Corso di Fondamenti di Automatica
Università di Roma “La Sapienza”
Diagrammi di Bode
L. Lanari
Dipartimento di Informatica e Sistemistica
Università di Roma “La Sapienza”
Roma, Italy
Ultima modifica – May 28, 2008
Argomenti
• Forma canonica di Bode
• Modulo e fase nel piano complesso
• I decibel (dB)
• Scala logaritmica per le ascisse
• Diagrammi di Bode dei vari fattori
• Sistema come filtro
Notazioni
• a = Mod[a] = modulo di a
• 6 a = Fase[a] = fase di a
• j=
√
−1
• s variabile complessa
Fondamenti di Automatica – Diagrammi di Bode
1
La Forma Canonica di Bode
Rappresentazione poli/zeri di una funzione di trasferimento
2 )
1 k (s − zk ) `(s2 + 2ζ`ωn`s + ωn`
0
F (s) = K m Q
Q
2
2
s
(s
−
p
)
i
i
z (s + 2ζz ωnz s + ωnz )
Q
Q
con m tale che∗
• m = 0 se nessun polo e zero in s = 0
• m < 0 se m zeri in s = 0
• m > 0 se m poli in s = 0
Inoltre
• espandendo il denominatore si ottiene un polinomio monico (coefficiente
del fattore di ordine più elevato in s pari a 1). Ciò è sempre possibile
ponendo un eventuale coefficiente diverso da 1 in K 0
• K 0 non è il guadagno del sistema
∗ Si
noti che non possono essere contemporaneamente presenti poli e zeri in s = 0 in
quanto si suppone che la F (s) abbia numeratore e denominatore coprimi, cioè senza radici
in comune. Per la stessa ipotesi non si possono avere cancellazioni poli/zeri in generale in
F (s).
Fondamenti di Automatica – Diagrammi di Bode
2
La Forma Canonica di Bode
• i termini (s − zk ) e (s − pi) derivano dalla presenza di
zeri reali (in s = zk )
poli reali (in s = pi)
2 ) e (s2 + 2ζ ω s + ω 2 )
• i termini (s2 + 2ζ`ωn`s + ωn`
z nz
nz
derivano dalla presenza di
zeri complessi e coniugati (in s = α` ± jβ`)
poli complessi e coniugati (in s = αz ± jβz )
con, in generale,
– pulsazione naturale ωn∗ =
q
2
α2
∗ + β∗
q
2
– coefficiente di smorzamento ζ∗ = −α∗/ωn∗ = −α∗/ α2
∗ + β∗
Fondamenti di Automatica – Diagrammi di Bode
3
La Forma Canonica di Bode
fattorizzando
s − zk = −zk (1 − 1/zk s) = −zk (1 + τk s) con τk = −1/zk
s − pi = −zk (1 − 1/pis) = −pi(1 + τis) con τi = −1/pi
con τi e τk costanti di tempo
2 )
2 /ω 2 )
(−z
)
(ω
(1
+
τ
s)
(1
+
2ζ
/ω
s
+
s
1
k
k
`
n`
k
`
k
`
n`
n`
F (s) = K 0 m Q
Q
Q
Q
2
2
2
s
i(−pi) z (ωnz ) i(1 + τis) z (1 + 2ζz /ωnz s + s /ωnz )
Q
Q
2
2
(1
+
τ
s)
1
k
k
` (1 + 2ζ` /ωn`s + s /ωn`)
= K m Q
Q
2
2
s
i(1 + τis) z (1 + 2ζz /ωnz s + s /ωnz )
Q
Q
Q
Q
con K guadagno generalizzato del sistema
2
k (−zk ) ` (ωn`)
0
K=K Q
Q
2
(−p
)
i
i
z (ωnz )
Q
Q
ottenibile come (per qualsiasi valore di m)
m
K = [s F (s)] Fondamenti di Automatica – Diagrammi di Bode
s=0
4
La Forma Canonica di Bode
Si noti che
• se il sistema ha zeri in s = 0 (e quindi è privo di poli in s = 0), K non
coincide con il guadagno statico del sistema definito come
F (s)
= F (0)
s=0
La presenza degli zeri in s = 0 implica F (0) = 0.
