Microonde - Introduzione
• Microonde: onde elettromagnetiche aventi lunghezza d’onda nel vuoto
1 mm ≤ λ ≤ 1 m
e quindi frequenza (λ =c/f)
300 MHz ≤ f ≤ 300 GHz.
• I campi elettromagnetici nella banda di frequenza delle microonde hanno λ
comparabile con le dimensioni dei componenti o dei circuiti
il tempo di propagazione delle grandezze elettromagnetiche tra punti diversi
delle strutture che si vogliono considerare è paragonabile al periodo delle
oscillazioni in esame.
L’analisi circuitale tipica delle basse frequenze, basata sulle definizioni di
tensione e corrente, sulle leggi di Kirchoff e sull’ipotesi di costanti concentrate,
non è più sufficiente per un’adeguata descrizione dei fenomeni e.m..
• La teoria delle microonde può essere sviluppata a partire dalla teoria
dei campi elettromagnetici.
1
Microonde - Introduzione
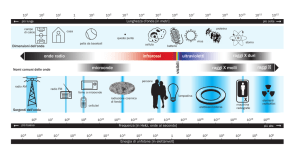
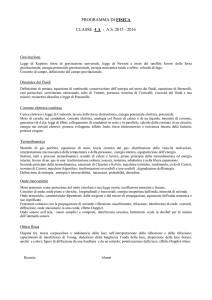
Spettro elettromagnetico
Frequenza (Hz)
104
103
102
10
3·1010 3·1011 3·1012 3·1013 3·1014
1
10-1
10-2
10-3
Lunghezza d’onda (m)
10-4
10-5
Visibile
Infrarosso
MICROONDE
Lontano infrarosso
3·109
Onde millimetriche
3·108
VHF (Very High Frequency)
3·107
HF (High Frequency)
Onde corte
3·106
MF (Medium Frequency)
Onde medie
LF (Low Frequency)
Onde lunghe
3·104 3·105
10-6
2
Microonde - Introduzione
Spettro elettromagnetico
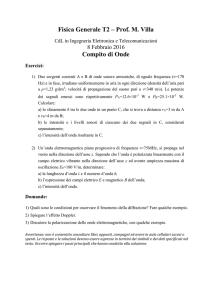
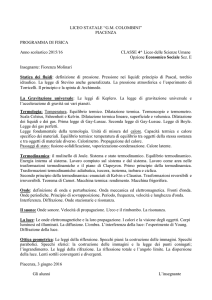
Denominazione bande alle frequenze delle microonde
L
S
C
X
Ku
K
Ka
U
1-2 GHz
2-4 GHz
4-8 GHz
8-12.4 GHz
12.4-18 GHz
18-26 GHz
26-40 GHz
40-60 GHz
3
Microonde - Introduzione
Applicazioni
• Radar:
Lo sviluppo della tecnica delle microonde, all’epoca della seconda guerra
mondiale, è stato legato alle applicazioni RADAR (Radio Detection And
Ranging: radio rivelazione e localizzazione). Ancora oggi i Radar sono tra le
principali applicazioni delle microonde.
Nei Radar l’uso delle microonde è legato alla possibilità di realizzare antenne di
dimensioni ridotte, in grado di irradiare nello spazio gran parte della loro
energia in un fascio ristretto (similmente ai laser in ottica). Ciò è in genere
ostacolato da fenomeni di diffrazione che però possono essere regolati e ridotti
scegliendo opportunamente il campo di frequenze, la forma e l’ampiezza
dell’antenna.
Es.: per un’antenna parabolica, α° ≈140° λ /d è l’angolo di apertura del cono di
emissione (d=diametro della parabola). A 10 GHz se d=90 cm l’antenna
produce un fascio di circa 5° di apertura; per ottenere effetti equivalenti
4
a 100 MHz sarebbe necessaria un’antenna avente d=90 m!
• Comunicazioni:
La necessità di avere a disposizione bande di frequenze sempre più ampie per le
esigenze delle telecomunicazioni (maggiore numero di canali disponibili per la
trasmissione e maggiore fedeltà nella riproduzione di informazioni) richiede
l’impiego di frequenze sempre più elevate.
Nelle telecomunicazioni spaziali, la propagazione avviene in aria attraverso
punti visibili tra loro ed il vantaggio delle microonde è quello di non subire
riflessioni da parte degli strati alti dell’atmosfera.
Inoltre le piccole dimensioni dei satelliti implicano che le antenne poste su di
essi devono avere anch’esse dimensioni contenute (utilizzabili efficacemente,
come visto, solo alle iperfrequenze).
Esempi di applicazioni recenti: broadcasting a microonde, atterraggio strumentale a microonde, comunicazioni mobili, GPS per l’individuazione e la
5
localizzazione di oggetti mobili sulla terra da parte di satelliti, ...
• Riscaldamento a microonde:
L’emissione di radiazione da un corpo è dovuta ad una transizione della
sorgente da uno stato con una certa energia ad un altro con energia inferiore.
Se un atomo passa da una condizione fisica cui è associata l’energia E1 ad
un’altra cui è associata l’energia E2 < E1, viene emessa una radiazione di
frequenza f tale che risulta:
E1 - E2=hf
( h ≈ 6.6·10-34 J ·s ≈ 4.125·10-15 eV ·s , costante di Planck).
L’assorbimento della radiazione avviene per transizione del ricevitore
dall’energia E’ all’energia E’’=E’+hf.
Si può dire che ad un campo e.m. di frequenza f sono associati fotoni di energia
hf.
6
L’energia dei fotoni alle frequenze tipiche delle microonde è dell’ordine di 10-6
- 10-3 eV, molto minore dell’energia di ionizzazione (=energia necessaria per
sottrarre ad un atomo l’elettrone meno fortemente legato) degli elementi
presenti in natura: le microonde sono quindi radiazioni non ionizzanti.
L’energia hf è invece comparabile, alle iperfrequenze, con l’energia media di
agitazione termica kT ( k ≈ 1.38·10-23 J ·K-1 ≈ 8.625·10-5 eV· K-1, costante di
Boltzmann): le microonde possono essere usate come fonte energetica per
riscaldare i materiali assorbenti (es.:forno a microonde, che lavora a f=2450
MHz).
7
• Astrofisica:
Ricevitori che analizzano le radiazioni e.m. solari e di varie stelle o le
radiazioni del plasma, lavorano alle frequenze delle microonde.
• Fisica nucleare:
Molti fenomeni di risonanza di particelle molecolari, atomiche e nucleari,
dovuti all’azione di forze periodiche derivanti dall’applicazione di un campo
e.m., vengono esaminati alle frequenze delle microonde.
• Optoelettronica:
Lo sviluppo di laser e fibre ottiche ha stimolato la ricerca sulle possibilità di
realizzare sistemi di comunicazione alle lunghezze d’onda intorno al visibile,
banda di frequenze al di fuori di quella classica delle microonde.
Con qualche modifica, gran parte dell’analisi tecnica delle microonde può
essere utilizzata per lo sviluppo di sistemi di telecomunicazione basati
8
sull’ottica.
• Radiometria:
Radiometri a microonde vengono usati per tracciare ad esempio mappe della
temperatura atmosferica e dell’umidità del suolo.
• Generatori ed amplificatori:
Negli acceleratori di particelle opportune strutture guidanti convogliano onde
e.m. aventi velocità minori della velocità della luce, che interagiscono in
maniera efficace con fasci di particelle accelerate alla stessa velocità, fornendo
loro energia. Procedimenti opposti possono avvenire utilizzando fasci
elettronici per l’amplificazione delle onde e.m.
Tutte le applicazioni a microonde richiedono l’uso di speciali dispositivi per la
generazione e l’amplificazione: ad esempio gli amplificatori e gli oscillatori a
microonde allo stato solido (maser o amplificatore quantico), gli amplificatori
ad onda progressiva (TWT=Traveling-Wave Tube) e gli oscillatori ad onda
regressiva (BWO).
9
• Applicazioni mediche:
• Radarterapia:
penetrazione ed assorbimento delle microonde da parte dei tessuti biologici,
con produzione di calore (è utile per la riabilitazione fisica).
• Termoterapia localizzata con radiofrequenze (ipertermia):
le cellule cancerogene sono più sensibili al calore di quelle normali
(l’azione del calore è potenziata dalla scarsa vascolarizzazione dei tumori
che disperdono pertanto l’eccesso termico più lentamente dei tessuti sani).
L’energia a microonde, applicata mediante speciali apparecchiature, può
raggiungere tessuti alle desiderate profondità corporee, risparmiando
dall’azione termica i tessuti interposti tra la superficie corporea e la massa
tumorale. A temperature intorno ai 42-43°C le cellule cancerogene vengono
distrutte ed i prodotti della loro distruzione stimolano le difese immunitarie
dell’organismo.
10
Microonde - Introduzione
Strutture guidanti
• Una delle principali caratteristiche delle onde elettromagnetiche alla
frequenze delle microonde consiste nella possibilità di potersi propagare in
apposite strutture guidanti senza apprezzabili perdite.
• Strutture guidanti di tipo diverso si sono affermate nel tempo, in relazione alle
tecniche costruttive disponibili, richiedendo una specifica tecnologia di
costruzione dei vari componenti che intervengono nella emissione, trasmissione
e ricezione dell’energia e.m.
• Le strutture guidanti più usate sono quelle cilindriche, in cui l’energia e.m.
viene guidata secondo una direzione ben determinata, detta direzione assiale
della struttura. Le sezioni normali alla direzione assiale sono tutte uguali tra
loro.
11
• Cavo coassiale:
E’ costituito da due conduttori cilindrici
coassiali.
E’ stata la prima struttura guidante ad
essere usata nella tecnica delle
microonde.
Sezione cavo coassiale
Può essere di tipo rigido, in aria, con bassa attenuazione: il conduttore centrale
è sostenuto da appositi supporti distanziati, che lo separano dal tubo conduttore
esterno. Oppure può essere di tipo flessibile, con conduttore centrale immerso
in un dielettrico, sul quale è disposta una sottile treccia di fili metallici (o due
trecce, per limitare le irradiazioni verso l’esterno dovute alle fessure tra i fili)
che ha la funzione di conduttore esterno.
12
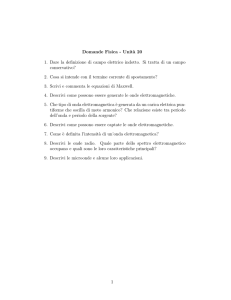
• Guida d’onda:
E’ costituita da un tubo metallico cavo.
a)
c)
b)
d)
e)
Sezioni di guide d’onda:
a) rettangolare; b) circolare; c) ellittica; d) corrugata; e) doppiamente corrugata.
13
• Linea a striscia:
E’ costituita da una striscia centrale conduttrice e da due conduttori piatti
paralleli posti allo stesso potenziale, nel caso di struttura bilanciata. E’
invece costituita da due conduttori separati nel caso di struttura sbilanciata.
E’ adatta all’integrazione con dispositivi a tecnologia planare.
a)
b)
Sezioni di linee a striscia (“stripline”):
a) bilanciata; b) sbilanciata.
14
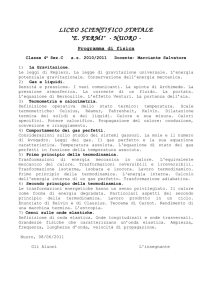
• Linea a microstriscia:
E’ costituita da un sottile strato dielettrico (substrato) completamente
metallizzato da un lato e con una striscia conduttrice sull’altro lato.
E’ una struttura tipica dei circuiti stampati. Per le dimensioni estremamente
ridotte e per la particolare leggerezza, viene utilizzata come linea di
interconnessione in un un vasto campo di applicazioni dei circuiti integrati a
microonde.
ε0
striscia conduttrice
dielettrico
ε0 εr
piano conduttore di massa
(ground-plane)
Sezione di una guida a microstriscia (“microstrip”).
15
• Linea a microstriscia invertita:
La parte di substrato opposta alla striscia conduttrice non è metallizzata ed il
ground-plane è posto in aria.
La lunghezza d’onda del segnale guidato ad una determinata frequenza è
dunque maggiore di quella del segnale guidato da una convenzionale
microstriscia alla stessa frequenza
la microstriscia invertita può operare
in maniera soddisfacente a frequenze più alte.
striscia conduttrice
dielettrico
ε0 εr
ε0
ground-plane
Sezione di una guida a microstriscia invertita.
16
• Linea a microstriscia invertita “trapped”:
E’ simile alla microstriscia invertita, ma il ground-plane costituisce una sorta
di canale sagomato intorno alla striscia conduttrice.
Si ottiene, rispetto alla microstriscia invertita, una soppressione di alcuni
modi di ordine superiore.
striscia conduttrice
dielettrico
ε0 εr
ε0
ground-plane
Sezione di una guida a microstriscia invertita “trapped”.
17
• Guida coplanare:
Il piano conduttore di massa è coplanare con la striscia conduttrice centrale,
mentre la parte inferiore dello strato dielettrico non è metallizzata.
Si presta molto bene alla realizzazione di circuiti integrati a microonde
potendosi integrare ottimamente con componenti attivi (è l’unica struttura
guidante veramente planare: tutti i conduttori giacciono sullo stesso piano).
conduttore di massa
striscia conduttrice
dielettrico
ε0 εr
Sezione di una guida coplanare.
18
• Microstriscia sospesa:
E’ come una microstriscia invertita ma il ground-plane è realizzato in modo
da chiudere interamente la struttura, mantenendo uno strato d’aria sia nella
parte superiore che in quella inferiore.
Le perdite sono basse ma possono facilmente essere eccitati modi d’ordine
superiore (che vanno soppressi)
la progettazione di questa struttura è
complicata.
conduttore
ε0
striscia conduttrice
dielettrico
ε0 εr
ε0
Sezione di una guida a microstriscia sospesa.
19
• “Slot line”:
E’ costituita da uno strato dielettrico metallizzato da un solo lato, con una
fessura (slot) nella metallizazione.
Ci sono notevoli difficoltà nel realizzare strutture di questo tipo che mostrino
impedenza caratteristica minore di 60 Ω.
strisce conduttrici
ε0
dielettrico
ε0 εr
Sezione di una “slot line”.
20
• “Finline”:
All’interno di un conduttore a sezione rettangolare viene posto un substrato
dielettrico, metallizzato da un solo lato; nella metallizzazione del substrato
viene praticata una fessura.
Le perdite sono basse. Si può usare a frequenze molto elevate.
conduttore
dielettrico
ε0
ε0 εr
ε0
Sezione di una “finline”.
21
• “Image line”:
E’ costituita da una striscia dielettrica continua posta su un piano conduttore.
E’ equivalente ad una guida dielettrica di altezza (compresa l’immagine)
doppia.
dielettrico
ε0 εr
ε0
piano
conduttore
Sezione di una “image line”.
22
• Strutture guidanti a più conduttori:
Linea bifilare schermata:
Microstrisce parallele:
strisce conduttrici
ε0
dielettrico
ε0 εr
23
I circuiti planari possono essere realizzati mediante tecniche fotolitografiche
che consentono di riportare su opportuni substrati dielettrici la parte
trasmissiva del circuito a microonde.
I componenti attivi possono essere inseriti in una fase successiva,
ottenendosi un circuito integrato di tipo ibrido (M.I.C.=Microwave
Integrated Circuit).
