Controlli automatici
Progetto del controllore
nel dominio della frequenza
Prof. Paolo Rocco ([email protected])
Politecnico di Milano
Dipartimento di Elettronica, Informazione e Bioingegneria
Introduzione
Queste slide descrivono la metodologia di controllo classico del controllore
monovariabile nel dominio della frequenza
Verranno inizialmente effettuati i necessari richiami sul concetto e sulla
rappresentazione grafica della risposta in frequenza
Successivamente si discuteranno i requisiti di un sistema di controllo (stabilità,
prestazioni dinamiche e statiche), studiando come essi possano essere convertiti in
opportuni vincoli sulla risposta in frequenza della funzione di trasferimento d’anello
del sistema
Infine si presenterà la tecnica di sintesi del controllore “per tentativi”, ovvero basata
su affinamenti successivi del diagramma di Bode del modulo della funzione di
trasferimento d’anello (loopshaping)
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [2]
Risposta sinusoidale
Si consideri un generico sistema dinamico LTI a cui imponiamo un ingresso
sinusoidale:
u
U
G(s)
Y
ut A sint
t
T = 2
Se il sistema è asintoticamente stabile, esaurito un transitorio iniziale, anche
l’uscita è sinusoidale, con la stessa pulsazione della sinusoide in ingresso, e
risulta in particolare:
y t B sint
B A G j
G j
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [3]
Risposta in frequenza
Si definisce risposta in frequenza la seguente funzione complessa della variabile
reale :
G j,
0
La risposta in frequenza è quindi la restrizione della funzione di trasferimento al
semiasse immaginario positivo
La variabile prende il nome di pulsazione
La definizione di risposta in frequenza si dà per tutti i sistemi dinamici LTI (anche per
quelli instabili)
Il teorema della risposta sinusoidale vale invece per i sistemi LTI asintoticamente
stabili: conoscendo la risposta in frequenza per questi sistemi si sa come rispondono
a sinusoidi di pulsazione qualunque
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [4]
Risposta in frequenza
La risposta in frequenza è una funzione che restituisce valori complessi.
Come rappresentarla graficamente?
Diagrammi Cartesiani
Diagrammi polari
|G(j)|
Im
Re
G(j)
arg G(j)
G(j)
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [5]
Diagrammi di Bode
I diagrammi di Bode sono una particolare coppia di diagrammi Cartesiani della
risposta in frequenza
Si compiono delle scelte sulle scale degli assi e sulle quantità da riportare sugli assi
Sia nel diagramma del modulo sia in quello della fase l’asse delle ascisse (pulsazioni)
è in scala logaritmica: la distanza tra due generici punti che rappresentano le
pulsazioni 1 e 2 è proporzionale alla differenza tra i logaritmi di 1 e 2
2 4
1 3
1
2
3
4
In particolare la distanza tra due pulsazioni a rapporto 10 prende il nome di decade
0.1
1
10
100
1000
decade
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [6]
Diagramma di Bode del modulo
Ascissa: pulsazione in scala logaritmica
Ordinata: modulo in decibel in scala lineare
G j dB 20log10 G j
modulo in dB
Diagramma in
carta semilogaritmica
pulsazione (rad/s)
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [7]
Diagramma di Bode della fase
Ascissa: pulsazione in scala logaritmica
Ordinata: fase in gradi in scala lineare
G j
fase in gradi
Diagramma in
carta semilogaritmica
pulsazione (rad/s)
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [8]
Diagrammi di Bode asintotici
I diagrammi asintotici costituiscono un’approssimazione grafica dei diagrammi di Bode
della risposta in frequenza, facilmente tracciabile a mano.
Il diagramma di Bode del modulo asintotico è costituito da una spezzata, unione di
tratti di pendenza multipla di 20 dB/decade
Il diagramma di Bode della fase asintotico è costante a tratti, e in ogni tratto assume
valori multipli di 90°
Il tracciamento dei diagrammi di Bode asintotici può essere condotto secondo alcune
regole, che fanno riferimento alla seguente espressione della funzione di trasferimento:
Gs
sg
1 s
1 s
i
i
k
k
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [9]
Diagramma asintotico del modulo
1. A bassa frequenza ( 0) il diagramma giace sulla retta di pendenza -g (*),
passante per il punto ( = 1, |G|dB = ||dB)
2. A ogni pulsazione corrispondente a p poli (zeri) reali, la pendenza diminuisce
(aumenta) di p unità
3. A ogni pulsazione corrispondente alla pulsazione naturale di p coppie di poli (zeri)
complessi e coniugati, la pendenza diminuisce (aumenta) di 2p unità
4. La pendenza finale è pari al numero degli zeri meno il numero dei poli (regola di
verifica)
(*) La pendenza si indica per multipli di 20 db/decade: con pendenza “2” si intende 40
dB/decade, con pendenza “-3” si intende -60 dB/decade e così via.
