Il problema dei due corpi
La dinamica planetaria
La Meccanica Classica
Lagrange
Hamilton
Jacobi
Vettori
Per rendere conto della 3-dimensionalità in fisica, e in matematica, si usano
delle grandezze più complesse dei semplici numeri i vettori
Per lo spazio, che ha 3 dimensioni, un vettore è un “oggetto” matematico a
tre componenti. In questo modo si può rappresentare non solo la sua
“intensità” (il modulo) ma anche il punto dello spazio verso cui è orientato.
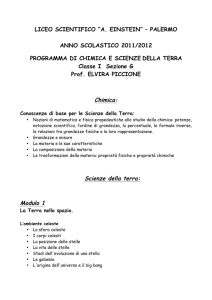
Prodotto vettoriale
Il prodotto vettoriale tra due
vettori, orientati, fornisce un terzo
vettore anche lui orientato
Se il sistema di coordinate in cui è
rappresentato il vettore è un
sistema cartesiano il prodotto
vettoriale di due vettori che
giacciono su di un piano produce
un vettore perpendicolare al piano
stesso
Il problema dei due corpi
1. Il calcolo del problema dei due corpi si può trasformare ad un “problema
ridotto” dei due corpi ad un corpo solo se si lavora nel centro di massa
del sistema
2. Fondamentale è la dipendenza da 1/r2 della forza di gravità che classifica
il problema come quello del moto in “un campo di forze centrali”
3. Determinante è l’individuazione degli “integrali primi del moto” che
dipendono dai principi conservativi in un campo di forze centrali
•
Conservazione dell’impulso
•
Conservazione del momento angolare
•
Conservazione dell’energia
4. In prima approssimazione l’orbita di un pianeta si può calcolare
considerando la massa del pianeta trascurabile rispetto a quella del Sole
e trascurando le perturbazioni di tutti glia altri pianeti e corpi del Sistema
solare
Conservazione dell’impulso
L’impulso è definito come il prodotto tra la velocità e la massa. Per un
sistema di N punti materiali si definisce come:
N
N
1
1
P = ∑ pi = ∑ m v i
E la sua conservazione si esprime come la sua costanza nel tempo cioè
N
d
d
P = ∑ m vi = 0
dt
dt
1
Questo equivale alla ipotesi di invarianza per traslazioni spaziali
Nel caso del moto dei pianeti si può tranquillamente considerare valido il
principio della relatività galileiana NON sono quindi presenti effetti
relativistici
Conservazione del momento angolare
Il momento angolare riguarda invece le proprietà del sistema di punti
materiali riguardanti le rotazioni. Momento angolare è definito come:
L = r×P
E la sua conservazione si esprime come la sua costanza nel tempo cioè
dL
=0
dt
Questo equivale alla ipotesi di invarianza per rotazioni cioè all’isotropia dello spazio
Nel caso del moto dei pianeti questo comporta che il moto di un pianeta attorno al Sole
avviene in un piano detto “piano dell’orbita”
Conservazione dell’energia
La conservazione dell’energia è basata sulla definizione di Energia Totale.
Questa a sua volta richiede, nel caso in cui trascuriamo gli “effetti
dissipativi” (attrito, viscosità, conduzione etc..) la definizione di due
termini:
1) Energia cinetica = K = ½ m v
2
2) Energia potenziale = (nel caso di un punto materiale m1 soggetto alla
forza gravitazionale di una massa m2 ) = V(r)= G m1 m2/r
L’Energia Totale è la somma di questi due termini E = T + V
La conservazione a sua volta si basa sulla costanza di E cioè sul fatto che
dE d ( K + T )
=
= 0 ⇒ E = costante
dt
dt
Questo equivale alla ipotesi di invarianza per traslazioni temporali
Il problema dei due corpi
La prima legge di Keplero nella sua forma restrittiva “orbite complanari” è
collegata alla conservazione del momento angolare
La seconda legge di Keplero sulla costanza delle aree spazzate dal raggio
vettore richiede anche la conservazione dell’impulso
Per ricavare la forma delle orbite bisogna anche prendere in considerazione
la conservazione dell’energia che permette di scegliere tra orbite aperte
(paraboliche od iperboliche) ed orbite chiuse (ellittiche)
Specificando le legge dell’inverso del quadrato del raggio, cioè la legge di
gravitazione universale di Newton, si ricava nel caso specifico di orbite
ellittiche la terza legge di Keplero
Con Newton tre leggi cinematiche vengono unificate in una sola legge
quella di gravitazione universale a regolare il moto dei pianeti rispetto al
Sole
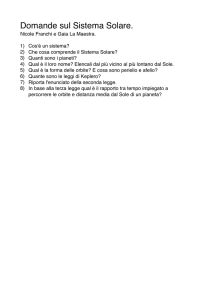
Soluzione analitica del problema dei due corpi I
Il segno
– sta ad
indicare
che la
forza è
diretta
(k>0)
verso il
centro
di forza
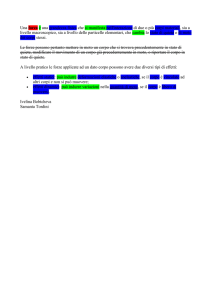
Soluzione analitica del problema dei due corpi II
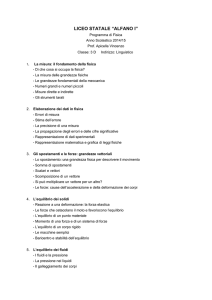
Soluzione analitica del problema dei due corpi III
Equilibrio
tra la forza
attrattiva e
quella
centrifuga
Il problema dei due corpi