Oppure possono essere realizzati direttamente sopra o all’interno di un
substrato dielettrico semiconduttore, ottenendosi un circuito integrato
monolitico (M.M.I.C.:Monolithic Microwave Integrated Circuit).
La scelta del più opportuno materiale dielettrico da usare per il substrato è
legata alle proprietà elettriche, metalliche e termiche del materiale ed al suo
costo. Tra i più usati vi sono i substrati plastici, l’allumina ed il quarzo.
24
Microonde - Introduzione
Considerazioni generali sulla proprietà delle strutture guidanti
• Le strutture guidanti a due conduttori con dielettrico omogeneo (cavo
coassiale, stripline) permettono la propagazione di onde trasverse
elettromagnetiche (TEM) che non hanno componenti di campo elettrico e
magnetico nella direzione di propagazione.
• Le strutture ad un conduttore (guide d’onda) non consentono la
propagazione di onde TEM, ma solo di onde TE o TM. E’ cioè necessaria per
la propagazione una componente longitudinale di campo (E o H).
• Le strutture guidanti a più di due conduttori consentono la propagazione di
più onde TEM diverse tra loro.
• Le strutture in cui il campo interessa due o più dielettrici (microstrip)
consentono a rigore solo la presenza di modi ibridi, con entrambe le
componenti diverse da zero.
25
• La struttura metallicamente chiusa del cavo coassiale e delle guide d’onda
consente trasmissioni con basse perdite di energia.
• La struttura metallicamente aperta (in senso trasversale) delle linee a striscia
e a microstriscia comporta maggiori attenuazioni del campo elettromagnetico.
• Come già accennato, poiché le strutture guidanti e gli altri componenti a
queste collegati hanno dimensioni paragonabili alla lunghezza d’onda
utilizzata, la propagazione delle microonde va esaminata attraverso
l’applicazione della teoria dei campi elettromagnetici.
26
Microonde - Campi e.m. nelle strutture guidanti
Equazioni di Maxwell nella forma trasversa
• Considerando una regione esterna alle sorgenti del campo e.m. (correnti
elettriche e magnetiche impresse nulle) le equazioni di Maxwell in regime
armonico, in mezzi omogenei ed isotropi, assumono la forma:
∇ × E = − jωµ H
∇ × H = jωε C E
jωε C = g + jωε
• Principio di dualità:
E →H
H → −E
µ → εC
εC → µ
• Nella tecnica delle microonde ci si riferisce spesso a strutture guidanti in cui
interessa la propagazione dell’energia e.m. secondo una determinata direzione
costante che faremo coincidere con l’asse z.
• Per i piani normali a z assumeremo un sistema di coordinate curvilinee
ortogonali, in generale ( q1, q2 ), scelto nella maniera più comoda per
27
rappresentare la struttura.
Microonde - Campi e.m. nelle strutture guidanti
Equazioni di Maxwell nella forma trasversa
• Ad esempio, volendo considerare la propagazione delle onde e.m. all’interno
di una guida d’onda a sezione circolare useremo le coordinate polari (ρ, θ), per
una guida a sezione rettangolare useremo invece le coordinate cartesiane ( x, y )
e così via.
In genere useremo un sistema di coordinate cilindriche generalizzate
(q1, q2 , z )
• In un tale sistema di riferimento, le espressioni delle equazioni di Maxwell
assumono una particolare forma semplificata. Infatti il campo elettrico ed il
campo magnetico possono essere scomposti in una componente trasversale ed
in una longitudinale rispetto alla direzione di propagazione delle onde:
E = E t + z 0Ez
H = H t + z 0H z
28
Microonde - Campi e.m. nelle strutture guidanti
Equazioni di Maxwell nella forma trasversa
• Analogamente per l’operatore ∇ si ha: ∇ = ∇t + z 0
e per il laplaciano:
•
2
∂
∇ 2 = ∇t + 2
∂z
∂
∂z
2
∂
∇ × E = − jωµ H ⇒ ∇t + z 0
× ( E t + z 0E z ) = − jωµ ( H t + z 0H z )
∂z
∂E t
⇒ ∇t × E t + ∇t × z 0Ez + z 0 ×
= − jωµ H t − jωµ z 0H z
∂z
• Ricordando la proprietà: ∇ × Φ A = Φ∇ × A − A × ∇Φ
avremo che: ∇t × z 0Ez = Ez ∇t × z 0 − z 0 × ∇t Ez = − z 0 × ∇t Ez
e sostituendo nell’espressione già ricavata si ottiene:
∂E t
∇t × E t − z 0 × ∇t Ez + z 0 ×
= − jωµ H t − jωµ z 0H z
∂z
29
Microonde - Campi e.m. nelle strutture guidanti
Equazioni di Maxwell nella forma trasversa
• Scomponiamo in termini paralleli e normali all’asse z:
∂E t
∇t × E t − z 0 × ∇t Ez + z 0 ×
= − jωµ H t − jωµ z 0H z
∂z
⊥
⊥
⊥
//
rispetto all’asse z
//
∇t × E t = − jωµ z 0H z
∂E t
−
z
×
∇
E
+
z
×
= − jωµ H t
0
t z
0
∂z
• Per il principio di dualità si ha inoltre:
∇t × H t = jωε C z 0E z
∂H t
− z 0 × ∇t H z + z 0 × ∂z = jωε C E t
30
Microonde - Campi e.m. nelle strutture guidanti
Equazioni di Maxwell nella forma trasversa
• Le equazioni di Maxwell scritte nella forma ottenuta introducendo un sistema
di riferimento di coordinate cilindriche generalizzate, possono essere
semplificate se si considera una particolare classe di campi e.m., caratterizzati
dalla seguente proprietà:
le componenti trasverse del campo Et e Ht, in genere funzioni delle tre
coordinate q1, q2 , z, vengono scomposte ognuna nel prodotto di due
termini: uno funzione vettoriale delle coordinate trasverse q1, q2, l’altro
funzione scalare della sola coordinata longitudinale z:
E t ( q1, q2 , z ) = et ( q1, q2 ) Ze ( z )
H t ( q1, q2 , z ) = h t ( q1, q2 ) Zh ( z )
Non tutti i campi e.m. possono essere posti in questa forma (es.: le onde e.m.
sferiche), tuttavia la classe di campi che soddisfa questa ipotesi semplificatrice
è la più opportuna per descrivere in maniera semplice la propagazione di un
onda e.m. in una struttura guidante, permettendo di ricondurre lo studio delle
31
microonde a quello delle linee di trasmissione.
Microonde - Campi e.m. nelle strutture guidanti
Equazioni di Maxwell nella forma trasversa
• Se Ez = 0
si ha un campo trasverso elettrico (TE)
• Se H z = 0
si ha un campo trasverso magnetico (TM)
• Se
Ez = H z = 0
si ha un campo trasverso elettromagnetico (TEM)
• L’esistenza di campi TE, TM, TEM (che sono poi i tipi di campi utilizzati
nella pratica) è strettamente condizionata dalla particolare struttura guidante
che si usa.
Analizzeremo la forma che assumono le equazioni di Maxwell nel
caso di onde TE, TM, TEM.
Esamineremo quali onde trasverse possono presentarsi nei vari
supporti guidanti.
32
Microonde - Campi e.m. nelle strutture guidanti
Onde TE
• Nel caso di onde TE le equazioni di Maxwell in un sistema di riferimento di
coordinate cilindriche generalizzate assumono la forma:
∇t × E t = − jωµ z 0H z
z 0 × ∂E t = − jωµ H t
∂z
∇t × H t = 0
∂H t
z
H
z
−
×
∇
+
×
= jωε C E t
0
0
t z
∂z
(1)
(2)
(3)
(4)
• Introducendo l’ipotesi di separabilità delle variabili, la (1) diventa:
∇t × et (q1, q2 )Ze ( z ) = − jωµ z 0H z (q1, q2 , z )
(5)
da cui si deduce che la dipendenza di H z (q1, q2 , z ) da z è data unicamente dal
termine Ze ( z ) e dunque anche H z può scomporsi come segue:
H z ( q1, q2 , z ) = hz ( q1, q2 ) Ze ( z )
(6)
33
• Con l’uso della (6), la (5) diventa: ∇t × e t =− j ωµ z 0 hz
• Introducendo nella (2) l’ipotesi di separabilità delle variabili si ottiene:
z0 ×
∂e t (q1, q2 )Ze ( z )
dZe ( z )
= − jωµ h t (q1, q2 )Zh ( z ) ⇒
z 0 × et = − jωµ h t Zh ( z )
dz
∂z
• Analogamente, introducendo nella (3) l’ipotesi di separabilità delle variabili si
ottiene:
∇ t × h t ( q 1, q 2 ) Z h ( z ) = 0 ⇒ ∇ t × h t = 0
• Infine, introducendo nella (4) l’ipotesi di separabilità delle variabili si ottiene:
∂ h t (q1, q2 )Zh ( z )
− z 0 × ∇ t hz (q1, q2 )Ze ( z ) + z 0 ×
= j ωε C e t (q1, q2 )Ze ( z )
∂z
dZ
⇒− Ze z 0 × ∇ t hz + h z 0 × h t = j ωε C et Ze
dz
34
• Riassumendo, le
espressioni trovate sono:
∇ t × e t = − j ωµ z 0 hz
dZ e z 0 × e t = − j ωµ h t Z h
dz
∇ t × h t = 0
dZ h
−
Z
z
×
∇
h
+
z 0 × h t = j ωε C e t Z e
e 0
t z
dz
• Nella seconda equazione si nota che i vettori z 0 × e t e h t hanno la stessa
direzione (perpendicolare all’asse z): poiché i due membri dell’equazione
devono avere la stessa dipendenza da z, sarà soddisfatta una relazione di
proporzionalità del tipo:
dZ e
=− k z Z h
dz
• Nella quarta equazione i vettori z 0 × ∇ t hz , z 0 × h t e e t hanno la stessa
direzione (perpendicolare all’asse z), quindi possiamo scrivere:
dZ h
=− k z Z e
35
dz
• La legge di variazione del campo e.m. lungo la direzione di propagazione è
espressa pertanto dalle equazioni differenziali scalari lineari del primo ordine:
dZ e
dz =− k z Z h
dZ h =− k Z
z e
dz
equazioni formalmente identiche alle note equazioni delle linee di trasmissione,
nella particolare circostanza in cui le due costanti sono uguali
• La scelta della stessa costante di proporzionalità k z implica una precisa
restrizione del valore di Z e o Z h , permettendoci di dedurre univocamente una
delle due funzioni nota l’altra:
d 2 Ze
d 2 Ze
dZ h
2
differenziando la prima eq. otteniamo
=−
k
⇒
=
k
z
z Ze
2
2
dz
dz
dz
tipica equazione delle onde la cui soluzione ha forma: Z e ( z ) = P1 e k z z + P2 e − k z z
⇒ Z h ( z ) =−
(
)
1 dZ e
1
=−
k z P1 e k z z − k z P2 e − k z z = − P1 e k z z + P2 e − k z z
k z dz
kz
36
• Le equazioni delle onde (Helmholtz) sono:
2
∂2E t
2
∇
E
+
=
k
Et
t t
2
∂z
2
∂
2
∇ E + E z = k 2 E (nulla per i campi TE)
z
t z
∂z2
2
∂2H t
2
∇
H
+
=
k
Ht
t t
2
∂z
2
∇ 2 H + ∂ H z = k 2 H
z
t z
∂z2
k 2 = −ω 2 µεC
• Introducendo l’ipotesi di separabilità delle variabili la quarta equazione
2
diventa:
d
Ze
2
Z e ∇ t2 hz +
h
=
k
Z e hz
z
2
dz
⇒ Z e ∇ t2 hz + k z2 Z e hz = k 2 Z e hz ⇒ ∇ t2 hz = ( k 2 − k z2 )hz
• Ponendo k 2 − k z2 =− ω 2 µε C − k z2 = k t2 si ha: ∇ t2 hz = k t2 hz
Il problema e.m. relativo alle componenti trasversali di un campo TE consiste
fondamentalmente nella risoluzione di questa eq. diff. scalare del II ordine, con
le opportune condizioni al contorno, determinate dalla particolare struttura guidante. Nota hz si possono ricavare le altre componenti trasversali del campo
37 TE.
∇ t × e t = − j ωµ z 0 hz
dZ e z 0 × e t = − j ωµ h t Z h
dz
∇ t × h t = 0
dZ h
−
Z
z
×
∇
h
+
z 0 × h t = j ωε C e t Z e
e 0
t z
dz
∇ t × e t =− j ωµ z 0 hz
k z z 0 × e t = j ωµ h t
∇ t × h t = 0
− z × ∇ h − k z × h =
t
t z
z 0
0
= j ωε C e t
• Per individuare e t , moltiplicando vettorialmente per z 0 entrambi i membri
della seconda equazione si ha: k z z 0 × ( z 0 × e t ) = j ωµ z 0 × h t
k
⇒ k z z 0 ( z 0 ⋅ e t ) − e t ( z 0 ⋅ z 0 ) =− k z e t = j ωµ z 0 × h t ⇒ z 0 × h t =− z e t
j ωµ
sostituendo questa espressione di z 0 × h t nella quarta equazione:
2
2
kz
kz
− z 0 × ∇ t hz +
e t = j ωε C e t ⇒ − z 0 × ∇ t hz = j ωε C −
j ωµ
j ωµ
k 2 − kz2
j ωµ
⇒− z 0 × ∇ t hz =
e
⇒
e
=−
z 0 × ∇ t hz
t
t
2
kt
jωµ
e t
38
• Ricavata la e t , considerando la relazione già trovata::
z0 × ht = −
kz
j ωµ
et
e moltiplicandola vettorialmente per z 0 si trova:
ht =
kz
j ωµ
z0 × et
• Oppure è possibile giungere ad una formulazione in cui entrambe le
componenti trasversali dei campi elettrico e magnetico sono espresse
esplicitamente in funzione di ∇ t hz :
moltiplichiamo vettorialmente per z 0 l’eq. − z 0 × ∇ t hz − k z z 0 × h t = j ωε C e t :
z 0 × ( − z 0 × ∇ t hz ) − k z z 0 × ( z 0 × h t ) = j ωε C z 0 × e t
⇒ ∇ t hz + k z h t = j ωε C z 0 × e t ⇒ ∇ t hz + k z h t = j ωε C
ω 2 µε C
⇒ ∇ t hz = − k z −
kz
j ωµ
ht
kz
2
−k z + k 2
kz
ht ⇒ ht = 2 ∇
h t ⇒ ∇ t hz =
39t h z
kz
kt
Ricapitolando, per risolvere il problema e.m. per le onde TE un possibile
procedimento è il seguente:
1. Si risolve con le opportune condizioni al contorno l’equazione
∇ t2 hz = k t2 hz
2. Calcolata hz(q1, q2 ) si ricava il valore di et(q1, q2 ):
j ωµ
e t = − 2 z 0 × ∇ t hz
kt
3. Si calcola ht(q1, q2 ):
k
k
oppure
ht = z z0 × et
h t = z2 ∇ t hz
j ωµ
kt
4. Si calcolano Ze(z) e Zh(z):
Z h ( z ) = − P1e k z z + P2 e − k z z
Z e ( z ) = P1 e k z z + P2 e − k z z
5. Noti hz, et, ht, Ze, Zh, per avere l’espressione generale del campo TE:
E = E t + z 0Ez
H = H t + z 0H z
con
Ez = 0
E t = e t Ze
;
H z = hz Ze
H t = h t Zh
.
