da quella richiesta.
Se invece gli ordini di lettura venissero riordinati in
modo tale da assomigliare all’ordinamento “naturale” di visita, i risultati potrebbero essere forniti molto più in fretta.
È come se a un postino venisse chiesto di visitare
Bologna, Roma, Milano e Firenze in questo ordine: il
tempo impiegato sarebbe molto inferiore se l’ordine
fosse stato Milano, Bologna, Firenze, Roma. Problemi del tutto simili devono essere affrontati dai sistemi di controllo per ascensori, che devono tentare
di evitare “viaggi” inutili e continue “incertezze” nel
verso del movimento delle cabine. È precisamente di
questo tipo di ottimizzazione che si occupa il NCQ.
Tuttavia, nel riorganizzare la sequenza di ordini il
drive deve tenere conto delle eventuali scritture inframmezzate nel flusso di ordini di lettura. Infatti se
una scrittura riguarda un settore che nella sequenza,
successivamente, verrà chiesto di leggere, questa lettura dovrà evidentemente restituire il nuovo dato appena scritto. Se il riordino della sequenza di letture
e scritture portasse a eseguire la lettura prima della
scrittura anziché dopo di essa come originariamente
richiesto, il dato letto sarebbe quello vecchio e non
quello nuovo. Ciò costituirebbe un’alterazione della
semantica del disco che causerebbe immancabilmente seri problemi.
I maggiori vantaggi della modalità NCQ si hanno
quando statisticamente prevalgono nettamente le letture rispetto alle scritture e quando vi sono parecchie sequenze concomitanti di lettura di zone distinte del disco. Questo capita, per esempio, in sistemi
multitasking, con molti processi che devono accedere al disco ognuno per le proprie finalità. Poiché è
probabile che tali processi debbano leggere file diversi, i quali sono memorizzati in zone diverse del disco,
si avrebbe un flusso di richieste di lettura alquanto
“sparse” e disordinate, che senza NCQ costringerebbero la testina di lettura a riposizionarsi molto spesso cambiando cilindro e ad attendere poi che la rotazione del disco porti sotto la testina i settori richiesti:
tutti ritardi che NCQ può eliminare o ridurre al minimo possibile, sempre che non vi siano troppe richieste di scrittura in questo scenario.
Da ricordare anche un altro caso frequente, quello
dei processi che accedono “simultaneamente”, prevalentemente in lettura, a uno stesso database. Anche in questo caso le condizioni sono ideali per l’applicazione di NCQ (e ancora una volta si tratta di una
tipica applicazione server).
Indipendentemente da quanto adatte a NCQ siano
le condizioni d’uso del disco da parte di programmi e
sistema operativo, questa tecnologia ha bisogno, per
funzionare, di poter esaminare l’elenco delle prossime richieste per determinare se vi siano possibilità
di ottimizzazione.
Ovviamente si potrà procedere a riorganizzazioni tanto più precise e vantaggiose quanto più lunga
sarà stata la sequenza di richieste future esaminata.
23
24
Per questa ragione, a differenza dei normali dischi PATA (o degli stessi S-ATA, quando NCQ non sia attivo), S-ATA accetta comandi anche prima che sia terminata l’esecuzione di quelli precedenti. I nuovi comandi pervenuti vengono memorizzati in una coda
(queue) di comandi (fino a 32 per ogni richiedente)
e su questa coda appositi circuiti “ragionano” continuamente, cercando di trovare sequenze alternative
che minimizzino i movimenti meccanici di disco e
testina per la loro esecuzione: sono infatti proprio i
movimenti meccanici la causa della lentezza dei dischi fissi.
Per esempio, un disco da 7.200 giri/minuto effettua
una rotazione completa in 8.3 millisecondi; uno da
5.400 giri/min impiega 11.1 ms, mentre uno da 10.000
giri/min ne richiede solo 6.
Questi valori (detti latenze di rotazione) corrispondono al caso pessimo, che è quello in cui, anche se
la testina si trova già sul cilindro giusto, il settore richiesto è appena passato sotto di essa, per cui è necessario attendere una rotazione completa del disco
per poterlo rileggere.
Se poi il settore da leggere si trova in un altro cilindro, oltre alla latenza di rotazione deve naturalmente
essere tenuto conto della latenza dovuta al tempo necessario per spostare la testina da un cilindro all’altro. Tuttavia non si tratta di una semplice somma di
due tempi, in quanto i due movimenti (rotazione del
disco e spostamento della testina) avvengono contemporaneamente; domina quindi il tempo più lungo, che può essere l’uno o l’altro a seconda di quanti
gradi di rotazione del disco e quanti cilindri di spostamento della testina occorrano. Come si vede, una
valutazione non banale.
È compito della circuiteria di controllo dell’NCQ
calcolare una stima esatta del “costo” di ognuna delle prossime letture e l’eventuale vantaggio derivante
da ognuna delle possibili variazioni del loro ordine,
fino a trovare l’ottimo; il tutto in tempo reale, durante il funzionamento del disco, con la coda in costante movimento: le richieste in coda vengono servite e
nel frattempo dal controller ne arrivano altre a tenere
piena la coda.
IT administrator - Hardware
Materiale didattico
progettato per EUCIP
IT Administrator
segnalato da AICA
Modulo 1 - Hardware
“AICA, Licenziataria
esclusiva in Italia
del programma
EUCIP (European
Certification
of Informatics
Professionals)
riconosce che il
materiale didattico
segnalato è
strutturato in
modo coerente con
l’organizzazione dei
contenuti prevista
dai documenti
EUCIP di riferimento.
Di conseguenza
AICA autorizza sul
presente materiale
didattico l’uso
dei marchi EUCIP
(registrato dal
CEPIS Concil
of European
Professional
Informatics
Societies) ed AICA
protetti dalle leggi
vigenti.”
1.8.4 Interfaccia
USB
1- Il primo logo usato
per evidenziare i
prodotti compatibili con
l’interfaccia seriale USB.
2 - Il connettore DB-9 è
la versione più piccola
fra le due connessioni
disponibili per la porta
seriale RS-232-c.
3 - Solo un connettore
a 25 pin come il DB-25
dispone di un numero di
contatti sufficiente per
esporre tutti i contatti
teoricamente necessari
per il funzionamento
di una RS-232-C. In
pratica risulta quasi
sempre sufficiente un
sottoinsieme di contatti
compatibile con il più
compatto connettore
DB-9.
4 - Cavi seriali con
contatti collegati secondo
il cosiddetto schema
null modem e dotati di
connettori DB9 o DB25
(ma spesso entrambi)
potevano essere usati
per collegare due PC
in una sorta di rete
punto-punto sotto il
controllo di un apposito
Lezione 6
A scuola con PC Open
Interfacce di connessione
per periferiche
Passiamo ad analizzare le diverse tipologie e versioni
di USB, FireWire, IrDA e Bluetooth, che garantiscono la
connettività con e senza cavi. Quando usarle e perché
alcune sono più diffuse di altre, le loro velocità e pregi e
difetti di ognuna. di Marco Mussini
l celeberrimo Universal Serial Bus, 1
familiarmente noto come USB, è
senz’ombra di dubbio l’interfaccia esterna oggi più usata per la
connessione di periferiche di quasi
ogni genere al PC.
Oggi il suo impiego è diffusissimo e l’esistenza stessa di un’interfaccia universale e di facile uso è data
quasi per scontata, non a torto, dagli utenti finali, ma
l’importanza di aver raggiunto questo traguardo non
dovrebbe essere sottovalutata. In passato infatti la situazione è stata molto più complicata.
Per lunghi anni il retro del PC è stato popolato da
porte molto diverse, dotate di connettori spesso ingombranti e scomodi e specializzate in tipi particolari di periferiche.
• Mouse e modem esterni andavano collegati alle
porte seriali RS-232-C, che impiegavano connettori DB-9 o DB-25, rispettivamente a 9 o 25 pin (foto
2 e 3); la velocità raramente superava i 115 Kbps,
bisognava fare attenzione al tipo di dispositivi (Data Terminal Equipment, o DTE, e Data Circuit-terminating Equipment, o DCE) e al tipo di cavo (nullmodem, normale o
3
con alcuni pin collegati per simulare lo
stato attivo di alcuni
2
segnali). Con l’inter-
I
Calendario delle lezioni
Lez. 1: la scheda madre e il BIOS
Lez. 2: i processori
Lez. 3: la RAM
Lez. 4: bus e risorse di sistema
Lez. 5: interfacce (prima parte)
Lez. 6: interfacce (seconda parte)
Lez. 7: memorie di massa
Lez. 8: le stampanti e disp. di visualizzazione
Lez. 9: hardware di rete
In collaborazione con
Lez. 10: alimentatori
e installazione nuovo
hardware
Lez. 11: risoluzione dei
problemi
PDF DEL CORSO
NEL DVD
faccia RS-232-C era anche 4
possibile collegare due PC
fra loro, con specifici cavi null-modem detti “cavi
LapLink” (figura 4) dal nome del primo software a larga diffusione che supportò questa funzionalità, per trasferire dati (molto lentamente!) in una
sorta di “rete locale” punto-punto (figura 5).
Le porte seriali utilizzavano IRQ, risorsa scarsa in
un PC, e non se ne potevano quindi avere in gran
numero. La dotazione normale era di due porte:
una veniva solitamente usata per il mouse e l’altra
per il modem esterno. Eventuali porte seriali aggiuntive avrebbero usato IRQ in condivisione con
queste, a meno di configurare l’hardware diversamente.
• Dispositivi che necessitavano di una banda superiore a quella raggiungibile con le porte seriali, come stampanti, scanner, programmatori di EPROM,
alcune unità nastro e perfino alcuni primitivi hard
disk esterni, ma anche dispositivi particolari come chiavi di sicurezza anticopia per il software, interfacce joystick e perfino rudimentali interfacce
audio esterne a 8 bit, si collegavano invece all’inter- 6
faccia Centronics, poi ufficializzata come IEEE-1284:
una porta parallela che poteva trasmettere fino a 8
bit per ciclo di clock (contro il singolo bit di una por-
5
PC Open 114 Luglio/Agosto 2007
Lezione 6
7
ta seriale come la RS-232-C) ed era quindi capace
di raggiungere la “vertiginosa” velocità di 300-500
Kbps, successivamente cresciuta fino a 1-2 Mbps
grazie alle estensioni note come Enhanced Parallel Port (EPP), accelerata mediante DMA, ed Extended Capability Port (ECP); la selezione della modalità operativa si effettuava dal BIOS (figura 6).
Dovendo trasportare ben 17 connettori con schermatura collettiva, i cavi per porte parallele Centronics erano grossi, scomodi e costosi, con connettori DB-25 a 25 pin, con viti di fissaggio, lato PC, e
Centronics Amphenol a 36 pin, dalle caratteristiche alette-clip di ritegno a scatto, lato stampante o
scanner (figura 7). Anche le porte Centronics, come le seriali, necessitavano di IRQ e di una piccola
“finestra” nello spazio di I/O del computer. Normalmente tutti i PC erano dotati all’origine di una singola porta Centronics e se ne potevano aggiungere
altre usando schede di espansione.
Ogni volta che si doveva collegare una periferica
al PC bisognava chiedersi se le porte fossero di tipo
compatibile con il dispositivo, se vi fossero connettori del tipo adatto o se occorresse aggiungere qualche
porta (e, in questo caso, se vi fossero slot di espansione, IRQ e porte I/O liberi a sufficienza) e, infine, procurarsi un cavo del tipo adatto.
I connettori seriali e paralleli erano piuttosto ingombranti e sottraevano spazio prezioso specialmente sui laptop: al massimo era possibile alloggiarne
uno per tipo, limitando notevolmente le possibilità di
connessione di periferiche esterne. Questo scenario
non certo esaltante fu rivoluzionato dall’interfaccia
USB, introdotta nel 1996 (1998 per quanto riguarda
la revisione 1.1) e rapidamente diffusasi su larga scala fra i sistemi PC.
Questa nuova porta di espansione si è rivelata talmente efficace in tutte le applicazioni da avviare un
processo di “estinzione” delle normali porte seriali e parallele, che oggi è sempre più difficile trovare
nei pannelli posteriori di laptop e desktop di progettazione recente. Nel frattempo, la stessa porta USB
ha subito un’evoluzione (la revisione 2.0) che ne ha
aumentato notevolmente le prestazioni ampliandone il campo d’impiego fino a includere anche quei
dispositivi che richiedono una forte disponibilità di
banda per funzionare al meglio. Oggi troviamo porte
USB perfino su apparecchi di elettronica di consumo
come videocamere, cellulari o videoregistratori con
hard disk. Sono dotati di interfaccia USB (o più propriamente, sono alimentati via USB) anche accessori
che di informatico non hanno quasi nulla, come luci
a LED, ventilatori, caricabatterie e altro. Nel prossimo
futuro è in arrivo anche una versione wireless che dovrebbe rendere più pratica e immediata la connessione di dispositivi compatibili, mantenendo comunque
un alto livello di prestazioni.
Interfacce USB e principi di funzionamento
Un’interfaccia USB può funzionare in tre “modi”
distinti, con livelli di prestazioni e restrizioni diffe-
IT administrator - Hardware
8
renti:
• Low speed: banda
massima di 1.5 Mbps,
sufficiente soltanto per peri- 10
9
feriche dalle
modeste esigenze di trasferimento dati, quali mouse
e tastiere; teoricamente può bastare per
un adattatore Bluetooth 1.1
o 1.2 (banda massima di
circa 800 Kbps) (figura 8).
Non è previsto l’uso di cavi
staccabili, pertanto il cavo
USB, se presente, è sempre
solidale con la periferica, e
l’unico connettore presente è la spina di tipo A o
mini-A da usare per la connessione con l’host.
• Full speed: banda massima otto volte superiore,
pari a 12 Mbps; è permesso l’uso di cavi separati
dalla periferica. Questa interfaccia può bastare per
il funzionamento di adattatori Bluetooth 2.0 oppure
per adattatori WiFi 802.11b da 11 Mbps (figura 9);
non è invece adatta per masterizzatori ad alta velocità, dischi fissi esterni e lettori di schede flash
(o chiavette USB flash) ad alta velocità, in quanto,
pur risultando comunque compatibili, tali dispositivi sarebbero costretti a lavorare a velocità inferiori (spesso di molto) alle loro capacità massime.
Alcuni dispositivi estremamente esigenti in termini
di banda, come periferiche esterne di acquisizione
video, sintonizzatori TV o scanner veloci, non si
adeguano degradando le prestazioni, ma rifiutano
addirittura di funzionare se collegati a una porta
USB Full Speed.
• High speed: banda massima di 480 Mbps (pari a 60
Mbyte/s), attualmente sufficiente per tutte le applicazioni (figura 10).
È importante sottolineare che il connettore è uguale in tutti questi casi, e questo col preciso scopo di
assicurare la compatibilità, almeno a livello di cablaggio fisico, fra periferiche e host vecchi e nuovi, seppure con eventuale degrado automatico di prestazioni
(il funzionamento deve infatti avvenire alla velocità
del dispositivo più lento fra i due).
Le differenti versioni del protocollo USB
Dello standard USB sono uscite numerose revisioni, ma solo due (1.1 e 2.0) sono quelle che hanno effettivamente preso piede sul mercato trovando larghissima diffusione nei personal computer ma anche nei riproduttori multimediali, nelle fotocamere,
e così via.
La versione 1.1 è stata quella che ha
fatto conoscere lo standard, facendo 11
spuntare, di fatto, una o due porte USB
sul pannello posteriore di tutti i PC prodotti dal 1998 in poi. L’evidente praticità della nuova
interfaccia alimentò poi l’appetito per una versione
migliorata e in grado di offrire prestazioni maggiori,
e così nel 2000 arrivò la versione 2.0.
Solo le porte USB 2.0, infatti, supportano la modalità high-speed (figura 11). Le porte USB 1.1, basate su una revisione più vecchia dello standard, supportano esclusivamente le modalità low speed e full
speed. Per le migliori prestazioni, è dunque importante assicurarsi che le periferiche USB siano compatibili con la modalità high speed. Tuttavia, per il fatto
che tale modalità è stata introdotta nella revisione
PC Open 115 Luglio/Agosto 2007
programma. Il più celebre
programma di questo
tipo si chiamava LapLink,
donde l’espressione cavi
LapLink
5 - Esempio di schermata
di configurazione del
software LapLink. Il PC
che faceva da server
poteva esportare dischi
e stampanti, in una
sorta di rudimentale rete
punto-punto fra due PC.
Il sistema faceva uso di
collegamenti attestati su
porte seriali o parallele
6 - I connettori
Centronics lato
stampante non
utilizzavano dei DB25
ma degli ancor più
ingombranti Amphenol
a 36 pin. I connettori da
pannello (e quelli volanti
per i cavi prolunga) erano
dotati di due alette
metalliche da far scattare
per fissare il connettore
maschio
7 - Le porte parallele
possono funzionare in
varie modalità, più o
meno votate al traffico
bidirezionale e con
prestazioni crescenti; la
selezione si effettua dal
BIOS
8 - Una porta USB
operante in modalità
low speed (1.5 Mbps) è
sufficiente per periferiche
a bassa velocità o
tutt’al più per un dongle
Bluetooth 1.x (721 Kbps)
9 - In modalità Full speed
si raggiungono i 12 Mbps,
sufficienti per utilizzare
un dongle WiFi 802.11b
(11 Mbps).
10 - Solo la modalità
High Speed (480 Mbps)
è sufficiente per pilotare
correttamente periferiche
che necessitano di larga
banda, come un dongle
WiFi 802.11g (54 Mbps)
oppure un masterizzatore
di DVD ad alta velocità,
come un modello 18x
(oltre 20 Mbps)
1.8.4.4 Conoscere le
differenti versioni del
protocollo USB
11 - Il logo per
riconoscere le periferiche
realmente in grado di
supportare la modalità
high speed (480 Mbps)
1.8.4.1 Conoscere le
differenti interfacce
USB, i principi di
funzionamento, le
relative prestazioni e
limitazioni
IT administrator - Hardware
Fig. 12 - Le versioni A
e B del connettore USB
comprendono 4 pin (oltre
alla massa). La versione
mini invece prevede
un quinto contatto che
supporta la selezione
automatica della modalità
di funzionamento “host”
o “device” nel caso “USB
on the go”
1.8.4.2 Interfaccia
USB: connessione
fisica
2.0 dello standard, spesso si parla (impropriamente)
di “compatibilità USB 2.0”. In realtà anche un dispositivo client USB 1.1, quindi “lento”, è tecnicamente
“compatibile” con un host dotato di porte USB 2.0.
Semplicemente, tali porte verranno sottosfruttate,
in quanto, in combinazione con quel dispositivo, potranno funzionare al massimo in modalità full speed
(12 Mbps). Ma questo non è esattamente quello che
l’utente si aspetta quando cerca prodotti “compatibili con USB 2.0”.
La confusione è amplificata dal fatto che la velocità intermedia, 12 Mbps, è chiamata “full speed”
dallo standard USB 1.1, dando la falsa impressione
che sia la massima velocità raggiungibile. Ragionando col senno di poi, si potrebbe dire che un’espressione come “medium speed” sarebbe stata forse più
appropriata, ma evidentemente quando fu introdotto lo standard 1.1 non si immaginava che il successo dell’USB avrebbe presto costretto a introdurre una versione dello standard comprendente una
modalità operativa 40 volte più veloce (480 Mbps).
Quando questo accadde, si dovette quindi inventare un’espressione per identificare la nuova modalità
e la scelta cadde su “High speed”: non a tutti appare
però chiaro che “high speed” corrisponde a prestazioni molto superiori a quelle di “full speed”.
Un prodotto USB 1.1 può così ingannare l’acquirente inesperto vantando “USB 2.0 compatibility” e
“Support for USB full speed”: pur essendo tecnicamente esatte entrambe le affermazioni, non si tratta
di un prodotto capace di raggiungere la massima velocità di 480 Mbps, ma soltanto 12 Mbps, obbligando
la porta USB host 2.0 del PC a degradare le sue prestazioni di 40 volte!
Questo equivoco era piuttosto frequente nei primi
anni successivi all’introduzione delle periferiche USB
2.0, quando i fabbricanti di prodotti obsoleti non erano ancora pronti per passare alla più moderna tecnologia 480 Mbps a costi paragonabili e vi era quindi il
problema di marketing di collocare comunque i prodotti a basse prestazioni.
Un parziale aiuto per evitare questa confusione
viene dallo speciale logo che il consorzio introdusse
per identificare i prodotti capaci di supportare effettivamente la modalità high speed.
Connessione fisica
Lo standard USB prevede diversi tipi di connettori fisici il cui impiego è raccomandato in specifiche
situazioni.
Tutti questi connettori hanno un basso numero di
contatti (quattro o cinque pin più la schermatura cavo, il cui contatto è assicurato dall’involucro metallico). I pin comprendono un contatto per la tensione
di alimentazione (+5V, corrente iniziale 100 mA, corrente massima dopo arbitraggio 500 mA; la potenza
massima che può essere fornita a un dispositivo USB
è quindi di 2.5W), una coppia di pin per la trasmissione dati con segnali differenziali (il funzionamento
è half duplex; i due pin sono usati insieme per compensare gli effetti di attenuazione e rumore specie
con cavi di elevata lunghezza), un contatto per la
massa segnali e, solo per i connettori “mini”, un quinto contatto (“ID”) che può essere o non collegato o
collegato a massa ed è usato per supportare il riconoscimento del funzionamento in modalità “host” (figura 12). Di conseguenza i cavi USB, con quattro soli
conduttori più schermatura, hanno sezione ridotta
e sono economici da fabbricare; la lunghezza massima prevista per un tratto di cavo dallo standard USB
è di 5 metri.
Tutti i connettori USB sono costruiti in modo ta-
Lezione 6
12
le che i 4/5+1 contatti si
stabiliscano non contemporaneamente, ma in una
sequenza ben precisa, che
appare subito evidente
esaminando con attenzione la lunghezza dei contatti nel connettore maschio.
Nella prima fase dell’inserimento il primo contatto
ad agire, seppure per un
breve istante, è l’involucro metallico di schermatura. I connettori femmina
normalmente collegano questo contatto al telaio metallico del dispositivo (per esempio il case del PC o
lo chassis della stampante); l’effetto che ne risulta è
che il collegamento del cavo assicura fin dall’inizio
di portare allo stesso livello di potenziale le masse di
riferimento delle due parti da connettere. Viene così scongiurato, o almeno molto ridotto, il rischio che
vi siano differenze di potenziale ancora da scaricare
quando, pochi istanti dopo, saranno i pin veri e propri a entrare in contatto: in caso contrario ciò interesserebbe direttamente l’elettronica di controllo della
porta USB, col rischio di danneggiarla.
Dopo che è entrata in contatto la massa di schermatura è la volta dei contatti +5V e massa segnali,
che entrano in contatto nella fase intermedia dell’inserimento del connettore. Solo nella terza e ultima
fase, un istante dopo questi due contatti, toccherà ai
due pin usati per il trasferimento segnali.
Questa successione assicura che, nel momento
in cui i pin dati entrano in contatto, i livelli elettrici
per alimentazione e massa si siano già stabilizzati e
l’elettronica di gestione sia già alimentata da un tempo sufficiente.
Il tutto fa sì che l’USB supporti strutturalmente il
funzionamento hot plug: le periferiche USB possono
essere collegate e scollegate anche a PC acceso senza danneggiarle elettronicamente né rischiare di generare falsi segnali nel transitorio di inserimento o
estrazione del connettore.
Solo nel caso delle periferiche USB con funzione
di memoria di massa (hard disk esterni, lettori/scrittori di schede, masterizzatori,..) esiste un’ulteriore
restrizione il cui rispetto non è possibile assicurare con soli ingegnosi accorgimenti meccanici come
quelli descritti: prima che la periferica venga scollegata è necessario che i dati ancora in attesa di essere
scritti arrivino fino a destinazione, altrimenti qualche
file potrebbe restare incompleto oppure la struttura
del file system potrebbe essere lasciata in uno stato
inconsistente.
Per questo è necessario informare il sistema operativo dell’intenzione di scollegare il connettore e attendere che l’operazione sia espressamente autorizzata. Nel caso di Windows questa operazione è indicata come “rimozione sicura dell’hardware”, “espelli”
o “rimuovi” a seconda dei contesti.
I connettori USB hanno anche altri vantaggi non
secondari. Innanzitutto sono robusti: a differenza di
un connettore seriale, parallelo o VGA, infatti, è molto difficile danneggiare o deformare i pin, visto che
risiedono su un supporto di plastica non sporgente e
ben protetto all’interno dell’involucro metallico. Sono
inoltre differenziati in base al ruolo delle periferiche
(host o client) così che risulti meccanicamente impossibile effettuare connessioni che risultino “logicamente” sbagliate. È inoltre impossibile collegarli sottosopra, grazie alla costruzione asimmetrica dell’involucro o alla posizione asimmetrica della struttura
in plastica contenuta al suo interno, e, cosa che cer-
PC Open 116 Luglio/Agosto 2007
Lezione 6
IT administrator - Hardware
13
14
15
to non guasta, risultano molto
economici
da fabbri16
care.
Un possibile problema riguarda la vicinanza delle porte USB, spesso
“impaccate” una sopra l’altra
soprattutto nel caso di quelle montate direttamente sulla
motherboard dei PC desktop. Questo può ostacolare
il collegamento di quelle periferiche, come chiavette flash, adattatori WiFi o Bluetooth, il cui spessore
è maggiore dell’interasse fra due porte adiacenti. In
questi casi tali periferiche sono generalmente fornite con un cavetto di prolunga che ne consente l’uso
anche in situazioni a spazio ristretto.
La differenza fra le diverse varianti dei connettori
USB sta soltanto nella forma e nelle dimensioni.
Il connettore di tipo A (foto 14) è quello presente
sui pannelli frontali e posteriori di PC e laptop. Ha
forma rettangolare, larga e sottile, e all’interno trova
posto, in posizione asimmetrica, un supporto in materiale plastico su cui sono piazzati i quattro pin (con
lunghezze differenziate, in modo tale da supportare
l’hot plug come sopra descritto). Il connettore femmina tipo A si trova su apparati host; quello maschio
su apparati client.
Il connettore di tipo B (foto 15) trova impiego lato
dispositivi client come scanner e stampanti, nonché
sugli hub USB, per quanto riguarda la connessione all’host o all’eventuale hub a monte. Il connettore femmina si trova sull’apparato client, mentre quello maschio è montato sul cavo proveniente dall’host.
I connettori di tipo mini, disponibili anch’essi nelle
varianti A e B di identico significato, hanno ingombri
ridotti e sono stati intro18
dotti nella revisione 2.0
e suoi supplementi, per
facilitare l’introduzione
della tecnologia USB anche su dispositivi mobili di piccole dimensioni,
come telefoni cellulari,
17
19
palmari, videocamere, fotocamere.
In particolare, il connettore femmina mini-B (foto 16) corrisponde esattamente dal punto di vista
logico al connettore femmina “B”, e trova posto sui
dispositivi client, mentre la più recente e rara presa
mini-A (foto 18) si usa su quei dispositivi mobili che
offrono una porta USB host miniaturizzata: per esempio è impiegata su alcuni player multimediali basati
su hard disk, dove consente ad esempio di collegare (con cavetto specifico) un lettore di schede o una
fotocamera per riversarne i contenuti sulla memoria
di massa, senza bisogno di interporre un PC portatile in quanto è il player stesso a comportarsi da host
(e il connettore mini-A corrisponde a questo ruolo
logico).
Questa insolita funzionalità host in dispositivi mobili è conosciuta come “USB in mobilità” (USB OnThe-Go, o OTG) (figura 19). Se il dispositivo può giocare sia il ruolo “host” sia il ruolo “client” e non vi è
spazio sufficiente per alloggiare sia una presa mini-B
sia una presa mini-A, è possibile utilizzare un particolare tipo di presa miniaturizzata bivalente denominata mini-AB, compatibile con spine di entrambi i tipi;
naturalmente in questo caso occorre stabilire subito
il ruolo della controparte e questo, come già accennato, è possibile grazie al pin ID appositamente previsto sui connettori di tipo mini.
Segnaliamo da ultimo che esiste anche un tipo ancora più miniaturizzato di connettore USB, il tipo micro (figura 17)
Dispositivi supportati e limitazioni
Una particolarità dello standard USB che lo differenzia dal FireWire sta nella modalità di controllo e di
dialogo delle periferiche che si attestano sul bus.
Nel caso USB, una periferica non può dialogare
direttamente con le altre periferiche, ma solo con
l’host. Inoltre può solo rispondere a richieste dell’host: non può contattarlo di sua iniziativa. In un bus
FireWire invece i client godono di una maggiore autonomia e possono aversi scenari nei quali una periferica trasferisce dati ad un’altra se e quando ne ha
bisogno, senza l’intervento dell’host.
Questa natura host-centrica dell’USB implica che
a parità di volume di dati trasferiti, il lavoro di controllo (ed eventuale ritrasmissione dati) a carico del
PC è maggiore rispetto a quanto avverrebbe con il
FireWire. In compenso l’implementazione dell’USB
risulta più semplice ed economica a livello hardware.
Sul FireWire invece gravano le royalties imposte dai
detentori di alcuni brevetti chiave di questa tecnologia: per ogni porta FireWire è dovuto il pagamento di
25 centesimi di dollaro.
Qualora il numero delle porte USB di cui è dotato il
PC non sia sufficiente a collegare tutte le periferiche
che servono, esistono due soluzioni:
• aggiungere un controller USB supplementare, su
scheda PCI (per desktop) o PCMCIA (per laptop),
con relativa dotazione di porte (di solito 2 o 4, a
cui se ne affianca spesso una interna nel caso delle schede PCI
per desktop) 20
(figura 20)
• utilizzare un
USB Hub (figura 21).
Un hub USB
assume un ruolo
concettualmente
analogo a quello
che in ambito
220V svolge una
PC Open 117 Luglio/Agosto 2007
13/14 - I connettori
USB maschio e femmina
di tipo A sono usati
per la connessione
lato host. Si noti che i
contatti hanno lunghezze
differenti, per fare in
modo che schermatura
e alimentazione entrino
in contatto prima dei pin
su cui transitano i dati.
Questo per supportare
la modalità hot plug,
che (almeno da un
punto di vista elettrico)
consente di collegare o
scollegare periferiche a
PC acceso senza danni
né alterazione dei dati in
transito
15 - Il connettore USB
tipo B è usato lato
periferica: per esempio,
nel collegamento fra PC
e stampante, è presente
sul pannello posteriore
della stampante
1.8.4.3 Sapere
quanti dispositivi
USB sono supportati
e le relative
limitazioni
16 - La differenza fra un
connettore standard e
uno in versione “mini”
consiste non soltanto
nelle dimensioni e nella
forma differente, ma
anche nella presenza di
un contatto aggiuntivo.
I connettori mini sono
normalmente impiegati,
per ragioni di spazio,
su dispositivi portatili
miniaturizzati come
smartphones, lettori MP3
e palmari
17 - L’ultimo arrivato
della famiglia di
connettori USB è il
cosiddetto connettore
micro USB (a destra
nella foto un micro-B
a confronto con le
dimensioni di un type A)
18 - Il connettore
mini-A è usato su
quei dispositivi mobili
miniaturizzati che devono
poter funzionare anche
da host
19 - La funzionalità
USB host, che permette
a dispositivi mobili di
comportarsi da host, è
indicata da un apposito
logo
20 - Per aggiungere
porte USB al PC, o per
dotarlo di porte USB 2.0,
la soluzione è aggiungere
un controller USB PCI,
che spesso monta 4
porte esterne + 1 interna
IT administrator - Hardware
21 - Un USB hub
permette di moltiplicare
il numero di porte USB
disponibili, alimentandole
con i 500 mA forniti
dalla presa host a cui
è collegato. Se però le
periferiche collegate
all’hub necessitano per
il proprio funzionamento
di una potenza elettrica
non trascurabile, meglio
optare per un modello
provvisto di alimentatore
dedicato
23 - Nel Pannello di
Controllo, la finestra
Proprietà relativa a
un hub USB riporta la
scheda Alimentazione,
in cui è possibile
esaminare il bilancio
dell’assorbimento di
corrente delle periferiche
connesse all’hub
22 - Il Pannello di
controllo permette di
esaminare numero e tipo
dei controller USB e delle
periferiche collegate
presa multipla: con- 21
sente di connettere
più client USB a una
stessa presa host. Vi
sono tuttavia delle
restrizioni. Innanzitutto il numero totale
di periferiche USB collegate, direttamente o tramite
uno o più hub, alle porte di uno stesso host controller, non può comunque superare 127, contando anche gli hub (questa restrizione dipende dal fatto che
le periferiche sono enumerate dal controller per mezzo di un identificatore a 7 bit).
Se si desidera collegare un maggior numero di dispositivi sarà necessario installare un secondo controller. Tuttavia è probabile che tale necessità sorgerà ben prima di arrivare a 127 client, poiché la banda complessiva viene comunque suddivisa fra tutte
le periferiche presenti, pertanto al crescere del loro
numero le prestazioni caleranno specialmente per i
dispositivi più esigenti in termini di velocità di trasferimento. In secondo luogo, l’albero costituito da hub
e periferiche non può superare profondità 5.
Sebbene questo valore possa sembrare alto e difficile da raggiungere in situazioni pratiche, si ricordi
che un primo hub è sempre incorporato sulla scheda madre, per pilotare le varie porte presenti; se un
secondo hub è collegato all’esterno, e a una porta di
questo hub è collegato un dispositivo “aggregato”
come un lettore di schede abbinato a un floppy oppure una webcam dotata di microfono digitale incorporato, in realtà abbiamo già raggiunto profondità 4.
Infatti questo tipo di periferiche, anche se a prima
vista può sembrare monolitico, è internamente costituito da un hub USB a cui sono collegate le periferiche elementari. Come si vede, anche in situazioni
relativamente normali ci si può avvicinare facilmente
al limite massimo.
È quindi preferibile evitare, se possibile, di costruire inutili cascate di hub USB, collegando gli hub USB
non a catena fra loro, ma direttamente alle porte dell’host. Inoltre, se le porte sono troppo poche per poter evitare di formare catene di hub e non è possibile
installare un controller supplementare per aggiungere qualche porta, è preferibile usare pochi hub a
molte porte piuttosto che una catena di hub a poche
porte, che porterebbe a un eccessivo aumento della
profondità dell’albero USB.
A questo riguardo vale la pena osservare che gli
hub USB in commercio solitamente hanno 4 oppure
7 porte. Questi ultimi possono essere realizzati come
una cascata di due hub a 4 porte in cui una delle por-
22
Lezione 6
23
te dell’hub primario è usata internamente per il collegamento al secondo hub (donde il “bizzarro” numero
di porte: 4+4-1=7). In questo caso non vi sarebbe vantaggio in termini di riduzione della profondità della
catena. Purtroppo per verificare se tale è la struttura
interna dello specifico prodotto scelto è necessario
collegarlo al PC ed esaminarlo con il Pannello di Controllo (figura 22) o altra utility di ispezione USB.
Un’importante questione da tener presente riguardo gli hub USB è quella relativa all’alimentazione. Come già accennato, ogni porta host USB può fornire al
massimo 500 mA di corrente alla periferica collegata
(il valore esatto che ogni singola periferica ha negoziato con il controller e ottenuto è verificabile usando il Pannello di Controllo – figura 23). Se l’hub USB
ha quattro porte dovrà teoricamente poter disporre
di 2000mA di corrente massima complessiva da erogare ai suoi client.
Se l’hub ricava la sua alimentazione dalla singola
porta host del PC a cui è collegato, però, esso ha a disposizione soltanto i 500 mA forniti da quella porta, a
cui va ovviamente sottratto il consumo elettrico della sua propria circuiteria interna. Rimangono quindi
disponibili circa 400 mA, ossia 100 mA per ogni porta dell’hub, un valore che potrebbe non consentire
un corretto funzionamento alle periferiche collegate.
Nel caso specifico di memorie di massa come chiavette flash oppure dischi esterni, si potrebbero addirittura perdere dati. In particolare, a causa del principio di funzionamento fisico su cui si basano i chip
flash, la fase di scrittura delle chiavette flash richiede un supplemento di corrente relativamente marcato. Un’alimentazione insufficiente durante questa
fase potrebbe portare a una subdola scrittura “labile” dei dati.
Per questa ragione molti hub USB vengono venduti provvisti di alimentatore dedicato, che fornisce
la corrente necessaria non tanto per il funzionamento dell’hub, ma delle periferiche non autoalimentate
che ad esso si collegheranno. Naturalmente questa
soluzione ha l’inconveniente di richiedere di avere a
disposizione una presa 220V.
Altri hub sono forniti con un cavetto che si può
collegare ad un’altra porta USB del PC e ha la sola
funzione di “rubare” altri 500mA per aumentare un
poco il budget elettrico a disposizione dell’hub, ma
si tratta di una soluzione non molto praticabile, anche perché, se si sta usando un hub, è proprio perché non c’erano più porte libere nel sistema, senza
contare che comunque anche con questo espediente
PC Open 118 Luglio/Agosto 2007
Lezione 6
IT administrator - Hardware
della “doppia attestazione” dell’hub si arriva solo a
1000 mA di corrente complessiva.
Oltre agli hub USB, la cui funzione primaria è quella di permettere di collegare un numero di periferiche
superiore al numero di porte disponibili, esistono anche dei prodotti più insoliti, detti USB extender, che
servono invece per raggiungere distanze superiori ai
5 metri massimi di lunghezza previsti dallo standard
per i cavi USB. In questo caso ci si serve di cavi di altro tipo, come i cavi di rete o addirittura la fibra ottica
per raggiungere distanze di scala quasi geografica.
Il modello di trasferimento dati su un bus USB si
basa sul concetto di canali logici denominati “pipe”
il cui funzionamento è unidirezionale. Per ogni controller USB vi sono fino a 16 canali entranti e altrettanti uscenti. I dati viaggiano sui canali organizzati
in pacchetti la cui dimensione è variabile per meglio
adattarla al tipo di traffico del canale e per non impegnare oltre il necessario il bus. I trasferimenti possono riguardare comandi impartiti dal controller alle
periferiche oppure un vero e proprio scambio dati fra
i due; lo scambio di dati, in particolare, può avvenire in modalità spot (trasferimento una tantum di una
grossa quantità di dati, con garanzia di non perdere
dati: bulk transfer), sincrona (velocità di trasferimento dati negoziata in anticipo, ma senza garanzia di affidabilità: isochronous transfer) o su interruzione, a
istanti non preannunciati (interrupt transfer).
I dispositivi USB, oltre a essere identificati da un
numero a 7 bit all’interno dell’“albero” di hub e periferiche gestiti da un controller, sono caratterizzati
da una classe di dispositivo (device class). Se rientrano in una delle classi standard, non richiedono
driver di alcun tipo per il proprio funzionamento; gli
esempi più noti sono le memorie di massa con connessione USB (chiavette e dischi esterni), le tastiere,
i mouse. Se invece necessitano di una gestione ad
hoc, per poter sfruttare tutte le particolarità della
periferica, allora il produttore dovrà fornire un driver; quanto al dispositivo, quando verrà connesso
alla porta USB esso dovrà presentarsi al controller
dichiarando di appartenere a una particolare classe
che istruisce il sistema operativo a richiedere l’installazione di un driver.
Le principali classi standard di dispositivi USB,
con relativi class ID, sono riportate in tabella 1.
Tabella 1 - Principali classi dispositivi USB
Class ID Denominazione classe
1
USB Audio device
USB Communication
2
device
USB Human Interface
3
device (HID)
7
USB Printer device
8
9
224
255
USB Mass Storage
Device (UMS)
USB Hub
USB Wireless
controller device
Custom device
Funzionalità
Periferica audio
Modem/fax,
schede di rete
Tastiere, mouse,..
Stampanti
“Chiavette” flash, hard
disk esterni, lettori di
schede
Hub
Adattatori di rete wireless
e bluetooth
Dispositivo non
standard che richiede
necessariamente un
driver specifico
Nel funzionamento di un insieme di dispositivi collegati via USB al PC un ruolo essenziale è svolto dall’USB host controller, ossia l’insieme di circuiti hardware che gestiscono il riconoscimento delle periferi-
che collegate e regolano il dialogo con esse.
Per quanto riguarda la versione 1.1 dello standard
USB erano state proposte due implementazioni alternative dell’host controller e della sua modalità
di gestione da parte del sistema operativo, note come UHCI (Universal Host Controller Interface) e OHCI
(Open Host Controller Interface): la prima proposta da
Intel, la seconda adottata dalla quasi totalità degli altri prodotti. Successivamente, la revisione 2.0 dello
standard propose un nuovo tipo di host controller,
noto come EHCI (Enhanced Host Controller Interface)
capace di supportare la modalità high speed e dotato
di 4 controller di prima generazione incorporati per
mantenere la possibilità di gestire periferiche USB 1.1
senza problemi di compatibilità.
Un’occhiata al Pannello di Controllo/Sistema/Gestione Periferiche/Visualizza periferiche per tipo (foto) rivela immediatamente questa struttura logica
e consente, cosa molto utile, di accorgersi immediatamente del livello di supporto USB presente nella
macchina: si può concludere che è presente supporto per USB 2.0 solamente se nel sottoalbero relativo
alle periferiche USB installate figura almeno una voce EHCI o la parola Enhanced, altrimenti il supporto
è USB 1.1.
1.8.5 Interfaccia
FireWire
Interfaccia FireWire
L’interfaccia FireWire, nota anche come IEEE1394
e ribattezzata i.Link da Sony, è un bus seriale ad alte
prestazioni introdotto soprattutto con l’obiettivo primario di facilitare la comunicazione audio-video fra
un personal computer e periferiche multimediali.
Il maggior impulso ai lavori per la definizione e
standardizzazione del FireWire fu dato da Apple che
vedeva nella nuova interfaccia il successore delle
connessioni SCSI. La prima versione dello standard,
a cui si lavorò nel working group 1394 dell’IEEE (donde il nome), uscì nel 1995 e fu ovviamente adottata
in nuovi modelli Mac, consentendo un efficace e facile utilizzo di dispositivi dalla forte “fame” di banda
come memorie di massa veloci esterne o videocamere. Si trattava di una innovazione molto significativa:
all’epoca l’USB non esisteva ancora e quando, poco
dopo, uscì la versione 1.1, le sue prestazioni erano assolutamente inferiori a quelle del FireWire. Solo l’USB
2.0, uscito nel 2000, era comparabile con il FireWire.
Una particolarità che ha probabilmente penalizzato agli inizi il FireWire, pur tecnicamente molto valido e avanzato, in termini di diffusione, consiste nel
fatto che la tecnologia faceva uso di diversi brevetti
i cui detentori, fra cui Apple, richiesero il pagamento di una piccola somma complessiva per ogni porta FireWire installata (inizialmente 1 $ per porta, poi
ridotto a 0.25 $ per porta dopo un compromesso incrociato fra i proprietari dei brevetti). Per piccola che
possa sembrare, questa somma agì su alcuni come
dissuasore e su altri (Intel) addirittura come incentivo a sviluppare al massimo la tecnologia concorrente USB 2.0.
Il risultato è che il FireWire oggi non è diffuso come
avrebbe probabilmente potuto essere e vi sono due
interfacce seriali a larga banda (USB 2.0 e FireWire)
anziché una, con campi d’impiego vagamente complementari. Il tutto “obbliga”, per poter avere accesso a tutte le possibili applicazioni, a equipaggiare i PC
con più hardware, più porte e più driver, e a dotarsi
di più cavi diversi.
Funzionamento, prestazioni e limitazioni
Il FireWire originale, standardizzato nel 1995 come
IEEE1394, è oggi più propriamente noto come FireWire
400, per la sua capacità di supportare un bit rate mas-
PC Open 119 Luglio/Agosto 2007
Il logo FireWire
identifica i prodotti
dotati di questo tipo di
interfaccia, nota anche
come IEEE1394, iLink
o DV
24
1.8.5.1 Conoscere le
differenti interfacce
FireWire, i principi di
funzionamento, le
relative prestazioni e
limitazioni
IT administrator - Hardware
24 - Un connettore
FireWire a 4 pin. Questo
tipo di connettore è
adatto per l’uso in
dispositivi miniaturizzati
e con periferiche che non
richiedono alimentazione
25 - Il connettore
FireWire a 6 pin ha
sagoma diversa e
dimensioni maggiori
rispetto a quello a 4
pin. A livello funzionale
la differenza consiste
nel fatto che i due
contatti supplementari
sono in grado di fornire
alimentazione al
dispositivo collegato
1.8.5.2 Interfaccia
FireWire:
connessione fisica.
1.8.5.3 Sapere
quanti dispositivi
FireWire sono
supportati e le
relative limitazioni.
1.8.6 Interfaccia ad
Infrarossi
1.8.6.1 Conoscere
le differenti
interfacce ad
Infrarossi, i principi
di funzionamento, le
relative prestazioni e
limitazioni
24
25
Lezione 6
comunque effetti catastrofici; tipici esempi sono gli
streaming audio e video, mentre è chiaro che una
“occasionale” perdita di dati non sarebbe assolutamente accettabile in un flusso di dati usato per replicare un database su un altro server o effettuare
un backup.
Connessione fisica
simo di 400 Mbps. Le velocità supportate sono in realtà tre: 100, 200 e 400 Mbps. La lunghezza massima del
cavo per una singola tratta è di 4 metri circa, ma grazie alla già citata peculiarità del FireWire (implementata in molte periferiche) di supportare uno schema di
connessione a catena (“daisy chain”) è possibile raggiungere distanze maggiori semplicemente costruendo una catena di dispositivi oppure interponendo dei
ripetitori di segnale.
Lo standard prevede due tipi di connettore: a 4 pin
(figura 24) e a 6 pin, con il secondo in grado di fornire
anche una robusta alimentazione al dispositivo collegato (figura 25).
Proprio come è accaduto nel caso dell’USB, anche
del FireWire, dopo alcuni anni dall’introduzione della
prima versione, è uscita una revisione pensata per migliorare ulteriormente le prestazioni.
Si tratta del FireWire 800, una evoluzione dello standard originale introdotta da Apple a partire dal 2003.
La novità di rilievo consiste in un raddoppio delle prestazioni, con una banda che può raggiungere ben 800
Mbps. Lo standard FireWire 800 è di fatto una applicazione della raccomandazione IEEE1394b, la quale prevederebbe anche la possibilità di impiegare cablaggi
alternativi e di raggiungere bit rate ancora superiori.
È inoltre attualmente al lavoro il working group
1394c per definire una modalità operativa che consenta di usare FireWire su normali cavi categoria 5
(gli stessi usati nelle reti Ethernet) raggiungendo le
stesse velocità del FireWire 800 (banda “lorda” di 1
Gbps, banda utilizzabile 800 Mbps) su distanze di ben
100 metri per tratta. Negli uffici questo permetterebbe
di collegare dischi o periferiche FireWire remoti (per
esempio centralizzati in un locale server) come se fossero locali al PC, usando lo stesso cablaggio strutturato categoria 5 già installato: sicuramente una importante semplificazione e un grosso vantaggio anche economico. La possibilità di usare cavi Cat.5 era
già prevista da FireWire 800, ma per velocità solo fino
a 100 Mbps. Con il 1394c questo valore dovrebbe essere decuplicato.
Il trasferimento dati su un bus FireWire può avvenire in modo isocrono oppure asincrono. Il modo asincrono è il più semplice: i dati vengono spediti quando ve ne è la necessità, senza uno schema
preordinato né garanzia che il bus sia libero per il
tempo sufficiente a completare la spedizione immediatamente (potrebbe essere necessario che la periferica attenda, trattenendo in un buffer i dati inevasi,
e ritenti più tardi). Nel modo isocrono vi è la garanzia che a intervalli regolari ci sia una “finestra” temporale in cui il dispositivo ha la garanzia di poter trasmettere dati.
Tuttavia se, per qualsiasi motivo, il pacchetto inviato non viene ricevuto o elaborato correttamente
dal destinatario, esso non viene automaticamente
ritrasmesso. Questa modalità è utile per inviare flussi di segnali in tempo reale nei quali l’eventuale occasionale perdita di qualche pacchetto non avrebbe
Come già accennato, il FireWire 400 prevede l’uso
di due possibili tipi di connettore: a 4 pin senza alimentazione della periferica e a 6 pin, con alimentazione. Riguardo a quest’ultimo caso, la tensione di
alimentazione non è standardizzata e ogni produttore può quindi definirla secondo le proprie necessità
tecniche; con cavi standard è comunque possibile
raggiungere correnti di 1000 mA o poco più mentre
la tensione può raggiungere i 25-30V; è quindi teoricamente possibile fornire fino a 30-40W di potenza a
una periferica direttamente via cavo FireWire, senza
cioè che questa debba essere accompagnata da un
proprio alimentatore nelle vicinanze: questa possibilità può semplificare notevolmente l’installazione
remota di periferiche (si pensi, per esempio, a una
webcam da esterni).
La versione a 4 pin non porta alimentazione ed è
adottata anche da Sony nella sua implementazione
dello standard, ribattezzata i.Link.
Fino a 63 dispositivi
Su un singolo bus FireWire sono supportati fino a
63 dispositivi; il loro collegamento deve avere una
topologia lineare oppure ad albero (eventualmente
in presenza di hub), ma non ciclica. Tipico di molte
periferiche FireWire è di avere due connettori, il che
consente di costruire vere e proprie catene di periferiche. Uno e un solo dispositivo partecipante alla
catena ricopre il ruolo di “root node” e gli viene assegnato un identificatore particolare. Un altro identificatore specifico viene impiegato per indicare che
un pacchetto o messaggio deve essere inviato a tutti
i dispositivi collegati (broadcast).
Una peculiarità che distingue il FireWire dall’USB,
a cui abbiamo già accennato, sta nel fatto che due
periferiche possono comunicare fra loro direttamente, anche senza il coinvolgimento o l’orchestrazione
della CPU e del sistema operativo. Così, una webcam
FireWire potrebbe mandare i dati direttamente a un disco fisso FireWire, oppure uno scanner potrebbe mandare direttamente a una stampante le immagini acquisite. Inoltre le periferiche dispongono di accesso diretto alla memoria (DMA) che consente loro di scrivere
dati direttamente in un’area designata dell’host.
Queste caratteristiche significano che il PC o Mac
subisce un carico di lavoro trascurabile o nullo durante il funzionamento del bus, a differenza di quanto
avviene con l’USB.
Collegamenti a Infrarossi
Un tipo di interfaccia wireless che in passato, per
parecchi anni, ha costituito l’unica modalità praticabile per collegare fra loro due dispositivi PC/PDA senza usare cavi o docking station, è l’interfaccia a raggi
infrarossi. Questa tecnologia, così largamente diffusa nell’elettronica di consumo per la fabbricazione di
telecomandi, in ambito informatico è stata standardizzata da un’istituzione ad hoc denominata Infrared
Data Association (IrDA); le interfacce wireless realizzate in conformità con i dettami di quest’associazione vanno anch’esse comunemente sotto lo stesso
nome (figura 26).
Una restrizione importante della comunicazione
IrDA sta nel fatto che la comunicazione bidireziona-
PC Open 120 Luglio/Agosto 2007
Lezione 6
IT administrator - Hardware
Tabella 2 - Tipi di interfacce a infrarossi
Identificazione Nome
SIR
MIR
FIR
CIR
Velocità supportate
9.600, 19200, 38400,
57600,115200 bps
Campo d’impiego e particolarità
Sostituto wireless di una porta seriale
Serial InfraRed
RS-232-C con le stesse velocità tipiche
Evoluzione di SIR con supporto per velocità
Medium InfraRed
576Kbps, 1152 Kbps
maggiori
Comunicazione ottica wireless ad alta velocità
Fast InfraRed
4 Mbps
su breve distanza; obbligo di retrocompatibilità
con SIR
Variabili ma molto basse (poche Non standardizzato da IrDA.
Consumer InfraRed
centinaia di bit al secondo)
Telecomandi
le è possibile solo alternando i ruoli di trasmittente
e ricevente (half duplex), in quanto chi trasmette non
è in grado di ricevere durante l’emissione della propria luce infrarossa.
Perché la comunicazione abbia successo, risultando stabile e con una velocità prossima ai massimi
teorici, è necessario che i due dispositivi siano accoppiati in modo il più possibile preciso, ossia accuratamente allineati e a una distanza né eccessiva (il
segnale arriverebbe attenuato) né troppo ridotta (il
ricevitore sarebbe “accecato” dalla troppa luce infrarossa). Una volta prese tutte le misure necessarie per
assicurare una buona comunicazione, le prestazioni
massime raggiungibili dipendono dal tipo di interfaccia IrDA montata sui due dispositivi. Esistono infatti
diverse versioni dello standard, mirate essenzialmente a impieghi differenti (vedi tabella 2).