• se il sistema è privo di poli e zeri in s = 0, K coincide con il guadagno
statico (o in continua) F (0)
K = F (0)
• se il sistema è privo di poli e zeri in s = 0 ed è stabile asintoticamente, la
risposta indiciale tende asintoticamente al guadagno statico K = F (0)
• se il sistema ha zeri in s = 0 ed è stabile asintoticamente, la risposta
indiciale tende asintoticamente al guadagno statico
F (0) = 0 6= K
Fondamenti di Automatica – Diagrammi di Bode
5
La Forma Canonica di Bode della Risposta Armonica
2
2
1
k (1 + jωτk ) ` (1 + 2ζ` jω/ωn` + (jω) /ωn`)
F (jω) = K
Q
Q
m
2
2
(jω)
i(1 + jωτi) z (1 + 2ζz jω/ωnz + (jω) /ωnz )
Q
Q
con 4 fattori fondamentali della forma
1. Fattore costante K (guadagno generalizzato)
2. Fattore monomio jω (zero/polo in s = 0)
3. Fattore binomio 1 + jωτ (zero/polo reale non nullo)
2 (coppia zeri/poli complessi e
4. Fattore trinomio 1 + 2ζjω/ωn + (jω)2/ωn
coniugati)
Fondamenti di Automatica – Diagrammi di Bode
6
Modulo e Fase
Diagrammi di Bode: rappresentazione grafica del modulo (in dB) e della
fase di F (jω) al variare di ω ∈ IR+ = [0, +∞)
per ogni fissato ω̄, F (jω̄) ∈ C
I può essere rappresentato
• Parte reale e parte immaginaria
P
Im
F (jω̄) = Re[F (jω̄)] + jIm[F (jω̄)]
m
• Modulo e Fase
oM
l
du
o
fase '
F (jω̄) = Mod[F (jω̄)]ej Fase[F (jω̄)]
Re
Proprietà della fase:
1
Fase[F.G] = Fase[F ] + Fase[G], Fase
= −Fase[F ]
F
non vale per il modulo → si passa al logaritmo del modulo
Fondamenti di Automatica – Diagrammi di Bode
7
Decibel
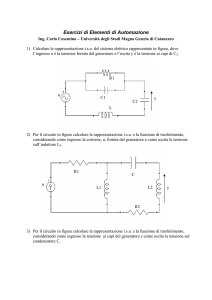
Il modulo è espresso in decibel (dB)
|F (jω)|dB = 20 log10 |F (jω)|
Dalle proprietà del logaritmo
|F.G|dB = |F |dB + |G|dB
1
= − |F |dB
F dB
|F |dB % +∞ se |F | % ∞
|F |dB & −∞ se |F | & 0
Esempi
40
30
|1|dB = 0 dB
20
|10|dB = 20 dB
|100|dB = 40 dB
√ ≈ 3 dB
2
dB
10
x dB
|0.1|dB = −20 dB
20Log10lxl
0
-10
-20
-30
-40
0
10
20
30
40
50
60
70
80
90
100
x
Fondamenti di Automatica – Diagrammi di Bode
8
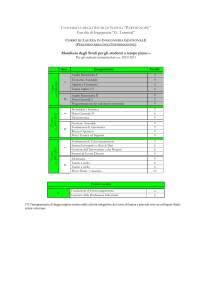
Scala logaritmica
Per le ascisse (pulsazioni) si usa una scala logaritmica in base 10 (distanza
di una decade corrisponde a una moltiplicazione per 10)
Vantaggi della scala logaritmica per le ascisse e dei decibel
• rappresentare grandezze (ω e modulo) che variano in campi estesi
• facilità nella costruzione del diagramma del modulo in dB di una risposta
armonica data in forma fattorizzata (forma canonica di Bode) a partire
dagli andamenti del modulo in dB dei singoli fattori
• facilità di rappresentare i diagrammi di sistemi in serie (somma dei singoli
diagrammi)
40
30
20
20Log10lxl
10
x dB
La funzione log10(x), in scala logaritmica per
le ascisse, diventa lineare!
