Università degli Studi di Firenze
Facoltà di Scienze Mat., Fis. e Nat.
Corso di Laurea in Fisica
Appunti del corso di Esperimentazioni I
Prof. R. Falciani
Prof. A. Stefanini
Appunti su:
MISURA DEL COEFFICIENTE DI VISCOSITÀ DI UN LIQUIDO
1
1
Introduzione
Il coefficiente di viscosità η di un liquido viene definito fenomenologicamente, nel caso di
un fluido reale, dalla relazione
| F~ |= η S
| v~S |
h
(1)
dove, facendo riferimento alla Fig.1, | F~ | è il modulo della forza che occorre applicare ad
una lastra, di superficie S, parzialmente immersa in un fluido, posto in un recipiente di
profondità h, affinchè si muova con velocità | v~S | costante.
Figura 1:
√
Per evitare “effetti di parete” deve essere S b . Se il fluido “bagna” sia il corpo
che il contenitore (ovvero aderisce ad essi) abbiamo che v(0) = vS e v(h) = 0, dove con
v indichiamo il modulo della velocità del fluido. Se poi l’altezza dello strato (h) è molto
minore delle dimensioni della lastra e la velocità finale della lastra (vS ) non è troppo
grande, il moto del fluido è laminare, ovvero il fluido si muove come se fosse suddiviso in
sottilissimi strati orizzontali sovrapposti che scorrono gli uni sugli altri con velocità diverse.
In tali condizioni si ha quindi una distribuzione uniforme di velocità, come mostrato in
Fig.1, e la (1) vale strato per strato; possiamo perciò scrivere la (1) nella forma
∆v
| F~ |= η S
∆h
Il coefficiente di viscosità η ha quindi dimensioni [m l −1 t−1 ] ed è misurato nel S.I. in
kg m−1 s−1 ( = 1 poiseuille) e nel C.G.S. in g cm−1 s−1 ( = 1 poise = 10−1 poiseuille).
Nei liquidi η diminuisce rapidamente con l’aumentare della temperatura; ad es. per l’acqua si ha una diminuzione relativa del 2.5% nel passaggio da 20 ◦ C a 21 ◦ C.
2
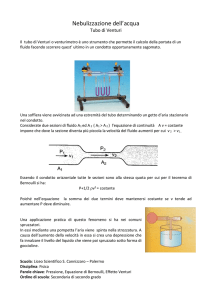
Figura 2:
Se pensiamo di trascinare un corpo di dimensioni trasversali d, totalmente immerso in
un liquido reale di densità ρl e coefficiente di viscosità η, ad una velocità ~v costante, dovremo applicare una forza (vedi Fig.2)
F~v = k η d ~v
(2)
dove k (fattore di forma) è una costante numerica che dipende dalla forma del corpo
(k = 3π per una sfera). La (2) è la cosiddetta legge di Stokes. In essa F~v rappresenta
la forza che si deve applicare al corpo per raggiungere una velocità finale costante ~v e
quindi, avendo raggiunto una condizione di moto uniforme, è uguale ed opposta alla forza
di resistenza viscosa che si oppone al corpo in un fluido reale.
Il regime laminare del moto richiede che non si inneschino vortici attorno al corpo in
movimento; in questo caso dovremmo parlare di moto turbolento, che avviene con forze
di attrito e dissipazione di energia cinetica molto maggiore che nel caso laminare.
Una costante adimensionale utile a discriminare fra le condizioni di moto laminare e quelle
di moto turbolento è la costante di Reynolds
Re =
v d ρl
η
Per Re ≤ 103 si ha un moto laminare (viscoso), per Re ≥ 105 il moto è turbolento.
Ricordiamo che Re può essere pensata come rapporto fra le forze inerziali (∆p/∆t) applicate al corpo in movimento e le forze di attrito causate dalla viscosità del fluido.
Se pensiamo di abbandonare (vedi Fig.3), in un liquido di densità ρl , una sfera di raggio
r e densità ρ (> ρl ), sotto l’azione della gravità, la sfera cadrà per effetto del proprio peso
3
Figura 3:
p, della spinta idrostatica di Archimede s e della forza viscosa Fv con un’equazione di
moto data da
m ρl
m a = p − s − Fv = m g −
g−6 π η r v
ρ
Partendo inizialmente da fermi avremo che, a t = 0, sarà v = 0 e a = (1 − ρρl ) g, ma
a diminuirà con il tempo fino ad annullarsi. Tale condizione viene soddisfatta per una
velocità limite (raggiunta asintoticamente nel tempo) pari a
vs =
2 r 2 g (ρ − ρl )
9
η
(3)
Ricordiamo che la (3) è valida per il moto all’interno di un sistema “indefinito”, cioè
avente dimensioni r in ogni direzione (per evitare “effetti di parete” e di fondo del
contenitore).
