UNIVERSITA’ DEGLI STUDI DI FIRENZE
FACOLTA’ DI INGEGNERIA
A.A. 2000/2001
Corso di Laurea in Ingegneria Ambiente e Territorio
Corso di Teoria dei Sistemi
“Studio di un modello ARMA per l’analisi del traffico con valutazione
dell’influenza della pioggia tra le categorie: Moto e Auto”
Docente: prof. Alessandro Casavola
Studente: Alessio Nenti
Elaborato di teoria dei sistemi
Modello ARMA di dati di traffico
INDICE
INDICE
1
DESCRIZIONE DEI DATI
2
ANALISI DEI DATI
4
IPOTESI INIZIALI
9
INDIVIDUAZIONE DELL'ORDINE DEL MODELLO ARMA
12
COSTRUZIONE DEL MODELLO ARMA
17
APPLICAZIONE PER PREVISIONE
19
CONCLUSIONI
20
BIBLIOGRAFIA
21
2
Elaborato di teoria dei sistemi
Modello ARMA di dati di traffico
Descrizione dei dati
Lo studio da me effettuato, si basa sull’analisi di una serie storica di dati
riguardanti il volume di traffico sulla strada provinciale n° 34 di Rosano, con
postazione in rettilineo a circa un Km dal centro di Pontassieve.
I valori in oggetto sono stati reperiti presso il Programma Tutela Ambientale
della Provincia di Firenze all’ufficio Energia, Risorse Idriche e DAT (Territorial
Acquisition Dates).
La serie storica, si riferisce a rilevazioni orarie del numero di veicoli transitati
sulla SP 34, con osservazioni divise in quattro periodi diversi:
-
dal 22 al 29 Agosto 2000 (7 gg);
-
dal 16 Febbraio al 8 Marzo 2001 (20 gg);
-
dal 20 Marzo al 6 Aprile 2001 (17 gg);
-
dal 13 Aprile al 2 Maggio 2001 (19 gg);
per un totale di 1513 osservazioni.
Le misurazioni sono state effettuate con strumentazione conta-traffico KV300
della soc. SODI SCIENTIFICA S.p.A. e la relativa elaborazione dei dati è stata
eseguita con il software, sempre fornito dalla medesima società, tipo KV-97.
Fig. 1: Strumento conta-traffico KV300 e visualizzazione di un grafico del KV97
3
Elaborato di teoria dei sistemi
Modello ARMA di dati di traffico
Dopo l’elaborazione dei dati col KV97, il volume di traffico viene suddiviso in
classi di appartenenza (ECC Classes extraction) assegnate direttamente dallo
strumento in base alla lunghezza e al tipo di perturbazione del campo
magnetico rilevata durante il passaggio. Le classi sono:
-
Motorbikes;
-
Cars;
-
Vans;
-
Truck;
-
Busses;
-
Trucks Trailer.
Come viene mostrato un esempio di layout qui sotto.
Street (nr. / name):SP. 34DI ROSANO
Locality:VALLINA
Municipality:BAGNO A RIPOLI
Traffic Direction: ALL
Periodic report
ECC Classes extraction
Measurements of
23/08/200
Hour
Cars
Motorbike
Wednesday
Vans
Trucks
Busses
Tracks Trailer
Total
%Hour
00.00
13
187
36
2
3
0
241
2,1
01.00
9
97
16
1
1
1
125
1,1
02.00
5
71
15
0
0
0
91
0,8
03.00
1
30
8
3
0
2
44
0,4
………………………………………………………………………………………………………………………………………………………………………………………………….
………………………………………………………………………………………………………………………………………………………………………………………………….
Total
754
Peek hour
Hour
Vehicles
Vehicles %
8402
1.728
19
74
6,58
7
686
73.28
Total measured vehicles:
11.466
381
18
161
15.07
for a maximum peek of
57
7
43
3.32
144
7
6
0.50
11466
10
18
1.26
910
Fig. 2: Layout del KV97
Al fine di effettuare una riduzione della mole di dati e renderli più maneggevoli,
è stato preso in esame solo le categorie:
4
-
Motorbikes
-
Cars.