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [10]
Diagramma asintotico della fase
1. A bassa frequenza ( 0) il diagramma giace sulla retta orizzontale di ordinata
– g 90°
2. A ogni pulsazione corrispondente a p zeri reali nel semipiano sinistro o p poli reali
nel semipiano destro, il diagramma ha un salto positivo di p 90°
3. A ogni pulsazione corrispondente a p zeri reali nel semipiano destro o p poli reali
nel semipiano sinistro, il diagramma ha un salto negativo di p 90°
4. A ogni pulsazione corrispondente alla pulsazione naturale di p coppie di zeri
complessi e coniugati nel semipiano sinistro o p coppie di poli complessi e coniugati
nel semipiano destro, il diagramma ha un salto positivo di p 180°
5. A ogni pulsazione corrispondente alla pulsazione naturale di p coppie di zeri
complessi e coniugati nel semipiano destro o p coppie di poli complessi e coniugati
nel semipiano sinistro, il diagramma ha un salto negativo di p180°
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [11]
Diagramma asintotici: esempio
Diagramma di Bode - Modulo
60
10 1 - s
s 1 0.1s 2
40
20
dB
Gs
0
____ reale
-20
____ asintotico
-40
-1
10
0
1
10
10
2
10
Diagramma di Bode - Fase
0
gradi
-90
-180
-270
-360
-1
10
0
10
1
10
2
10
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [12]
Diagrammi polari
Il diagramma polare rappresenta nel piano complesso il numero G(j) al variare di
da 0 a
Il modo più semplice per tracciare i diagrammi è appoggiarsi ai diagrammi di Bode
asintotici: si segue l’evoluzione al variare di del numero complesso che ha il
modulo e la fase rappresentata nei diagrammi
Nel caso di funzione di trasferimento con poli sull’asse immaginario il diagramma
polare tende all’infinito secondo asintoti che si possono determinare analiticamente
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [13]
Diagrammi polare: esempio
Gs
10
1 s 3
Parte con fase 0°
e modulo 10
Termina con fase
-270° e modulo 0
Diagramma di Bode - Modulo
1
20
dB
0
0
-1
-20
-2
0
10
1
-3
10
Im
-40
-1
10
Diagramma di Bode - Fase
-4
0
-5
gradi
-90
-6
-180
-7
-270
-1
10
0
10
1
10
-8
-4
-2
0
2
4
6
8
10
Re
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [14]
Ingressi periodici
Si consideri un generico sistema dinamico LTI a cui imponiamo un ingresso
periodico, sviluppabile in serie di Fourier:
U
G(s)
ut T ut ,t
Y
T
0
u t dt
u t U 0
U
n
cosn0 t n
n 1
0
2
T
Se il sistema è asintoticamente stabile, esaurito un transitorio iniziale, anche
l’uscita è periodica, con lo stesso periodo del segnale in ingresso, e risulta in
particolare:
y t Y0
Y
n
cosn0t n
n 1
Yn G jn0 U n
n n G jn0
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [15]
Ingressi aperiodici
Si consideri un generico sistema dinamico LTI a cui imponiamo un ingresso
aperiodico, sviluppabile in integrale di Fourier:
U
G(s)
Y
T : ut T ut , t
u t U cost d
-
u t dt
0
Se il sistema è asintoticamente stabile, esaurito un transitorio iniziale, anche
l’uscita è esprimibile tramite integrale di Fourier e risulta in particolare:
y t Y cost d
0
Y G jU
G
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [16]
Azione filtrante
Il teorema della risposta sinusoidale vale quindi per tutte le sinusoidi in cui è
scomponibile il segnale di ingresso (mediante serie o integrale di Fourier)
La risposta in frequenza consente quindi di calcolare la risposta a qualsiasi ingresso
La risposta in frequenza determina in particolare come si modificano le componenti
armoniche dell’ingresso
In questo senso un sistema dinamico asintoticamente stabile si può vedere sempre
come un filtro: alcune componenti armoniche dell’ingresso vengono attenuate, altre
amplificate, altra ancora rimangono inalterate
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [17]
Filtro passabasso
Il filtro passabasso è un sistema dinamico LTI asintoticamente stabile la cui risposta in
frequenza ha diagramma di Bode del modulo come il seguente:
|G(j)|dB
b
Se risulta:
G j dB 3,
definiamo banda passante del filtro l’insieme di pulsazioni:
: G j
dB
-3 0, b
estremo superiore della banda passante
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [18]
Componenti di un sistema di controllo
Ricordiamo che un generico sistema di controllo in anello chiuso è rappresentabile dal
seguente schema a blocchi:
dA
y°
u
C
dp
m
A
y
S
c
T
dT
S: sistema sotto controllo (o processo)
T: trasduttore
A: attuatore
C: controllore (o regolatore)
y: variabile controllata
yo: riferimento
c: misura
u: variabile di controllo
m: variabile manipolabile
dA: disturbo sull’attuatore
dP: disturbo sul processo
dT: disturbo sul trasduttore
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [19]
Componenti di un sistema di controllo
Nell’ipotesi di linearità di tutti i componenti, lo schema a blocchi può essere ritracciato
in termini di funzioni di trasferimento:
dp
y°
T(s)
c° + e c
c
R(s)
+ +
dT
u
H(s)
dA
+ +m
A(s)
P(s)
T(s)
e poi semplificato:
ns T s dT s
-1
y° +
-
T(s)
+ +y
R(s)
u
A(s)
m
P(s)
d
+ +y
d s P s d A s H s dP s
+ +
n
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [20]
Componenti di un sistema di controllo
Il sistema di controllo è in definitiva descritto dallo schema a blocchi:
y° +
-
R(s)
G(s)
d
+ +y
+ +
n
dove:
Gs T s P s As
è la funzione di trasferimento del sistema sotto controllo comprensiva di
strumentazione (attuatore e trasduttore).
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [21]
Formalizzazione del problema di controllo
y° +
-
R(s)
G(s)
d
+ +y
+ +
n
Nella nostra schematizzazione, G(s) è data (*) mentre R(s) è da determinare.
Si procederà al progetto fissando una serie di requisiti (o specifiche) che il sistema di
controllo deve rispettare:
Stabilità asintotica (nominale e robusta)
Prestazioni dinamiche (velocità di risposta, assenza di oscillazioni, reiezione di
disturbi)
Prestazioni statiche (sull’errore a transitorio esaurito)
Moderazione del controllo (limiti all’intensità dell’azione di controllo)
(*) In realtà è compito del progettista modellare il sistema sotto controllo, eventualmente linearizzare il modello e
scegliere attuatore e trasduttore
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [22]
Stabilità del sistema di controllo
Mettiamo in evidenza la funzione di trasferimento d’anello L(s) = R(s) G(s) e
trascuriamo i disturbi, ininfluenti per la discussione di stabilità:
y° +
-
y
L(s)
Supporremo L(s) funzione di trasferimento di un sistema dinamico strettamente proprio.
Non introduciamo ipotesi sulla stabilità di L.
Il problema si pone nei termini di studiare la stabilità del sistema in anello chiuso,
conoscendo L(s).
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [23]
Polinomio caratteristico
y° +
-
y
L(s)
Esprimiamo la funzione di trasferimento d’anello come rapporto di polinomi :
Ls
N s
Ds
La funzione di trasferimento da y° a y assume l’espressione :
N s
y s
Ls
N s
Ds
N s N s Ds
y s 1 Ls
1
Ds
Definiamo il denominatore di questa funzione di
trasferimento polinomio caratteristico in anello
chiuso :
s N s Ds
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [24]
Polinomio caratteristico
s N s Ds
Il sistema in anello chiuso è asintoticamente stabile se e solo se tutte le radici del
polinomio caratteristico in anello chiuso hanno parte reale negativa
Esempio:
Ls
s2 - s 1
s3 s2 s 1
s s 2 - s 1 s 3 s 2 s 1
s 3 2s 2 2
viola la CN: il sistema non è
asintoticamente stabile
In caso di cancellazioni di poli nel prodotto R(s) G(s), se le radici che si cancellano
non hanno parte reale negativa, il sistema in anello chiuso non può comunque
essere asintoticamente stabile (c’è una parte non raggiungibile e osservabile non
asintoticamente stabile)
Il criterio del polinomio caratteristico non si presta alla sintesi del regolatore, ovvero
a determinare R(s) in modo che il sistema in anello chiuso sia asintoticamente
stabile
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [25]
Criterio di Nyquist
Il criterio di Nyquist è un criterio grafico per discutere la stabilità del sistema in anello
chiuso, nota la risposta in frequenza associata alla funzione di trasferimento d’anello
L(s).
