1. SECONDO PRINCIPIO IN FORMA VETTORIALE
y
La forza e l’accelerazione sono dei vettori. Questo significa che se si
individuano due direzioni perpendicolari
i
piano, e si
x ed y n un
’
scompone l azione della forza in due componenti F ed F secondo la Fy
F
y
x
tecnica del parallelogramma, come in figura, lungo ciascuna delle due
x
direzioni si può applicare il secondo principio della dinamica in modo del
F
ll
ll’
l
x
tutto indipendente da que o che accade ne a tra direzione. Questa proprietà si
chiama principio d’indipendenza dei moti in direzioni perpendicolari e fu scoperta da Galileo. Invece di
scrivere due relazioni distinte si è soliti utilizzare una notazione sintetica, quella vettoriale, ma il significato
è il medesimo. Indicando quindi l’accelerazione con a(a ;a ) :
x y
F = ma
2. FORZE NORMALI DEI VINCOLI
VINCOLI
⇔
F = max
x
F = may
y
y
N
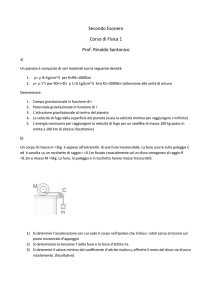
Quando un oggetto è sottoposto ad un vincolo che ne
impedisce il movimento lungo uno dei due versi di
una certa direzione, qualsiasi forza F si eserciti in quel
verso, essa viene annullata dall’azione del vincolo nel
verso opposto. La presenza di una forza con tali
caratteristiche si deduce semplicemente osservando
che, nella direzione lungo la quale il vincolo agisce,
l’oggetto è privo di accelerazione. Quindi, affinché il
secondo principio della dinamica sia soddisfatto, deve
mg
necessariamente provenire una forza dal vincolo che
contrasti F . A questa forza esercitata dal vincolo si
x
dà il nome di reazione normale e si indica con N .
Poniamo il caso di un oggetto di massa appoggiato
m
in equilibrio su di un tavolo . Dovendo risultare a = 0 , ed essendo presente la forza peso mg diretta in
y
basso necessario concludere che esista una forza verticale diretta in alto tale da rendere nulla la
N,
,è
,
somma delle forze lungo l’asse y :
Asse
y
: mg − N = may = 0 ⇒ mg = N
Val la pena di notare che questo ragionamento non ha nulla anche vedere con le applicazioni del terzo
principio della dinamica, e che mg ed N dell’esempio in figura non sono una coppia azione-e-reazione,
com’è evidente dal fatto che agiscono entrambe sullo stesso oggetto.
3. FUNI INESTENSIBILI
La fune inestensibile è un oggetto in grado di trasferire il punto di azione di una forza lasciando inalterata la
sua intensità. Per poter svolgere un tale compito è necessario poter considerare trascurabile la sua massa
(altrimenti dovremmo tenere conto della variazione che la forza subisce dovendo accelerare anche la fune in
1
ogni azione) . Si definisce tensione T lungo la
fune, un vettore che ha la direzione della fune,
e per intensità la forza misurata da un
dinamometro che venisse agganciato ai due
capi della fune stessa in un punto qualunque
dove la fune fosse tagliata. Per una fune in
estensibile di massa trascurabile, il
dinamometro misura lo stesso valore
dovunque si esegua il taglio.
T
A
B
4. PULEGGE
La puleggia è una macchina in grado di modificare la direzione della tensione di una
corda senza alterarne l’intensità. Con riferimento alla figura a destra, per poter tenere
in equilibrio la massa m la puleggia consente di esercitare la forza mg
indifferentemente lungo direzioni analoghe alle tre indicate. Per svolgere questa
funzione la puleggia deve avere una massa trascurabile in modo da considerare
irrilevante la variazione che la forza subisce dovendo accelerare (angolarmente) la
puleggia stessa in ogni azione.
mg
mg
m
mg
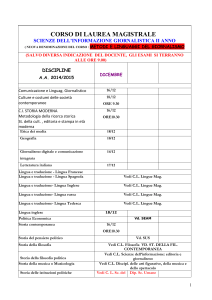
Esempio 1
Relativamente alla f ig ura si hanno i dati:
mA = 3.00 Kg
mB = 7.00 Kg
Si calcoli l ’accelerazione
a
con cui si muove il sistema delle due masse e
di quanto metri avanza la massa A in
Oggetto A asse x :
Oggetto A asse y :
Oggetto B asse y :
3.00 s .
N
A
T = mAaAx
N − mAg = maAy = 0
y
T
m Ag
⇒
T
N = mAg
B
T − mB g = maBy
Chiamiamo aAx = a . Per le proprietà sopra esposte della fune e
mB g
della corda, risulta che aBy = −a , dato che se la velocità di A viene
x
incrementata verso destra della quantità a ogni secondo,
contemporaneamente la velocità di B è incrementata della stessa quantità a però in basso, cioè
contrariamente al verso scelto come positivo nel riferimento. Possiamo impostare il sistema di due equazioni
nelle due incognite T ed a :
T = mAa
T − mB g = −mBa
⇒
mAa − mB g = −mBa
⇒
a=
mB
3.00
g=
9.81 = 2.94 m/s 2
mA + mB
3.00 + 7.00
2
da cui infine: T =
mAmB
3.00 × 7.00
g=
9.81 = 20.6 N . Per il calcolo dello spostamento x (3.00 s) − x 0
mA + mB
3.00 + 7.00
scriviamo la legge oraria della massa A:
1
x (t ) = x 0 + (2.94)t 2
2
1
x (2.00 s) − x 0 = + (2.94)(3.00)2 = 1.53 m .