2
Il viscosimetro a sfera cadente
In laboratorio ci troveremo a operare con un contenitore di dimensioni necessariamente
limitate, anche perchè è conveniente usare volumi ridotti di liquido per assicurare la
costanza e l’uniformità della temperatura, vista la notevole dipendenza di η dalla temperatura.
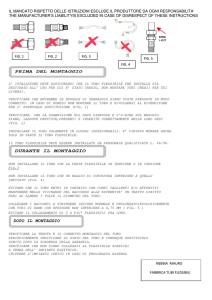
In questo spirito è stato costruito il viscosimetro a sfera cadente, che viene offerto per le
misure in laboratorio e che rappresenta il viscosimetro standard per molte nazioni (ISO12058, DIN-53015 per la Germania). Il viscosimetro è rappresentato schematicamente
nelle Fig.4 e 5.
4
Figura 4:
Il tubo di vetro calibrato, con D = 2 R = (15.940 ± 0.002) mm, sul quale sono incisi
tre tratti distanti 50 mm l’uno dall’altro ( AC = CB = 50 mm in Fig.4) è posto all’interno
di una “camicia” cilindrica in cui può circolare acqua per una migliore termostatazione
del tubo di caduta e del suo contenuto. Nell’apposito foro della “camicia” è posto un
termometro che ha un errore di sensibilità di 0.1◦ C.
Il tubo centrale di caduta, coassiale con la “camicia” esterna di termostatazione, è
inclinato di 10◦ rispetto alla verticale del luogo di misura e può essere facilmente “rovesciato” (cioè ruotato di 160◦ ). La misura viene effettuata lasciando cadere lungo il tubo,
riempito del liquido di cui si vuol misurare η, una sfera di dimensioni confrontabili con
quelle del tubo. L’inclinazione di 10◦ è tale che la sfera durante la caduta percorra un
tragitto rettilineo lasciando una superficie costante libera per il flusso del liquido. Il
tubo centrale di caduta è chiuso da un tappo pieno ad un estremo e da un tappo con
un foro centrale di dimensioni capillari all’altro, per permettere la fuoriuscita del liquido
sovrabbondante in fase di chiusura e delle bolle d’aria che devono essere rimosse prima
dell’effettuazione della misura (vedi Fig.5).
Per effetto della presenza di un tubo di dimensioni confrontabili con quelle della sfera
la semplice relazione (3) utilizzabile per determinare η deve essere corretta per tener conto
degli “effetti di parete” e “di fondo” del contenitore.
Esistono modellizzazioni fisico-matematiche di moti viscosi di una sfera in cilindri di dia5
Figura 5:
metro D ∼ d, che portano tuttavia ad equazioni molto complicate e di difficile parametrizzazione pratica. Per ovviare a queste complicazioni sono state determinate correzioni
parametriche sperimentali, dedotte su liquidi di η noto (determinato con altri metodi),
posti in cilindri con D ∼ d. Tali correzioni parametriche portano a modificare la (3) in
η=
2 r 2 g cos(10◦ )(ρ − ρl )
β(r)
9
vs
(4)
dove β(r) è la costante strumentale che tiene conto parametricamente degli “effetti di
parete”, descritti precedentemente, e vs = l/t ( l = 50 mm oppure l = 100 mm a seconda
che il tempo sia misurato fra A e C oppure fra A e B, vedi Fig.4).
Utilizzando un liquido di viscosità nota è stato possibile determinare la dipendenza
della costante β(r) dal raggio della sfera ottenendo una relazione del tipo
6
β(r) = β0
r
1−
R
α
La relazione (4) può quindi essere scritta nella forma
2 r 2 g cos(10◦ )β0 (1 − Rr )α (ρ − ρl ) t
η=
9
l
Definendo
C=
2 g cos(10◦ )
β0
9
l
(costante strumentale fissa), si ottiene
η=C r
2
r
1−
R
α
(ρ − ρl ) t = kcal (ρ − ρl ) t
(5)
Conoscendo le due costanti strumentali C e α, si vede che η può essere ottenuta dalla
misura del raggio r e della densità ρ della sfera cadente, della densità ρl del liquido di cui
si vuol determinare η e del tempo di caduta t della sfera.
Le costanti strumentali possono essere determinate da valori di calibrazione, ottenuti
con liquidi di ρl e η noti, nei quali sono state fatte cadere sfere di ρ e r noti. La seguente
tabella fornisce i dati di calibrazione per il caso in cui l = 100 mm.
r (mm)
kcal (10−2 poise cm3 g −1 s−1 )
r (mm)
kcal (10−2 poise cm3 g −1 s−1 )
7.905
0.0084
7.636
0.503
7.903
0.0083
7.628
0.496
7.802
0.099
6.996
6.70
7.801
0.100
6.995
7.71
7.787
0.110
5.501
7.68
7.784
0.112
5.500
7.68
Dalla (5) si vede che
kcal = C r
2
r
1−
R
α
.