Occorrono delle definizioni:
Diagramma di Nyquist: diagramma polare della risposta in frequenza di L, orientato
nel senso delle crescenti, cui si aggiunge il simmetrico rispetto all’asse reale del
piano complesso
Pd: numero di poli a parte reale strettamente positiva di L(s)
N: numero di giri compiuti dal diagramma di Nyquist intorno al punto -1 dell’asse
reale, contati positivamente in senso antiorario. Se il diagramma passa per il punto
-1, N si dice non definito
Criterio di Nyquist: il sistema in anello chiuso è asintoticamente stabile se e solo se N è
ben definito e risulta N = Pd
Dimostrazione complessa, basata
sulle proprietà delle funzioni
analitiche e sul lemma di Cauchy
condizione necessaria e sufficiente!
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [26]
Criterio di Nyquist
Esempio:
Ls
10
1 s 2
8
6
Pd 0
4
punto -1
Im
2
N 0
0
-2
sistema
asintoticamente stabile
diagramma polare
-4
-6
-8
-2
0
2
4
6
8
10
Re
Verifica:
s 10 1 s s 2 2s 11
2
ha entrambe le radici a parte
reale negativa
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [27]
Criterio di Nyquist
Esempio:
Ls
10
1 s 3
8
6
Pd 0
4
punto -1
Im
2
N -2
0
-2
diagramma polare
imponendo L(j) = -180° si
trova il punto di intersezione
con il semiasse reale negativo,
collocato in -1.25
-4
-6
-8
0
5
sistema non
asintoticamente stabile
10
Re
Verifica:
s 10 1 s s 3 3s 2 3s 11
3
ha due delle tre radici a parte
reale positiva
s1,2 0.07 j1.86,
s3 -3.15
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [28]
Criterio di Bode
Il criterio di Bode è un secondo criterio grafico per la stabilità del sistema in anello
chiuso che si basa sul tracciamento dei diagrammi di Bode della risposta in frequenza
associata alla funzione di trasferimento d’anello L(s).
È valido se sono soddisfatte due condizioni di applicabilità:
L(s) non ha poli a parte reale positiva
Il diagramma di Bode del modulo di L(j) interseca l’asse a 0 dB una e una sola
volta
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [29]
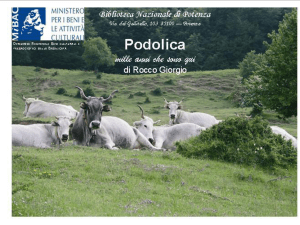
Criterio di Bode
Per applicare il criterio occorre introdurre una serie di definizioni:
Diagramma di Bode - Modulo
Pulsazione critica c :
: |L(j)| = 1
20
dB
c = L(jc)
Margine di fase m :
m = 180° - |c|
Guadagno d’anello L : guadagno di L(s)
-20
10 -1
c
10 0
Diagramma di Bode - Fase
10 1
0
gradi
Fase critica c :
0
-100
m
c
-180
10 -1
Criterio di Bode:
10 0
10 1
il sistema in anello chiuso è asintoticamente stabile se e solo se:
Dimostrazione semplice, come caso
particolare del criterio di Nyquist (con Pd = 0,
esprime le condizioni per cui N = 0)
L 0
m 0
condizione necessaria e sufficiente
(nelle ipotesi di applicabilità)
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [30]
Criterio di Bode
Esempio:
Ls
10
1 s 2
Ipotesi di applicabilità soddisfatte
L > 0
30
20
10
0
dB
si ricava c
approssimativamente dal
diagramma di Bode asintotico
(mai calcolarla analiticamente!)
-10
-20
-30
10 -1
c 3 rad/s
10 0
(rad/s)
10 1
c -2 arctan3 -2 72 -144
m 180 - c 36 0
sistema
asintoticamente stabile
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [31]
Criterio di Bode
Esempio:
Ls
10
1 s 3
Ipotesi di applicabilità soddisfatte
L > 0
20
si ricava c
approssimativamente dal
diagramma di Bode asintotico
10
dB
0
-10
-20
-30
-40
-50
10 -1
c 2 rad/s
10 0
(rad/s)
10 1
c -3 arctan2 -3 64 -192
m 180 - c -18 0
sistema non
asintoticamente stabile
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [32]
Sistemi a fase minima
Si ricorda che un sistema LTI si dice a fase minima se:
ha guadagno positivo
non ha poli a parte reale positiva
non ha zeri a parte reale positiva
Il diagramma di Bode della fase asintotico si ottiene facilmente da quello del modulo.
In ogni tratto:
fase = (pendenza del modulo) × 90°
Conseguenza:
se il modulo taglia l’asse a 0 dB con pendenza
-1 con un ampio tratto, la fase critica sarà
prossima al valore asintotico (-90°).
Diagramma di Bode - Modulo
20
dB
0
c
-20
-40
Diagramma di Bode - Fase
0
Il sistema in anello chiuso, essendo m >> 0,
sarà asintoticamente stabile
gradi
-50
-100
10 0
10 1
(rad/s)
10 2
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [33]
Sistemi con ritardo
Il ritardo di tempo è un sistema retto dall’equazione:
y t ut -
La funzione di trasferimento è:
Gs e -s
La risposta in frequenza:
Diagramma di Bode - Modulo
dB
0
G j e - j
G j e - j 1
G j e - j -
Diagramma di Bode - Fase
0
gradi
-200
-400
-600
(rad/s)
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [34]
Sistemi con ritardo
Se la funzione di trasferimento d’anello è il prodotto di una razionale e di un ritardo:
Ls Lr s e -s
Risulta :
L j Lr je - j Lr j e - j Lr j
L j Lr je - j Lr j e - j Lr j -
Pertanto:
c cr
c cr - c
(la pulsazione critica si determina dalla
parte razionale)
180
contributo dovuto al ritardo
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [35]
Sistemi con ritardo
Esempio:
Ls
si ricava c
approssimativamente dal
diagramma di Bode asintotico
Ipotesi di applicabilità soddisfatte
L > 0
20
10
0
dB
c 1rad/s
10
e -s , 0.
1 s 1 10s
-10
-20
-30
-40
-50
10 -2
10 -1
10 0
10 1
(rad/s)
180
1
1
c - arctan
-84 - 45 - 57 -129 - 57
- arctan - c
0.1
1
m 180 - c 180 - 129 57 51 - 57
sistema asintoticamente
stabile per < 0.89
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [36]
Prestazioni dinamiche
Le prestazioni dinamiche fanno riferimento al comportamento del sistema
di controllo durante i transitori.
In particolare sono di interesse:
Velocità di risposta : rapidità con cui la variabile controllata segue
brusche variazioni (per esempio a scalino) del riferimento
Smorzamento dei transitori: assenza o irrilevanza di oscillazioni nel
transitorio
Reiezione dei disturbi: capacità del sistema di controllo di inseguire il
riferimento pur in presenza di disturbi
Moderazione del controllo: la variabile di controllo non deve essere
sottoposta a eccessive sollecitazioni
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [37]
Velocità di risposta
Il concetto di velocità di risposta di un sistema dinamico si può esprimere anche
nel dominio della frequenza.