Come avviene il collegamento
Le interfacce IrDA realizzano un collegamento ottico basato sull’impiego di luce infrarossa, invisibile
quindi per l’occhio umano, che viene emessa in un fascio le cui ampiezza (non troppo ristretta) e intensità
(né troppo alta né troppo bassa) sono regolate dallo
standard. Le lunghezze d’onda centrali delle bande
di luce infrarossa usate sono normalmente quelle di
870, 930 e 950 nanometri.
La distanza nominale alla quale due normali interfacce IrDA dovrebbero poter comunicare regolarmente è di circa un metro, anche se distanze inferiori sono accettabili per comunicazioni in cui una delle
due controparti adotti una variante a basso consumo
dell’interfaccia.
Per quanto riguarda i modelli logici di comunicazione previsti dallo standard IrDA, abbiamo innanzitutto una modalità in cui viene di fatto emulata una
porta seriale: questo profilo d’uso è denominato IrCOMM. Esistono però anche altri profili meno usati, fra cui IrOBEX (Infrared Object Exchange) e IrLAN
(per implementare una piccola LAN basandosi su
delle connessioni a infrarossi anziché usando cavo
Ethernet o schede WiFi).
Una restrizione concernente l’uso di IrDA sta nel
fatto che una porta a infrarossi non può essere contemporaneamente impegnata in più comunicazioni
con periferiche diverse. Se questo fosse necessario,
bisognerebbe installare porte supplementari. Questo
non è un grosso problema per le porte IrDA basate
su USB, mentre per quelle gestite come porte seriali
esistono limitazioni al numero massimo installabile,
per mancanza di IRQ e indirizzi I/O.
che i dispositivi siano l’uno in vista dell’altro, senza ostacoli che interferiscano
con i raggi infrarossi, né altre fonti intense di raggi
infrarossi dello stesso spettro. La velocità di trasferimento dati teoricamente potrebbe raggiungere anche 4 Mbps in condizioni ottimali se entrambi i dispositivi supportassero FIR, ma è molto più probabile il
caso in cui almeno uno dei due non lo supporta; in
questo caso si riesce tutt’al più ad arrivare alla massima velocità SIR (115 Kbps). Anche l’allineamento
geometrico fra le periferiche è importante e, oltretutto, la distanza alla quale si può comunicare rimane comunque piuttosto ridotta.
Al contrario, si può comunicare senza particolari difficoltà con un dispositivo Bluetooth anche se si
trova chiuso nella ventiquattr’ore o se è nel raggio
di una decina di metri. La banda effettivamente raggiungibile arriva a valori prossimi ai massimi teorici
e la connessione, una volta effettuata, assicura una
buona stabilità, almeno fintanto che ci si mantiene
entro il raggio prescritto e in assenza di interferenze
radio, ovviamente.
Il vero tallone d’Achille del Bluetooth è la relativa complessità con cui questo tipo di tecnologia va
configurata e gestita, a causa del modello logico più
complesso di quello IrDA e delle (comprensibili e doverose) necessità di security.
Infatti, poiché il Bluetooth è un’interfaccia radio
senza antenna direttiva, esso è intrinsecamente omnidirezionale e nel suo raggio d’azione possono cadere anche, inopportunamente, l’appartamento dei
vicini, l’ufficio del piano di sotto, perfino dispositivi
Bluetooth in tasca alle persone nei paraggi. Tutte situazioni che non potevano praticamente mai presentarsi con IrDA.
È quindi necessario stabilire con chiarezza quale
sia l’ambito d’impiego e chi siano le controparti: una
necessità inesistente con IrDA, in cui basta avvicinare (e orientare correttamente) le periferiche perché
si “sentano” e inizino a “parlarsi”. Con Bluetooth le
periferiche devono essere trovate e identificate per
nome; deve essere stabilita una relazione di “fiducia” (accoppiamento, o pairing) fra PC e periferiche,
eventualmente protetta da password e crittografia;
deve poi essere esplorato l’insieme dei servizi offerti
dalle periferiche raggiunte e vanno infine create connessioni, o “scorciatoie”, verso i servizi che interessa utilizzare.
Come funziona
Bluetooth
L’interfaccia a infrarossi, piuttosto lenta e scomoda da usare e a volte caratterizzata da un funzionamento incerto, è da tempo entrata in fase declinante, sostituita dalla tecnologia Bluetooth che si basa su comunicazione radio. Una porta IrDA richiede
Di Bluetooth esistono tre classi di potenza radio
che corrispondono ovviamente a tre raggi di copertura (vedi tabella 3). Ovviamente per poter sfruttare
pienamente il raggio di copertura è necessario che
tutti i dispositivi coinvolti appartengano alla stessa
classe. In una comunicazione fra due dispositivi A e B
PC Open 121 Luglio/Agosto 2007
1.8.6.2 Interfaccia
ad Infrarossi:
connessione fisica
1.8.6.3 Sapere
quanti dispositivi
ad Infrarossi sono
supportati e le
relative limitazioni.
1.8.7 Bluetooth
1.8.7.1 Conoscere
le modalità di
funzionamento
dell’interfaccia
Bluetooth.
IT administrator - Hardware
è del tutto inutile, poniamo, che B sia un dispositivo
con copertura 100 metri se A ha una copertura di soli
10 metri: A potrebbe captare il segnale di B, ma non
potrebbe mai “farsi sentire” da B, e poiché questo è
occasionalmente necessario anche in una comunicazione unidirezionale da B ad A, di fatto la comunicazione non funzionerebbe in nessun caso. Naturalmente A e B potranno regolarmente comunicare se
posti a una distanza che rientri nel range gestito dal
dispositivo a copertura più ristretta. In altre parole
le classi di potenza sono “compatibili verso il basso”,
a patto però di sottoutilizzarle per adeguarle alla copertura supportata dal dispositivo più “debole”.
Tabella 3 - Classi di potenza Bluetooth
Classe
I
II
III
Raggio di copertura
approssimativo
100 metri
10 metri
1 metro
Massima
potenza radio
100 mW
2.5 mW
1 mW
Quanto alla velocità di trasferimento dati, anche
Bluetooth ha conosciuto un’evoluzione per aumentare le prestazioni (oltre ad altri piccoli miglioramenti).
In particolare, le versioni 1.x dello standard (la 1.2 è
la più diffusa e stabile) raggiungono una banda massima di 721 Kbps, mentre la più recente 2.0, introdotta nel 2004, pur restando retrocompatibile con dispositivi 1.1, può raggiungere una banda tripla, pari
a circa 2.1 Mbps.
Un dispositivo Bluetooth può comunicare direttamente con un numero di controparti attive non superiore a 7 (possono però essere identificate, e tenute
Lezione 6
in standby, fino a 255 altre periferiche). Il gruppo di
7+1 dispositivi attivi forma una minuscola rete denominata piconet in base alla terminologia Bluetooth;
la piconet contiene un solo dispositivo master. Per
motivi legati alla tecnologia radio usata, la comunicazione non può avvenire contemporaneamente fra
il master e più controparti, ma con uno schema a (rapida) rotazione si crea l’illusione che ciò sia possibile, proprio come avviene nei sistemi operativi multitasking in cui apparentemente la CPU sta eseguendo
più programmi nello stesso tempo, mentre in realtà
sta eseguendoli “a turno”.
Come già accennato, il modello di comunicazione Bluetooth è più “ricco” e sofisticato, ma anche
più difficile da comprendere appieno, di quello IrDA.
Configurare per la prima volta una connessione Bluetooth non è certamente facile come collegare un cavo
o accostare due dispositivi IrDA, ma il software di gestione normalmente permette di creare delle vie rapide per attivare connessioni definite in precedenza;
certe applicazioni, come il software di navigazione
satellitare, si spingono addirittura fino ad attivare automaticamente il collegamento verso il GPS esterno
quando vengono lanciate, evitando così di richiedere
qualsiasi operazione manuale; si può quindi dire che,
in definitiva, a regime il Bluetooth riesce a risultare
comunque piuttosto semplice da usare.
Lo standard definisce oltre 20 “profili”, intesi come
descrizioni di finalità d’utilizzo e annessa modalità di
comunicazione e controllo. Fra i più noti, Hands-Free
Profile, usato per gli auricolari Bluetooth; Object Push Profile, usato per scambiare contatti fra telefonini;
Serial Port Profile, un rimpiazzo wireless di una porta
seriale (un po’ l’equivalente Bluetooth dell’IrCOMM
Tabella 3 - Principali profili Bluetooth
Identificatore Denominazione
profilo
estesa
Advanced Audio
A2DP
Distribution Profile
BIP
BPP
DUN
FTP
HCRP
HFP
HID
HSP
OPP
PAN
SPP
Finalità
Dispositivi tipici
Gestione di flussi audio
Cuffie e auricolari Bluetooth
streaming
Trasferimento di immagini e Fotocamere, cornici fotografiche digitali,
Basic Imaging Profile
loro manipolazione di base
videoproiettori
Invio di file a periferiche di
Basic Printing Profile
Stampanti portatili, fotocamere, cellulari
stampa
Dial-Up Networking
Accesso alla rete mediante
Dongle Bluetooth per PC; telefoni cellulari
Profile
dial-up verso un ISP
File Transfer Profile Trasferimento generico di files PC, palmari, cellulari
Equivalente wireless di un
Hard copy Cable
cavo di collegamento con la Stampanti portatili, dongle Bluetooth per PC
Replacement Profile
stampante.
Cellulari; Portable Navigation Devices (PND) per
Collegamento wireless
auto; dispositivi viva voce Bluetooth. Spesso
Hands-Free Profile
automatico a sistema viva
integrato nell’elettronica di bordo di diverse auto
voce
recenti.
Collegamento con periferiche
Human Interface
di input con scarso
Mouse e tastiere wireless
Device profile
fabbisogno di banda
Collegamento con auricolari
Bluetooth monofonici; funzioni
Auricolari Bluetooth; cellulari; dispositivi viva voce
Headset Profile
elementari di controllo delle
chiamate telefoniche
Scambio (deciso dal mittente)
di piccole quantità di
informazioni come contatti, Cellulari, palmari, dongle Bluetooth per PC
Object Push profile
files, messaggi fra dispositivi
Bluetooth
Personal Area
Creazione di una LAN wireless Dongle Bluetooth per PC; access point wireless di
Network profile
basata su Bluetooth
rete in tecnologia Bluetooth
Sensori GPS Bluetooth; telefoni; dongle Bluetooth
Equivalente wireless di un
Serial Port Profile
cavo seriale
per PC; palmari e smartphones
PC Open 122 Luglio/Agosto 2007
Lezione 6
di uno stack IrDA) usato, ad esempio, per collegarsi
a un sensore GPS esterno.
La tabella riporta un elenco maggiormente completo di profili Bluetooth.
Applicazioni tipiche
(PDA, telefonia mobile, stampanti ecc.)
Questa abbondanza di profili applicativi corrisponde all’effettiva abbondanza di opportunità d’impiego
di una tecnologia pratica e versatile come il Bluetooth, che risolve senza bisogno di cavi e adattatori
il problema dell’interconnessione a corto raggio di
periferiche a banda medio-bassa. Il campo d’impiego
è quindi particolarmente ampio e comprende praticamente di tutto:
• sistemi informatici come telefoni cellulari, PDA,
smartphone, PC e sensori GPS;
• periferiche di input come mouse, tastiere e joypad
senza fili (oppure telecomandi che usano Bluetooth
al posto della classica tecnologia a infrarossi);
• prodotti di rete come access points basati su Bluetooth anziché su WiFi come tecnologia wireless;
• per quanto riguarda il mondo dell’audio, auricolari,
cuffie e sistemi audio wireless;
• in campo automotive, sistemi viva voce e navigatori satellitari;
• in ambito imaging, stampanti wireless che ricevono le foto o i documenti da stampare via Bluetooth
e perfino cornici fotografiche digitali LCD in grado
di ricevere via Bluetooth (magari da un telefonino
nei paraggi…) le foto da visualizzare.
Memory Card
In virtù dell’incessante aumento della capacità in
rapporto al costo, e del costo che si mantiene abbordabile anche in senso assoluto, la tecnologia Flash
Memory è senza dubbio destinata a diventare una
seria alternativa allo storage convenzionale basato
su dischi magnetici. I vantaggi principali sono l’insensibilità agli urti e l’assoluta silenziosità grazie alla
mancanza di parti in movimento, il basso consumo
elettrico, l’ottimo tempo d’accesso medio, la miniaturizzazione, la modestissima produzione di calore in
esercizio. Anche la durata del prodotto, che agli albori era piuttosto limitata tanto da rendere impossibile
l’impiego in applicazioni embedded con I/O intensivo
per periodi di anni, è rapidamente migliorata e sono
oggi supportati milioni di cicli di scrittura, rimuovendo quasi del tutto quello che altrimenti sarebbe un
importante tallone d’Achille. L’unico problema rimasto è il costo per gigabyte (attualmente alcuni euro
per gigabyte), che non riesce ancora a essere competitivo con quello dei dischi fissi di taglio medio-alto (20-30 centesimi per gigabyte), anche se, come già
accennato, il gap si sta riducendo continuamente. Già
oggi, nella fascia “bassa” (fino a 4 GB) soprattutto per
applicazioni embedded o per dispositivi mobili, la
tecnologia hard disk è perdente ed è stata “ricacciata” nella fascia delle alte capacità (decine o centinaia
di GB) su cui le flash memory non possono ancora
competere concretamente a causa del prezzo esorbitante. Sono già comparsi sul mercato, comunque,
i primi SSD Solid State Disk, basati su flash memory,
con capacità di 64 GB: il costo è ancora alto ma il
trend è chiaro: gli hard disk tradizionali avranno senso solo su capacità sempre più elevate. Per capacità
piccole, la flash memory può riuscire a competere
anche sul costo assoluto, anche perché un hard disk,
per piccola che sia la sua capacità, deve comunque
IT administrator - Hardware
comprendere l’elettronica di controllo, un motore di
rotazione e un attuatore per le testine di lettura/scrittura, oltre alle testine stesse e l’involucro: il suo costo quindi non potrà mai scendere al di sotto di una
certa soglia, sotto la quale invece esistono già diversi prodotti in tecnologia flash memory di rispettabile
capacità e ne esisteranno sempre di più.
Memorie a stato solido
Considerato ciò, non stupisce notare che i PC di
recente concezione sono spesso dotati di lettori di
schede incorporati. Nei sistemi laptop, per ragioni di
spazio, normalmente sono supportati solo alcuni dei
formati miniaturizzati più diffusi, mentre sui PC desktop il lettore di schede supporta di solito tutti i formati conosciuti e occupa lo stesso spazio di un floppy drive (che, anzi, generalmente rimpiazza).
Per i PC più datati, oppure per aggiungere a un portatile il supporto per un formato di flash card non direttamente utilizzabile sugli slot di lettura integrati, si
può invece aggiungere un lettore di flash card esterno, con interfaccia USB. È quasi comico, leggendo la
descrizione di questi prodotti, constatare che il numero di formati supportati supera ormai 20 o qualche volta 30.
D’altra parte questa è oggettivamente la situazione
che si è venuta a creare con la proliferazione di formati di flash card. In qualche caso un nuovo formato
viene ideato, introdotto sul mercato e subito adottato da qualche dispositivo per oggettive ragioni di
necessità tecnica: ad esempio, le Compact Flash, a
dispetto del nome che era appropriato solo qualche
anno fa, risultano ormai troppo grandi per essere
usate su palmari e telefoni cellulari di media miniaturizzazione e sono state rimpiazzate dal più compatto formato SD.
Naturalmente il problema si è ripresentato sui modelli più lillipuziani oggi sul mercato, dove perfino la
SD sarebbe troppo grande e sono stati quindi introdotti i formati miniSD e microSD, dalle dimensioni
veramente minime.
Altre volte, però, nuovi formati con dimensioni e
prestazioni sostanzialmente analoghi ad altri formati,
già esistenti, che sarebbero perfettamente idonei allo scopo, vengono introdotti sul mercato da consorzi
di cui a volte fanno parte i produttori di fotocamere
o cellulari con il chiaro scopo di legare il cliente del
dispositivo alla “propria” linea di schede flash e ai
“propri” formati proprietari, che naturalmente, avendo un mercato più ristretto e meno concorrenziale
di quello dei formati più diffusi, tendono ad avere un
prezzo di vendita più alto.
La tabella 4 tenta di proporre un elenco non esaustivo dei principali formati di memorie flash con le
relative caratteristiche.
26
Unità di lettura e
scrittura delle schede
di memoria
Dal punto di vista
del sistema operativo,
27
28
PC Open 123 Luglio/Agosto 2007
1.8.7.2 Applicazioni
tipiche (PDA,
telefonia mobile,
stampanti ecc.).
1.8.8.1 Conoscere le
differenti tipologie di
schede di memoria
a stato solido
(memory card),
quali: CompactFlash,
Secure Digital,
Memory Stick,
Transflash, ecc.
1.8.8 Memory Card
26 - Il formato Compact
Flash è stato il primo
a imporsi nel campo
delle memorie flash
su scheda. Oggi per
le sue dimensioni sta
progressivamente
cadendo in disuso
27 - Le schede Secure
Digital e relative varianti
(miniSD e microSD)
costituiscono la famiglia
oggi più diffusa
28 - Sony adotta nei suoi
prodotti una famiglia di
formati di sua ideazione:
Memory Stick
IT administrator - Hardware
Lezione 6
Tabella 4 - Tipi di Memory Card
Denominazione
Abbreviazione
Anno di
introduzione
Compact Flash
CF
1994
Secure Digital
SD
1999
SDHC
2006
Micro Secure
Digital;
“TransFlash”
MicroSD
2005
Mini Secure Digital
MiniSD
2003
MultiMedia Card
MMC
1997
Reduced Size
Multimedia Card
RS-MMC
2003
Secure Digital High
Capacity
Reduced Size Dual
Voltage Multimedia RS-DV-MMC
Card
Memory Stick
1.8.8.2 Conoscere
le unità di lettura/
scrittura schede di
memoria.
MS
1998
Memory Stick Duo
MS Duo
2002
Memory Stick Pro
MS Pro
2003
Memory Stick
Duo Pro
MS Duo Pro
Memory Stick
Micro
MS Micro
2006
SmartMedia
SM
1995
xD Card
xD
2002
Impieghi prevalenti
Tagli esistenti
sul mercato
Note
Interfaccia analoga a PCMCIAATA. Può essere vista come
disco IDE semplicemente
Massima varietà
Fotocamere
(anche da 16 GB con un adattatore passivo.
Formato attualmente in lento
e oltre)
declino per le eccessive
dimensioni.
Comprende circuiteria
Fotocamere;
crittografica per la protezione
videocamere con
del copyright. Compatibilità
Fino a 2 GB
funzione di cattura foto;
con MMC, se lo slot ha
palmari; riproduttori
spessore adeguato
audio/video portatili
Utilizza un modello di
indirizzamento della memoria
esteso rispetto a quello delle
Come SD
Oltre 2 GB
normali schede SD, per poter
supportare tagli superiori ai
2 GB
Compatibile con slot SD
Cellulari e
Tagli
mediante adattatore di
smartphones
medio-piccoli
formato non elettronico
Compatibile con slot SD
Cellulari e
Tagli
mediante adattatore di
smartphones
medio-piccoli
formato non elettronico
Compatibilità meccanica,
Tendenza
elettronica e logica con i
Come SD
al declino
lettori SD
Compatibile con slot
MMC mediante adattatore
Come MMC
di formato puramente
meccanico
Accetta alimentazione
a bassa tensione per
Cellulari e
Tagli
aumentare l’autonomia in
smartphones
medio-piccoli
caso di impiego in dispositivi
mobili a batteria
Principalmente prodotti
Tagli piccoli
Sony e Sony-Ericsson
Principalmente prodotti
Formato più piccolo rispetto
Ampia
Sony e Sony-Ericsson
alla normale Memory Stick
Prestazioni e capacità
Principalmente prodotti
Ampia
maggiori rispetto alle normali
Sony e Sony-Ericsson
Memory Stick
Principalmente prodotti
Combina i miglioramenti delle
Ampia
Sony e Sony-Ericsson
famiglie Pro e Duo
Ulteriore forte riduzione delle
Principalmente prodotti
Tagli medi
dimensioni esterne rispetto
Sony e Sony-Ericsson
alla linea Duo
Soprattutto fotocamere
Formato obsoleto ormai
Fuji e Olympus
Da 2 MB a 128 MB
caduto in disuso
commercializzate fino
al 2001 circa
Prodotti Olympus e Fuji Da 16 MB a 2 GB
non fa differenza che i lettori/scrittori di schede siano interni o esterni, se l’interfaccia attraverso cui sono gestiti è USB. Esistono lettori di schede interni per
sistemi desktop che presentano un pannello frontale
con un insieme di slot di tutte le forme e dimensioni
(figura 30); ogni slot può accogliere un certo numero
di formati geometricamente compatibili, chiaramente indicati sul frontale, e gestisce poi le eventuali differenze logiche o elettroniche fra i formati.
Spesso il lettore integra un hub USB che gli permette di offrire anche una o più porte USB sul frontale (non si tratta di una replica della porta USB a cui si
attesta internamente il lettore, ma di una nuova porta
USB client dell’hub integrato nel lettore stesso). Molti
lettori “universali” si basano su 4 slot per le principali
“famiglie”: CF, SD, MS e xD. I formati “mini” e “micro”
di solito non sono leggibili direttamente (del resto,
piccoli come sono, sarebbe scomodo perfino afferrarli per inserirli o rimuoverli dallo slot), ma è necessario usare l’apposito adattatore meccanico che
li “promuove” a SD o a MMC full size, che è possibile
inserire nello slot del lettore. I lettori di schede esterni si dividono in due categorie principali: ne esistono
multiformato e monoformato.
PC Open 124 Luglio/Agosto 2007
Lezione 6
29
I primi si presentano come dei piccoli box con un
pannello connessioni su cui sono presenti gli slot per
i vari formati (come sui modelli interni, ma con ingombri minori); sul retro può essere presente il cavo
USB prigioniero oppure il connettore tipo B o mini-B
per collegarsi al PC con un cavo.
La seconda categoria principale di lettori di schede è quella dei lettori monoformato, confezionati come “chiavette” USB che a seconda dei casi possono
avere uno slot esterno oppure una sede interna in
cui deve essere alloggiata la scheda flash. Lettori di
questo secondo tipo sono meno versatili dei modelli
multiformato, ma permettono di riciclare come “chiavetta USB” una vecchia flash card con capacità o prestazioni insufficienti.
Tutti i lettori di schede USB richiedono di essere rimossi con qualche accortezza, come si fa per i dischi
fissi esterni: prima di scollegarli occorre usare (sotto
Windows) la procedura “rimozione sicura dell’hardware” e attendere il consenso.
Da notare che con un lettore multiformato il collegamento dell’unità al PC causa di solito la creazione di diverse unità disco virtuali, ognuna corrispondente a uno slot. E’ quindi possibile, eventualmente,
usare il comando “espelli” o “rimuovi” sul solo drive
virtuale corrispondente allo slot da cui si desidera
estrarre la scheda flash.
Alcuni prodotti interni, più rari, possono essere
visti attraverso una connessione IDE simile a quella
degli hard disk drive e non richiedono questa procedura, tuttavia prima di rimuovere la scheda è sempre bene essere ben certi che non sia in corso alcuna
scrittura su di essa.
Controller RAID
Uno dei principali problemi da risolvere nei sistemi impiegati su attività critiche per l’azienda è quello della “disponibilità”, ossia la capacità del sistema di fornire sempre le proprie prestazioni, anche
a fronte di guasti parziali. Questo è particolarmente
importante per quanto riguarda i dati e i dispositivi
di memoria di massa destinati a contenerli. Effettuare regolarmente dei backup è d’aiuto per garantirsi di non perdere “troppi” dati in caso di guasto di
un disco (si perderanno al massimo i dati aggiunti o
30
IT administrator - Hardware
modificati dopo l’ultimo backup); previa esecuzione
della procedura di restore sarà possibile ripristinare
i dati a una situazione precedente, ma questo processo richiede tempo e normalmente viene eseguito da
operatori umani, dopo aver studiato il danno e deciso il da farsi. Non si tratta quindi, propriamente, di
“disponibilità”. Una vera e propria disponibilità dei
dati si può assicurare mantenendo costantemente
aggiornata, su unità disco fisiche supplementari, su
spazio disco ridondato o con altre tecniche, una “copia calda” dei dati, pronta a subentrare alla copia primaria in caso di eventuale guasto al disco principale
(mirroring). In questo modo il sistema di storage è in
grado non solo di “sopravvivere” a un guasto parziale, ma addirittura di nasconderne gli effetti (a parte
la doverosa segnalazione del malfunzionamento verificatosi, che deve essere subito inoltrata all’amministratore di sistema per consentirgli di sostituire
l’unità guasta).
Un problema del tutto diverso, ma che trova soluzioni concettualmente simili, è quello dell’aumento delle prestazioni del sistema dischi di un server.
Una possibile soluzione per l’aumento di prestazioni consiste nell’acquisto di dischi di modello più veloce, ma il costo lievita in modo rapidissimo, senza
contare che la differenza di prestazioni fra un disco
“veloce” e uno “velocissimo” non è certo di ordini di
grandezza, ma di poche decine di punti percentuali.
In alternativa si potrebbe installare un enorme quantitativo di cache memory, ma anche in questo caso il
costo sarebbe elevato e per archivi di enormi dimensioni, che devono essere spesso riletti per intero per
condurre ricerche o elaborazioni su larga scala, la cache non aiuta più di tanto (a meno di renderla grande
quanto il disco stesso).
In questo caso è possibile ricorrere a uno schema
in cui un singolo disco di grandi dimensioni viene sostituito da un gruppo di dischi di dimensioni più piccole che lavorano in parallelo, in modo concertato.
Quando il sistema richiede di leggere 100 megabyte
di dati dal sistema dischi, si fa in modo che 50 vengano letti dal disco fisico A e gli altri 50 dal disco fisico
B; i dati letti dai due dispositivi vengono “riuniti” dal
controller e spediti al PC come se provenissero da un
disco unico di velocità doppia (striping). Il tempo di
lettura viene esattamente dimezzato e il sistema operativo non si è accorto della differenza.
Prestazioni e sicurezza delle diverse configurazioni
La tabella a pagina seguente (tabella 5) sintetizza le
configurazioni Raid, le prestazioni e applicazioni.
Una proprietà essenziale dei sistemi RAID è quella
di supportare il cosiddetto hot swapping ossia la possibilità di sostituire durante il funzionamento un’unità disco guasta, senza fermare né il sistema dischi né
il computer.
Se infatti fosse necessario fermare il sistema operativo per cambiare il disco rotto si vanificherebbe il
beneficio dato dall’architettura RAID in termini di disponibilità del sistema.
La possibilità di hot swapping è quasi sempre offerta dei sistemi RAID implementati in hardware, mentre non è possibile con i sistemi RAID emulati via software, a meno che il sottostante controller hardware (non-RAID) dei dischi non supporti di per sé l’hot
swapping, cosa che non è mai verificata, ad esempio,
nel caso dei comuni dischi IDE (P-ATA).
Da segnalare la capacità di Windows XP Professional di supportare direttamente il mirroring di due dischi IDE via software. Microsoft chiama questa funzione Gestione dischi dinamici: è amministrabile dal
Pannello di Controllo, Strumenti di Amministrazione,
PC Open 125 Luglio/Agosto 2007
29 - Un lettore interno
di schede multiformato
installabile in un vano
da 3.5” al posto di un
floppy drive. Questo
tipo di dispositivi in
genere richiede una
connessione USB interna
su motherboard e spesso
offre sul frontale una
comoda “replica” della
porta USB stessa
1.8.9 Controller RAID
1.8.9.1 Conoscere
le modalità di
configurazione
RAID: prestazioni e
sicurezza
1.8.9.2 Conoscere la
modalità hot-swap
30 - Un controller
RAID su scheda PCI
con supporto per il
collegamento di quattro
unità IDE P-ATA
IT administrator - Hardware
Lezione 6
Tabella 5 - Configurazioni RAID
Nome Numero
schema minimo
RAID di dischi
Descrizione
Ridondanza
Prestazioni
Fault Tolerance
Applicazioni idonee
0
2
Striping (parallelismo senza
ridondanza)
Nessuna
Aumentano grazie al
parallelismo fra dischi,
controller e canali DMA
Nessuna
Applicazioni ad alta
intensita’ di banda, per
es. applicazioni video.
1
2
Mirroring + Duplexing
100%
Richiede 2N drive
Su ogni tandem: raddoppiano
in lettura, invariate in scrittura
Elevata. A certe
condizioni sono
sopportabili guasti
multipli simultanei
Applicazioni che
richiedono alta
disponibilità
2
-
3
3
4
3
5
3
6
4
10
4
50
5
0+1
4
Elevato ma minore di
Aumento delle prestazioni
Non e’ commercialmente
RAID 1. Interi dischi
Corregge al volo
read/write direttamente
conveniente a causa
Parallelismo + codici a
sono dedicati alla
proporzionale al parallelismo errori singoli in una
dell’elevata ridondanza
correzione d’errore (ECC)
memorizzazione dei codici esistente sul gruppo dei
“parola” dati
hardware
ECC
dischi dati
Aumento delle prestazioni
Parallelismo + parita’ XOR
Applicazioni ad alta
Corregge al volo
in lettura direttamente
Basso
a livello di stripe (generata
intensita’ di banda con
gli
errori
senza
rallentare
proporzionale
al
parallelismo
durante le scritture, verificata Richiede N+1 drive
requisiti di disponibilità
il servizio
esistente sul gruppo dei
durante le letture)
dischi dati
La granularità a livello di
blocco fa sì che ogni richiesta
di lettura o scrittura interessi
Parallelismo + parita’ a livello
un solo disco. Ciò permette La correzione degli errori Applicazioni RAID 3
di blocco (generata durante
Basso
potenzialmente di trattare ha le stesse potenzialita’ bisognose di un aumento
le scritture, verificata durante Richiede N+1 drive
di RAID 3 ma avviene di prestazioni soprattutto
più richieste in parallelo,
le letture)
in lettura
piu’ lentamente
cosa impossibile con RAID
3. Il singolo disco per la
parità diventa però il collo di
bottiglia (specie in scrittura)
La correzione degli errori
ha un impatto moderato
File servers
Parallelismo + informazioni di
sulle prestazioni. In caso
Basso
Massime
prestazioni
in
Application servers
parita’ distribuite fra i dischi
di
guasto
a
un
disco
la
Richiede N+1 drive
lettura; medie in scrittura
Web servers
dati
sua ricostruzione e’ piu’
Database servers
difficoltosa che in altri
schemi
Estrema
protezione e
Prestazioni elevate a
Superiore all’overhead
Parallelismo + parita’
Applicazioni mission
condizione che il controller sia sicurezza con il minimo
richiesto da RAID 5.
distribuita fra i dischi + ECC
critical
veloce a generare e verificare overhead possibile.
Richiede N+2 drive
distribuiti fra i dischi
Resiste anche a due
i codici ECC
guasti di disco simultanei
Applicazioni ad alte
I dati sono gestiti in striping
Veloce come un RAID 0 ma Sicuro come un RAID 1
prestazioni con requisiti di
Richiede 2N drive
su un tandem e in mirroring
piu’ affidabile
ma
piu’
veloce
disponibilità
su un secondo tandem.
Abbinamento di uno schema
Prestazioni elevate come in Sicuro come un RAID 3
Molto elevata
RAID 3 e di uno RAID 0
RAID 0
ma piu’ veloce
Applicazioni che
Come RAID 5
Mirroring di due tandem i cui
Prestazioni elevate come con Un singolo guasto rende richiedono alte prestazioni
Richiede 2N drives
l’intero array equivalente ma non necessariamente
dischi sono gestiti in striping
RAID 0
a uno schema RAID 0 la massima disponibilità
1.8.9.3 Conoscere i
controller RAID con
interfaccia PATA
1.8.9.4 Conoscere i
controller RAID con
interfaccia SATA
1.8.9.5 Conoscere i
controller RAID con
interfaccia SCSI
Gestione Computer, Gestione Disco e consente di avere “gratis” un minimo livello di protezione dei dati, a
condizione di avere due o più dischi installati (meglio
se dello stesso tipo).
La capacità di creare e amministrare gruppi RAID
interamente a livello software, sia con dischi SCSI
sia con dischi IDE, è peraltro presente anche in Linux, in genere sulle versioni basate su kernel 2.4 o
superiore.
Controller RAID con interfaccia PATA, SATA e SCSI
I controller RAID hardware possono supportare
vari tipi di interfacce per quanto riguarda le unità disco. Quelli specifici per sistemi x86 (desktop o server
che siano) sono ovviamente adattati all’“ecosistema”
tipico dei PC, pertanto la maggioranza dei prodotti, e
specialmente quelli di fascia bassa, supportano l’interfaccia IDE, nelle varianti P-ATA o S-ATA; quest’ulti-
ma si sta rapidamente imponendo come la più diffusa, anche grazie alle ottime prestazioni e alla capacità
nativa di supportare l’hot-plugging (ossia la prerogativa di rimuovere e sostituire un disco a caldo), una
caratteristica irrinunciabile in un sistema RAID hardware di livello professionale.
Gli attuali prodotti di fascia alta affiancano di solito S-ATA con SAS (Serial Attached SCSI) oppure, più
raramente, supportano solo quest’ultimo. L’interfaccia SAS offre prestazioni migliori e solitamente viene
realizzata mediante una scheda che si aggiunge al
controller S-ATA di base.
Quanto al numero di unità disco collegabili, si va
dalle 2 unità dei sistemi entry level fino alle 16 unità
e più dei sistemi “top” destinati all’impiego su macchine di classe server dotate dello spazio e della ventilazione adatta per installare un così gran numero di
unità disco.
PC Open 126 Luglio/Agosto 2007
IT administrator - Hardware
Materiale didattico
progettato per EUCIP
IT Administrator
segnalato da AICA
Modulo 1 - Hardware
“AICA, Licenziataria
esclusiva in Italia
del programma
EUCIP (European
Certification
of Informatics
Professionals)
riconosce che il
materiale didattico
segnalato è
strutturato in
modo coerente con
l’organizzazione dei
contenuti prevista
dai documenti
EUCIP di riferimento.
Di conseguenza
AICA autorizza sul
presente materiale
didattico l’uso
dei marchi EUCIP
(registrato dal CEPIS
Concil of European
Professional
Informatics
Societies) ed AICA
protetti dalle leggi
vigenti.”
1.9 Memorie di
massa.
1.9.1 Concetti
1- Nonostante il
travolgente successo
delle memorie di massa
a semiconduttore a stato
solido (flash memory)
che stanno occupando
la fascia bassa del
mercato, ancor oggi
l’hard disk a tecnologia
magnetica rappresenta
“la” memoria di massa
per antonomasia
2 - I formati Blue Ray e
HD-DVD sono i più recenti
rappresentanti di questa
tecnologia.
3 - Le memorie flash,
basate su tecnologia
a semiconduttore e
quindi a stato solido,
stanno aumentando la
capacità sia in assoluto
sia a parità di costo,
estromettendo le
memorie magnetiche
dalla fascia bassa del
mercato. Qui vediamo un
esempio di scheda SD da
ben 8 GB
Lezione 6
A scuola con PC Open
Memorie di massa
ottiche e magnetiche
Dai dischi fissi alle memorie flash ai supporti ottici, una
panoramica sui sistemi per l’immagazzinamento di dati
su PC. Seguiamo l’evoluzione tecnologica al crescere
delle capacità, tra gli scontri commerciali per imporre
un particolare standard di riferimento di Marco Mussini
ella terza puntata abbiamo parlato del ruolo fondamentale che le memorie di ogni tipo ricoprono
nell’architettura dei calcolatori rendendo possibile il loro funzionamento.
Senza dubbio la memoria di lavoro RAM, quella
cioè in cui risiedono i programmi durante la loro esecuzione, è assolutamente necessaria perché il microprocessore possa eseguire applicazioni software; grazie alle sue caratteristiche di elevate prestazioni (e
in particolare al suo tempo di accesso basso e indipendente dall’ordine di accesso ai dati) la RAM è presente in tutti i PC ed è il “partner” più stretto della
CPU nell’elaborazione dei dati e nell’esecuzione delle istruzioni.
Vi è però anche un secondo tipo di memoria, con
funzioni e caratteristiche differenti, che è comunque
presente in quasi ogni tipo di sistema informatico: è
la memoria di massa, quella che si incarica dell’immagazzinamento a lungo termine di grandi quantità
di dati e programmi anche a computer spento (figura
1). Quando servono, questi dati o questi programmi
vengono trasferiti in RAM e può iniziare la loro elaborazione a opera della CPU. Se la quantità di RAM montata su un PC attualmente è dell’ordine del Gigabyte,
la memoria di massa dello stesso PC potrebbe essere
centinaia di volte maggiore. Il costo per Gigabyte, però, è molto inferiore nel caso della memoria di massa,
cosicchè un’unità disco da 400 Gbyte può avere un
N
Calendario delle lezioni
Lez. 1: la scheda madre e il BIOS
Lez. 2: i processori
Lez. 3: la RAM
Lez. 4: bus e risorse di sistema
Lez. 5: interfacce (prima e seconda parte)
Lez. 6: memorie di massa
Lez. 7: dispositivi di visualizzazione
Lez. 8: le stampanti
Lez. 9: hardware di rete
Lez. 10: alimentatori e installazione nuovo
hardware
Lez. 11: risoluzione dei problemi
PC Open 98 Settembre 2007
PDF DEL CORSO
NEL DVD
1
2
costo paragonabile a quello di
un singolo modulo di RAM da
1 Gbyte: una differenza di costo di 2 o 3 ordini di grandezza.
La ragione del costo molto inferiore delle memorie di massa rispetto a quello delle memorie di lavoro
sta nella differente tecnologia costruttiva, che punta
fra l’altro a massimizzare la capacità più che le prestazioni.
Poiché le memorie di massa devono mantenere i
dati immagazzinati anche in assenza di alimentazione,
esse si affidano necessariamente a fenomeni capaci di
creare stati fisici stabili che possano essere fatti corrispondere a stati logici distinti
(in sostanza, il bit 0 e il bit 1) 3
e quindi usati per rappresentare le informazioni.
Tipicamente quindi le memorie di massa non si basano
su un principio di funzionamento elettronico che richieda alimentazione, ma si affidano invece al magnetismo (è il
caso dei dischi fissi e dei floppy disk), all’ottica (CD-ROM,
Lezione 6
DVD-ROM, Blue Ray – Figura 3) o a fenomeni elettrostatici o elettronici che però siano in grado di sostenersi per lunghi periodi senza richiedere l’apporto di
energia (è il caso delle memorie EEPROM e Flash – figura 4). Naturalmente, il requisito del mantenimento
dell’informazione senza alimentazione riguarda soltanto i periodi di inutilizzo del PC. Durante il funzionamento di queste memorie, per l’accesso in lettura o in
scrittura, è sempre necessario fornire energia, sia che
questa serva per mettere in rotazione un disco o per
muovere le testine, sia che occorra per consentire il
funzionamento dell’elettronica di controllo.
Gli avanzamenti delle Flash memory
Negli ultimi anni i progressi dell’elettronica hanno
iniziato a rendere tecnologicamente realizzabili memorie a semiconduttore (Flash memory) con prestazioni intermedie fra quelle della RAM e quelle dei dischi fissi e capacità di diversi Gbyte, ottimamente resistenti a sollecitazioni meccaniche e magnetiche.
Nel medio-lungo termine è del tutto plausibile che
questa tecnologia soppianterà quella magnetica nelle memorie di massa, così come decenni fa la tecnologia magnetica soppiantò la tecnologia di schede e
nastri perforati nonostante il costo inizialmente ben
superiore. Il paragone con le due situazioni può risultare illuminante.
Anche il più rudimentale dei primi hard disk, all’epoca della sua introduzione sul mercato, era qualitativamente superiore a una bobina di nastro o a un
pacco di schede: non soltanto l’affidabilità e la silenziosità erano superiori, grazie alla riduzione e semplificazione delle parti meccaniche, ma anche la densità spaziale delle informazioni era maggiore; inoltre,
aspetto fondamentale, la nuova tecnologia si prestava
meglio ad accessi non sequenziali alle informazioni in
quanto il complesso disco+testine riesce a raggiungere la posizione delle informazioni richieste in un tempo che, pur variando a seconda di tale posizione, si
mantiene comunque piccolo (dell’ordine delle decine
di millisecondi al massimo); con un nastro perforato
o un pacco di schede perforate le macchine di lettura potevano dover lavorare per il riposizionamento
anche per decine di secondi prima di poter accedere
all’informazione desiderata. La nuova tecnologia introduceva quindi un miglioramento di diversi ordini
di grandezza nel tempo medio d’accesso, un vero e
proprio salto di qualità che le memorie di massa preesistenti non avrebbero mai potuto compensare in modo economicamente fattibile. Questo bastò a fissare
un trend a favore delle memorie di massa magnetiche
e ad avviare un inevitabile processo di declino delle
tecnologie dell’epoca, che sparirono completamente
nel giro di pochi anni.
Alcuni aspetti dell’attuale confronto tra la tecnologia Flash e quella magnetica/ottica ricordano lo scenario appena descritto.
Le memorie flash, del tutto prive di parti in movimento, resistono benissimo agli urti (che farebbero
“atterrare” la testina di un hard disk, rovinando irreparabilmente la superficie dei piatti). Non contengono motori che debbano essere avviati all’accensione
e alimentati durante il funzionamento, quindi hanno
un tempo d’accensione trascurabile e un bassissimo
consumo di corrente in esercizio. Non contengono
armature, telai o meccanismi metallici, quindi hanno
una massa e un ingombro minimi e sono praticamente immuni a shock inerziali, vibrazioni, oscillazioni
(che farebbero “saltare” la traccia in un CD o danneggiare i cuscinetti di rotazione in un hard disk). Non si
avvalgono di proprietà magnetiche dei materiali per
memorizzare l’informazione, quindi sono immuni ai
IT administrator - Hardware
forti campi magnetici statici. Nemmeno si avvalgono
di proprietà ottiche dei materiali, pertanto non vanno incontro a un decadimento delle loro proprietà in
caso di esposizione a forte luce solare. La loro produzione non richiede di fabbricare e assemblare con
precisione meccanismi miniaturizzati (come i delicati servomeccanismi che controllano il braccio testine
di un hard disk oppure quelli che assicurano l’allineamento alla traccia ottica in un CD o DVD), ma soltanto di produrre chip e di “inscatolarli” in involucri plastici, con una tecnologia economica e adatta a grandi
volumi di produzione. Occupano un volume minimo
e hanno un peso quasi trascurabile, quindi comportano costi di trasporto e magazzinaggio molto minori.
Il loro tempo d’accesso alle informazioni è ancora più
basso di quello degli hard disk e delle unità ottiche,
in quanto non è più necessario attendere il riposizionamento di una testina o la rotazione di un disco, e
risulta sostanzialmente indipendente dalla sequenza
di accesso alle informazioni.
Gli svantaggi delle memorie di massa a semiconduttore (in particolare le Flash memory), che la tecnologia sta già mostrando di poter col tempo compensare, sono costituiti da:
• un costo per Gbyte ancora elevato, che però è già diventato competitivo con quello degli hard disk solo
sulle piccole capacità;
• una possibile sensibilità a certe radiazioni elettromagnetiche in grado di alterare lo stato di carica
delle celle;
• una capacità ancora non in linea con i valori raggiungibili con la tecnologia hard disk, almeno a parità di costo;
• una longevità del dispositivo che, sebbene stia rapidamente migliorando, non sembra ancora eguagliare quella delle memorie magnetiche a disco. Le
flash memory più affidabili normalmente dichiarano che le celle di cui sono composte possono sopportare circa un milione di cicli di cancellazione e
riscrittura; apposite tecniche di controllo fanno in
modo di utilizzare a rotazione tutte le locazioni della flash memory per evita4
re di concentrare l’usura
sempre sugli stessi settori, ma rimane comunque il
dato di una durata del dispositivo ancora piuttosto
limitata.
• una durata di mantenimento dell’informazione che si
misura in alcuni anni.
In considerazione delle
loro proprietà, al momento
le memorie flash risultano
quindi ideali:
• per le applicazioni in dispositivi mobili, in cui generalmente non occorrono capacità enormi ma contano molto leggerezza, robustezza, immunità alle vibrazioni,
5
bassi consumi elettrici e miniaturizzazione
(figura 5);
• per le applicazioni in ambienti em-
PC Open 99 Settembre 2007
4 - Nei dispositivi
mobili miniaturizzati
come i riproduttori
multimediali le flash
memory rappresentano
la soluzione ideale per
lo storage, se non è
richiesta una capacità
eccessivamente grande
5 - I dischi ibridi
abbinano un hard
disk magnetico di
elevata capacità (per
esempio 160 GB), ma
relativamente lento,
a un banco di flash
memory, molto veloce ma
relativamente piccolo (per
esempio 256 MB). Questi
dischi contribuirebbero ad
aumentare le prestazioni
di Vista
IT administrator - Hardware
6 - Geometria di una
unità a disco fisso.
Le informazioni sono
registrate in settori
organizzati lungo tracce
concentriche su un
certo numero di dischi
(“platter”) disposti in pila,
ognuno registrato su due
facce. Un cilindro è dato
dall’insieme delle tracce
di un certo diametro su
tutti i dischi. Il gruppo
testine è dotato di un
braccio e una testina per
ogni faccia. Tutti i dischi
ruotano insieme e tutte
le testine si spostano
insieme
bedded (integrazione in dispositivi hardware anche
di natura non informatica) in cui contano consumi
elettrici, dissipazione di calore, ridotte emissioni
elettromagnetiche e immunità alle emissioni dello
stesso tipo prodotte dal resto del dispositivo;
• in combinazione con i dischi fissi magnetici tradizionali, per costruire unità “ibride” (figura 6) in cui
la flash fornisca velocità di accensione, basso tempo d’accesso e persistenza dei dati garantita in caso di spegnimento, con proprietà intermedie fra la
normale cache RAM, velocissima ma volatile, e il disco magnetico, persistente ma lento; lo stesso Windows Vista, con la tecnologia ReadyBoost, prevede
espressamente l’uso di questa nuova tipologia di dischi fissi in cui di fatto vengono usati in modo sinergico tre tipi diversi di tecnologie di memoria (RAM,
Flash e Hard disk) per realizzare un sistema che si
accenda istantaneamente, non perda dati in caso
di spegnimento improvviso e possieda un’enorme
capacità, un throughput molto elevato e un tempo
medio d’accesso basso e quasi indipendente dalla
modalità d’accesso (sequenziale o casuale).
I dischi fissi, invece, risultano ancora superiori (almeno per il momento):
• nelle grandi e grandissime capacità (dalle centinaia
di Gbyte fino al Terabyte e oltre);
• nel transfer rate, specie su unità da 15.000 giri/minuto, che può arrivare a circa 75-100 Mbyte/s nei modelli più sofisticati e veloci, contro i 20-30 Mbyte/s
delle flash card più veloci (come i modelli 200x);
• nella durata di immagazzinamento delle informazioni.
Le unità ottiche, che anni fa sembravano possedere quel “quid” in grado di assicurare un salto qualitativo, rispetto agli hard disk, nella densità di registrazione e quindi nella capacità raggiungibile, col tempo
sono state sorpassate dai progressi della tecnologia
magnetica. Oggi il tipo di memoria ottica destinata a
un mercato di largo consumo con la più alta capacità
e densità è il Blu-ray, che su un singolo disco doppio
strato da 12 cm può memorizzare 50 GB.
Un valore notevole, ma largamente superato dai
valori raggiungibili dalle più recenti unità hard disk
che hanno ormai raggiunto il Terabyte (anche se per
la verità simili valori sono raggiunti registrando le informazioni su un set di diversi piatti, come vedremo).
Per quanto riguarda la capacità, quindi, gli hard disk
sono al momento “imbattuti”.
Il principale vantaggio delle memorie ottiche sta
nel fatto che il supporto fisico è rimovibile e fabbricabile a basso costo e in grandi volumi e quindi si presta bene come mezzo di distribuzione dei contenuti.
Se un film in alta definizione richiede 40-50 GB di dati,
lo si può distribuire sotto forma di Blu-ray disc; non
sarebbe evidentemente praticabile distribuirlo memorizzato su hard disk da 50 GB.
1.9.1.1 Conoscere
le modalità di
funzionamento e
archiviazione delle
unità. Comprendere
l’accezione dei
termini: traccia,
settore, cilindro,
cluster, CHS.
Le modalità di funzionamento e archiviazione
delle unità
Le memorie di massa a disco leggono e scrivono le
informazioni posizionando accuratamente una testina o un gruppo ottico sulla superficie di un disco in rapida rotazione. Le informazioni sono disposte su tutta
la superficie del disco (o meglio, su tutta la superficie
di una corona circolare che occupa gran parte della
superficie del disco). Per raggiungere un determinato
dato, quindi, occorre che la testina si trovi alla giusta
distanza dal centro e che il disco si porti alla posizione angolare necessaria.
Del primo aspetto si occupano i servomotori passo-passo o le bobine che spostano la testina di lettu-
PC Open 100 Settembre 2007
Lezione 6
6
ra/scrittura; il sistema oggi più usato si basa appunto
su bobine (sistema “voice coil”) che, sotto il controllo
di appositi circuiti analogici di precisione, consentono un posizionamento rapido e preciso eliminando le
inerzie che sarebbero altrimenti causate da un motore e da un treno di ingranaggi.
Per quanto riguarda invece l’angolo di rotazione,
è sufficiente attendere il tempo necessario perché il
continuo movimento del disco lo porti nella posizione desiderata. L’elettronica di controllo del disco, perfettamente sincronizzata con il motore di rotazione,
è in grado di calcolare con precisione questi tempi e
sa, quindi, in quale intervallo di tempo deve iniziare
l’ascolto dei segnali rilevati dalla testina per leggere
i dati dei settori richiesti. Ogni cilindro è infatti suddiviso in un certo numero di “archi di circonferenza”,
dando luogo a regioni ben identificate (dette “settori”
o “blocchi”) nelle quali viene memorizzata una quantità standard di dati. Negli hard disk settori hanno generalmente una capacità di 512 bytes (figura 7). Da
un punto di vista operativo conviene però indirizzare
porzioni di dati più grandi. Gruppi di settori (cluster)
possono così essere indirizzati come blocchi “logici”
di dimensione maggiore di quella dei blocchi “fisici”.
Mentre le unità hard disk utilizzano un sistema con
un certo numero di tracce concentriche (dette anche
“cilindri”), i CD-ROM e i DVD-ROM utilizzano un’unica
traccia a spirale che inizia al centro del disco e termina alla sua periferia. I settori (che hanno una capacità
maggiore di quella degli hard disk: in un CD-ROM ogni
settore contiene 2.048 bytes) sono quindi numerati
sequenzialmente nell’ambito di quest’unica traccia.
Fa eccezione il più raro formato DVD-RAM, che non
tutti i masterizzatori supportano, nel quale il sistema
di organizzazione delle tracce è invece simile a quello di un hard disk.
Nelle unità ottiche con dischi da 5 pollici, per evitare di sprecare capacità di registrazione, i dati vengono
registrati nella traccia con densità lineare costante:
ogni settore occupa quindi una certa lunghezza fissa
lungo la traccia. Questo significa che nel primo tratto
della traccia a spirale, quella vicina al centro, in una
rotazione completa del disco potranno trovare posto
meno settori rispetto alla parte periferica del disco.
Pertanto, se il drive fa ruotare il disco a velocità angolare costante (Constant Angular Velocity – CAV), la velocità di lettura dei dati (in byte al secondo) sarà 2 o 3
volte maggiore alla periferia del disco rispetto al centro del disco. Per mantenere prestazioni press’a poco
costanti qualunque sia la regione di disco letta, quindi, non resta che variare la velocità angolare di rotazione in modo tale da mantenere costante la velocità
lineare della testina sulla traccia. Questa modalità è
detta Constant Linear Velocity (CLV). Il motore di rotazione dovrà accelerare durante la lettura della regione centrale e rallentare durante la lettura della perife-
Lezione 6
7
ria del disco. Il throughput diventa indipendente dalla
posizione della testina, ma solo dopo qualche istante
di assestamento, in quanto queste accelerazioni/decelerazioni che devono essere effettuate dal motore
quando la testina si sposta richiedono un certo tempo (figura 8).
Per aumen8
tare la capacità dei dispositivi hard disk i
produttori fanno uso di un
gruppo di dischi che sono
fatti ruotare
contemporaneamente sullo stesso asse,
con una testina di lettura/scrittura per ogni disco (o
per ogni faccia, nel caso di dischi registrati su entrambe le facce).