Elaborato di teoria dei sistemi
Modello ARMA di dati di traffico
A questi dati da traffico sono stati resi disponibili anche altre informazioni
analitiche per un’analisi più completa, tra cui:
-
Dati di pioggia, cioè i mm di pioggia orari negli stessi giorni delle
osservazioni di traffico, dal pluviometro di Rosano dell’Idrografico di Pisa;
-
Copertura giornaliera del cielo, cioè la condizione meteorologica dei
giorni osservati;
-
I giorni della settimana per vedere le eventuali periodicità del traffico
settimanale.
L’obiettivo di questo elaborato è di tarare un modello ARMA in base alla serie
storica dei dati in possesso, e di usarlo per generare una previsione di traffico
in base ad un “ingresso” di tipo ambientale.
L’analisi si è articolata nei seguenti passi:
§
Studio delle caratteristiche dei dati rilevati e relazioni tra le varie serie.
§
Identificazione del modello ARMA e stima della sua bontà.
§
Applicazione del modello a scopo previsionale con verifica su dati
realmente osservati.
Analisi dei dati
Per una migliore analisi dei dati, descriviamo la situazione ambientale
della strada in esame.
La SP 34, è una strada extraurbana di collegamento tra il centro abitato di
Firenze ed i centri limitrofi, sulla direzione est-sudest di Pontassieve. Il traffico
giornaliero è caratterizzato dallo spostamento delle persone in orario di “inizio
lavoro” (mattina dalle 6.00 alle 8.00 circa) e “fine lavoro” (sera dalle 18.00 alle
20.00 circa). Ciò comporta dei picchi in certe ore del giorno, e ricadute in altre.
Quest’andamento è valido per la settimana che va dal Lunedì al Venerdì.
Per il Sabato e la Domenica si nota con chiarezza che il tipo di traffico è molto
diverso sia come volume, sia come distribuzione oraria durante il giorno. Si
5
Elaborato di teoria dei sistemi
Modello ARMA di dati di traffico
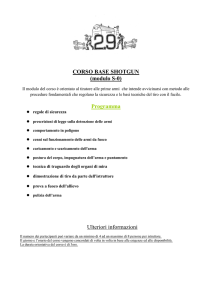
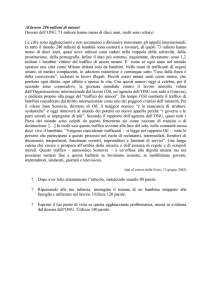
riporta una parte del grafico dell’andamento delle macchine (verde) e delle
moto (fuxia), con grafico costruito mediante il software Igor Pro 4.00 della
WaveMetrics, Inc. in versione dimostrativa.
Fig. 3: Sviluppo nel tempo di Moto e Macchine
Dalla figura si rileva che moto e macchine hanno un andamento “accoppiato”,
anche se il grafico delle moto è stato plottato con una scala di ordine diverso.
Da questo tipo di analisi si può già determinare alcune caratteristiche
“fisiologiche” della strada:
-
le ore di traffico più intenso (le così dette “ore di punta”);
-
le ore di traffico più scorrevole;
-
la differenziazione del traffico tra i giorni lavorativi e il week-end;
-
ordine di grandezza del volume totale di traffico in condizioni normali.
Tutte queste informazioni possono essere usate dagli Enti competenti per una
migliore programmazione delle scelte di intervento sulla strada: lavori di
6
Elaborato di teoria dei sistemi
Modello ARMA di dati di traffico
manutenzione, per esempio, che comportano la chiusura di una corsia della
carreggiata.