40
Microonde - Campi e.m. nelle strutture guidanti
Onde TM
• Nel caso di onde TM le equazioni di Maxwell in un sistema di riferimento di
coordinate cilindriche generalizzate assumono la forma:
∇t × E t = 0
− z 0 × ∇t E z + z 0 × ∂E t = − jωµ H t
∂z
∇t × H t = jωε C E z z 0
∂H t
×
= jωε C E t
z
0
∂z
(1)
(2)
(3)
(4)
• Introducendo l’ipotesi di separabilità delle variabili, la (3) diventa:
Zh ( z )∇t × ht (q1, q2 ) = jωε C Ez (q1, q2 , z )z 0
da cui si deduce che la dipendenza di E z (q1, q2 , z ) da z è data unicamente dal
termine Zh ( z ) e dunque anche Ez può scomporsi come segue:
Ez ( q1, q2 , z ) = ez ( q1, q2 ) Zh ( z )
(5)
41
∇ t × e t = 0
− Z h z 0 × ∇ t e z + dZ e z 0 × e t = − j ωµ Z h h t
dz
∇ t × h t = j ωε C e z z 0
dZ h
z 0 × h t = j ωε C Z e e t
dz
• Esaminando la quarta e la seconda equazione, si possono trovare delle
relazioni di proporzionalità tra le componenti Ze e Zh (uguali a quelle trovate
per le onde TE):
dZ e
dZ h
= −k zZh
= −k zZe
dz
dz
∇ t × e t = 0
z 0 × ∇ t e z + k z z 0 × e t = j ωµ h t
∇ t × h t = j ωε C e z z 0
− k z z 0 × h t = j ωε C e t
42
∂ 2E z
2
• L’equazione di Helmholtz per Ez è: ∇ E z +
=
k
Ez
2
∂z
2
t
d 2Zh
2
⇒ Z h ∇ ez + ez
=
k
Z h ez
2
dz
⇒ Z h ∇ t2 e z + k z2 Z h e z = k 2 Z h e z ⇒ ∇ t2 e z = k t2 e z
2
t
• Risolvendo l’eq. diff. scalare del II ordine ∇ t2 e z = k t2 e z , con le opportune
condizioni al contorno determinate dalla particolare struttura guidante, si trova
ez , da cui si possono poi ricavare le altre componenti trasverse del campo TM.
• Per individuare e t , si moltiplica vettorialmente per z 0 l’equazione
z 0 × ∇ t e z + k z z 0 × e t = j ωµ h t e si ottiene:
−∇ t e z − k z e t = j ωµ z 0 × h t
Sostituendo in quest’ultima l’equazione − k z z 0 × h t = j ωε C e t si trova:
j ωε C
k2
−∇ t e z − k z e t = − j ωµ
e t ⇒ ∇ t ez = − k z +
et
kz
kz
2
k
k
⇒ ∇ t e z = t e t ⇒ e t = z2 ∇ t e z
kz
kt
43
• Per trovare h t , si moltiplica vettorialmente per z 0 l’eq. − k z z 0 × h t = j ωε C e t
jω ε C
ottenendo: k z h t = j ω ε C z 0 × e t ⇒ h t =
z0 × et
kz
• Oppure è possibile esprimere anche ht in funzione di ∇ t e z :
j ωε C
ht =
z 0 × ∇ t ez
2
kt
• Il procedimento per studiare il comportamento di un’onda TM è dunque
analogo a quello che si segue per studiare un’onda TE.
• Le espressioni delle componenti del campo TM si possono anche ricavare da
quelle del campo TE applicando semplicemente il principio di dualità.
44
Microonde - Campi e.m. nelle strutture guidanti
Onde TEM
• Nel caso di onde TEM il campo non ha componenti nella direzione di
propagazione e le equazioni di Maxwell in un sistema di riferimento di
coordinate cilindriche generalizzate assumono la forma:
(1)
∇t × E t = 0
∇t × H t = 0
(2)
∂E t
z0 ×
= − jωµ H t
(3)
∂z
∂H t
(4)
= jωε C E t
z0 ×
∂z
• Utilizzando le condizioni di separabilità delle componenti del campo trasverso
si ottiene:
dZ e
z 0 × e t = − j ωµ Z h h t
∇
×
e
=
0
t
dz
t
∇
×
h
=
0
t
t
45
dZ h z × h = j ωε Z e
0
t
C e t
dz
• Si deducono le stesse relazioni di proporzionalità tra le componenti Ze e Zh
che si erano trovate nel caso TE e nel caso TM:
dZ e
= −k zZh
dz
∇ t × e t = 0
∇ t × h t = 0
dZ h
= −k zZe
dz
k z z 0 × e t = j ωµ h t
k z z 0 × h t = − j ωε C e t
• Moltiplicando vettorialmente per z 0 la terza equazione si ottiene:
jω
ωµ
µ
− k z e t = − j ωµ h t × z 0 ⇒ e t =
ht × z0
kz
• Ma dalla quarta equazione si ottiene direttamente:
kz
et =
ht × z0
j ωε C
• Dovendo essere le due espressioni trovate per et necessariamente identiche, si
ha:
kz
j ωµ
2
2
=
⇒ k z = −ω 2 µε C = k 2 ⇒ k t = 0
46
j ωε C
kz
• Venendo a coincidere tra loro la terza e la quarta equazione, il sistema ricavato
dalle equazioni di Maxwell non è più sufficiente per conoscere le componenti
trasversali del campo. E’ opportuno allora riferirsi ad altre proprietà del campo
e.m., derivanti dalle equazioni di Maxwell.
• Per il vettore induzione elettrica D = ε E , considerando una regione di
spazio in cui si ha ρ = 0, risulta:
∇ ⋅D = 0
∂
⇒ ∇t +
z 0 ⋅ (E t + E z z 0 ) = 0
∂z
E z = 0
• Poiché per un’onda TEM
otteniamo:
E t = Z e e t ⊥ z 0
∇t ⋅ et = 0
• Nel nostro caso e t , oltre ad essere solenoidale, è anche irrotazionale
( ∇ t × e t = 0 ) e può quindi essere ricavato dal gradiente di una funzione
scalare (potenziale):
e t = −∇ t Φ ( q1, q 2 )
Equazione di
2
Laplace 47
⇒ ∇ ⋅ e = ∇ ⋅ −∇ Φ = 0 ⇒ ∇ Φ = 0
t
t
t
(
t
)
t
• Un’espressione analoga all’equazione di Laplace si può ottenere per il campo
magnetico trasverso, anch’esso solenoidale ed irrotazionale per onde TEM;
introducendo un potenziale scalare magnetico Ψ si ha:
⇒ ∇ t ⋅ h t = ∇ t ⋅ ( −∇ t Ψ ) = 0 ⇒ ∇ t Ψ = 0
2
• La determinazione di un’onda TEM può essere derivata indifferentemente a
partire dall’equazione di Laplace per Φ o per Ψ.
• Ricavato e t = −∇ t Φ o h t = −∇ t Ψ applicando le opportune condizioni al
contorno, si passa a determinare h t o e t tramite una delle due equazioni
k z z 0 × e t = j ωµ h t
k z z 0 × h t = − j ωε C e t
• Si calcolano poi Ze e Zh, ottenendo così l’espressione completa di un campo
TEM.
48
Microonde - Campi e.m. nelle strutture guidanti
Impedenze d’onda
• Onde TE:
Per le onde TE, eravamo giunti all’espressione:
ht =
kz
j ωµ
z0 × et
Da questa espressione si vede che et, ht e z0 formano una terna rettangola destra
(si tenga tuttavia presente che in genere et e ht sono vettori complessi).
Si vede inoltre che tra et e ht vi è una relazione di proporzionalità fornita dalla:
ZTE =
j ωµ
kz
49
La ZTE ha le dimensioni di un’impedenza, essendo il rapporto tra un campo
elettrico ed uno magnetico:
V ⋅ m −1
=Ω
[ZTE ] =
−1
A⋅m
Inoltre, ZTE non dipende dalle coordinate (q1, q2, z) ma dalle caratteristiche del
mezzo, dalla frequenza e dalla struttura guidante (che, come vedremo,
determina kt2 e quindi anche kz).
Il valore di kz si ricava dalla:
k z2 = k 2 − k t2 = −ω 2 µε C − k t2
In generale dunque kz è una quantità complessa del tipo:
k z = ± (α z + j β z )
(nel seguito ci riferiremo sempre alla radice il cui
valore reale è positivo).
50
Abbiamo visto che nelle strutture guidanti è possibile considerare campi e.m.
caratterizzati dalla seguente proprietà:
E t ( q1, q2 , z ) = et ( q1, q2 ) Ze ( z )
H t ( q1, q2 , z ) = h t ( q1, q2 ) Zh ( z )
con:
Z e ( z ) = P1e k z z + P2 e − k z z
Z h ( z ) = − P1e k z z + P2 e − k z z
La generica dipendenza longitudinale di Et e Ht può essere espressa nella forma:
Z ( z ) = C1e k z z + C 2 e − k z z
La Z(z) è la somma di due componenti:
C1e k z z
onda che si propaga nel verso delle z negative: onda riflessa
C 2 e − k z z onda che si propaga nel verso delle z positive: onda diretta
51
Infatti il primo termine si può scrivere:
C1e k z z = C1e (α z + j β z ) z = C1e α z z e j β z z
Nel dominio del tempo:
C1e α z z e j β z z e jω t = C1e α z z e j ( β z z +ω t )
Per vedere costante la fase dell’onda un osservatore deve muoversi con velocità
data da:
dz
ω
d (ω t + β z z ) = 0 ⇒ ω dt + β z dz = 0 ⇒
=−
dt
βz
che è evidentemente nel verso delle z negative.
Analogamente per il secondo termine C 2 e − k z z si giunge alla relazione:
dz
ω
d (ω t − β z z ) = 0 ⇒ ω dt − β z dz = 0 ⇒
=
βz
dt
esprimente una propagazione nel verso delle z positive
52
Relativamente alla dipendenza longitudinale da z, possono verificarsi tre casi:
• Esiste solo l’onda diretta (C1=0): struttura adattata
Z e ( z ) = P2 e − k z z
E t = e t P2e − kz z
Z h ( z ) = P2 e − k z z
H t = h t P2e − kz z
e quindi:
ht =
kz
j ωµ
z0 × et
Ht
kz
Et
kz
=
z
×
⇒
H
=
z0 × E t
0
t
− kzz
− kz z
j ωµ
j ωµ
P2 e
P2 e
impedenza d’onda TE diretta:
ZTE
(+)
=
j ωµ
kz
53
• Esiste solo l’onda riflessa (C2=0):
Z e ( z ) = P1e k z z
E t = et P1e kz z
Z h ( z ) = − P2 e k z z
H t = −ht P1e kz z
e quindi:
ht =
kz
j ωµ
Ht = −
z0 × et
impedenza d’onda TE riflessa:
ZTE
(−)
kz
j ωµ
z0 × E t
j ωµ
=−
kz
• Esistono l’onda diretta e l’onda riflessa:
k
Ht
kz
Et
ht = z z0 × et
=
z0 ×
kz z
− kzz
j ωµ
j ωµ
− P1e + P2 e
P1e k z z + P2 e − k z z
ZTE
j ωµ P1e k z z + P2 e − k z z
=
k z − P1e k z z + P2 e − k z z
l’impedenza d’onda viene in questo caso a perdere il fondamentale vantaggio di
54
essere indipendente da z.
• Osserviamo che le impedenze d’onda ZTE ( + ) e ZTE ( − ) , oltre a dipendere
dalla struttura guidante e dal mezzo, dipendono dal verso di propagazione
dell’onda, infatti il trasporto di energia procede in versi opposti nel caso di onda
diretta e riflessa (come potrebbe ricavarsi dall’espressione del vettore di
Poynting).
• Onde TM:
Per le onde TM, eravamo giunti all’espressione:
ht =
j ωε C
z0 × et
kz
Tra et e ht vi è una relazione di proporzionalità fornita dalla:
kz
ZTM =
j ωε C
Facendo riferimento ai vettori Et e Ht, si possono trovare le espressioni di
impedenza d’onda nei casi di sola onda diretta, sola onda riflessa, onde diretta e
riflessa, con procedimenti identici a quelli seguiti per le onde TE.
55
• Esiste solo l’onda diretta:
ZTM
(+)
=
• Esiste solo l’onda riflessa:
ZTM
(−)
=−
kz
j ωε C
kz
j ωε C
• Esistono l’onda diretta e l’onda riflessa:
ZTM =
kz
j ωε C
P1e k z z + P2 e − k z z
− P1e k z z + P2 e − k z z
• In un generico mezzo dissipativo, per lo stesso valore di kz, il prodotto di ZTE
e ZTM risulta sempre uguale al quadrato dell’impedenza caratteristica del mezzo
Zm in cui si ha propagazione:
µ
2
ZTE ⋅ ZTM =
= Zm
εC
In un mezzo non dissipativo il prodotto vale µ/ ε.
Nel vuoto il prodotto vale µ0 / ε0 : Z0 = (µ0 / ε0)1/2 ≅ 376.7 è appunto
l’impedenza caratteristica del vuoto.
56
• Onde TEM:
Per le onde TEM, avevamo trovato:
j ωµ
et =
ht × z0
kz
e
et =
kz
j ωε C
ht × z0
Poiché per un’onda TEM è: k z = −ω 2 µε C = k 2 ⇒ k z = ± j ω µε C
2
,
scegliendo la radice positiva, da entrambe le relazioni precedenti discende:
et =
µ
ht × z0
εC
La costante di proporzionalità tra et e ht dipende solo dal mezzo (e non più dalla
forma della guida) e risulta essere uguale all’impedenza caratteristica del mezzo
in cui si ha propagazione:
µ
ZTEM =
= Zm
εC
57
Facendo riferimento ai vettori Et e Ht, anche nel caso di onda TEM si possono
trovare le espressioni dell’impedenza d’onda nei casi di sola onda diretta, sola
onda riflessa, onde diretta e riflessa, con procedimenti identici a quelli seguiti
per le onde TE e le onde TM.
• Esiste solo l’onda diretta:
ZTEM
(+)
µ
εC
=
• Esiste solo l’onda riflessa:
ZTEM
(−)
µ
=−
εC
• Esistono l’onda diretta e l’onda riflessa:
ZTEM =
µ P1e k z + P2 e − k z
ε C − P1e k z + P2 e − k z
z
z
z
z
58
• In letteratura a volte la ZTE viene indicata con Zh e la ZTM con Ze. Ciò è dovuto
al fatto che:
- i campi TE sono chiamati anche onde H, considerando che l’unica
componente presente lungo la direzione di propagazione è quella magnetica
- i campi TM sono chiamati anche onde E, considerando che l’unica
componente presente lungo la direzione di propagazione è quella elettrica
• E’ spesso utile considerare le grandezze inverse delle impedenze d’onda, ossia
le ammettenze d’onda:
YTE
(±)
=
1
ZTE
(±)
=±
YTEM
(±)
kz
YTM
j ωµ
=
1
ZTEM
(±)
(±)
=
1
ZTM
εC
=±
= ±Ym
µ
(±)
j ωε C
=±
kz
59
Microonde - Campi e.m. nelle strutture guidanti
Condizioni al contorno
• Struttura perfettamente conduttrice dal punto di vista elettrico
PEP = parete elettrica perfetta, g=∞
Sulla superficie di una PEP si ha che il campo elettrico è diretto normalmente
E
ad essa ed il campo magnetico tangenzialmente.