Questa è la ragione per cui le “famiglie” di modelli di hard disk di un determinato produttore hanno
spesso capacità che sembrano essere multipli di un
fattore comune. Per esempio, una famiglia i cui modelli hanno capacità di 15, 30, 45, 60 Gbyte impiega
molto probabilmente una tecnologia di registrazione
che consente di stipare 15 Gbyte su ogni singolo disco; i modelli citati differiscono semplicemente per il
numero di dischi o facce impiegati. In effetti, quando
un produttore lancia una nuova famiglia di hard disk,
vi è spesso l’annuncio dell’introduzione di una nuova
tecnologia che consente di aumentare la densità di registrazione. Con riferimento all’esempio appena proposto, una nuova famiglia potrebbe impiegare piatti
da 20 Gbyte e così comprendere modelli da 20, 40, 60
e 80 Gbyte a parità di struttura meccanica macroscopica (da 1 a 4 piatti come nella famiglia precedente).
Ricapitolando, l’indirizzamento dell’informazione
in un hard disk richiede, in generale, di specificare
quale testina (head) utilizzare; a quale distanza dall’asse di rotazione del disco posizionarla, o, in altri
termini, su quale cilindro (cylinder); in quale posizione angolare del disco, ovvero in quale settore (sector)
di quel cilindro.
La strutturazione dei dati in un disco floppy
Il più noto tipo di memoria di massa magnetica con
supporto rimovibile è il floppy disk. Ormai chiaramente entrato nella sua fase di declino definitivo, sostituita dalle ben più capaci, veloci e pratiche “chiavette
USB” basate su memorie flash, questo tipo di periferica resiste ancora nei desktop e
nei laptop più datati. In ambito 9
musicale, tuttavia, ancor oggi
molti apparecchi comprendono un drive per floppy disk da
3.5 pollici per il trattamento di
dati MIDI come basi musicali o
IT administrator - Hardware
10
11
registrazione di esecuzioni dal
vivo.
Il
nome “floppy
disk” (disco flessibile) risale
in realtà all’epoca (inizio anni ’70) in cui i dischi usati avevano
un diametro di ben 8 pollici e il loro involucro era una
sorta di sottile busta quadrata di materiale plastico
nero flessibile.
Dopo la metà degli anni ’70 fecero la loro comparsa
i più trasportabili floppy disk da 5.25 pollici (figura 9).
(La leggenda vuole che la bizzarra dimensione di 5.25
pollici sia stata scelta dagli inventori dello standard
prendendo come riferimento un tovagliolo di carta
trovato al bar durante una discussione sul formato da
adottare). Questi, partendo da una prima generazione
da 360 Kbytes adottata dai primi IBM PC, arrivarono
a supportare una capacità di 1.2 Mbytes formattati,
passando attraverso modelli a singola faccia, doppia
faccia, alta densità. I dischi potevano essere registrati
su entrambe le facce; per usarli in un drive a singola
faccia, dovevano essere estratti e rovesciati, proprio
come per un disco musicale in vinile. Successivamente, negli anni ’80, fu la volta dei dischi da 3.5 pollici
(figura 10), tutti a doppia faccia, con capacità da 720
KBytes (singola densità: SD), 1.44 Mbytes (alta densità: HD) e 2.88 Mbytes (il più raro formato ED), che per
la prima volta adottarono un involucro plastico rigido
quadrato con protezione della finestrella di accesso
alla superficie del disco. Questo formato inventato
da Sony incontrò grande successo dopo essere stato
adottato da Apple per i primi Macintosh, ma anche
per la sua maggior affidabilità data dall’assenza di superfici magnetiche permanentemente esposte a polvere e graffi, e rappresenta l’ultima evoluzione “standard” dei microfloppy. Il poco conosciuto formato da
3 pollici (figura 11), con involucro plastico ultrarigido
di forma rettangolare e finestrella di protezione ancora più sicura di quella dei microfloppy da 3.5 pollici,
ebbe vita brevissima, principalmente per il fatto di
non essere stato adottato come standard dai PC, e fu
impiegato, per esempio, su alcuni home computer e
macchine dedicate per word processing di Amstrad.
12
13
14
In realtà un erede dei
floppy disk da 3.5 pollici è
esistito, e per alcuni anni
ha prolungato la carriera (o
forse, per meglio dire, l’agonia) delle memorie di massa magnetiche rimovibili. Si tratta dei noti standard
proposti drive ZIP e JAZ (figure 12 e 13), in grado di
stipare (nelle rispettive versioni iniziali) 100 Mbytes
e 1 Gbyte su singolo supporto rimovibile. Dal punto
di vista strettamente tecnologico il drive ZIP era imparentato con la tecnologia dei floppy disk, mentre il
JAZ era più propriamente da paragonarsi a un hard
PC Open 101 Settembre 2007
10 - Un floppy disk da
3.5”, alta densità (HD),
da 1.44 Mbytes.
11 - Un raro disco da 3
pollici. Questo formato
fu utilizzato in pochissimi
sistemi
7 - In un disco con dati
registrati a velocità
angolare costante, o CAV,
(a sinistra) un settore
richiede sempre lo stesso
tempo per passare sotto
la testina di lettura/
scrittura, ma i settori
sulle tracce più esterne
sono registrati con una
densità molto bassa
che spreca buona parte
della capacità potenziale
del disco; al contrario,
sulle tracce interne i
dati sono registrati ad
alta densità e questo
potrebbe avvicinare il
limite teorico di densità
possibile con i materiali
e le testine impiegati. Un
disco registrato a velocità
lineare costante, o CLV
(a destra), utilizza una
densità di registrazione
costante e sfrutta al
meglio la capacità del
disco.
Fonte www.telcontar.net
8 - Le unità hard disk
impiegano internamente
una “pila” di dischi per
aumentare la capacità.
I dischi vengono letti
e scritti da un gruppo
di testine disposte “a
pettine” che si muovono
insieme
12 - Un drive esterno ZIP
con un disco da 250 MB
13 - A differenza di
uno ZIP drive che è
imparentato con un
floppy disk, un drive
JAZ è tecnologicamente
assimilabile a un hard
disk
14 - Con l’arrivo
sul mercato dei
masterizzatori riscrivibili e
degli economici supporti
CD-RW i supporti ZIP
persero appeal
1.9.1.2 Conoscere
la strutturazione
dei dati in un disco
floppy.
9 - Un floppy disk da
5.25 pollici. Questo tipo
di dischi era realmente
flessibile a causa
dell’involucro non rigido;
di qui il termine “floppy”
IT administrator - Hardware
15 - Una tipica sessione
FDISK in azione in
ambiente Windows.
Partizionare il disco
fisso è consigliabile
per migliorare
l’amministrazione
di dischi di grandi
dimensioni, e di solito è
addirittura necessario se
si intende coinstallare più
di un sistema operativo
16 - Anche sotto Linux
esistono utility equivalenti
o omonime di FDISK,
anche se col tempo sono
state rimpiazzate da più
comodi strumenti grafici.
Qui vediamo in azione la
versione fornita con la
distribution FreeBSD
disk con i soli dischi rimovibili dal corpo dell’unità.
Il loro utilizzo per finalità di backup declinò con la
comparsa sul mercato di hard disk di capacità molto
più grande, impossibili quindi da salvare su singoli dischetti, e utilizzabili anzi a loro volta come dispositivi di backup per altri hard disk a costo ragionevole e
con ottime prestazioni. Un altro fattore che contribuì
a erodere l’interesse per i drive Zip e Jaz fu la diffusione degli economici CD-RW (figura 14).
Per quanto riguarda la struttura di registrazione
dei dati, il numero di tracce e di settori per traccia ebbe qualche variante a seconda dei sistemi, del formato del disco e del livello di densità del drive. Il numero
di tracce è generalmente di 40 o 80, con l’eccezione
di alcuni sistemi nei quali, “sfidando” i limiti nominali di capacità del disco, si scrivevano ulteriori tracce,
arrivando a 1.6 MB su dischi 3.5” HD. Altri sistemi,
come il Commodore Amiga, impiegavano dischi 3.5”
a singola densità, ma registravano 11 settori per traccia anziché i canonici 9, arrivando a una capacità di
880 Kbytes anziché 720 Kbytes. Infine, in alcuni vecchi Macintosh, Apple tentò la carta di variare la velocità angolare del motore per incidere i dati a densità
lineare costante (come sui CD-ROM), allo scopo di
sfruttare meglio le tracce esterne. Con un modesto
beneficio in termini di capacità, questo sistema, che
fu presto abbandonato, richiedeva un’elettronica di
controllo e dei servomotori più precisi (e più costosi,
perché non standard).
Settori
Tracce Facce Capacità
x traccia
Single side
9
40
1
180KB
Double side
9
40
2
360KB
High Density
15
80
2
1.2 MB
Single Density
9
80
2
720 KB
High Density
18
80
2 1.44 MB
Extended Dens.
36
80
2 2.88 MB
Lezione 6
15
16
FormatoVariante
17 - Un tipico tool
grafico per la gestione
delle partizioni in
ambiente Linux (in questo
caso Ubuntu)
5.25”
5.25”
5.25”
3.5”
3.5”
3.5”
1.9.1.3 Conoscere
le modalità di
partizionamento
del disco rigido.
Conoscere
l’accezione dei
termini: unità logiche,
partizione attiva
L’importanza di partizionare il disco fisso
18 - Windows XP
offre una pratica utility
grafica, decisamente più
amichevole di FDISK,
per amministrare e
formattare i dischi e le
loro partizioni
Per sfruttare in modo più pratico e sicuro la capacità di un hard disk di grosse dimensioni è consigliabile suddividerlo nelle cosiddette “partizioni”. Lavorare con un certo numero di partizioni anziché con
un unico disco di smisurata capacità è preferibile per
diversi motivi:
• Deframmentare le partizioni richiede un tempo minore di quello necessario per deframmentare l’intero disco non partizionato.
• Un eventuale danno alle strutture di controllo del
file system comporta al massimo la perdita dei dati
della partizione interessata.
• È possibile suddividere e ordinare i dati in modo più
chiaro e facile da gestire; per esempio si può avere
una partizione per il sistema operativo, una per i
programmi e una per i dati.
• Diventa più facile la selezione dei file da trattare con
le procedure di backup.
Ogni partizione si comporta come un disco logico
indipendente dalle altre partizioni. In particolare ogni
partizione, per poter essere utilizzata per memorizzare dati, deve prima essere formattata.
Ogni partizione può essere formattata con un tipo
di file system non necessariamente uguale a quello
usato per le altre partizioni dello stesso disco: per
esempio, a seconda del tipo di dati registrati, una partizione potrebbe essere formattata in formato FAT16,
una in FAT32 e una in NTFS. Nel caso di Linux le possibilità di scelta del tipo di file system da usare per for-
PC Open 102 Settembre 2007
17
18
mattare una partizione sono ancora più ampie.
Normalmente su un disco è possibile definire fino
a un massimo di quattro partizioni, la cui descrizione è memorizzata in un’area specifica del disco stesso detta Tabella delle partizioni (Partition Table). In
ambiente MS-DOS e nei primi Windows lo strumento
Lezione 6
software per gestire il partizionamento del disco era il
comando FDISK (figura 15) (successivamente era necessario utilizzare il comando FORMAT per formattare le partizioni testé create). Con versioni più recenti
di Windows, compreso lo stesso Windows XP, è invece disponibile uno strumento di amministrazione unificato, dotato di interfaccia grafica di facile uso, che
funziona senza dover uscire dall’ambiente Windows
e consente di effettuare sia il partizionamento sia la
formattazione delle partizioni. Non è da meno Linux,
che dispone anch’esso di un’utility simile a FDISK (figura 16) ma anche di altri strumenti equivalenti, più
facili da usare in quanto dotati di interfaccia grafica
(figura 17).
In ambiente Windows la situazione è ulteriormente migliorata sotto Windows XP, in cui attraverso Pannello di controllo / Strumenti di Amministrazione / Gestione Computer / Gestione disco si può accedere a
una utility grafica chiara e comoda per amministrare
e formattare le partizioni (figura 18). Mancano solo le
funzioni che consentono di ridimensionare o fondere
partizioni senza perdere i dati in esse contenuti; queste sono in genere disponibili nelle utility commerciali (o in qualche caso gratuite) specializzate nella
gestione del disco.
Indipendentemente dal tipo di file system utilizzato
per formattarla, una partizione può essere di due tipi:
primaria o estesa.
La principale differenza sta nel fatto che all’interno
di una partizione estesa possono essere create una o
più unità disco logiche, alleviando così il disagio dato
dalla limitazione di quattro partizioni per disco. L’operazione è effettuabile direttamente da FDISK.
Solo una partizione primaria può essere resa “attiva”, ossia essere indicata come la partizione da cui
dovrà essere effettuato l’avvio (bootstrap) del sistema operativo.
Le modalità d’installazione di un’unità floppy, un
disco rigido, un drive CD-ROM
L’installazione fisica di un disco floppy, di un disco
rigido o di un’unità ottica è un’operazione concettualmente semplice a condizione che il PC disponga di un
vano di dimensioni adeguate, di una connessione di
alimentazione adatta e di una connessione dati libera
del tipo richiesto dall’unità da collegare (per esempio,
per un hard disk, P-ATA o S-ATA).
I floppy disk 3.5” utilizzano connettori di alimentazione miniaturizzati, mentre gli obsoleti dischi da
5.25”, gli hard disk e i drive ottici usano un più ingombrante connettore Molex a 4 pin che porta le tensioni
+5V e +12V (rispettivamente per l’elettronica di controllo del drive e per l’alimentazione dei motori di rotazione e di testina) con relative masse. Normalmente nel fascio di cavi che escono internamente dall’alimentatore del PC è facile localizzare i connettori di
tipo adatto per l’installazione (Figura 19). In qualche
caso i connettori presenti non corrispondono esattamente a quelli occorrenti; si può allora fare uso di
appositi cavetti adattatori per risolvere il problema
(figura 20).
Per quanto riguarda il cavo dati, su un sistema PC i
floppy disk (di solito non più di due) si collegano alla
motherboard con un cavo piatto e relativo connettore
fisicamente separati da quelli usati per dischi P-ATA,
che sono inoltre di tipo diverso: il connettore piatto
usato dai floppy disk ha 34 poli, mentre quello P-ATA
utilizzato da hard disk 3.5” e unità ottiche ne ha 40 (a
parità di numero di pin del connettore, il cavo P-ATA
può inoltre avere 40 o 80 conduttori a seconda della
versione utilizzata dello standard IDE).
Del tutto diversi, poi, i connettori S-ATA che sono
IT administrator - Hardware
19
20
molto più piccoli, con minor
numero di con21
tatti, e fanno uso di
un cavo molto meno ingombrante
dei “flat cable” PATA perché basato
su pochi conduttori (figura 21).
Ai connettori PATA o S-ATA si possono collegare indifferentemente dischi fissi o unità ottiche. Nel caso particolare di collegamenti P-ATA, che prevedono la possibilità di collegare due unità lungo lo stesso cavo, occorre prestare
attenzione all’impostazione del ruolo delle due unità.
Se il controller IDE e il cablaggio supportano la modalità cable select (CS), sarà sufficiente impostare entrambi i dispositivi sul ruolo CS per risolvere il problema. In alternativa sarà necessario assicurarsi di
averne impostato uno come master e uno come slave.
Se entrambe le unità collegate allo stesso canale IDE
sono impostate per lo stesso ruolo, oppure una di esse è impostata come CS e l’altra ha un ruolo che entra
in conflitto con quello automaticamente assunto dalla
prima, si verificheranno inconvenienti durante il funzionamento, con la possibilità di perdere dati.
Se invece lungo un cavo IDE si collega una sola
memoria di massa, non esiste il pericolo di conflitti.
Volendone specificare il ruolo, tipicamente la si configurerà come master oppure, anche in questo caso,
si potrà attivare la modalità cable select impostandola come CS.
Tutte le configurazioni relative
22
al ruolo master, slave o cable select si effettuano agendo su ponticelli (jumper) installati su un
connettore a pettine generalmente posizionato sul retro dell’unità che devono essere fisicamente
spostati nella posizione opportuna per attivare la modalità desiderata. Le istruzioni per il posizionamento
dei ponticelli sono quasi sempre stampate sulla targhetta identificativa del drive (figura 22). In rari casi
possono essere serigrafate, in modo poco evidente,
direttamente sulla scocca metallica vicino al connettore a pettine.
I cavi IDE in grado di supportare la modalità Cable
Select sono quelli a 80 pin introdotti a partire dalla revisione Ultra ATA/66 dello standard P-ATA. I connettori hanno colorazione differenziata per chiarire il ruolo che assumeranno i drive. L’estremità da collegare
alla motherboard
23
è di colore blu; il
connettore all’altra estremità, di
colore nero, serve per il collegamento dell’unità
master; il connettore in posizione
PC Open 103 Settembre 2007
19 - Il fascio di cavi che
esce da ogni alimentatore
ATX comprende il
grosso connettore di
alimentazione per la
motherboard e un nutrito
gruppo di connettori per
alimentare floppy, hard
disk 3.5” IDE, hard disk
S-ATA e schede grafiche.
In dotazione possono
esservi adattatori per
consentire di adattare
il “mix” di connettori
disponibili a quelli
occorrenti, in base alle
periferiche presenti
20 - Un adattatore di
alimentazione da IDE
3.5” a S-ATA
21 - Un cavetto dati
S-ATA. Rispetto ai classici
cavi piatti P-ATA il cavo è
molto meno ingombrante
e ostacola meno la
ventilazione nel case.
Anche il connettore ha
dimensioni miniaturizzate
1.9.1.4 Conoscere
le modalità
d’installazione di
un’unità floppy,
un disco rigido,
un drive CD-ROM.
Conoscere inoltre
quali cavi utilizzare
e come realizzare le
connessioni fisiche
22 - I diagrammi con
le istruzioni per il
posizionamento dei
ponticelli (jumper)
per la selezione delle
modalità master, slave
o Cable Select sono
generalmente stampati
sull’etichetta del drive
23 - Un cavo IDE con
connettori idonei per
la modalità “cable
select”, con colorazione
differenziata per
distinguere fra master
(nero), slave (grigio) e
connessione motherboard
(blu)
IT administrator - Hardware
1.9.1.6 Distinguere i
metodi di traduzione
in modalità
ECHS e LBA, e le
relative differenze
intercorrenti
1.9.1.5 Sapere
quante unità disco
sono supportate e le
relative impostazioni
di configurazione da
BIOS
24 - Il BIOS prevede
una schermata da cui
è possibile effettuare
il riconoscimento delle
unità disco IDE dopo
la loro installazione.
Successivamente sarà
necessario partizionarle
e formattarle operando
direttamente da Windows
intermedia, di colore grigio, serve per il drive slave
(figura 23).
Contrariamente a quanto comunemente si crede,
su una catena IDE il drive master non ha alcun “trattamento di riguardo” rispetto al drive slave. In effetti
la stessa terminologia master/slave, che può suggerire una sorta di posizione privilegiata del primo, non
viene dagli standard ufficiali ma dalla consuetudine
invalsa.
In realtà i due drive sono identificati tecnicamente come device 0 e device 1 e dal punto di vista delle
priorità sono messi assolutamente sullo stesso piano
dal controllore del canale che del resto, lo ricordiamo,
non risiede a bordo dei drive ma sulla motherboard.
La distinzione master-slave e tutte le questioni inerenti la corretta configurazione dei ruoli ovviamente
scompaiono nel caso di drive S-ATA, in cui la connessione fra motherboard e drive è di tipo “punto-punto”
e non esiste quindi la situazione in cui due drive si attestano su uno stesso cavo.
Configurazione delle unità da BIOS
In un tipico PC di qualche anno fa la motherboard
integrava un doppio controller IDE; il sistema era
quindi in grado di supportare due canali IDE, ognuno
con due periferiche collegate, per un totale massimo
di quattro unità di memoria di massa. Calcolando che
un hard disk è sempre presente ed è difficile fare a meno di un lettore CD/DVD o masterizzatore, si conclude
che generalmente le posizioni ancora libere per eventuali espansioni in questo genere di PC erano soltanto due. Per installare un numero superiore di drive PATA non restava che acquistare una scheda controller
addizionale, da installare su bus PCI.
Modelli più moderni di motherboard e di PC hanno
introdotto la tecnologia S-ATA che in questa fase sta
ancora affiancando la tecnologia P-ATA. Spesso quindi ci si trova di fronte a uno o due connettori P-ATA e
a tre o quattro connettori S-ATA, per un totale di 6-8
unità disco collegabili al sistema. Questo per quanto
riguarda il numero di unità fisiche.
Se però si tiene conto del fatto che su ogni unità
può essere creato un massimo di 4 partizioni, una
delle quali, eventualmente, può essere una partizione
“estesa” contenente un certo numero di unità disco
logiche, si vede che il numero totale di unità disco (intese come file system indipendenti) che potrebbero
essere creati può essere anche, in casi limite, di alcune decine.
Tuttavia Windows dispone al massimo di 26 lettere
per identificare le memorie di massa (di cui le prime
due, A e B, sono riservate per i floppy) e bisogna prevederne almeno una libera per avere la possibilità di
gestire eventuali pen drive flash USB o dischi esterni.
È quindi consigliabile non frammentare più del necessario i dischi in partizioni e unità logiche, trovando il
giusto compromesso caso per caso.
24
PC Open 104 Settembre 2007
Lezione 6
Il problema non esiste con Linux, dove le unità disco non sono enumerate mediante le lettere dell’alfabeto, ma “agganciate” (in gergo: montate) ad apposite
directory del file system.
Sempre riferendoci al caso più diffuso, quello di
motherboard con controller IDE di tipo P-ATA, il BIOS
prevede una schermata di riconoscimento e configurazione delle unità disco fisiche (hard disk o unità ottiche) installate nel sistema (figura 24).
Differenze tra ECHS e LBA
All’inizio di questa puntata abbiamo presentato la
logica di indirizzamento più “classica” utilizzata in
passato dalle unità hard disk.
Il sistema basato sulle tre “coordinate” (cylinderhead-sector: CHS) è detto “geometrico” ed è il più semplice da gestire per l’elettronica di controllo del disco.
Sfortunatamente, come abbiamo già accennato nella
V puntata, questo sistema, sotto il controllo del BIOS
e abbinato allo standard IDE per l’interfacciamento di
unità disco, è stato anche la causa di una serie di restrizioni di capacità che hanno afflitto i proprietari di
PC impedendo, per molti anni, di espandere oltre un
certo limite la capacità della memoria di massa installata, a meno di non effettuare un upgrade piuttosto radicale di BIOS, controller o motherboard.
Ricordiamo infatti che l’IDE può tecnicamente indirizzare 65.536 cilindri, 16 testine, 255 settori per traccia. Il BIOS, dal canto suo, può indirizzare 1.024 cilindri, 256 testine, 63 settori per traccia.
Tecnologia
16
256
256
63
Massima
capacità
indirizzabile
128 Gbyte
7.88 Gbyte
16
63
504 Mbyte
Cilindri Testine
65.536
IDE
1.024
BIOS
Combinazione
delle
1.024
restrizioni di
IDE e BIOS
Settori/
cilindro
Questi limiti valgono qualunque sia la geometria
del disco fisicamente impiegato. Inoltre, poiché il
BIOS deve comunicare con il disco attraverso il controller IDE, per ognuno dei tre parametri deve prevalere la restrizione più severa “incontrata” lungo la
“strada”.
La conseguenza è che a causa di queste limitazioni concomitanti, in assenza di accorgimenti particolari, su un sistema IDE gestito dal BIOS di un PC con il
sistema delle coordinate geometriche è possibile indirizzare, per un hard disk, al massimo 1.024 cilindri
(limite dovuto al BIOS), ognuno con 16 testine (limite
dovuto a IDE), il che corrisponde a 16x1.024=16.384
tracce, su ognuna delle quali è possibile indirizzare al
massimo 63 settori (limite dovuto al BIOS).
Il numero massimo totale di settori indirizzabili è
quindi pari a 1.032.192; poiché ogni settore contiene
512 bytes, la capacità massima indirizzabile è quindi
di 512x1.032.192=528.482.304 bytes, poco più di mezzo Gbyte. Tradizionalmente, questo valore soglia viene spesso indicato come 528 megabytes, ma poiché,
a rigore, un Megabyte è pari a 220 bytes (1.048.576
bytes), in realtà si dovrebbe, più propriamente parlare di (circa) 528 “milioni” di bytes, oppure (esattamente) di 504 Megabytes.
Quando iniziarono a comparire dischi di capacità
effettivamente prossima ai 504 Megabytes, apparve
subito chiaro che due delle tre limitazioni sopra elencate erano dovute al BIOS, e potevano essere agevolmente risolte ammodernandolo. Il primo passo fu
Lezione 6
Esempio ECHS
Anche molto prima di raggiungere il limite massimo
di 504 MB, poteva capitare che un’unità disco,
con una capacità teoricamente gestibile da BIOS
(per esempio: 2 Gbytes) avesse una geometria che
non rispettava le restrizioni concernenti i range
standard di numerazione per uno o più parametri
di indirizzamento. In questi casi, versioni recenti di
BIOS erano in grado di simulare una geometria del
disco diversa, effettuando di fatto una “conversione
di coordinate” aritmetica fra la geometria
effettivamente usata dal disco (incompatibile, per
almeno uno dei tre parametri, con i limiti BIOS) e
quella virtuale, fatta rientrare nei limiti, presentata
al sistema operativo. Questa modalità è definita
Extended CHS, o ECHS. Per esempio, un disco con
2.048 cilindri, 6 testine e 63 settori per traccia
(circa 390 MB) rientra abbondantemente nei limiti
assoluti di capacità, ma ha un numero di cilindri
eccessivo. Un BIOS con funzionalità ECHS può
quindi decidere di farlo figurare come se avesse
1.024 cilindri, 12 testine e 63 settori per traccia
(capacità risultante uguale), risolvendo il problema.
quello di svincolare i parametri geometrici CHS utilizzati dal sistema operativo nelle sue richieste al BIOS
dai parametri geometrici effettivamente corrispondenti dalla struttura fisica del disco.
Si partì dall’osservazione che nessuna unità disco
in circolazione ha mai contenuto gruppi di 128 dischi
(e quindi 256 testine): nei normali dischi PC, ben di
rado si superano i 5 dischi. L’indirizzamento del BIOS
che consentiva di specificare 256 testine era quindi perfino eccessivo per le necessità reali. Al contrario, gli altri due limiti, quello di 63 settori per traccia
e quello di 1.024 cilindri, apparivano più restrittivi e
infatti sono stati raggiunti per primi (e più presto di
quanto ci si aspettasse) a causa del rapidissimo aumento della densità superficiale di registrazione messo a segno dalla tecnologia degli hard disk.
Se la densità superficiale aumenta, sulla superficie
di uno stesso disco possono esservi più tracce e su
una traccia possono esservi più settori. Questo ha
portato, nel sistema geometrico CHS, a saturare gli
indici C e S molto prima dell’indice H.
Con appositi calcoli, BIOS e IDE iniziarono così a gestire la traduzione di un immaginario e poco realistico indirizzamento 1.024x256x63 nell’effettivo indirizzamento usato internamente dal disco: per esempio,
un più realistico 4.096x8x504 (4.096 cilindri, 4 dischi/8
facce, 504 settori per traccia). Questa “reinterpretazione” dell’indirizzamento geometrico CHS (si veda
l’esempio nel box) ha consentito almeno di sfruttare
pienamente le capacità del BIOS, innalzando il nuovo
limite a 1.024x256x63x512=8.455.716.864 bytes (circa 8,4 miliardi di bytes, più esattamente 7,875 gigabytes) guadagnando ancora qualche anno. Tuttavia
il ritmo di aumento della capacità dei dischi fissi (un
raddoppio ogni 18 mesi circa) ha reso restrittivo anche questo limite nel giro di pochi anni. Anche con
l’indirizzamento con geometria “virtuale” appena descritto, infatti, i limiti di indirizzamento del BIOS, che
complessivamente usava 24 bit per l’indirizzamento
(10 bit per i 1.024 cilindri + 8 bit per le 256 testine +
6 bit per i 63 settori per traccia) costituivano il collo
di bottiglia.
Infatti, nell’IDE i settori sono indirizzati usando
complessivamente 28 bit (16 per i cilindri + 4 per le
testine + 8 per i settori), contro i 24 bit del BIOS. Que-
IT administrator - Hardware
sto significa che con i 4 bit in più usati dall’IDE, esso
può indirizzare dischi 16 volte più grandi (24=16) di
quelli indirizzabili dal BIOS.
La piena capacità indirizzabile dall’IDE risulta infatti essere di 65.536 cilindri x 16 testine x 255 settori x
512 bytes = 136.902.082.560 bytes, ossia circa 137 miliardi di bytes (esattamente 127.5 gigabytes, poiché 1
gigabyte=230 bytes).
Per poter sfruttare tutti i 28 bit supportati dall’IDE
arrivando a gestire dischi da 137 miliardi di bytes (impropriamente indicati, per brevità, 137 GB), si procedette a una ulteriore e più profonda revisione del
sistema di indirizzamento del BIOS, in cui fu definitivamente superato il concetto di indirizzamento geometrico. Si passò infatti a un più semplice schema di
numerazione “piatta” detto LBA (Logical Block Addressing), in cui non si fa altro che numerare in modo
progressivo tutti i settori del disco, da 0 a 228, ignorando completamente su quale cilindro o testina essi si trovino.
Il limite dei 137 miliardi di bytes (128 gigabytes)
non ha costituito un grave problema per diversi anni, ma già a partire dal 2002-2003 hanno fatto la loro
comparsa i primi dischi da 160 GB o più, riaprendo la
“crisi” e costringendo a correre ai ripari. Rimossi i limiti del BIOS, superato il concetto di indirizzamento
CHS geometrico, aggiornato il BIOS per usare un indirizzamento a 28 bit, questa volta era stato davvero
raggiunto il limite intrinseco dell’indirizzamento a 28
bit dell’IDE.
Per andare oltre, quindi, è stato necessario introdurre una revisione dello standard IDE che aumentasse il numero di bit disponibili. Questa operazione
fu compiuta con il lancio dello standard ATA-6, in cui,
con una espansione quasi brutale dello spazio di indirizzamento, l’LBA fu portato da 28 bit a ben 48 bit,
aumentando di oltre 1 milione di volte la capacità
massima dei dischi utilizzabili (da 128 gigabyte a ben
134.217.728 gigabyte!). Questo dovrebbe allontanare
di molti anni il momento in cui servirà una nuova revisione dello standard!
Volendo azzardare una previsione di quando ciò
accadrà, possiamo considerare che i dischi raddoppiano di capacità ogni 18-24 mesi circa, e che il disco
IDE più grande oggi disponibile ha 750 GB di capacità. Per mandare in crisi l’LBA 48 occorre quindi che
i dischi diventino circa 180.000 volte più grandi. Se i
ritmi attuali di crescita si manterranno invariati, la crisi dovrebbe verificarsi entro 25-35 anni, fra il 2032 e il
2042. Staremo a vedere.
La formattazione e il partizionamento
Quando una memoria di massa magnetica o ottica
viene impiegata per scrivere dati, come abbiamo già
detto questi non sono scritti semplicemente in sequenza, ma sono raccolti in settori di dimensione fissa (eventualmente un settore può restare parzialmente vuoto se non ci sono sufficienti dati per occuparlo
interamente, ma la sua dimensione rimane comunque
fissa). La suddivisione in settori ha lo scopo di facilitare la gestione delle operazioni di lettura/scrittura dati da parte del controller, che si trova a gestire quantità fisse di dati e può quindi essere organizzato con
un buffer di lettura/scrittura di dimensioni conformi
a quelle di un settore (o di un cluster di un certo numero prefissato di settori). La suddivisione in settori,
inoltre, consente una più facile gestione degli errori.
Ogni settore è provvisto di una certa quantità di spazio in cui il controller può scrivere informazioni di
controllo calcolate a partire dai dati contenuti nel settore stesso, come codici a ridondanza ciclica (CRC)
o bit di parità. Durante la lettura il controller legge,
PC Open 105 Settembre 2007
1.9.1.7 Comprendere
l’accezione
dei termini:
formattazione
a basso livello,
partizionamento,
formattazione ad alto
livello
IT administrator - Hardware
1.9.1.8 Essere
al corrente
delle differenze
tecnologiche fra
standard, quali:
CD+/-R, CD+/-RW,
DVD+/-R, DVD+/-RW,
doppio strato [double
layer], raggio laser
blu [blue ray].
insieme ai dati del settore, anche tali informazioni,
che usa per verificare se i dati letti sono corretti e integri. In caso venga riscontrata una discrepanza fra
il CRC calcolato sui dati appena letti e il CRC che accompagna il settore, precedentemente calcolato sui
suoi dati e scritto su disco, si potrà concludere che si
è verificata un’alterazione o dei dati o del CRC stesso
(non è possibile dire a quale dei due). Di conseguenza
il controller tenterà una o più volte di effettuare una
rilettura dei dati, magari dopo una ricalibrazione della testina o un suo riposizionamento sulla traccia. In
caso di reiterato fallimento si concluderà che l’errore è irrecuperabile e si segnalerà errore, ma, questo
è l’aspetto fondamentale, l’errore si riferisce solo alla
porzione di dati contenuta nel settore la cui lettura è
fallita. In altre parole, se un file di 10 Mbyte fosse scritto senza la suddivisione in settori e si verificasse un
errore, sarebbe impossibile localizzare tale errore con
precisione e si dovrebbe assumere che il danno ai dati si possa trovare ovunque nel file. Grazie alla ripartizione in settori, invece, lo stesso file risulta scritto
su disco in circa 20.000 settori di 512 byte ciascuno.
Se si verifica un errore in lettura su uno di questi settori, si potrà circoscrivere esattamente la regione del
file interessata dall’errore: essendo coinvolto solo un
settore su 20.000, si tratterà dello 0,005% del contenuto del file. Il rimanente 99.995% viene identificato
come corretto.
Per poter utilizzare un disco con la citata suddivisione in settori occorre che questi siano prima preparati scrivendoli (vuoti) sulla superficie del disco.
Nel caso particolare degli hard disk e dei floppy disk,
questa operazione viene detta formattazione a basso
livello per distinguerla dalla formattazione ad alto livello che scrive le strutture dati specifiche del tipo di
file system scelto per organizzare i dati sul disco stesso (nomi di file, directory, permessi di accesso). Per i
floppy disk la formattazione a basso livello è l’operazione di formattazione che viene comunemente effettuata dall’utente (sui floppy disk in ambito PC si usa
un solo tipo di file system, per cui la formattazione
ad alto livello può essere considerata contestuale a
quella a basso livello). Alcune marche di floppy disk,
per far risparmiare tempo all’utente, offrono dischetti già formattati.
Per gli hard disk la formattazione a basso livello,
che si occupa fra l’altro di registrare sul disco speciali indicatori usati dalla testina di lettura/scrittura per
il riconoscimento delle tracce, viene sempre effettuata in fabbrica. Un hard disk nuovo di zecca quindi è
in realtà già suddiviso in settori e predisposto per la
scrittura di dati; non rimane che partizionarlo e formattarlo ad alto livello. Sottolineiamo, tuttavia, che la
formattazione a basso livello è un’operazione dal cui
successo dipende in modo critico il buon funzionamento dell’unità e non dovrebbe mai essere ripetuta
dall’utente a meno che non si siano verificati gravi e
ripetuti inconvenienti in lettura o scrittura. Anche in
questi casi, inoltre, va detto che se la superficie magnetica del disco è danneggiata o qualche altro componente è difettoso è poco probabile che una riformattazione a basso livello riesca a cancellare completamente i sintomi del malfunzionamento. Il minimo
che ci si può aspettare è che alcuni settori vengano
classificati come difettosi, ma è anche possibile che
la formattazione a basso livello non riesca affatto. In
questo caso, anziché insistere con i tentativi di formattazione a basso livello, è decisamente preferibile
sostituire il disco.
La formattazione a basso livello di un hard disk,
nei rari casi in cui può aver senso tentarla, è un’operazione che si può effettuare da BIOS (per i BIOS che
PC Open 106 Settembre 2007
Lezione 6
la supportano) oppure usando una utility fornita dal
produttore del disco.
Dopo la creazione dei settori il secondo passo logico consiste nel partizionamento del disco, di cui abbiamo già parlato. Tale operazione è necessaria anche
nel caso in cui si voglia semplicemente creare un’unica partizione grande quanto tutto il disco. Il suo effetto è quello di scrivere una “partition table” sui settori
di un’area specifica del disco.
Una volta create una o più partizioni, queste devono poi essere formattate con il file system desiderato
(per sistemi PC, FAT16, FAT32 o NTFS; FAT16, seppure leggermente più efficiente nello sfruttamento del
disco in caso di file piccoli, è ormai completamente caduto in disuso per le sue eccessive restrizioni
(non può gestire dischi né file più grandi di 2 GB); anche FAT32 è usato ormai raramente per le restrizioni
dovute a criteri di progetto (la massima dimensione
di un file è di 4 GB: questo può essere un problema
in applicazioni di video recording) oppure alle sue
imperfette implementazioni nei vari sistemi operativi Windows della serie 95/98/ME (Scandisk e Format
soffrivano di limitazioni che impedivano di usare pienamente le potenzialità di FAT32). Nessun problema
invece (almeno per il momento) con NTFS, la cui attuale implementazione può gestire dischi da 256 TB e
file lunghi fino a 16 TB.
Dal canto suo Linux, oltre a essere compatibile con
i file system di Windows, dispone anche dei “propri”
file system nativi fra cui scegliere: ext2, ext3, reiserfs, e
così via. Alcuni di questi file system sono di tipo “journaling” ossia mantengono un registro sequenziale delle operazioni di scrittura eseguite, utile per eventuali
azioni di ripristino in caso di inaspettata interruzione
dell’alimentazione.
I dischi ottici, strutture e differenze
I numerosi tipi di formato fisico e logico esistenti
nel campo delle memorie ottiche sono la conseguenza di un processo evolutivo tendente ad aumentare la
capacità di registrazione e ad aprire nuove possibilità,
come la scrivibilità e riscrivibilità dei supporti.
Il primo dei formati interessanti per un utilizzo informatico, il CD-ROM, è una particolare modalità di
organizzazione dei dati sulla superficie di un supporto uguale a quello impiegato nei normali CD Audio.
La famiglia di standard relativi ai Compact Disc è stata tradizionalmente pubblicata sotto forma di volumi
identificati da un colore. Il primo formato, il CD Audio,
è specificato nel cosiddetto Red Book. I dischi hanno
un diametro di 12 cm; la distanza inter-traccia (detta
anche pitch) è di 1,6 micron e il laser usato per la lettura ha una lunghezza d’onda di 780 nanometri (un
nanometro è un milionesimo di millimetro). I bit sono
registrati sotto forma di microscopiche “buche” (pit)
la cui lunghezza lungo la traccia varia, a seconda del
valore del bit, da poco meno di un micron a qualche
micron (un micron è un millesimo di millimetro). I CD
ROM furono progettati per contenere 74 minuti di musica campionata a 16 bit/44.1 KHz in stereo, con una
capacità di 650 MB.
La lettura avviene a velocità lineare costante e non
a velocità angolare costante, il che significa che il motore di un lettore di CD Audio deve rallentare o accelerare a seconda che venga letta la regione centrale o
periferica del disco. Successivamente fecero la loro
comparsa CD registrabili con capacità superiori: per
esempio i modelli da 80 minuti con una capacità equivalente a 700 MB.
Il CD-ROM è specificato nello Yellow Book, che descrive le modalità d’impiego e di organizzazione logica delle informazioni sul disco per l’impiego in ambito
Lezione 6
dati. Le caratteristiche fisiche e ottiche del supporto
tuttavia rimangono analoghe a quelle del CD Audio.
La specifica originale del file system per i CD ROM è
contenuta nello standard ISO 9660. Successive evoluzioni di questo standard hanno introdotto il supporto
per nomi di file lunghi (Joliet), per la registrazione di
informazioni su permessi d’accesso, proprietà del file,
link simbolici e una maggiore profondità per le gerarchie di directory (Rock Ridge) e il supporto per consentire di avviare il PC da CD-ROM anziché da hard
disk (El Torito).
Una significativa innovazione consistette nell’introduzione, nel 1988, del formato CD-R (CD Recordable)
che permette di scrivere su un CD (ma non di riscriverlo con altri dati, se non marcando come cancellati
i dati già scritti e consumando altra capacità). Alcuni
anni dopo fu la volta del CD-RW, che consente anche
di cancellare e riscrivere il disco in tutto o in parte;
con l’introduzione del file system UDF (e dei relativi
driver capaci di supportare la scrittura “a pacchetti”
anziché tutto un disco per volta o una traccia per volta) diventò possibile vedere un CD-RW alla stregua di
un hard disk da 650 MB con supporto rimovibile. Una
seria limitazione riguardava però il numero massimo di cancellazioni e riscritture supportate: soltanto
1.000. Gli standard CD-R e CD-RW sono specificati nel
cosiddetto Orange Book.
I supporti vuoti per CD-R e CD-RW sono prodotti preincidendo una traccia di riferimento a spirale.
Viene poi applicata una pellicola di speciale sostanza fotosensibile su cui il laser di scrittura può “bruciare”, in modo irreversibile, piccole regioni, creando
dei pit riconoscibili (nel CD-R), oppure a cui il laser di
scrittura può far cambiare stato (in modo reversibile)
creando regioni il cui indice di riflessione della luce è
leggermente diverso da quello standard.
IT administrator - Hardware
25
commerciale dei “laser disc” (grossi dischi ottici da 30 cm registrati in
analogico) suggerì di contenere le
dimensioni del disco e di utilizzare
una tecnologia digitale: il risultato fu
il DVD (Digital Versatile Disc). Molto opportunamente
si decise di mantenere le medesime dimensioni fisiche di un CD: questo avrebbe poi permesso di realizzare drive universali, in grado di trattare indifferentemente CD e DVD.
Il primo tipo di DVD
26
27
introdotto aveva una
capacità di 4.7 GB. A differenza di un CD, però,
per incrementare la capacità fino a circa 9 GB
un DVD può contenere anche due strati (si parla in
questo caso di DVD Dual Layer, DVD-DL o DVD-9). La
lettura del secondo strato può avvenire cambiando la
focalizzazione del laser, un processo che può richiedere un breve tempo di ricalibrazione; durante la riproduzione di contenuti video si può quindi assistere a una breve pausa, del tutto fisiologica, quando si
verifica questo passaggio.
Esistono anche DVD a doppia faccia, assai meno
diffusi (anche in questo caso nelle varianti a singolo
e doppio strato, con capacità rispettivamente di circa 10 e circa 18 GB).
Per registrare una maggior quantità di informazioni sul disco, il DVD impiega tracce più ravvicinate
(0.74 micron) e pit di dimensione più che dimezzata
rispetto a quanto avviene su un CD. La velocità fisica
di rotazione del disco nei normali lettori DVD video
è inoltre tripla rispetto a quella dei CD. Il risultato è
che la velocità 1x di un DVD genera un flusso dati 8-9
volte più intenso (oltre 1 Mbyte/s) di quello generato
da un CD-Audio 1x.
L’aumento della velocità di lettura e scrittura
Sia per i CD-R sia per i CD-RW un aspetto molto importante che ha per anni stimolato un vivace progresso tecnologico è stato quello della massima velocità
alla quale i supporti potevano essere scritti. La difficoltà riguarda il fatto che più velocemente avviene la
scrittura più è breve il tempo a disposizione del laser
per creare i pit lasciando una traccia chiara e ben riconoscibile in fase di lettura. Nelle tecnologie CD il bit
rate tradizionalmente si misura come multiplo del bit
rate standard in modalità audio (circa 150 Kbyte/secondo). Una velocità 2x equivale quindi a 300 Kbyte/
s, 4x a 600 Kbyte/s e così via. Per i CD-R si è arrivati a
velocità di scrittura 52x: un disco può quindi essere
scritto a una velocità 52 volte superiore a quella alla
quale verrebbe letto (se si trattasse un CD Audio) da
un lettore musicale. Per i CD-RW, il cui processo fisico
di scrittura è più delicato, si è arrivati a una velocità
di “appena” 32x.
La dinastia dei formati CD non finisce qui – sono
comparsi anche VideoCD, PhotoCD, Super Audio CD
e altri formati ancora – ma i più diffusi e noti, e i più
“universali” dal punto di vista applicativo, rimangono quelli citati.
Il secondo passo evolutivo si ebbe quando si decise
di progettare uno standard per dischi ottici capaci di
contenere contenuti video anziché “semplicemente”
musica. Anche stavolta, insomma, la spinta verso il
nuovo standard non veniva dal mondo della microinformatica, ma da quello dell’elettronica di consumo.
Si desiderava sostituire l’obsoleta e scomoda videocassetta con un più moderno e pratico supporto digitale con la possibilità di accesso rapido ai contenuti;
la scelta di passare dal nastro al disco fu quindi obbligata. La lezione appresa dopo lo scarso successo
I due consorzi per la guerra dei formati DVD
Una situazione un poco caotica venne a determinarsi quando arrivò il momento di progettare l’attesissima versione scrivibile (e riscrivibile) dei DVD.
Furono proposti due diversi standard da due diverse
associazioni di aziende. Da un lato il DVD Forum, su
impulso di Pioneer, propose il formato DVD-R e successivamente il riscrivibile DVD-RW (figura 26), oltre a
un formato DVD-RAM, scarsamente diffuso almeno in
Europa, a cui abbiamo già accennato per le sue particolarità che fanno assomigliare la sua organizzazione
dei dati più a quella di un hard disk che a quella di un
CD o DVD. Dall’altro lato Philips e Sony, costituita la
DVD Alliance, proposero i formati DVD+R e DVD+RW
(figura 27).
I formati DVD-R e DVD-RW proposti dal DVD Forum
sono generalmente considerati maggiormente compatibili con i lettori DVD di elettronica di consumo
meno recenti. Nella specifica degli standard DVD+R e
DVD+RW si pose invece maggior enfasi sulle prestazioni e sull’eliminazione della necessità di “finalizzare” il disco al termine del processo di masterizzazione. Oggi tutti i masterizzatori sono in grado di supportare entrambe le famiglie di formati quindi il dilemma
è assai meno importante che in passato, quando il
rischio di investire sulla tecnologia “declinante” faceva evidentemente esitare gli acquirenti di masterizzatori e lettori.
Successivamente vennero introdotti sul mercato
i dischi registrabili e riscrivibili a doppio strato e ancora una volta si ripropose la contrapposizione fra gli
standard del DVD Forum e quelli della DVD Alliance:
DVD+R/+RW DL, DVD-R/-RW DL. La capacità dei supporti ottici scrivibili rimovibili arrivava così al suo
PC Open 107 Settembre 2007
25 - Il DVD è il formato
“successore” del CD.
Densità e quindi capacità
di registrazione sono
aumentate di circa
8 volte. Sono state
previste fin dall’inizio le
modallità R e RW, anche
se di fatto proposte, con
lievi differenze, da due
consorzi contrapposti
26 - Il logo DVD-RW del
formato proposto dal DVD
Forum, di cui fa parte ad
esempio Pioneer
27 - Il logo del formato
“rivale” DVD+RW
promosso dalla DVD
Alliance, in cui rientrano
fra gli altri Philips e Sony
IT administrator - Hardware
29 - Le cassette a nastro
SLR possono arrivare
fino a 200 GB di capacità
e a un throughput di 32
Mbyte/s
28 - I logo del formato
Blu-ray e quello dell’HDDVD a confronto. Questi
due formati sono in lotta
per la conquista del
mercato dei media per
l’alta definizione video.
Il sistema Blue-Ray
ha tecnicamente una
capacità superiore ma
risulta complessivamente
più costoso dal punto
di vista produttivo. La
PlayStation 3 è di fatto
il primo dispositivo
con lettore Blue Ray
incorporato a essere
proposto a un costo
abbordabile
30 - Il formato DLT può
immagazzinare fino a
800 GB per cassetta e
offre un throughput di 60
Mbyte/s.
31 - Con il formato LTO
(Ultrium) si possono
raggiungere capacità di
800 GB per cassetta e
transfer rate di ben 120
MB/s.
1.9.2.2 Conoscere i
jukebox.
1.9.2 Altri dispositivi
magnetici.
1.9.2.1 SLR, DAT, DLT,
ecc.
32 - Un jukebox Blu-ray
da 400 dischi single layer,
con un massimo di 6
drive e una capacità non
compressa di circa 10 TB.
33 - Un jukebox HP
StorageWorks EML
E-Series può essere
equipaggiato con un
massimo di 16 drive
e 505 cassette e
raggiungere una capacità
di ben 202 TB.
nuovo massimo di circa 8.5 GB per disco. Naturalmente, dopo un certo tempo, anche in questo caso
comparvero masterizzatori dual layer dual format in
grado di togliere significato alla disputa fra DVD-Forum e DVD-Alliance.
Nel campo delle memorie ot28
tiche si è registrata negli ultimi
anni, una certa “effervescenza”
legata al tentativo (sostanzialmente fallito) di rendere queste
memorie nuovamente idonee, in
campo informatico, a supportare attività di backup
per hard disk la cui capacità è in perenne e vertiginosa crescita, nonché al tentativo (probabilmente riuscito) di proporre, nell’elettronica di consumo, un nuovo
standard per la distribuzione di contenuti video ad
alta definizione.
I due nuovi formati sono l’HD-DVD e il Blu-ray (figura 28), che possono ospitare rispettivamente fino a 30
GB e fino a 50 GB su singolo disco. Entrambi utilizzano un laser blu-violetto a 405 nm (contro i 650 nm del
laser a luce rossa usato nei DVD); le differenze di capacità dipendono da piccole differenze nell’apertura
delle lenti e nella disposizione geometrica delle tracce
e dei pit. Il formato HD-DVD enfatizza la compatibilità con il DVD a livello di produzione e d’uso, è previsto, per esempio, un tipo di disco combo con un lato
HD-DVD e l’altro lato in formato DVD che consente a
distributori e rivenditori di risparmiare riducendo le
scorte di magazzino: lo stesso disco sarà utilizzabile
(con risultati ottimali) sia da clienti dotati di lettore
ad alta definizione sia da clienti in possesso di normali lettori DVD.
La produzione degli HD-DVD può avvenire, con un
modesto investimento per “upgrade”, sulle stesse linee usate per i normali DVD. Il Blu-ray punta maggiormente sulle prestazioni, con una capacità molto
maggiore (50 GB anziché 30 GB), che permette di memorizzare fino a un massimo di 9 ore di video ad alta
definizione, e un bit rate che può raggiungere i 54 Megabit/secondo. La contrapposizione fra i due formati
si ripercuote anche sul mercato delle console per videogiochi, in cui la PlayStation 3 ha adottato un Bluray integrato, diventando anzi il primo lettore a costo abbordabile per questo formato video, mentre la
Xbox360 ha offerto un lettore esterno HD-DVD.
Sono comunque in arrivo lettori ibridi capaci di
leggere sia Blu-ray sia HD-DVD ed è lecito aspettarsi
che facciano successivamente la loro comparsa anche masterizzatori dual standard.
I dispositivi magnetici ideali per il backup
Quando si parla di memorie di massa magnetiche il
pensiero va istintivamente agli hard disk; tuttavia per
le applicazioni di backup, in cui un accesso sequenziale in scrittura è accettabile mentre contano molto
la velocità di scrittura, l’affidabilità, la durata e il basso costo, è ancora molto diffuso l’impiego di drive a
nastro magnetico.
Questi dispositivi funzionano con cassette di nastro che possono contenere, a seconda dei formati,
anche decine o centinaia di GB. Fatto molto importante, la velocità di scrittura può raggiungere e in qualche caso superare la velocità degli hard disk, rendendo veloce il backup. Il restore delle informazioni invece è meno rapido perché richiede di localizzare sul
nastro il punto d’inizio del file desiderato e questo richiede un riavvolgimento più o meno lungo della bobina contenuta nella cassetta.
Fra i formati di cassette a nastro ricordiamo
• il formato SLR (Scalable Linear Recording) (Figura
29), con capacità fino a 200 GB e transfer rate fino
PC Open 108 Settembre 2007
Lezione 6
29
30
31
a 32 MB/s;
• il formato LTO (Linear Tape-Open)
(Figura 31), con capacità fino a 800 GB
e transfer rate di
120 MB/s;
• il formato DLT (Digital Linear Tape) (Figura 30), che arriva a 800 GB
per cassetta con transfer rate di 60 MB/s;
• il formato DAT (Digital Audio Tape), originariamente nato per applicazioni audio digitali, con capacità variabili in funzione della lunghezza del nastro;
può arrivare a 800 GB di capacità e 120 MB/s di
transfer rate.