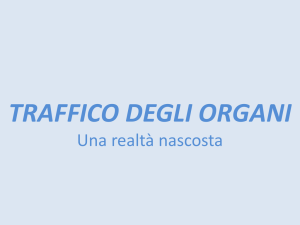
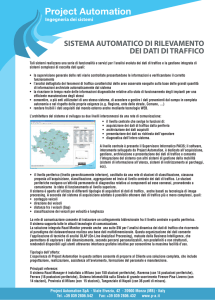
Ora vediamo come sono distribuite il numero di macchine in relazione con il
numero di moto, su di un grafico in cui riporta le due grandezze,
rispettivamente sull’asse delle ordinate e sull’asse delle ascisse.
Fig. 4: Distribuzione Moto e Macchine
Dalla
figura
si
può
costatare
che
la
distribuzione
può
essere
approssimativamente lungo una curva monotona crescente, con diminuzione
della pendenza nella zona di spandimento dei punti. Ciò pu
interpretato come una saturazione del volume di traffico della categoria delle
auto e quindi sembrerebbe che da una certa soglia in poi l’aumento del numero
dei veicoli sia a carico solo delle moto.
Un altro aspetto che si evince, è una relazione quasi proporzionale nella prima
parte del grafico, che rappresenta il volume di traffico più frequente
caratterizzante la strada.
Vediamo ora le relazioni che ci sono tra le osservazioni delle moto con quelle
della pioggia e tra auto e pioggia.
7
Elaborato di teoria dei sistemi
Modello ARMA di dati di traffico
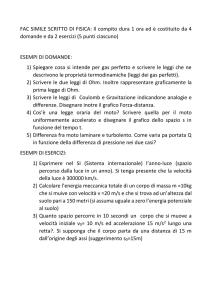
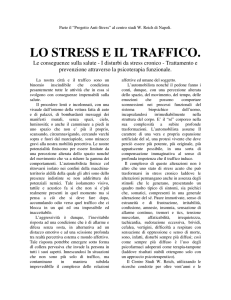
Quello che ci si aspetta, è che in presenza di pioggia, il numero delle moto
decresca. Vediamo il grafico MOTO-RAIN.
Fig.5: Relazione tra Moto e Pioggia
Da una lettura di questo grafico, si può dire che si è verificato, in parte, cosa ci
aspettavamo e cioè che in presenza di pioggia si ha una diminuzione brusca del
numero delle moto dell’ordine di 100 veicoli. Si vede anche che tale “salto” non
è proporzionale ai mm di pioggia, ma è determinato dal fatto se piove oppure
no.
Questo
vuol
dire
che
i
dati
della
copertura
del
cielo
sono
già
“intrinsecamente” stimati nelle osservazioni di pioggia.
Un altro aspetto che notiamo è che dopo il “salto”, il grafico ha un andamento
pressocchè costante. Ciò significa che quando piove c’è un certo numero di
persone che non usa la moto. Ma c’è anche un numero di persone che usa
sempre la moto indipendentemente dalla quantità di pioggia. Probabilmente
certe scelte scaturiscono dalla volontà, nonostante il cattivo tempo, di evitare
problemi di traffico intenso, come code ed ingorghi, che si generano in
prossimità della città durante i giorni piovosi e che provocano ritardi.
8
Elaborato di teoria dei sistemi
Modello ARMA di dati di traffico
Lo stesso grafico l’andiamo a studiare per le auto con la pioggia. In questo
caso ci aspettiamo un andamento contrario a quello delle moto. Vediamo il
grafico CARS-RAIN.
Fig.6: Relazione tra Auto e Pioggia
Dalla lettura di questo grafico risulta un andamento piuttosto inaspettato e del
tutto simile a quello delle moto.
Anche qui, il massimo numero di veicoli risulta a pioggia zero e in presenza di
quest’ultima si ha un “salto” decrescente dell’ordine di 700-800 veicoli seguito
da un andamento costante. E’ possibile che parte delle persone che non usano
la moto con la pioggia, vadano ad incrementare il grafico delle auto, ma tutto
ciò non si può vedere nel grafico a causa dell’ordine di grandezza diverso delle
due serie. Tale andamento, comunque, induce a pensare che, in presenza di
tempo perturbato, c’è una certa quantità di persone che usa altri mezzi per gli
spostamenti al di fuori delle auto e delle due ruote. Questo ci rivela che il
nostro studio ha sicuramente delle limitazioni che possono incidere sul buon
risultato dell’analisi del traffico, in special modo in fase di previsione.