Eτ = 0
PEP :
H n = 0
n0
H
All’interno di un conduttore elettrico perfetto il campo e.m. è nullo:
n0 × E = 0 ⇒ Eτ = 0
n0 ⋅ B = 0 ⇒ H n = 0
60
• Dualmente, abbiamo per una struttura perfettamente conduttrice dal punto di
vista magnetico:
PMP = parete magnetica perfetta
che il campo magnetico è diretto normalmente ad essa ed il campo elettrico
tangenzialmente.
H
H = 0
PMP : τ
E n = 0
n0
E
• Sia per le PEP che per le PMP, il vettore di Poynting è tangente alla superficie
il flusso di potenza e.m. è nullo attraverso le pareti PEP e PMP, e tali
pareti manifestano dal lato energetico le stesse proprietà guidanti.
61
• Preciseremo ora quali sono, relativamente ai vari tipi di onda, le condizioni al
contorno implicate dalla presenza di strutture guidanti di tipo PEP (analoghe
considerazioni varrebbero nel caso duale di PMP).
• Ci riferiremo ad una guida d’onda a simmetria cilindrica, costituita da un
supporto metallico ad altissima conducibilità (da noi supposta per semplicità
infinita) con all’interno un dielettrico.
s
La sezione trasversale S della
guida è di forma qualsiasi ma
sempre semplicemente connessa;
il suo contorno s sarà costituito
perciò da una sola linea chiusa.
S
z0
q2
s0
q1
n0
• La trattazione per ricavare le condizioni al contorno sulle onde TE e TM
rimarrà valida anche per strutture con sezione a connessione lineare non
semplice (es. cavi coassiali, linee a striscia, ecc.), invece ciò non avverrà per le
62
onde TEM.
• Onde TE:
Per le onde TE, la condizione E τ = 0 sul contorno s diventa:
et ⋅ s0 = 0
(essendo sempre Ez=0)
e la condizione H n = 0 sul contorno s diventa:
ht ⋅ n0 = 0
(essendo Hzz0 sempre normale a n0)
Queste due condizioni sono ridondanti. Infatti abbiamo:
j ωµ
e t ⋅ s 0 = − 2 z 0 × ∇ t hz ⋅ s 0 = 0
kt
⇒ z 0 × ∇ t hz ⋅ s 0 = s 0 × z 0 ⋅ ∇ t hz = 0 ⇒ n 0 ⋅ ∇ t hz = 0
Poiché il prodotto scalare tra un gradiente di una funzione ed un versore
fornisce la derivata della funzione secondo la direzione del versore, avremo:
∂ hz
=0
sul contorno s ∈ PEP
∂n
Dall’altra condizione si giunge alle stesse conclusioni:
k
∂ hz
h t ⋅ n 0 = z2 ∇ t hz ⋅ n 0 = 0 ⇒
= 0 sul contorno s ∈ PEP
∂n
kt
63
• Onde TM:
Per le onde TM, la condizione E τ = 0 impone una condizione sia sulla
componente trasversale che su quella longitudinale:
et ⋅ s0 = 0
e E z z 0 = 0 ⇒ e z ( q1, q 2 )Z h ( z ) z 0 = 0 ⇒ e z = 0 sul contorno s
La condizione H n = 0 sul contorno s diventa:
ht ⋅ n0 = 0
Queste tre condizioni sono ridondanti. Infatti abbiamo:
k
∂ez
e t ⋅ s 0 = z2 ∇ t e z ⋅ s 0 = 0 ⇒
=0
kt
∂s
Zh (z ) = 0
implicherebbe
l’annullarsi di tutto il campo TM
j ωε C
j ωε C
ht ⋅ n0 =
z 0 × ∇ t ez ⋅ n 0 =
n 0 × z 0 ⋅ ∇ t ez =
2
2
kt
kt
j ωε C
∂ez
=−
s 0 ⋅ ∇ t ez = 0 ⇒
=0
2
kt
∂s
∂ez
Ma la condizione e z = 0 già include la ∂ s = 0
contorno che una PEP impone sul campo TM è:
ez = 0
sul contorno s ∈ PEP
La condizione al
64
• Onde TEM:
Per le onde TM, la condizione E τ = 0 impone:
et ⋅ s0 = 0
sul contorno s
La condizione H n = 0 diventa:
ht ⋅ n0 = 0
sul contorno s
Anche in questo caso le due condizioni sono ridondanti. Infatti si ha:
∂Φ
=0
∂s
k
∂Φ
ht ⋅ n0 = − z z0 × ∇t Φ ⋅ n0 ⇒
=0
j ωµ
∂s
e t ⋅ s 0 = −∇ t Φ ⋅ s 0 = 0 ⇒
Dunque per un’onda TEM la condizione al contorno imposta dalla PEP è:
∂Φ
sul contorno s ∈ PEP
=0
65
∂s
• Dalla condizione
∂Φ
=0
∂s
sul contorno s ∈ PEP
deriva che Φ è costante su s.
Essendo d’altra parte la Φ soluzione dell’equazione di Laplace, deve
godere della tipica proprietà di assumere i valori massimi e minimi sulla
frontiera del dominio di definizione.
Nel nostro caso, Φ è definita su una generica sezione S a connessione
semplice avente come frontiera il bordo s, quindi la condizione trovata
Φ =costante su s, implica che Φ sia costante su tutta la sezione
trasversale S.
• La Φ costante su tutta S, implica ∇t Φ = 0 , da cui: et =0 e ht =0.
Essendo già Ez=Hz=0, si vede che il campo e.m. TEM è sempre nullo:
in una guida d’onda PEP a sezione semplicemente connessa non
possono propagarsi onde TEM
• In strutture guidanti aventi sezione a connessione multipla la
condizione Φ costante sui bordi non implica che Φ sia costante su tutta
S e quindi si possono avere campi TEM nel caso, ad esempio, del cavo
66
coassiale o delle linee a striscia.
Microonde - Campi e.m. nelle strutture guidanti
Autovalori ed Autofunzioni
• Si è visto come in una guida d’onda ideale sia possibile ricavare
l’espressione del campo TE o del campo TM attraverso la risoluzione di
un’equazione differenziale alle derivate parziali, del secondo ordine, scalare,
omogenea, del tipo:
∇ t2T = k t2T
in cui:
2
2
T = hz ( q1, q 2 ) per le onde TE ⇒ ∇ t hz = k t hz
T = e z ( q1, q 2 ) per le onde TM ⇒ ∇ t2 e z = k t2 e z
k 2 = k t2 + k z2 = −ω 2 µε C
(1)
(2)
• Per risolvere le equazioni (1) e (2) vanno imposte le condizioni al contorno
per la guida, che nel caso di parete elettrica perfetta sono:
∂ hz
=0
sul contorno s ∈ PEP per le onde TE
∂n
67
∈
sul
contorno
s
PEP
per
le
onde
TM.
ez = 0
• Le condizioni al contorno, in relazione alla particolare forma e dimensione
della sezione della struttura guidante, determinano i valori di k t2 . In tutti i casi
che ci interessano, k t2 può assumere una infinità numerabile di valori che
vengono chiamati autovalori dell’equazione differenziale (1) o (2) (che viene
infatti detta equazione differenziale agli autovalori).
• Per ogni autovalore k t2 si può ricavare la corrispondente soluzione T che
viene detta autofunzione (in genere determinata a meno di una costante
moltiplicativa, essendo l’equazione differenziale agli autovalori una
equazione omogenea).
• A partire dall’autofunzione si può risalire all’espressione dell’intero campo
e.m. con le note relazioni derivate dalle Equazioni di Maxwell. Il campo e.m.
associato a ciascun autovalore k t2 viene detto modo di propagazione. Per
quanto detto, in una guida d’onda PEP a simmetria cilindrica si ha un’infinità
numerabile di modi TE e TM, mentre non esistono campi TEM.
68
• Dimostriamo il seguente teorema:
In una guida d’onda ideale (PEP) il generico k t2 per modi TE e TM è una
quantità reale negativa.
In relazione al solito sistema di riferimento scriviamo il Lemma di Green in
due dimensioni:
∫ ∇ t ⋅ ( X ∇ tY ) dS =
S
⇒
∫
+s
X
∫
+s
(
)
X ∇ tY ⋅ n 0 ds = ∫ ∇ t X ⋅ ∇ tY + X ∇ t Y dS
S
(
2
)
∂Y
2
ds = ∫ ∇ t X ⋅ ∇ tY + X ∇ t Y dS
∂n
S
Caso di onde TM:
Se poniamo X = e z ( q1, q 2 ) e Y = e z∗ ( q1, q 2 ) il Lemma di Green diviene:
∂ e z∗
2 ∗
∗
e
ds
e
e
e
=
∇
⋅
∇
+
∇
t z
t z
z
t e z dS
∫ z ∂n
∫
+s
S
Per le onde TM, dalle condizioni al contorno si ha e z = 0 su s, per cui
l’integrale a primo membro è nullo.
2
2 ∗
2
∗
⇒ ∫ ∇ t e z ⋅ ∇ t e z + e z ∇ t e z dS = ∫ ∇ t e z dS + ∫ e z ∇ t e z∗ dS = 69
0
(
S
(
)
)
S
S
Dall’equazione di Helmholtz si ha:
(
∇ ez = k ez ⇒ ∇ ez
2
t
2
t
2
t
) = (k
∗
2
t
ez
)
∗
2∗
t
∗
⇒ ∇ ez = k ez
2
t
∗
e quindi:
∫
2∗
t
2
∗
∇ t e z dS + ∫ e z k e z dS = 0 ⇒
S
S
∫
2
∇ t e z dS +k
S
2∗
⇒ kt
=−
∫
2∗
t
∫
2
e z dS = 0
S
2
∇ t e z dS
S
∫
2
ez d S
= k t2
S
∗
Nell’espressione ottenuta per k t2 , l’integrale a denominatore fornisce un
contributo certamente reale e positivo (se e z = 0 su tutta S, si avrebbe
l’annullamento dell’intero campo e.m.).
L’integrale a numeratore è anch’esso reale e positivo (se fosse ∇ t e z = 0 su
tutta S, cioè e z costante su S, ne deriverebbe - dovendo essere e z = 0 su s che e z = 0 in ogni punto di S, col conseguente completo annullamento del
campo e.m.).
∗
Quindi k t2 è reale negativo e coincide con il generico autovalore k t2.
70
Caso di onde TE:
Se poniamo Y = hz ( q1, q 2 ) e X = hz∗ ( q1, q 2 ) il Lemma di Green diviene:
∂ hz
ds = ∫ ∇ t hz∗ ⋅ ∇ t hz + hz∗∇ t 2 hz dS
∂n
+s
S
∂ hz
Dalle condizioni al contorno (
= 0 su s) e dall’equazione di Helmholtz
( ∇ 2 h = k 2 h ), ricaviamo: ∂ n
(
∗
h
∫ z
t
z
t
)
z
∫∇h
t
0=
∫
S
2
2
∇ t hz dS +k t2 ∫ hz dS ⇒ k t2 = −
S
2
z
dS
S
∫
2
hz d S
S
Nell’espressione ottenuta per k t2 , l’integrale a denominatore è reale e positivo
(se hz = 0 su tutta S, si avrebbe l’annullamento dell’intero campo e.m.).
L’integrale a numeratore è non negativo, potendosi avere su tutta S ∇ t hz = 0 ,
cioè hz costante (infatti ciò non è in contrasto con la condizione al contorno).
In corrispondenza a questo caso si ha k t2 nullo. Ma hz costante su S dà luogo a
campi in cui è presente la sola componente magnetica longitudinale: questa
particolare soluzione TE è di scarso interesse pratico, perciò si può pensare di
escludere le autofunzioni hz costanti.
71
2
Allora k t risulterà ancora reale negativo.
• Il risultato ottenuto per k t2 , con tutte le conseguenze che ne derivano, è
valido solo nel caso di guide d’onda perfettamente conduttrici (g= ∞, quando
sono verificate le condizioni al contorno ∂ hz / ∂ n = 0 su s per le onde TE e
e z = 0 su s per le onde TM).
Vedremo in seguito le modifiche relative a guide d’onda con g<∞ (guide
d’onda con perdite dovute alla conducibilità finita del mantello cilindrico).
• Il fatto che k t2 sia reale negativo implica notevoli proprietà:
Le autofunzioni relative a diversi autovalori risultano ortogonali fra
1)
loro, con importanti conseguenze dal punto di vista energetico.
2)
Le autofunzioni (determinate a meno di una costante moltiplicativa
complessa) possono essere considerate sempre reali, senza perdita di
generalità.
I modi TE e TM in una guida d’onda ideale sono onde piane non
3)
uniformi.
La prima proprietà verrà studiata meglio in seguito.
Ora dimostriamo invece la seconda e la terza proprietà.
72
• Dimostrazione della seconda proprietà (autofunzioni considerabili sempre
reali):
Per un’autofunzione T generalmente complessa si può scrivere: T=TR+jTJ con
TR e TJ funzioni reali. L’equazione di Helmholtz ∇ t2T = k t2T diviene allora:
(
)
∇ t2 (TR + jTJ ) = k t2 (TR + jTJ ) ⇒ ∇ t2TR − k t2TR + j ∇ t2T J − k t2T J = 0
Poiché k t2 è reale, l’annullamento della parte reale e della parte immaginaria
dell’espressione precedente implica:
∇ t2TR = k t2TR
e
∇ t2T J = k t2T J
Scomponendo anche le condizioni al contorno su T nelle componenti reale ed
immaginaria, ci si può quindi ricondurre sempre alla soluzione dell’equazione
di Helmholtz per funzioni reali, esprimendo le soluzioni generali come loro
combinazione lineare a coefficienti generalmente complessi.
73
• Dimostrazione della terza proprietà (i modi TE e TM in una guida d’onda
ideale sono onde piane non uniformi):
Come abbiamo visto, sia nelle componenti trasversali (Et, Ht) che nelle
componenti longitudinali (Ezz0, Hzz0) per una generica onda TE o TM, si ha
sempre la presenza di un fattore relativo alla dipendenza trasversale esprimibile in funzione di T(q1 , q2) - e di un fattore relativo alla dipendenza
longitudinale - tramite la Z(z).
Essendo T(q1 , q2) reale, la fase di ogni componente (collegata con la parte
immaginaria) non varia con q1 , q2 mentre dipende solo da z. Quindi i piani
equifase sono piani z=cost..
Pertanto i modi TE e TM nelle guide d’onda ideali sono onde piane non
uniformi.