Tutti i sistemi di backup a nastro adottano compressione dati per aumentare la capacità effettiva; il
valore di capacità dichiarato solitamente assumendo
convenzionalmente che la compressione riesca a raggiungere un fattore 50%.
L’effettivo fattore di compressione raggiungibile,
in realtà, dipende dalla natura dei dati trattati. Per
un corretto confronto è necessario quindi esaminare i dati di capacità “nativa” (al netto della compressione) che il produttore generalmente dichiara nella
scheda tecnica.
I jukebox per esigenze aziendali
Anche se le capacità dei sistemi a nastro possono
sembrare soddisfacenti per effettuare il backup di un
singolo PC, non lo sono affatto se lo scopo è quello
di assicurare il backup di tutte le macchine della rete aziendale. In questo caso è necessario procurarsi
sistemi in grado di trattare decine di terabyte di capacità.
La soluzione è rappresentata dai cosiddetti Jukebox, macchine nelle quali un sistema robotizzato gestisce automaticamente un archivio di decine o centinaia di dischi ottici (o di cassette di nastro magnetico), inserendoli ed estraendoli automaticamente dal
drive, offrendo una capacità aggregata pari alla somma di quella dei singoli supporti utilizzati. Così, per
esempio, un jukebox basato su tecnologia Blue-Ray da
50 GB per disco che contenga circa
32
700 dischi potrà arri33
vare a circa 30 TB di
spazio di backup (Figura 32). Un jukebox
basato su circa 500
nastri LTO (Figura
33) potrà raggiungere 200 TB.
IT administrator - Hardware
Materiale didattico
progettato per EUCIP
IT Administrator
segnalato da AICA
Modulo 1 - Hardware
“AICA, Licenziataria
esclusiva in Italia
del programma
EUCIP (European
Certification
of Informatics
Professionals)
riconosce che il
materiale didattico
segnalato è
strutturato in
modo coerente con
l’organizzazione dei
contenuti prevista
dai documenti
EUCIP di riferimento.
Di conseguenza
AICA autorizza sul
presente materiale
didattico l’uso
dei marchi EUCIP
(registrato dal CEPIS
Concil of European
Professional
Informatics
Societies) ed AICA
protetti dalle leggi
vigenti.”
1.10 Dispositivi
di visualizzazione
Fig. 1 - Le librerie
DirectX, di cui sono
spesso disponibili gli
aggiornamenti sul sito
Microsoft, comprendono
le liberie grafiche
utilizzate per generare le
immagini a video
Fig. 2 - L’effetto moiré
è uno dei più comuni
problemi di aberrazione
visiva che può capitare
con un monitor
(specialmente CRT).
Si tratta di una figura
d’interferenza che a
seconda dei casi può
provocare l’alterazione di
luminanza e crominanza,
spesso con bizzarre
forme geometriche.
Si verifica soprattutto
quando la risoluzione del
monitor, o del sensore
video usato per una
ripresa, è inferiore
al valore richiesto
dall’immagine o dai
particolari presenti nella
scena e viene enfatizzato
da disallineamenti
fra i motivi prevalenti
nell’immagine e le
strutture geometriche dei
pixel dello schermo
Lezione 7
A scuola con PC Open
I monitor e le schede
grafiche
Dai monitor agli adattatori grafici, come funzionano
PDF DEL CORSO
NEL DVD
i componenti e le periferiche che permettono di vedere
ciò che viene prodotto sul computer.
Avanzamenti tecnologici e miglioramenti nelle caratteristiche
tecniche dalle origini ai giorni nostri di Marco Mussini
intuitivo riconoscere che anche il più potente e
perfezionato computer non avrebbe praticamente alcuna utilità se, oltre a ricevere informazioni
dall’esterno, elaborarle alla massima velocità senza
errori ed immagazzinare dati nella memoria di massa,
non possedesse anche la capacità di fornire in uscita (output) delle risposte o delle segnalazioni che dipendano, secondo le regole fissate da un qualche algoritmo, dal proprio stato interno, dagli input ricevuti
o da entrambi.
I canali di output possono essere di vari tipi, a seconda dello standard di connettori e segnali e della
natura dei dati scambiati: per esempio la rete (a cavo o wireless), le periferiche (fra cui, in particolare,
le stampanti) collegate a porte USB, Firewire o Bluetooth, il sottosistema audio con i relativi altoparlanti, e così via.
Per sistemi che prevedano interazione con un operatore umano, tuttavia, è immediata l’associazione
fra il concetto di output e quello di visualizzazione.
La forma di interazione uomo-macchina più pratica
e al tempo stesso più potente, per la ricchezza di informazioni comunicabili e facilmente individuabili, è
quella visiva (seppur generalmente corroborata dalla comunicazione sonora o vocale). Di questo canale
di comunicazione si occupa una catena di appositi
dispositivi hardware o software i quali collettivamente assolvono alla funzione di convertire dati, numeri
e testi in immagini riconoscibili dall’operatore e presentati fisicamente su uno schermo.
È
I principali elementi di questa ca- 1
tena logica sono, percorrendola dal
sistema operativo verso l’operatore:
• le librerie grafiche (figura 1)
• l’adattatore grafico (detto anche
“scheda grafica”)
• il monitor.
Nel loro complesso, sistema operativo, software
applicativo, librerie, adattatore e monitor producono
immagini che dovrebbero avere caratteristiche ottimali da diversi punti di vista, fra cui ricordiamo
• quello ottico: per non affaticare la vista occorrono nitidezza, assenza di sfarfallio, contrasto e luminosità né eccessivi né insufficienti, immagini di dimensione appropriata e una resa cromatica fedele
e naturale con assenza di aberrazioni cromatiche
(figura 2);
2
Calendario delle lezioni
Lez. 1: la scheda madre e il BIOS
Lez. 2: i processori
Lez. 3: la RAM
Lez. 4: bus e risorse di sistema
Lez. 5: interfacce
Lez. 6: memorie di massa
Lez. 7: i monitor le le schede grafiche
Lez. 8: le stampanti
Lez. 9: hardware di rete
Lez. 10: alimentatori e installazione nuovo
hardware
Lez. 11: risoluzione dei problemi
PC Open 110 Ottobre 2007
• quello logico: la presentazione visiva delle informazioni deve essere organizzata secondo uno schema razionale e immediatamente comprensibile. Per
esempio, una successione logica viene solitamente
disposta secondo l’ordine abituale di lettura: per
le lingue occidentali, da sinistra a destra e dall’alto in basso;
• e perfino quello psico-ottico: i colori, i simboli, le differenze di grandezza sono tutti espedienti utilizzati
per attrarre l’attenzione istintiva verso le informazioni più importanti.
Se degli ultimi due aspetti si occupano principalmente sistema operativo, software applicativo e librerie grafiche, dell’ottimizzazione ottica si occupa-
Lezione 7
IT administrator - Hardware
no soprattutto la scheda grafica e il monitor. Iniziamo
l’approfondimento proprio da quest’ultimo.
Monitor
3
La funzione svolta
da un monitor è evidentemente quella
di trasformare in immagini i segnali elettrici ricevuti via cavo
e di presentare queste immagini su uno
schermo. Nonostante tutti i monitor, in
ultima analisi, assolvano allo stesso compito, esistono macroscopiche
differenze dovute alle diverse tecnologie costruttive,
alla modalità di connessione, alla “definizione” dell’immagine, all’aspetto cromatico, al rapporto di contrasto, al “tempo di risposta” (per la sola tecnologia
LCD) e così via.
Le più comuni tipologie costruttive
Le tecnologie costruttive dei monitor sono polarizzate su due approcci fondamentalmente diversi:
• il sistema basato su tubo a raggi catodici (Cathode
Rays Tube, CRT);
• il sistema basato su retroilluminazione e pannello a
cristalli liquidi (Liquid Crystal Display, LCD).
La tecnologia CRT rappresenta l’estrema evoluzione di un concetto noto e sfruttato da decenni negli
schermi radar, negli oscilloscopi e nei televisori prima
in bianco/nero e poi a colori. Si basa sulla proprietà di
un catodo (specie se riscaldato) di fungere da emettitore di un fascio di cariche elettriche negative (elettroni) le quali, per le leggi dell’elettromagnetismo, sono sensibili ai campi elettrostatici e magnetici. Questi
campi possono essere quindi usati per muoverle, accelerarle e indirizzarle verso una determinata regione
di uno schermo di vetro contro il quale collideranno.
L’urto del fascio di elettroni (raggio catodico) con le
sostanze (comunemente denominate fosfori) utilizzate per il trattamento superficiale della faccia interna
dello schermo le rende luminescenti. La luminescenza perdura solo per un breve tempo; per sostenerla
in modo permanente è necessario ripetere a intervalli
regolari l’urto fra il raggio catodico e la regione interessata. Nei vecchi schermi radar e in certi oscilloscopi si usavano fosfori in grado di sostenere la luminescenza anche per diversi secondi dopo l’eccitazione.
Questo in un televisore o in un monitor PC non sarebbe appropriato, perché per creare l’illusione dell’animazione è necessario che l’immagine si modifichi almeno 18-24 volte al secondo. In questo caso i fosfori
usati sono scelti in modo da mantenere l’immagine solo per il tempo necessario (fra 1/18 e 1/24 di secondo
circa) e decadere poi rapidamente verso il nero.
Per generare più volte al secondo l’immagine, il raggio catodico (a volte definito anche pennello elettronico in questa sua applicazione al campo video) viene
pilotato in modo tale da visitare tutti i punti di cui si
compone lo schermo. Lo schermo viene percorso per
righe, per esempio da sinistra a destra e dall’alto in
basso; si dice Frequenza Orizzontale quella che caratterizza la visita di una singola riga di punti e Frequenza
Verticale, o Frequenza di refresh, il numero di rigenerazioni complete dell’immagine per ogni secondo.
Nel preciso istante in cui il raggio sta colpendo un
determinato punto, l’elettronica di controllo, sotto
l’effetto del segnale video, modula l’intensità del raggio stesso in modo tale da far apparire un punto più
o meno luminoso. In questo modo è possibile comporre un’intera immagine monocromatica in base alla descrizione costituita dal segnale video (elettrico)
ricevuto in ingresso, la cui intensità, istante per istante, rappresenta la luminosità del punto che in quell’istante viene interessato dal pennello elettronico;
per questa ragione tale segnale è anche detto luminanza. Questo è il principio di funzionamento di uno
schermo CRT di tipo monocromatico.
In uno schermo CRT a colori, per formare l’immagine, non basta illuminare ciascun punto con l’intensità giusta: è necessario anche fare in modo che quel
punto assuma una ben precisa colorazione. Per questo il sistema deve essere perfezionato nel seguente
modo:
• il segnale video deve trasportare, per ogni punto,
sia l’informazione di luminanza sia quella relativa
al colore (crominanza); nel più economico tipo di
tecnologia analogica, i due segnali sono miscelati in
modo tale da poter viaggiare insieme su un singolo
cavo (si parla in tal caso di segnale videocomposito) ma al tempo stesso essere facilmente separabili
da chi li riceve. In sistemi analogici più perfezionati,
per ottenere una migliore qualità video, i segnali di
luminanza e crominanza viaggiano separati (S-Video), mentre in sistemi analogici ancor più sofisticati si può suddividere il segnale in tre componenti
(rosso, verde, blu: Red-Green-Blue, o RGB) portate
da conduttori indipendenti, o addirittura adottare
il sistema Component Video, in cui il segnale video
è suddiviso in luminanza + due componenti di informazione cromatica (YUV). Una qualità video ancora maggiore è possibile con le connessioni digitali, DVI o HDMI, in cui la descrizione dell’immagine
viaggia concettualmente sotto forma di numeri e
non direttamente come segnale elettrico analogico
modulato in ampiezza.
• Ogni punto dello schermo deve potersi colorare di
qualsiasi tonalità visibile e non semplicemente illuminarsi di un unico, determinato colore, a intensità
modulabile. Essendo difficile o impossibile fabbricare un unico tipo di fosforo di cui si possano determinare sia la luminosità sia la tonalità agendo sul
tipo di fascio elettronico incidente, si fa ricorso alla
soluzione di decomporre la luce del punto, secondo il modello additivo, in tre componenti monocromatiche (rossa, verde e blu) emesse da tre elementi
luminosi colorati. In questo modo lo schermo non
è più costituito da una parete di vetro trattata uniformemente con fosfori, ma da un insieme rigidamente organizzato di gruppi di tre punti colorati.
Un gruppo di tre punti è detto pixel e i singoli componenti sono detti subpixel.
• Un singolo pennello elettronico (per la luminanza) non basta più; servono tre pennelli elettronici,
ognuno dei quali dedicato a pilotare esclusivamente i subpixel di uno dei tre colori primari.
Gli schermi CRT a colori differiscono per l’organizzazione geometrica dei subpixel (per esempio: tre
cerchi disposti a triangolo o tre rettangoli disposti affiancati). Conseguentemente differiscono anche per
la tecnica usata per guidare i pennelli elettronici in
modo da farli collimare con i pixel di loro “competenza”: questo è normalmente fatto con una lamina
metallica microforata (aperture mask), con i fori organizzati a “mosaico” e corrispondenti alle posizioni
dei subpixel, oppure con un “pettine” di finissimi filamenti paralleli (aperture grille). Quest’ultimo sistema
è adottato nei tubi Trinitron, nei quali è sempre previsto almeno un sottilissimo filo trasversale incaricato
PC Open 111 Ottobre 2007
1.10.1 Monitor
Fig. 3 - Applicazioni di
produttività d’ufficio,
software multimediali
e soprattutto giochi
beneficiano notevolmente
degli schermi di grandi
dimensioni. Il taglio da
24” permette anche di
avere al tempo stesso
una risoluzione Full HD ed
una visione panoramica.
(nella foto un BenQ
FP241W)
1.10.1.1 Essere al
corrente delle più
comuni tipologie
costruttive, quali:
monitor a tubo
catodico (CRT),
schermi a cristalli
liquidi (TFT), e dei
relativi principi di
funzionamento
IT administrator - Hardware
di mantenere equidistanti e perfettamente paralleli
i filamenti verticali che altrimenti potrebbero deformarsi; il filo è riconoscibile sullo schermo, quando
questo visualizza uno sfondo bianco, come una sottile linea orizzontale leggermente più scura. L’immagine visualizzata sui monitor Trinitron è inoltre sensibile agli scossoni orizzontali, che fanno brevemente
vibrare i filamenti verticali provocando curiose oscillazioni di luminanza.
Fig. 4 - Il principale
problema dei monitor CRT
è la notevole profondità,
proporzionale fra l’altro
alla diagonale dello
schermo
4
Fig. 5 - Il Phosphor
burn-out è l’effetto
che si produce negli
schermi CRT quando
per lungo tempo sullo
schermo compare
sempre la stessa
immagine. In seguito,
infatti, resta una sorta di
“ombra” dell’immagine
passata, sovrimpressa
a qualunque nuova
immagine venga
visualizzata. A
seconda della gravità
e della durata della
sollecitazione, l’effetto
può essere anche
permanente. I programmi
salva schermo, la
cui immagine non è
mai fissa, servono
esattamente a prevenire
questo effetto
Fig. 6 - I più vecchi
schermi CRT erano
caratterizzati da una
curvatura sferica, fonte
di fastidiosi riflessi
e di deformazioni
dell’immagine, e da uno
schermo a sfondo chiaro,
scarsamente
contrastato
Fig. 7 - I primi
schermi Trinitron
si distinguevano
dai CRT tradizionali
per la curvatura
cilindrica anziché
sferica, che
riduceva riflessi
e aberrazioni
geometriche
Fig. 8 - Anche
con la tecnologia
CRT, dopo anni di
evoluzione, sono
stati realizzati degli
schermi piatti
Fig. 9 - Gli schermi LCD
stanno sostituendo i
monitor CRT in quasi tutte
le applicazioni
5
I principali problemi
dei monitor CRT sono costituiti dal peso (a causa della notevole quantità di vetro necessaria per costruire
il robusto tubo catodico) e dall’ingombro in profondità (generalmente proporzionale alla dimensione in
pollici dello schermo – figura 4), che comportano un
aumento dei costi di fabbricazione, trasporto e stoccaggio che in ultima analisi fanno salire il prezzo di
vendita, ma anche dal consumo elettrico e dal progressivo degrado di qualità dovuto a tre cause: la perdita di focalizzazione; la perdita di potere elettroluminescente dei fosfori (phosphor burn-out – figura 5)
soprattutto nelle aree di schermo in cui compare per
lunghi periodi
sempre
la 7
6
8
Lezione 7
stessa immagine; il decadimento dell’elettronica analogica di precisione deputata a gestire il pennello elettronico, con il risultato di sfarfallamenti, tremolii e deformazioni dell’immagine. Vi sono anche difficoltà costruttive per produrre schermi perfettamente piatti;
considerando la natura puntiforme della sorgente del
pennello elettronico, per avere un angolo di incidenza costante fra raggio catodico e fosfori idealmente lo
schermo dovrebbe essere una calotta sferica. Effettivamente i primi televisori avevano schermi fortemente bombati (figura 6), ma questo aveva lo svantaggio di generare fastidiosi riflessi (inaccettabili su uno
schermo utilizzato per ore per lavorare), oltre a non
essere esteticamente desiderabile. Col tempo, e con
l’evoluzione dell’elettronica di controllo che ha permesso di compensare gli effetti della geometria non
ideale, gli schermi CRT hanno potuto diventare dapprima calotte cilindriche anziché sferiche (Trinitron
– figura 7), meno inclini alla generazione di riflessi, poi
calotte sferiche a curvatura fortemente ridotta, infine
perfettamente piatti (figura 8). I produttori hanno lavorato anche sulla profondità dei monitor, accorciando notevolmente il cannone elettronico nei cosiddetti
prodotti “short neck”; ciò comunque ha esasperato i
problemi geometrici, al punto che angolo di incidenza
del raggio catodico e distanza dal cannone elettronico
dallo schermo subiscono in questi modelli notevolissime variazioni fra il centro e la periferia dell’immagine, costringendo a sofisticazioni ancora maggiori nell’elettronica di controllo per compensarle.
Nei monitor a cristalli liquidi (Liquid Crystal Display,
LCD) (figura 9) il principio di funzionamento è totalmente diverso. Anziché modulare all’origine subpixel
per subpixel l’emissione di una sorgente luminosa, si
fa ricorso a una sorgente luminosa costante di colore
bianco (il sistema di retroilluminazione, permanentemente acceso) e si modula l’azione di una schiera di
microfiltri organizzati a gruppi di tre (un gruppo per
ogni pixel) che ne blocca in tutto o in parte ognuna
delle tre componenti cromatiche primarie per ottenere il colore e l’intensità voluti (figura 10). Quando
in un punto il gruppo di tre filtri è completamente
aperto, localmente viene lasciata passare tutta la luce
della retroilluminazione e di conseguenza quel punto
appare bianco intenso; se i tre filtri sono totalmente
chiusi, il punto appare nero (non perché all’origine
non sia stata emessa luce per quel punto, ma perché
la luce emessa è stata bloccata); se il tris di filtri è regolato in modo tale da lasciar passare una certa aliquota della componente rossa, verde e blu si otterrà
un colore corrispondente alla miscelazione dei colori
primari. Spetta all’elettronica di controllo comandare,
per ogni pixel dello schermo, i tre filtri corrispondenti, in modo tale da rispecchiare fedelmente quanto
richiesto dai segnali di luminanza e crominanza ricevuti per quel pixel.
Per quanto riguarda la fonte luminosa, di solito si
tratta di un sistema di lampade fluorescenti ultrapiatte e prismi diffusori disposti in modo tale da generare
una luce uniforme su tutta la superficie dello schermo, ma ultimamente su schermi di fascia alta si sta
diffondendo l’uso di una matrice di micro LED ad alta efficienza.
Come decidere se scegliere un CRT o un LCD?
Decenni di affinamento tecnologico hanno indiscutibilmente portato a CRT eccellenti specialmente
sotto il profilo del contrasto, della risposta cromatica, della brillantezza dell’immagine e della velocità
di risposta, tanto che in molte applicazioni di video
e grafica professionale sono ancora oggi preferiti agli
schermi LCD. Tuttavia per il mercato di massa (in par-
9
PC Open 112 Ottobre 2007
Lezione 7
10
ticolare per quello domestico o delle piccole attività
professionali: Small Office-Home Office – SOHO) contano molto i difetti strutturali, ineliminabili, del CRT:
un monitor CRT per computer, soprattutto di grandi
dimensioni come un modello da 21”, può pesare anche 40 Kg, avere una profondità di 50 cm e consumare
250W di corrente. Per contro, uno schermo LCD delle
stesse caratteristiche e risoluzione può pesare 10 kg,
essere profondo 10 cm e consumare 100W di corrente. Anni fa il costo ancora elevato degli LCD ad alte dimensioni tratteneva molti potenziali acquirenti, ma
oggi anche questo problema è di fatto superato: il differenziale di prezzo si è pressochè annullato in quasi
tutte le fasce di dimensioni e risoluzione e la qualità
video è in continuo miglioramento.
Alla base di questa tendenza vi è senza dubbio il
fatto che la tecnologia di produzione dei pannelli LCD
presenta molte affinità con quella dei microchip: uno
schermo LCD fabbricato nella diffusissima tecnologia
TFT (Thin Film Transistor, transistor su pellicola) comprende almeno un transistor per ciascun subpixel.
Questo significa che un comune schermo da 19”,
1.280x1.024 pixel, comprende 1.280x1.024x3=quasi
4 milioni di transistor. Concettualmente è come un
grosso chip, con la differenza però che i transistor
sono costruiti su una scala dimensionale molto maggiore: la superficie di un pannello LCD per PC è di
diversi decimetri quadrati, mentre un microchip ha
una superficie di pochi millimetri quadrati. Tuttavia
il processo produttivo è simile e le tecniche per metterlo a punto anche, cosicché le dinamiche di aumento delle rese e di parallela riduzione dei costi sono
abbastanza simili.
Il problema più serio consiste nell’aumento delle
rese produttive, giacché, a rigore, avere anche solo
un transistor difettoso su un milione significa che
ogni pannello LCD avrà probabilmente un paio di
(sub)pixel difettosi visibili e dovrebbe essere svenduto come “fallato” o eliminato. Così facendo, però, il
costo produttivo dei pannelli riusciti male graverebbe
necessariamente sul prezzo di vendita di quelli perfetti e quindi vendibili. L’industria degli LCD ha inventato per questo la scappatoia delle norme ISO 13406-2,
spesso indicate su brochure, volantini e data sheet
di prodotto quasi
fossero, tout court, 11
12
virtù positive (come invece effettivamente sono le certificazioni MPR II o
la TCO 03, che fissano limiti, fra l’altro, alle emissioni
elettromagnetiche
nocive o ai consumi elettrici).
Le norme ISO
13406-2 invece definiscono un certo
IT administrator - Hardware
numero di classi di qualità alle quali corrispondono
determinati numeri massimi di pixel e subpixel difettosi, in rapporto alle dimensioni dello schermo.
Sicuramente il fatto di stabilire una soglia massima
è una garanzia per l’acquirente, ma il rovescio della
medaglia sta nel fatto che la stessa soglia avalla formalmente come “fisiologica” o “normale” la presenza
di un certo numero di difetti, così, in forza di questa
dichiarazione preventiva del produttore, l’acquirente non potrà invocare il diritto alla riparazione in garanzia qualora li riscontrasse. Non a caso, sebbene la
norma ISO preveda anche una classe “zero difetti”, i
prodotti sul mercato sono quasi tutti omologati per
la classe 2, che ammette un certo numero di pixel o
subpixel permanentemente accesi (figura 10) o spenti
(vedi tabella). Questo accorgimento ha consentito di
non dover più scartare una gran quantità di pannelli
imperfetti, ma di immetterli comunque sul mercato,
ottenendo se non altro una riduzione dei prezzi finali.
Va inoltre detto che per essere statisticamente certo
di rientrare nei limiti della classe di certificazione ISO
scelta, il produttore deve puntare a livelli di qualità
che mediamente portino a un numero di difetti ben
inferiore al massimo previsto da tale classe. Così, non
di rado avviene che schermi che formalmente potrebbero avere 5-10 difetti, di fatto non ne abbiano alcuno
(questo è anzi il caso più frequente, soprattutto con
le marche più serie).
Ultimamente comunque alcuni produttori e, in alcuni casi, perfino alcune catene di vendita, hanno proposto garanzie “zero pixel defect”, oppure sono comparsi modelli con certificazione ISO appartenente alla
classe più “virtuosa”, che come già accennato prevede zero difetti.
Singoli subpixel
Pixel
Pixel
Classe costantemente costantemente difettosi (accesi
o spenti)
spenti
accesi
I
0
0
0
II
2
2
5
III
5
15
50
IV
50
150
500
I fattori determinanti ai fini
della qualità d’immagine
Entrando maggiormente nello specifico della valutazione della qualità d’immagine, ricordiamo che i
principali parametri da considerare sono la risoluzione, la frequenza di refresh e la profondità di colore.
La risoluzione di uno schermo dipende dalla quantità di punti (pixel) indipendentemente indirizzabili
che esso comprende; maggiore è il numero di questi
punti, maggiore è la quantità d’informazione (testi, finestre, grafici, icone, celle di foglio elettronico,…) che
possono essere simultaneamente mostrati su quello
schermo.
Tuttavia il concetto di risoluzione non va ridotto a
una mera “conta dei pixel”: il numero di pixel presenti
ha grande importanza, ma va messo in relazione con
le dimensioni dello schermo. A parità di dimensione
dello schermo, tanto maggiore è il numero di pixel più
è alta la risoluzione spaziale di quello schermo, che si
misura in punti per pollice (dot per inch, o DPI). Se le
dimensioni dello schermo crescono, è necessario che
cresca parallelamente anche il numero di pixel che esso gestisce: se infatti questo numero restasse costante, evidentemente crescerebbero le dimensioni dei
pixel, con una diminuzione della risoluzione spaziale. Per questo, sebbene di norma uno schermo da 17”
e uno da 19” abbiano entrambi la stessa risoluzione
PC Open 113 Ottobre 2007
Fig. 10 - Gli schermi piatti
LCD utilizzano una fonte
luminosa posteriore,
costante e uniforme, di
colore bianco, e regolano
la quantità di luce da far
passare per ogni subpixel
dello schermo ad alto
contrasto
Tabella: La norma ISO
13406-2 sul numero
massimo ammissibile
di difetti negli schermi
LCD (valori per milione
di pixel). La stragrande
maggioranza degli LCD
in commercio appartiene
alla classe II. In base
a questa norma, per
esempio, uno schermo da
circa 2 Mpixel come un
1600x1200, in classe II,
è considerato “normale”
se ha fino a 10 subpixel
difettosi, 4 pixel spenti e
4 pixel permanentemente
accesi
1.10.1.2 Essere
consapevoli dei
fattori determinanti
ai fini della qualità
d’immagine,
quali: risoluzione,
frequenza di rinfresco
[refresh rate],
numero di colori
rappresentabili
Fig. 11/12 - Un guasto
tipico dei soli schermi
LCD consiste in
singoli pixel o subpixel
permanentemente accesi
o permanentemente
spenti
IT administrator - Hardware
Fig, 13 - Il dot pitch o
pixel pitch è una misura
della granularità della
matrice di punti. Negli
schermi con griglia di
punti a shadow mask
(in basso) è misurato
come la distanza fra
due subpixel dello
stesso colore. In quelli
di tipo Trinitron, o LCD,
con subpixel affiancati
(aperture grille), è
misurato come la
distanza fra due colonne
vicine di subpixel dello
stesso colore.
Fig. 14 - Una palette di
colori è un espediente
per consumare meno
memoria video potendo
comunque attingere
a un vasto repertorio
di sfumature, di cui si
ritaglia una “antologia”
delle sole tonalità
necessarie per la
specifica immagine da
visualizzare
(1.280x1.024 pixel), osservandoli dalla stessa distanza lo schermo da 17” apparirà più nitido e dettagliato,
perché i suoi pixel sono più piccoli. D’altra parte, un
utilizzatore che non goda di una acuità visiva perfetta
troverà più confortevole lo schermo da 19”, proprio
per i suoi pixel più grandi. Non è quindi possibile dare
una regola di scelta universalmente valida: in generale, dal punto di vista della produttività, è desiderabile
sia disporre di molti pixel, per poter aprire molte finestre o visualizzare due pagine affiancate, sia avere un
pannello di grandi dimensioni, per non sforzare la vista né doversi avvicinare al video. Purtroppo il prezzo
di uno schermo che sia al tempo stesso grande (per
esempio da 24” in su) e ad altissima risoluzione (da
1.920x1.200 in su) si mantiene ancora su livelli eccessivamente alti per farne un prodotto accessibile a un
mercato di massa, onde per cui è necessario scendere a compromessi.
Ricordiamo che
la dimensione dei 13
pixel è misurata
da un parametro
detto dot pitch o
pixel pitch (figura 13): esso nella
maggior parte dei
casi è compreso
fra 0.25 mm e 0.30
mm. Questa distanza, a seconda
del tipo di tecnologia (e in particolare a seconda della
disposizione geometrica dei subpixel) può essere misurata fra i centri di due gruppi di subpixel oppure fra gli assi di due
griglie verticali adiacenti, a seconda della tecnologia
del monitor.
Negli schermi CRT, e in misura molto minore anche
negli schermi LCD, è importante il parametro della
frequenza di refresh, detto anche frequenza verticale.
Come già ricordato, uno schermo CRT deve ridisegnare l’intera immagine un certo numero di volte al
secondo. Esiste innanzitutto un valore minimo (circa
24) al di sotto del quale l’occhio umano percepisce le
animazioni non come movimenti continui, ma “a scatti”, ossia come successioni di fotogrammi discreti.
Tuttavia se uno schermo CRT si limitasse a rinfrescare l’immagine, poniamo, 25 volte al secondo, subentrerebbe un secondo effetto di “sfarfallio” in quanto
i fosfori dello schermo, dopo essere stati visitati dal
pennello elettronico, non sono in grado di mantenere
la luminescenza per un tempo sufficiente ad arrivare
ancora luminosi fino al prossimo refresh: ben prima di
tale successiva visita inizierebbe il decadimento della luminescenza, con il risultato che l’intero schermo
apparirebbe debolmente lampeggiante. Non sarebbe
una soluzione accettabile ricercare fosfori in grado di
mantenere esageratamente a lungo la luminosità, in
quanto, qualora la scena richieda effettivamente una
transizione dal chiaro allo scuro, i fosfori reagirebbero con eccessivo ritardo e si creerebbero effetti scia
non meno fastidiosi.
Il compromesso necessario consiste nello scegliere
fosfori la cui luminescenza decada sensibilmente già
in breve tempo, diciamo entro 1/50 di secondo circa,
ma al tempo stesso fare in modo che il pennello elettronico visiti ogni punto più di 50 volte al secondo.
In questo modo, se necessario è possibile ottenere
animazioni in cui entro il tempo di 1/24 di secondo si
possa virare completamente dal chiaro allo scuro, e
al tempo stesso la luminosità possa essere mantenu-
PC Open 114 Ottobre 2007
Lezione 7
ta, se necessario, semplicemente grazie alla frequente
visita del pennello elettronico.
Inizialmente gli schermi CRT erano caratterizzati
da frequenze di refresh di tipo “televisivo”, ossia 50
Hz con interallacciamento: con questo sistema non
viene ridisegnata 50 volte al secondo l’intera immagine, bensì, alternativamente, la semiimmagine delle
sole righe pari e quella delle sole righe dispari: ogni
semiquadro viene così rinfrescato solo 25 volte al secondo, con problemi di tremolio d’immagine dovuti al
decadimento della luminosità dei fosfori del semiquadro rinfrescato meno di recente. Questa scelta tecnica
semplificava la fabbricazione dell’elettronica di controllo del monitor e della scheda grafica. Col tempo
però la loro qualità è molto migliorata: dapprima è
stato eliminato l’interallacciamento, poi la frequenza
è salita notevolmente, prima su schermi piccoli e poi
anche su quelli grandi. Sono inoltre stati introdotti
degli standard per fissare livelli minimi di qualità che
assicurino una visione non stancante e immagini di
qualità (i cosiddetti standard VESA, dal nome della
Video Electronics Standard Association che li ha proposti). La frequenza di refresh adeguata dipende dalle dimensioni dello schermo: più è grande lo schermo
più, teoricamente, risulterebbe percepibile lo sfarfallio da refresh non abbastanza frequente. In nessun
caso VESA considera accettabili frequenze di refresh
inferiori a 72 Hertz.
Da notare che negli schermi LCD il problema del
decadimento della luminescenza dei fosfori semplicemente non esiste, in quanto la fonte luminosa (ovvero il sistema di lampade di retroilluminazione) è
costantemente attiva: con questo tipo di schermi non
sono tecnicamente possibili tremolii o sfarfallamenti.
L’unico criterio di scelta per la frequenza di quadro è
quindi quello di poter avere animazioni fluide. In teoria quindi, considerando i limiti percettivi dell’occhio
umano, potrebbero bastare frequenze di quadro di
24 Hertz, tuttavia si preferisce avere comunque valori alti anche per contrastare il fenomeno dell’inerzia dei cristalli liquidi, che porta a tempi di risposta
bassi. Pertanto anche sui pannelli LCD generalmente
le frequenze di refresh sono comprese fra i 60 e i 75
Hertz.
Un terzo aspetto che si intreccia con la questione
della frequenza di refresh è quello della cosiddetta
profondità di colore, ossia il numero di bit utilizzati
per descrivere il colore di ciascun pixel, da cui dipende direttamente il numero di sfumature di colore rappresentabili sullo schermo. Per una maggiore fedeltà
d’immagine sarebbe idealmente preferibile avere infinite sfumature possibili (modello di colore analogico). Questo però non è tecnicamente realizzabile con
la tecnologia digitale, per cui ci si deve accontentare
che il sistema supporti un certo numero di sfumature
discrete. Se il numero di sfumature è sufficientemente
alto, la differenza fra due livelli successivi di sfumatura diventa così tenue da non essere percepibile dall’occhio umano, cosicché, agli effetti pratici, il sistema
sarebbe equiparabile a un sistema analogico, almeno
per la maggior parte degli utilizzatori (la diatriba è
analoga a quella del confronto fra i CD audio, digitali,
e gli LP in vinile, analogici).
Il problema sta nel fatto che
per distinguere e trattare molte 14
sfumature occorre rappresentare i pixel con numeri sempre
più precisi. Se ogni pixel potesse essere o bianco o nero, basterebbe 1 bit per pixel. Se ogni
pixel potesse assumere un colore a scelta fra 8, basterebbero
Lezione 7
15
IT administrator - Hardware
Naturalmente il chip che fa da ponte fra RAM video
e uscita VGA deve supportare entrambi i requisiti. Tale chip è detto RAMDAC (RAM Digital-to-Analog Converter, figura 15). Sono occorsi anni perché le schede
grafiche e i monitor soddisfacessero ai requisiti minimi per supportare la modalità true color ad alta risoluzione e ad alta frequenza di refresh.
Adattatori grafici
3 bit per pixel. Per disporre di una scelta maggiore di
colori, occorre un numero crescente di bit per ogni
pixel dello schermo. Un livello ritenuto sufficiente per
la maggior parte degli impieghi è quello di 256 livelli
di intensità di colore per ciascuno dei tre colori primari; questo dà luogo a 256x256x256=oltre 16 milioni
di possibili sfumature discrete di colore, abbastanza
per approssimare da vicino una gamma di colori continua, tant’è vero che questo tipo di sistema di colore è spesso definito “true color”. Poiché bastano 8 bit
per memorizzare numeri interi a scelta fra 256 valori
possibili, e i colori primari sono 3, occorrono 3x8=24
bit per pixel per trattare immagini “true color”. Ma
per uno schermo ad alta risoluzione questo si traduce in un notevole fabbisogno di memoria: per esempio, uno schermo 1.024x768 in true color richiede 2.3
Mbytes di RAM video: un quantitativo che oggi non
pone problemi di costo, ma 10-15 anni fa una scheda
grafica con 1 Mbyte era già da considerarsi molto ben
attrezzata, visto che nella stessa epoca il PC aveva
magari un solo Mbyte anche per quanto riguardava la
memoria centrale. Insomma, il true color ad alta risoluzione era impraticabile per ragioni di costo. Così, un
espediente consisteva nello scegliere un sottoinsieme
(detto “tavolozza”, o “palette”) di 256 colori fra i 16
milioni di colori possibili, e usare poi soltanto colori della palette (figura 14). Poiché questa comprende
256 colori, la loro modellizzazione richiede soltanto
8 bit per pixel: in questo modo si riduce a un terzo il
fabbisogno di memoria. E’ ovvio che questa soluzione
un po’ contorta aveva senso soltanto quando la RAM
era molto costosa. Ma c’era anche un altro impedimento tecnico all’aumento contemporaneo di risoluzione, profondità di colore e frequenza di refresh. Se
il segnale video deve trasportare l’informazione necessaria per rigenerare, poniamo, 85 volte al secondo
un’immagine di 1600x1200 punti, e ogni punto ha una
profondità di colore di 24 bit, i circuiti convertitori digitale-analogico che leggono la RAM e producono il
segnale VGA in uscita devono inviare al monitor le informazioni relative a 1.600x1.200x85 = circa 163 milioni di pixel al secondo. E poiché ogni pixel richiede la
lettura di 3 bytes, gli stessi chip devono leggere ogni
secondo 163x3= circa 490 Mbytes di memoria video
al secondo. Questo significa due cose:
• da un lato il monitor deve poter trattare segnali video ad almeno 163 MHz, in altre parole avere una
“banda passante” di almeno 163 MHz;
• dall’altro la RAM video della scheda grafica deve
poter essere letta ad una velocità di almeno 490
Mbyte al secondo.
Fig. 15 - Il RAMDAC
(RAM Digital-to-Analog
converter) è il chip ad
altissima velocità che
si incarica di formare il
segnale video analogico
a partire dalle descrizioni
numeriche delle
sfumature di colore dei
pixel dello schermo
1.10.2 Adattatori
grafici
L’altro componente hardware nella catena video
è l’adattatore grafico, spesso chiamato “scheda grafica” per il fatto che spesso è montato sul bus e non
integrato sulla motherboard. Il suo compito è quello
di supportare il sistema operativo e le applicazioni
software nella composizione dell’immagine e nella generazione del segnale video. È detto “adattatore” perché si interpone fra la rappresentazione interna dello
schermo e il segnale richiesto dal monitor e si occupa
di convertire la prima nel secondo.
I più comuni standard di risoluzione grafica
Per anni il principale parametro distintivo degli
adattatori grafici è stato la risoluzione massima raggiungibile (vedi tabella nomi di standard grafici, anno
introduzione sul mercato e risoluzione). Dopo gli obsoleti standard CGA ed EGA, lo standard VGA (Video
Graphics Array, 640 x 480 pixel, 256 MB RAM) fissò
finalmente un livello di risoluzione e colore più che
adeguato per le applicazioni in modalità testo e sufficiente anche per le prime applicazioni grafiche, fra
cui il mitico Windows 3.0. La crescita delle risoluzioni da allora fu incessante: seguirono infatti lo standard Super VGA (SVGA, 800x600), XGA (1.024x768),
SXGA+ (1.440x1.050) e Super XGA, con proporzioni 5:4
(SXGA, 1.280x1.024), Ultra XGA (UXGA, 1.600x1.200)
oltre ai vari formati wide screen con proporzioni
16:10; per esempio WXGA+ da 1.440x900 pixel (diffuso solo su monitor LCD da 19” wide) oppure WSXGA+
(1.680x1.050, usato su monitor wide da 20” e 22”) e
WUXGA (1.920x1.200, usato su monitor da 24” wide).
Componenti di base delle schede video
La struttura logica di una scheda grafica (figura
16) comprende i seguenti elementi, oltre al già citato
RAMDAC:
• Circuiti di inter- 16
connessione al
bus di sistema
(AGP, PCI, PCI-X,
PCI-e): sono attraversati da dati e comandi provenienti dalle librerie grafiche e
destinati a controllare il funzionamento dell’adattatore grafico. Soprattutto nella
grafica tridimensionale usata nei giochi più evoluti
è importante che questi circuiti supportino un’elevata banda passan- 17
te per non
costituire un collo
di bottiglia
dell’architettura (figura 17).
• GPU
PC Open 115 Ottobre 2007
1.10.2.1 Essere
al corrente dei più
comuni standard di
risoluzione grafica,
quali: VGA, SVGA,
XGA
1.10.2.2 Conoscere
i componenti di
base delle schede
video, quali: GPU,
memoria, Video
BIOS, RAMDAC, e la
relativa funzione.
Fig. 16 - Così si presenta
una recente scheda
grafica di fascia alta:
a causa dell’elevata
quantità di calore
dissipato dalla veloce
GPU, gran parte del
circuito è coperta da un
sistema di dissipazione
attivo con circolazione
forzata dell’aria
Fig. 17 - Il bus di sistema
ha subito un’evoluzione
per consentire
l’installazione di schede
video sempre più
affamate di banda verso
la CPU e la memoria
centrale. Dopo PCI, AGP
(1x-2x-4x-8x) e PCI-X, si è
consolidata una tendenza
all’adozione degli slot
PCI Express. In figura,
accanto a tre slot PCI,
sulla destra vediamo due
slot PCI Express x1 e uno
slot x16
IT administrator - Hardware
Fig. 18 - Sulle schede
video ad alta risoluzione,
alta frequenza di
refresh e alta profondità
di colore, magari
con accelerazione
tridimensionale per
giochi, GPU e RAMDAC
hanno bisogno di poter
continuamente leggere e
scrivere enormi quantità
di memoria ad alta
velocità. Per questo le
tecnologie per la RAM
“di frontiera” vengono
spesso applicate
sulle schede grafiche
prima ancora che per
l’impiego come memoria
di sistema. Addirittura
esistono tipi di memoria
specializzati per l’uso su
schede grafiche: è il caso
dei chip GDDR3 in figura
1.10.2.4 Conoscere
le differenti versioni
di AGP, le modalità
di funzionamento e i
rispettivi vantaggi
1.10.2.3 Conoscere
i più comuni tipi
di memorie video,
dai moduli SDRAM
ai DDR2-SDRAM.
Conoscere inoltre le
relative differenze e
vantaggi
Fig. 19 Lo slot AGP 8x (in
verde in figura) offre il più
alto livello di prestazioni
raggiunto dalla tecnologia
AGP prima che PCI-X
e soprattutto PCI
Express gradualmente
prendessero il
sopravvento come
standard per il bus di
sistema ad alta velocità.
Rispetto ad altre versioni
dello standard, l’AGP
8x utilizzava tensioni
di lavoro più basse per
aumentare le prestazioni
e al tempo stesso ridurre
i consumi elettrici e la
dissipazione termica
(Graphics Processing Unit): un vero e proprio microprocessore specializzato nell’elaborazione video. È in grado, per esempio, di scorrere (scroll)
orizzontalmente o verticalmente regioni di schermo, facilitando il funzionamento dei sistemi operativi a finestre; oppure di riempire (fill) regioni di
schermo con colori o con motivi geometrici (textures), o ancora di calcolare ombreggiature (shading)
e illuminazione (lightning) nelle scene tridimensionali; può anche gestire trasparenze, spostamenti di
blocchi di memoria (Bit Block Transfer: “BitBlt”) e
tracciare icone e soggetti mobili (sprites) in sovrimpressione sulla scena di sfondo, nonchè rilevare
collisioni fra questi soggetti. Le GPU specializzate nella grafica tridimensionale possono occuparsi autonomamente di ricalcolare le coordinate dei
vertici degli oggetti a seguito di rotazioni e traslazioni, e di ricalcolare immediatamente sfumature,
ombreggiature e riflessi. Per questo devono eseguire molto velocemente calcoli matematici con elevata precisione su insiemi (vettori) di numeri che
rappresentano coordinate nello spazio. Le entità
manipolabili sono normalmente punti e triangoli
(o poligoni di grado superiore); pertanto la velocità
di una GPU, anziché in MIPS, viene spesso espressa
in triangoli/secondo o in “texture elements” (texels)
al secondo.
• Memoria video: una regione di RAM in cui viene
memorizzata la descrizione dei pixel che compongono l’immagine da visualizzare su schermo. Fondamentalmente ogni pixel è qui rappresentato da
un certo numero di bit, generalmente 16, 24 o 32
bit. Maggiore è la quantità di memoria video, maggiori saranno la risoluzione e la profondità di colore raggiungibili, ma soprattutto, per l’uso con videogiochi, sarà maggiore l’estensione del repertorio di textures che potranno essere precaricate
sull’adattatore grafico, consentendo di comporre
scene di elevata complessità grafica senza più impegnare la CPU o il canale di comunicazione con
essa, ossia il bus di sistema.
• Video BIOS: così come il PC necessita di un programma precaricato che lo governa nelle prime fasi
all’accensione e che sovrintende alle operazioni di
I/O più elementari, anche la scheda video, che assomiglia per certi versi a un PC autonomo essendo
dotata di RAM e GPU propria, ha un proprio BIOS.
I più comuni tipi di memorie video
Abbiamo visto che la memoria video, detta anche
“frame buffer”, ha un ruolo fondamentale per il funzionamento della scheda grafica. Oltre alla sua quantità, le sue caratteristiche in termini di velocità d’accesso, bus e localizzazione nell’architettura hanno
notevole impatto sulle prestazioni che la scheda è in
grado di fornire.
La prima distinzione è fra la RAM video dedicata e
quella condivisa. Nel primo caso, sulla scheda video
è fisicamente presente un banco di memoria riservato
alle sue esigenze operative. Nel secondo caso, la scheda video fa uso di una porzione della RAM di sistema,
con due inconvenienti: sottrae spazio all’esecuzione
delle applicazioni e richiede di impegnare il bus di sistema quando la GPU ha bisogno di elaborare l’immagine, oppure quando il RAMDAC ha bisogno di generare il segnale video leggendo il frame buffer.
Avere la RAM video dedicata direttamente a bordo
della scheda grafica ha anche un altro vantaggio non
secondario. È possibile organizzare il banco di memoria e il bus che lo collega alla GPU e al RAMDAC in modo tale che la banda passante sia elevatissima, così da
supportare alte prestazioni video e grafiche. Inoltre
PC Open 116 Ottobre 2007
Lezione 7
è possibile 18
impiegare
della RAM
a
doppia porta
(dual-ported), che
è possibile leggere
e scrivere
simultaneamente:
mentre la
GPU compone l’immagine o ne elabora ombre, luci,
texture e sfumature, il RAMDAC può leggerla e generare il segnale video. In altri schemi circuitali la GPU
e il RAMDAC devono alternarsi nell’accesso alla RAM
video, con prestazioni inferiori in quanto ciò le costringe a spartirsi la banda del bus interno.
L’ultimo fattore che caratterizza la memoria video
è la tecnologia costruttiva dei chip. Proprio come la
RAM di sistema è passata da SDRAM a DDR-SDRAM,
poi DDR2 e DDR3, in cui i chip lavorano in modalità
double data rate (DDR) per aumentare la banda, con
successivi miglioramenti circuitali per aumentare il
throughput a parità di frequenza di lavoro, lo stesso
tipo di evoluzione ha interessato la RAM montata a
bordo delle schede grafiche. Piccoli perfezionamenti
(rivolti soprattutto a ottimizzare i consumi elettrici e
la dissipazione termica) sono stati applicati nel corso degli anni alle normali memorie DDR, formando un
corteo parallelo di standard riconoscibili per l’iniziale
“G” (Graphics). Sono così comparse le memorie GDDR2, GDDR3 (figura 18) e la recente GDDR4, non ancora molto diffusa sulle schede grafiche.
Le differenti versioni di AGP
Un modo per accelerare il funzionamento della
scheda video è quello di velocizzare il più possibile
il canale di comunicazione fra CPU e adattatore grafico: si tratta del bus, che appositamente per le schede
grafiche ha subito diverse evoluzioni tutte tese ad aumentare la banda. È così che è nata la “dinastia” delle
tecnologie Accelerated Graphics Port (AGP). La prima
versione del bus AGP fece la sua comparsa nel 1997.
Adottava una larghezza di canale a 32 bit come quella del normale bus PCI, ma lavorava a frequenze più
elevate con uso di ulteriori tecniche per aumentare la
frequenza efficace.
Nel bus AGP 1x, per esempio, la frequenza era di
66 MHz, il doppio del PCI, e la banda era anch’essa
doppia: 266 Mbyte/s. Le successive evoluzioni di AGP
hanno mantenuto la larghezza di canale a 32 bit ma
hanno aumentato la frequenza efficace mediante tecniche come dual-pumping o quad-pumping. Sono nati così gli standard AGP 2x, AGP 4x e AGP 8x, capaci
di assicurare rispettivamente bande massime di 533,
1.066 e 2.133 Mbyte/
s. Lavorando a fre- 19
quenze così elevate, questi bus andavano incontro
anche a problemi
elettrici che è stato
possibile attenuare
riducendo progressivamente la tensione di lavoro: se
l’AGP 1x funzionava
a 3.3V, l’AGP 8x usava tensioni di soli
0.8V (figura 19).
Lezione 7
Dissipazione termica e soluzioni di raffreddamento
Non solo le schede grafiche AGP, ma anche quelle PCI-X e quelle PCI-Express (che usano dei bus non
specificamente votati alla grafica, ma destinati a un
utilizzo con qualunque tipo di periferica) grazie anche
all’ampia disponibilità di banda verso la CPU, possono puntare alle massime prestazioni.
Ma questo richiede grandi quantità di memoria
video e, soprattutto, una GPU operante ad alte frequenze di clock: due componenti entrambi “affamati”
di corrente, tanto che molte schede di fascia alta richiedono un’alimentazione supplementare rispetto a
quella, limita20
ta, che può
venire dalle linee 5V
presenti sul
connettore
del bus e per
questo presentano un
connettore
Molex, uguale a quello a 4 pin degli hard disk oppure del tipo a
6 pin, a cui va collegato uno dei cavi che escono dall’alimentatore interno (figura 20). Come sempre quando vi sono consumi elettrici elevati, il rovescio della
medaglia è costituito da una altrettanto elevata produzione di calore. Si vengono così a creare problemi
di dissipazione termica anche per la scheda grafica,
proprio come avviene per CPU, chipset e RAM di sistema. Non a caso quasi tutte le schede grafiche di fascia alta sono equipaggiate con un sistema di dissipazione attivo, con ventola dedicata, corpi alettati e in
molti casi anche un convogliatore sagomato in modo
tale da guidare il flusso d’aria in modo ottimale (figura 20). Inutile dire che questo sistema consuma a sua
volta corrente e
soprattutto è 21
fonte di rumore,
per cui nei sistemi destinati all’uso come Media Center da
salotto la scelta
dell’adattatore
grafico richiede
particolare attenzione.
1.10.3 Librerie grafiche
Il terzo attore fondamentale della catena logica
che arriva a produrre immagini effettivamente visibili nello schermo è un componente non hardware,
ma software. Si tratta di quell’insieme di algoritmi e
sottoprogrammi che, sotto il controllo delle applicazioni software e del sistema operativo, si incaricano
di comporre e manipolare l’immagine nella rappresentazione interna immagazzinata nella video RAM.
Per esempio, possono svolgere compiti semplici, come comandare all’hardware grafico di scorrere verticalmente il contenuto di una finestra quando l’utente
aziona con il mouse la barra di scorrimento, oppure
possono occuparsi di mansioni decisamente più complesse, come consentire alle applicazioni software la
manipolazione di modelli tridimensionali riversando
sulla scheda grafica il flusso di ordini necessario ad
attuare e visualizzare le trasformazioni richieste.
In sostanza, le librerie grafiche assolvono a due funzioni fondamentali:
• Forniscono un insieme standard di metodi (tecnicamente detti “primitive grafiche”) messo a dispo-
IT administrator - Hardware
sizione delle applicazioni software per operare facilmente su immagini;
• Nascondono le differenze esistenti fra le capacità
dell’hardware grafico dei vari modelli di PC, consentendo alle software house di scrivere applicazioni e giochi che funzioneranno su qualunque
macchina (seppure con prestazioni differenziate
in base alle potenzialità della scheda grafica).
La libreria DirectX
In ambiente Microsoft Windows, con il termine DirectX si intende una famiglia di librerie di algoritmi e
sottoprogrammi software con cui l’applicazione o il
gioco può ottenere un accesso praticamente diretto
(Direct) a varie funzionalità multimediali della macchina, collettivamente indicate dalla lettera “X”: la famiglia comprende librerie per gestire la sezione audio
(DirectSound), il sistema per la riproduzione di contenuti video (DirectShow), quello per la gestione di giochi con supporto di modalità multiplayer via rete (DirectPlay), quello per la gestione di periferiche di input,
fra cui tastiere e mouse ma anche joystick e altri tipi
di game controllers (DirectInput). Non mancano ovviamente una libreria per la gestione della grafica bidimensionale (DirectDraw) e una per operare su scene
tridimensionali (Direct3D). Le librerie DirectX, introdotte per la prima volta nel 1995, hanno subito continue evoluzioni; l’ultima versione prima del lancio di
Windows Vista era la versione 9, con le sue sottovarianti; Windows Vista, con le sue notevoli innovazioni all’interfaccia grafica (Aero) ha introdotto la nuova
versione 10 e per il momento è l’unico sistema operativo Microsoft che possa disporne. Particolari versioni delle DirectX sono utilizzate anche nelle console
per videogiochi di Microsoft: Xbox e Xbox360.