9
Elaborato di teoria dei sistemi
Modello ARMA di dati di traffico
Ipotesi iniziali
Per rendere più comoda la progettazione del modello, e alla luce delle analisi
finora fatte, si è deciso di assumere come unico dato da traffico il rapporto tra
il numero di moto ed il totale di moto più macchine, cioè
moto =
n°moto
(n°moto + n° macchine)
In questo modo, si riesce a tener conto di entrambe le categorie di veicoli
lavorando
con
una
sola
variabile
senza
che
vengano
modificate
le
caratteristiche del traffico. Il rapporto delle auto sul totale dei veicoli, allora,
sarà dato da
cars = 1 − moto
Vediamo ora tutto lo spettro dei nostri dati in grafico, dove sono presenti i
seguenti elementi:
-
moto (rapporto n°moto sul totale);
-
pioggia (dati dei mm di pioggia caduti);
-
giorni (i giorni della settimana rappresentati da un codice che và da 1 a 7
a domenica.
10
Elaborato di teoria dei sistemi
Modello ARMA di dati di traffico
Fig. 7: Spettro dei dati disponibili
Si può costatare che, effettivamente, in presenza della pioggia, linea blu, il
grafico delle moto, linea rossa, ha delle flessioni. Ci si accorge, però, che per
uno studio approfondito servirebbero un numero di dati molto maggiore, una
serie temporale più lunga, a causa anche dell’aleatorietà della pioggia.
Un altro aspetto che si coglie, è la poca rilevanza della differenziazione dei
giorni della settimana in base ad un codice. Infatti, anche alla luce di
precedenti analisi, si è visto che il giorno della settimana non ha molta
rilevanza, se non per il sabato e la domenica in cui, si è visto, che l’andamento
In questo grafico, si riesce a vedere molto bene lo sviluppo dei dati delle moto,
e si nota la presenza di un trend evidenziato da oscillazioni lungo l’andamento
principale.
Le serie temporali relative a fenomeni reali contengono, quasi sempre, degli
elementi, più o meno regolari. Si tratta, come abbiamo rilevato, di una
componente stagionale che altera la visione dell’andamento generale e che,
11
Elaborato di teoria dei sistemi
Modello ARMA di dati di traffico
almeno per certi problemi, è bene che sia rimossa. Nel nostro caso si hanno
queste oscillazioni giornaliere che si ripetono nel tempo, come viene mostrato
in figura 3 ed in figura7.
Per i dati a disposizione, si può eliminare facilmente questi fenomeni andando
a lavorare con la serie di differenze, vale a dire trasformando la serie originale
in una serie alle differenze prime, ottenendo un grafico di questo tipo:
Moto detrendizzato
0.15
16
0.1
14
12
0.05
1511
1501
1491
1481
1471
1461
1451
1441
1431
1421
1411
1401
1391
1381
1371
1361
1351
1341
1331
1321
1311
1301
1291
1281
1271
1261
1251
1241
1231
1221
1211
1201
1191
1181
1171
1161
1151
1141
1131
1121
1111
1101
1091
1081
1071
1061
1051
991
1041
1031
981
1021
971
961
1011
951
1001
941
931
921
911
901
891
881
871
861
851
841
831
821
811
801
791
781
771
761
751
741
731
721
711
701
691
681
671
661
651
641
631
621
611
601
591
581
571
561
551
541
531
521
511
501
491
481
471
461
451
441
431
421
411
401
391
381
371
361
351
341
331
321
311
301
291
281
271
261
251
241
231
221
211
201
191
181
171
161
151
141
91
81
131
71
121
111
61
101
1
51
41
31
21
11
10
0
8
-0.05
6
-0.1
4
-0.15
2
-0.2
0
Moto detrend
Rain
Fig.8: Grafico della serie Moto detrendizzata e la serie pioggia
I dati relativi alla pioggia, invece, vengono lasciati così come sono,
considerando che tengono conto anche della copertura del cielo.