2
⇒
Osserviamo che spesso questo esercizio viene risolto in modo errato concludendo che T applicato al corpo
A sia uguale in intensità al peso mB g del corpo B. La confusione nasce dal fatto che questa conclusione è
vera solo se le due masse sono ferme, ma non è lecito estenderla al caso in movimento, dove la forza che
giunge alla massa A è diminuita rispetto ad mB g di quanto serve per accelerare la massa B verso il basso.
Esempio 2
y
Calcolare l’accelerazione della macchina di Atwood inf igura, con
mB > mA , e calcolare
la tensione della corda.
Oggetto A asse y :
T − mAg = ma Ay
Oggetto B asse y :
T − mB g = maBy
T
A
Chiamiamo aAy = a . Risulta che aBy = −a , dato che se la velocità di A viene
incrementata vesso destra della quantità a ogni secondo, contemporaneamente
la velocità di B è incrementata della stessa quantità a però in basso.
T = mAa + mAg
T = −mBa + mB g
⇒
mAa + mAg = −mB a + mB g
⇒
a=
mAg
T
B
mB − mA
g
mA + mB
mB g
m − m
2mAmB
A
T = mA B
g + mAg =
g
mA + mB
mA + mB
3. IL PIANO INCLINATO
y
N
Il problema dello scivolamento di oggetto lungo
un piano inclinato è molto semplificato dalla
scelta di un sistema di riferimento con l’asse delle
ascisse parallelo al piano stesso. In questo modo
risulta che la quota y vale zero durante l’intero
tragitto, e d analogamente sono nulle vy ed ay .
mg sin α
90 − α
α
Asse x :
mg sin α = max
α
mg cos α
Asse y :
x
α
N − mg cos α = may = 0
mg
Risolvendo si trovano subito sia il valore della
forza normale sia l’accelerazione lungo il piano:
3
ax = g sin α
N = mg cos α
il tempo t* che occorre per arrivare alla base del piano partendo da fermo nella sommità si trova scrivendo
la legge oraria. Assumendo che il piano sia lungo L ed alto h , con h = L sin α , risulta:
1
1
x (t ) = x 0 + v0x t + ax t 2 = g sin αt 2
2
2
⇒
L=
1
g sin αt*2
2
⇒
t* =
2L
1
=
sin α
g sin α
2h
g
2h
di caduta libera da fermo partendo da un’altezza h
g
e come si vede è tanto più lungo del tempo t =
quanto più piccolo è sin α , quindi cresce al diminuire dell’angolo che il piano forma con l’orizzontale.
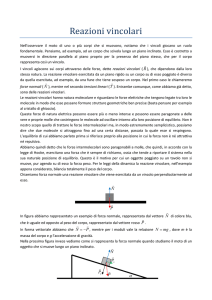
Esempio 3
y
Relativamente al piano inclinato in f igura si
hanno i seguenti dati:
mA = 14.0 Kg
T
mB = 10.0 Kg
Le due masse sono lasciate libere ad un certo
istante. Calcolare, nel caso di assenza di
qualunque attrito, l’accelerazione delle due
masse e la tensione della corda. Dire qual è la
direzione verso cui si muove il sistema.
A
y
Oggetto A asse x :
T − mAg sin α = mAaAx
Oggetto A asse y :
N − mAg cos α = mAaAy = 0
T
mg sin 35°
35°
mg cos 35°
B
α = 35°
mg
Sono opportuni due riferimenti distinti,
uno per il corpo A ed un altro per il corpo
B. Risulta:
Oggetto B asse y :
x
N
⇒
mB g
N = mAg cos α
T − mB g = mBaBy
Chiamiamo aAx = a . Per le proprietà sopra esposte della fune e della corda, risulta che aBy = −a , dato che
se la velocità di A viene incrementata verso destra della quantità a ogni secondo, contemporaneamente la
velocità di B è incrementata della stessa quantità a però in basso, cioè contrariamente al verso scelto come
positivo nel riferimento. Possiamo impostare il sistema di due equazioni nelle due incognite T ed a :
T − mAg sin α = mAa
T − mB g = −mBa
a=
⇒
mB g − mBa = mAa + mAg sin α
mB − mA sin α
10.0 − 14.0 sin 35°
g=
= 0.805 m/s
mA + mB
10.0 + 14.0
4
m − m sin α
m m (1 + sin α)
A
g = A B
T = mB g − mB a = mB g − mB B
g = 90.1 N
mA + mB
mA + mB
Come si vede il segno dell’accelerazione è determinato dalla quantità mB − mA sin α : quando è positiva il
sistema si muove verso destra, con la massa B che scende, quando è negativa verso sinistra con B che sale.
4. L’ATTRITO
A
B
5
A
B
y
27°
N
mg sin α
90 − α
α
α
mg cos α
x
α
mg
6