74
Microonde - Campi e.m. nelle strutture guidanti
Autovalori ed Autofunzioni
• Si è visto come in una guida d’onda ideale sia possibile ricavare
l’espressione del campo TE o del campo TM attraverso la risoluzione di
un’equazione differenziale alle derivate parziali, del secondo ordine, scalare,
omogenea, del tipo:
∇ t2T = k t2T
in cui:
2
2
T = hz ( q1, q 2 ) per le onde TE ⇒ ∇ t hz = k t hz
T = e z ( q1, q 2 ) per le onde TM ⇒ ∇ t2 e z = k t2 e z
k 2 = k t2 + k z2 = −ω 2 µε C
(1)
(2)
• Per risolvere le equazioni (1) e (2) vanno imposte le condizioni al contorno
per la guida, che nel caso di parete elettrica perfetta sono:
∂ hz
= 0 sul contorno s ∈ PEP per le onde TE
∂n
75
per
le
onde
TM.
sul contorno s ∈ PEP
ez = 0
• Le condizioni al contorno, in relazione alla particolare forma e dimensione
della sezione della struttura guidante, determinano i valori di k t2 . In tutti i casi
che ci interessano, k t2 può assumere una infinità numerabile di valori che
vengono chiamati autovalori dell’equazione differenziale (1) o (2) (che viene
infatti detta equazione differenziale agli autovalori).
• Per ogni autovalore k t2 si può ricavare la corrispondente soluzione T che
viene detta autofunzione (in genere determinata a meno di una costante
moltiplicativa, essendo l’equazione differenziale agli autovalori una
equazione omogenea).
• A partire dall’autofunzione si può risalire all’espressione dell’intero campo
e.m. con le note relazioni derivate dalle Equazioni di Maxwell. Il campo e.m.
associato a ciascun autovalore k t2 viene detto modo di propagazione. Per
quanto detto, in una guida d’onda PEP a simmetria cilindrica si ha un’infinità
numerabile di modi TE e TM, mentre non esistono campi TEM.
76
• Dimostriamo il seguente teorema:
In una guida d’onda ideale (PEP) il generico k t2 per modi TE e TM è una
quantità reale negativa.
In relazione al solito sistema di riferimento scriviamo il Lemma di Green in
due dimensioni:
∫ ∇ t ⋅ ( X ∇ tY ) dS =
S
⇒
∫
+s
X
∫
+s
(
)
X ∇ tY ⋅ n 0 ds = ∫ ∇ t X ⋅ ∇ tY + X ∇ t Y dS
S
(
2
)
∂Y
2
ds = ∫ ∇ t X ⋅ ∇ tY + X ∇ t Y dS
∂n
S
Caso di onde TM:
Se poniamo X = e z ( q1, q 2 ) e Y = e z∗ ( q1, q 2 ) il Lemma di Green diviene:
∂ e z∗
2 ∗
∗
e
ds
e
e
e
=
∇
⋅
∇
+
∇
t z
t z
z
t e z dS
∫ z ∂n
∫
+s
S
Per le onde TM, dalle condizioni al contorno si ha e z = 0 su s, per cui
l’integrale a primo membro è nullo.
2
2 ∗
2
∗
⇒ ∫ ∇ t e z ⋅ ∇ t e z + e z ∇ t e z dS = ∫ ∇ t e z dS + ∫ e z ∇ t e z∗ dS = 77
0
(
S
(
)
)
S
S
Dall’equazione di Helmholtz si ha:
(
∇ ez = k ez ⇒ ∇ ez
2
t
2
t
2
t
) = (k
∗
2
t
ez
)
∗
2∗
t
∗
⇒ ∇ ez = k ez
2
t
∗
e quindi:
∫
2∗
t
2
∗
∇ t e z dS + ∫ e z k e z dS = 0 ⇒
S
S
∫
2
∇ t e z dS +k
S
2∗
⇒ kt
=−
∫
2∗
t
∫
2
e z dS = 0
S
2
∇ t e z dS
S
∫
2
ez d S
= k t2
S
∗
Nell’espressione ottenuta per k t2 , l’integrale a denominatore fornisce un
contributo certamente reale e positivo (se e z = 0 su tutta S, si avrebbe
l’annullamento dell’intero campo e.m.).
L’integrale a numeratore è anch’esso reale e positivo (se fosse ∇ t e z = 0 su
tutta S, cioè e z costante su S, ne deriverebbe - dovendo essere e z = 0 su s che e z = 0 in ogni punto di S, col conseguente completo annullamento del
campo e.m.).
∗
Quindi k t2 è reale negativo e coincide con il generico autovalore k t2.
78
Caso di onde TE:
Se poniamo Y = hz ( q1, q 2 ) e X = hz∗ ( q1, q 2 ) il Lemma di Green diviene:
∂ hz
2
ds = ∫ ∇ t hz∗ ⋅ ∇ t hz + hz∗∇ t hz dS
∂n
+s
S
∂ hz
Dalle condizioni al contorno (
= 0 su s) e dall’equazione di Helmholtz
( ∇ 2 h = k 2 h ), ricaviamo: ∂ n
(
∗
h
∫ z
t
z
t
)
z
∫∇h
t
0=
∫
S
2
2
∇ t hz dS +k t2 ∫ hz dS ⇒ k t2 = −
S
2
z
dS
S
∫
2
hz d S
S
Nell’espressione ottenuta per k t2 , l’integrale a denominatore è reale e positivo
(se hz = 0 su tutta S, si avrebbe l’annullamento dell’intero campo e.m.).
L’integrale a numeratore è non negativo, potendosi avere su tutta S ∇ t hz = 0 ,
cioè hz costante (infatti ciò non è in contrasto con la condizione al contorno).
In corrispondenza a questo caso si ha k t2 nullo. Ma hz costante su S dà luogo a
campi in cui è presente la sola componente magnetica longitudinale: questa
particolare soluzione TE è di scarso interesse pratico, perciò si può pensare di
escludere le autofunzioni hz costanti.
79
2
Allora k t risulterà ancora reale negativo.
• Il risultato ottenuto per k t2 , con tutte le conseguenze che ne derivano, è
valido solo nel caso di guide d’onda perfettamente conduttrici (g=∞, quando
sono verificate le condizioni al contorno ∂ hz / ∂ n = 0 su s per le onde TE e
e z = 0 su s per le onde TM).
Vedremo in seguito le modifiche relative a guide d’onda con g<∞ (guide
d’onda con perdite dovute alla conducibilità finita del mantello cilindrico).
• Il fatto che k t2 sia reale negativo implica notevoli proprietà:
Le autofunzioni relative a diversi autovalori risultano ortogonali fra
1)
loro, con importanti conseguenze dal punto di vista energetico.
2)
Le autofunzioni (determinate a meno di una costante moltiplicativa
complessa) possono essere considerate sempre reali, senza perdita di
generalità.
I modi TE e TM in una guida d’onda ideale sono onde piane non
3)
uniformi.
La prima proprietà verrà studiata meglio in seguito.
Ora dimostriamo invece la seconda e la terza proprietà.
80
• Dimostrazione della seconda proprietà (autofunzioni considerabili sempre
reali):
Per un’autofunzione T generalmente complessa si può scrivere: T=TR+jTJ con
TR e TJ funzioni reali. L’equazione di Helmholtz ∇ t2T = k t2T diviene allora:
(
)
∇ t2 (TR + jTJ ) = k t2 (TR + jTJ ) ⇒ ∇ t2TR − k t2TR + j ∇ t2T J − k t2T J = 0
Poiché k t2 è reale, l’annullamento della parte reale e della parte immaginaria
dell’espressione precedente implica:
∇ t2TR = k t2TR
e
∇ t2T J = k t2T J
Scomponendo anche le condizioni al contorno su T nelle componenti reale ed
immaginaria, ci si può quindi ricondurre sempre alla soluzione dell’equazione
di Helmholtz per funzioni reali, esprimendo le soluzioni generali come loro
combinazione lineare a coefficienti generalmente complessi.
81
• Dimostrazione della terza proprietà (i modi TE e TM in una guida d’onda
ideale sono onde piane non uniformi):
Come abbiamo visto, sia nelle componenti trasversali (Et, Ht) che nelle
componenti longitudinali (Ezz0, Hzz0) per una generica onda TE o TM, si ha
sempre la presenza di un fattore relativo alla dipendenza trasversale esprimibile in funzione di T(q1 , q2) - e di un fattore relativo alla dipendenza
longitudinale - tramite la Z(z).
Essendo T(q1 , q2) reale, la fase di ogni componente (collegata con la parte
immaginaria) non varia con q1 , q2 mentre dipende solo da z. Quindi i piani
equifase sono piani z=cost..
Pertanto i modi TE e TM nelle guide d’onda ideali sono onde piane non
uniformi.
82
Microonde - Campi e.m. nelle strutture guidanti
Dipendenza longitudinale dei campi TE e TM
• La dipendenza longitudinale dei campi TE e TM in guida d’onda ideale è
collegata con la costante kz infatti si era posto genericamente:
Z ( z ) = C1e k z z + C 2 e − k z z
Il primo termine rappresenta un’onda riflessa, il secondo un’onda diretta.
Ricordiamo anche che: per Ze(z) si ha C1=P1 e C2=P2;
per Zh(z) si ha C1=-P1 e C2=P2.
• kz è legato a k2 e kt2 dalla relazione di separabilità:
k 2 = k t2 + k z2 = −ω 2 µε C
per cui si ha che kz è in genere una quantità complessa:
k z = ± k 2 − k t2 = ± (α z + j β z )
α z = Re( k z )
β z = Im ( k z )
83
• Dall’espressione di Z(z) si può notare che αz indica una sua variazione
dell’ampiezza mentre βz indica una sua variazione della fase, al variare della
coordinata longitudinale z.
• Riferiamoci ora a guide di tipo PEP nel cui interno vi sia un dielettrico non
dissipativo, avente cioè conducibilità nulla (es.:aria “secca”): εc= ε , per cui
k2=-ω2 µε è reale non positivo (in genere supporremo comunque di non
essere in un caso statico, cioè ω≠0 ; inoltre riterremo il mezzo non dispersivo,
per cui ε e µ non dipendono da ω).
• Con questa ipotesi fondamentale, kz risulta dato dalla radice quadrata della
differenza tra due quantità negative e pertanto è o reale o immaginario puro.
Scegliendo la determinazione positiva per la radice:
k z reale = α z > 0, se k 2 > k t2
k z = ± −ω 2 µε − k t2 =
k z = 0 se k 2 = k t2
k z immaginario = j β z , se k 2 < k t2
84
• Quando k 2 > k t2 (cioè ω 2 µε < k t2 ) si ha k z reale (positivo) e l’onda ha una
dipendenza da z del tipo:
Z ( z ) = C1e α z z + C 2 e −α z z
Se c’è solo l’onda diretta, il campo ha fase costante e si attenua in ampiezza
al crescere di z.
• Quando k 2 < k t2 (cioè ω 2 µε > k t2 ) si ha k z immaginario puro (con β z > 0)
e l’onda ha una dipendenza da z del tipo:
Z ( z ) = C1e j β z z + C 2 e − j β z z
Se c’è solo l’onda diretta, il campo si propaga nel verso delle z positive senza
attenuazione (ampiezza costante, fase variabile con z).
• Quando k 2 = k t2 (cioè ω 2 µε = k t2 ) si ha k z nullo: questo è il caso che
separa le due situazioni, così diverse dal punto di vista fisico, di onda che si
attenua in ampiezza e onda che si propaga senza attenuazione al crescere di z.
Quando k z è nullo, l’onda non dipende più dalla coordinata longitudinale,
avendosi Z(z) costante in modulo e fase.
85
• Noto k t2 (determinato dalle condizioni al contorno e da forma e dimensioni
della guida) si può risalire al valore della pulsazione ωc per cui k z = 0 :
−ω c2 µε = k t2 ⇒ ω c =
− k t2
µε
reale > 0
• La frequenza corrispondente a ωc, cioè fc= ω c/2π, prende il nome di
frequenza di taglio o frequenza di cut-off, relativa ad un certo modo di
propagazione nella guida, determinato dal corrispondente autovalore k t2 .
• Per frequenze superiori a quella di taglio l’onda si propaga senza attenuarsi:
ω > ω c ⇒ k 2 = ω 2 µε > k t2 = ω c2 µε
Per frequenze inferiori a quella di taglio l’onda si attenua al crescere di z:
ω < ω c ⇒ k 2 = ω 2 µε < k t2 = ω c2 µε
La guida d’onda ideale si comporta come un filtro passa-alto per i
campi TE e TM.
86
• Si può esprimere k z in funzione di ωc:
2
ω
c
k z = −ω 2 µε + ω c2 µε = ω 2 µε ( − 1 + ω c2 µ ε / ω 2 ) = ω µε
−1
2
ω
• k z risulta essere funzione:
- del mezzo tramite µ e ω
- della particolare struttura guidante tramite k t ovvero ωc
- della frequenza, al variare della quale si ha, come visto:
per 0 < ω < ω c: Re( k z ) = α z
kz =
e
Im ( k z ) = 0
per
ω = ωc :
Re( k z ) = 0
e
Im ( k z ) = 0
per
ω > ωc :
Re( k z ) = 0
e
Im ( k z ) = β z
• Esaminiamo in dettaglio l’andamento di k z in funzione di ω, studiando la
parte reale e la parte immaginaria.
Parte reale di k z :
ω c2
− 1 87
E’ nulla per ω ≥ ω c . Per 0 < ω < ω c si ha: α z = ω µε
2
ω
e quindi:
α = −ω µε + ω µε ⇒
2
z
2
2
c
(ω
che è l’equazione canonica di un’ellisse
avente asse maggiore (passante per i
fuochi) di lunghezza 2ω c , asse minore
di lunghezza 2ω c µε , e centro
nell’origine delle coordinate.
α z2
c
µε
)
2
ω2
+ 2 =1
ωc
Re( k z )
(0, ω c µε )
(ω c ,0)
ω
Parte immaginaria di k z :
ω c2
E’ nulla per 0 < ω ≤ ω c . Per ω > ω c si ha: j β z = j ω µε 1 − 2 e quindi:
ω
2
2
ω
βz
=1
β z2 = ω 2 µε − ω c2 µε ⇒ 2 −
2
ωc
ω µε
(
che è l’equazione canonica di un’iperbole
avente asse focale che coincide con quello delle ω (con l’origine equidistante dai
due fuochi); gli asintoti hanno equazione: β z = ±ω µε
c
)
Im ( k z )
β z = ±ω µε
(ω c ,0)
88
ω
• Per frequenze molto alte la costante di fase k z in propagazione guidata
tende a quella nello spazio libero (come si vede dal grafico della parte
immaginaria di k z ). Ciò si può spiegare intuitivamente considerando che per
frequenze molto alte le lunghezze d’onda sono molto piccole rispetto alle
dimensioni della guida, che ai fini della propagazione non differisce più
molto dal comportamento dello spazio libero.
• Ad una frequenza di lavoro fL, i modi aventi fc > fL si attenuano
esponenzialmente con z, mentre i modi aventi fc < fL si propagano senza
attenuazione lungo la guida.
• Il modo avente frequenza di taglio più bassa (corrispondente al valore
minimo di k t2 ) viene detto modo dominante.
• Ai fini di un efficace trasporto di energia in una guida, conviene che questa
sia legata alla propagazione di un solo modo: la banda in cui si lavora è
quindi compresa fra la frequenza di taglio del modo dominante e quella del
modo immediatamente superiore (al di fuori di questa banda si avrebbe89
infatti o assenza di propagazione o propagazione anche di altri modi).