12
Elaborato di teoria dei sistemi
Modello ARMA di dati di traffico
Individuazione dell’ordine del modello ARMA
In un sistema lineare a tempo discreto d’ordine n, una somma pesata degli
ultimi (n+1) valori d’ingresso uguaglia, in ogni istante di tempo t, una somma
pesata dei corrispondenti valori d’uscita, cioè
y (t ) + α1 y(t − 1) + ..... + αn y (t − n ) = β0 u (t ) + β1u (t − 1) + ..... + β mu (t − m)
Tale modello, chiamato ARMA[n, m] Auto-Regressive Moving Average, con “n”
indice della componente autoregressiva e “m” indice della componente a media
mobile, mette direttamente in relazione l’ingresso “u” con l’uscita “y”. Il
vantaggio di questo schema misto, risiede nel fatto che sovente dovrebbero
essere sufficienti pochi parametri per formare un modello generatore che,
altrimenti, sarebbe costituito da uno a medie mobili, o uno schema
autoregressivo costituito da molti termini.
Nel nostro caso gli ingressi “u” sono i dati delle piogge, e le uscite “y” sono i
dati da traffico.
Per la scelta dell’ordine del modello che più si adatta alla serie storica studiata,
si osserva i test AIC (Asymptotic information criterion) sviluppato da Akaike nel
1974. Il test AIC è definito come:
AIC ( k ) = n ⋅ log(σ k2 ) + 2k
K=0,1,2,……
dove σ k2 è la varianza stimata sui residui di un modello con k parametri.
Per meglio velocizzare le operazioni di calcolo, ci siamo serviti di un software
specifico, gratuito: R - Statistical Data Analisys, con il quale siamo in grado
di stimare l’ordine del modello e verificarne la bontà di adattamento. Per far ciò
si sono eseguite prove di modelli arma univariati sulle due serie di dati: sul
traffico e sulle piogge.
Si riporta di seguito uno degli script editati sul programma R; la parte rossa è il
comando che s’impone, la parte blu è la risposta del software.
13
Elaborato di teoria dei sistemi
Modello ARMA di dati di traffico
data(solomoto)
> s<-solomoto
> summary(s.arma<-arma(s,order=c(2,0)))
Call:
arma(x = s, order = c(2, 0))
Model:
ARMA(2,0)
Residuals:
Min
1Q
Median
3Q
Max
-0.1203631 -0.0074832 -0.0004993 0.0065674 0.1221535
Coefficient(s):
Estimate
Std. Error t value
Pr(>|t|)
ar1
-0.4820507 0.0251101 -19.197 <2e-16 ***
ar2
-0.2164943 0.0251042 -8.624 <2e-16 ***
intercept -0.0001289 0.0004455 -0.289
0.772
--Signif. codes: 0 `***' 0.001 `**' 0.01 `*' 0.05 `.' 0.1 ` ' 1
Fit:
sigma^2 estimated as 0.0003005, Conditional Sum-of-Squares = 0.45, AIC = -7970.8
Fig.9: Layout del programma R
Analizzando le varie risposte, si deve tener conto di:
Coeff. AIC, il quale deve essere, relativamente, il più basso possibile tra
-
le varie prove effettuate;
-
Tolleranza e significatività dei coefficienti stimati;
-
Grafico d’autocorrelazione dei residui.