0
- 10
- 20
- 30
- 40
-2
10
10
-1
0
10
1
10
2
10
x (scala logaritmica)
Fondamenti di Automatica – Diagrammi di Bode
9
Fattore Costante K
Im
Nel piano complesso
(es: K = 10 e K = −0.3162)
K<0
K>0
Re
25
20
K >1
Modulo
K
dB
15
10
5
0
-5
K <1
- 10
- 15
-2
10
-1
10
0
10
1
10
2
10
Pulsazione (rad/s)
0
Fase
Fase (deg)
K>0
- 50
- 100
- 150
K<0
- 180
-2
10
Fondamenti di Automatica – Diagrammi di Bode
-1
10
0
10
Pulsazione (rad/s)
1
10
2
10
10
Fattore Monomio jω
Im
|jω|dB = 20 log10 ω nel piano complesso
|jω|dB = 20x con le ascisse x in scala logaritmica
j!
90
o
Re
Modulo
Modulo (dB)
40
20
20 dB/dec
0
- 20
- 40
-2
10
-1
10
0
10
Pulsazione (rad/s)
1
10
2
10
Fase
Fase (deg)
100
90
80
60
40
20
0
-2
10
Fondamenti di Automatica – Diagrammi di Bode
-1
10
0
10
Pulsazione (rad/s)
1
10
2
10
11
Fattore Monomio a Denominatore 1/jω
Dalle proprietà del modulo in dB e della fase
Modulo
Modulo (dB)
40
-20 dB/dec
20
0
- 20
- 40
-2
10
-1
10
0
10
Pulsazione (rad/s)
1
10
2
10
0
Fase
Fase (deg)
- 20
- 40
- 60
- 80
- 90
- 100
-2
10
Fondamenti di Automatica – Diagrammi di Bode
-1
10
0
10
Pulsazione (rad/s)
1
10
2
10
12
Fattore Binomio a numeratore (1 + jωτ )
|1 + jωτ |dB = 20 log10
q
1 + ω 2τ 2
Approssimazione rispetto alla pulsazione di rottura 1/|τ |
q
1 + ω 2τ 2
≈
1
se ω 1/|τ |
√ 2 2
ω τ se ω 1/|τ |
e quindi
|1 + jωτ |dB
≈
se ω 1/|τ |
0 dB
20 log ω + 20 log |τ | se ω 1/|τ |
10
10
mentre alla pulsazione di rottura ω ∗ = 1/|τ |
|1 + jτ /|τ | |dB = 20 log10
√
2 ≈ 3 dB
Si approssima il modulo con due semi-rette.
Andamento del modulo indipendente dal segno di τ
L’andamento della fase dipende invece dal segno di τ
Fondamenti di Automatica – Diagrammi di Bode
13
Fattore Binomio a numeratore (1 + jωτ ), τ > 0
¿ >0
Im
j!¿
Nel piano complesso
Re
1
Modulo
Fase
Fondamenti di Automatica – Diagrammi di Bode
14
Fattore Binomio a denominatore 1/(1 + jωτ ), τ > 0
Dalle proprietà del modulo in dB e della fase
Modulo
Fase
Fondamenti di Automatica – Diagrammi di Bode
15
Fattore Binomio a numeratore/denominatore τ < 0
¿ <0
Im
1 Re
Modulo non cambia, fase si
j!¿
Numeratore
Fondamenti di Automatica – Diagrammi di Bode
Denominatore
16
Fattore Trinomio a numeratore
Modulo
2
2
ζ
(jω) ω
ω (jω) +
+ j2ζ 1 + 2
= 1 −
2
2
ωn
ωn
ωn
ωn v
!2
!