Per determinare i valori di C e α occorre linearizzare la relazione precedente; ciò è ottenuto
immediatamente prendendo i logaritmi naturali di ambo i membri e ottenendo
kcal
ln
r2
!
r
= ln C + α ln 1 −
R
(6)
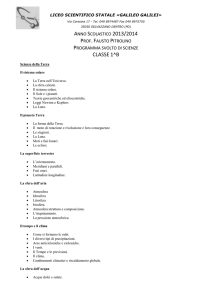
I dati della tabella di calibrazione sono riportati in grafico in Fig.6. Applicando il metodo
dei minimi quadrati otteniamo che
7
Figura 6: Calibrazione della costante strumentale del viscosimetro
ln C = 7.71 ± 0.05
e
α = 2.49 ± 0.02
Conseguentemente
C = (22.3 ± 1.1) 102 · 10−2 poise cm g −1 s−1 = (22.3 ± 1.1) poise cm g −1 s−1 .
3
Procedure di misura
Per un corretto funzionamento del viscosimetro si deve preliminarmente porre in “bolla”
lo strumento agendo sui piedini a vite del basamento.
Per riempire il tubo di caduta si versano circa 45 cm3 di liquido (di densità ρl già determinata o nota), in modo che il livello sia a circa 20 mm dal bordo del tubo. Occorre
fare molta attenzione che eventuali bolle d’aria vengano rimosse dall’interno del tubo. Si
8
mette la sfera nel tubo e si chiude con il tappo forato (vedi Fig.5); il liquido dovrebbe
superare il livello del capillare centrale del tappo.
E‘ consigliabile attendere almeno 5 minuti dal momento dell’introduzione della sfera nel
tubo prima di iniziare le misure del tempo di caduta t per permettere l’omogeneizzazione
della temperatura fra tutte le componenti (sfera, liquido, tubo, acqua esterna). Ciò sarà
facilitato se faremo percorrere varie volte il tubo di caduta alla sfera, ruotando opportunamente tutto l’apparecchio.
Dopo aver realizzato varie misure dei tempi di caduta, rilevando i tempi sia per la distanza
di 50 mm sia per quella di 100 mm, si estrae la sfera dal viscosimetro e se ne misura il
diametro con un Palmer, facendo attenzione ad effettuare la misura in posizioni diverse
al fine di evidenziare eventuali effetti di non sfericità.
Si dovrà poi misurarne la massa M tramite una serie di pesate con la bilancia elettronica
di precisione. In tal modo sarà possibile ottenere facilmente la densità media della sfera
ρ=
4
3
M
π r3
con incertezza relativa
∆ρ
∆M
∆r
=
+3
.
ρ
M
r
Per la valutazione dell’incertezza assoluta sulla misura di η, abbiamo dalla (5) che,
ricordando che ρ e r non sono indipendenti tra loro,
dC
dr d((1 − Rr )α ) d(ρ − ρl ) dt
dη
=
+2
+
+
=
+
η
C
r
(1 − Rr )α
(ρ − ρl )
t
dC
dr α (1 − Rr )α−1
=
+2 −
C
r
(1 − Rr )α
dr
R
r α
α (1 − Rr )α−1 Rr2 dR (1 − R ) ln 1 −
+
+
(1 − Rr )α
(1 − Rr )α
r
R
dα
+
dρ
dρl
dt
−
+
(ρ − ρl ) (ρ − ρl ) t
Si suppone che ρl sia nota con una precisione superiore a quella di ρ. Se poi è anche
ρ ρl potremo sostituire ρ al posto di ρ − ρl ed ottenere:
α Rr dr
α Rr dR
dη
dC dt dM
dr
dr
r
=
+
+
−3
+2
−
+
+ ln 1 −
r
r
η
C
t
M
r
r
1− R r
1− R R
R
α Rr
α Rr dR
dC dt dM
dr
r
=
)
+
+
− (1 +
+
+ ln 1 −
r
r
C
t
M
1− R r
1− R R
R
dα =
dα
Passando alle variazioni finite
∆η
∆C ∆t ∆M α r ∆r α r ∆R r ∆α
=
+
+
+ 1 +
+
+ ln 1 −
η
C
t
M
R − r r
R − r R
R Si vede immediatamente che i termini dominanti sono quelli associati a ∆R e ∆r per
la piccolezza del denominatore R − r rispetto al numeratore.
9