Tale grafico è di questo tipo:
0.4
0.0
ACF
0.8
ACF of Residuals
0
5
10
15
Lag
14
20
25
30
Elaborato di teoria dei sistemi
Modello ARMA di dati di traffico
Fig.10: Funzione di autocorrelazione dei residui
Dopo qualche tentativo, comparando i sopra citati parametri di controllo, e alla
luce delle analisi fino ad ora effettuate sul movimento dei veicoli, si può
stimare un ordine del modello, per i dati di traffico, di 24 passi, cioè un
modello regressivo di 24 ore. Si riporta la risposta di R:
summary(s.arma<-arma(s,order=c(24,0)))
Call:
arma(x = s, order = c(24, 0))
Model:
ARMA(24,0)
Residuals:
Min
1Q
Median
3Q
Max
-0.0717701 -0.0072998 -0.0006693 0.0061839 0.1216356
Coefficient(s):
Estimate Std. Error t value Pr(>|t|)
ar1
-0.6158175 0.0257381 -23.926 < 2e-16 ***
ar2
-0.4339509 0.0301212 -14.407 < 2e-16 ***
ar3
-0.3195629 0.0319481 -10.003 < 2e-16 ***
ar4
-0.3185582 0.0328047 -9.711 < 2e-16 ***
ar5
-0.3176119 0.0332922 -9.540 < 2e-16 ***
ar6
-0.3162563 0.0337827 -9.361 < 2e-16 ***
ar7
-0.2909496 0.0341212 -8.527 < 2e-16 ***
ar8
-0.3167508 0.0344258 -9.201 < 2e-16 ***
ar9
-0.2990921 0.0348706 -8.577 < 2e-16 ***
ar10
-0.3159176 0.0348214 -9.073 < 2e-16 ***
ar11
-0.3153235 0.0346389 -9.103 < 2e-16 ***
ar12
-0.3234838 0.0345949 -9.351 < 2e-16 ***
ar13
-0.3170079 0.0345255 -9.182 < 2e-16 ***
ar14
-0.3399090 0.0345624 -9.835 < 2e-16 ***
ar15
-0.3018051 0.0347183 -8.693 < 2e-16 ***
ar16
-0.2253798 0.0347772 -6.481 9.13e-11 ***
ar17
-0.2216645 0.0342574 -6.471 9.76e-11 ***
ar18
-0.2536887 0.0339184 -7.479 7.46e-14 ***
ar19
-0.2490716 0.0334926 -7.437 1.03e-13 ***
ar20
-0.2328982 0.0329048 -7.078 1.46e-12 ***
ar21
-0.1471196 0.0323649 -4.546 5.48e-06 ***
ar22
-0.1476272 0.0314963 -4.687 2.77e-06 ***
ar23
-0.1168854 0.0297039 -3.935 8.32e-05 ***
ar24
0.0371487 0.0253771 1.464 0.143
intercept -0.0005329 0.0004084 -1.305 0.192
--Signif. codes: 0 `***' 0.001 `**' 0.01 `*' 0.05 `.' 0.1 ` ' 1
Fit:
sigma^2 estimated as 0.0002509, Conditional Sum-of-Squares = 0.37, AIC = -8199.46
Fig.11: Layout R per ARMA a 24 passi per traffico
15
Elaborato di teoria dei sistemi
Modello ARMA di dati di traffico
In questo caso si ha un valore del test AIC più basso del precedente, buone
tolleranze e significatività dei coefficienti stimati e un grafico dei residui come
riportato sotto.
0.4
-0.4
0.0
ACF
0.8
ACF of s
0
5
10
15
20
25
30
25
30
Lag
0.4
0.0
ACF
0.8
ACF of Residuals
0
5
10
15
20
Lag
Fig. 12: Funzioni di autocorrelazione della serie e dei residui
Per i dati di pioggia, la situazione è un po’ diversa. Usando lo stesso sistema
del traffico, cioè basandosi sugli stessi parametri, la stima dell’ordine del
modello è stata eseguita in tre passi. Si riporta, di seguito, lo script del
16
Elaborato di teoria dei sistemi
Modello ARMA di dati di traffico
software R, ed i grafici delle funzioni d’autocorrelazione della serie e dei
residui.
