Prova scritta di fine corso di Meccanica Applicata alle Macchine, modulo da 5CFU
1
1
DUCK DONALD 00000001
Dalle iniziali del proprio cognome e del proprio nome l’allieva/o ricavi due numeri α e β utilizzando
l’alfabeto anglosassone (esempi: DUCK, DONALD ⇒ α = 4, β = 4, PAOLINO, PAPERINO ⇒ α = 16,
β = 16). I valori numerici di α e β saranno largamente utilizzati nel compito.
α = iniziale del cognome = 4
·
¸
a b c d e f g h i j
k
l m n o
p
q
r
s
t
u v w x y
z
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26
β = iniziale del nome (primo nome) = 4
·
a b c d e f g h i j
k
1 2 3 4 5 6 7 8 9 10 11
1.1
1.1.1
l
12
m
13
n
14
o
15
p
16
q
17
r
18
s
19
t
20
u
21
v
22
w
23
x
24
y
25
z
26
Sistemi dinamici nello spazio di stato
Sistema LTI (2 punti)
Un sistema dinamico si dice LTI (Lineare Tempo-Invariante) o LS (Lineare Stazionario) quando:
¤ la derivata temporale del vettore di stato è lineare rispetto al vettore d’ingresso;
¤ la derivata del vettore di stato è lineare rispetto allo stato e rispetto all’ingresso e le relative matrici
sono variabili nel tempo;
¤ la derivata temporale del vettore di stato è lineare rispetto al vettore d’ingresso;
¤ altro (aggiungere) . . .
Nessuna delle risposte preconfezionate è adeguata. Un sistema dinamico si dice LTI (o LS) quando la
derivata temporale del vettore di stato è lineare rispetto allo stato e rispetto all’ingresso e le relative matrici
sono costanti nel tempo
1.1.2
Stabilità di un sistema LS (2 punti)
Un sistema LS autonomo governato dalle equazioni:
½
ẋ = Ax
y = Cx
,
è asintoticamente stabile nel punto x = 0 se:
¤ gli autovalori di A sono tutti reali;
¤ gli autovalori di A sono tutti reali e positivi;
¤ gli autovalori di A hanno tutti parte reale negativa;
¤ gli autovalori di A sono tutti reali e negativi;
¤ altro (aggiungere) . . .
Condizione necessaria e sufficiente affinché un sistema LTI autonomo sia asintoticamente stabile nell’origine è che i suoi autovalori abbiano tutti parte reale negativa.
¸
1 DUCK DONALD 00000001
1.1.3
2
Ancora sulla stabilità (8 punti)
Dato un sistema LS autonomo come nell’esercizio precedente, in cui:
·
¸
0
1
A =
,
−α −(β − 10)
discutere la stabilità dell’equilibrio nell’origine.
·
Per il nostro Donald Duck α = β = 4, quindi la matrice A vale
0 1
−4 6
¸
Gli autovalori si calcolano
trovano gli zeri
caratteristico, ovvero di
¯
¯ del polinomio
¯ s −1 ¯
¯ = s2 −6s−4. Anche senza calcolare le radici del polinomio, visto che i coefficienti
det(sI −A) = ¯¯
4 s−6 ¯
hanno una variazione ed una permanenza di segno, esisterà una radice di parte reale positiva ed un’altra di
parte reale negativa. A conferma di ciò, la parabola y = s2 − 6s − 4 ha la concavità rivolta verso l’alto e per
s = 0 incontra l’asse y nel punto (0, −4) e poi, salendo verso il cielo (y −→ +∞), incontrerà sia il semiasse
(reale!) negativo che quello positivo. Se poi, in un eccesso di solerzia, calcoliamo le radici, otteniamo:
sµ
¶2
√
−6
−6
s = −
±
+ 4 = 3 ± 13 ,
|{z}
2
2
>3
da cui è evidente che una delle radici ha parte reale positiva =⇒ il sistema è instabile.
Se invece il compagno di banco di D.D. ha α = qualsiasi, β = 10, la sua matrice vale
·
¸
0
1
A =
,
−qualsiasi 0
√
da cui risulta che il polinomio caratteristico (s2 + qualsiasi) ha radici immaginarie pure s = ±j qualsiasi.
Il sistema è marginalmente stabile nell’origine (non asintoticamente).
È facile verificare che se β > 10 il sistema è asintoticamente stabile.