u
2
2
u
ω
ω
= t 1− 2
+ 4ζ 2 2
ωn
ωn
Approssimazione rispetto alla pulsazione naturale ωn
|TRINOMIO|
|TRINOMIO|dB
≈
≈
s
se ω ωn
1
ω2
2
ωn
2
2
ω
= ω2
n
0 dB
se ω ωn
se ω ωn
2 se ω ω
40 log10 ω − 20 log10 ωn
n
in ω = ωn si ha |TRINOMIO| = 2 |ζ|
⇒
se ζ = 0 si ha −∞ dB, se |ζ| = 0.5 si ha 0 dB, se |ζ| = 1 si ha 6 dB
Fondamenti di Automatica – Diagrammi di Bode
17
Fattore Trinomio |ζ| = 1
Si noti che, nel caso ζ = ±1, le radici del fattore trinomio sono reali coincidenti in
−ωn se ζ = 1
radici
=
ω
n se ζ = 1
ζ
s2
s 2
1±2 s+ 2 = 1±
ωn
ωn
ωn
e quindi gli andamenti del modulo e della fase per ζ = ±1 coincidono con
quelli del doppio fattore binomio con pulsazione di rottura
1
= ωn
|τ |
Pertanto in ω = ωn il modulo del fattore trinomio, nel caso |ζ| = 1, vale
2 × (3 dB) =
6 dB Trinomio a numeratore
2 × (−3 dB) = −6 dB Trinomio a denominatore
Fondamenti di Automatica – Diagrammi di Bode
18
Fattore Trinomio
√
Inoltre se |ζ| < 1/ 2 ≈ 0.707, il modulo di un fattore trinomio a denominatore
1
TRINOMIO ha un massimo chiamato picco di risonanza
|F (jω)| = |F (jωr )| =
1
q
2|ζ| 1 − ζ 2
in corrispondenza della pulsazione di risonanza ωr (coincidente con la pulsazione naturale solo per ζ = 0)
q
ωr = ωn 1 − 2ζ 2
Fondamenti di Automatica – Diagrammi di Bode
19
Fattore Trinomio a numeratore ζ ≥ 0
³3
Nel piano complesso
³2
Im
³ >0
³ 3 > ³ 2> ³ 1
³
1
³1
Re
-1
0
1
Modulo
(al variare di 0 ≤ ζ ≤ 1)
Fase
(al variare di 0 ≤ ζ ≤ 1)
Fondamenti di Automatica – Diagrammi di Bode
20
Fattore Trinomio a denominatore ζ ≥ 0
Dalle proprietà del modulo in dB e della fase
Modulo
(al variare di 0 ≤ ζ ≤ 1)
Fase
(al variare di 0 ≤ ζ ≤ 1)
Fondamenti di Automatica – Diagrammi di Bode
21
Fattore Trinomio a numeratore/denominatore ζ < 0
60
60
40
40
Modulo (dB)
Modulo (dB)
Modulo non cambia, fase cambia di segno
-1
20
-0.7
0
-0.5
-0.3
-0.1
-0.01
-20
-0.01
20
0
-1
-20
-40
-40
!n
0.1 !n
0.1 !n
10 !n
Pulsazione (rad/sec)
Pulsazione (rad/sec)
-0.1 -0.3
0
180
160
-0.01
-40
Fase (deg)
Fase (deg)
-20
-1
-60
-80
-100
-120
-140
140
-0.7
-0.5
120
100
80
60
40
-1
-160
-180
10 !n
!n
-0.01
20
0.1 !n
!n
10 !n
Pulsazione (rad/sec)
Trinomio a Numeratore
−1 ≤ ζ < 0
Fondamenti di Automatica – Diagrammi di Bode
0
0.1 !n
!n
Pulsazione (rad/sec)
10 !n
Trinomio a Denominatore
−1 ≤ ζ < 0
22
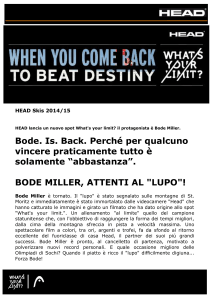
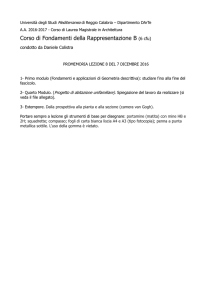
Sistema come filtro
Siano 4 sistemi con stesso guadagno e pulsazione di rottura diversa
1
,
F1(s) =
1 + 10s
1
F2(s) =
,
1+s
1
F3(s) =
,
1 + 0.1s
1
F4(s) =
1 + 0.01s
5
Modulo (dB)
0
−5
−10
−15
−20 −2
10
F1
F2
F3
F4
−1
10
0
1
10
10
Pulsazione (rad/s)
2
10
3
10
e l’ingresso combinazione lineare di segnali sinusoidali a diverse pulsazioni
u(t) = −0.6 sin(f1 t)−0.4 sin(f2 t)+0.5 sin(f3 t)+0.5 sin(f4 t)−0.3 sin(f5 t)−0.2 sin(f6 t)+0.2 sin(f7 t)−0.2 sin(f8 t)
f1 = 2π0.75, f2 = 2π1.25, f3 = 2π1.5, f4 = 2π3, f5 = 2π5, f6 = 2π6, f7 = 2π8, f8 = 2π11
Fondamenti di Automatica – Diagrammi di Bode
23
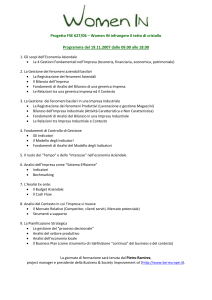
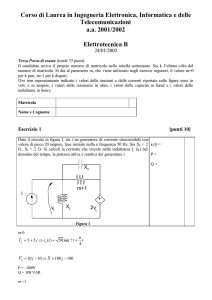
Sistema come filtro
Ingresso ha l’andamento nel tempo periodico con periodo T = 4 s mentre
la sua rappresentazione spettrale (nel dominio della frequenza) mette in
evidenza i contributi dei singoli segnali sinusoidali.