Data(solorain)
r<-solorain
summary(r.arma<-arma(r,order=c(3,0)))
Call:
arma(x = r, order = c(3, 0))
Model:
ARMA(3,0)
Residuals:
Min
1Q Median
3Q
Max
-3.65159 -0.05246 -0.05246 -0.05246 13.30005
Coefficient(s):
Estimate
Std. Error t value Pr(>|t|)
ar1
0.55310
0.02567
21.545 < 2e-16 ***
ar2
-0.09262
0.02925
-3.167 0.001541 **
ar3
0.04715
0.02567
1.837 0.066256 .
intercept 0.05246
0.01353
3.876 0.000106 ***
--Signif. codes: 0 `***' 0.001 `**' 0.01 `*' 0.05 `.' 0.1 ` ' 1
Fit:
sigma^2 estimated as 0.2635, Conditional Sum-of-Squares = 397.96, AIC = 2285.6
Fig.13: Layout di R per Arma in 3 passi per la pioggia
0.4
0.0
A C F
0.8
ACF of s
0
5
10
15
20
25
30
25
30
Lag
0.4
0.0
A C F
0.8
ACF of Residuals
0
5
10
15
20
Lag
Fig. 14: Funzioni di autocorrelazione della serie pioggia e dei residui
17
Elaborato di teoria dei sistemi
Modello ARMA di dati di traffico
Costruzione del modello ARMA
Una volta stimato l’ordine del modello si eseguono i calcoli per la taratura e
quindi ricavare i suoi coefficienti.
Dalla formula della definizione del modello riportata nel paragrafo precedente,
si può ricavare la y(t):
y (t ) = −α1 y (t − 1) − ..... − αn y (t − n) + β0 u (t ) + β1u (t − 1) + ..... + βm u (t − m)
che scrivendola in forma matriciale ha una espressione di questa forma
y (t )
y (t + 1)
. =
.
y (t + n )
y (t − 1)
y( t )
y (t + 1)
.
.
y (t − 2) . .
y(t − 1) . .
.
. .
.
. .
.
. .
ed in modo contratto è del tipo
Y = DX
α1
u (t )
u (t − 1) α2
u (t + 1)
u (t ) .
.
. × .
.
. β0
.
. β1
.
dove :
-
Y è il vettore dei dati da traffico con Y ∈ ℜ Nx1 ;
-
D è la matrice in cui ci sono i dati di traffico e della pioggia, è una
matrice rettangolare con più righe che colonne, D ∈ ℜ Nxn ;
-
X è il vettore dei coefficienti, X ∈ ℜ nx1
La matrice D non si può invertire, allora per ricavarsi X si moltiplica da ambo le
parti per la matrice trasposta, cioè
D’ Y = (D’D) X
Ora la matrice (D’D) è quadrata, ha rango piano, cioè il suo determinante è
diverso da zero, allora la possiamo invertire, trovando la soluzione del sistema
detta “ai minimi quadrati”.
18
Elaborato di teoria dei sistemi
Modello ARMA di dati di traffico
X = (D’D) D’Y
Nel nostro caso, esportando la matrice dei dati da Excel2000 a Matlab5.3 è
quasi immediato trovare il vettore dei coefficienti, i quali risultano:
a1
a2
a3
a4
a5
a6
a7
a8
a9
a10
a11
a12
a13
a14
a15
a16
a17
a18
a19
a20
a21
a22
a23
19
-0.6455
-0.4924
-0.3835
-0.3959
-0.3931
-0.4003
-0.3741
-0.4032
-0.3796
-0.4060
-0.3847
-0.4015
-0.3925
-0.4378
-0.3776
-0.3213
-0.3036
-0.3198
-0.3427
-0.3056
-0.2299
-0.1809
-0.1983
b0
b1
b2
-0.0009
0.0000
-0.0003
Elaborato di teoria dei sistemi
Modello ARMA di dati di traffico
Applicazione del modello per previsione
Una volta che siamo a conoscenza dei coefficienti e quindi tarato il modello, si
potrebbe rappresentare una situazione di traffico attraverso il nostro sistema
lineare.
Da tutto l’insieme dei dati, abbiamo lascato alcune ore consecutive per la
verifica del modello appena costruito. Si riportano i risultati di previsione delle
prime tre ore successive, in rosso i risultati del modello ed in nero la situazione
reale.