Consideriamo un sistema a costante di tempo:
H s
1
,T 0
1 sT
risposta allo scalino
diagramma di Bode
5
1
0
H
0.8
-5
dB
0.6
0.4
-15
0.2
0
-10
-20
T
-25
0
t (sec)
(rad/s)
Il sistema è tanto più veloce quanto più piccola è la costante di tempo T, ovvero
quanto più ampia è la banda passante definita da H = 1/T
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [38]
Banda passante del sistema di controllo
Consideriamo un sistema di controllo in anello chiuso, ed in particolare la funzione
di trasferimento dal riferimento y° alla variabile controllata y:
Y s
Y s
o
F s
Andamento plausibile del modulo di F:
10
Se risulta:
3
0
-3
F j dB 3,
dB
-10
-20
definiamo banda passante del sistema di
controllo:
-30
-40
b
-50
: F j
dB
-3 0, b
(rad/s)
L’estremo superiore della banda passante b è quindi un indicatore della velocità di
risposta: maggiore è b , più pronto è il sistema.
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [39]
Banda passante e pulsazione critica
È possibile individuare un indice di velocità di risposta legato alla funzione di
trasferimento d’anello L(s), piuttosto che alla funzione di trasferimento in anello chiuso
F(s)?
L j
F j
1 L j
Ls
F s
1 Ls
F j
L j
1 L j
Consideriamo l’approssimazione:
F j
L j
1 L j
1
: L j 1
L j : L j 1
Se è applicabile il criterio di Bode:
1
c
F j
L j c
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [40]
Banda passante e pulsazione critica
40
1
c
F j
L j c
20
0
|L|
?
c
|F|
dB
-20
-40
-60
-80
(rad/s)
Sotto quali condizioni l’approssimazione grafica sopra riportata è attendibile?
Se lo fosse, la banda passante del sistema in anello chiuso sarebbe ben approssimata
dalla pulsazione critica…
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [41]
Banda passante e pulsazione critica
Calcoliamo esattamente il modulo di |F| alla pulsazione critica:
F jc
L jc
1 L jc
1
1 e jc
1
1 cos c j sin c
1
2
1 cos c 2 cos c sin c
2
1
21 cos c
1
21 - cos m
1
2 sin m
2
Se m = 90° risulta:
F jc
1
2
F jc dB -3
L’estremo della banda passante
coincide con la pulsazione critica
Se m > 60° risulta:
F jc 1 F jc dB 0
L’estremo della banda passante è
ben approssimato dalla pulsazione
critica e non vi è risonanza
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [42]
Banda passante e pulsazione critica
Possiamo quindi procedere alla seguente approssimazione:
m “elevato” (> 50°÷60°)
F s
1
1 s c
a
4 .6
c
Tempo di assestamento al 99%
della risposta allo scalino
m “piccolo” (< 30°÷40°)
F s
c2
s 2 2 c s c2
a
4 .6
c
tiene conto della risonanza nel
sistema (|F(jc)| > 1)
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [43]
Smorzamento e margine di fase
Come determinare lo smorzamento nel caso di margine di fase piccolo?
F s
c2
s 2 2 c s c2
Imponiamo che in c il modulo dell’approssimante assuma il valore esatto
precedentemente calcolato
(per m espresso in gradi)
F jc
1
2
1
2 sin m
2
sin m m
2 100
Lo smorzamento dei transitori in anello chiuso è quindi legato al margine di fase
m
indicatore di robustezza della stabilità
indicatore del “grado di stabilità” dei transitori
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [44]
Calcolo della risposta allo scalino: esempio
Ls
100
s 1 0.0025s
2
Vogliamo determinare l’andamento qualitativo della risposta
di y a uno scalino in y°
40
si traccia il diagramma di Bode del modulo
asintotico
si determina c = 100 rad/s
si determina m:
30
20
0
100
m 180 - c 180 - - 90 - 2 arctan
400
-10
-20
180 - - 90 - 2 14 62
-30
-40
0
10
1
2
10
10
3
10
1
w (rad/s)
1
Poiché m è elevato si sceglie F s 1
s
1 0.01s
l’approssimazione:
1
c
0.8
0.6
y
dB
10
0.4
0.2
0
0
0.01
0.02
0.03
0.04
0.05
0.06
0.07
t (s)
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [45]
Reiezione dei disturbi in linea d’andata
Consideriamo un disturbo d in linea d’andata:
y° +
-
L(s)
+
d
+y
Funzione di trasferimento da d a y:
Y s
1
S s
Ds
1 Ls
S(s): funzione di sensitività
Approssimiamo il modulo della risposta in frequenza:
1
S j
1 L j
1
L j
1
: L j 1
: L j 1
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [46]
Reiezione dei disturbi in linea d’andata
Nelle ipotesi di validità del criterio di Bode:
1
S j
1 L j
1
L j
1
40
20
|L|
|1/L|
c
dB
0
-20
|S|
-40
-60
-80
(rad/s)
c
c
Le componenti armoniche del
disturbo interne alla banda
passante sono attenuate sulla
variabile controllata.
Quindi:
la banda passante deve essere
sufficientemente ampia da
contenere le armoniche
significative del disturbo
più alto è il modulo di L in banda
passante, maggiore è
l’attenuazione
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [47]
Reiezione dei disturbi in linea di retroazione
Consideriamo un disturbo n in linea di retroazione:
y° +
-
L(s)
y
+ +
n
F s Ss 1
Funzione di trasferimento da n a y:
Y s
Ls
-F s N s
1 Ls
F(s): funzione di sensitività complementare
Sappiamo già approssimare il modulo della risposta in frequenza:
F j
L j
1 L j
1
: L j 1
L j : L j 1
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [48]
Reiezione dei disturbi in linea di retroazione
Nelle ipotesi di validità del criterio di Bode:
1
c
F j
L j c
Le componenti armoniche del
disturbo esterne alla banda
passante sono attenuate sulla
variabile controllata.
Quindi:
la banda passante non deve
essere eccessivamente ampia
da contenere le armoniche
significative del disturbo
più piccolo è il modulo di L fuori
dalla banda passante, maggiore
è l’attenuazione
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [49]
Moderazione del controllo
Mettiamo in evidenza la variabile di controllo u in uno schema in anello chiuso:
y° +
-
R(s)
u
G(s)
d
+ +y
+ +
n
Funzione di trasferimento da y° a u:
U s
R s
Qs
Y s
1 Ls
funzione di sensitività del controllo (a meno del segno,
è la stessa
prendendo come
Approssimiamo il modulo della risposta in frequenza:
ingresso d o n)
1
: L j 1
R j
Q j
G j
è bene che Q attenui su
1 L j
R j : L j 1
tutta la banda
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [50]
Moderazione del controllo
Nelle ipotesi di validità del criterio di Bode:
Q j
R j
1 L j
1
G j
R j
: c
: c
40
20
|G|
|1/G|
G
c
0
dB
-20
-40
-60
-80
(rad/s)
Fuori dalla banda passante il modulo
di R deve assumere valori contenuti.