Spettro segnale ingresso
Ingresso
0.8
3
T
0.6
2
0.4
1
0.2
0
0
−0.2
−1
−0.4
−2
−3
0
−0.6
2
4
6
Fondamenti di Automatica – Diagrammi di Bode
8
−0.8 0
10
1
10
Pulsazione (rad/s)
2
10
24
Sistema come filtro – Sistema 1
Diagramma del modulo (non in dB) e risposta in uscita nel tempo
Sistema 1
Sistema 1
2.5
1
2
1.5
Modulo
0.8
1
0.5
0.6
0
−0.5
0.4
−1
−1.5
0.2
−2
0 −2
10
−1
10
0
1
10
10
Pulsazione (rad/s)
2
10
3
10
−2.5
0
Ingresso
Uscita
2
4
Tempo (s)
6
8
Sono evidenziati i valori del modulo alle diverse pulsazioni del segnale in
ingresso.
Fondamenti di Automatica – Diagrammi di Bode
25
Sistema come filtro – Sistema 2
Diagramma del modulo (non in dB) e risposta in uscita nel tempo
Sistema 2
Sistema 2
2.5
1
2
1.5
Modulo
0.8
1
0.5
0.6
0
−0.5
0.4
−1
−1.5
0.2
−2
0 −2
10
−1
10
0
1
10
10
Pulsazione (rad/s)
2
10
Fondamenti di Automatica – Diagrammi di Bode
3
10
−2.5
0
Ingresso
Uscita
2
4
Tempo (s)
6
8
26
Sistema come filtro – Sistema 3
Diagramma del modulo (non in dB) e risposta in uscita nel tempo
Sistema 3
Sistema 3
2.5
1
2
1.5
Modulo
0.8
1
0.5
0.6
0
−0.5
0.4
−1
−1.5
0.2
−2
0 −2
10
−1
10
0
1
10
10
Pulsazione (rad/s)
2
10
Fondamenti di Automatica – Diagrammi di Bode
3
10
−2.5
0
Ingresso
Uscita
2
4
Tempo (s)
6
8
27
Sistema come filtro – Sistema 4
Diagramma del modulo (non in dB) e risposta in uscita nel tempo
Sistema 4
Sistema 4
2.5
1
2
1.5
Modulo
0.8
1
0.5
0.6
0
−0.5
0.4
−1
−1.5
0.2
−2
0 −2
10
−1
10
0
1
10
10
Pulsazione (rad/s)
2
10
3
10
−2.5
0
Ingresso
Uscita
2
4
Tempo (s)
6
8
All’aumentare della pulsazione di rottura il sistema filtra sempre di meno
il segnale in ingresso e l’uscita, a regime permanente, diventa sempre più
simile all’ingresso.
Fondamenti di Automatica – Diagrammi di Bode
28
Sistema come filtro
Attenzione – La capacità di un sistema di riprodurre fedelmente un dato
segnale in uscita dipende anche dalla fase.
Ad esempio, si considerino due sistemi F1 e F2 con diagrammi del modulo
(non in dB) uguali ma fase notevolmente diversa
100
1
0
−100
Fase (deg)
Modulo
0.8
0.6
0.4
−200
−300
−400
−500
0.2
−600
0 −2
10
−1
10
0
1
10
10
Pulsazione (rad/s)
2
10
Fondamenti di Automatica – Diagrammi di Bode
3
10
−700 −2
10
F1
F2
−1
10
0
1
10
10
Pulsazione (rad/s)
2
10
3
10
29
Sistema come filtro
Le corrispondenti uscite relative allo stesso ingresso, causa lo sfasamento
introdotto dal sistema F2, differiscono notevolmente!