La libreria OpenGL
Se DirectX è la soluzione di Microsoft per la definizione di un set di librerie multimediali, inclusa la grafica, OpenGL (Open Graphics Library) è uno standard
non proprietario per una libreria esclusivamente grafica (2D e 3D) che qualunque hardware grafico può
scegliere di supportare, qualunque sistema operativo
può adottare e qualunque software grafico può richiedere per il proprio funzionamento. OpenGL è inizialmente nato (1992) per macchine come workstation
grafiche o sistemi dedicati per CAD, fino a qualche
anno fa gli unici in grado di offrire prestazioni grafiche sufficienti a un impiego professionale, ma col
tempo i PC hanno colmato il gap e da anni OpenGL è
disponibile anche sui PC. Questo significa che un applicativo grafico destinato originariamente alle workstation Unix, ma scritto dalla software house utilizzando OpenGL, può essere facilmente “portato” su
Windows, ma anche Linux o Mac OS. Naturalmente
ciò vale anche per i giochi basati su OpenGL: basti
pensare che il supporto OpenGL ad alte prestazioni è
disponibile anche sulla PlayStation 3.
Come DirectX, OpenGL presenta agli applicativi
un set di funzionalità uniforme, qualunque sia la lingua effettivamente parlata dall’hardware sottostante
e qualunque sia il set di capacità effettivamente supportate dall’hardware; delle 250 funzioni grafiche previste dallo standard, quelle che l’adattatore grafico
eventualmente non potesse supportare in modo diretto saranno emulate via software. Per l’applicazione
software non farà alcuna differenza (salvo un leggero
calo di prestazioni).
Questo significa che, come per DirectX, è possibile
scrivere applicazioni OpenGL disinteressandosi dell’hardware grafico che queste avranno a disposizione
durante il funzionamento.
PC Open 117 Ottobre 2007
1.10.2.5 Conoscere
i problemi di
dissipazione termica
e le soluzioni di
raffreddamento.
1.10.3.1 Essere al
corrente della libreria
DirectX
Fig. 20 - Il problema della
dissipazione termica
su GPU, RAMDAC e
Video RAM sulle schede
grafiche di fascia alta sta
diventando sempre più
acuto. Questo modello
combina varie soluzioni:
per la GPU una ventola
con dissipatore radiale
in rame, per il banco
RAM un grosso corpo
alettato e perfino per
il RAMDAC un piccolo
dissipatore passivo. Il
tutto, su molte schede
grafiche, è occultato da
un ingombrante “carter”
1.10.3.2 Essere al
corrente della libreria
OpenGL
Fig. 21 - Le moderne
schede grafiche ad
alte prestazioni non
possono “accontentarsi”
della potenza elettrica
fornita dal connettore
del bus e richiedono
una connessione
supplementare diretta
dall’alimentatore (in
qualche caso addirittura
due). Il connettore è di
solito un Molex a 4 o
6 pin. Gli alimentatori
di modello recente
in genere sono
predisposti per questo
tipo di collegamento e
dispongono dei relativi
cavi
1.10.3 Librerie
grafiche
IT administrator - Hardware
1.11 Stampanti
Stampanti
Se le immagini video sono il primo e più immediato
modo di presentare informazioni all’utente, e di supportare un utilizzo altamente interattivo dei programmi e del sistema operativo della macchina, la produzione di stampe su carta (o altro supporto materiale
stampabile: CD e DVD, magliette, pellicole, …) riveste
un’importanza non certo inferiore, specie in tutta una
serie di campi professionali.
Della conversione di immagini logiche in immagini
fisicamente presentate su supporto materiale si occupano le stampanti. Queste si differenziano in base al
principio fisico di funzionamento: passiamone in rassegna i principali tipi.
1.11.1 Tipi
1.11.1.1 Essere al
corrente delle diverse
tecnologie di stampa,
quali: a impatto/
matrice di punti,
getto d'inchiostro e
laser.
1.11.1.2 Conoscere
i principi di
funzionamento di
una stampante a
impatto/matrice
di punti, le relative
limitazioni e vantaggi
1.11.1.3 Conoscere
i principi di
funzionamento di
una stampante a
getto d'inchiostro, le
relative limitazioni e
vantaggi
Fig. 22 - Nelle vecchie
stampanti ad impatto
ad aghi era prevalente
l’uso di carta a modulo
continuo (con i tipici bordi
bucherellati per il sistema
di trascinamento).
Fig. 23 - Le stampanti ad
aghi potevano stampare
ad alta velocità font
semplici, ma potevano
anche costruire immagini
e font più elaborati
lavorando in modalità
grafica, spesso con
più passate (e quindi a
velocità più bassa). Ad
ogni passata venivano
applicati più punti,
fino a campire le aree
e a ottenere le forme
richieste
Diverse tecnologie di stampa
Esattamente come avviene nel caso dei monitor,
anche dal punto di vista della stampante le immagini
sono costituite da schiere di innumerevoli punti colorati. Il problema di stampare un’immagine grafica o
un testo si riconduce quindi al problema di stampare
con grande precisione e a velocità accettabile milioni
di minutissimi puntini. Limitandoci al caso classico
della stampa su carta, qualunque sia la tecnologia di
stampa adottata il problema fondamentale da risolvere è quindi quello di tracciare sul foglio un puntino elementare (nero, grigio o colorato) trasferendo
la giusta quantità di inchiostro del colore richiesto, il
tutto nel minor tempo possibile.
Questo si può fare in vari modi, a seconda della tecnologia di stampa usata: ricordiamo la stampa a impatto, quella a trasferimento termico, quella a getto
d’inchiostro (ink jet) e quella laser.
Lezione 7
le righe solo in una direzione, per esempio da sinistra
a destra; dopo ogni riga il carrello doveva tornare alla
posizione di riposo, con una notevole perdita di tempo. Successivamente comparvero le stampanti “bidirezionali”, in cui la testina era capace di stampare le
righe anche in senso opposto, eliminando la necessità della fase di ritorno, e quelle “ottimizzate”, in cui
il cammino della testina era mantenuto il più corto
possibile studiando la lunghezza effettiva delle righe
da stampare.
Le stampanti dot matrix erano rumorose e puittosto lente (almeno quelle economiche, destinate a
un mercato consumer o SOHO), quasi mai potevano
gestire le stampe a foglio singolo, offrivano una risoluzione troppo bassa per una stampa di qualità ed
erano assai meno adatte alla grafica che alla stampa
di testi. Nella maggior parte dei casi erano monocromatiche, anche se gli “esperimenti” di stampanti dot
matrix a colori non sono mancati. A differenza delle
stampanti inkjet o laser, la qualità di stampa degradava in modo “analogico”, a causa del progressivo esaurimento dell’inchiostro del nastro; le stampe sbiadivano e a un certo punto si doveva decidere di cambiare
la cartuccia inchiostrata.
Essendo però perfettamente adatte a gestire stampe a modulo continuo erano ideali per la produzione
di log, registri di funzionamento, elenchi di anomalie,
cronologia degli accessi, e così via; questo è il campo
applicativo in cui hanno resistito più a lungo, aiutate
dal fatto che la tecnologia a impatto permette di stampare più copie contemporaneamente utilizzando fogli
multipli alternati a carta carbone oppure con speciali
inchiostri sul retro (carta chimica).
Stampante a getto d'inchiostro
Stampanti a impatto/matrice di punti
Nelle vecchie stampanti a impatto ad aghi, o a matrice di punti (dot matrix), il supporto poteva essere
un singolo foglio di carta o più spesso il cosiddetto
“modulo continuo”: un nastro di carta contornato da
due striscioline bucherellate su cui si impegnavano
delle ruote dentate in grado di imprimere l’avanzamento al foglio (figura 22). La stampa avveniva grazie
a una testina di stampa, provvista di una matrice di
minuscoli aghi, che poteva scorrere orizzontalmente,
visitando tutta la larghezza del foglio, e durante questo movimento colpire, per mezzo di tali aghi, regioni
puntiformi di un nastro inchiostrato spingendolo contro il foglio; gli aghi venivano esposti di qualche millimetro grazie a un sistema elettromagnetico basato
su minuscoli solenoidi, uno per ciascun ago. L’impatto così provocato fra una regione puntiforme del nastro e il foglio produceva un puntino nero persistente.
Normalmente la testina comprendeva un certo numero di aghi (tipicamente 9 o 24), con altezza sufficiente a stampare i caratteri di una riga. Così, spostando orizzontalmente la testina di stampa si potevano
stampare i caratteri di una riga, mentre azionando le
ruote dentate si poteva passare alla stampa della riga
successiva. Immagini o font più complessi si potevano ottenere lavorando in modalità grafica, a velocità
minore (figura 23).
Le prime stampanti a impatto potevano stampare
22
23
PC Open 118 Ottobre 2007
Le stampanti a getto d’inchiostro tracciano puntini
su carta non percuotendola con un nastro inchiostrato, ma “spruzzandola” con minutissime gocce d’inchiostro (figura 25). Questo viene fatto da una testina
di stampa che scorre trasversalmente al foglio, mentre il foglio stesso viene fatto avanzare da un sistema
a rulli. Come si vede, concettualmente queste stampanti non sono molto diverse da quelle a matrice di
aghi, ma vi sono due differenze fondamentali: primo,
la matrice di punti è enormemente più fine, in quanto
i microtubi che emettono le gocce d’inchiostro possono essere molto più piccoli degli aghi; secondo, non
essendovi impatti fra aghi e foglio, il sistema di stampa è assai più silenzioso e anche più veloce.
Le stampanti a getto d’inchiostro possono infatti
raggiungere una risoluzione molto alta – anche 360
dpi nei modelli più recenti – realizzando stampe estremamente nitide e dettagliate, e la loro velocità può
raggiungere valori ottimi, anche se è cronicamente
sovrastimata nelle brochure pubblicitarie. Altro vantaggio delle ink jet rispetto alle dot matrix sta nel fatto che con esse risulta tecnicamente molto più facile
produrre stampe a colori. E’ sufficiente che il gruppo
testine sia in grado di emettere gocce d’inchiostri colorati oltre a gocce d’inchiostro nero.
Le differenze fra i modelli ink jet riguardano soprattutto
• la densità e il numero degli ugelli della testina di
stampa, che determinano la risoluzione massima
delle stampe e, in parte, anche la velocità di stampa
• la separazione, o l’integrazione, fra serbatoi d’inchiostro e testine, che determina anche importanti
variazioni nei costi dei materiali di consumo
• Il numero di colori d’inchiostro usati, che determina la fedeltà con cui possono essere riprodotti i colori attraverso miscelazioni delle gocce in propor-
Lezione 7
IT administrator - Hardware
24 zioni opportune:
a parte il nero, di
solito sono usati
da 3 a 7 colori
Nella valutazione dell’acquisto
di una stampante
ink jet bisogna tenere sempre ben
conto del costo
tutt’altro che trascurabile dei materiali di consumo (inchiostro e testine, che in alcuni
modelli sono separati). In molti casi i produttori propongono sul mercato le stampanti a prezzi tenuti artificialmente bassi (in certi casi possono anzi arrivare a
venderle in perdita) puntando sui profitti della vendita di materiali di consumo. Per difendere questa fonte di reddito, speciali espedienti tecnici (e in qualche
caso anche legali) vengono escogitati per contrastare
il fiorente mercato delle cartucce rigenerate o compatibili e quello delle ricariche.
Stampanti laser
Le stampanti laser, analogamente a quanto avviene
nelle fotocopiatrici, depongono uno speciale inchiostro solido, detto toner, sui punti giusti del foglio di
carta e ve lo fissano pressandolo per pochi istanti con
una superficie ad elevata temperatura.
La tecnica usata per posizionare con precisione i
punti sul foglio funziona come segue (figura 24):
• La superficie di un rullo (“drum”) in materiale fotoconduttore (ad esempio composti del selenio)
viene caricata elettrostaticamente; questa fase è
chiamata carica.
• Un laser emette luce verso uno specchio rotante
che indirizza la sua luce verso tutti i punti di una
riga del rullo prima che questo passi alla riga successiva. Il puntino di luce laser produce sul rullo
l’effetto di neutralizzare localmente la carica elettrostatica precedentemente deposta in quella regione. Il laser si accende e si spegne in modo accuratamente sincronizzato per controllare lo stato di
carica di ciascuno dei punti della riga. Questa fase
è chiamata esposizione.
• Il rullo così caricato comprende ora una immagine
elettrostatica dei punti da deporre sul foglio che rispecchia esattamente il testo o la grafica da stampare. Nella sua rotazione, la parte appena trattata
viene esposta a un’atmosfera ricca di particelle di
toner elettricamente cariche, le quali saranno attratte dalle regioni rimaste cariche. In questo modo
l’immagine elettrostatica diventa una maschera di
punti di toner. Questa fase è detta sviluppo.
• Continuando la sua rotazione, il rullo cosparso di
toner entra in contatto con il foglio di carta, sul
quale si trasferisce la polvere di toner. Il rullo torna “pulito” ed elettrostaticamente neutro (eventualmente dopo un breve processo di rigenerazione attuato in un arco di alcuni gradi di rotazione),
ed è pronto per un nuovo ciclo. Questa fase è detta
trasferimento.
• Il foglio di carta con la polvere di toner depositata
ma non ancora fissata passa attraverso una sezione in cui appositi rulli ad alta temperatura (200 gradi circa) pressano fortemente il toner sul foglio fino
a fonderlo in modo definitivo. Questa fase è detta
fissaggio o fusione.
Le stampanti laser a colori ripetono gran parte di
questo processo (fino al trasferimento) per ciascuno dei colori primari, fino a comporre le sfumature
necessarie. In generale, quindi, una stampa laser a
25
colori è alcune
volte più lenta di
una monocromatica (una passata per il nero più
una per ciascuno
dei tre colori primari). La velocità
di una stampante
laser può comunque essere notevolmente più alta di quella di una stampante a getto d’inchiostro. Gli
altri vantaggi delle stampanti laser consistono nella
costanza di rendimento, nel costo per pagina competitivo, nell’autonomia operativa e nella capacità di
sopportare altissimi volumi di stampa.
Stampa per trasferimento termico
e processo di sublimazione
Le stampanti a trasferimento termico, spesso usate nelle etichettatrici portatili, nei fax o nei registratori di cassa, impiegano nastri inchiostrati dai quali
“staccano” piccole porzioni di colore e le depositano
sul foglio di carta, grazie a un procedimento termico,
per formare i punti da stampare. Anche se dal nastro
sono state asportate solo piccole regioni di colore,
esso non può più essere riutilizzato (a differenza di
quanto avviene con i nastri delle stampanti a impatto) in quanto i punti utilizzati restano completamente privi di inchiostro. Si ha quindi un notevole spreco
di materiali di consumo, anche se la stampa avviene
velocemente e in modo silenziosissimo.
Una variante di questa tecnologia, detta “stampa a
sublimazione”, impiega una riserva di inchiostro solido ceroso che viene fuso o vaporizzato, trasferito sul
foglio e qui miscelato con gli altri colori primari, nelle
esatte proporzioni richieste per formare la sfumatura
voluta (figura 26). Le sfumature non vengono quindi
ottenute per “illusione ottica”, con semplice accostamento di punti dei colori primari, ma effettivamente
“mescolando” i colori. Il risultato è una stampa in cui
le sfumature sono continue, particolarmente adatta
quindi alle applicazioni fotografiche. Proprio in virtù
del fatto che le sfumature variano con continuità da
un pixel a quello adiacente, il numero di colori ottenibili con questo sistema è virtualmente infi- 26
nito (anche se i dosaggi d’inchiostro possibili
rimangono comunque
un numero finito). Fra
gli svantaggi, la stampa non velocissima, la
forte dipendenza della
qualità del risultato finale dai supporti usati
e il costo.
Installazione e gestione
Fino all’avvento delle porte USB, la più diffusa interfaccia per il collegamento delle stampanti era la IEEE
1284, meglio nota come Centronics o “porta parallela”, ancor oggi presente sul back panel di molti PC
desktop e, più raramente, su quello di alcuni portatili
destinati a un’utenza business.
La velocità di una porta Centronics era in origine limitata a soli 300-500 Kbps, un valore che oggi appare
decisamente scarso, ma che all’epoca era senz’altro
interessante, ben superiore a quanto normalmente
raggiungibile con l’altro tipo di porta general purpose di cui erano dotati i computer, ossia la porta se-
PC Open 119 Ottobre 2007
Fig. 24 - Le testine di
stampa dei modelli ink
jet comprendono un gran
numero di microugelli
accoppiati con altrettante
microcamere piene
d’inchiostro. Un sistema
di riscaldamento è in
grado di creare in tempi
brevissimi una bolla di
vapore la cui pressione
espelle una minuscola
goccia d’inchiostro in
direzione del foglio. Il
ciclo si ripete ogni volta
che è necessario che
l’ugello stampi un puntino
Fig. 25 - Nelle stampanti
laser l’immagine formata
deponendo toner sulle
aree elettricamente
cariche della superficie
di un tamburo rotante
(drum) viene trasferita sul
foglio per contatto e poi
impressa definitivamente
mediante fusione ad
alta temperatura. Il
foglio viene poi avviato
al carrello d’uscita. Le
aree con carica elettrica
vengono create sul drum
da un sistema di laser e
specchi sincronizzati con
estrema precisione
1.11.1.4 Conoscere
i principi di
funzionamento di una
stampante laser, le
relative limitazioni e
vantaggi
1.11.1.5 Essere
al corrente della
metodologia
di stampa per
trasferimento termico
e processo di
sublimazione
Fig. 26 - Nella stampa
a sublimazione, un
inchiostro solido
trasportato da un nastro
viene vaporizzato e
trasferito sul foglio
sotto l’effetto del calore
generato dalla testina
retrostante. La quantità
di inchiostro trasferibile
è regolabile con estrema
precisione
1.11.2 Installazione
e gestione
1.11.2.1 Essere
al corrente delle
differenti tipologie
costruttive di porta
parallela, quali:
Standard, ECP, EPP.
Conoscere inoltre le
relative differenze.
IT administrator - Hardware
Fig. 27 - I connettori
usati per la porta
parallela sono, lato PC,
un DB-25 con fissaggio
a vite (sopra) e lato
stampante un Centronics
Amphenol a 36 pin con
fissaggio ad alette di
ritegno (sotto).
Fig. 28 - La connessione
USB ha un campo
d’impiego praticamente
universale. Sui PC ha
sostituito rapidamente
anche la porta parallela
per la connessione delle
stampanti.
1.11.2.2 Essere
al corrente delle
diverse modalità
d'interfacciamento
fra PC e stampante,
quali: parallela,
seriale, USB,
wireless, LAN.
Fig. 29 - Nelle stampanti
fotografiche portatili è
diffuso il supporto per
connessioni Bluetooth.
Ciò permette di inviare
un’immagine e ottenerne
la stampa senza fili e
in tempo brevissimo.
In alcuni modelli di
stampanti il supporto
Bluetooth si ottiene
inserendo un adattatore
USB; in altri la circuiteria
è integrata all’interno
della stampante
27
riale RS-232-C. Le prestazioni
erano superiori principalmente perché su una porta parallela vengono scambiati 8 bit
di dati ad ogni ciclo di trasferimento, contro il singolo bit
trasferito da una porta seriale; inoltre, per garantire l’integrità dei dati, una porta seriale può far precedere e seguire
i dati da due bit di “guardia” (“bit di start” e “bit di
stop”) e accompagnare i dati con un bit di parità per
rilevare eventuali errori di trasferimento; tali bit devono anch’essi viaggiare sulla stessa linea su cui viaggiano i bit di dati e quindi “consumano” fino a 3/8 della
banda disponibile su una porta RS-232-C: una porta
parallela non soffre di questo overhead.
Nonostante le prestazioni della porta parallela
fossero superiori a quelle di una porta seriale, nel
caso della stampa di immagini o di documenti misti (testo+grafica) la quantità di dati da trasferire alla
stampante è alquanto elevata ed è desiderabile contenere il più possibile i tempi; ciò ha richiesto un aumento di velocità di trasferimento, che è stato ottenuto introducendo due successive evoluzioni della
porta Centronics: queste sono note come Enhanced
Capability Port (ECP) di tipo bidirezionale (ma a senso
alternato, ossia half duplex) capace inoltre di gestire
dispositivi compositi grazie all’introduzione del concetto di “canali” indipendenti, ed Enhanced Parallel
Port (EPP), uno standard alternativo proposto da Intel e altri; queste due varianti possono raggiungere, in
condizioni ideali (cavi di tipo adeguato e non troppo
lunghi, periferiche abilitate, BIOS adeguato) velocità
di trasferimento rispettivamente di 4 e 2 megabyte/
secondo. Il connettore fisico tuttavia rimane lo stesso di una porta parallela originale, ossia, lato PC, un
classico DB-25 a 25 pin con fissaggio a vite e un Centronics Amphenol a 36 pin con alette di ritegno laterali
a scatto (figura 27).
I cavi paralleli contengono un numero di conduttori superiore a quello dei cavi seriali o USB e quindi
sono piuttosto spessi, rigidi, pesanti e anche costosi.
Da non dimenticare, infine, che per poter utilizzare
le estensioni ECP e EPP è generalmente necessario
abilitarle in modo esplicito nel BIOS del PC, che deve
supportarle; anche il sistema operativo deve essere
provvisto dei necessari driver (oggi è sempre così ma
in origine non si poteva darlo per scontato).
Interfacciamento fra PC e stampante
Oggi però la porta parallela è solo una delle opzioni di collegamento fra PC e stampante e, per la verità,
neppure la più usata; la sua importanza è infatti entrata in fase declinante da quando esiste la ben più
pratica porta USB, che assicura semplificazione del
cablaggio, riduzione degli ingombri del connettore e
ottime prestazioni (questo vale soprattutto nel caso
della USB 2.0, ormai universalmente diffusa, che può
raggiungere i
480 Mbps). (fi28
gura 28)
Oltretutto il
collegamento
tramite porta
USB è supportato in modo
nativo da BIOS
e sistemi operativi recenti e
consente il riconoscimento
PC Open 120 Ottobre 2007
Lezione 7
plug-and-play del tipo di stampante, con selezione del
relativo driver, se disponibile, da un elenco di driver
preinstallati (in genere però il fabbricante ne fornisce
sempre uno specifico e più aggiornato).
La disponibilità di un collegamento ad alte prestazioni tra PC e stampante ha consentito, fra l’altro, di
migliorare le prestazioni delle cosiddette Windows
Printers, o GDI Printers. Si tratta di stampanti laser
molto semplificate e quindi economiche, in quanto
delegano al PC host tutto il lavoro di composizione
(“rasterizzazione”) dell’immagine, gestione dei font,
ottimizzazione di grafica e mezze tinte, e si aspettano
che l’immagine finale da stampare su carta (diversi
megabyte per pagina!) sia loro trasferita via USB.
Queste stampanti sono totalmente dipendenti dal
PC e da Windows e non possono funzionare senza di
essi (in assenza del driver per Linux, ad esempio, risultano totalmente inutilizzabili con tale ambiente),
tuttavia possono avere un prezzo molto competitivo.
Con la ridotta velocità delle porte parallele sarebbe
stato sostanzialmente impraticabile realizzare stampanti di questo tipo: il funzionamento sarebbe stato
troppo lento.
Non vanno poi dimenticate altre opzioni di collegamento che eliminano la necessità di un PC acceso
per poter usare la stampante: si tratta delle interfacce
di rete, con le quali la stampante diventa accessibile
sulla LAN proprio come se fosse collegata via USB o
Centronics a un PC della rete stessa (tenuto sempre
acceso) e da questo condivisa. I modelli di stampanti che supportano questa modalità sono spesso detti
“stampanti di rete” e sono adatti all’uso dipartimentale, mentre è più dubbia la loro utilità in ambito Small
Office – Home Office (SOHO) in quei casi in cui vi è un
unico PC e nessuna necessità di condivisione. Da ricordare che il collegamento alla rete può essere di tipo Ethernet o wireless: in quest’ultimo caso, l’accesso alla stampante è possibile via WiFi ed è possibile
ubicare la stampante anche in un locale dove la rete
wired non arriva. Sarà però necessario, ovviamente,
che i PC siano dotati di adattatore di rete wireless, o in
alternativa che sulla LAN sia installato un bridge WiFi
per consentire l’accesso anche ai PC con cavo.
Infine, sempre a proposito di connessioni wireless,
non va dimenticata l’interessante opzione dell’interfaccia Bluetooth. Da un punto di vista logico il collegamento Bluetooth sostituisce un collegamento locale via porta seriale, con la comodità dell’assenza
di cavi e connettori, che rende possibile interagire
con una vasta gamma di dispositivi abilitati, come
cellulari, smartphone e palmari (ma anche notebook
e PC desktop, se dotati di adattatore Bluetooth). Data la banda piuttosto limitata del Bluetooth, però,
(circa 700 Kbps per Bluetooth 1.x e circa 2 Mbps per
Bluetooth 2.0) questo tipo di connessione non si presta certo a grossi carichi di lavoro o al trasferimento di grandi quantità di dati per il trattamento di documenti complessi. Pertanto troviamo l’interfaccia
Bluetooth non certo su stampanti dipartimentali, ma
piuttosto su piccole e
compatte stampanti
29
fotografiche, nelle quali questo tipo di interfaccia trova impiego
ottimale consentendo,
ad esempio, di inviare
in 3-4 secondi una foto
scattata dal cellulare e
di ottenerne subito la
stampa: una soluzione
pratica e di grande effetto (figura 29).
IT administrator - Hardware
Materiale didattico
progettato per EUCIP
IT Administrator
segnalato da AICA
Modulo 1 - Hardware
“AICA, Licenziataria
esclusiva in Italia
del programma
EUCIP (European
Certification
of Informatics
Professionals)
riconosce che il
materiale didattico
segnalato è
strutturato in
modo coerente con
l’organizzazione dei
contenuti prevista
dai documenti
EUCIP di riferimento.
Di conseguenza
AICA autorizza sul
presente materiale
didattico l’uso
dei marchi EUCIP
(registrato dal CEPIS
Concil of European
Professional
Informatics
Societies) ed AICA
protetti dalle leggi
vigenti.”
1.12 Hardware
di rete
Fig. 1 - Il tipo di
connessione di rete
più comune è ancora il
classico cavo Ethernet
categoria 5 in rame,
costituito da 4 coppie di
conduttori intrecciati e
attestati su connettori
modulari RJ-45 a 8 poli.
Tuttavia, dal punto di vista
teorico, un collegamento
di rete wireless è
equivalente
Fig. 2 - I cablaggi di rete
collegano gli apparati
attivi di rete fra loro e
ai PC. In una rete wired
i tipi fondamentali di
apparati attivi sono gli
switch, i router e gli
hub, ma tutti hanno un
aspetto simile, con un
pannello di connettori
RJ45 in numero variabile
a seconda della classe
del dispositivo e della
complessità della rete da
gestire
Lezione 8
A scuola con PC Open
Hardware
di rete
PDF DEL CORSO
NEL DVD
Dalle connessioni cablate a quelle senza fili, le diverse
tipologie di reti locali e le possibilità di accesso a Internet.
Cavi, componentistica e standard che si utilizzano per mettere
in comunicazione due o più PC di Marco Mussini
’unione fa la forza. Così si potrebbe riassumere
il vantaggio principale a cui si punta collegando
in rete più PC, stampanti e hard disk. È possibile
condividere le risorse risparmiando e razionalizzando gli investimenti: anziché diverse stampanti economiche, ognuna collegata al proprio PC, è possibile risparmiare installandone una sola ad alte prestazioni
e con un costo per pagina inferiore e facendo in modo
che tutti i PC della rete possano “vederla”. Una rete
permette anche di mettere a fattor comune la capacità disco dei PC dell’ufficio, effettuare automaticamente il backup di tutti i PC da una macchina specializzata
e connessa alla LAN. Oppure è possibile condividere
l’accesso a Internet fra più PC, gestire in modo più rapido i trasferimenti di dati fra i PC locali senza passare
da Internet, e così via. Risparmio, semplificazione gestionale e aumento di produttività sono tutti evidenti
vantaggi della condivisione di risorse in rete.
Il funzionamento di una LAN, o Local Area Network
(rete locale) si basa su una corretta combinazione di
elementi hardware e software. Dal punto di vista del
software si tratta di sistemi operativi con supporto di
rete, drivers e applicativi. In particolare gli applicativi
comprendono client di posta elettronica, programmi
di instant messaging, web browsers, programmi per
telefonia via Internet (Voice Over IP, VOIP) e così via.
In questa puntata ci focalizzeremo naturalmente
sull’aspetto hardware delle reti, dapprima descrivendo la struttura di una rete e gli adattatori che permet-
L
Calendario delle lezioni
Lez. 1: la scheda madre e il BIOS
Lez. 2: i processori
Lez. 3: la RAM
Lez. 4: bus e risorse di sistema
Lez. 5: interfacce (prima parte)
Lez. 5: interfacce (seconda parte)
Lez. 6: memorie di massa
Lez. 7: i monitor, le schede grafiche
e le stampanti
Lez. 8: hardware di rete
Lez. 9: alimentatori e installazione nuovo
hardware
Lez. 10: risoluzione dei problemi
PC Open 110 Novembre 2007
tono ai PC di collegarsi a essa, poi analizzando gli
apparati attivi di rete che, insieme ai cavi, ne costituiscono l’infrastruttura. Infine accenneremo a uno
specifico ambito applicativo delle LAN, quello della
condivisione via rete dei dati (storage), di particolare
interesse tanto per le grandi organizzazioni quanto
per gli ambienti Small Office-Home Office.
Componenti principali
Al funzionamento di
una LAN partecipano i 1
seguenti attori:
• l’infrastruttura fisica
di rete, o cablaggio
(in rame o fibra ottica; concettualmente può essere sostituito da un collegamento wireless) (figura 1)
• gli apparati attivi di
rete che costituiscono i “nodi” su cui si
attestano i rami del
cablaggio e che interconnettono la rete locale con quella
esterna; (figura2)
• i personal computer e le applicazioni in esecuzione su di essi;
• le schede di rete (figura3) che consentono il collegamento fra i PC e l’infrastruttura di rete.
Degli apparati attivi ci occuperemo nella sezione successiva. Qui interessa ora descrivere la tipica
struttura delle reti di piccole dimensioni per ambienti
2
Lezione 8
3
IT administrator - Hardware
Small Office-Home Office (SOHO) e fare la
conoscenza con l’accessorio che permette ai PC di collegarsi
alla LAN: l’adattatore
di rete o “scheda di
rete”.
timizzata per evitare di sprecare banda (ossia un
pacchetto viene ritrasmesso, se possibile, soltanto
verso il raggio su cui si trova la destinazione). L’affidabilità è migliore di quella dei due casi precedenti
in quanto un singolo guasto al cablaggio di uno dei
raggi non interrompe il funzionamento di tutta la
rete, ma causa solo l’isolamento del PC che si attesta su quel raggio.
Le diverse strutture di rete
Le schede di rete
Il tipo più elementare di LAN è quello che interconnette due PC: si parla in questo caso di “rete punto
punto” o anche “paritetica” (figura 4). Nel caso della
connessione wireless, questo tipo di relazione è detto “ad hoc”. Nel caso di reti a cavo, i due PC vengono collegati con un particolare tipo di cavo Ethernet,
detto “cross”, perché inverte le posizioni di determinati conduttori in modo tale da mettere direttamente
in relazione il pin “trasmissione” del primo PC con il
pin “ricezione” del secondo PC, e
4 viceversa, senza bisogno di interporre un hub di rete o switch (v.
più avanti per una descrizione di
questi due elementi attivi).
Quando il numero di PC è superiore a 2, il che avviene nella stragrande maggioranza delle LAN da ufficio, la topologia
della rete, ossia l’organizzazione logica dei collegamenti, diventa necessariamente più articolata e complessa. Le principali topologie classiche sono tre:
• A bus (topologia rettilinea). Tutti i PC appartenenti
alla LAN si attestano su una stessa tratta di cavo di
rete, che deve rigidamente rispettare determinate
limitazioni sulla lunghezza massima a meno di non
usare dei ripetitori per supportare distanze maggiori. La tratta di cavo deve essere terminata a entrambe le estremità; la tolleranza ai guasti è bassa
in quanto è sufficiente una discontinuità in un tratto qualunque della LAN per interrompere le comunicazioni di tutte le macchine partecipanti.
• Ad anello. Nelle cosiddette reti “token ring”, gli host
collegati alla LAN sono collegati da tratte di cavo
che formano una topologia ad anello (anche se fisicamente gli archi di questo anello possono essere disposti come tratte di andata/ritorno verso un
centro stella). Sull’anello, in mancanza di traffico,
circola un “vagone vuoto”, detto token frame, che
passa ciclicamente da una macchina all’altra fino a
incontrare un host A che ha necessità di trasmettere dati a un host B. In questo caso l’host A carica i dati sul token frame e lo ritrasmette come data
frame. Il data frame inizia la sua visita dell’anello,
durante la quale raggiungerà B per poi completare
il giro. Al suo ritorno sull’host A verrà declassato
a token frame e ritrasmesso, autorizzando nuove
trasmissioni sull’anello. Un singolo guasto al cablaggio lungo l’anello compromette il funzionamento della rete.
• A stella (figura 5). Ogni PC è collegato individualmente a un centro, che interconnette i “raggi” della
stella assicurando il passaggio dei pacchetti di dati da un PC all’altro. A seconda che il centro sia un
hub o uno switch, l’interconnessione può essere
equivalente a un bus (ossia ogni pacchetto emes- 5
so da un PC viene ritrasmesso indistintamente
a tutti gli altri raggi della stella, come se tutti i
PC fossero elettricamente collegati a una stessa
tratta di LAN) oppure ot-
Nell’architettura PC il componente che consente
l’interconnessione fra il computer e la LAN è l’adattatore di rete (network adapter), detto anche, familiarmente, “scheda di rete” o LAN Card; un’espressione risalente ai tempi in cui i PC erano generalmente sprovvisti di una porta LAN e questa doveva quindi essere
aggiunta successivamente come accessorio sotto forma di scheda di espansione, che esponeva sul retro
il relativo connettore. Questo, a seconda del tipo di
cablaggio Ethernet utilizzato, poteva essere un connettore cilindrico coassiale BNC, uguale a quello usato in certe apparecchiature video analogiche, oppure
un connettore modulare RJ45 a 8 pin. Il connettore
BNC (figura 7) era utilizzato
nel caso di cavi coassiali (or- 6
mai caduti in disuso), mentre
l’RJ45, il tipo ormai universalmente diffuso, è usato per i
cavi UTP (Unshielded twisted
pairs: doppini intrecciati
non schermati) cat.5 e 6.
Oggi la circuiteria necessaria
è generalmente integrata sulla
motherboard,
e il connettore è
7
presente nel
pannello posteriore solidale con la motherboard stessa (figura 6). Per quanto riguarda le prestazioni, dai 10 Mbps della Ethernet originaria si è passati a 100 Mbps, con schede di rete retrocompatibili,
dette “10/100”, capaci di supportare entrambe le velocità selezionando automaticamente quella corretta
(“autosensing”); il passo successivo è stato il salto a
Gigabit Ethernet (1 Gbps) e a 10-Gigabit Ethernet, con
un’ulteriore accelerazione di un fattore 10. Spesso gli
standard relativi alle velocità più elevate vengono inizialmente proposti con cablaggi in fibra ottica (figura 8), anche se generalmente entro un certo tempo
la tecnologia dei più economici e pratici cablaggi in
rame riesce a colmare il gap e ad assicurare le stesse
prestazioni, spesso addirittura riutilizzando il cablaggio esistente.
Da notare che più la LAN è veloce, più deve essere veloce la scheda di rete, ed in particolare l’interconnessione
8
fra questa e il
PC, ossia il bus
su cui la scheda
si attesta. Il vecchio bus ISA, con
la sua banda di
circa 8 Mbytes/s,
era indubbiamente insufficiente
per una rete 100
Mbps (figura 9).
Un bus PCI è decisamente più
veloce (può trasferire in teoria
133 Mbytes/s)
PC Open 111 Novembre 2007
1.12.1.1. Conoscere
la struttura di una
rete semplice
1.12.1.2 Conoscere
le schede di rete
Fig. 3 - Un adattatore
di rete su scheda PCI.
Si tratta dell’anello di
collegamento fra il PC e
il cablaggio di rete. Tutti
i PC desktop e laptop
hanno una porta Ethernet
integrata direttamente
su motherboard, senza
necessità di espansioni
Fig. 4 - La topologia di
rete più semplice è quella
punto-punto in cui due PC
sono collegati in modo
diretto. Questo tipo di
collegamento richiede un
cavo di rete “cross”, in
cui le coppie di conduttori
sono incrociate per
mettere in contatto le
linee di trasmissione
di un PC con quelle di
ricezione dell’altro PC
Fig. 5 - La topologia a
stella è la più diffusa
nelle reti cablate attuali.
Vi è una connessione
diretta punto-punto fra
ogni singolo PC e una
porta del router, switch o
hub di rete. La quantità
di cavo impiegata può
risultare maggiore che
in una rete a bus, ma
in compenso ogni PC
dispone di tutta la banda
teorica verso il router
e complessivamente la
gestione del cablaggio
risulta ben razionalizzata
Fig. 6 - Sui PC desktop la
porta LAN è solitamente
montata in una sorta di
“torretta” metallica, in
abbinamento con porte
USB o FireWire. I due
LED giallo e verde che
affiancano l’incavo per
la molletta di ritegno
segnalano la continuità
di connessione e la
presenza di effettivo
traffico dati
Fig. 7 - Una vecchia
LAN card dotata di
connessione BNC (per
cavi di rete coassiali)
alternativa alla classica
RJ-45 (per cavi a doppini
intrecciati)
Fig. 8 - Oltre al cablaggio
in rame esiste
l’alternativa della fibra
ottica: qui vediamo una
scheda di rete ottica su
bus PCI-X operante a
velocità di 1Gbps.
Peraltro, questo livello di
prestazioni è ormai stato
largamente raggiunto
anche dal classico
cablaggio in rame.
IT administrator - Hardware
Fig. 9 - Una LAN card su
bus ISA. Questo tipo di
bus non consente alla
LAN card di trasferire,
nella migliore delle
ipotesi, più di 8 Mbyte/s:
risulterebbe quindi del
tutto inadatto alle reti
100 Mbps e Gigabit
Ethernet, le cui schede,
infatti, sono progettate
per bus più veloci come
il PCI, il PCI-X o il PCIExpress.
9
ma per non saturarlo né sfidarne i limiti teorici è decisamente preferibile un bus
più veloce, specie se la rete
è da 1 o 10 Gbps. Per questo
i più recenti bus PCI-X e soprattutto PCI Express (specie il x16) dispongono della
banda necessaria per reggere trasferimenti di dati ad alta velocità su reti di ultimissima generazione. Quando l’interfaccia di rete è integrata su motherboard è
poco evidente quale sia il tipo di bus al quale il chip
si interconnette, ma le specifiche tecniche della scheda dovrebbero indicarlo, o quantomeno dichiarare un
throughput di prestazioni minimo garantito.
Impianto di rete
Abbiamo parlato delle principali topologie di cablaggio delle LAN, ossia della struttura della rete, e
delle LAN Card, ossia l’anello di congiunzione fra PC
e rete. Ma l’infrastruttura di rete a cui si collegano i PC
è costituita anche da un altro elemento di fondamentale importanza: gli apparati attivi, che assicurano
l’interconnessione fra le tratte di cavo, permettono di
estendere la dimensione fisica della rete, consentono
di migliorare le prestazioni della LAN ottimizzando la
ripartizione del traffico e controllando l’utilizzo della
banda, migliorano la sicurezza della rete filtrando il
traffico sospetto o indesiderato, e così via.
1.12.2.4 Sapere
dell’esistenza di
apparecchiature di
rete quali router,
bridge e firewall
1.12.2.1 Sapere
dell’esistenza di
differenti tipi di HUB.
Fig. 10 - Un router si
occupa di instradare
i pacchetti di dati in
transito sulla rete verso
le rispettive destinazioni,
in base a determinate
regole. È dotato di un
certo numero di porte
LAN e generalmente di
almeno una connessione
dedicata per il
collegamento all’Internet
Provider (per esempio
tramite modem ADSL o
gateway per fibra ottica).
Può anche avere funzioni
di firewall per la sicurezza
della rete. I modelli
rivolti al mercato Small
Office-Home Office sono
sempre più spesso dotati
del supporto integrato
per connessioni WiFi: in
tal caso sul corpo del
router spiccano una o più
antenne
Sapere dell'esistenza di apparecchiature di rete
quali router, bridge e firewall
Un tipo di apparato attivo indispensabile per il funzionamento di Internet è il router (letteralmente: instradatore), che in una rete a pacchetto basata sul
protocollo IP si incarica di ridirigere il traffico dati
verso la destinazione finale (figura 10). Ogni pacchetto dati riporta nella propria intestazione (header) le
informazioni sull’indirizzo di provenienza e su quello di destinazione. Se la macchina di destinazione è
collegata alla rete locale, il pacchetto viene ricevuto
in modo diretto, senza bisogno di reinstradamenti di
alcun tipo. Se invece l’indirizzo è sconosciuto sulla
LAN, si deve presumere che esista altrove, per cui il
pacchetto deve essere mandato all’esterno, contando sul fatto che la rete “extranet” (WAN, wide area
network) saprà recapitarlo a destinazione; per questo il pacchetto viene inviato a un host denominato
“default gateway” che si incarica di reinstradare i pacchetti non destinati a indirizzi dell’ambito locale.
La categoria di apparati che prende questo tipo
di decisioni sulla strada da far seguire ai pacchetti
dati è quella dei router. I router agiscono sulla base
di regole, impostate dagli amministratori di rete ed
espresse in termini di indirizzi (o prefissi di indirizzi) e schede di rete: per esempio: “avviare alla porta
LAN3 tutto il traffico diretto ad indirizzi che iniziano
con 153.178.*.*”. Particolari indirizzi “jolly” di questo
tipo, solo parzialmente specificati, sono detti netmask
e sono usati per modellare gruppi di indirizzi contigui,
che assumono il significato di sottoreti. Le regole di
routing possono così essere riferite a insiemi circoscritti di PC, per limitare l’ambito di applicabilità e per
meglio dominare la
complessità del pro- 10
blema dell’instradamento del traffico. I
router sono utilizzati sia per connettere
una LAN a una WAN,
sia nei nodi di inter-
PC Open 112 Novembre 2007
Lezione 8
scambio delle WAN o fra le WAN.
Nel primo caso essi sono solitamente dotati di due
porte: una interna, verso la LAN, e una esterna, verso
la WAN; le regole di instradamento saranno evidentemente molto semplici. Nel secondo caso possono avere anche decine di porte e un numero elevatissimo di
regole, che provvedono al miglior instradamento fra
varie alternative possibili, in base a numerosi criteri
di scelta.
Un altro tipo di apparato attivo di rete è il bridge.
Questo si occupa di interconnettere due o più tratte
di LAN, “imparando” automaticamente quali indirizzi
fisici di rete esistono su ognuna di esse ed instradando di conseguenza i pacchetti in arrivo verso la LAN
su cui si attesta l’host destinatario. Un bridge non è
in grado di interpretare gli indirizzi IP e non conosce
il concetto di sottoreti o netmask; la sua conoscenza
degli host presenti sulle LAN collegate si limita ai loro
indirizzi fisici (MAC address) e si basa soltanto sulla
captazione di messaggi spontanei di notifica emessi
dai PC della rete per asserire la propria esistenza e
per dichiarare il proprio indirizzo.
Un firewall è invece un sorvegliante incaricato di
vigilare sulla sicurezza della rete. Si occupa di filtrare
il traffico IP in transito, consentendo alle connessioni
“innocue” di passare ma bloccando quelle “sospette”. Per esempio, potrebbe bloccare le connessioni
entranti da Internet e lasciar passare quelle uscenti.
Il funzionamento del firewall è stabilito da regole configurabili dall’amministratore di rete; il criterio per
decidere come trattare una connessione può basarsi
sull’indirizzo (o sottorete) di origine o di destinazione, sulla porta TCP interessata lato client o lato server; alcuni firewall esaminano perfino i dati scambiati
nella connessione e la sequenza di richieste e risposte
e tentano in base a ciò di scoprire il tipo di traffico per
stabilire se è ammesso oppure no (questa tecnica è
nota come Stateful Packet Inspection).
Sapere dell’esistenza di differenti tipi di HUB.
Da un punto di vista topologico un hub è analogo
a uno switch: interconnette due o più tratte di LAN,
consentendo al traffico di passare dall’una all’altra
(figura 11). Ma a differenza dello switch, in cui i pacchetti vengono esaminati per decidere a quale (unica)
LAN propagarli sulla base dell’indirizzo fisico di destinazione, un hub non effettua alcun controllo, e ogni
pacchetto viene ripropagato su tutte le LAN (esclusa
solo quella di provenienza, su cui sarebbe evidentemente inutile ripeterlo). Il suo funzionamento è quindi più semplice e vi è anche una certa semplificazione
costruttiva. Tuttavia, poiché tutto il traffico in entrata
da una LAN viene replicato su tutte le altre LAN, anche su quelle che non contengono l’host di destinazione, di fatto un hub spreca una notevole quantità di
banda rispetto a uno switch. In determinate applicazioni, però, un hub è addirittura necessario.
Per esempio, se si deve diagnosticare un problema di rete con un analizzatore di traffico (sniffer), per
avere informazioni complete è necessario che questo
possa esaminare tutto il traffico. Se il centro di connessione è costituito da uno switch e lo sniffer viene
collegato a una porta di questo switch, esso non potrà ricevere che la sola quota di traffico che lo switch
riconosce come destinato a lui: tutto il rimanente traffico non gli verrà trasmesso, e l’analisi risulterà impossibile. Il problema si risolve utilizzando un hub
anziché uno switch. In queste condizioni, su ogni LAN
(e quindi anche su quella a cui è collegato lo sniffer)
viene replicato tutto il traffico ricevuto, e l’analizzatore potrà esaminare tutti i pacchetti inviati da qualsiasi
host collegato all’hub.
Lezione 8
Gli hub differi- 11
scono principalmente per il numero di porte (in genere almeno 4), anche se non raggiungono mai il numero di porte di uno
switch, in quanto,
proprio per la loro
proprietà di replicare indiscriminatamente il traffico a tutte le LAN, se
le LAN collegate sono troppe si arriverebbe presto a
congestione.
Dato il modo di funzionamento dell’hub, che replica il traffico su tutte le LAN tranne solo quella di provenienza, senza fare distinzioni in base all’host di origine, sulle sue porte di norma non vi sono distinzioni
sul ruolo delle LAN da collegare.
Sapere dell’esistenza di differenti tipi di switch
Viceversa, nel caso di uno switch, poiché questo
ha l’effetto di “focalizzare” il traffico decongestionando le tratte non interessate quando la destinazione si
trova su una LAN nota, vi è una notevole differenza
fra questo caso e quello in cui la destinazione non sia
direttamente collegata allo switch, ma raggiunta attraversando altri hub o switch (figura 12).
Per questo il pannello dei collegamenti riporta
spesso un’indicazione particolare “uplink” su una delle sue porte: in una rete organizzata per “strati” logici
(ad esempio: dorsale dipartimentale ad alta velocità a
cui sono collegate varie “isole” che raccolgono il traffico di alcune postazioni PC) a tale porta va collegato
il cavo che collega allo switch della LAN gerarchicamente superiore, attraverso la quale saranno indirettamente raggiungibili altri indirizzi fisici.
L’architettura interna dello switch può essere organizzata in modo tale da avvantaggiarsi di questo vincolo di collegamento risparmiando sulla complessità
circuitale. Ma soprattutto vi è il problema del cavo
di collegamento fra i due switch, che idealmente dovrebbe essere di tipo cross: nei modelli dotati di porta
uplink dedicata è però possibile usare un cavo normale nonostante la controparte sia ancora uno switch e
non un PC. Altri modelli hanno un’architettura interna più completa, in grado di gestire indifferentemente
connessioni uplink (con cavi normali o cross) su qualsiasi porta: si parla allora di “auto uplink”.
Anche nel caso degli switch è poi importante la differenziazione in base al numero di porte, che, data la
separazione dei flussi di traffico tipica dello switch,
può anche raggiungere valori molto elevati senza che
ogni LAN collegata risenta del traffico di tutte le altre.
Concettualmente, a condizione che lo switch svolga
correttamente il proprio lavoro, potrebbe esservi un
numero arbitrariamente alto di porte LAN.
Il problema è che al crescere del numero di porte
IT administrator - Hardware
LAN, cresce anche (linearmente con il numero di porte) il numero di pacchetti che devono essere esaminati dal processore di rete dello switch per stabilire a
quale LAN debbano essere ripropagati: la CPU dovrà
quindi essere sempre più veloce (e dovrà esserci anche una crescente quantità di RAM per memorizzare
le tabelle di instradamento che lo switch “impara”
man mano che scopre gli indirizzi fisici degli host collegati). Inoltre, la circuiteria interna dello switch deve
assicurare che il traffico proveniente da qualsiasi LAN
possa essere reindirizzato a qualunque altra LAN.
La rete interna che assicura questa interconnessione a matrice, “tutti con tutti”, ha una complessità concettuale che cresce col quadrato del numero
di porte.
Anche se esistono schemi circuitali ottimizzati, per
esempio con struttura gerarchica ad albero, che assicurano prestazioni quasi equivalenti a quelle della
matrice completa, pur con una complessità inferiore
(non quadratica rispetto al numero di porte), resta
il fatto che costruire uno switch con elevato numero di porte è notevolmente più complesso rispetto
a costruirne uno con un numero di porte inferiore,
oppure rispetto a costruire un hub con lo stesso numero di porte.
Per questo gli switch con elevata connettività (figura 13) hanno spesso un costo notevolmente elevato,
specialmente se la matrice interna offre elevate prestazioni. In particolare, uno switch strutturalmente
in grado di offrire connettività completa fra qualsiasi
coppia di sue porte, senza che la matrice interna possa mai trovarsi ad aver esaurito le proprie risorse, è
detto “nonblocking”.
13
Un altro fattore di differenziazione fra i modelli di
switch riguarda la loro capacità di essere “gestiti”, ossia il fatto che dispongano di una interfaccia di controllo attraverso la quale sia possibile regolare alcuni
parametri di funzionamento per migliorare le prestazioni o per adattarle alle esigenze della particolare situazione d’impiego.
Uno switch Ethernet “non gestito” si autoconfigura e ha un comportamento del tutto autonomo. Uno
switch gestito potrebbe invece permettere, in aggiunta, di regolare da un’interfaccia Web o via SNMP la velocità delle porte, o di abilitare particolari protocolli
di rete, o ancora di definire delle Virtual LAN per gestire in modo più chiaro una grossa rete partizionandola in più sottoreti virtuali.
12
Switch con supporto di telefonia via Internet/
VoiceOver IP (VoIP).
Alcuni switch sono dotati di capacità più evolute
rispetto alla semplice interconnessione di LAN con
ripropagazione selettiva del traffico. Ultimamente,
per esempio, si vanno diffondendo anche nel mercato Small Office – Home Office degli switch di rete che
integrano capacità VOIP. In alcuni casi si tratta di dispositivi altamente integrati che comprendono modem ADSL, switch, router, firewall, access point WiFi e
connessioni telefoniche analogiche, rispetto alle quali
l’unità si comporta da adattatore per VOIP.
PC Open 113 Novembre 2007
Fig. 11 - Un hub di
rete replica su tutte le
linee il traffico ricevuto,
senza eseguire alcuna
elaborazione “logica” per
tentare di indirizzare il
traffico a destinazione.
Per questa ragione è
tecnicamente meno
complesso e più
economico, ma non
favorisce un impiego
efficiente della banda
disponibile sulla rete
1.12.2.2 Sapere
dell’esistenza
di differenti tipi
di switch (porte,
gestito, non gestito,
ecc).
Fig. 12 - Uno switch
a 5 porte con porta
di uplink separata.
Lo switch instrada i
pacchetti ricevuti in base
all’indirizzo fisico della
loro destinazione, se ne
è nota l’ubicazione. Se
una porta è collegata
a cascata a un altro
switch o hub, il cavo
dovrebbe essere cross.