Ipotizziamo un andamento per il
diagramma di |G|.
Se c è molto più grande della
banda del sistema in anello aperto
G, il modulo di 1/G, e quindi di Q,
può aumentare molto.
Quindi:
la banda passante non deve
essere eccessivamente ampia
rispetto alla banda che
caratterizza la dinamica in anello
aperto.
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [51]
Prestazioni statiche
Le prestazioni statiche di un sistema di controllo fanno riferimento al suo
comportamento a transitorio esaurito
In particolare siamo interessati, in questa condizione, all’errore tra il segnale di
riferimento e la variabile controllata, cercando le condizioni per cui questo errore
è nullo, o finito ma non nullo, o infinito
Naturalmente dovremo supporre l’asintotica stabilità del sistema in anello chiuso
Nell’analisi dell’errore sfrutteremo il principio di separazione degli effetti, per cui
considereremo separatamente il contributo dei singoli ingressi (riferimento e
disturbi)
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [52]
Prestazioni statiche
Facciamo riferimento a una riformulazione dello schema a blocchi che mette in
evidenza l’errore e = y° - y
y° +
-
L(s)
d
+ +y
y° +
-
n
e+ -
L(s)
d
+ +y
+ +
n
Attribuiremo agli ingressi segnali canonici (scalino, rampa, parabola),
rappresentativi di generici segnali a regime costanti, lineari oppure parabolici con il
tempo.
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [53]
Errore dovuto al segnale di riferimento
La funzione di trasferimento dal riferimento all’errore è:
E s
1
S s
Y s 1 Ls
Posto:
Ls
L
s gL
funzione di sensitività
1 sT
1 s
i
i
k
k
1
e lim et limsE s lims
Y s lims
t
s 0
s 0 1 Ls
s 0
1 L
s gL
s g L 1
1
lims
Y s lim g
Y s
L
L
s 0
s
0
s L
1 g
s L
si ha:
1
Y s
1 sTi
i
1 sk
k
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [54]
Errore dovuto al segnale di riferimento
y°(t) = Asca(t)
s g L 1 A
e lim g
s 0 s L s
L
A,
gL 0
g
s L
A
lim A g
, gL 0
s 0 s L
1 L
L
gL 1
0,
y°(t) = Aram(t)
s
A
s
e lim g
lim A g 1
s 0 s L s 2
s 0 s L
s
L
L
g L 1
gL
, g L 0
A
, gL 1
L
0, g L 2
y°(t) = Apar(t)
s
A
e lim g
s 0 s L s 3
L
g L 1
, g L 1
A
s
lim A g 2
, gL 2
2
s 0 s L
s L L
0, g L 3
gL
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [55]
Errore dovuto al segnale di riferimento
Il caso gL <0 non è di interesse (errore infinito o tutt’al più uguale al segnale di
riferimento, se costante).
Per valori gL 0 si può compilare una tabella:
gL
Asca(t)
Aram(t)
Apar(t)
0
A
1 L
0
A
L
0
A
L
1
2
0
L’errore è nullo
L’errore è tanto più piccolo
quanto più grande è L
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [56]
Errore dovuto al disturbo d
La funzione di trasferimento dal disturbo in linea d’andata all’errore è:
E s
1
-S s
Ds
1 Ls
A meno del segno è la stessa considerata prima, per cui vale la stessa tabella
ricavata prima, a meno del segno.
Esempio:
Ls
10 1 s
s 1 10s
L 10, g L 1
sistema in anello chiuso asintoticamente stabile
A sca t ,
d t A ramt ,
A part ,
e 0
A
e
10
e
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [57]
Errore dovuto al disturbo d
Se il disturbo non entra nello schema a blocchi del sistema di direttamente in uscita
alla funzione di trasferimento del processo, per poter utilizzare ancora la tabella
delle prestazioni statiche, occorre “riportare” il disturbo in uscita.
d
y° +
-
y° +
-
H(s)
e
L(s)
+
y° +
-
+y
e
L(s)
dH
+ +y
DH s
d
+ +
e
R(s)
y
G(s)
y° +
-
e
L(s)
H
s
gH
Ds
dG
+ +y
DG s
G
s
gG
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [58]
Ds
Errore dovuto al disturbo n
La funzione di trasferimento dal disturbo in linea di retroazione all’errore è:
E s
Ls
F s
N s 1 Ls
Posto:
Ls
L
s gL
funzione di sensitività complementare
1 sT
1 s
i
i
k
k
si ha:
L
gL
Ls
s
e lim et limsE s lims
N s lims
N s
t
s 0
s 0 1 Ls
s
0
1 L
s gL
Ls
lim g
N s
s 0 s L
L
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [59]
Errore dovuto al disturbo n
n(t) = Asca(t)
Ls A
L A L , g L 0
e lim g
lim A g
1 L
s 0 s L s
s 0 s L
L
L
gL 1
A,
n(t) = Aram(t)
Ls
L
A
e lim g
lim A g 1
,g L 0
s 0 s L s 2
s 0 s L
L s
L
n(t) = Apar(t)
Ls
L
A
e lim g
lim A g 2
,g L 0
2
s 0 s L s 3
s 0 s L
L s
L
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [60]
Errore dovuto al disturbo n
Possiamo compilare una tabella:
gL
Asca(t)
0
A
L
1 L
Aram(t)
Apar(t)
1
A
2
A
L’errore è uguale o quasi uguale (se
gL=0) all’ampiezza del disturbo
L’errore è sempre infinito
In presenza di un trasduttore con errore statico, il sistema di controllo non può
garantire a regime una precisione migliore di quella del trasduttore.
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [61]
Progetto del controllore
Terminata l’analisi delle prestazioni dei sistemi di controllo in anello chiuso, torniamo al
problema di progetto del controllore
y° +
-
R(s)
G(s)
d
+ +y
+ +
n
Il metodo che seguiremo sarà basato sul criterio di Bode
La funzione di trasferimento d’anello L(s) = R(s)G(s) deve soddisfare le ipotesi
necessarie per l’applicabilità del criterio
Il metodo non è applicabile se G(s) ha poli a parte reale positiva.
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [62]
Specifiche di progetto
y° +
-
R(s)
G(s)
d
+ +y
+ +
n
Le specifiche di progetto precedentemente elencate possono essere formalizzate come
segue:
Stabilità asintotica
m 0
Robustezza della stabilità e grado di stabilità
m m
Velocità di risposta
c c
Prestazioni statiche
e e
Eventuali specifiche addizionali
…….