Previsione
Dati reali
Modello
Diff.
Y(t)
-0.005993118
-0.02720708
0.02124
Y(t+1)
-0.001079504
-0.03968373
0.03860
Y(t+2)
0.003921488
-0.05805812
0.06198
Y(t+3)
-0.003255273
-0.089206971
0.08595
Y(t+4)
0.000433662
-0.1311555
0.13159
Quello che si nota subito è che i dati del modello non corrispondono a quelli
propagazione nel tempo dello scarto dell’ordine del centesimo
crescente. I dati reali si riferiscono a differenze prime tra valori successivi
(differenze tra i rapporti del numero di moto con il totale). Avere degli scarti
dello stesso ordine delle differenze vuol dire che l’errore sulla stima può essere
consistente.
Facendo altre prove, utilizzando i dati a disposizione e traslando nel futuro di
11 ore e poi traslando ancora di 23 ore, le previsioni sulla 12a e 24a ora
risultano:
Previsione
Dati reali
Modello
Diff.
Y(12)
0.005945244
-0.006756815
0.01270
Y(24)
-0.007747236
-0.004486312
-0.00326
L’errore è più basso, specialmente a 24 ore. Il problema è che aumentando le
ore di previsione aumenta l’errore sulle differenze.
20
Elaborato di teoria dei sistemi
Modello ARMA di dati di traffico
Conclusioni
A conclusione di quest’analisi su serie storiche di dati da traffico di veicoli, sulla
strada provinciale SP 34 di Rosano, e alla luce di tutti gli aspetti affrontati in
questo
elaborato,
posso
dire,
secondo
me,
che
la
modellizzazione
di
osservazioni di volume di traffico viene difficilmente stimata da un modello
lineare. Questo perché i modelli lineari, come quello ARMA, hanno problemi a
lavorare in modo apprezzabile con fenomeni con risposta non ben definita o
disturbata; a differenza di quello che può avvenire nella stima di un livello di
un bacino idrico. Le serie di dati da traffico, è uno di questi casi. Un’uscita
come il traffico, nella realtà, è influenzata da molti fattori come le altre
categorie di veicoli per esempio, che in un modello lineare non si può tener
conto.
Un
esempio
esplicativo
può
essere,
come
abbiamo
visto,
il
comportamento inaspettato delle auto e delle moto rispetto alla pioggia.
Sicuramente per ottenere risultati migliori, data la variabilità del traffico e vista
cessario avere serie storiche molto più lunghe e
continue, in modo da poter tarare il modello su di un numero di situazioni
maggiore.
21
Elaborato di teoria dei sistemi
Modello ARMA di dati di traffico
Bibliografia
Appunti del corso di “Teoria dei sistemi” A/A 2000/2001 prof. A. Casavola
LUIGI VAJANI
“Elementi della teoria delle serie temporali”, Milano 1969.
PICCOLO – VITALE
“Metodi statistici per l’analisi economica”, Il Mulino.
BOX – JENKINS “Time series analysis”, Holden – Day.
D. PICCOLO
“Analisi moderna delle serie storiche”, Ed. Franco Angeli.
CHATFIELD “The analysis of time series”, Chapman&Hall.
R-DOCUMENTATION
“The tseries packages”, “The dse packages”
Ringraziamenti
Per la realizzazione di questo elaborato si ringraziano:
L’ufficio Energia, presso l’Assessorato Ambiente della Provincia di Firenze, per
aver messo a disposizione la strumentazione tecnica per il rilievo dei dati di
traffico.
Ufficio Idrografico e Mareografico di Pisa, ed in particolare l’Ing. Bernardo
Mazzanti per aver reso disponibili i dati del pluviometro di Rosano.
L’Osservatorio Meteorologico Regionale LAMMA per aver gentilmente fornito i
dati di pioggia e copertura del cielo.
Gli ingegneri Paolo Covelli e Giacomo Pacini per la fornitura software e
supporto su serie temporali.
22