In caso contrario si può
usare un cavo normale,
ma su alcuni modelli è
necessario “aiutare”
l’unità collegando il
cavo a una porta ben
precisa, che a volte
va usata in alternativa
a una delle porte
standard. Gli switch più
moderni non richiedono
questa accortezza
perché rilevano
automaticamente, per
ogni porta, di che tipo
è il cavo collegato,
eliminando il problema
(“auto uplink”). Con il
termine “auto sense” ci
si riferisce invece alla
capacità di selezionare
la massima velocità
consentita da ciascun link
Fig. 13 - Uno switch
Ethernet a 48 porte
1.12.2.3 Sapere
dell’esistenza di
switch con supporto
di telefonia via
Internet/VoiceOver IP
(VoIP)
IT administrator - Hardware
1.12.3.1 Sapere
dell’esistenza
dei NAS (Network
Attached Storage)
1.12.4.1 Conoscere
le modalità di
funzionamento di
una connessione
Wi-Fi
Fig. 15 - Un wireless
router con tecnologia
MIMO. Molti wireless
router incorporano
un certo numero di
porte Ethernet wired.
In questo senso la
connessione WiFi a uno
o più PC è assimilabile
a un insieme di porte
Ethernet supplementari,
semplicemente basate
su una tecnologia
trasmissiva diversa da
quella del tradizionale
cavo
Fig. 14 - Un dispositivo
NAS (Network Attached
Storage). All’interno
trovano posto normali
meccaniche IDE o SATA e
un controller con sistema
operativo autonomo che
supporta la gestione e
la condivisione via rete
dei dischi. Generalmente
è presente supporto
RAID per aumentare le
prestazioni o l’affidabilità
del sistema. Il NAS
funziona autonomamente
esportando i suoi file
system sulla rete e
non richiede di essere
stabilmente collegato a
un PC acceso
Lezione 8
NAS, i dischi in rete
Wi-Fi, connessioni senza fili
Come abbiamo accennato in apertura, uno dei principali motivi che spingono a creare una rete locale è
quello di condividere risorse fra i sistemi. Fra i tipi di
risorsa che è più frequente condividere in rete troviamo le stampanti e soprattutto i dischi. Proprio per
quanto riguarda i dischi osserviamo che in una rete
di PC la modalità tipica per condividerli è la funzionalità di condivisione offerta da Windows. In questo sistema, un PC acceso e con Windows funzionante può
rendere disponibile una cartella o anche un intero disco agli altri PC della rete, purchè per l’accesso vengano forniti username e password validi (se previsti
dal modello di security supportato dalla versione di
Windows usata).
Questo schema di condivisione è ben noto e molto facile da usare, ma non è privo di svantaggi. Quello
principale è che se il disco condiviso è particolarmente importante ed è richiesto che sia sempre disponibile, con questo schema è necessario che il PC che fa da
server venga mantenuto costantemente acceso, con il
suo consumo elettrico non trascurabile. Inoltre, trattandosi di un PC con Windows, da un punto di vista di
sicurezza di rete esso soffre delle varie vulnerabilità
che vengono via via scoperte e corrette da Microsoft;
richiede insomma un certo impegno amministrativo.
Se poi tale PC coincide con un desktop utilizzato da
uno degli utenti della rete, e questo utente non pone
la dovuta attenzione nella protezione della propria
macchina contro virus e malware, non si può escludere il caso di una perdita di dati anche grave che potrebbe naturalmente coinvolgere le cartelle o i dischi
che quel PC condivide in rete.
Per questi motivi, se si desidera una migliore garanzia di disponibilità del servizio, è consigliabile separare anche fisicamente il ruolo dei PC client (che usano
le informazioni) da quello dei server (che si occupano
esclusivamente di condividere dischi). Se il numero
di dischi o cartelle da condividere in rete non è troppo elevato, il server, anziché essere un PC dedicato,
può anche ridursi al disco stesso, purchè dotato di
interfaccia di rete: si parla in questo caso di Network
Attached Storage (NAS) perché il disco è collegato direttamente alla rete, anziché essere collegato a un PC
collegato a sua volta alla rete. (figura 14)
I consumi elettrici si riducono, poiché la quantità di
hardware da alimentare è ridotta al minimo (la meccanica del disco e il suo controller), e l’amministrazione, specie con i moderni modelli gestiti via interfaccia
web, è davvero semplice. Inoltre il sistema operativo
dedicato usato dai NAS ha l’unica funzione di esportare il disco in uno dei protocolli previsti e di offrire
un’interfaccia amministrativa web, ha una complessità molto inferiore a quella del sistema operativo tradizionale (Windows o Linux) che gira su un PC o su un
server. Pertanto esso è 14
tendenzialmente meno
soggetto a
contenere un
gran numero
di vulnerabilità latenti ed
è di conseguenza meno
“attaccabile”
e può offrire
un maggior
livello di sicurezza.
La grande novità degli ultimi anni nel campo del
networking, specialmente per impieghi in ambito residenziale e Small Office, nonché per l’uso in viaggio,
è indubbiamente l’introduzione della tecnologia wireless e il suo continuo perfezionamento, che ne sta ormai avvicinando le prestazioni a quelle di una classica rete cablata. Non c’è dubbio infatti che in ambito
domestico l’eliminazione della necessità di passare
cavi e forare pareti sia un apprezzatissimo vantaggio.
Quanto all’utilizzo nomadico, poi, la tecnologia di rete
wireless (o WiFi, considerato l’acronimo di “Wireless
Fidelity”) si può considerare non semplicemente come un miglioramento, ma come la vera e propria tecnologia abilitante: non sarebbe 15
infatti pratico
che in un luogo
pubblico come
una sala congressi, un’area
di servizio autostradale o una
sala d’attesa
dell’aeroporto
vi fossero fasci
di cavi Ethernet
cat.5 a disposizione dei viaggiatori.
PC Open 114 Novembre 2007
Le modalità di funzionamento
di una connessione Wi-Fi
Concettualmente una connessione WiFi agisce
come sostituto di una tratta via cavo, seppure con
qualche differenza operativa dipendente dalla natura
wireless della tecnologia sottostante. Infatti, se in una
rete a cavo risulta sempre immediatamente evidente
chi è collegato a che cosa (basta osservare o seguire
i cavi), non è così per una rete wireless, in cui le connessioni non sono palesi: l’utente deve sapere a quale
rete è connesso il suo PC, e l’amministratore di rete
deve sapere chi si sta collegando alla rete e deve avere modo di limitarli.
Altra particolarità delle reti wireless è la facilità di
intercettazione: il segnale radio è diffuso da antenne
omnidirezionali e chiunque si trovi entro il raggio di
copertura del segnale può ricevere le trasmissioni
esattamente come il legittimo destinatario. Allo stesso modo, è possibile trasmettere al posto del legittimo mittente, magari approfittando di un suo momento di silenzio, ingannando il ricevente con messaggi falsi, riprodotti o alterati. Occorrono quindi delle
contromisure che garantiscano l’identificazione della
controparte e che impediscano la lettura dei messaggi intercettati. Questo si ottiene utilizzando tecnologie crittografiche, che attraverso la cifratura dei dati
trasmessi rendono di fatto inutile l’intercettazione dei
segnali (i messaggi raccolti sarebbero infatti incomprensibili per chiunque non conosca la password di
decifrazione). Inoltre, poiché la comunicazione è possibile soltanto a chi sia in possesso delle credenziali o
password necessarie, questo schema assicura anche
l’identificazione della controparte (almeno fintantochè la segretezza della password rimane tale).
Ricordiamo che nelle reti WiFi vi sono due modalità
operative fondamentali:
• La modalità ad hoc interconnette due PC ed equivale all’uso di un cavo “cross” collegato direttamente
alle porte Ethernet delle due macchine.
• La modalità infrastructure si basa sulla presenza di
Lezione 8
un access point, che fa da centro stella comportandosi come un hub di rete wireless: all’access point
sono collegati punto-punto tutti i singoli PC della
rete WiFi.
Se la rete wireless è composta da due soli PC, uno
dei quali eventualmente collegato a Internet, è possibile risparmiare utilizzando la modalità ad hoc. Se invece i PC sono più numerosi, se il servizio va offerto
al pubblico, se si desidera che l’accesso sia sempre
possibile senza dover tenere costantemente acceso
un PC, allora la modalità idonea è quella infrastructure. L’access point può essere collegato al modem
ADSL o fibra, oppure può integrare direttamente tali funzioni; qualche volta integra anche uno switch
Ethernet a 4 porte. In tal caso si parla generalmente di
wireless router o wireless gateway anziché di access
point puro e semplice.
Principali modulazioni nel Wi-Fi, le relative
capacità di trasferimento e le limitazioni
Le attuali tecnologie WiFi standard sono tre, una
delle quali non diffusa in Europa, e corrispondono a
tre sottovarianti di un unico standard, l’IEEE 802.11.
La variante “b” supporta una banda di 11 Mbps lavorando sulle frequenze dei 2.4 GHz; la variante “g” arriva a 54 Mbps lavorando sulla stessa banda. La variante “a”, utilizzata soprattutto in USA, offre anch’essa
una banda di 54 Mbps ma opera sui 5 GHz.
Accanto agli standard ufficiali è comparso sul mercato un gran numero di prodotti facenti uso di tecnologie proprietarie di accelerazione implementate da
vari chipset concorrenti; a seconda del chipset adottato da un determinato prodotto WiFi (access point,
scheda PCI, adattatore USB) le prestazioni avranno
un determinato fattore di accelerazione, a condizione
che la controparte sia dotata anch’essa di accessori
basati sulla stessa tecnologia hardware, altrimenti il
comportamento tipico del chipset sarà quello di degradare le prestazioni al più alto livello standard supportato da entrambe le controparti (questo comportamento è il cosiddetto “fallback”). Nel caso di rete
wireless a cui partecipa un gran numero di PC, in genere è sufficiente che uno solo di essi sia equipaggiato
con una schede di rete obsoleta per costringere tutti
gli altri ad adattarsi, degradando le prestazioni. Fra le
principali tecnologie di accelerazione finora comparse sul mercato ricordiamo lo standard 22 Mbps, evoluzione dell’802.11b, e il 100 Mbps, il 108 Mbps e il 125
Mbps, tutte evoluzioni dell’802.11g.
La prossima evoluzione ufficiale dello standard sarà l’802.11n, operante sui 2.4 GHz ma anche sui 5 GHz,
la cui principale innovazione è l’introduzione della
tecnologia MIMO (Multiple Input-Multiple Output) che
affronta intenzionalmente tutti i problemi legati a percorsi di propagazione multipli, echi ed antenne multiple sfruttandoli per aumentare le prestazioni e la portata. Si prevede infatti che con l’802.11n si potranno
raggiungere oltre 200 Mbps di picco, ma in particolare, ciò che più conta, una banda tipica effettiva prossima ai valori massimi teorici. In sostanza le prestazioni
dovrebbero quadruplicare, e la portata raddoppiare,
rispetto all’802.11g “normale”. Purtroppo la ratifica
di questo standard sta impiegando molto tempo. Nella lunga attesa i produttori non se ne sono stati con
le mani in mano, ma hanno cercato di immettere sul
mercato prodotti che proponessero implementazioni proprietarie dei concetti e delle tecnologie MIMO.
In questo caso si sente spesso parlare di tecnologie
“pre-N”, “MIMO” o “draft-N”. Le prestazioni e la portata di questi dispositivi sono generalmente intermedie fra quelle dei più veloci prodotti “accelerati” di
generazione precedente e quelle promesse dal “vero”
IT administrator - Hardware
standard 802.11n. Il problema sta nel fatto che non è
possibile garantire con assoluta certezza che tali prodotti possano essere resi compatibili con la versione
definitiva dello standard semplicemente per mezzo
di un aggiornamento software. In rari casi, per evitare questa incertezza, i produttori hanno preferito attendere l’uscita del “vero” 802.11n prima di lanciare i
loro prodotti MIMO.
Dove utilizzare il WiFi
Le tipiche applicazioni della tecnologia di rete WiFi
comprendono
• l’accesso (rigorosamente da proteggersi a mezzo
WEP, WPA o WPA2) alla rete aziendale o dipartimentale da terminali laptop e PDA;
• l’accesso a Internet a pagamento da luoghi pubblici
(hot spots, sale d’attesa);
• l’accesso a Internet gratuito da luoghi ad accesso controllato (es. VIP lounge all’aeroporto, centri
congressi, sale conferenze, sale stampa)
• la “cablatura wireless” in ambito residenziale, che
evita il passaggio dei cavi o la foratura di muri.
• come caso particolare in ambito domestico, l’audio/video streaming da un server multimediale a
un dispositivo collegato al televisore e/o all’impianto HiFi; questo tipo di dispositivo è generalmente
definito “set top box” o “multimedia appliance”.
• automazione logistica in fabbrica e in magazzino,
per il collegamento fra il sistema ERP e terminali e
scanner mobili
Cominciano inoltre a diffondersi stampanti di rete equipaggiate con la scheda WiFi in affiancamento, o addirittura in sostituzione, della classica scheda Ethernet. Queste stampanti sono così utilizzabili
da qualunque PC si trovi nei dintorni, a condizione
di conoscere SSID e password (in caso di protezione
crittografica).
1.12.4.2 Distinguere
le principali
modulazioni
utilizzate nel Wi-Fi,
le relative capacità
di trasferimento e le
limitazioni di portata
1.12.4.3 Conoscere
le applicazioni
tipiche (per computer
portatili, stampanti
ecc.)
1.12.4.4 Sapere
dell'esistenza di
punti d'accesso,
adattatori PCI e
schede PC-card
wireless
Punti d'accesso, adattatori PCI
e schede PC-card wireles
I dispositivi che consentono concretamente di realizzare una rete WiFi e di attrezzare i PC perché possano collegarsi a essa sono di due tipi:
• L’Access Point (figura 16), necessario per realizzare le reti di tipo “infrastructure”, che funziona come un hub di rete wireless, al centro della “stella”
di collegamenti. Un access point “puro” si collega
via Ethernet a uno switch, a un modem ADSL o a un
Access Gateway per fibra ottica, e si occupa esclusivamente di fare da ponte fra la rete wired e quella
wireless. In qualche caso però l’access point è solo
una funzione di un apparecchio multiuso che integra uno switch di rete locale Ethernet, un modem
ADSL, un firewall e un router. In questo caso si parla spesso di wireless gateway o wireless router.
• Le schede di rete wireless, che a seconda delle esigenze possono essere confezionate come schede
PCI (da inserire sul bus interno nei sistemi desktop), come schede PCMCIA o ExpressCard (solo
per laptop e sempre più rare, visto che i laptop ormai sono quasi tutti regolarmente dotati di supporto WiFi) oppure come adattatori USB (per desktop
16
PC Open 115 Novembre 2007
17
Fig. 16 - Un access
point WiFi non instrada il
traffico come il wireless
router, ma si incarica
semplicemente di
interconnettere la parte
di rete wireless con
quella wired. Sarà come
se i PC dotati di scheda
wireless fossero attestati
comunque sulla rete
wired
Fig. 17 - Una scheda di
rete WLAN può essere
realizzata come scheda
PCMCIA o ExpressCard
(per portatili), come
scheda PCI (per desktop)
o come dispositivo USB,
per un utilizzo universale.
Alcuni modelli sono
provvisti di antenna
esterna
IT administrator - Hardware
Fig. 18 Un modem V.90
può raggiungere una
velocità di 56Kbps in
download. In passato
erano piuttosto diffusi
i modelli esterni con
collegamento seriale,
come quello in figura.
Alcuni erano in grado
di funzionare anche a
computer spento, come
segreteria telefonica,
o per ricevere i fax. Col
tempo hanno prevalso
i modem su scheda
interna PCI o integrati
su motherboard (come
nei portatili): quasi
tutti i PC oggi ne sono
dotati. La velocità di un
modem 56K è però ormai
insufficiente per quasi
tutti gli impieghi
e laptop) (figura 17). Molto rare le schede wireless
in formato Compact Flash o SDIO, per l’uso su palmari non dotati in origine della necessaria circuiteria.
Le schede di rete, come quasi tutti gli accessori
(anche Plug and Play) direttamente e stabilmente collegati al PC, richiedono sempre un driver che deve
essere fornito dal produttore insieme al prodotto. Oltre al driver spesso viene installata una utility di amministrazione e configurazione da cui si controllano
aspetti quali la crittografazione WEP/WPA, le reti a
cui collegarsi o i parametri tecnici radio della scheda. Anche Windows tuttavia dispone di una utility con
il medesimo scopo e non è possibile che i due sistemi di controllo siano attivi contemporaneamente. In
qualche caso quindi conviene non installare la utility
proprietaria, lasciando che sia Windows a gestire la
scheda di rete. Piuttosto difficoltosa, in genere, la reperibilità di drivers per Linux per le schede WiFi. Fortunatamente esiste una soluzione (ndiswrapper) che
in molti casi permette di riutilizzare sotto Linux il driver di rete per Windows.
A differenza delle schede di rete, gli access point
sono sistemi del tutto autonomi, dotati di un proprio
sistema operativo e di una propria interfaccia di controllo a cui si accede usando un web browser, come se
si trattasse di un sito web. Non richiedono quindi l’installazione di alcun driver sul PC, anzi non richiedono
neppure di essere connessi a un PC per funzionare.
Poiché chiunque si trovi nei dintorni potrebbe teoricamente accedere abusivamente all’access point ed
alterarne la configurazione, l’interfaccia di controllo
web prevede sempre una autenticazione aggiuntiva rispetto alla protezione crittografica. Pertanto prima di
poter accedere ai menu di configurazione del dispositivo è sempre necessario anche autenticarsi fornendo
login e password. Questi dovrebbero essere sempre
cambiati immediatamente al primo uso, in quanto i
valori predefiniti in fabbrica sono noti per ciascun
modello di access point ed eventuali hacker basati nei
paraggi potrebbero facilmente reperirli consultando
documentazione di prodotto scaricata da Internet.
Il modem
1.12.5.1 Conoscere i
modem analogici
1.12.5.2 Conoscere
gli adattatori ISDN
Il collegamento fra un sistema digitale come il PC
ed un sistema di trasmissione segnali basato su tecnologia analogica, come la normale rete telefonica o
la rete ADSL, richiede uno speciale adattatore che si
occupa
• di trasformare segnali digitali in segnali analogici, modulando in ampiezza, in frequenza o in fase
un’onda portante da immettere sul mezzo trasmissivo analogico;
• di reinterpretare le onde modulate ricevute dalla
rete analogica, estraendone l’informazione digitale.
Il primo processo si chiama “modulazione” e il secondo “demodulazione” e i dispositivi che si occupano di queste due trasformazioni, per contrazione da
“modulator-demodulator”, sono detti “modem”.
I modem analogici
Si fa uso di un vero e proprio modem quando il PC
deve comunicare sulla normale rete telefonica analogica (PSTN), perché il suo funzionamento è analogico: per poter essere trasportati, i bit del flusso di dati
digitale devono essere trasformati in segnali elettrici analogici equivalenti a quelli a cui avrebbero dato luogo dei particolari suoni in una chiamata voca-
PC Open 116 Novembre 2007
Lezione 8
le. Per questa situazio- 18
ne (la cosiddetta modalità d’accesso “dialup”, perché richiede di
comporre un numero
telefonico proprio come in una chiamata
vocale) i modem si sono evoluti fino a raggiungere
il livello massimo di prestazioni di 56 Kbit/secondo,
donde il nome di “modem 56K”.
Per lungo tempo i modem non rientravano nell’equipaggiamento di base dei personal computer, dal
momento che molti anni fa il collegamento a Internet
o a una LAN aziendale via rete telefonica era un’operazione complicata, precaria e a basse prestazioni che
interessava un’utenza altamente specialistica; pertanto all’epoca venivano venduti come accessori prima
esterni (collegati al PC via porta seriale RS-232-C) e
poi interni, da installare su bus ISA o PCI per i desktop
o su bus PCMCIA per i laptop.
Col tempo, però, l’accesso dial up a Internet è diventato talmente comune da non poter più essere
considerato un optional. Anzi spesso era un motivo
per l’acquisto del personal computer (figura 18). Così
il modem 56K è entrato a far parte della dotazione di
base dei PC: come scheda PCI preinstallata, nel caso
dei desktop; addirittura come circuiteria integrata su
motherboard, nel caso dei laptop.
Oggi i siti Internet e i requisiti di banda hanno reso
assolutamente inadeguate le prestazioni raggiungibili
con un modem 56K, per cui questa dotazione, seppure sempre presente nei PC contemporanei, è di fatto
obsoleta e ridondante e va considerata solo come una
soluzione di emergenza da “extrema ratio” per collegarsi a Internet quando non c’è proprio alternativa:
né rete cellulare, né ADSL, né HAG per fibra ottica, né
una rete Ethernet, né WiFi.
Gli adattatori ISDN
Sostanzialmente diverso è invece il caso delle connessioni alla rete effettuate mediante lo standard digitale ISDN (Integrated Services Digital Network). Questa tecnologia di rete si basa su un modello di funzionamento intrinsecamente digitale e l’interfaccia fra la
rete stessa e le apparecchiature che ne fanno uso, anch’esse digitali, non richiede alcun particolare adattamento analogico-digitale. Non a caso in questo caso particolare non si parla di modem, ma di Terminal
Adapter. Una rete ISDN consente di comunicare con
voce e dati sulla stessa rete in modalità digitale, un
po’ come avviene su Internet che può veicolare sia
dati sia voce (dopo digitalizzazione, magari VoIP). Se
il risultato è concettualmente simile, l’obiettivo iniziale era però profondamente diverso. Lo standard
ISDN nasce nell’arena dei produttori di sistemi e infrastrutture per reti telefoniche e aveva lo scopo di
superare i limiti della normale rete analogica PSTN
sostituendola con una rete dotata del supporto nativo
per la comunicazione dati; la tecnologia di rete Internet invece nasce fondamentalmente dal mondo della
microinformatica, in cui l’enfasi è tradizionalmente
stata quella dei dati, mentre solo in epoca recente si
è iniziato anche a sfruttare, con la tecnologia VoIP, il
potenziale del web come infrastruttura di comunicazione “telefonica”.
L’ISDN è anche uno standard relativamente vecchio
e in fase declinante; per motivi di scarso tempismo
e di costi di migrazione eccessivamente onerosi per
l’epoca ha sicuramente mancato l’obiettivo di creare
una rete telefonica digitale, ma in virtù delle sue discrete capacità trasmissive (il profilo Basic Access
consentiva 64+64 Kbps contro i 56Kbps messi a dispo-
Lezione 8
sizione da una connessione dial-up PSTN analogica)
ha vissuto una breve stagione di rinnovato interesse
come alternativa “veloce” per il collegamento alla rete; proprio per questo uso servivano i Terminal Adapter, generalmente implementati come schede PCI o
ISA da installare all’interno di un desktop, ma anche
come unità esterne seriali o, più recentemente, USB.
Dato l’avvento della ben più veloce tecnologia ADSL,
l’ISDN come sistema per l’accesso dati alla rete è ormai in declino; oggi di fatto sopravvive soltanto come
standard per la connessione digitale dei centralini telefonici alla rete di accesso.
I modem ADSL
Anche la tecnologia ADSL (Asymmetric Digital Subscriber Line) richiede dei dispositivi di interfaccia per
collegare il PC alla rete telefonica, i cosiddetti modem
ADSL. A differenza del caso dell’ISDN in cui questa
connessione è da considerarsi completamente digitale, un modem ADSL realizza una trasmissione dati
digitale su una linea che fondamentalmente rimane
analogica. Vi è però una importante differenza: il modem 56K su questa linea analogica scambia segnali
modulati che rientrano tutti nello spettro di frequenze usato per la fonia, mentre l’idea alla base dell’ADSL
è quella di utilizzare per la comunicazione dati quello che resta dello spettro disponibile, lasciando anzi
libera la porzione dedicata alla comunicazione voce.
Questa può quindi continuare a essere usata, purchè
un opportuno filtro separi le due bande silenziando i
disturbi che altrimenti si udirebbero durante la chiamata telefonica.
Tutto si basa sul fatto che la linea in rame che collega la presa dell’abbonato con la centrale telefonica è
un canale di comunicazione analogico con una banda
passante notevolmente più ampia di quanto basti per
la sola fonia. Anche se la banda passante dipende fortemente dalla qualità dei cavi e dalla loro lunghezza
(che dipende a sua volta dalla distanza geografica fra
l’abitazione e la centrale), non sono infrequenti situazioni in cui è disponibile una banda di 1 MHz e oltre.
Invece, nella centrale telefonica, l’elaborazione del segnale prendeva in considerazione esclusivamente i 4
KHz più bassi dello spettro, “sprecando” tutto il resto.
Poiché le alte frequenze non vengono sfruttate dal
servizio fonia, può servirsene l’ADSL per far passare
anche i flussi dati sullo stesso mezzo fisico già installato (il ben noto “doppino” in rame), senza bisogno di
installare nuovi cavi.
Nell’ADSL, per ragioni pratiche e per consentire
una efficace gestione del rumore escludendo le sole
frequenze troppo disturbate, si divide lo spettro delle
alte frequenze in un certo numero di sottobande. Dopo una valutazione (“probing” o “training”) delle varie
sottobande per valutarne il livello di rumore, alcune
saranno ignorate perché inutilizzabili, altre saranno
allocate al flusso in trasmissione verso la centrale
(upstream, o upload) e le restanti saranno usate per
il flusso verso il PC (downstream, o download).
Caratteristica tipica dell’ADSL è il fatto che in direzione downstream si utilizza 19
un numero di sottobande maggiore rispetto all’upstream, questo per
offrire una buona velocità operativa nello scenario d’uso più frequente che è quello della ricezione
IT administrator - Hardware
20
di dati (ricezione di pagine
web, download di file, ricezione di email con attachment,…). È da questa tipica
“asimmetria” dell’allocazione delle bande, sbilanciata
a favore del download, che
deriva la “A” dell’acronimo
ADSL. Esistono comunque
altre tecnologie della famiglia xDSL in cui l’allocazione
è esattamente simmetrica, in considerazione di finalità d’impiego differenti.
Anche se sui vari canali della linea viaggiano segnali modulati in modo analogico, la tecnologia usata nei
circuiti di gestione del segnale e la logica di controllo
della qualità dei canali si basano su sistemi digitali. In
particolare la circuiteria che si occupa della precisa
separazione dei canali, del filtraggio dei disturbi e della modulazione fa largo uso dei cosiddetti DSP (processori digitali di segnale: Digital Signal Processor), e
questo avviene sia lato utenza (nei modem ADSL) sia
in centrale, in cui appositi apparati detti DSLAM (DSL
Access Multiplexer, multiplatori d’accesso DSL) si occupano di raccogliere i flussi dati generati dall’utenza ADSL e di avviarli alla rete dati dell’ISP separandoli
concettualmente dal percorso dei circuiti usati dalla
rete fonia. È questa applicazione di tecnologie digitali
al trattamento di segnale ad aver reso possibile a costi ragionevoli la comunicazione dati ad alta velocità
su un mezzo trasmissivo “di fortuna” come il doppino
telefonico, donde la “D” nell’acronimo ADSL.
Nei modem ADSL (figura 19) esistono significative differenze riguardanti lo standard implementato.
Lo standard originario ITU G.992.1, noto anche come
G.DMT (Discrete Multitone Modulation), supportava 1
Mbps in upstream e 8 Mbps in downstream sfruttando estensivamente la banda disponibile sul doppino.
Purtroppo ciò portava a generare una certa quantità
di disturbi nella banda fonia, per cui l’installazione di
un filtro separatore (splitter) diventava praticamente
obbligatoria per non interferire troppo con l’audio
delle comunicazioni voce.
L’installazione di un filtro (figura 20) rappresenta
un costo aggiuntivo e soprattutto una complicazione, non richiesta per esempio per l’uso dei modem
56K, che costituiva un ostacolo a una diffusione di
massa di questo tipo di servizio. Si è quindi cercato
un compromesso che riducesse o eliminasse del tutto
la necessità di uno splitter. Lo standard G.Lite, grazie
a un utilizzo meno “invasivo” delle frequenze, riesce
nell’intento, a costo però di un calo di prestazioni dovuto al minor numero di sottobande sfruttabili per la
comunicazione DSL: il G.Lite infatti non supera i 512
Kbps in upload e gli 1.5 Mbps in download. Non a caso
il G.Lite, destinato a un’utenza con esigenze di banda
limitate e che non gradisce procedure d’installazione troppo complesse, è stato spesso proposto come
versione “base” del servizio ADSL, proponendolo alla
fascia bassa del mercato.
Più di recente hanno fatto la loro comparsa due
importanti evoluzioni della tecnologia ADSL che hanno aumentato notevolmente le prestazioni. Si tratta
dell’ADSL2 e dell’ADSL2+. Il primo migliora il sistema
di modulazione rendendolo più efficiente (tanto che
a parità di condizioni la banda downstream può arrivare a 12 Mbps) e migliorando le prestazioni anche
in caso di lunghe distanze fra abbonato e centrale telefonica, mentre il secondo raddoppia la porzione di
spettro di frequenze utilizzata portandola da 1.1 MHz
a 2.2 MHz. Grazie a queste innovazioni si può arrivare a ben 24 Mbps in download. Anche in questo caso
PC Open 117 Novembre 2007
Fig. 20 - Un filtro ADSL
per presa tripolare.
Non sempre i filtri sono
forniti in dotazione con
il modem: in tal caso
devono essere acquistati
a parte. I modem
ADSL G.Lite usano una
porzione di spettro meno
ampia ed in molti casi
possono fare a meno del
filtro, a differenza dei
normali modem ADSL e
soprattutto dei modelli
ADSL2/2+
1.12.5.3 Conoscere i
modem ADSL
Fig. 19 - Un modem ADSL
dalla curiosa forma “a
manta”. I modem ADSL
più recenti supportano
gli standard ADSL2 e
ADSL2+, grazie ai quali la
velocità può teoricamente
superare i 20 Mbps in
download. Il collegamento
con il PC può essere
via Ethernet o via USB.
I modelli integrati in un
access point possono
essere raggiunti anche
via WiFi
IT administrator - Hardware
i gestori ADSL hanno utilizzato denominazioni commerciali (“Super”, “Turbo” e così via) per identificare
i servizi basati su queste tecnologie.
I modem ADSL sono quasi sempre dotati di interfaccia USB o Ethernet; in qualche caso le due interfacce sono entrambe presenti. Spesso la funzionalità
di modem ADSL è direttamente integrata nell’access
point o nel router. Il principale svantaggio di questa
soluzione sta nel fatto che qualora la tecnologia subisca una evoluzione che richieda necessariamente
un aggiornamento hardware con sostituzione del modem (come è avvenuto con ADSL2/2+), l’investimento risulta piuttosto alto dato che l’unità da sostituire
comprende anche le funzioni di access point, router e
firewall. Meglio quindi preferire una soluzione a componenti separati, se possibile, o in alternativa avvalersi delle offerte di comodato d’uso gratuito per i
modem.
1.12.5.4 Sapere
dell'esistenza di
modem/adattatori
di rete locale che
utilizzano le linee
elettriche
Fig. 21 - Speciali
adattatori basati sulla
tecnologia Powerline (oggi
ribattezzata HomePlug)
sono in grado di veicolare
traffico di rete Ethernet
sulla rete elettrica
220V, con una riedizione
moderna della vecchia
tecnologia a “onde
convogliate”. Grazie al
sofisticato trattamento
del segnale operato dai
circuiti DSP, nonostante
i disturbi è possibile
raggiungere velocità di
tutto rispetto: 14, 85 o
anche 200 Mbps, senza
dover passare nuovi
cavi. Le prestazioni
effettive però variano
sensibilmente a seconda
delle caratteristiche della
rete elettrica
Modem/adattatori di rete locale che utilizzano
le linee elettriche
Così come l’ADSL, grazie alla tecnologia d’elaborazione digitale del segnale (DSP), ha inaspettatamente “spremuto” nuove prestazioni dal vecchio doppino telefonico già installato, un’altra notevole tecnologia è in grado di fare altrettanto con i cavi della rete
elettrica 220V di un’abitazione o ufficio. Nonostante
si tratti di cavi di qualità ancora più “vile” rispetto a
quella del cablaggio telefonico (quest’ultimo, seppure
non schermato, è un doppino accuratamente ritorto
per ridurre gli effetti di autointerferenza), anch’essi
presentano un interessante “potenziale nascosto” in
termini di banda sfruttabile ai fini della trasmissione
dati. Pertanto non si è perso tempo nello studiare dispositivi che, gestendo anche in questo caso con sofisticate tecniche DSP in tempo reale i forti disturbi di
linea fino a neutralizzarli o almeno tenerli sotto controllo, consentissero di usare la rete elettrica di casa
come una LAN.
Questo tipo di tecnologia è genericamente chiamata Powerline Communication (PLC), ma la denominazione commerciale dello standard che la implementa
in prodotti consumer è detta HomePlug (figura 21) . La
prima generazione di dispositivi (HomePlug 1.0) raggiungeva velocità di 14 Mbps, in teoria competitiva
con il WiFi 802.11b (11 Mbps); hanno fatto seguito una
seconda generazione (1.0 Turbo) capace di 85 Mbps
e, più recentemente, una nuova evoluzione (HomePlug AV) capace di 100-200 Mbps e quindi adatta anche alla distribuzione di segnali audio-video in streaming. Va tenuto conto che le prestazioni sono fortemente variabili in funzione della distanza fra le parti in
comunicazione, della qualità del cablaggio della rete
elettrica di casa, del tipo e numero di apparecchi collegati alla rete e delle interferenze da essi generate.
21
1.12.6.1 Sapere
dell'esistenza di
versioni interne (PCI,
integrate)
Lezione 8
Un altro problema in via di progressiva attenuazione
è stato, soprattutto all’inizio, la scarsa compatibilità
fra dispositivi Powerline di produttori diversi, o, più
precisamente, basati su chipset differenti.
Gli adattatori Powerline si presentano in genere come dei box simili ad alimentatori che si collegano alla presa di corrente e presentano una presa Ethernet.
Non richiedono l’installazione di alcun driver e sono
amministrabili da browser, con interfaccia tipo Web.
Uno degli aspetti a cui prestare attenzione è, come nel
caso delle reti WiFi, la protezione crittografica dei dati. Infatti chiunque si possa collegare a una presa di
corrente servita dallo stesso contatore potrà captare
i pacchetti che circolano su questa sorta di LAN. Per
questo le comunicazioni devono essere cifrate con
appositi algoritmi crittografici che richiedono l’impostazione di una password uguale su tutti i dispositivi della rete. Nei casi più semplici gli adattatori non
richiedono alcuna configurazione in quanto sono già
tutti impostati in fabbrica con una password di default, pertanto basta effettuare i collegamenti fisici
(presa 220V e cavi Ethernet) per iniziare immediatamente a lavorare.
Dal punto di vista della praticità e del basso costo d’installazione dell’infrastruttura, la tecnologia
Powerline è quindi competitiva con quella WiFi: nessun nuovo cavo da passare. Inoltre, a differenza del
WiFi, non esiste il concetto di access point e non servono nemmeno alimentatori, visto che l’energia necessaria al funzionamento degli adattatori PLC viene
tratta direttamente dalla presa a cui sono collegati.
Infine, il fatto che i dati possano viaggiare sullo stesso mezzo della corrente elettrica che alimenta i dispositivi di casa, fra cui impianto HiFi, elettrodomestici e
così via, è molto interessante in quanto consente di
integrare in una rete dati, senza nuovi cavi né antenne WiFi, qualsiasi dispositivo che sia connesso alla rete elettrica. Se questa impostazione dovesse prendere piede, in futuro gli elettrodomestici in vendita potrebbero integrare la economica circuiteria necessaria e diventare potenzialmente “intelligenti” e gestibili
da remoto: l’home automation potrebbe consentire
di azionare o controllare via Web, magari dall’ufficio,
condizionatori, caldaie, frigoriferi, lavatrici e così via;
oppure gli elettrodomestici stessi potrebbero collegarsi a Internet per rimpinguare automaticamente le
scorte di vettovaglie (è il caso dei mitici “frigoriferi
intelligenti”), ordinare materiali di consumo o richiedere interventi di manutenzione periodica.
Porte di connessione
Qualunque sia la tecnologia di comunicazione di
rete adottata, essa comporta sempre la necessità di
collegare fisicamente il PC alla rete, in modo diretto
o con la mediazione di un apposito adattatore o modem. Poiché sono presenti varie opzioni alternative,
si pone quasi sempre il problema di scegliere la forma
di collegamento più vantaggiosa o più adatta alle proprie esigenze. Le implicazioni di questa scelta non sono banali, sia in termini di costo sia per quanto riguarda la praticità e la riusabilità, come vedremo, per cui è
importante dedicarvi la dovuta attenzione.
Versioni interne (PCI, integrate)
In molti casi l’hardware necessario alla connessione del PC è installato direttamente al suo interno. Nel
caso dei desktop, a seconda delle scelte tecniche del
produttore, la circuiteria può essere addirittura integrata sulla motherboard oppure essere basata su
PC Open 118 Novembre 2007
Lezione 8
una scheda di espansione preinstallata in uno slot
PCI (per i desktop). Naturalmente è possibile aggiungere in un secondo tempo l’accessorio che occorre e
in questo caso l’unica possibilità per un’installazione
interna è quella della scheda su slot PCI.
Modem 56K, terminal adapter ISDN, schede di rete
Ethernet e WiFi sono tutti esempi di schede interne
PCI, preinstallate o “after market”, che possono trovare posto nel nostro PC. In genere la presa Ethernet
è sempre integrata su motherboard e in qualche modello recente ciò vale anche per il WiFi (che comunque richiede il collegamento di una antenna, meglio
se esterna, con apposito cavetto). Nel caso dei modem è invece prevalente la soluzione su PCI, anche
quando sono preinstallati in fabbrica.
I vantaggi degli adattatori interni si possono così
riassumere:
• Non occupano preziose porte esterne USB
• Non sporgono dal mobile del PC
• Rispetto a dispositivi esterni USB, in genere sono
meno soggetti a improvvisi bug del riconoscimento
Plug and Play
• Possono accedere al bus PCI, PCI-X o PCI Express,
quindi hanno a disposizione una banda molto maggiore rispetto ai dispositivi USB esterni e possono
quindi fornire prestazioni migliori
• Non hanno problemi relativi ai limiti massimi di assorbimento elettrico che affliggono le porte USB
(al massimo 500 mA per porta). Solo certe schede
grafiche ad alte prestazioni hanno bisogno di più
corrente di quanta ne possa essere fornita dal bus
PCI e richiedono un collegamento supplementare
interno diretto con l’alimentatore.
• Le loro prestazioni non degradano a causa del collegamento di un gran numero di altre periferiche
(come avviene invece collegando più dispositivi
USB a uno stesso hub)
Versioni esterne (seriali, USB, Bluetooth, PC-card)
L’alternativa all’installazione interna è quella di
acquistare adattatori che si collegano alle porte di
comunicazione esterne, come porte seriali e porte
USB, oppure via Bluetooth. Altri modelli, su misura
per i portatili, trovano posto nello slot d’espansione
PCMCIA (figura 22) o nel più moderno ExpressCard.
Questo tipo di soluzione si presta particolarmente bene all’installazione di espansioni “after market”,
aggiuntive rispetto alla dotazione di base della macchina. Fra i principali vantaggi dei dispositivi esterni
ricordiamo i seguenti:
• Sono generalmente più economici delle versioni su
scheda PCI
• La loro installazione non richiede di spegnere né
aprire la macchina ed è alla portata anche di personale poco qualificato
• Sono più facilmente reperibili sul mercato
• Sono riutilizzabili su PC diversi e in qualche caso
(per esempio nel caso Blue22
tooth, ma anche USB) anche
su sistemi diversi dai PC (es.
PDA, Mac)
• Rispetto a schede interne
è meno probabile che la loro
installazione possa provocare conflitti di risorse di sistema con altre periferiche
Telefonia mobile
Una importante forma di accesso a Internet è quel-
IT administrator - Hardware
la che fa uso della
23
rete cellulare. Questa soluzione è insostituibile quando le altre opzioni
non sono disponibili o non risultano
convenienti:
• ci si trova lontani da una presa
Ethernet, o non
si dispone dei
necessari cavi,
oppure il proprio
indirizzo non è autorizzato a fare uso di questa LAN
o a uscire su Internet
• ci si trova fuori dalla copertura di un hot spot WiFi,
oppure non si dispone dell’account per accedere
all’hot spot pur captandone il segnale
• ci si trova lontani da una presa telefonica analogica
PSTN oppure non si dispone dei necessari cavi di
collegamento
La rete cellulare è disponibile praticamente ovunque sul territorio (anche all’estero, seppure sovente
con restrizioni o complicazioni tariffarie), non richiede di portare con sé cavi (se non quello per collegarsi a un telefono cellulare, peraltro sostituibile con un
link Bluetooth) e assicura in ogni caso prestazioni sufficienti almeno per un livello di operatività minimo.
Purtroppo il costo del servizio non è sempre conveniente e soprattutto, in base alle politiche tariffarie
dei gestori, vengono fortemente sfavoriti gli utenti
“occasionali”, che si trovano a dover sostenere costi
notevolmente maggiori di quelli che pagano i sottoscrittori di un “data plan” forfettario.
Un altro svantaggio sta nel fatto che la configurazione di una connessione dial-up effettuata mediante
rete cellulare è un poco complicata in quanto spesso
alcune opzioni dipendono dalla marca e modello del
telefono cellulare utilizzato come modem.
Il collegamento a Internet via rete cellulare può avvenire
• utilizzando un cellulare come modem. In questo
caso il cellulare può essere collegato al PC o via
cavo o via Bluetooth; esiste anche la possibilità di
un collegamento a raggi infrarossi, ma si tratta di
una soluzione scomoda, precaria e con basse prestazioni; inoltre non tutti i PC e non tutti i cellulari
sono dotati di una porta IrDA, mentre quasi tutti i
cellulari, e alcuni PC dalla configurazione particolarmente completa, sono provvisti di Bluetooth.
• utilizzando una apposita scheda PCMCIA o ExpressCard. Si può pensare a questo scenario come a un
“telefonino inserito nel PC” (figura 23). In questo
caso occorre una SIM Card dedicata, con contratto dedicato, che dovrà essere inserita nella scheda. Ultimamente si sta diffondendo sul mercato la
soluzione di uno “scatolotto” esterno con le stesse
funzioni, che si collega al PC via USB. Spesso sono i
gestori stessi a offrire questi dispositivi in comodato d’uso, di solito in abbinamento con “data plan”
dedicato esclusivamente all’accesso dati e con una
tariffazione ad hoc.
Un aspetto importante dell’accesso a mezzo rete
cellulare è la questione delle prestazioni raggiungibili con questa forma di accesso. Vi sono forti variazioni a seconda della rete a cui si intende collegarsi, del
livello di servizio supportato nel luogo geografico in
cui ci si trova, del tipo di contratto stipulato e delle
capacità tecniche del terminale che si intende usare
per collegarsi. In altre parole, per collegarsi ad alta velocità (UMTS, HSDPA) occorre che valgano contempo-
PC Open 119 Novembre 2007
Fig. 23 - Una scheda
PCMCIA per collegarsi
a Internet via GPRS o
UMTS. Dal punto di vista
funzionale equivale a un
telefono cellulare usato
come modem per il
traffico dati e stabilmente
collegato al PC via cavo
o Bluetooth. Il vantaggio
della scheda interna
consiste soprattutto nella
maggiore praticità, senza
cavi né batterie
1.12.6.2 Sapere
dell'esistenza di
versioni esterne
(seriali, USB,
Bluetooth, PC-card).
Fig. 22 - Una scheda
Ethernet implementata
nel formato PCMCIA.
A causa del ridotto
spessore, il connettore
RJ45 è montato su un
cavetto. In altri modelli la
scheda PCMCIA ha una
protuberanza esterna che
contiene le porte LAN
IT administrator - Hardware
Fig. 24 - La rete cellulare
di terza generazione
(3G) adotta la tecnologia
UMTS per offrire
connettività a larga
banda in mobilità. I
cellulari UMTS possono
essere usati dai PC come
modem per l’accesso alla
rete. I modelli dotati di
Bluetooth non richiedono
neppure un cavo per
la connessione al PC
(purchè quest’ultimo
sia anch’esso dotato di
Bluetooth)
1.12.7.1 Sapere
dell'esistenza del
GSM/GPRS/EDGE/
UMTS
raneamente le seguenti condizioni:
• Ci si trova in un luogo servito dalla rete cellulare di un gestore che implementa la tecnologia 3G
(UMTS) o 3.5G (HSDPA).
• In quel luogo la rete supporta effettivamente la versione più recente della tecnologia cellulare (i gestori migrano la propria rete “per zone”, quindi è
possibile che per un certo lasso di tempo anche
un gestore impegnato a propagandare il servizio 3G
abbia ancora ampie sezioni della propria rete che
sono ancora basate sugli standard 2G o 2.5G)
• Si è clienti di quel gestore, oppure si è clienti di un
altro gestore che con esso ha sottoscritto un accordo di roaming che “copre” anche il servizio di
accesso dati
• Il cellulare, o comunque il terminale usato per connettersi, supporta la tecnologia 3G o 3.5G;
• Il collegamento fra cellulare e PC è sufficientemente veloce da non comportarsi da “collo di bottiglia”
vanificando le prestazioni possibili sulla tratta radio
• L’intensità di segnale è sufficientemente alta perché
la connessione rimanga stabile e il terminale non
decida di procedere al fallback
Come si vede, il successo in questo tipo di connessioni dipende da una moltitudine di fattori e in molte
situazioni rappresenta ancor oggi qualcosa di fortunoso. Tuttavia è anche una preziosissima “ancora di
salvezza” ed è quindi importante conoscerne le potenzialità.
Vediamo quindi brevemente in rassegna le evoluzioni degli standard di telefonia mobile.
GSM/GPRS/EDGE/UMTS
Le tecnologie che si sono succedute nel campo della comunicazione dati via rete cellulare hanno fatto registrare un continuo aumento di prestazioni e spesso
hanno costituito esse stesse la principale novità del
nuovo step evolutivo della rete, dato che il servizio
voce è stato garantito fin dai tempi della telefonia cellulare analogica E-TACS.
Il primo tentativo di rendere disponibile un accesso dati alla rete cellulare si è avuto con l’avvento del
GSM, la cosiddetta rete di seconda generazione (2G),
che però consentiva connessioni alla misera velocità di 9.6 Kbps: troppo poco per qualunque utilizzo
pratico, senza contare che la tariffazione avveniva
a tempo, indipendentemente dal traffico, in quanto
la connessione era realizzata su un normale circuito per fonia che veniva riservato per tutta la durata
della comunicazione, occupando inutilmente risorse
di rete anche nelle fasi in cui non vi era alcuno scambio di dati.
Per questi svantaggi il GSM “puro” è stato accantonato come soluzione per la comunicazione dati mobile e fu affiancato dal più efficiente GPRS (General Packet Radio Service), il primo vero e proprio standard
dati specifico per la comunicazione radiomobile, basato su una tecnica a pacchetto anziché a circuito: in
sostanza, durante la comunicazione non viene tenuto costantemente impegnato un canale, ma lo si usa
soltanto quando vi è effettiva necessità di scambiare
dati. Il GPRS è stato spesso considerato una tecnologia di “seconda generazione.. e mezza”, ossia 2.5G, in
attesa dell’avvento della telefonia cellulare di terza
generazione.
Il GPRS incrementa le prestazioni dati aggregando
la banda di più canali elementari, detti “slot”, su ognuno dei quali possono generalmente viaggiare 9.6 Kbps
(salvo perfezionamenti successivi della tecnologia radio sottostante). Maggiore il numero di slot aggregabili, maggiore la banda di picco raggiungibile. Molto fre-
PC Open 120 Novembre 2007
Lezione 8
quente era la scelta di pun- 24
tare più sul download che
sull’upload, in questo modo un dispositivo GPRS è in
grado di aggregare un numero di slot downlink maggiore rispetto all’uplink.
Una apposita classificazione fa rientrare i terminali in
diverse multislot class a seconda del numero di canali
gestibili e aggregabili nelle
due direzioni. I più perfezionati dispositivi GPRS basati
su tecnologia GSM pura potevano raggiungere al massimo velocità operative di
circa 60-80 Kbps, competitive con quelle di un modem 56K ma non certo con
quelle di una connessione ADSL.
Per avere prestazioni migliori si dovette attendere
l’arrivo della telefonia UMTS, detta “di terza generazione” (3G). (figura 24)
In attesa del suo avvento, un primo significativo
miglioramento di prestazioni è stato offerto dalla tecnologia EDGE (Enhanced Data rate for GSM Evolution),
a volte scherzosamente considerata una tecnologia
“2.75G”. Questa, senza costose modifiche all’infrastruttura di rete GSM esistente, anzi spesso con un
semplice aggiornamento del software delle “base station”, aumenta le prestazioni GPRS, nel migliore dei
casi, fino a circa 200 kbps (poco meno di 20 Kbyte/s),
ossia più o meno il triplo di quanto possibile con il
GPRS standard. Purtroppo, a differenza della rete che
non ha generalmente richiesto grossi investimenti per
l’upgrade, per fruire di queste prestazioni i terminali
devono essere sostituiti con nuovi modelli capaci di
supportare il nuovo standard.
L’UMTS ha consentito un ulteriore salto qualitativo,
rendendo teoricamente possibili, in condizioni radio
ideali e con celle poco affollate, velocità in download
di 2 Mbps (circa 200 kbyte/s). In che misura le prestazioni in condizioni reali si mantengano prossime a
questi valori dipende in gran parte dalle politiche di
progettazione della rete applicate dall’operatore (dimensione delle celle e distribuzione geografica delle
“base station”), ma in presenza di forte segnale 3G è
esperienza piuttosto comune riuscire a collegarsi a
300-400 Kbps.
Si tratta di valori non dissimili da quelli offerti da
una connessione ADSL “entry level”. Dal punto di vista degli utenti finali lo scenario dell’EDGE si è ripetuto: è stato necessario sostituire nuovamente i terminali con nuovi modelli.
Le più recenti evoluzioni dell’UMTS si chiamano
HSDPA e HSUPA (High Speed Download/Upload Packet
Access) e hanno l’obiettivo di migliorare sensibilmente la velocità in download e quella in upload, rispettivamente fino a 14,4 Mbps e fino a 5,76 Mbps. I valori
realmente raggiungibili dipenderanno, come sempre,
dalle scelte tecniche e commerciali dei gestori; per
esempio, nel caso dell’HSDPA, è comune la scelta di
porre un limite di “soli” 3,6 Mbps. In ogni caso, terminali da sostituire anche questa volta.
Concludiamo ricordando che la “famiglia” HSxPA è
spesso considerata una tecnologia di “terza generazione... e mezza” (3.5G), una sorta di soluzione ponte fra gli attuali telefoni e reti UMTS di 3G e le future
reti 4G che promettono ovviamente di essere ancora
più veloci delle reti attuali, probabilmente sfruttando
WiFi e WiMAX accanto alle altre tecnologie radio già
installate in rete.
Lezione 9
Materiale didattico
progettato per EUCIP
IT Administrator
segnalato da AICA
Modulo 1 - Hardware
IT administrator - Hardware
A scuola con PC Open
Alimentatori e installazione
nuovo hardware
PDF DEL CORSO
“AICA, Licenziataria
esclusiva in Italia
del programma
EUCIP (European
Certification
of Informatics
Professionals)
riconosce che il
materiale didattico
segnalato è
strutturato in
modo coerente con
l’organizzazione dei
contenuti prevista
dai documenti
EUCIP di riferimento.
Di conseguenza
AICA autorizza sul
presente materiale
didattico l’uso
dei marchi EUCIP
(registrato dal CEPIS
Concil of European
Professional
Informatics
Societies) ed AICA
protetti dalle leggi
vigenti.”
1.13 Alimentatori
1.13.1 Tipi e
funzionamento
1.13.1.1
Comprendere
l’accezione dei
termini: Volt, Ampere,
Ohm, Watt, corrente
alternata e corrente
continua.
Fig. 1 - L’alimentatore, o
Power Supply Unit (PSU),
si occupa di adattare la
corrente elettrica di rete
alle necessità delle varie
componenti hardware
del PC. Il suo formato
dipende strettamente da
quello del case: per un
case ATX, per esempio, si
usa una PSU ATX
Fig. 2 - La misura delle
grandezze fisiche che
caratterizzano la corrente
elettrica, come tensione
e corrente, può essere
effettuata utilizzando un
economico multimetro
digitale (o “tester”)
NEL DVD
Approfondimento sul componente spesso sottovalutato
ma che riveste un ruolo chiave per la stabilità del
computer. Nella seconda parte analizziamo gli elementi
da tenere in considerazione nell’assemblaggio di Marco Mussini
essun PC può funzionare senza che gli venga fornita la necessaria energia. Di questa incombenza
solo apparentemente banale si occupa l’alimentatore, o Power Supply Unit (PSU) (figura 1). Si tratta di
un componente troppo spesso trascurato da chi sceglie o assembla un PC, nell’errata quanto diffusa convinzione che gli alimentatori, purché siano adatti alla
tensione di rete (220V), dispongano delle connessioni
standard e abbiano ingombri e struttura compatibili
con gli spazi disponibili nella sede di montaggio del
case, in sostanza si equivalgano tutti.