1.2
1.2.1
Costante di tempo meccanica di un motoriduttore
Motoriduttore con motore elettrico DC (8 punti)
Un sistema elettromeccanico è composto da un motore a corrente continua ad eccitazione permanente, da
un riduttore con rapporto di riduzione 1 : N , con N = αβ e da un volano con momento d’ inerzia pari a
100 volte quella del rotore del motore DC. Trascurando l’inerzia del riduttore, calcolare la costante di tempo
meccanica del motore dopo che questo è stato collegato al sistema riduttore + volano.
La costante di tempo meccanica del motore (non collegato al riduttore-carico inerziale) vale:
τm
=
Ra Ja
ke kt
,
Tutti i parametri elettrici del motore rimangono inalterati dopo il collegamento al riduttore-carico. Ma
l’inerzia rotante cambia (aumenta!) e vale:
Jtot
=
=
1
Ja + 100Ja 2 =
N
µ
¶
100
Ja 1 + 2 2
.
α β
Essendo la costante di tempo meccanica proporzionale
d’inerzia, la nuova costante di tempo
´
³ al momento
sarà pari a quella vecchia moltiplicata per il fattore 1 +
100
α2 β 2
.
1 DUCK DONALD 00000001
1.3
Amplificatori operazionali
1.3.1
Impedenza d’ingresso (3 punti)
3
L’impedenza d’ingresso zin di un amplificatore di tensione ideale deve essere:
¤ 0;
¤ ∞;
¤ pari all’impedenza d’uscita zout .
In un amplificatore di tensione ideale l’impedenza d’ingresso è infinita per non “affaticare” la sorgente del
segnale d’ingresso.
1.3.2
Funzione di trasferimento di un amplificatore operazionale retroazionato (10 punti)
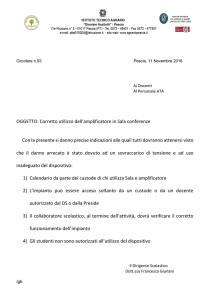
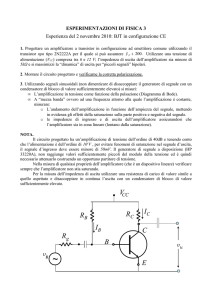
Il circuito mostrato in figura è un amplificatore di tensione non invertente.
Vin
+
Vout
−
R2
R1
Figura 1: Amplificatore in configurazione non invertente.
Dati: R1 = (10 + α)kΩ, R2 = (40 + β)kΩ, Avol =
105
τ s+1 ,
τ = 0.1s. Calcolare:
a)
(2 punti) il guadagno statico dell’amplificatore;
b)
(2 punti) l’ordine di grandezza dell’impedenza d’ingresso;
c)
(6 punti) la funzione di trasferimento d’anello chiuso G(s) =
a)
Il guadagno statico dell’amplificatore vale circa l’inverso del fattore di retroazione β =
R1 +R2
R1
R1 +R2 . Quindi il guadagno statico vale circa
R1
Vout (s)
Vin (s) .
1 DUCK DONALD 00000001
b)
4
l’ordine di grandezza dell’impedenza d’ingresso (quella vista dal segnale d’ingresso) è lo
stesso dell’amplificatore operazionale, quindi qualche milione di M Ω. . .
c)
Y (s)
(1 + βAvol (s))Y (s)
Y (s)
Vin (s)
= Avol (s)(Vin (s) − βY (s))
= Avol (s)Vin (s)
A
=
0
Avol (s)
A0
A0
τ s+1
=
=
=
0
1 + βAvol (s)
τ
s
+
(1
+
βA
)
1
+
βA0
1 + β τA
0
s+1
Quindi l’amplificatore non invertente guadagna staticamente
τ
τ
' βA
<< τ .
di tempo vale τ 0 = 1+βA
0
0
A0
1+βA0
'
1
β
1
τ
1+βA0 s
+1
e la sua costante
Agli esercizi sono complessivamente assegnati 33 punti. Si intende che chi prende 31 o 32 o 33 ottiene
30 e lode come voto finale.
INDICE
5
Indice
1
DUCK DONALD 00000001
1.1 Sistemi dinamici nello spazio di stato . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.1.1 Sistema LTI (2 punti) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.1.2 Stabilità di un sistema LS (2 punti) . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.1.3 Ancora sulla stabilità (8 punti) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2 Costante di tempo meccanica di un motoriduttore . . . . . . . . . . . . . . . . . . . . . . . .
1.2.1 Motoriduttore con motore elettrico DC (8 punti) . . . . . . . . . . . . . . . . . . . . .
1.3 Amplificatori operazionali . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.3.1 Impedenza d’ingresso (3 punti) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.3.2 Funzione di trasferimento di un amplificatore operazionale retroazionato (10 punti)
.
.
.
.
.
.
.
.
.
1
1
1
1
2
2
2
3
3
3