Sistema 1
Sistema 2
2.5
2.5
2
2
1.5
1.5
1
1
0.5
0.5
0
0
−0.5
−0.5
−1
−1
−1.5
−1.5
−2
−2.5
0
−2
Ingresso
Uscita
10
20
30
Tempo (s)
40
Fondamenti di Automatica – Diagrammi di Bode
50
−2.5
0
Ingresso
Uscita
10
20
30
Tempo (s)
40
50
30
Sistema come filtro
Siano 4 sistemi con stesso guadagno e pulsazione naturale diversa
F (s) =
1
2)
(1 + 2ζs/ωn + s2/ωn
con ζ = 0.2 e ωn = {1, 8, 10, 100}
10
Modulo (dB)
5
0
−5
−10
−15
−20 −2
10
F1
F2
F3
F4
−1
10
0
1
10
10
Pulsazione (rad/s)
2
10
3
10
e lo stesso ingresso dell’esempio precedente.
Fondamenti di Automatica – Diagrammi di Bode
31
Sistema come filtro – Sistema 1
Diagramma del modulo (non in dB) e risposta in uscita nel tempo
Sistema 1
Sistema 1
3
2.5
2
2.5
1.5
1
2
Modulo
0.5
0
1.5
−0.5
1
−1
−1.5
−2
−2.5
0
0.5
Ingresso
Uscita
2
4
Tempo (s)
6
8
0 −2
10
−1
10
0
1
10
10
Pulsazione (rad/s)
2
10
3
10
Sono evidenziati i valori del modulo alle diverse pulsazioni del segnale in
ingresso.
Fondamenti di Automatica – Diagrammi di Bode
32
Sistema come filtro – Sistema 2
Diagramma del modulo (non in dB) e risposta in uscita nel tempo
Sistema 2
Sistema 2
3
2.5
2
2.5
1.5
1
2
Modulo
0.5
0
1.5
−0.5
1
−1
−1.5
−2
−2.5
0
0.5
Ingresso
Uscita
2
4
Tempo (s)
6
Fondamenti di Automatica – Diagrammi di Bode
8
0 −2
10
−1
10
0
1
10
10
Pulsazione (rad/s)
2
10
3
10
33
Sistema come filtro – Sistema 3
Diagramma del modulo (non in dB) e risposta in uscita nel tempo
Sistema 3
Sistema 3
3
2.5
2
2.5
1.5
1
2
Modulo
0.5
0
1.5
−0.5
1
−1
−1.5
−2
−2.5
0
0.5
Ingresso
Uscita
2
4
Tempo (s)
6
Fondamenti di Automatica – Diagrammi di Bode
8
0 −2
10
−1
10
0
1
10
10
Pulsazione (rad/s)
2
10
3
10
34
Sistema come filtro – Sistema 4
Diagramma del modulo (non in dB) e risposta in uscita nel tempo
Sistema 4
Sistema 4
3
2.5
2
2.5
1.5
1
2
Modulo
0.5
0
1.5
−0.5
1
−1
−1.5
−2
−2.5
0
0.5
Ingresso
Uscita
2
4
Tempo (s)
6
8
0 −2
10
−1
10
0
1
10
10
Pulsazione (rad/s)
2
10
3
10
All’aumentare della pulsazione naturale e quindi della pulsazione di risonanza,
variano le capacità filtranti del sistema.
Fondamenti di Automatica – Diagrammi di Bode
35
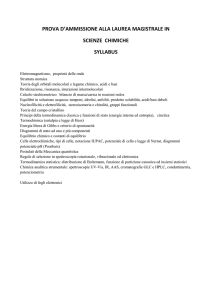
Sistema come filtro – Sistema 3
Confronto tra il segnale ricostruito dalla risposta armonica (a regime permanente) e il segnale in uscita. La differenza è il transitorio.
Sistema 3
3
y
yRP
2
1
0
−1
−2
−3
0
1
Fondamenti di Automatica – Diagrammi di Bode
2
Tempo (s)
3
4
36