Microonde - Campi e.m. nelle strutture guidanti
Velocità di fase
• In regime armonico, supponendo che sia presente la sola onda diretta (guida
adattata), una qualsiasi componente del campo TE o TM ha un’espressione
spazio-temporale del tipo:
A ( q1, q 2 , z, t ) = Re Cf ( q1, q 2 )e − k z z e jω t = Re Cf ( q1, q 2 )e −α z z e j ( ω t − β z z )
La fase dell’onda è legata al termine esponenziale immaginario:
Φ (t , z ) = ω t − β z z
Per un osservatore che si muove senza notare variazione di fase:
dz
ω
1
=
=
= uz
d Φ ( t , z ) = ω dt − β z dz = 0 ⇒
2
βz
dt
ω
µε 1 − c
uz
ω
velocità di fase
(0, c )
(ω c ,0)
ω
90
Microonde - Campi e.m. nelle strutture guidanti
Velocità dell’energia
• In regime armonico monocromatico (dipendenza temporale del tipo e jω t ),
il valor medio della densità di energia e.m. (energia per unità di volume) è:
W ( q 1, q 2 , z ) = W E + W H =
(
1
∗
∗
εE ⋅E + µH ⋅H
4
)
J ⋅ m −3
• Il vettore di Poynting è:
P =
1
∗
E ×H
2
W ⋅ m −2
• La potenza media (energia media nell’unità di tempo) che attraversa la
sezione S della guida è la parte reale del flusso del vettore di Poynting su S:
Pz = Re ∫
S
(
)
1
∗
E × H ⋅ z 0 dS
2
[W ]
91
• Nel tempo infinitesimo dt l’energia immagazzinata nel volume di base S e
altezza dz è:
dE z = Pz dt = ∫ W d τ = ∫ W dS ⋅ dz = W z dz
[J ]
τ
S
avendo posto: W z = ∫ W dS J ⋅ m −1 , energia per unità di lunghezza.
S
Si definisce velocità dell’energia la quantità:
uW
dz
Pz
=
=
=
dt W z
Re ∫
∫
S
(
S
1
∗
E × H ⋅ z 0 dS
2
)
1
∗
∗
ε E ⋅ E + µ H ⋅ H dS
4
m ⋅ s − 1
Questa espressione del tutto generale si semplifica per i modi TE e TM,
assumendo nei due casi lo stesso valore (che come vedremo viene a
coincidere con quello della velocità di gruppo).
92
• Modi TM:
Quando si propaga la sola onda diretta, in completa assenza di perdite, si ha:
E = E t + z 0Ez = P2e − j β z z et + P2e − j β z z ez z 0
H = H t = P2e − j β z z ht
Per il calcolo di Pz si ha che:
∗
∗
∗
E × H = E t × H t + Ez z0 × H t
il secondo addendo rappresenta un vettore giacente sul piano trasversale ed è
pertanto ininfluente ai fini del valore del flusso secondo z 0 :
1
1
∗
∗
Pz = Re ∫ E t × H t ⋅ z 0 dS = Re ∫ E t ⋅ H t × z 0 dS
2
2
S
S
Si era ricavato:
∗
kz
1
∗
(+)
E t = ZTM H t × z 0 =
H t × z 0 ⇒ ( H t × z 0 ) =
E t
(+)
j ωε C
ZTM
∗
⇒ H t × z0 =
ωε ∗
Et
βz
93
Allora per Pz si ha:
1
ωε
∗
Pz = Re ∫ E t ⋅ H t × z 0 dS =
2
2βz
S
∫E
2
t
S
2
ωε
∗
dS =
P2 P2 ∫ e t dS
2βz
S
Per il calcolo di Wz si ha:
∫
S
1
∗
µ H ⋅ H dS =
4
∫
S
1
2
µ H t dS =
4
∫
S
Et
2
1
µ
4 Z (+)
TM
(
)
2
dS =
2
ω 2 µε 2
ω 2 µε 2
2
∗
=∫
E t dS =
P2 P2 ∫ e t dS
2
2
4βz
S 4βz
S
e
∫
S
1
∗
ε E ⋅ E dS =
4
∫
S
(
1
ε Et
4
2
+ Ez
2
) dS = 4 P P
ε
2
∗
2
∫e
S
2
t
dS +
ε
4
∗
2
P2 P
∫e
S
94
2
z
dS
L’integrale in cui compare e z può essere espresso in funzione di e t , infatti
si era trovato:
2
∫
k
2
t
=−S
∇ t e z dS
∫
2
e z dS
S
pertanto:
∫∇e
t
∫
2
ez d S = −
S
2
z
dS
S
k t2
Dall’espressione dei campi TM si ha:
2
k
k
e t = z2 ∇ t e z ⇒ ∇ t e z = t e t
jβz
kt
e quindi:
ε
4
∗
2
P2 P
∫e
S
2
z
2
k t2 ε
∗
dS = −
P2 P2 ∫ e t dS
2
4βz
S
95
Tutto il contributo a Wz dell’energia elettrica può allora riscriversi come:
∫
S
2
2
2
2
k t2 ε
1
ω
µε
∗
∗
∗
P2 P2 ∫ e t d S
ε E ⋅ E dS = 1 − 2 P2 P2 ∫ e t dS =
2
4
βz 4
4βz
S
S
Si vede quindi che la densità di energia elettrica media immagazzinata è
uguale a quella magnetica. Ciò poteva dedursi anche con semplici
considerazioni sul Teorema di Poynting complesso (potenza reattiva nulla in
una guida senza perdite).
Possiamo finalmente ricavare il valore della velocità dell’energia per i modi
TM:
uW
2
ωε
∗
P2 P2 ∫ e t dS
2βz
Pz
βz
S
=
= 2 2
=
2
ω µε
Wz
ωµε
∗
P
P
e
dS
2 2 ∫
t
2 β z2
S
96
La velocità dell’energia può essere equivalentemente espressa in funzione di
altre tipiche grandezze già note, ad esempio:
uW
βz
ZT( M+ )
β zc c 2
ω
=
=
=
=
= c 1− c
ωµε
µ
k
uz
ω
2
La velocità dell’energia, che è una velocità fisica, risulta sempre minore di
quella della luce nel mezzo c.
uz
(0, c )
(ω c ,0)
ω
97
Microonde - Campi e.m. nelle strutture guidanti
Velocità di gruppo
• Le definizioni e le proprietà della velocità di fase e della velocità
dell’energia, introdotte in precedenza, sono relative ad onde e.m. di tipo
monocromatico che si propagano in guide d’onda ideali.
• Un fenomeno che ha dipendenza temporale di tipo puramente sinusoidale,
però, rappresenta un segnale non avente alcun contenuto informativo. Si ha un
segnale utile solo se la grandezza sinusoidale è soggetta ad una modulazione.
• In maniera del tutto generale dovremo riferirci ad un segnale in cui siano
presenti più frequenze contemporaneamente. In particolare dovremo esaminare
come si propaga in guida un campo e.m. che occupa una certa banda di
frequenze in relazione al suo spettro.
• Vedremo che un segnale avente uno spettro di frequenze molto stretto non
viene distorto nella trasmissione lungo la guida (canale perfetto),
propagandosi con una certa velocità che sarà definita velocità di gruppo.98
• In effetti possono considerarsi non distorti quei segnali composti da uno
strettissimo spettro di frequenze (in cui β z (ω ) può essere sostituito con buona
approssimazione dal relativo sviluppo di Taylor del primo ordine), ovvero quelli
aventi frequenze molto elevate (zona in cui β z (ω ) tende asintoticamente alla
retta ω µε
dipendenza lineare da ω).
• Consideriamo ora un caso particolarmente significativo, come esempio di
quanto detto: la propagazione in guida di un segnale con dipendenza temporale
del tipo
f ( t ) = m ( t ) cos ω 0 t
dove m(t) è una funzione avente una banda in frequenza compresa fra -fm e +f m
(-ωm/2π e +ωm /2π) che modula un segnale armonico con frequenza portante f0
ed è collegato al contenuto informativo.
Si ha: f0 ≪ fm. Nell’ipotesi
semplificativa di m(t) reale pari,
M(ω)
la M(ω) viene considerata reale.
-ωm
0
ωm
ω
99
• Lo spettro di frequenze di cos(ωmt) è costituito da due impulsi di area 1/2
centrati in ω=+ω0 e ω=-ω0 cioè:
1
ℑ{cos(ω 0t )} = [δ (ω − ω 0 ) + δ (ω + ω 0 ) ]
2
(essendo anche cos(ωmt) reale
ℑ{cos(ω 0t )}
pari, la sua Trasformata di
1/2
Fourier è reale)
-ω0
0
ω0
ω
• Esprimendo il coseno in forma esponenziale ed applicando la proprietà di
traslazione in frequenza della Trasformata di Fourier, possiamo ottenere lo
spettro in ω di f(t):
+∞
+∞
e jω0t + e − jω0t − jωt
− jω t
F (ω ) = ℑ{ f (t )} = ∫ m(t ) cos(ω 0t )e dt = ∫ m(t )
e dt =
2
−∞
−∞
+∞
+∞
1
1
1
= ∫ m(t )e − j (ω −ω0 )t dt + ∫ m(t )e − j (ω +ω0 )t dt = [ M (ω − ω 0 ) + M (ω + ω 0 )]
2 −∞
2 −∞
2
100
Il segnale f(t) è limitato in banda con banda ωm/2π centrata in ω0/2π :
F (ω ) = ℑ{m(t ) cos(ω 0t )}
-ω0-ωm -ω0 ωm-ω0
0
ω0-ωm ω0 ω0+ωm
ω
•:Antitrasformando si ottiene il segnale di uscita f0(t):
+∞
+∞
1
1
1
− j β z (ω ) l jω t
jω t
f 0 (t ) =
F0 (ω )e dω = 2 Re
M (ω − ω 0 )e
e dω =
∫
∫
2π −∞
2π 0 2
1 ω0 +ωm
jω t − j β z (ω ) l
= Re
M (ω − ω 0 )e
dω
∫
2π ω0 −ωm
avendo sfruttato il fatto che F0(ω) ha parte reale pari e parte immaginaria
dispari (essendo l’uscita f0(t) un segnale reale), e che F(ω) risulta (per
frequenze positive) non nullo solo nella banda (ω0-ωm , ω0+ωm).
101
• Nell’ipotesi che la banda del segnale sia molto stretta (ω0 ≪ ωm), β z (ω )
può essere approssimato con i primi termini dello sviluppo in serie di Taylor
intorno a ω0; in particolare, in relazione anche al comportamento di β z (ω )
alle frequenze molto elevate, si può pensare di arrestare lo sviluppo al termine
di primo grado:
d β z (ω )
β z (ω ) ≅ β z (ω 0 ) +
(ω − ω 0 ) = β z (ω 0 ) + β zI (ω 0 ) (ω − ω 0 )
d ω ω =ω
0
1 ω0 +ωm
jω ( t − β z '(ω 0 ) l ) − j β z (ω 0 ) l + j β z '(ω0 ) lω0
⇒ f 0 (t ) = Re
M (ω − ω 0 )e
e
dω =
∫
2π ω0 −ωm
1 − j β (ω )l + j β '(ω )lω ω0 +ωm
j (ω −ω 0 )( t − β z '(ω0 ) l ) jω 0 ( t − β z '(ω 0 ) l )
z
0
z
0
0
= Re e
M (ω − ω 0 )e
e
dω =
∫
2π
ω0 −ω m
= Re e − j β z (ω0 )l + j β z '(ω0 )lω0 ℑ−1 M (ω )e − j β z '(ω0 )l e jω0 (t − β z '(ω0 )l ) =
= Re e − j β z (ω0 )l + j β z '(ω0 )lω0 m(t − β z '(ω 0 )l )e jω0 (t − β z '(ω0 )l ) =
{
= m(t − β z '(ω 0 )l ) cos(ω 0t − β z (ω 0 )l )
}
102
f 0 (t ) = m(t − β z '(ω 0 )l ) cos(ω 0t − β z (ω 0 )l )
• Il segnale modulante m(t) viene riprodotto all’uscita della guida lunga l senza
distorsioni, con un tempo di ritardo τ = β z '(ω 0 )l e senza attenuazione in
modulo essendo la struttura dalle caratteristiche ideali. Si ha inoltre uno
sfasamento nel termine armonico.
• Il contenuto informativo, collegato a m(t), avendo percorso una distanza l,
giunge dopo un tempo τ = β z '(ω 0 )l . Può allora definirsi la velocità di gruppo,
ovvero la velocità di propagazione del segnale m(t), come segue:
l
1
ug =
=
β z '(ω 0 )l β z '(ω 0 )
o in funzione di un qualsiasi pulsazione:
d 1
ω
d βz
2
2
ug =
=
ω − ωc =
2
2
dω
dω c
ω
−
ω
c
c
c2
u g = uW =
uz
−1
−1
−1
c2 β z
=
ω
103
Microonde - Campi e.m. nelle strutture guidanti
Attenuazione
• Finora ci si è sempre riferiti a strutture guidanti dalle caratteristiche ideali:
mantello metallico perfettamente conduttore (g=∞) e dielettrico interno non
dissipativo (g=0).
• Una struttura guidante reale avrà un mantello con conducibilità finita ed un
dielettrico interno con conducibilità non nulla.
• Volendo studiare la propagazione e.m. in guide d’onda reali, sarà necessario
modificare opportunamente quelle relazioni che dipendono dalle
caratteristiche proprie della struttura.
• Ci riferiremo ad una guida d’onda a simmetria cilindrica di sezione
generica, avente il mantello metallico costituito da un buon conduttore di un
determinato spessore, ed il mezzo trasmissivo costituito da un buon
dielettrico.
104
• Distinzione tra mezzi buoni conduttori e mezzi buoni dielettrici:
Nello spazio esterno alle sorgenti: ∇ × H = jωεC E = jωε E + gE
contributo della densità di
corrente di spostamento
contributo della densità di
corrente di conduzione
Un mezzo per cui risulta ωε >> g si dice buon dielettrico: in esso prevale
largamente la corrente di spostamento su quella di conduzione.
Un mezzo per cui risulta ωε << g si dice buon conduttore: in esso la
corrente di conduzione è molto superiore a quella di spostamento.
Si vede che la proprietà di un mezzo di essere buon dielettrico o buon
conduttore dipende dalla frequenza di lavoro. Nel campo di frequenze tipiche
delle microonde, la classificazione non fornisce tuttavia mai situazioni
controverse:
- la conducibilità è in genere o altissima o bassissima nei materiali:
buoni conduttori: g ~ 107
buoni dielettrici: g ~ 10-10 - 10-17
- ε ~ 10 -17
- ωε ~ 10 8 - 10 10
~ 10-7 - 10-9
Si vede perciò che le conducibilità g sono sempre molto diverse in valore
105
dalla gamma possibile degli ωε.
• In genere nelle guide d’onda reali si ha dissipazione di potenza reale a causa
delle perdite per effetto Joule sia nel metallo che nel dielettrico.
è presente un termine reale αz nell’espressione della costante di
propagazione kz.
• Perdite dovute al dielettrico dissipativo:
Nel caso di pareti metalliche perfettamente conduttrici, se il dielettrico è non
dissipativo:
k z = ± −ω 2 µε − k t2
ed al variare di ω può risultare o puramente immaginario (propagazione) o
puramente reale (attenuazione), rimanendo così definita la frequenza di cutoff di ogni modo.