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [63]
Impostazione del progetto
È opportuno suddividere il progetto del controllore in due fasi:
Progetto statico
si affronta solo la specifica relativa all’errore a transitorio esaurito
nell’eseguirlo si assume che si sia in grado di rendere asintoticamente stabile il
sistema di controllo in anello chiuso
Progetto dinamico
si affrontano le restanti specifiche, e in particolare quelle relative alla pulsazione
critica e al margine di fase
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [64]
Progetto statico
Si fattorizza la funzione di trasferimento del regolatore come:
Rs R1s R2 s
R1s
determina le
prestazioni statiche
R
s gR
,
1 sT
R s
1 s
i
i
k
k
2
è ininfluente, poiché
R2(0) = 1
Si sceglie:
il valore minimo del tipo gR che consente di soddisfare la specifica statica
fissato gR, il valore minimo del guadagno R per cui la specifica è effettivamente
soddisfatta
Se R risulta indeterminato lo si assegna in fase di progetto dinamico.
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [65]
Progetto dinamico
Rs R1s R2 s
R1s
R
s gR
,
1 sT
R s
1 s
i
i
k
k
2
determinato nel
progetto statico
da determinare nel
progetto dinamico
Si determina R2(s), ovvero le costanti di tempo di zeri e poli del regolatore, con un
metodo grafico, facendo in modo che, con una serie ragionata di tentativi, il diagramma
della risposta in frequenza di L(s) soddisfi tutte le specifiche dinamiche.
Il metodo sarà illustrato per mezzo di un esempio.
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [66]
Esempio di progetto: dati e specifiche
d
y° +
-
Gs
H(s)
e
R(s)
50
,
1 0.1s 1 s 1 10s
H s
G(s)
+
+y
5
1 0.01s
Specifiche:
|e| ≤ 0.025, per y°(t) = 10 sca(t), d(t) = ±sca(t)
c 1 rad/s
m 60°
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [67]
Esempio di progetto: progetto statico
Errore dovuto al segnale di riferimento:
1
1
10
o
o
o
e lim sE s lims
Y s lims
s 0
s 0 1 Ls
s 0 1 50 R s
s gR
10
, gR 0
10s g R
(coerente con la tabella di
lim g
1 50 R
precisione statica, con L=50R,
s 0 s R 50
R
0,
gR 1
A=10)
Errore dovuto al disturbo:
- H s
- 5 1
ed limsE d s lims
Ds lims
50
s 0
s 0 1 Ls
s
0
R s
1
s gR
5
, g R 0 (coerente con la tabella di
5s g R
lim g
1
50
R
s 0 s R 50
precisione statica, con L=50R,
R
0,
gR 1
A=H=5)
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [68]
Esempio di progetto: progetto statico
Poiché l’errore deve essere finito, ma non necessariamente nullo, si può prendere un
regolatore di tipo nullo: gR = 0
R è senz’altro positivo!
Quindi:
e eo ed eo ed
10
5
15
1 50 R 1 50 R 1 50 R
La specifica è quindi soddisfatta se:
15
0.025
1 50 R
R
Adottando un margine di
sicurezza (per robustezza
verso incertezze sui guadagni
e ampiezza del disturbo):
15 - 0.025
12
1.25
R 20
R1s
R
s
gR
20
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [69]
Esempio di progetto: progetto dinamico
La funzione di trasferimento d’anello del sistema può essere scritta come:
Ls R1s R2 s Gs R2 s L1s
parte di L(s) nota a valle del
progetto statico
con:
L1s R1s Gs
1000
1 0.1s 1 s 1 10s
Primo tentativo:
60
R2 s 1 Ls L1s
40
dB
20
c 1
0
m 0
-20
-40
occorre quindi procedere con un
progetto dinamico…
-60
-80
10 -2
10 -1
10 0
(rad/s)
10 1
10 2
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [70]
Esempio di progetto: progetto dinamico
Ricordiamo che per i sistemi con funzione di trasferimento d’anello a fase minima:
Diagramma di Bode - Modulo
il taglio da parte del diagramma del modulo
dell’asse a 0 dB con pendenza -1 è di norma
garanzia di margine di fase elevato
20
c
dB
0
-20
-40
Diagramma di Bode - Fase
0
gradi
-50
-100
10 0
10 1
(rad/s)
10 2
Conviene allora procedere determinando preliminarmente un opportuno andamento
per il diagramma del modulo di L e, a posteriori, risalire all’espressione della
funzione di trasferimento del regolatore
metodo grafico di progetto
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [71]
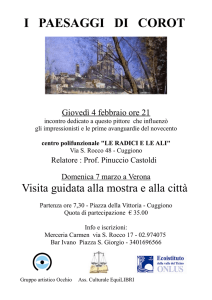
Esempio di progetto: progetto dinamico
Metodo grafico di progetto di |L| (loopshaping):
si traccia un tratto di retta a pendenza -1 che taglia l’asse a 0 dB a un valore di
pulsazione superiore o uguale al limite inferiore richiesto per la pulsazione critica
in bassa frequenza:
il diagramma di |L| deve avere la stessa pendenza di quello di |L1|
(altrimenti si modificherebbe il tipo del regolatore in sede di progetto dinamico)
se il progetto statico si è concluso con un vincolo sul valore del guadagno R, il
valore di |L| deve essere maggiore o uguale a quello di |L1|
(altrimenti si modificherebbe il guadagno del regolatore in sede di progetto dinamico)
in alta frequenza:
il diagramma di |L| deve avere pendenza maggiore o uguale in modulo a quella
di |L1|
(altrimenti si perverrebbe al progetto di un regolatore non realizzabile (con più zeri che poli))
il valore di |L| deve essere minore o uguale a quello di |L1|
(per garantire la moderazione del controllo)
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [72]
Esempio di progetto: progetto dinamico
Seguiamo il metodo grafico per il nostro esempio:
80
Secondo tentativo:
60
tagliamo l’asse a 0 dB con
pendenza -1 a 2 rad/s
L1
40
L
modulo [dB]
20
in bassa frequenza
raccordiamo il diagramma di
|L| con quello di |L1|
c
0
-20
in alta frequenza uguagliamo
la pendenza di |L| con quella
di |L1| e manteniamo |L| sotto
a |L1|
-40
-60
-80
-4
10
10
c 2
-3
10
-2
10
-1
10
rad/s
0
10
1
10
2
m 180 - - arctan2 0.002 - 2 arctan2 10
180 - - 90 - 2 11 68
tutte le specifiche sono
soddisfatte!
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [73]
Esempio di progetto: progetto dinamico
Dal diagramma del modulo di L risaliamo, tenendo conto che è a fase minima,
all’espressione di L(s):
Ls
1000
s
s
1
1
0
.