Sicuramente la tensione di lavoro, le connessioni, gli ingombri e la posizione dei punti di fissaggio
sono aspetti cruciali ai fini dell’installazione, e tutto
sommato sono anche aspetti facili da verificare, ma
c’è dell’altro prima di poter concludere che un PSU è
adatta a un PC.
Come vedremo, questioni “secondarie” come i parametri elettrici di funzionamento non possono assolutamente essere trascurate e da esse possono dipendere il corretto funzionamento del sistema e la
sua stessa longevità. Quest’ultima dipende anche dalle caratteristiche del sistema di raffreddamento, che
determina anche la sua silenziosità, un aspetto quest’ultimo non trascurabile, sia pur per motivi diversi,
tanto nei sistemi destinati all’uso come Media Center
in salotto quanto nei desktop aziendali.
Alcune PSU più sofisticate sono anche in grado di
annullare brevi sbalzi di tensione per evitare danni
alla macchina o addirittura possiedono la capacità di
resistere a blackout più o meno lunghi, assicurando
N
Calendario delle lezioni
Lez. 1: la scheda madre e il BIOS
Lez. 2: i processori
Lez. 3: la RAM
Lez. 4: bus e risorse di sistema
Lez. 5: interfacce (prima parte)
Lez. 5: interfacce (seconda parte)
Lez. 6: memorie di massa
Lez. 7: i monitor, le schede grafiche
e le stampanti
Lez. 8: hardware di rete
Lez. 9: alimentatori e installazione nuovo
hardware
Lez. 10: risoluzione dei problemi
PC Open 109 Dicembre 2007
In collaborazione con:
1
la prosecuzione di un regolare funzionamento o per
qualche minuto (giusto il tempo sufficiente a salvare
i dati e spegnere ordinatamente la macchina), o addirittura per periodi più prolungati, fino al termine del
blackout. Queste caratteristiche sono importanti non
tanto per evitare guasti alla macchina, quanto per la
protezione dei dati e per assicurare una adeguata disponibilità del servizio.
Tipi e funzionamento
Ogni tipo di alimentatore assolve al suo incarico
di fornire energia al PC e ai suoi componenti hardware eseguendo un compito fondamentalmente semplice: trasformare la corrente elettrica di rete in forme
più adatte alle esigenze di funzionamento di motherboard, CPU, RAM, dischi, schede video, periferiche e
così via. Ciò che rende complessa questa attività sono
i requisiti elettrici, in continua crescita, sempre più diversificati e soggetti a tolleranze strettissime, dovuti
alle diverse necessità delle parti da alimentare.
Volt, Ampere, Ohm, Watt,
corrente alternata
e corrente continua
Ma quali grandezze caratterizzano e misurano la fornitura di
energia elettrica alle varie parti
del PC da parte dell’alimentatore? (figura 2)
Due sono i parametri fondamentali che descrivono lo scam-
2
IT administrator - Hardware
bio energetico fra PSU e ciascun utilizzatore sotto forma di circolazione di corrente in un circuito: si tratta
della tensione, o “differenza di potenziale” (misurata in volt, V) e dell’intensità di corrente (misurata in
Ampère).
Per chiarire il senso di queste due grandezze, la fenomenologia della circolazione di corrente fra i due
dispositivi può essere assimilata al flusso d’acqua in
un fiume in corrispondenza di una cascata. Con riferimento a questa similitudine,
• le molecole d’acqua corrispondono a elettroni;
• la corrente dell’acqua, ossia la quantità d’acqua che
transita in un secondo da una data sezione del fiume, corrisponde alla corrente elettrica;
• Il salto della cascata corrisponde alla differenza di
potenziale;
• Il tratto di fiume a monte della cascata, da cui arriva il flusso d’acqua, corrisponde PSU, che eroga
energia;
• Il tratto a valle, che riceve l’acqua, corrisponde al
dispositivo da alimentare, che riceve (e consuma)
energia.
• Il “ciclo dell’acqua”, che attraverso evaporazione
marina e piogge “chiude il circuito”, sostenendo
grazie all’energia solare il ripetersi del fenomeno
per un tempo indefinito e sempre con la stessa acqua, corrisponde al “circuito chiuso” (elettrico) in
cui idealmente circolano sempre le stesse cariche
elettriche, messe in movimento dalla tensione imposta dall’alimentatore.
È intuitivo riconoscere che al fenomeno del transito d’acqua dalla cascata, con caduta da una certa
altezza, è associata una energia proporzionale sia all’altezza del salto della cascata sia alla quantità d’acqua interessata. Poiché il fenomeno avviene in modo
continuo, più che l’energia associata al singolo atto di
caduta interessa il “flusso di energia”, o l’energia che
transita ad ogni secondo. L’energia rapportata al tempo impiegato per produrla, scambiarla o consumarla
è detta Potenza.
L’importanza del fattore tempo
Fig. 3 - Un raddrizzatore
è un circuito che
trasforma corrente
alternata bipolare in
corrente unipolare,
approssimativamente
continua (ancora
oscillante, ma che
circola sempre nello
stesso verso). Una tipica
implementazione si basa
sul cosiddetto “ponte
a quattro diodi”: grazie
alla proprietà dei diodi di
condurre solo in un’unica
direzione, disponendoli
appositamente è
possibile ottenere in
uscita una corrente
monodirezionale in cui
le semionde negative
vengono “ribaltate” e
trasformate anch’esse
in positive. L’oscillazione
ancora presente si
attenua poi, per esempio,
con una rete basata su
un condensatore e un
induttore (rete LC)
L’utilizzo del fattore tempo quale riferimento è di
cruciale interesse per valutare i fenomeni: nel caso di
un PC, per esempio, non interessa tanto sapere che il
PC, pur di dargli un tempo sufficientemente lungo, sarebbe in grado di eseguire miliardi di istruzioni; quello che interessa, per conoscere la sua potenza di calcolo, è sapere quante istruzioni è in grado di eseguire entro un tempo di riferimento (di solito un secondo). Analogamente, per avere un’idea della “voracità”
energetica della macchina, non interessa tanto sapere
quanta energia il PC consumerà complessivamente –
e quindi, quanta il PSU dovrà erogarne – in tutto l’arco della sua “carriera”, ma piuttosto quanta energia
viene richiesta in ogni secondo di funzionamento: in
altri termini, qual è la potenza assorbita.
Ritornando al nostro parallelo osserviamo che
se presso la cascata venisse installata una centrale
idroelettrica, la quantità di energia che potrebbe essere recuperata ogni secondo risulterebbe proporzionale al prodotto fra salto e portata. Anche in ambito elettrico questa grandezza, detta Potenza, riveste
particolare importanza, in quanto fornisce una misura dell’intensità dello scambio energetico in corso fra
PSU e utlizzatore; la potenza si misura in Watt (W) e
in base a quanto fin qui visto è data dal prodotto fra
tensione (V) e intensità di corrente (A). Per esempio,
se l’alimentatore eroga una corrente continua di 1 A in
presenza di una differenza di potenziale costante di 5
V, la potenza erogata sarà pari a 1 x 5 = 5 W.
Finora abbiamo supposto che la circolazione del-
PC Open 110 Dicembre 2007
Lezione 9
l’acqua e quella della corrente avvengano in totale libertà, senza essere frenate da alcun fenomeno antagonista. In realtà questo è falso in entrambe le situazioni. L’acqua scorre più o meno liberamente a seconda di fattori quali l’ampiezza geometrica del canale, la
ruvidezza delle superfici con le quali viene a contatto
e la presenza di eventuali ostacoli incontrati lungo il
cammino. Analogamente, la corrente elettrica scorre
più o meno liberamente a seconda delle caratteristiche fisiche intrinseche del materiale conduttore, della sezione dei cavi e della lunghezza del circuito che
essa deve percorrere. Nel caso limite, un interruttore
aperto oppone resistenza infinita al passaggio di corrente e questa, di conseguenza, si arresta.
Il grado di opposizione alla circolazione di corrente da parte di un cavo conduttore o, più in generale,
di un tratto di circuito è detto Resistenza e si misura
in Ohm (il cui simbolo è la lettera greca Omega maiuscola). Una relazione, detta Legge di Ohm, conferma
il legame intuitivamente esistente fra i valori di corrente, tensione e resistenza: per indurre e sostenere
una corrente di una determinata intensità, maggiore
è la resistenza opposta dal circuito alla circolazione
di corrente, maggiore dovrà essere la tensione. Vi sono quindi due cause possibili di salto di tensione: una
effettivamente associata all’impiego dell’energia per
compiere un qualche lavoro utile e l’altra legata alle
perdite (dissipazioni) causate dalla resistenza dei cablaggi del circuito. L’energia elettrica persa viene dissipata sotto forma di calore che deve essere asportato con una velocità equivalente a quella con cui viene
prodotto, altrimenti il suo accumulo nella sede in cui
è generato (la CPU, i cavi, le memorie…) ne provocherà il progressivo riscaldamento, fino al punto di deteriorare in modo irreversibile i circuiti causando un
vero e proprio guasto. Il concetto di potenza elettrica
consumata dal dispositivo serve quindi per dimensionare il sistema di raffreddamento, che deve asportare una potenza termica equivalente. Lo stesso dato
serve anche, all’estremo opposto, per dimensionare
l’alimentatore, che deve poter erogare almeno una potenza pari a quella richiesta dal PC nel suo complesso
in condizioni di carico massimo.
Differenza tra corrente continua e alternata
Da ultimo accenniamo alla differenza esistente fra
corrente continua e corrente alternata. Negli esempi
fin qui visti si è fatto riferimento a una circolazione di
corrente in regime stazionario, sempre nello stesso
verso e con intensità costante. Si tratta della cosiddetta corrente continua ed è la modalità di erogazione con cui l’alimentatore deve fornire la necessaria
energia ai vari componenti del PC. Questa modalità
operativa non è però quella adottata dalla rete elettrica domestica a 220V, in cui, allo scopo di ottenere
determinati vantaggi tecnici, la tensione in realtà non
è costantemente uguale a questo valore, ma oscilla
gradualmente fra valori negativi e positivi, invertendosi regolarmente 50 volte al secondo con un andamento oscillatorio a onda sinusoidale (si parla di “frequenza di 50 Hertz”, o 50 Hz). Conseguentemente la
corrente indotta nel circuito da questa tensione ondivaga risulta anch’essa avere un andamento oscillatorio, seguendo, eventualmente
con un certo ritardo stabile detto 3
sfasamento, lo stimolo impresso
dalla tensione: si parla quindi di
corrente alternata. In queste condizioni, oltre alla resistenza dissipativa opposta alla circolazione di corrente qualunque sia la
direzione, il circuito si caratteriz-
Lezione 9
4
za anche per l’inerzia con cui riesce a
reagire al richiamo
di una tensione che
cambia valore o addirittura si inverte,
adeguando intensità e verso della corrente. La grandezza
che descrive complessivamente la
reazione della cor5
rente nel circuito a
fronte di una tensione eventualmente
variabile è detta Impedenza e si misura
ancora in Ohm.
Poiché la corrente in ingresso all’alimentatore è alternata, mentre all’interno del PC tutti i componenti richiedono di essere alimentati a corrente continua,
un compito fondamentale dell’alimentatore è quello
di “raddrizzare” la corrente in entrata (figura 3). Un
secondo compito è quello di ridurre la tensione dai
220V medi in entrata ai valori richiesti, che sono dell’ordine dei 5-12V al massimo. Il tutto deve essere fatto in modo tale da assicurare la potenza necessaria
per ciascun componente collegato. Poiché le tensioni
in gioco sono basse, per fornire elevate potenze è necessario erogare alte correnti (una CPU può richiedere anche 100 W su tensioni dell’ordine di appena 1V,
una scheda grafica di fascia alta può richiedere anche
150W o più). Con correnti così elevate, per evitare di
opporre troppa resistenza e dissipare gran parte dell’energia i cavi fra alimentatore e componenti devono avere complessivamente una sezione abbondante;
in alternativa, per non dover installare cavi di sezioni diverse a seconda della corrente assorbita, a volte una tratta particolarmente “esigente” è servita da
due o più cavi di piccola sezione. Non a caso, sebbene le tensioni erogate siano tre (3.3, 5 e 12 V), come
vedremo, dall’alimentatore esce sempre, fra gli altri,
un nutrito fascio di 20 cavi che va a impegnarsi nel
connettore di alimentazione principale della motherboard (figura 4). Qui un ulteriore circuito, detto VRM
(Voltage Regulator Module) effettua la regolazione fine di tensione necessaria per soddisfare con elevata
stabilità i rigidissimi parametri di funzionamento delle CPU (figura 5). Un Core 2 Duo, per esempio, va alimentato a tensioni comprese fra 0.850V e 1.3525V, e
la variazione micrometrica fra questi due estremi va
eseguita al suo comando, in brevissimo tempo e con
assoluta precisione.
6
IT administrator - Hardware
Tipologie di alimentatore e i principi
di funzionamento per i diversi sistemi
Dal punto di vista circuitale gli alimentatori possono essere basati su diverse possibili soluzioni. Gli alimentatori più semplici si basano sul seguente schema classico:
• un trasformatore, usato per ridurre la tensione alternata in ingresso a valori compatibili con quelli
richiesti dal carico;
• un raddrizzatore, usato per convertire la bassa tensione alternata in bassa tensione continua;
• un regolatore di tensione dissipativo.
In questo schema, la possibilità di fornire in uscita
tensioni regolabili è fornita dal fatto che il regolatore
di tensione si comporta come una resistenza variabile; se a valle del raddrizzatore sono erogati 12 V ma
all’alimentatore si richiede di fornirne 5, il regolatore
dovrà occuparsi di opporre esattamente la resistenza necessaria per produrre una caduta di tensione di
12-5=7 V. A seconda della corrente erogata, questo si
tradurrà nella dissipazione, da parte del regolatore,
di una potenza elettrica più o meno grande, e quindi di una dissipazione termica di entità equivalente.
In altre parole questo semplice schema produce internamente corrente continua alla massima tensione
teoricamente erogabile, per poi “sprecarne” quanto
basta per ridurre la tensione ai valori richiesti; a seconda delle situazioni, è del tutto normale che l’energia dissipata dal regolatore possa essere anche maggiore dell’energia utile effettivamente erogata verso il
carico. Proprio a causa di questo “spreco” fisiologico
per il funzionamento, un rendimento basso e una notevole dissipazione termica sono quindi caratteristiche intrinseche delle PSU di questo tipo.
Una soluzione circuitale più complessa ma anche
molto più efficiente è quella dei cosiddetti alimentatori switching. In questo caso si fa in modo di ricavare, dalla tensione alternata in ingresso, un treno di
impulsi di tensione emessi con particolare precisione sia dal punto di vista della frequenza, sia da quello
dell’ampiezza, sia da quello della durata. Per esempio:
100 impulsi al secondo (100 Hz), di durata 5 millisecondi ciascuno, durante i quali la tensione (tensione
di picco) vale 10 V, intervallati da periodi anch’essi di
5 millisecondi con tensione pari a 0 V. Poiché a 100 Hz
il periodo è di 10 millisecondi, una durata degli impulsi di 5 millisecondi implica che la tensione di picco è
presente per il 50% del tempo: questa proporzione è
detta duty cycle.
Alimentando una semplice rete di stabilizzazione
con questo treno d’impulsi, si può fare in modo che
in uscita il treno d’impulsi risulti “spalmato” nel tempo e si presenti, in prima approssimazione, come una
corrente continua di valore pari al
prodotto fra la tensione di picco e
la frazione dell’unità data dal duty
cycle. Con riferimento all’esempio,
i casi limite sono:
7
•
8
1.13.1.2 Conoscere
le tipologie di
alimentatore
e i principi di
funzionamento per
i diversi sistemi,
le diverse tensioni
delle linee d'uscita
sui relativi cavi di
connessione
Fig. 4 - Dall’alimentatore
esce, fra gli altri, un
fascio di cavi a 20
conduttori che si impegna
in un apposito connettore
situato sulla motherboard
Fig. 5 - Il Voltage
Regulator Module si
occupa di effettuare
una regolazione fine di
tensioni e correnti per
l’alimentazione della
CPU, per la quale le
normali tensioni di 3.3, 5
e 12V non sono idonee.
È riconoscibile per il
fatto di essere costituito
principalmente da
condensatori e induttori
ed è generalmente
situato nelle immediate
vicinanze della CPU
Fig. 6 - Un alimentatore
ATX full size, senza
connettore passante
per l’alimentazione del
monitor (è il caso più
comune)
Fig. 7 - Gli alimentatori
mini-ATX hanno
dimensioni leggermente
inferiori, per l’uso in PC
più piccoli, ma restano
compatibili con i case ATX
e i relativi attacchi
Fig. 8 - Alcuni
alimentatori hanno un
cablaggio modulare
PC Open 111 Dicembre 2007
IT administrator - Hardware
duty cycle=100%: gli impulsi si susseguono senza
interruzioni ed equivalgono di fatto a un unico impulso costante pari alla tensione di picco di 10 V; la
tensione in uscita è quindi di 10 V costanti.
• Duty cycle=0%: gli impulsi hanno durata nulla: la
tensione in ingresso allo stabilizzatore è quindi costantemente di 0 V, e anche la tensione in uscita sarà ovviamente di 0 V.
Variando opportunamente la frazione del duty
cycle fra 0% e 100% (ossia, in ultima analisi, la durata
di ciascun impulso) è possibile ottenere in uscita qualunque valore di tensione fra 0 V e 10 V. Per esempio,
con una frazione del 50% la tensione media stabile in
Lezione 9
uscita sarà pari (nell’esempio) a 5 V, ossia alla metà
della tensione di picco degli impulsi.
Il controllo fine della durata del duty cycle, anche
in funzione della caduta di tensione osservata sul carico, è attuato da un circuito di controllo che comanda
un interruttore in modo tale da ottenere un treno di
impulsi con le caratteristiche necessarie per ottenere
stabilmente in uscita la tensione voluta.
Grazie alla sua superiore efficienza energetica, alle
ridotte dimensioni e alla flessibilità che permette di
ottenere le tensioni necessarie con grande precisione
e stabilità, eliminando fra l’altro la necessità di surdimensionare eccessivamente il trasformatore e il siste-
La gamma degli alimentatori Enermax
La gamma degli alimentatori di Enermax, tra le società più conosciute nel campo degli alimentatori per PC, si
divide in quattro famiglie: FMAII, Galaxy, Infiniti, Liberty.
Tutti gli alimentatori con potenza superiore a 450 W, sono disponibili nel formato DXX, ciò significa che hanno un
connettore PCI Express a 8 pin, indispensabile per alimentare le nuove schede video in formato PCI Express 2.0.
Infiniti e Liberty sono le due famiglie a cablaggio modulare, questo significa che si possono collegare
all’alimentatore solo i cavi necessari ai componenti interni, razionalizzando così gli ingombri interni e la pulizia del
cablaggio. Galaxy è l’ammiraglia del gruppo con potenze fino a 1.000 Watt.
Tabella alimentatori
Famiglia
Sigla identificativa
Numero di modelli
Potenza
Efficienza
MTBF
Sistema di
raffreddamento
Cablaggio
Protezioni
Garanzia
FMAII
Liberty
Infiniti
Galaxy
EG
ELT
EIN
EGX
3
3
2
2
370, 475, 565 W
400, 500, 620 W
650, 720 W
850, 1.000 W
80%
80%
82-85%
85%
Più di 100.000
Più di 100.000
Più di 100.000 ore al
Più di 100.000 ore al
ore al 70%; 25°C
70%; 25°C temperatura ore al 70%; 25°C
70%;
temperatura ambiente temperatura ambiente
ambiente
1 ventola da 8 cm; 1
1 ventola da 8 cm; 1
1 ventola 13,5 cm 1 ventola da 13,5 cm
ventola da 13,5 cm
ventola da 9 cm
Nativi: 24pin scheda,
CPU +12V 8 pin, CPU
+12V 4+4 pin, FM
Nativi: Mainboard
Nativi: 24pin scheda, (monitoraggio ventola da
Mainboard 20/24pin, 20/24 pin, 4+4 pin
6+2Pin Pci-Express, 80 cm), 2 Pci Express 8
CPU, FM
Processor 4/8pin,1XPCI
4+4 CPU 12V, FM Pin (scomponibili in 6+2
Modulari: 2 x Pci
EXPRESS 6+2Pin
Modulari: 3xSATA, pin), 1 con 3 SATA, 1 con
DXX*,1X PCI EXPRESS Express, 2 x 4pin
3 x Molex 4 pin.
3x4pin Molex, 2xPci6 Pin, 3X4pin MOLEX, Molex+2 x SATA, 2
Express, 4 pin MOLEX Modulari: 3 x SATA,
3XSATA, 2X4pin SATA x 4pin Molex + 2 x
to 2FDD,ed opzionale 3 x 4Pin Molex , 2 x
(Eternity Connector),FM SATA+FDD), 1 x da
4pin Molex + Fdd), 2
(RAM Power Cable)
2X6 a 1X8 pin)
x Pci Express (6 Pin) ,
1 modulare 2x2 +12V
(RAM Power Cable)
OPC,OLP, SCP,
OPC,OLP, SCP,
OPC,OLP, SCP,
OPC,OLP, SCP,
OVP, UVP, OTP
OVP, UVP, OTP
OVP, UVP, OTP
OVP, UVP, OTP
36 mesi
36 mesi
36 mesi
36 mesi
Il cablaggio modulare e la certificazione DXX sono
due peculliarità di alcuni modelli presenti nella
gamma di alimentatori Enermax
PC Open 112 Dicembre 2007
Lezione 9
IT administrator - Hardware
Dimensioni dei principali formati standard di alimentatore per PC
Tipo
Dimensioni (pollici)
ATX
6 x 3.5 x 5.5
(circa 150x85x140 mm)
MiniATX
MicroATX
Sistema
Note
di fissaggio
Attualmente il tipo più diffuso, particolarmente facile da reperire
4 viti
e offerto a prezzi più convenienti. Disponibile nella più ampia scelta
di potenze
5 x 3.5 x 5
(circa 125x85x125 mm)
5x3x4
(circa 125x75x100 mm)
4 viti
Utilizzabile anche in un case ATX
3 viti
Incompatibile con sedi ATX e miniATX. Scarsa varietà di modelli
ma di raffreddamento (con conseguente vantaggio
di costo) lo schema switching è oggi universalmente
adottato negli alimentatori per PC. Il principale svantaggio è la maggiore complessità circuitale. Dal punto
di vista meccanico e geometrico la scelta dell’alimentatore è relativamente semplice. Nel mondo PC infatti
gli alimentatori che trovano posto all’interno del case
hanno dimensioni e attacchi standardizzati. I fattori di
forma standard oggi dominanti sul mercato dei case
sono l’ATX, il mini-ATX e il micro-ATX. Ad ognuno di
questi corrisponde un formato della PSU alloggiabile
nell’apposita sede (v. tabella qui sopra) (figure 6, 7).
Resta ovviamente possibile che altri tipi di case, in
particolare quelli a profilo ultrasottile o quelli delle
più disparate forme per utilizzo come Media Center,
impieghino alimentatori di formato non standard.
10
Fig. 11 - L’estensione
a 24 pin può essere
ottenuta o con un
connettore monoblocco
da 24 contatti o
affiancando un elemento
da 4 pin al
connettore
base
11
1.13.1.3 Sapere
identificare i diversi
cavi d’uscita alle
rispettive periferiche,
i nomi, la forma dei
connettori
12
Fig. 12
- Il connettore
usato per
alimentare
le unità di
memoria di
massa IDE
P-ATA 3.5”
e le unità
ottiche IDE
P-ATA 5.25”
è il Molex a 4
pin lineari
Cavi d’uscita e rispettive periferiche
Come già accennato, dall’alimentatore esce un nutrito fascio di cavi destinati ai vari componenti interni del PC. Per evitare errori di identificazione, naturalmente, i connettori sono differenziati. Inoltre la loro
forma è tale da scongiurare il rischio di inserirli rovesciati, con conseguenze potenzialmente catastrofiche
per i circuiti alimentati e per lo stesso PSU.
I cavi sempre presenti sono:
• Connettore di alimentazione principale per la
motherboard. Questo connettore (figura 9) è un
Molex a 20 pin (disposti su due file da 10 pin) con
gancio antisfilamento (figura 10). Il connettore porta le tensioni di 3.3 V (su tre cavi), 5V (su 5 cavi per
il normale funzionamento più un cavo per l’alimentazione in condizione di standby) e 12 V (su 2 cavi);
le tensioni di 5 e 12 V sono fornite con polarità sia
positiva sia negativa.
• Connettore ausiliario di alimentazione per la
motherboard. Si tratta di un piccolo modulo supplementare Molex a 4 pin da collegare accanto a
quello principale, nella presa a 24 pin di cui sono
dotate le motherboard Pentium 4. Fornisce due ulteriori linee di alimentazione a 12 V e due linee di
massa. Qualche volta questo connettore è combinato con quello da 20 pin in un unico Molex 24 pin
(figura 11). Dal punto di vista della motherboard
non cambia nulla: vi è comunque una sede da 24
pin in grado di ospitare indifferentemente la soluzione modulare (20+4) o quella unificata.
• Connettori di alimentazione per memorie di massa IDE P-ATA da 3.5” e 5.25” (dischi fissi e masterizzatori interni): si tratta ancora una volta di un Molex, in questo caso da 4 pin disposti su una fila singola (figura 12); le tensioni portate sono 5 V e 12 V,
più due linee di massa (figura 13). In considerazione del fatto che
in passato una 9
tipica motherboard integrava un controller
IDE a doppio ca-
Fig. 10 - Il connettore
Molex 20 pin è provvisto
di gancio antisfilamento.
Inoltre la sua forma
asimmetrica impedisce
una installazione
rovesciata
nale capace di pilotare quat- 13
tro unità, solitamente erano
presenti quattro connettori di questo tipo. Oggi è però frequente la presenza di
qualche connettore supplementare. Infatti, in modelli
più recenti di motherboard
si è passati a controller SATA, spesso con un maggior
numero di unità supportate; inoltre alcune schede
grafiche richiedono alimentazione supplementare
e accettano lo stesso tipo di connettore delle unità disco, il che significa che quattro connettori in
molte situazioni non basterebbero più. A proposito di S-ATA, le unità disco di questo tipo utilizzano
per l'alimentazione un connettore miniaturizzato
simile a quello della connessione dati (figura 14).
• Connettori di alimentazione per dispositivi da 3.5”
come gli ormai obsoleti floppy disk drive o, più
PC Open 113 Dicembre 2007
Fig. 13 - Nel Molex 4
pin i contatti portano
le tensioni di +5 e
+12V più le rispettive
masse (nero). La
forma del connettore
rende impossibile un
inserimento nel verso
sbagliato
Fig. 9 - Il connettore
principale per
l’alimentazione della
motherboard è un Molex
a 20 pin su due file.
In modelli recenti, con
maggior assorbimento
di corrente, può essere
affiancato da una
estensione a 4 pin o più
IT administrator - Hardware
14
Lezione 9
19
20
Fig. 14 - Le unità S-ATA
usano per l’alimentazione
una connessione
miniaturizzata
completamente diversa
dal Molex tipico dei dischi
P-ATA
1.13.1.4 Sapere
dell'esistenza di APM
ed ACPI
1.13.2 ESD
Fig. 15 - Altre unità
da 3.5” a basso
assorbimento elettrico,
come floppy o frontalini
multifunzione,
utilizzano un connettore
miniaturizzato, che porta
però le stesse tensioni
del Molex normale
Fig. 16 - connettore
lineare a 6 pin era usato
in alcune motherboard
per fornire alimentazione
ausiliarie a 3.3 e 5V
Fig. 17 - Alcune rare
motherboard richiedevano
un Molex supplementare
a 8 pin che portava un
insieme di quattro linee
addizionali da 12V con
relative masse
Fig. 18 - L’alimentazione
supplementare
richiesta da alcune
schede grafiche ad alte
prestazioni può essere
fornita, in certi casi,
mediante questo speciale
connettore
spesso, i frontalini multifunzione con lettori di
schede e repliche di porte USB e Firewire. Questi
connettori Berg miniaturizzati a 4 pin (figura 15)
hanno una piedinatura che riproduce, in piccolo,
quella dei Molex per i dischi fissi; anche i cavi sono
dello stesso colore (giallo per il 12 V, rosso per il 5
V, nero per le masse) ma, in considerazione dell’assorbimento di corrente inferiore, di solito hanno
sezione più piccola.
Alcune motherboard non recentissime richiedevano un ulteriore connettore ausiliario a 6 pin lineari
per fornire altre due linee da 3.3 V e una da 5 V (più
le tre masse corrispondenti). Questo connettore è
praticamente caduto in disuso. (figura 16). Su alcune
motherboard con chipset 945X e supporto a processori Dual Core era richiesto un connettore di alimentazione ausiliario a 8 pin simile a un raddoppio del
Molex 4 pin ausiliario sopra descritto (figura 17). Il
connettore portava un insieme di linee addizionali da
12 V. Infine, alcune schede grafiche ad alte prestazioni
su bus PCI Express a cui non bastano i 75W erogabili
dalle linee di alimentazione standard del bus richiedono una particolare connessione supplementare (figura 18) basata su un connettore a 6 pin (disposti su
due file da 3 pin) simile a un Molex miniaturizzato: vi
sono 3 linee a 12 V con le rispettive masse.
Per il futuro è previsto l’arrivo di nuovi connettori
di natura simile, ma da 8 pin. Ovviamente, per consentire l’impiego di simili schede anche su macchine che
non dispongono delle connessioni all’ultimissimo grido esistono appositi adattatori (figure 19, 20, 21) che
prelevano le necessarie tensioni da altri connettori
più “abbondanti” all’interno del case, come il Molex 4
Pin lineare per le unità disco.
APM ed ACPI, controllo avanzato del consumo
Rispetto ai PC dell’epoca pre-ATX, in cui il controllo
15
16
17
Fig. 19 - Quando una periferica
richiede connettori non disponibili
nell’alimentatore è possibile
rimediare con cavetti adattatori
Fig. 20 - Come sopra, da Molex 4 pin
per dischi IDE a Molex quadrato per
alimentazione supplementare
Fig. 21 - Come sopra, da due Molex 4
pin per dischi IDE a Molex 8 pin 12 V
21
dell’alimentazione era affidato a un normale interruttore meccanico, gli attuali computer rendono possibile un controllo più sofisticato, secondo lo standard
APM (Advanced Power Management), una funzionalità presente nei BIOS per sistemi ATX e relative evoluzioni. In sostanza con APM è possibile supportare
una modalità “suspend-resume” che rende possibile
mandare il PC in uno stato di “letargo a basso consumo” da cui è possibile risvegliarlo in un tempo molto
inferiore a quello richiesto da un vero e proprio avvio
(bootstrap).
Grazie ad APM ciò è controllabile in vari modi:
• Attivazione automatica dopo un certo periodo di
inattività;
• Interruttore a impulso dal frontale del PC;
• Dal menu Start del sistema operativo.
Complementare ad APM è poi il controllo fine, da
parte del sistema operativo, dello stato di alimentazione delle singole periferiche plug-and-play (inclusi
certi tipi di schede PCI), dischi fissi e monitor; queste
ed altre funzioni di risparmio energetico sono offerte
dalla cosiddetta tecnologia ACPI (Advanced Configuration and Power Interface), con cui fra l’altro è possibile far risvegliare il PC dallo standby a seguito di un
messaggio ricevuto via rete, oppure comandare direttamente dal sistema operativo il vero e proprio spegnimento del PC (in epoca Windows 3.1 e Windows
95, alla fine dello shutdown del sistema operativo si
doveva spegnere il computer agendo manualmente
sull’interruttore).
ESD, il pericolo della scarica
18
PC Open 114 Dicembre 2007
Il nemico numero uno dei circuiti elettronici è l’elettricità statica: un fenomeno naturale che sotto certe
condizioni ha l’effetto di produrre su un oggetto un
accumulo di cariche elettriche che alla prima occasione hanno la possibilità di scaricarsi in brevissimo
tempo a contatto con un altro oggetto, sotto forma di
una corrente breve ma molto intensa che può essere
sufficiente a danneggiare le delicatissime linee circuitali presenti nei chip. Fatte le dovute proporzioni, la
Lezione 9
scarica di elettricità statica è paragonabile a un fulmine, localmente distruttivo a causa della notevole concentrazione di carica e dell’intensità dell’arco elettrico che ne costituisce l’esito.
Il limitatore di sovratensioni
e scariche elettrostatiche
Le scariche elettrostatiche (ElectroStatic Discharge,
o ESD) possono prodursi qualora si sia verificato un
accumulo di carica. Questo può essere stato provocato da varie cause: dallo strofinio fra le superfici di
particolari materiali (fra cui alcuni tessuti) ai fenomeni piezoelettrici. In certe situazioni è possibile che si
producano localmente accumuli di carica statica senza che vi sia stato contatto fra oggetti, ma solamente a
causa della vicinanza con un campo elettrico.
L’accumulo di carica ha come effetto secondario
un aumento del potenziale elettrico, a causa del quale
può scatenarsi una corrente non appena se ne presenti l’occasione: un contatto con un corpo conduttore
o anche solo l’avvicinamento a distanza abbastanza
breve da consentire la formazione di un arco elettrico in aria.
Esempi ben noti di scariche elettrostatiche (il cui
verificarsi è sempre favorito dall’aria secca) possono
essere la classica “scossa” che si prende per contatto con parti metalliche scendendo dall’auto, oppure i
crepitii che emettono certi indumenti, specie se fabbricati in lana, nell’indossarli o nel maneggiarli.
Le conseguenti scariche possono anche essere localmente dolorose a causa della già citata notevole
intensità della corrente elettrica che si produce. La
quantità di carica disponibile per questa sorta di “mini-fulmine” è però talmente piccola che la corrente si
esaurisce in brevissimo tempo, cosicchè la quantità
di calore sviluppato per effetti dissipativi è trascurabile e il fenomeno non può avere esito letale per le
persone.
I circuiti integrati, invece, sono molto più delicati e
vulnerabili: le piste che conducono la corrente all’interno dei chip sono microscopiche tracce metalliche
larghe pochi nanometri (milionesimi di millimetro),
che una corrente breve ma intensa può facilmente
portare a temperatura di fusione causando un danno
irreparabile al chip.
Per evitare che una scarica di elettricità statica
possa abbattersi sui delicati circuiti elettronici del
computer è necessario allestire una “barriera” che
assorba il picco di corrente e non gli consenta di raggiungere i componenti da proteggere.
Sempre in analogia con il modello idraulico, concettualmente il principio può essere quello di interporre una sorta di grosso “contenitore” vuoto (condensatore scarico) che, in caso di “ondata di piena”
(picco di tensione con conseguente picco di corrente), possa riempirsi d’acqua (cariche elettriche) mantenendo in uscita un flusso quasi invariato ed evitando… l’inondazione vera e propria.
È chiaro che un filtro di questo tipo sarà tanto più
efficace nella neutralizzazione di picchi quanto più
grande sarà la capacità del condensatore. Altre tecniche protettive, che possono essere combinate con
quella descritta, si basano sull’uso di componenti di
natura elettromagnetica che si oppongono al passaggio di improvvisi picchi di corrente (induttori), oppure componenti che, anche al di là del transitorio, possono sostenere intensità di corrente limitate e interrompono bruscamente il circuito in caso di eccesso
(fusibili), oppure ancora componenti elettronici che,
al presentarsi di un picco di tensione, o lo “dirottano”
aprendosi totalmente verso massa, impedendone così il transito fino al carico da proteggere (varistor),
IT administrator - Hardware
oppure assor- 22
bono la quota
eccedente il
valore ammissibile, così da
assicurare di
erogare sempre una tensione nei limiti
(diodi Zener).
Una o più di queste e altre tecniche ancora possono essere impiegate in speciali dispositivi che si incaricano di bloccare le sovratensioni prima che raggiungano e danneggino in primo luogo l’alimentatore
stesso e poi i componenti interni del PC.
Si tratta dei cosiddetti “surge protector” e possono presentarsi come delle normali prese multiple (figura 22) al cui interno si trovano circuiti come quelli
sopra descritti. Grazie ad essi è possibile proteggersi
da picchi di tensione provenienti dalla rete elettrica
come quelli che si verificano in occasione di fulmini,
guasti o black-out. In alcuni casi il surge protector può
anche essere incorporato nell’alimentatore, anche se
per una efficace protezione (e una facile sostituzione)
è preferibile la soluzione esterna.
Protezione dell'hardware contro i danni
da scariche elettrostatiche
La prevenzione delle scariche elettrostatiche è
quindi essenziale quando si maneggiano schede,
componenti e circuiti per espandere, assemblare o
riparare un PC. La strategia è ovviamente quella di rimuoverne la causa all’origine, evitando che si possa
formare un accumulo di cariche.
Per fare questo è essenziale che vi sia costantemente un collegamento elettrico fra il corpo dell’operatore e lo chassis metallico del PC. In questo modo
le cariche si disperdono appena si formano e non hanno la possibilità di concentrarsi; di conseguenza non
può aversi un potenziale elettrico con conseguente
scarica. A questo scopo si utilizzano speciali braccialetti conduttivi (figura 23) da cui esce un cavetto da
collegare al telaio, per esempio a una vite di fissaggio.
Analogamente, schede di espansione, moduli DIMM
e dischi fissi vengono solitamente immagazzinati e
consegnati in
buste di pla- 23
stica metallizzata (figura
24), così da distribuire eventuali accumuli
di carica uniformemente sull’involucro (anziché
su una regione circoscritta
del contenuto
della busta) e
da cederli subito al primo
contatto con le mani dell’operatore, risparmiando lo shock
24
elettrico al dispositivo.
Altri accorgimenti utili consistono nel non fare uso di indumenti di lana, perché particolarmente propensi a favorire processi di
elettrizzazione per strofinio, né di scarpe di gomma,
perché essendo altamente isolanti non permetterebbero la dispersione a terra delle cariche. Meglio anche non usare un tappeto (specie se in lana!) per en-
PC Open 115 Dicembre 2007
Fig. 22 - Una presa
multipla filtrata dotata di
circuito di soppressione
degli sbalzi di tensione
(surge protector).
Spesso i fornitori di
questo tipo di dispositivo
offrono una garanzia
gratuita contro danni da
sovratensione subiti dalle
apparecchiature collegate
1.13.2.1 Sapere
cos'è e come
funziona un limitatore
di sovratensioni
[surge protector].
Sapere in cosa
consistono e quando
capitano le scariche
elettrostatiche (ESD).
Conoscere inoltre
quali danni hardware
possono causare.
1.13.2.2 Conoscere
le modalità
di protezione
dell'hardware contro
i danni da scariche
elettrostatiche.
Essere informati
sulle condizioni
climatiche che
possono influire.
Fig. 23 - Un braccialetto
antistatico, collegato
alla massa del PC,
impedisce l’accumulo di
cariche elettrostatiche
e di conseguenza la
loro successiva scarica
improvvisa con potenziali
effetti distruttivi sui
circuiti del computer.
Naturalmente resta
indispensabile che il PC,
durante le operazioni,
sia scollegato dalla rete
elettrica!
Fig. 24 - Buste
antistatiche con l’interno
ricoperto di una sottile
pellicola conduttiva
evitano l’accumulo
localizzato di cariche e
sono per questo usate
per confezionare dischi e
schede elettroniche
IT administrator - Hardware
trambi i motivi. Come già accennato, infine, è bene
tenere conto che c’è sempre da aspettarsi una recrudescenza di tutti i fenomeni citati se l’aria è secca.
Non soltanto l’accumulo di carica è facilitato perché
l’elettrizzazione per strofinio avviene di preferenza
in questo ambito, ma anche la scarica successiva è
più violenta perché in aria secca è più difficile che si
formi un arco elettrico: di conseguenza l’accumulo di
carica prosegue, non essendovi possibilità di scarica
tramite scintilla, e il potenziale cresce notevolmente.
Quando però l’arco elettrico si forma, il potenziale è
ormai talmente alto che la corrente risulta elevatissima. In aria secca, l’isolamento è talmente efficace
che alla distanza di 1 cm può formarsi una differenza di potenziale anche di 20.000 V prima che scocchi
una scintilla. Quando ciò accade, al circuito integrato
(progettato per lavorare a 5 V o meno) viene applicata una tensione anche 4.000 volte maggiore del valore nominale: il danno circuitale in simili condizioni è
praticamente certo.
1.13.3 UPS
1.13.3.1 Sapere
cos'è e come
funziona un gruppo
di continuità (UPS).
Inoltre conoscere
le modalità
d'interazione dei
diversi modelli di UPS
con le attività del PC
Fig. 25 - Un piccolo UPS
per uso residenziale o
Small Office. A volte
solo alcune delle uscite
sono protette contro il
black-out e le altre sono
solo protette contro
sovratensioni, come se
fossero collegate a un
surge protector. In questo
caso si collegheranno il
PC o i dischi esterni alle
prime e i monitor o le
stampanti alle seconde
UPS, per evitare perdite
Come abbiamo visto, l’alimentatore si incarica di
adattare alle necessità interne la corrente in ingresso (alternata, 220 V) proveniente dalla rete elettrica,
riducendo la tensione ai vari valori richiesti (3.3 V, 5
V, 12 V) ed assicurando una adeguata intensità di corrente per fornire una potenza in linea con le esigenze
dei vari componenti. Tutto questo però è possibile
soltanto se la fornitura di energia elettrica in ingresso è stabile: l’alimentatore trasforma e adatta la corrente ricevuta, ma non può generarla al suo interno.
Qualora si verifichi un’interruzione sulla rete, questa si ripercuoterà a valle dell’alimentatore, facendo
mancare ai componenti del PC l’energia necessaria
per funzionare. È sufficiente che un’interruzione anche brevissima raggiunga la CPU per alterare in modo irrecuperabile la precisa successione cadenzata
di eventi elettronici che attua l’esecuzione delle istruzioni dei programmi e del sistema operativo, al punto che la CPU perde anche “il filo” di quello che stava facendo, ossia viene persa la conoscenza di quale
sia la prossima istruzione da eseguire, si cancellano
le aree di memoria di lavoro (registri) e così via. Il risultato è che l’esecuzione si arresta oppure procede
in modo scorretto.
La CPU non è l’unico componente che non gradisce le interruzioni: tanto per fare un altro esempio, se
durante il funzionamento viene a mancare l’alimentazione a un’unità disco, magari proprio mentre stava
scrivendo dati, questi ultimi possono risultare alterati, oppure venire scritti in modo incompleto e inconsistente, oppure ancora può venire a mancare per
qualche istante
il controllo fine 25
del posizionamento della testina, col risultato che possono
venire corrotti
dati che erano
stati correttamente scritti in
precedenza su
aree adiacenti
del disco. In tutti i casi si registra perdita o alterazione di dati
e, oltretutto, non
PC Open 116 Dicembre 2007
Lezione 9
sempre il danno risulta immediatamente evidente:
circostanza questa che aggrava la situazione in quanto impedisce anche di reagire subito per ripristinare
i dati da un backup o intraprendere altre azioni correttive.
La soluzione è quella di installare un gruppo di continuità, o Uninterruptible Power Supply (UPS, letteralmente “Alimentatore non interrompibile”) : un apparecchio che lavora a monte dell’alimentatore, esattamente come un surge protector, solo che lo protegge
non da picchi di tensione/corrente, ma dalla temporanea mancanza degli stessi (figura 25).
In sostanza, se per un tempo non troppo lungo la
rete cessa di fornire energia, subentra istantaneamente l’UPS che fa le veci del fornitore primario e assicura
all’alimentatore un ingresso stabile a 220 V per un certo periodo, di solito sufficiente o ad attendere il ripristino della normale fornitura dalla rete (nella maggior
parte dei casi le interruzioni durano pochi istanti) o,
per black-out più persistenti, a permettere di salvare
i dati, chiudere le applicazioni e spegnere regolarmente il PC. L’UPS infatti ha un accumulatore interno che
in assenza della fonte primaria provvede a erogare
l’energia necessaria, ma questo accumulatore ha evidentemente una capacità limitata; erogando corrente si scarica progressivamente e nel giro di qualche
minuto (a seconda dei modelli e dell’assorbimento
da parte del carico) si esaurisce. Nella solita analogia idraulica possiamo paragonare l’UPS a un invaso
artificiale utilizzato per assicurare un regolare flusso
d’acqua all’acquedotto o a sistemi di irrigazione anche nei periodi di siccità: il suo livello (carica della
batteria) viene mantenuto al massimo quando c’è abbondanza d’acqua, mentre nella stagione secca si attinge acqua fino a esaurimento della sua capacità.
Alcuni alimentatori particolarmente curati possono incorporare al loro interno un UPS miniaturizzato
che assicura una protezione da blackout per qualche secondo. Si tratta di una funzione utile in molte
circostanze ma, date le ridotte dimensioni, non può
certo ospitare un accumulatore di elevata capacità:
per una protezione soddisfacente contro interruzioni
più prolungate è quindi necessario dotarsi di un UPS
esterno. Fortunatamente sul mercato sono facilmente reperibili modelli di buone prestazioni, non troppo
ingombranti e a costi ragionevoli. Questo è particolarmente importante nei sistemi mission critical, la cui
alimentazione, nelle organizzazioni medio-piccole, generalmente non può essere protetta da veri e propri
impianti UPS come quelli che proteggono interi siti
industriali: in quest’ultimo caso si tratta di macchine
delle dimensioni di un container che contengono non
un accumulatore elettrico, ma un generatore autonomo solitamente azionato da un motore diesel.
Le principali caratteristiche da valutare nella
scelta degli UPS
1) il carico massimo sopportabile, espresso in VA
(Volt – Ampere). Naturalmente è sempre saggio sovradimensionare l’UPS rispetto all’assorbimento teorico
dell’insieme dei sistemi da proteggere (non solo il PC
ma anche il monitor, il modem-router, eventualmente
la stampante, e così via). Sarà così possibile assorbire
picchi inattesi di carico, senza contare che l’autonomia durante il black-out sarà maggiore.
2) il tempo di commutazione della fonte di alimentazione da rete elettrica a batteria interna. Tale tempo
(che deve essere dell’ordine dei pochi millisecondi al
massimo) va confrontato con il tempo massimo sopportabile, in condizioni di assenza di alimentazione,
dalla più “esigente” tra le unità da proteggere.
3) la durata massima del periodo di autonomia in
Lezione 9
assenza di alimenta- 26
zione in condizione
di carico massimo. A
seconda del dimensionamento, l’UPS
può lasciare giusto
il tempo per salvare i
dati e chiudere le applicazioni (una decina di minuti) oppure
permettere una vera
“business continuity” per un tempo di
diverse ore. Fra questi due scenari passa
una differenza molto
rilevante per quanto riguarda il dimensionamento e
il costo dell’UPS (che sarà varie decine di volte maggiore nel secondo caso).
4) il tempo richiesto per una ricarica completa. Si
tratta di un valore essenziale per sapere quali chance ha il sistema di resistere a due o più black-out in
rapida successione. In molti casi il processo di carica
è di gran lunga più lento di quello di scarica: un UPS
che garantisce 10 minuti di autonomia a carico massimo può impiegare ore per ricaricarsi completamente. Questo evidentemente pone limiti precisi non solo
alla durata degli incidenti di alimentazione, ma anche
alla loro frequenza. La soluzione è ancora una volta
quella di sovradimensionare l’UPS.
5) la capacità di smorzare sovratensioni, disturbi
impulsivi e scariche conseguenti a fattori meteorologici o a disservizi della rete elettrica: come già accennato, questa prestazione può essere fornita da un
surge protector separato, ma può anche essere intrinseca per il tipo di tecnologia dell’UPS (come spiegato
più avanti) oppure essergli conferita da un modulo
dedicato interno.
6) la capacità di interfacciarsi a livello logico-applicativo con i sistemi sotto protezione, in modo da forzare il salvataggio automatico dei dati e lo shutdown
ordinato dei sistemi stessi. Di solito ciò avviene mediante collegamento seriale o USB (figura 26) ed è richiesta l’installazione di un apposito software di supervisione. Tale software raramente è disponibile su
molti sistemi operativi diversi, pertanto è importante
valutare con attenzione la qualità del supporto software offerto dal fornitore dell’UPS.
7) la disponibilità di un sistema di controllo remoto per il monitoraggio dello stato di carica della batteria e per la consultazione di un log degli eventi critici che si sono verificati. Se ne possono trarre utili
informazioni per dimensionare meglio l’UPS e perfino per sporgere reclamo verso il fornitore di energia
elettrica.
8) il tipo di tecnologia. In ordine crescente di protezione, di rapidità di commutazione e di immunità dai
disturbi sull’alimentazione primaria, ma anche di costo, vanno ricordate tre tecnologie di UPS:
• il tipo Passivo, che interviene solo in caso di mancanza di alimentazione, ma non filtra l’alimentazione proveniente dalla rete primaria;
• il tipo On line interactive, che regola e filtra la tensione della rete primaria mantenendo contemporaneamente in carica la batteria: in caso di blackout
un commutatore rapido la fa entrare immediatamente in servizio, con una interruzione quasi impercettibile;
• il tipo Online a doppia conversione, che alimenta il
carico permanentemente dalla batteria. Quest’ultimo tipo di unità trasforma costantemente in corrente continua la corrente alternata in ingresso me-
IT administrator - Hardware
diante un raddrizzatore; la corrente continua così
ottenuta viene in parte usata per la carica di mantenimento della batteria, mentre il resto viene nuovamente convertito in corrente alternata per il carico, con parametri assolutamente stabili e totale
disaccoppiamento da eventuali disturbi presenti
sull’alimentazione primaria.
Fig. 26- Alcuni UPS
sono provvisti di una
porta USB o seriale
grazie alla quale, in
caso di black out,
possono comunicare al
PC che l’alimentazione
è entrata in regime di
protezione
Correnti di picco
Esiste un legame importante fra il verificarsi di disturbi, sovratensioni e scariche sulla rete elettrica e
la diffusione degli alimentatori switching nelle apparecchiature elettroniche e informatiche. Per le necessità del funzionamento del modulo switching, infatti,
fra questo e la connessione alla rete elettrica vengono
interposti un filtro antiinterferenze e una serie di condensatori ad alta capacità che nei primissimi istanti di funzionamento devono raggiungere una carica
completa per stabilizzare il funzionamento dell’unità. L’elevata capacità di questi condensatori richiede
una grande quantità di carica per raggiungere condizioni di regime. Questo dà luogo a correnti di elevata
intensità (anche se di breve durata) che l’alimentatore assorbe nei suoi primi istanti di funzionamento.
Senza una adeguata protezione, all’inizio il comportamento sarebbe paragonabile a quello di un corto
circuito, con correnti che danneggerebbero la rete
elettrica domestica se non scattasse l’interruttore di
protezione del quadro elettrico. Come misura di protezione per la delicata fase di accensione, l’alimentatore switching contiene una resistenza variabile (varistor) con funzioni di limitatore di corrente. Resta il
fatto che nonostante l’azione di questo componente
la corrente inizialmente assorbita è notevolmente superiore a quella di regime, pertanto all’accensione è
possibile che l’alimentatore switching, con il suo picco di assorbimento, provochi cali di tensione disturbi
ad altre apparecchiature collegate alla rete.
Per quanto riguarda le protezioni, ricordiamo inoltre che nell’alimentatore switching, lato rete, è sempre presente anche un fusibile. La funzione di questo
fusibile non è tanto quella di proteggere l’alimentatore da sovracorrenti originate dalla rete, ma piuttosto, al contrario, quella di proteggere la rete da un
eventuale corto circuito causato da un guasto ai condensatori, oltre naturalmente a impedire che un tale
corto circuito possa durare per un tempo sufficiente
a provocare surriscaldamento dei condensatori, che
“esploderebbero” con conseguente rischio d’incendio. Normalmente il fusibile non è sostituibile, ma è
addirittura saldato alla scheda del circuito interno
dell’alimentatore: questo perché quando si arrivano a
determinare condizioni tali da richiedere il suo intervento, è praticamente certo che gli altri i componenti
del primo stadio dell’alimentatore (varistor, condensatori e transistor) sono stati già gravemente compromessi dalle forti correnti circolate (tanto forti da
provocare, appunto, l’interruzione del fusibile). Sostituire il fusibile con uno nuovo e tentare di riaccendere l’alimentatore sarebbe quindi non solo inutile, ma
addirittura pericoloso: si rimetterebbero sotto tensione componenti alterati e probabilmente già finiti
in corto circuito.