Se invece il dielettrico è dissipativo:
k z = ± −ω 2 µε c − k t2 = ± −ω 2 µε + j ωµ g − k t2 = α z + j β z
risulta complesso. Se le dissipazioni sono piccole, il caso reale non si discosta
troppo da quello ideale, a patto di trovarsi lontano dalla frequenza di cut-off:
per ω >> ωc ⇒ k z ≅ j β z
per ω << ωc ⇒ k z ≅ α z
106
Per ω ≅ ωc , k z ha una parte reale ed una immaginaria dello stesso ordine di
grandezza. Questa diversità dal caso ideale ha soprattutto carattere teorico,
infatti nella pratica, per dissipazioni piccole, quando ω ≅ ω c , k z risulta
molto piccolo in modulo e può essere considerato nullo (ancora come nel
caso ideale).
• In genere il contributo maggiore alle perdite è fornito dal fatto che la
conducibilità del mantello metallico non è infinita, giacché è possibile avere,
nella pratica, dielettrici tali da poter essere considerati con buona
approssimazione ideali.
• Perdite dovute alla conducibilità non infinita del mantello metallico:
Nell’attraversare una superficie di discontinuità, la componente tangenziale di
H subisce una variazione uguale alla densità lineare di corrente JS (corrente
superficiale) che scorre sulla superficie stessa: n 0 × ( H 2 − H 1 ) = J S
Per ciò che riguarda la propagazione in guida, la corrente superficiale scorre
sulla superficie metallica, e se il metallo ha conducibilità finita provoca una
dissipazione di energia per effetto Joule.
Ai fini della propagazione avremo un’attenuazione lungo l’asse z e quindi una
107
k
parte reale di z non nulla.
In altri termini, il campo elettrico tangenziale non è più nullo ma deve
soddisfare la condizione di Leontovic:
Eτ = Zm Hτ × n0 =
≃
µ
Hτ × n0 =
εc
jωµ
Hτ × n0 =
jωε + g
j ωµ
ωµ
Hτ × n 0 = (1 + j)
Hτ × n 0
g
2g
condizione di
Leontovič
1
∗
E’ ben noto che P = E × H , perciò, facendo uso della condizione di
2
Leontovič, si deduce che il vettore di Poynting ha una componente diretta
normalmente al conduttore, cui corrisponde un flusso di potenza attraverso il
metallo, in cui si dissipa per effetto Joule in un certo spessore della guida.
108
Consideriamo un tratto di guida lungo dz, compreso tra z e z+dz.
La potenza media che transita attraverso la sezione di superficie S, alla
generica z, è la parte reale del flusso del vettore di Poynting attraverso S:
1
∗
[W ]
P ( z ) = Re ∫ E × H ⋅ z 0dS
2
S
In prima approssimazione in z+dz si ha:
P ( z + dz ) = P ( z ) + dP ( z )
Nel caso di propagazione secondo le z positive, la potenza in z+dz risulterà, a
causa delle dissipazioni, minore di quella in z, per cui dP(z) sarà negativa.
dP(z) rappresenta, cambiata di segno, la potenza che si dissipa in un tratto
di guida lungo dz.
La potenza dissipata per unità di lunghezza è quindi:
P ( z + dz ) − P ( z )
dP ( z )
Pd ( z ) = −
=−
[W ⋅ m − 1 ]
dz
dz
Analizzeremo ora il valore di queste grandezze nell’ipotesi semplificatrice di
sola onda progressiva:
Ze ( z ) = Zh ( z ) = Z ( z ) = P2e − kz z = P2e −α z z e − j β z z
essendo genericamente presente una attenuazione αz da determinare.
109
In tale ipotesi il campo e.m. trasverso può esprimersi come segue:
E t ( q1, q2 , z ) = et ( q1, q2 ) Z ( z )
H t ( q1, q2 , z ) = ht ( q1, q2 ) Z ( z )
I campi trasversi sono legati tra loro tramite le impedenze d’onda:
jωµ
(+)
E t (TE ) =
H t (TE ) × z 0 = ZTE
H t (TE ) × z 0
kz
E t (TM ) =
kz
(+)
H t (TM ) × z 0 = ZTM
H t (TM ) × z 0
jωε c
Le precedenti relazioni possono compattarsi per un generico campo (TE o
TM) della guida d’onda:
dove con Zw si è indicata
E t = Zw H t × z 0
l’impedenza d’onda.
1
1
∗
∗
⇒ P ( z ) = Re ∫ E × H ⋅ z 0dS = Re ∫ ( E t + z 0Ez ) × ( H t + z 0H z ) ⋅ z 0dS =
2
2
S
S
(
)
1
1
∗
∗
= Re ∫ Zw ( H t + z 0 ) × H t ⋅ z 0dS = Re ∫ Zw ( H t × z 0 ) ⋅ H t × z 0 dS =
2
2
S
S
=
1
∗
Re ( Zw ) ∫ H t ⋅ H t dS
2
S
110
Analogamente si può esprimere P(z) in funzione del solo campo elettrico
trasverso:
1
∗
P ( z ) = Re (Yw∗ ) ∫ E t ⋅ E t dS
2
S
Ora esplicitiamo la dipendenza longitudinale della P(z):
P(z) =
∗
1
1
∗
∗
Re ( Zw ) ∫ H t ⋅ H t dS = Re ( Zw ) ∫ ht P2e − kz z ⋅ ht P2∗e − kz z dS =
2
2
S
S
1
∗
= Re ( Zw ) P2P2∗e −(α z + j β z )z e −(αz − j β z )z ∫ ht ⋅ ht dS =
2
S
1
∗
= Re ( Zw ) P2P2∗e −2α z z ∫ ht ⋅ ht dS
2
S
La potenza dissipata nella guida per unità di lunghezza diventa:
dP ( z )
Pd ( z ) = −
= 2α z P ( z )
dz
e quindi:
1 Pd ( z )
αz =
2 P(z)
111
La costante αz di attenuazione ha le dimensioni dell’inverso di una lunghezza.
Per la misura di αz si introducono spesso le unità logaritmiche.
Abbiamo già calcolato la forma assunta in genere dalla P(z), esprimiamo ora
anche la Pd(z) in funzione del campo e.m.
La potenza dissipata in un tratto di guida di sezione S e di lunghezza dz, è la
parte reale del flusso del vettore di Poynting attraverso la superficie laterale di
area data dalla lunghezza di s moltiplicata per dz (il cui elemento infinitesimo
è dato da dsdz):
1
∗
Pd ( z )dz = P ( z ) − P ( z + dz ) = Re ∫ E ×H ⋅ n 0dsdz
2
s
1
∗
⇒ Pd ( z ) = Re ∫ E ×H ⋅ n 0ds
2
s
Le componenti del campo e.m. capaci di fornire un contributo non nullo per il
flusso attraverso s lungo n0, sono solo quelle tangenti al mantello metallico:
1
∗
⇒ Pd ( z ) = Re ∫ E τ ×H τ ⋅ n 0ds
2
s
112
La condizione di Leontovič ci permette di esprimere la Pd(z) in funzione del
solo campo magnetico tangenziale H τ :
1
1
∗
∗
Pd ( z ) = Re ∫ E τ ×H τ ⋅ n 0ds = Re ∫ Zm (H τ × n 0 ) ×H τ ⋅ n 0ds =
2
2
s
s
=
1 ωµ
∗
H
⋅
H
τ
τ ds
∫
2 2g s
Per αz si ottiene allora:
ωµ
αz =
∗
∫ H τ ⋅ H τ ds
2g s
1 Pd ( z ) 1
=
2 P ( z ) 2 Re ( Zw ) ∫ H t ⋅ H t ∗dS
S
Per calcolare αz con l’espressione appena ricavata, è necessario conoscere il
valore effettivo del campo e.m. in ogni punto della guida reale. Questa
determinazione è generalmente assai difficile dal punto di vista analitico: a tal
fine si dovrebbero infatti modificare le condizioni al contorno già considerate
113
nel caso di struttura ideale.
L’aver espresso αz in funzione del solo campo magnetico ci permette però di
formulare la seguente ipotesi semplificante: giacchè la differenza tra campo
magnetico ideale e reale è in pratica poco apprezzabile, nel calcolo di αz e della
potenza supporremo di poter usare con buona approssimazione le espressioni
ricavabili per il campo magnetico dal caso ideale (metodo perturbativo).
Tale ipotesi riferita al campo elettrico non fornirebbe un’approssimazione del
caso reale, infatti con Eτ = 0 (situazione ideale) non si avrebbe affatto
dissipazione di potenza.
Vogliamo ora particolarizzare l’espressione di αz per onde TE, TM e TEM.
Onde TE:
ωµ
αz =
1 2g
2 ωµ
βz
∫ P2e
− kz z
∗
hτ ⋅ P2 e
− k z∗ z
∗
hτ ds
s
∫P e
− kz z
2
∗
ht ⋅ P2 e
− k z∗ z
∗
ht dS
S
∗
∗
=
∗
1 ωµ β z P2P2 e − kz z e − kz z
=
∗
2 2g ωµ P2P2∗e − kz z e − kz z
∗
∫ hτ ⋅ hτ ds
∫ hτ ⋅ hτ ds
s
s
βz
=
∗
∫ ht ⋅ ht dS 8gωµ
S
∗
∫ ht ⋅ ht dS114
S
Gli integrali dell’ultima espressione possono essere ulteriormente sviluppati.
Infatti per i modi TE si ha:
k
h t = z2 ∇ t hz
kt
Riferendoci alla componente tangenziale possiamo scrivere (Ze=Zh solo onda
progressiva):
H τ = ( H t ⋅ s 0 ) s 0 + H z z 0 = ( Z h h t ⋅ s 0 ) s 0 + Z e hz z 0 =
= Z ( z ) ( h t ⋅ s 0 ) s 0 + hz z 0
kz
k z ∂ hz
⇒ h τ = ( h t ⋅ s 0 ) s 0 + hz z 0 = 2 ∇ t hz ⋅ s 0 s 0 + hz z 0 = 2
s 0 + hz z 0
k t ∂s
kt
Allora αz diventa:
∗
k z ∂hz
k z ∂hz
s 0 + hz z 0 ⋅ 2
s 0 + hz z 0 ds
2
∫
∂s
kt ∂s
βz
s kt
αz =
∗
8gωµ
kz
kz
∫S kt 2 ∇t hz ⋅ kt 2 ∇t hz dS
115
Sviluppando i prodotti scalari:
β z 2 ∂hz 2
2
∫ k 2 ∂s + hz ds
βz
s t
=
αz =
2
2
βz
8gωµ
∇
h
∫S kt 4 t z dS
2
=
1
2 β z 2gωµ
∂hz
2
4
2
ds
+
k
h
β z ∫
t z ds
∫
∂s
s
s
∫∇h
t
z
2
dS
S
Si nota che la costante di attenuazione αz per i modi TE dipende da:
- la frequenza (anche tramite la β(ω) essendo la struttura dispersiva)
- le caratteristiche fisiche (la permeabilità µ e la conducibilità g del
metallo)
- la forma e le dimensioni della sezione della guida (mediante kt e i
domini di integrazione)
116
E’ di fondamentale importanza analizzare l’andamento di αz al variare della
frequenza.
2
∂hz
2
ds
h
z ds
∂s
4
∫
∫
kt
βz
s
s
+
= L(ω ) + C(ω )
αz =
2
2
2 2gωµ ∫ ∇t hz dS 2 β z 2gωµ ∫ ∇t hz dS
S
S
Studiamo i due addendi separatamente:
2
a) L(ω ) =
ε
2 2g
∂hz
∫ ∂s ds ω 2 − ωc2
s
∫∇h
t
z
2
ω
dS
con ω ≥ ωc
S
La dipendenza di L(ω) da ω è del tipo:
L(ω)
(ωc,0)
ω
L(ω ) = c1
ω 2 − ωc2
ω
117
∫ hz ds
2
a) C(ω ) =
kt
4
2µ 2gε
1
s
∫∇h
t
z
2
dS ω ω − ω
2
S
2
c
con ω ≥ ωc
La dipendenza di C(ω) da ω è del tipo: C(ω ) =
C(ω)
c2
ω ω 2 − ωc2
ω
(ωc,0)
L’andamento di αz è allora:
αz()
αz è molto elevata in prossimità della
frequenza di cut-off; si ha poi una banda
relativamente ampia in cui αz è più bassa
(intorno a 1.2 - 1.8 della ωc); poi αz cresce
ancora con la frequenza
le guide
d’onda si usano generalmente proprio nella
banda di minima dissipazione.
(ωc,0)
ω
118
Precisiamo meglio l’interpretazione fisica delle perdite energetiche:
αz è composto di due termini:
∂hz
- L(ω) è legato all’integrale di linea di
ovvero di ht ⋅ s 0 = htτ
∂s
(componente tangenziale del campo magnetico trasverso ht )
- C(ω) è legato a hz (componente assiale del campo magnetico).
Il campo magnetico tangenziale trasversale ( htτ s 0 su s) è collegato ad una
corrente sul conduttore diretta secondo z (corrente longitudinale).
Il campo magnetico longitudinale ( hz z 0 su s) è collegato ad una corrente sul
conduttore diretta trasversalmente, perpendicolare cioè a z0 (corrente
circonferenziale).
Le perdite energetiche possono vedersi come dissipazioni per effetto Joule,
separatamente delle correnti longitudinali e circonferenziali che scorrono sul
mantello (costituito da un buon conduttore) della guida d’onda.
119
L’esame delle attenuazioni dovute alle correnti longitudinali e circonferenziali
(espresse rispettivamente da L(ω) e C(ω)) mostra che per i modi TE:
- intorno alla frequenza di cut-off l’attenuazione è dovuta solo alle
correnti circonferenziali
- crescendo sempre più la frequenza l’attenuazione viene a dipendere
in massima parte dalle correnti longitudinali, sempre maggiori in
intensità.
Ciò è stato sfruttato per ottenere modi con attenuazione sempre minore
all’aumentare della frequenza (trasmissione in guida a grande distanza),
attraverso particolari configurazioni TE in cui non si abbiano correnti
longitudinali.
Onde TM:
Con procedimento del tutto analogo al caso delle onde TE si ottiene:
ωµ
∗ − k z∗ z
∗
∗
− kz z
P
e
h
⋅
P
e
h
ds
h
⋅
h
τ
τ
τ
τ ds
2
2
∫
∫
ωε ωµ s
1 2g s
αz =
=
∗
∗ − k z∗ z
∗
− kz z
β
β
2 z
2
2
g
h
h
⋅
P
e
h
⋅
P
e
h
dS
z
t
t
2
2
∫S t t dS120
∫
ωε S
Gli integrali dell’ultima espressione possono essere ulteriormente sviluppati.
Infatti per i modi TM si ha:
j ωε
ht =
z 0 × ∇ t ez
2
kt
j ωε
j ωε
h τ = ( h t ⋅ s 0 ) s 0 = 2 z 0 × ∇ t e z ⋅ s 0 s 0 = 2 s 0 × z 0 ⋅ ∇ t e z s 0 =
kt
kt
j ωε
j ωε ∂ e z
s0
= 2 n 0 ⋅ ∇ t e z s 0 =
2
k t ∂n
kt
Allora αz diventa:
αz =
ωε ωµ
2 β z 2g ω 2ε 2
∫
S
k
4
t
∫
s
ω 2ε 2 ∂ez
k
4
t
2
ds
∂n
( z0 × ∇t ez ) ⋅ ( z0 × ∇t ez )
∗
=
dS
2
∂ez
∂n ds
∫
ε µ ω ω s
=
2
2 2g β z
∇t ez dS
∫
S
121
Possono farsi considerazioni analoghe a quelle dei modi TE sull’espressione di
αz (limiti di validità, dipendenza dal mezzo, dalla forma, ecc.).