002
10
2
1000
1 500s 1 0.1s 2
quindi:
R2 s
1 0.1s 1 s 1 10s 1 s 1 10s
Ls
1000
1 500s 1 0.1s
L1s 1 500s 1 0.1s 2
1000
e infine:
R s R1s R2 s 20
1 s 1 10s
1 500s 1 0.1s
risultato finale del progetto
A posteriori possiamo osservare che il regolatore cancella i poli a pulsazione 0.1 e 1
del sistema sotto controllo, introducendone due a pulsazione 0.002 e 10.
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [74]
Specifiche di attenuazione di disturbi
Tra le specifiche di progetto possono apparire anche requisiti sull’attenuazione di
disturbi, in linea d’andata o in linea di retroazione.
Questi requisiti si possono tradurre in ulteriori vincoli sulla risposta in frequenza della
funzione di trasferimento d’anello, di cui bisogna tenere conto in sede di progetto
dinamico.
Vediamo separatamente come occorre trattare i disturbi in linea d’andata e quelli in
linea di retroazione.
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [75]
Attenuazione di disturbi in linea d’andata
Dato: disturbo d(t) con componenti armoniche significative nella banda [0, max]
Specifica: disturbo attenuato sull’uscita y di un fattore A (A > 1)
Soluzione:
y° +
-
Funzione di trasferimento da d a y:
Y s
1
S s
Ds
1 Ls
Y j
1
D j
1 L j
+
L(s)
50
Si genera un’area
che il diagramma
di |L| deve evitare
40
30
|L|
AdB
20
max
10
dB
d
+y
0
-10
-20
-30
1
1 L j
max
1
A
L j
max
A
-40
-50
-1
10
0
1
10
10
w (rad/s)
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [76]
2
10
Attenuazione di disturbi in linea di retroazione
Dato: disturbo n(t) con componenti armoniche significative nella banda [min, ]
Specifica: disturbo attenuato sull’uscita y di un fattore A (A > 1)
y° +
Soluzione:
-
L(s)
Funzione di trasferimento da n a y:
Y s
Ls
-F s N s
1 Ls
+ +
n
50
40
30
L j
Y j N j
1 L j
|L|
20
10
Si genera un’area
che il diagramma
di |L| deve evitare
dB
y
min
0
-10
-AdB
-20
-30
L j
1 L j
min
1
A
L j
min
-40
1
A
-50
-1
10
0
1
10
10
w (rad/s)
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [77]
2
10
Compensazione dei disturbi
Nei sistemi di controllo è frequente il caso in cui il disturbo in linea d’andata sia
misurabile
È allora possibile sfruttare l’informazione data dalla misura e agire direttamente sulla
variabile di controllo, anticipando l’effetto del disturbo sull’uscita, senza attendere
che questo si manifesti in errore
Si parla in questo caso di compensazione diretta del disturbo
d
d
C(s)
H(s)
u
G(s)
+
H(s)
+ y
u
G(s)
+
+ y
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [78]
Compensazione dei disturbi
Il compensatore del disturbo può essere progettato in modo che:
d
C(s)
Y s
H s C s Gs 0
Ds
H(s)
u
C s -
H s
Gs
G(s)
+
+ y
Questa formula non può in genere essere direttamente utilizzata perché può dare luogo
a un compensatore non realizzabile (più zeri che poli) o instabile (se G(s) è a fase non
minima).
Tuttavia si può fare riferimento a questa formula per la compensazione di specifici
disturbi
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [79]
Compensazione dei disturbi
Disturbo costante a regime:
C s C -
H 0
G0
Disturbo sinusoidale di pulsazione :
C s : C j -
H j
G j
(si parametrizza C(s) e si impone il valore di
risposta in frequenza alla pulsazione data)
Disturbo con armoniche significative fino alla pulsazione :
C s : C j -
H j
,
G j
(si approssima la risposta in frequenza fino
alla pulsazione massima di interesse)
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [80]
Compensazione dei disturbi
Di norma uno schema di compensazione viene associato a uno schema di retroazione
d
C(s)
H(s)
y° +
-
e
u
R(s)
G(s)
+
+ y
La funzione di trasferimento da d a y è ora:
Y s H s C s Gs
0
Ds
1 R s Gs
C s -
H s
Gs
la stessa ottenuta in
anello aperto!
I progetti del regolatore in retroazione e del compensatore in anello aperto sono quindi
disaccoppiati
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [81]
Compensazione del riferimento
Anche il segnale di riferimento può essere elaborato con un sistema dinamico per
favorire un’azione di controllo più pronta, in uno schema di compensazione del segnale
di riferimento:
C(s)
yo
Y s
Y o s
R(s)
u
G(s)
y
R s Gs C s Gs
1 R s Gs
Se:
1
C s
Gs
Y s
Y s
o
1
risultato ideale, che si
può approssimare:
C s : C j
non fisicamente
realizzabile!
1
, max
G j
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [82]
Prefiltraggio del riferimento
Alternativamente si può usare uno schema di prefiltraggio del segnale di riferimento:
yo
Y s
Y o s
-
C(s)
C s F s , F s
R(s)
u
G(s)
y
R s Gs
1 R s Gs
Possibili scelte del prefiltro:
C s C
1
F 0
1 s c
C s
1 s b
b c
Y s
Y s s 0
o
Y s
1
1
Y o s 1 s b
per forzare la precisione statica
(nominale)
per ampliare la banda passante
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [83]
Compensazione e prefiltraggio del riferimento
La compensazione e il prefiltraggio possono essere usati in combinazione:
C2(s)
yo
C1(s)
-
R(s)
u
G(s)
y
C1s Rs C2 s Gs
1 R s Gs
Y o s
Y s
C1s F s , C2 s F s Gs
o
o
-1
Y s
Y o s
F o s
modello di
riferimento
Requisiti su Fo(s):
guadagno unitario
grado relativo almeno pari a quello di G(s)
deve contenere gli eventuali zeri a parte reale
positiva di G(s)
N.B.:
grado relativo =
numero poli – numero zeri
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [84]
Controllo in cascata
In molte applicazioni avviene che il sistema sotto controllo sia strutturabile nella
connessione in serie di due funzioni di trasferimento:
d
u
G1(s)
v
G2(s)
y
all’uscita del primo sottosistema si
sommi un disturbo d
la variabile intermedia v tra i due
sottosistemi sia misurabile
Spesso avviene che la dinamica di G1 sia molto più favorevole di quella di G2:
G1 potrebbe essere a fase minima e G2 no
pur essendo entrambe le funzioni di trasferimento a fase minima, G1 potrebbe avere
dinamica molto più veloce rispetto a G2
Questo accade in particolare quando G1 rappresenta l’attuatore e G2 il sistema sotto
controllo.
In queste situazioni può risultare opportuno strutturare il sistema di controllo con due
anelli di controllo innestati.