Installazione di nuovo hardware
Effettuare interventi di piccola manutenzione al
proprio PC, come espansioni di memoria, aggiunte di
ulteriori unità disco, aggiornamenti dei componenti e così via, non è difficile e richiede breve tempo, a
PC Open 117 Dicembre 2007
1.13.3.2 Conoscere
il problema delle
correnti di picco
all'accensione
degli alimentatori
“switching”
1.14 Installazione di
nuovo hardware
1.14.1 Installare e
sostituire l'hardware
IT administrator - Hardware
condizione di conoscere l’ambiente in cui ci si trova
a lavorare e di osservare le dovute precauzioni di sicurezza per sé stessi e per le apparecchiature elettroniche da maneggiare. Lo scopo di questa sezione del
corso è quello di familiarizzare il lettore con le componenti da installare, i connettori e i cavi e le questioni
meccaniche di montaggio, suggerendo inoltre prescrizioni elementari per ridurre il rischio di danneggiare
i componenti trattati. Fornire una conoscenza completa delle norme di sicurezza esula invece dagli scopi del corso; per le prescrizioni di installazione/disinstallazione specifiche per ogni apparecchio, inoltre,
rimandiamo alle istruzioni fornite dal fabbricante.
Mai lavorare con il PC collegato alla rete elettrica
Fig. 27 - Gli zoccoli
per CPU ormai da
anni sono del tipo
Zero Insertion Force
(ZIF): per il montaggio,
il chip non va premuto
ma semplicemente
deposto in sede,
dopo aver azionato la
levetta di sblocco. In
alcuni tipi di socket è
la CPU a presentare
i pin; in altri casi si
trovano sul socket
e la CPU è invece
provvista di fori.
1.14.1.1 Essere in
grado d'installare
e sostituire i
componenti di base,
quali: CPU, memoria,
alimentatore, scheda
madre, disco rigido,
adattatore grafico
ecc.
Una premessa che è indispensabile evidenziare da
subito e tenere sempre presente è: MAI lavorare sul
PC finché è collegato alla rete elettrica, anche se è
spento. Spegnere il PC non costituisce ancora una
precauzione sufficiente, in quanto l’alimentatore ATX
è ancora sotto tensione e sta comunque funzionando (eroga infatti tensioni di standby da usare come
innesco per l’accensione) e in caso di rete elettrica
sprovvista di una adeguata messa a terra l’involucro
di massa dell’alimentatore e quello del PC possono essere fonte di pericolo, specialmente in caso di guasto
o deterioramento di alcuni componenti interni dell’alimentatore: a seconda dello schema circuitale di
quest’ultimo, in assenza di messa a terra la massa del
PC è di fatto collegata alla rete elettrica attraverso dei
condensatori. In alcune installazioni, con alimentatori
troppo economici o in procinto di guastarsi, e con una
cattiva messa a terra, al contatto con il case metallico
del PC è possibile avvertire una leggera scossa, perfino a PC spento. È il segnale che qualcosa non va nella messa a terra o nell’alimentatore: questo segnale
non va assolutamente ignorato, per evitare rischi per
sè e per il PC. Infine, si ricordi che nell’alimentatore
power switching sono contenuti dei condensatori di
alta capacità che accumulano una notevole quantità
di carica: questa carica può essere mantenuta anche
per lunghi periodi in assenza di collegamento alla rete elettrica. Poichè anche scollegando il PC dalla rete 220 V questi condensatori rimangono carichi, se si
vengono a creare condizioni idonee essi possono scaricarsi erogando correnti impulsive anche di notevole
intensità. Per evitare rischi di folgorazione, MAI aprire
l’involucro dell’alimentatore né inserire oggetti (specie se metallici) nelle sue feritoie e MAI toccare o cortocircuitare i contatti dei cavi di alimentazione che ne
escono. Per riassumere: prima di operare sul PC, non
limitarsi a spegnerlo, ma scollegare il cavo di alimentazione dalla rete, e stare alla larga dall’alimentatore,
perfino mentre il cavo 220 V è scollegato.
Seconda premessa: per quanto riguarda le periferiche dotate di alimentazione da rete elettrica (tramite
alimentatore incorporato o esterno) non effettuare
MAI collegamenti o scollegamenti al PC finchè questo
è acceso, specialmente se le periferiche e il PC sono
collegate a prese elettriche diverse potenzialmente
appartenenti a reti di alimentazione diverse. All’atto del collegamento del cavo potrebbero infatti registrarsi differenze di potenziale tali da danneggiare le
due controparti. Questa precauzione non si applica a
periferiche come USB o Firewire, di tipo “hot plug” e
alimentate dalla porta del PC a cui si collegano.
Installare e sostituire i componenti di base
L’installazione o sostituzione della CPU è un’operazione alla portata di chiunque, soprattutto oggi che
gli alloggiamenti in cui tale componente viene inserito
(socket) sono del tipo ZIF (Zero Insertion Force): per
PC Open 118 Dicembre 2007
Lezione 9
inserire o rimuovere il chip non occorre esercitare alcuna forza e di conseguenza il rischio di danneggiare
o piegare alcuni pin è praticamente assente (figura
27). Vi sono comunque diverse accortezze da seguire. La procedura di rimozione/inserimento si può così riassumere:
• Durante tutta la manovra, oltre a scollegare il PC
dalla rete, osservare le classiche precauzioni per
evitare l’accumulo di elettricità statica; se possibile lavorare con un braccialetto di dispersione collegato allo chassis.
• Scollegare i cavetti di alimentazione dall’eventuale
dissipatore attivo (ventola) montato sul corpo alettato sopra la CPU.
• Seguendo le istruzioni del fabbricante del particolare tipo di dissipatore utilizzato, disimpegnare
meccanicamente dalla motherboard l’armatura di
fissaggio del dissipatore (a seconda dei casi l’operazione può richiedere di agire su mollette, clip,
perni di plastica a espansione, viti). Nel farlo, specie se si fa uso di utensili a punta, prestare attenzione a non ledere accidentalmente le piste del circuito stampato della motherboard graffiandole.
• Il corpo alettato del dissipatore è spesso fatto aderire alla faccia superiore della CPU mediante pasta
termoconduttiva all’argento. Non si tratta di un vero e proprio incollaggio (lo scopo non è quello di
fissare il dissipatore, ma solo quello di favorire la
trasmissione del calore) tuttavia le due parti oppongono una certa forza alla separazione. Un modo per facilitare il distacco è quello di non esercitare una trazione, che potrebbe danneggiare CPU,
socket e motherboard, ma una leggera torsione intorno all’asse perpendicolare alla CPU, alternativamente nei due sensi. È sconsigliabile fare leva
con un cacciavite o altro oggetto piatto inserendolo fra CPU e dissipatore: si potrebbe danneggiare la
CPU.
• Una volta distaccato il dissipatore la CPU può essere sganciata dal socket. Per questo, sbloccare la
levetta di disimpegno ZIF e sollevarla in posizione
verticale. Le sedi dei pin lasciano la presa ed è possibile sollevare la CPU senza sforzo. Riporre la CPU
in un supporto antistatico a “rotaia” per chip (Tray)
oppure su un apposito blocco di gommapiuma antistatica.
• La nuova CPU può essere inserita sul socket. Nel
manovrarla evitare nel modo più assoluto di toccare con le dita i pin! Tenere il chip toccando solo
il perimetro, se possibile utilizzare una pinza per
circuiti integrati. Fare attenzione all’orientamento. Il socket può anche essere quadrato, ma vi è un
verso d’inserimento ben preciso, che risulta evidente esaminando la posizione dei pin mancanti.
Far coincidere le loro posizioni con i riferimenti
sul socket, appoggiare in sede la CPU verificando
che abbia trovato un appoggio perfettamente piano (se resta inclinata è segno che l’orientamento
non è quello corretto: riposizionarla e provare), poi
bloccarla in sede con la levetta ZIF.
• Applicare una modesta quantità di pasta 27
termoconduttiva al
centro della faccia superiore della CPU (attenzione! Una quantità eccessiva potrebbe debordare, finendo sui circuiti della
motherboard col rischio di causare un
corto circuito!).
Lezione 9
• Applicare il dissipatore e reinstallare l’incastellatura di fissaggio meccanico.
• Ricollegare il cavo di alimentazione della ventola
(la forma del connettore assicura che la polarità
venga rispettata: se l’orientamento è corretto l’inserimento non opporrà che una minima resistenza.
Prestare quindi attenzione a non forzare i riscontri
in rilievo durante la manovra).
La sostituzione dell’alimentatore non è un’operazione complessa ed è l’unica cura valida in caso di
malfunzionamento. In nessun caso si dovrà aprire
l’involucro dell’unità, né tentare di riparlarla. Per
la sostituzione, dopo aver naturalmente scollegato
il cavo 220 V, osservare questa procedura di massima:
• Scollegare tutti i cavi di alimentazione che collegano l’alimentatore ai componenti alimentati e alla motherboard. Può essere utile contrassegnare i
cavi effettivamente utilizzati, per non confondersi,
in fase di rimontaggio, con quelli in sovrannumero
(che sono sempre presenti); è anche utile disegnare una mappa della motherboard con l’indicazione
dei connettori ai quali erano collegati dei cavi prima di iniziare lo smontaggio. Non tutti i cavi, infatti, servono in ogni configurazione e viceversa non
tutte le sedi su motherboard e altri componenti
richiedono necessariamente di essere collegate a
cavi: alcune sono destinate a collegamenti opzionali.
• L’alimentatore è fissato allo chassis da 3-5 viti a seconda dei modelli. Tolte le viti, in molti cabinet non
vi sono mensole metalliche o profili che lo mantengano in sede, per cui potrebbe cadere, col rischio
di urtare con i propri spigoli qualche componente o pista circuitale della motherboard. Per evitare che questo succeda, prima di procedere con lo
smontaggio, disporre un separatore morbido fra
alimentatore e la sottostante elettronica o tenerlo
ben fermo con una mano.
• A smontaggio avvenuto, rimuovere l’alimentatore
evitando strattoni a eventuali cavi non ancora scollegati e collocare al suo posto la nuova PSU. Fissare
subito almeno parzialmente una vite per assicurare
la stabilità meccanica ed evitare il rischio di cadute, poi completare l’operazione passando alle altre
tre. Fermare le viti con forza uniforme.
• Ripristinare le connessioni elettriche liberando le
sole fascette effettivamente necessarie. Evitare che
i cavi inutilizzati penzolino liberamente nel cabinet:
rischierebbero di interferire con la rotazione delle
ventole e questo potrebbe compromettere il raffreddamento della CPU o della scheda grafica, col
rischio di portarli a surriscaldamento e guasto!
• Prima di ricollegare l’alimentazione, fare estrema
attenzione all’eventuale selettore della tensione.
Se l’alimentatore è progettato esclusivamente per
la tensione a 220-230 V, o è autoadattativo, questo
non è necessario. In altri modelli vi è invece un selettore scorrevole che consente di adattare l’unità alla tensione di ingresso: 110 V o 220 V. In questo caso assicurarsi che sia selezionata la tensione
220 V! In caso contrario è praticamente certo che il
nuovo PSU si guasterà alla prima accensione.
IT administrator - Hardware
rie. Qui interessa sottolineare i tre aspetti principali a
cui prestare attenzione: i danni da elettricità statica,
la manovra meccanica di fissaggio, le regole d’installazione e di compatibilità (per esempio per sistemi
dual channel).
• Per quanto riguarda la protezione dai danni da scariche elettrostatiche, avendo a che fare con le memorie si ricordi semplicemente di applicare con la
massima diligenza le normali misure cautelative.
La RAM, i cui chip immagazzinano ormai miliardi di
bit su circuiti tracciati su un’area di pochi millimetri quadrati di silicio, utilizza componenti elettronici costruiti su scala talmente ridotta da risultare
estremamente vulnerabili a sollecitazioni elettriche o termiche fuori dai limiti nominali, ancor più
di quanto accade negli altri tipi di chip.
• Pur con le inevitabili differenze dovute al tipo di
zoccolo usato (per esempio, nei notebook il montaggio è parallelo alla motherboard, mentre nei
desktop è sempre perpendicolare) il fissaggio in
sede dei moduli si basa su una manovra standard.
Durante tutta l’operazione è importante non toccare i contatti del modulo, né i chip di memoria o
i contatti che li circondano. Il modulo deve essere
maneggiato tenendolo dai bordi. Dopo aver identificato il giusto verso d’inserimento in base alla posizione della tacca di riscontro su modulo e socket,
il modulo si appoggia delicatamente in sede tenendolo inclinato di 30 gradi circa rispetto alla posizione stabile. Dopo aver verificato che il connettore si sia effettivamente impegnato nel canale della
contattiera sul fondo del socket, e che la tacca di
riscontro combaci correttamente, si deve delicatamente portare il modulo nella posizione finale (perpendicolare o parallela al piano della motherboard
a seconda del tipo di sistema) fino a far scattare entrambi i fermagli di ritegno a molla, che devono impegnarsi a fondo nella posizione di riposo. In caso
contrario provare ad aiutarli forzandoli leggermente. Se uno o entrambi si ostinano a non allinearsi
ai bordi del modulo è possibile che questo non sia
stato deposto in sede correttamente. In tal caso,
sganciarlo e ricominciare dall’inizio la procedura.
Al contrario, la manovra di sgancio richiede di aprire gli stessi fermagli, cosa che può risultare difficile da compiere senza un cacciavite, a causa del
ridotto spazio e della forza delle molle. Si inizierà
a disimpegnare la molletta su un lato, inclinando
delicatamente il modulo su quel lato quanto basta per impedire alla molletta di reimpegnarsi nella sede, e si passerà poi allo sgancio della molletta
sull’altro lato. Dopodichè il modulo andrà inclinato e infine estratto sfilandolo in direzione del suo
stesso piano.
• Su recenti sistemi ad alte prestazioni, per aumen-
28
Un upgrade al sistema, una sostituzione con modelli di capacità maggiore o con prestazioni migliori, una
sostituzione dopo un guasto: tutte situazioni in cui occorre familiarizzarsi con i moduli di memoria DIMM
e con la loro modalità d’installazione sulla motherboard. Per quanto riguarda le differenze esistenti fra
i numerosi formati di moduli DIMM, rimandiamo alla
puntata del corso dedicata all’argomento delle memo-
PC Open 119 Dicembre 2007
Fig 28 - Nelle
motherboard che
supportano schemi di
memoria dual channel
per l’incremento delle
prestazioni, gli zoccoli
sono colorati in modo
differenziato per
aiutare a posizionare
correttamente i moduli
“gemellati”
IT administrator - Hardware
1.14.1.2 Essere in
grado d'installare
e configurare un
secondo disco rigido
o un drive CD ROM
Lezione 9
tare la banda verso la memoria si usano schemi
“dual channel” in cui i moduli vengono usati in coppia (figura 28). Le indicazioni pratiche al riguardo
sono due: i moduli di ogni coppia devono essere
assolutamente identici (non a caso sono in commercio kit di moduli accoppiati aventi le stesse caratteristiche di temporizzazione e stati d’attesa) e
devono essere installati in sedi ben precise. La documentazione della motherboard indica sempre in
quali posizioni devono essere installati. In genere i
socket vengono colorati in modo appaiato per evidenziare tale regola, ma il significato del colore non
è sempre quello intuitivo, per cui è meglio fare riferimento alle istruzioni (reperibili anche sul sito del
produttore).
Il montaggio di una scheda madre è l’operazione di
manutenzione/assemblaggio più lunga e tediosa,
ma non vi sono passi elementari insormontabili.
Basta prendere le precauzioni dovute per portare
a termine l’impresa senza problemi.
• È importante anzitutto assicurarsi che il cabinet sia
di tipo compatibile con il formato (“form factor”)
della motherboard. In caso contrario è inutile proseguire: sarebbe tutto al posto sbagliato, dalle sedi
delle viti ai percorsi dei cavi, al pannello posteriore.
• Una volta verificata la conformità di cabinet e
motherboard, effettuare su quest’ultima una ricognizione dei fori per le viti di fissaggio (figura 29),
aiutandosi con la documentazione fornita dal produttore; effettuare una simulazione di installazione
per controllare che il case disponga effettivamente
dei fori richiesti nelle posizioni corrispondenti alle
sedi sulla motherboard.
• Assicurarsi anche che sia stata fornita tutta la minuteria di fissaggio necessaria, in quantità sufficiente per l’impiego su tutti i fori (fondamentalmente si
tratta di viti, rondelle e, a volte, distanziali).
• Verificare che il cabinet abbia un’apertura di dimensioni adeguate e nella posizione giusta per il
pannello posteriore della motherboard,
29
da cui si affacceranno le varie connessioni previste (tastiera, mouse, USB, rete ed
30
Fig 29 - Il fissaggio
della motherboard al
case avviene per mezzo
di un certo numero di
viti (in genere fra 4 e
8 a seconda dei casi)
che sulla motherboard
sono caratterizzate
da un apposito alone
protettivo metallizzato.
E’ necessaria una
ricognizione per verificare
che in corrispondenza dei
fori sulla motherboard
esistano le necessarie
sedi sul fondo del case
Fig. 30 - Il manuale
della motherboard
riporta sempre una
vera e propria “mappa”
grazie alla quale è facile
localizzare rapidamente
jumper e piccole
connessioni ausiliarie,
oltre a evitare errori
nell’installazione di DIMM
e schede di espansione
•
•
•
•
•
eventuali seriale e parallela, audio, video, Firewire
ed e-SATA).
Dopo aver appoggiato sul fianco il cabinet in modo
tale da lavorare su una superficie orizzontale, appoggiare in sede la motherboard. Qualora occorra far uso di distanziali questi andranno collocati
per primi in corrispondenza dei fori di fissaggio.
Applicare le rondelle sulle apposite piazzole nella
motherboard, quindi inserire le viti ed effettuare a
mano le prime rotazioni per assicurarsi che l’allineamento alle sedi sia corretto. Effettuare una ricognizione per verificare che il pannello posteriore
sia nella posizione corretta. Completare il fissaggio
fermando le viti con forza uniforme.
Effettuare i collegamenti elettrici verso l’alimentatore identificando i cavi effettivamente necessari.
Aiutandosi con la mappa della motherboard riportata sul manuale (figura 30), identificare i jumper
per le connessioni ausiliarie e collegare i relativi
cavi. L’insieme di cavi da collegare può variare a seconda delle caratteristiche del cabinet. Fra le connessioni elettriche più comuni ricordiamo quelle
dei cavi di: interruttore di alimentazione, LED di accensione/attività hard disk, altoparlante, USB frontali, prese audio frontali, presa Firewire frontale,
lettore di schede, sensore di apertura coperchio,
interruttore-chiave di sicurezza, ventole di raffreddamento (CPU, telaio, scheda grafica e così via).
Installare la CPU, la memoria e le schede di espansione. Per quelle schede di espansione che richiedono una alimentazione supplementare (tipico
esempio sono le schede grafiche ad alte prestazioni, che consumano molta corrente), provvedere al
collegamento.
Effettuare le connessioni dati: fra le più comuni ricordiamo quelle per floppy drive (a volte sostituito da un lettore di schede), hard disk, unità ottica.
Queste ultime possono essere di tipo IDE, nelle varianti P-ATA o S-ATA. Il cavo P-ATA è piatto, bianco/
grigio, a 40-80 connettori, con una tacca asimmetrica poco evidente che dovrebbe ridurre il rischio
di inserimento rovesciato e richiede attenzione nel
caso debbano essere collegate due unità (master/
slave) allo stesso cavo: vedere la puntata sul sistema IDE per i dettagli. Il cavo S-ATA è piccolo, di colore rosso, e ha un connettore fortemente asimmetrico con cui tale rischio è praticamente azzerato.
Installare un secondo disco rigido
o un CD ROM
La procedura per l’installazione fisica di una unità
di memoria di massa, sia essa un hard disk o un’unità ottica (lettore o masterizzatore) è semplice. Gran
parte dei passi elementari da seguire è comune ai
due casi.
• Nel caso di un’unità ottica è necessario che lo sportello possa affacciarsi sul frontale del PC. Per questo, se il vano prescelto per l’installazione non era
già aperto ed esposto, occorrerà asportare il pannello che copre il frontale. In quasi tutti i cabinet
lo smontaggio del pannello si effettua divaricando
leggermente i ganci di fissaggio con un cacciavite,
uno alla volta.
• Nel caso di dispositivi IDE P-ATA, identificare il
cavo piatto al quale si collegherà l’unità. Occorre che abbia un connettore libero posizionato in
modo tale da poterlo collegare al drive nella posizione in cui sarà installato. Se il cavo è provvisto
di due connettori per periferiche, e sull’altro connettore si attesta già un altro drive, occorre verificare se tale unità è impostata come master, slave o cable select. Spazio permettendo, questo si
PC Open 120 Dicembre 2007
Lezione 9
31
IT administrator - Hardware
purtroppo se l’audio è integrato su motherboard
non sempre il cavetto è fornito. Fortunatamente i
masterizzatori interni in confezione Retail hanno
spesso in dotazione minuteria di fissaggio e cavetteria, incluso il cavo in oggetto.
Una volta installata fisicamente l’unità occorre
provvedere a informare il BIOS della sua presenza
nel sistema. Nel caso in cui l’unità installata fosse
un hard disk, l’operazione va poi completata provvedendo al partizionamento e alla formattazione:
per queste operazioni fare riferimento alle procedure descritte nella VII puntata.
Installare schede d'espansione
supplementari
•
•
•
•
•
•
può verificare esaminando il posizionamento dei
jumper di configurazione sul retro dell’unità, dove
dovrebbero essere anche presenti, stampigliate,
le indicazioni per interpretarlo. In alternativa, per
esaminare più comodamente i jumper, può essere
preferibile allentare le viti di fissaggio dell’unità
per farla scorrere fino a esporre in posizione più
evidente i jumper e le istruzioni. Una terza possibilità è quella di avviare il PC, entrare nel BIOS
ed esaminare le impostazioni delle unità IDE identificando, fra esse, quelle del drive in questione.
Una volta chiarita l’impostazione dell’altra unità
eventualmente presente sullo stesso cavo, impostare i jumper sul nuovo drive in modo complementare: slave se l’altra unità era master, master
se era slave; in alternativa, entrambe le periferiche
devono essere impostate come Cable Select (se il
cavo supporta questa impostazione).
Nel caso di dispositivi IDE con interfaccia S-ATA,
ogni unità è collegata “in esclusiva” con un cavo
punto-punto a una presa del controller su motherboard o su scheda PCI. Non si pone quindi la questione di dispositivi multipli sullo stesso cavo piatto e non esistono i ruoli Master, Slave e Cable Select.
Se il vano è da 5.25” e vi si deve installare un hard
disk da 3.5”, occorre munirsi di staffe di montaggio oppure di un cassetto 5.25” con vano interno
da 3.5”: il drive andrà fissato alle staffe o all’interno
del cassetto (figura 31) e il tutto andrà poi fissato
nel vano da 5.25”.
Inserire il drive nel vano e fissarlo con quattro viti.
In alcuni cabinet è fornita una “provvista” di viti,
avvitate in apposite sedi posizionate in vari punti
dell’interno. Alcuni cabinet con sistema di sgancio rapido non usano viti per il fissaggio vero e
proprio, ma solo come perni per le guide di scorrimento. In questo caso l’unità viene bloccata in sede agendo su una leva.
Collegare un connettore di alimentazione Molex 4
poli (per dispositivi IDE P-ATA) o un connettore di
alimentazione miniatura (per S-ATA). Se l’alimentatore non è provvisto di uscite S-ATA occorrerà un
cavetto adattatore Molex-SATA.
Collegare il cavo IDE (P-ATA o S-ATA) precedentemente identificato.
Solo per masterizzatori, e solo se la scheda grafica
supporta l’ingresso diretto ed è provvista dell’apposito connettore, collegare l’uscita audio interna
dell’unità ottica alla presa AUX o CD della scheda
grafica (se l’audio è integrato su motherboard il
connettore si troverà su quest’ultima, in posizione
indicata sul manuale). Questo collegamento permette di ascoltare un CD inviando l’uscita audio al
sistema di diffusori usato normalmente per tutti i
suoni del sistema. Il cavetto è normalmente fornito con le schede audio e non con i masterizzatori;
L’installazione di schede di espansione sul bus di
sistema è un’operazione semplice in sé, ma al pari di
qualsiasi intervento da effettuare all’interno del sistema richiede maggiore attenzione rispetto al collegamento di una periferica esterna. Accanto alle istruzioni del produttore, che devono essere sempre seguite
scrupolosamente, riportiamo una procedura di riferimento generale e alcune prescrizioni da tenere comunque presenti come misure prudenziali.
• Spegnere il PC e scollegare il cavo di alimentazione
prima di aprire il case.
• Durante l’installazione, utilizzare un braccialetto
antistatico o toccare frequentemente lo chassis
metallico del PC per scaricare l’elettricità statica
prima di un suo eccessivo accumulo
• Tenere la scheda nella sua busta protettiva fino all’ultimo momento e nell’estrarla evitare di toccare
i chip e le piste circuitali, ma tenerla per i bordi o
per la staffa metallica del pannello posteriore.
Per quanto riguarda l’installazione vera e propria,
• Prima di iniziare consultare il manuale del produttore. Se è richiesto un driver ed è prescritto di installarlo prima di effettuare l’installazione fisica
della scheda, provvedere.
• Se la scheda è destinata a sostituirne un’altra già
presente e già configurata per l’uso da parte di
Windows, prima di procedere con la sostituzione
e prima di rimuovere quest’ultima è consigliabile
effettuarne la disinstallazione dal Pannello di Controllo, sempre che non si tratti di una scheda grafica.
• Identificare il tipo di slot necessario (AGP e relativa
velocità 1x/2x/4x/8x, PCI-X, PCIe e relativa larghezza di canale: x1 – x4 – x16)
• Alcune schede occupano due slot adiacenti a causa del loro spessore elevato (per esempio in caso di sistemi di dissipazione particolarmente ingombranti). Tenerne conto nello scegliere lo slot.
Potrebbe essere necessario spostare una scheda
adiacente su uno slot diverso per creare lo spazio
necessaro.
• Nel caso di slot AGP verificare che la tensione di
funzionamento (3.3 V, 1.5 V, 0.8 V) supportata dalla scheda sia compatibile con le tensioni di lavoro supportate dalla scheda madre per lo slot prescelto. Consultare a tale proposito il manuale della scheda madre oppure, se non più disponibile,
identificare il modello di scheda madre e consultare le informazioni tecniche reperibili sul sito del
produttore.
• Se la scheda richiede una connessione diretta all’alimentatore per ricevere alimentazione supplementare (come avviene per alcune schede grafiche
ad alte prestazioni) verificare che nel cabinet sia
ancora disponibile un cavo di alimentazione sufficientemente lungo per raggiungere la zona dello
PC Open 121 Dicembre 2007
1.14.1.3 Essere in
grado d'installare
schede d'espansione
supplementari,
quali: schede audio,
schede d'interfaccia
di rete e così via
Fig. 31 - Per
l’installazione di unità da
3.5” in sedi da 5.25” è
necessario procurarsi un
telaio meccanico come
questo. Prima si fisserà
il disco al telaio e poi
questo al case
IT administrator - Hardware
slot in cui si installerà la scheda e che abbia il connettore di tipo adatto. Se ci sono cavi sufficienti,
ma non con il connettore adatto, procurarsi un
adattatore (a volte è fornito con la scheda stessa).
Se non ci sono cavi sufficienti procurarsi un cavetto sdoppiatore per creare una derivazione da un
altro cavo di alimentazione già collegato.
• Asportare la vite che blocca in sede la staffa di copertura posteriore dello slot in cui si installerà la
scheda. Evitare che la vite o la staffa metallica cadano sulla motherboard, potrebbe causare un cortocircuito fra piste tenute sotto tensione da condensatori ancora carichi con la possibilità di provocare danni. Se occorre rimuovere una scheda
eventualmente presente in precedenza nello slot,
evitare che cada accidentalmente sulla motherboard: l’urto di uno spigolo con una pista o la caduta su un componente non a montaggio superficiale potrebbero provocare danni.
• Nell’inserimento della nuova scheda prestare attenzione al corretto allineamento anzitutto della
staffa posteriore e poi a quello del connettore rispetto allo slot. Far scendere la scheda in sede
esercitando alternativamente leggere pressioni sui
due lati. Al termine verificare che la staffa posteriore si trovi alla stessa quota del profilo posteriore su cui si impegnano le viti di fissaggio. Se
l’inserimento risulta contrastato, non esercitare
mai un’eccessiva pressione sulla scheda: potrebbe danneggiarsi la motherboard. Controllare invece se l’allineamento del connettore non è perfetto
o se lo slot è di tipo sbagliato.
• Fissare la scheda con la vite precedentemente
asportata dallo slot. Prestare attenzione per evitare l’eventuale caduta accidentale della vite sulla
motherboard.
• Se la scheda lo richiede, collegare il cavo di alimentazione supplementare.
• Oltre alle prese montate sulla staffa posteriore, alcune schede dispongono di un pannello connessioni supplementare separato, collegato alla scheda da un apposito cavo. A seconda dei modelli, il
pannello potrebbe essere montato come staffa posteriore su un altro slot, oppure in un vano frontale
per unità disco. Provvedere al montaggio in sede
e al collegamento alla scheda, da effettuarsi con i
cavi forniti in dotazione.
• Chiudere il cabinet, ricollegare il cavo 220 V e accendere il PC.
• Windows dovrebbe rilevare automaticamente il
nuovo hardware. Se non lo si è già fatto prima dell’installazione fisica, potrebbe essere richiesto inserire il disco driver fornito dal produttore.
1.14.1.4 Essere in
grado d'installare
un modem o altre
apparecchiature di
comunicazione
1.14.1.5 Essere in
grado d'installare
un dispositivo con
connessione wireless
Installare un modem o altre apparecchiature
di comunicazione
Il montaggio di un modem interno segue le procedure descritte nella sezione precedente.
Modem esterni (sia di tipo V.90 per normale dialup telefonico 56K, sia di tipo ADSL) si collegano senza
agire all’interno del PC. I modem 56K si collegano via
porta seriale o, più raramente, via USB; quelli ADSL si
collegano via USB o, più raramente, via Ethernet.
Il collegamento fisico nel caso USB deve a volte essere preceduto, e non seguito, dall’installazione del
driver sotto Windows: a tale riguardo consultare la
documentazione.
Non sottovalutare questo aspetto in quanto, in rari casi, l’aver collegato la periferica Plug and Play
prima di aver installato il software può far entrare in
una situazione difficilmente reversibile e impedire
di completare con successo l’installazione della pe-
PC Open 122 Dicembre 2007
Lezione 9
riferica. In questi casi si può tentare dal Pannello di
controllo di rimuovere la periferica e ripetere la procedura, ma non sempre tale operazione di “bonifica”
ha successo. In casi davvero estremi l’unica cura per
poter ripetere con successo l’installazione secondo
la procedura è reinstallare Windows, un’operazione
che non richiede conoscenze particolari ma che comporta un enorme spreco di tempo, oltre a richiedere
di effettuare il backup di tutti i dati. La situazione è
complicata dal fatto che altri produttori prescrivono
l’esatto contrario, ossia le istruzioni richiedono di
installare la periferica e inserire il disco con i driver
solo successivamente, quando Windows lo richiede.
Fare quindi sempre riferimento alla procedura riportata sulla documentazione del produttore.
Nel caso di installazione con collegamento Ethernet il “rischio plug and play” non esiste; è solo importante verificare che le impostazioni di rete siano
effettuate come prescritto dalle istruzioni. Nella quasi totalità dei casi si devono abilitare le opzioni Ottieni automaticamente un indirizzo IP e Ottieni indirizzo
server DNS automaticamente” nelle proprietà TCP/IP
dell’adattatore di rete a cui si collega l’unità esterna.
Occorre poi creare una connessione dial-up a larga
banda che ne faccia uso, seguendo il wizard di Windows / Pannello di Controllo /Connessioni di rete, oppure usando il disco con procedura facilitata automatica che molti produttori forniscono in dotazione sia
con prodotti Ethernet sia con prodotti USB.
Nel caso specifico dei modem non ADSL, generalmente di tipo 56K v.90, nel Pannello di Controllo esiste una apposita sezione Opzioni modem e telefono
con cui è possibile impostare prefissi telefonici, numeri di uscita dal centralino per la rete esterna e così via; ovviamente tali impostazioni non hanno senso
nel caso dell’ADSL.
L’installazione dei modem ADSL richiede quasi
sempre di inserire un filtro fra la presa telefonica e
il cavo di collegamento al modem: in caso contrario
il traffico dati generato dal modem provocherebbe
fastidiosi disturbi udibili durante la telefonata. In genere il filtro è fornito con il modem ma è possibile reperirlo nei negozi specializzati. I modem ADSL G.lite
a basse prestazioni usano una porzione di banda più
ristretta generando così una minor quantità di disturbi nello spettro udibile, tuttavia è comunque consigliabile usare un filtro.
Per effettuare il test della connessione occorre tenere a portata di mano le informazioni di accesso
fornite dall’Internet Provider: username, password
e, nel caso di modem 56K, anche il numero di telefono da chiamare.
Installare un dispositivo
con connessione wireless
Gli adattatori di rete wireless esistono in vari formati a seconda del tipo di PC (desktop o laptop) e
del tipo di collegamento: USB, PCI, PCMCIA, ExpressCard.
Per l’installazione fisica nel caso PCI fare riferimento alle procedure generali sopra descritte. Per USB,
PCMCIA ed ExpressCard l’installazione fisica non pone problemi particolari, ma prestare attenzione alla
sequenza corretta di installazione di software e hardware, secondo le prescrizioni del produttore.
Tutte le schede wireless sono corredate di un disco con il driver, ma in alcuni casi il produttore va oltre e fornisce anche un programma di gestione e configurazione alternativo rispetto al supporto nativo
presente in Windows a partire da XP Service Pack 2.
Sconsigliamo, almeno in prima battuta, di utilizzare l’utility proposta dal produttore, a meno che deter-
Lezione 9
minate funzioni speciali di cui si ha realmente necessità risultino accessibili soltanto attraverso essa. Se
non è possibile scegliere se installarla o meno perché
installata dalla stessa procedura che installa il driver,
consigliamo di disattivarla alla prima occasione.
Una volta installato l’adattatore con il relativo driver, se ci si trova in presenza di una o più reti wireless Windows le rileverà automaticamente. Se è attiva
una utility di gestione proprietaria, ciò che accade e
le segnalazioni che si ottengono a video possono variare caso per caso: fare riferimento alle istruzioni
del produttore.
Nel caso si usi la gestione standard di Windows
sulla task bar compare un’indicazione che segnala
la presenza di reti wireless. Facendo clic sul messaggio appare la videata di gestione delle reti wireless,
in cui viene riportato un elenco delle reti identificate
dal loro nome (più propriamente detto SSID). Le reti
protette sono contrassegnate da un’icona a forma di
lucchetto: per collegarvisi occorre conoscere la relativa password.
Installare e configurare un adattatore bus host
SCSI e relativi dispositivi SCSI
L’installazione di un controller SCSI e il collegamento ad esso di dispositivi SCSI sono operazioni
concettualmente non molto diverse dalle analoghe
attività in campo IDE. I dettagli pratici differiscono
per il cablaggio, le varianti di standard, il numero di
periferiche collegabili, la terminologia.
Per una introduzione completa alla tecnologia
SCSI e alle sue prestazioni, alla terminologia ed all’identificazione dei vari attori (host adapter, SCSI
ID, LUN, Terminatore), ai diversi standard esistenti, alle questioni concernenti cablaggi e dispositivi di terminazione e per informazioni riguardanti la
numerazione delle periferiche e l’impostazione del
loro identificativo, fare riferimento alla V puntata
del corso.
Ogni periferica SCSI dispone di una modalità fisica o logica per impostare lo SCSI ID (figura 32): a
seconda dei modelli, della versione dello standard
supportato e delle scelte del produttore ci si può
trovare a dover agire su jumper (ponticelli), DIP
Switch (file di microinterruttori) o commutatori rotanti, oppure via programma di gestione. Data la
grande variabilità di soluzioni tecniche in questo
campo rimandiamo alla documentazione del produttore per indicazioni pratiche sulla localizzazione
del commutatore e sulla procedura da seguire per
regolarlo. Due prescrizioni generali devono però essere tenute ben presenti: evitare assolutamente di
impostare con lo stesso SCSI ID due dispositivi di
una stessa catena SCSI, e nel caso di commutatori
meccanici/elettronici evitare di variare lo SCSI ID a
dispositivo e controller accesi.
L’installazione del controller (“host adapter”, nella terminologia SCSI) sul bus di sistema richiede la
procedura già descritta. Esistono anche host adapter con collegamento USB, piuttosto rari; la loro installazione è naturalmente molto più semplice e non
richiede di spegnere né aprire il PC, ma è importante
seguire scrupolosamente le indicazioni del produttore, in particolar modo per quanto riguarda l’esatta sequenza di installazione hardware/software/driver.
Una volta installato il controller nel sistema si
può procedere al collegamento delle periferiche; il
giusto tipo di cablaggio da usare dipende da numerosi fattori, dalla versione di standard SCSI usato,
all’eventuale necessità di terminatore (e relativo tipo), al fatto che l’unità da collegare sia interna o
IT administrator - Hardware
32
Fig. 32 - L’impostazione
dello SCSI ID sulle
periferiche SCSI può
avvenire in modo
meccanico, per
esempio azionando un
permutatore rotante o
spostando dei jumper
secondo un certo
schema come nel caso in
figura. In dispositivi più
moderni l’operazione si
può effettuare mediante
una interfaccia di
configurazione
esterna, fino ad eventuali varianti per quanto riguarda il connettore (normale o miniaturizzato). Perché l’insieme controller-cavo-periferica possa funzionare è certamente necessario che vi sia almeno
una versione di protocollo in comune fra l’insieme
di standard supportati dal controller e quello degli
standard supportati dall’unità da collegare, ma assicurato questo è ancora necessario reperire il cavo adatto (e l’eventuale terminatore), rivolgendosi
a negozi specializzati.
Una volta effettuate l’installazione fisica di controller, cavo e periferica, e l’installazione dei driver
e della utility di configurazione (se fornita, in caso di
controller add-on), si può passare alla configurazione logica dei dispositivi sulla catena SCSI, analogamente a quanto si deve fare per configurare i dispositivi master e slave su una catena IDE P-ATA. Questa configurazione si effettua usando una utility di
configurazione SCSI: se il controller SCSI è integrato
su motherboard, la relativa utility sarà accessibile
dal BIOS. Negli altri casi vi si accederà da Windows,
usando un’applicazione fornita a corredo.
La principale differenza fra la configurazione di
una catena IDE P-ATA e quella di una catena SCSI sta
nel fatto che P-ATA supporta al massimo due unità
per catena, mentre SCSI, a seconda delle versioni
dello standard, ne supporta molte di più: 7, 15 o anche valori più alti, con le ultime evoluzioni.
L’impostazione dei jumper IDE Master/slave/cable select sul retro dei drive IDE (figura 33) corrisponde, da un punto di vista concettuale, all’impostazione dello SCSI ID sui dispositivi SCSI (che possono anche non essere delle unità disco, ma anche
scanner, periferiche di backup e altro).
Il riconoscimento delle periferiche collegate alla
catena che si fa nell’utility IDE del BIOS è analogo all’operazione che si effettua nella utility per SCSI, con
la differenza già citata che il numero di periferiche
per catena è maggiore. L’aspetto a cui prestare attenzione, esaminando la tabella degli SCSI ID rilevati
dalla utility, è l’eventuale presenza di conflitti dovuti
a periferiche con lo stesso SCSI ID: ne apparirà una
sola, oppure il controller potrebbe segnalare errori.
33
PC Open 123 Dicembre 2007
1.14.1.6 Essere in
grado d'installare
e configurare un
adattatore bus
host SCSI e relativi
dispositivi SCSI.
Essere inoltre in
grado d'installare e
configurare ulteriori
periferiche, quali:
scanner, stampanti,
dispositivi esterni di
backup ecc.
Fig. 33 - Nel caso
dei dispositivi IDE
l’equivalente logico dello
SCSI ID è rappresentato
dall’impostazione del
ruolo master o slave
per i dispositivi che
si attestano su uno
stesso canale. E’ anche
disponibile la modalità
cable select in cui il ruolo
è stabilito dalla posizione
di collegamento sul cavo
IT administrator - Hardware
1.14.1.7 Essere in
grado d'installare e
configurare schede
controller addizionali,
per dischi
normali e dischi
RAID.
1.14.1.8 Essere in
grado d'installare un
impianto di rete
In questo caso, spegnere il PC, correggere lo SCSI ID
di uno dei dispositivi in conflitto e riprovare.
Installare e configurare schede controller
addizionali, per dischi normali e dischi RAID
Tutte le motherboard PC integrano uno o più controller IDE sufficienti a gestire un certo numero di
canali P-ATA e/o S-ATA, a seconda delle configurazioni, e quindi sono in grado di collegare diverse
unità disco.
In passato lo standard era una dotazione di due
canali P-ATA, per un totale di quattro unità IDE; tenendo conto del fatto che almeno un disco fisso e
una unità ottica erano sempre presenti, la capacità
disponibile per espansioni era limitata: si potevano
aggiungere al massimo due unità.
Con l’avvento delle motherboard dotate di controller S-ATA (spesso abbinati con almeno un canale P-ATA per motivi di retrocompatibilità con l’hardware precedente) le cose sono migliorate, ma non
di molto: è vero che alcuni modelli sono provvisti di
un buon numero di connettori S-ATA, in diversi casi
anche 4 o 6, però per le caratteristiche della tecnologia S-ATA a ogni connettore si può attestare una
sola unità, a differenza dello standard P-ATA in cui
su ogni cavo se ne possono collegare due.
Quindi una motherboard in cui anziché i due
classici canali P-ATA troviamo 4 connettori S-ATA e
un connettore P-ATA si possono gestire al massimo
6 unità IDE totali: un modesto passo avanti. Se il PC
deve essere usato in applicazioni in cui serve una
elevata capacità di memorizzazione, e magari una
garanzia di elevata di disponibilità dei dati ottenibile solo con schemi RAID, ecco che il numero di unità disco da installare supera facilmente il numero di
dischi gestibili direttamente dalla motherboard.
La soluzione è installare uno o più controller addizionali su scheda PCI o PCIexpress. Un controller
può aggiungere canali IDE P-ATA, canali S-ATA o una
combinazione di entrambi. Inoltre molti modelli incorporano la capacità di supportare schemi RAID,
grazie ai quali si possono ottenere maggior sicurezza, maggiori prestazioni o entrambe.
Per una descrizione degli schemi RAID e delle loro indicazioni d’impiego si veda la VI puntata.
L’installazione del controller addizionale richiede due passi: l’installazione fisica della scheda sul
bus di sistema, che avviene secondo le modalità generali già descritte, e la configurazione logica delle
unità disco collegate.
Poiché il controller non è integrato su motherboard e il suo programma di controllo e configurazione non fa parte del BIOS, la configurazione non
avviene all’accensione del PC ma il produttore fornisce i driver e una utility di gestione utilizzabili
sotto Windows oppure Linux.
Va detto che entrambi i sistemi operativi sono
anche in grado di emulare in software almeno gli
schemi RAID più semplici (per esempio RAID 0, 1 e
5), altrimenti ottenibili solo investendo in controller dedicati hardware.
Apposite utility di configurazione, del tutto analoghe a quelle che gestiscono i controller hardware, consentono di creare gruppi RAID definendo il
tipo di schema, la popolazione delle partizioni “partecipanti” e l’unità disco logica da creare, per poi
formattarla. Nelle immagini vediamo, per esempio,
la procedura da seguire sotto Linux per creare e
gestire un gruppo RAID usando l’utility Disk Druid.
Anche Windows supporta il software RAID con il
concetto di “dischi dinamici”, configurabili dalla
Gestione Disco.
PC Open 124 Dicembre 2007
Lezione 9
Come installare
un impianto di rete
Nella IX puntata abbiamo fatto la conoscenza con
gli attori che partecipano direttamente a una rete:
schede di rete (nei vari formati disponibili: USB,
PCI, PCMCIA, ExpressCard), cablaggi (in rame, in
fibra ottica, su rete elettrica e.. wireless, via etere),
apparati attivi (hub, switch, router, access points,..), i dispositivi NAS (Network Attached Storage)
e naturalmente i PC. Abbiamo inoltre discusso le
varie topologie di rete (a bus, ad anello, a stella),
le peculiarità delle reti wireless e i dispositivi che
collegano la rete locale a Internet: router e modem
a larga banda per ADSL, fibra ottica o GPRS/EDGE/
UMTS.
Mentre per l’installazione dei singoli apparati
della rete si può fare riferimento alle istruzioni fornite dal produttore e alle nozioni di base descritte
nelle varie puntate di questo corso, dal punto di vista della progettazione della rete nel suo complesso occorre prestare attenzione a vari aspetti se si
vuole ottenere un buon risultato.
Inoltre, un’attenzione non inferiore dovrebbe essere riservata all’evoluzione della rete. Infatti, dopo un primo passo che consiste nel creare l’infrastruttura minima – un modem broadband o router,
uno switch eventualmente integrato con il modem,
le schede di rete e i cablaggi per i primi PC collegati
alla LAN – successivamente è tipico dover collegare
altri PC, dischi di rete o stampanti su LAN, oppure
aggiungere alla rete di base la capacità wireless.
La fase di evoluzione della rete è più delicata di
quella di installazione iniziale anche perché introducendo a più riprese nuovi dispositivi senza la dovuta attenzione e coordinazione, si rischia di creare
squilibri di tecnologia o di topologia e di introdurre
incompatibilità o inefficienze. Se la rete cresce inseguendo le nuove necessità in modo più o meno
casuale, appoggiandosi a un’ossatura di base dimensionata per un traffico ridotto e organizzata per
una distribuzione di traffico differente, il risultato
potrà essere una LAN poco affidabile e con prestazioni scadenti, perfino a fronte di investimenti significativi.
Discutere i criteri di dimensionamento e progettazione delle LAN richiederebbe troppo spazio, oltre a esulare dagli scopi di questo corso, ma è importante fornire alcune linee guida.
Le aree a cui dedicare uno studio accurato sono
quella della sicurezza della rete e quella della sua
struttura e tecnologia, che insieme ne condizionano
le prestazioni e l’affidabilità.
Per quanto riguarda la sicurezza si deve tassativamente provvedere a proteggere la rete da attacchi dall’esterno. Se la rete è esclusivamente di tipo
wired, questo si può ottenere installando un router
con capacità di firewall, e per misura di rinforzo si
possono installare dei firewall software anche sui
vari PC della rete.
Inoltre, pur in presenza di queste misure di sicurezza esterne e interne, è sempre assolutamente indispensabile antivirus e antimalware/antispyware
su tutti i PC, per evitare che l’infiltrazione per altra
via di minacce all’interno della “fortezza” aggiri le
difese perimetrali vanificandone l’efficacia.
Anche se la rete è protetta da firewall, infatti, uno
spyware installato su uno dei PC della rete funziona come cavallo di Troia e, approfittando del pieno
accesso alla rete locale di cui può disporre, e della
possibilità di uscire verso Internet, può trasmettere all’esterno informazioni riservate, collegarsi a siti da cui ricevere ordini da eseguire sulla rete (dif-
Lezione 9
fondere virus, cancellare file da server di rete,…)
e così via.
Se la rete comprende anche un access point wireless, è assolutamente indispensabile attivare la protezione crittografica al più alto livello compatibile
con le capacità dei terminali usati (alcuni vecchi
PDA non supportano altro che l’ormai obsoleto protocollo WEP, impedendo di fatto di utilizzare i più
recenti e sicuri WPA e WPA2).
Non farlo sarebbe come costruire un castello
protetto da spesse e alte mura e lasciare poi spalancato il ponte levatoio.
Dal punto di vista delle prestazioni si deve badare a due aspetti complementari: la tecnologia di rete usata e la struttura della rete.
La prima determina solo il limite massimo teorico di prestazioni raggiungibile sulla LAN, nell’ipotesi che la topologia di rete sia stata progettata in modo ideale, senza congestioni né colli di bottiglia.
La seconda determina l’affidabilità e disponibilità della rete (in funzione della sua vulnerabilità a
guasti singoli) e il grado di sfruttamento delle prestazioni.
Una rete realizzata anche con notevoli investimenti e che utilizza apparati attivi e cablaggi all’ultimissimo grido può funzionare male e sprecare
gran parte del suo potenziale se strutturata in modo inopportuno.
Occorre quindi prestare attenzione a non strutturare la rete in modo tale che gran parte delle stazioni si trovino a condividere un’unica connessione verso il resto della LAN: tale tratta diventerebbe
immediatamente il collo di bottiglia.
Soprattutto i file server e le stampanti, che “attirano” molto traffico sul proprio troncone di rete, dovrebbero essere collegate allo switch o router con un link dedicato. In generale è da preferire
la topologia a stella e non si dovrebbe fare uso di
economici hub in quanto, replicando inutilmente il
traffico su tutte le linee collegate, non ottimizzano
lo sfruttamento di banda.
Per le tratte WiFi si deve tener conto del fatto
che l’access point seleziona il modo di funzionamento in base alla velocità del terminale più lento.
Da questo punto di vista ha un effetto simile a quello di un hub. Quindi è perfettamente inutile acquistare attrezzatura allo stato dell’arte per il wireless
gateway se uno o più terminali sono degli antiquati
802.11b da 11 Mbps.
Occorre armonizzare i dispositivi che partecipano alla rete.
A titolo d’esempio vediamo infine, per sommi capi, la procedura da seguire per installare una LAN
wired (con uscita su Internet via ADSL) composta
da 2 postazioni PC A e B e una stampante USB condivisa via rete, collegata al PC A.
• Individuare la posizione ideale per il modem/router ADSL vicino a una presa telefonica e a una
presa 220V. Installare il filtro ADSL, alimentare il
modem/router ed effettuare la connessione alla
linea.
• Collegare due cavi di rete UTP cat.5 a due porte
Ethernet del modem/router ai due PC.
• Verificare che i due PC siano impostati per ricevere automaticamente l’indirizzo e controllare
che abbiano ottenuto indirizzi diversi usando il
comando IPCONFIG.
• Da uno dei due PC collegarsi al modem/router secondo le istruzioni fornite dal produttore e configurare la connessione ADSL secondo le informazioni fornite dall’ISP.
• Sul PC A condividere via rete la stampante loca-
IT administrator - Hardware
34
le utilizzando l’apposta funzione del Pannello di
Controllo.
• Configurare la stampante remota sul PC B ed effettuare una stampa di prova.
Per il funzionamento dei vari PC sulla rete è necessario che a ognuno di essi sia attribuito un indirizzo univoco.
Questo può essere fatto staticamente, con procedura manuale (figura 34), oppure dinamicamente,
in modo automatico, grazie al protocollo DHCP. In
quest’ultimo caso, sulla rete deve esistere un server DHCP attivo. In genere i modem ADSL e i router
ne contengono uno che può essere attivato agendo
sull’interfaccia di controllo del dispositivo. L’assegnazione manuale è un’operazione che può provocare errori se a due o più PC dovesse erroneamente
venire attribuito lo stesso indirizzo. In questo caso
si verificherebbero anomalie sulla rete, in quanto,
innanzitutto, non sarebbe chiaro a quale sistema
debbano essere recapitati i pacchetti: i sistemi Windows rilevano questa circostanza e la segnalano
con appositi messaggi che non devono mai essere
ignorati.Per condividere l’uscita su Internet fra tutti i PC della rete è necessario un router/gateway in
grado di assegnare indirizzi individuali alle macchine all’interno della LAN, mentre all’esterno ne acquisirà uno singolo per sé; ogni connessione aperta
da un PC verso Internet verrà “trasformata” in modo che all’esterno appaia come una connessione
instaurata dal router stesso.
Nella direzione contraria, i pacchetti di dati ricevuti in risposta saranno da questo ritrasformati
e mandati ai PC di pertinenza. Questa funzione si
chiama Network Address Translation (NAT). Oltre
che da un router/gateway, il ruolo di macchina con
funzioni NAT può essere svolto da un PC; allo scopo, sotto Windows è disponibile la funzione Condivisione accesso a Internet.
PC Open 125 Dicembre 2007
Fig. 34 - L’indirizzo del
PC può essere impostato
manualmente, come in
figura, oppure essere
ricevuto da un server
DHCP (si tratta di una
funzione generalmente
presente negli access
point e nei router).