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [85]
Controllo in cascata
d
yo
-
R2(s)
vo
-
R1(s)
u
G1(s)
v
G2(s)
y
Regolatore interno R1
si basa esclusivamente sulla funzione di trasferimento G1(s)
mira a far sì che v insegua il suo riferimento vo su un’ampia banda
sulla stessa banda attenua il disturbo d
Regolatore esterno R2
limita la banda a valori decisamente inferiori rispetto alla banda dell’anello interno
si approssima, su questa banda, la dinamica dell’anello interno come infinitamente
veloce (v vo)
si basa il progetto di R2 esclusivamente sulla funzione di trasferimento G2(s)
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [86]
Controllo in cascata
yo
-
R2(s)
vo
v
G2(s)
y
I due regolatori R1 e R2 vengono progettati secondo un disaccoppiamento in frequenza
semplificazione del progetto (suddiviso in due sottoprogetti più semplici)
prestazioni di norma molto superiori al progetto di un unico regolatore
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [87]
Controllori PID
I controllori PID (ad azione Proporzionale, Integrale e Derivativa) sono caratterizzati
dalla legge di controllo:
t
u t K P et K I ed K D
0
det
dt
KP: guadagno proporzionale
KI: guadagno integrale
KD: guadagno derivativo
Equivalentemente:
t
1
det
u t K P et
ed TD
TI
dt
0
KP
KI
K
TD D
KP
TI
tempo integrale
tempo derivativo
I PID sono di gran lunga i controllori più utilizzati nelle applicazioni, anche in quelle in
ambito meccatronico.
Sono in particolare utilizzati i controllori P, PD, PI e PID.
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [88]
PID: funzione di trasferimento
I PID sono sistemi lineari e come tali se ne può ricavare la funzione di trasferimento:
e
u
R(s)
K P 1 sTI s 2TITD
KI
1
R s K P
K D s K P 1
sTD
s
s
sTI
TI
Il fatto che il numeratore della funzione di trasferimento sia di grado superiore a quello
del denominatore dipende dall’azione derivativa che non è fisicamente realizzabile.
Nella realizzazione pratica del controllore occorre aggiungere un polo in alta frequenza
nell’azione derivativa (peraltro irrilevante per gli effetti dinamici).
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [89]
PID: metodi di taratura
I PID sono sistemi di grande diffusione, per una serie di ragioni:
semplicità di realizzazione in diverse tecnologie (elettronica, idraulica, pneumatica)
efficacia per la regolazione di un’ampia gamma di processi industriali
standardizzazione con i relativi vantaggi in termini di affidabilità e economicità
semplicità di taratura dei parametri
possibilità di taratura automatica dei parametri, per mezzo di semplici esperimenti
La taratura dei controllori PID può quindi essere eseguita in due modi:
taratura analitica (basata sul modello del sistema sotto controllo e sulla teoria
dei controlli automatici)
taratura automatica (o empirica, basata solo su esperimenti)
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [90]
PID: taratura analitica
Nella taratura analitica dei regolatori PID si può seguire una via più diretta rispetto a
quella vista per il regolatore a struttura libera.
Esempio:
y° +
-
e
y
R(s)
G(s)
e -3s
Gs 0.1
1 5s 1 20s
Specifiche:
e = 0, per y°(t) = sca(t)
m 40°
c massima possibile
Dalla specifica statica si deduce che occorre l’azione integrale.
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [91]
PID: taratura analitica
Scriviamo R(s) nella forma:
R s R
1 sT1 1 sT2
s
Cancelliamo con gli zeri del regolatore i poli del processo:
Ls R s Gs
T1 5, T2 20
0.1 R -3s
e
s
Pertanto:
c 0.1R
c -90 - c
50
R 2.9
2.91
0.3 180
In conclusione:
K P 72.5
2
K I 2.9
KI
1 5s 1 20s
100s 25s 1
R s 2.9
2.9
KP
K Ds
K 290
s
s
s
D
m 90 - 0.3 R
180
40
180
180
-90 - 0.3 R
R
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [92]
PID: taratura empirica
I metodi di taratura empirica dei controllori PID sono basati esclusivamente
sull’esecuzione di esperimenti sul sistema sotto controllo, secondo opportune
procedure.
Non richiedono quindi né la conoscenza del modello matematico del sistema sotto
controllo, né l’applicazione della teoria dei controlli automatici
Oggi esistono numerosissime regole per la taratura automatica (autotuning) dei PID
Noi vedremo le regole originali, dovute a Ziegler e Nichols, nella loro versione ad
anello aperto e ad anello chiuso.
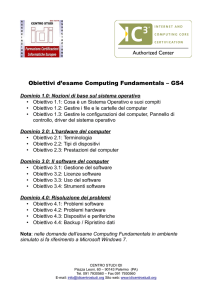
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [93]
PID: regole di Ziegler e Nichols in anello chiuso
y° +
-
1. Si chiude l’anello di controllo con il regolatore
PID, imponendo nulli tutti i guadagni
e
y
PID
S
2. Partendo da valori molto piccoli di KP si effettua
un semplice esperimento, consistente
nell’applicare un piccolo scalino al segnale di
riferimento
3. Si aumenta progressivamente KP ripetendo di volta in
volta l’esperimento finché non si instaura nell’anello
un’oscillazione permanente
-
T
y
4. Si ricavano:
KP: guadagno proporzionale all’oscillazione
T: periodo dell’oscillazione
t
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [94]
PID: regole di Ziegler e Nichols in anello chiuso
Con i valori di KP e T determinati sperimentalmente si tara un regolatore P, un
PI o un PID secondo la seguente tabella
KP
TI
TD
P
0.5K P
-
-
PI
0.45K P
T
1 .2
-
PID
0.6K P
T
2
T
8
Il metodo non è sempre applicabile: ci sono infatti sistemi che non generano
oscillazioni, anche con guadagni proporzionali elevati.
Altre volte può essere pericoloso, o comunque sconsigliabile, portare il
sistema al limite di stabilità
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [95]
PID: regole di Ziegler e Nichols in anello aperto
1. Si applica una variazione a scalino all’ingresso
del sistema sotto controllo
u
y
S
y
2. Si traccia la tangente alla risposta nel punto di
flesso
3. Si individuano graficamente le intercette e Y della tangente sugli assi t e y,
rispettivamente:
0
Y
t
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [96]
PID: regole di Ziegler e Nichols in anello aperto
Con i valori di e Y determinati sperimentalmente si tara un regolatore P, un PI
o un PID secondo la seguente tabella
KP
TI
TD
P
1
Y
-
-
PI
0 .9
Y
3
-
PID
1 .2
Y
2
0.5
Il metodo non è applicabile se la risposta allo scalino non presenta flesso o
se la risposta presenta oscillazioni
Non sempre è possibile operare sul processo in anello aperto, o perturbare
bruscamente il suo ingresso
Controlli automatici – Progetto nel dominio della frequenza - P. Rocco [97]