Per quanto riguarda la variazione di αz con la frequenza, per ω ≥ ωc , αz è del
tipo:
ω3
α z (ω ) = c 2
ω − ωc2
αz(ω)
(ωc,0) (√3ωc,0)
ω
Diversamente da quanto avviene per le onde TE, l’attenuazione per unità di
lunghezza nelle onde TM, essendo hz = 0 , è collegata esclusivamente alle
correnti longitudinali relative al campo magnetico tangenziale, che è solo
122
trasversale.
Modi TEM:
L’analisi svolta finora sulle perdite energetiche relative ai modi in guida, rimane
sostanzialmente invariata per strutture costituite da due o più conduttori.
L’espressione integrale ottenuta per l’attenuazione mantiene la sua validità,
dovendosi estendere l’integrale di linea a tutti i contorni dei conduttori.
In questo caso l’attenuazione per il modo TEM, che è il dominante, assume la
forma seguente (nel caso di onda diretta):
ωµ
αz =
1
2
2g
µ
ε
∫ P2e
− kz z
∗
hτ ⋅ P2 e
− k z∗ z
∗
s
∗
∗
∗
− kz z
− kz z
P
e
h
⋅
P
e
ht dS
t
2
∫ 2
S
∗
hτ ds
=
ωµ
8g
∫ hτ ⋅ hτ ds
s
∗
∫ ht ⋅ ht dS
S
123
ed essendo:
ε
ht = −
z0 × ∇tΦ
µ
hτ = ( h t ⋅ s 0 ) s 0 = −
ε
ε ∂Φ
×
∇
Φ
⋅
=
−
z
s
s
s0
( 0 t
0) 0
µ
µ ∂n
si ha infine per l’attenuazione:
2
∂Φ
∂n ds
∫
ωµ s
αz =
8g ∇t Φ 2 dS
∫
S
124
Microonde - Campi e.m. nelle strutture guidanti
Ortogonalità dei modi
• In una guida d’onda cilindrica ideale (struttura senza perdite: g=∞, εc = ε) a
sezione generica, ogni modo trasporta energia indipendentemente dagli altri
modi che contemporaneamente vi si propagano:
la potenza complessiva è data dalla somma delle potenze trasportate da
ciascun modo, purchè questi viaggino con diversa velocità di fase.
• Ad eccezione del caso degenere, tale proprietà viene a coincidere con quella
di ortogonalità dei modi, secondo la definizione:
∗
E
×
H
∫ ( m ) ( n ) ⋅ z0dS = 0
S
dove gli indici m e n si riferiscono a modi diversi.
125
• Consideriamo i campi e.m. relativi a due modi: E1, H1 e E2, H2, soluzioni
linearmente indipendenti delle equazioni di Maxwell.
∇ × E 1 = − jωµ H 1
∇ × H 1 = jωεC E 1
∇ × E 2 = − jωµ H 2
∇ × H 2 = jωεC E 2
• Definiamo il campo e.m. E, H somma dei precedenti modi:
E = E1 + E 2
H = H 1 + H 2
• Le equazioni di Maxwell, per la loro linearità, sono ancora soddisfatte dal
campo totale E, H.
• La potenza che attraversa la generica sezione S (reale e reattiva) è uguale al
flusso del vettore di Poynting:
P=
=
1
1
∗
∗
E
×
H
⋅
z
dS
=
E
+
E
×
H
+
H
⋅ z 0dS =
(
)
(
)
0
1
2
1
2
∫
∫
2S
2S
(
)
1
1
1
∗
∗
∗
∗
E
×
H
⋅
z
dS
+
E
×
H
⋅
z
dS
+
E
×
H
+
E
×
H
1
1
0
2
2
0
1
2
2
1 ⋅ z 0 dS
∫
∫
∫
126
2S
2S
2S
P=
(
)
1
1
1
∗
∗
∗
∗
E
×
H
⋅
z
dS
+
E
×
H
⋅
z
dS
+
E
×
H
+
E
×
H
1
1
0
2
2
0
1
2
2
1 ⋅ z 0 dS
∫
∫
∫
2S
2S
2S
potenza
trasportata dal
primo modo
potenza
trasportata dal
secondo modo
per asserire che la potenza
totale è la somma di quelle
relative ai singoli modi, è
necessario dimostrare che
questo termine è sempre nullo
• Prendiamo in considerazione l’espressione seguente:
(
∗
∗
)
∗
∗
∇ ⋅ E1 × H 2 + E 2 × H1 = ∇ ⋅ E1 × H 2 + ∇ ⋅ E 2 × H1 =
∗
∗
∗
∗
= H 2 ⋅ ∇ × E1 − E1 ⋅ ∇ × H 2 + H1 ⋅ ∇ × E 2 − E 2 ⋅ ∇ × H1 =
(
)
) + jωε ( E
(
)
= H 2 ⋅ ( − jωµ H 1 ) − E 1 ⋅ − jωε E 2 + H 1 ⋅ ( − jωµ H 2 ) − E 2 ⋅ − jωε E 1 =
∗
(
∗
∗
= − jωµ H 1 ⋅ H 2 + H 1 ⋅ H 2
∗
∗
∗
∗
1 ⋅ E 2 + E1 ⋅ E 2
)
∗
127
(
∗
∗
)
(
∗
∗
)
(
∗
∗
∇ ⋅ E 1 × H 2 + E 2 × H 1 = − jωµ H 1 ⋅ H 2 + H 1 ⋅ H 2 + jωε E 1 ⋅ E 2 + E 1 ⋅ E 2
I termini posti fra parentesi nel secondo membro, sono quantità reali (somma
di due numeri complessi coniugati), per cui la divergenza dell’espressione
considerata risulta sempre immaginaria o nulla.
• Consideriamo ora una parte di guida d’onda di volume τ avente superficie
totale Stot=S1+S2+ S0, dove S1 e S2 indicano rispettivamente le superfici delle
sezioni in corrispondenza delle quote z=z1 e z=z2, mentre S0 è la superficie
del mantello metallico delimitato dalle stesse S1 e S2.
n0
S0
S1
( z = z1 )
S2
n 0 ( z = z2 )
z0
n0
n 0 = −z 0 su S1
n 0 = z 0 su S2
su S0
n0 = n
128
)
(
∗
)
∗
∫ ∇ ⋅ E 1 × H 2 + E 2 × H 1 dτ =
τ
(
∗
∗
)
∫(
∗
Stot
= − ∫ E 1 × H 2 + E 2 × H 1 ⋅ z 0dS +
S1
(
∗
∗
)
∗
)
E 1 × H 2 + E 2 × H 1 ⋅ n 0dS =
∫(
∗
∗
)
E 1 × H 2 + E 2 × H 1 ⋅ z 0dS +
S2
+ ∫ E 1 × H 2 + E 2 × H 1 ⋅ ndS
S0
Poiché per ipotesi il conduttore metallico è perfetto, il flusso attraverso la
superficie laterale S0 è nullo, infatti su una PEP: E τ = 0, H n = 0 ⇒ E × H ∗ ⊥ n
Allora per le osservazioni svolte in precedenza si deve avere che la quantità:
(
∗
∗
)
− ∫ E 1 × H 2 + E 2 × H 1 ⋅ z 0dS +
S1
∫(
S2
∗
∗
)
E 1 × H 2 + E 2 × H 1 ⋅ z 0dS
(
∗
∗
deve essere immaginaria o nulla (essendo l’integrale di ∇ ⋅ E 1 × H 2 + E 2 × H 1
che abbiamo già detto essere una quantità immaginaria o nulla, esteso ad un
dominio reale).
129
)
• Riferiamoci al caso ideale di propagazione ideale, quindiω > ωc ⇒ k z = j β z
Nell’ipotesi che i due modi si propaghino nello stesso verso, ad esempio + z0 ,
con diverse velocità di fase ( β z1 ≠ β z 2 ), si ha:
E 1 = E t 1 + Ez1 z 0 = P2 et 1e − j β z1z + P2ez1e − j β z1z z 0
− jβ z
− jβ z
H 1 = H t 1 + H z1 z 0 = P2 ht 1e z1 + P2hz1e z1 z 0
E 2 = E t 2 + Ez 2 z 0 = P2I et 2e − j β z 2 z + P2I ez 2e − j β z 2z z 0
I
I
− j βz 2z
− j β2 z
H
=
H
+
H
z
=
P
h
e
+
P
z0
2
t2
t2
z2 0
2
2 hz 2e
(
∗
∗
)
⇒ − ∫ E 1 × H 2 + E 2 × H 1 ⋅ z 0dS +
S1
∫ (E × H
1
∗
2
S2
∗
)
+ E 2 × H 1 ⋅ z 0dS =
∗
∗
= − ∫ ( E t 1 + Ez1 z 0 ) × ( H t 2 + H z 2 z 0 ) + ( E t 2 + Ez 2 z 0 ) × ( H t 1 + H z1 z 0 ) ⋅ z 0dS +
S1
∗
∗
+ ∫ ( E t 1 + Ez1 z 0 ) × ( H t 2 + H z 2 z 0 ) + ( E t 2 + Ez 2 z 0 ) × ( H t 1 + H z1 z 0 ) ⋅ z 0dS =
S2
I∗
∗
∗
∗
= − ∫ P2P2 e j ( β z 2 − β z1 ) z1 e t 1 × ht 2 ⋅ z 0dS − ∫ P2 P2 e − j ( β z 2 − β z1 )z1 et 2 × ht 1 ⋅ z 0dS +
I
S1
S1
I∗
∗
∗
∗
+ ∫ P2P2 e j ( β z 2 − β z1 ) z2 et 1 × ht 2 ⋅ z 0dS + ∫ P2 P2 e − j ( β z 2 − β z1 ) z2 et 2 × ht 1 ⋅ z 0dS
S1
S2
I
130
Poiché le componenti trasversali et1, ht1, et2, ht2 non dipendono da z, gli
integrali
∗
∫ et 1 × ht 2 ⋅ z0dS
∗
∫ et 2 × ht 1 ⋅ z0dS
e
S
S
assumono sempre gli stessi valori in corrispondenza a qualunque sezione
trasversa; in particolare poniamo:
∗
∗
∫ et 1 × ht 2 ⋅ z0dS = Ι12
∫ et 2 × ht 1 ⋅ z0dS = Ι 21
S
S
Indicando poi genericamente:
ϕ1 = ( β z 2 − β z1 ) z1
ϕ 2 = ( β z 2 − β z1 ) z2
si può scrivere:
I∗
∗
∗
∗
− ∫ P2P2 e j ( β z 2 − β z1 ) z1 et 1 × ht 2 ⋅ z 0dS − ∫ P2 P2 e − j ( β z 2 − β z1 )z1 et 2 × ht 1 ⋅ z 0dS +
S1
I
S1
I∗
∗
∗
∗
+ ∫ P2P2 e j ( β z 2 − β z1 )z2 et 1 × ht 2 ⋅ z 0dS + ∫ P2 P2 e − j ( β z 2 − β z1 )z2 et 2 × ht 1 ⋅ z 0dS =
S1
I
S2
I∗
= −Ι12P2P2 e
(
jϕ1
(
− Ι 21 P2P2
)
)
I∗ ∗
e
− jϕ1
(
I∗
+ Ι12P2P2 e
I∗
I∗
= Ι12 P2P2 e jϕ2 − e jϕ1 + Ι 21 P2P2
) (e
∗
− jϕ2
jϕ2
(
+ Ι 21 P2P2
)
− e − jϕ1
)
I∗ ∗
e − jϕ2 =
131
Le quantità tra parentesi quadre sono complesse coniugate, per cui possiamo
scrivere:
(
)
(
I∗
I∗
Ι12 P2P2 e jϕ2 − e jϕ1 + Ι 21 P2P2
) (e
∗
− jϕ2
)
− e − jϕ1 =
= Ι12 ρ e jϑ + Ι 21ρ e − jϑ
In base a quanto detto questa espressione deve risultare immaginaria o nulla.
Ricordiamo che le soluzioni trasverse et1, ht1, et2, ht2 dei modi presi in esame
sono determinate a meno di una costante moltiplicativa (soddisfacendo
anch’esse all’equazione di Helmholtz ∇ t2 [ ] = kt2 [ ] , con kt2 reale nel
nostro caso ideale).
Perciò tali componenti trasverse possono essere considerate reali.
Questo implica fra l’altro che gli integrali indicati con I12 e I21 sono reali.
⇒ Re Ι12 ρ e jϑ + Ι 21ρ e − jϑ = Re Ι12 ρ ( cos ϑ + j sinϑ ) + Ι 21ρ ( cos ϑ − j sinϑ ) =
= ( Ι12 + Ι 21 ) ρ cos ϑ = 0
Dovendo questa relazione essere soddisfatta per qualsiasi valore di z1, z2, βz1,
βz2 (con β z1 ≠ β z 2 ), P2 , P2’ deve essere: Ι12 = −Ι 21
132
• Si può vedere che alle stesse conclusioni si giunge prendendo in esame due
modi entrambi propagantesi lungo −z 0.
• Ripetiamo invece il procedimento nel caso in cui i due modi si propagano in
versi opposti: supponiamo ad esempio che il primo si propaghi nel verso di + z 0
mentre il secondo in quello di −z 0 (alle stesse conclusioni si giunge con la
scelta opposta).
Innanzitutto si ha:
E t 2 = P1et 2e j β z 2z
E t 1 = P2 et 1e − j β z1z
jβ z
− j β z 1z
H t 2 = −P1 ht 2e z 2
H t 1 = P2 ht 1e
Per cui si ottiene:
(
∗
∗
)
− ∫ E 1 × H 2 + E 2 × H 1 ⋅ z 0dS +
S1
∗
∫ (E × H
1
∗
2
S2
∗
∗
)
+ E 2 × H 1 ⋅ z 0dS =
∗
∗
∗
∗
= ∫ P1 P2e − j ( β z1 + β z 2 ) z1 et 1 × ht 2 ⋅ z 0dS − ∫ P1P2 e j ( β z1 + β z 2 ) z1 et 2 × ht 1 ⋅ z 0dS +
S1
S1
∗
∗
− ∫ P1 P2e − j ( β z1 + β z 2 ) z2 e t 1 × ht 2 ⋅ z 0dS + ∫ P1P2 e j ( β z1 + β z 2 )z2 et 2 × ht 1 ⋅ z 0dS
S1
S2
133
Con le posizioni:
∗
∗
∫ et 1 × ht 2 ⋅ z0dS = Ι12
∫ et 2 × ht1 ⋅ z0dS = Ι 21
S
S
( β z1 + β z 2 ) z1 = Ψ1
avremo:
∗
12 1 2
Ι P Pe
− j Ψ1
∗
1 2
(
(
= Ι12 P P e
)e
∗
∗
1 2
− Ι 21 P P
− j Ψ1
( β z1 + β z 2 ) z2 = Ψ 2
−e
− j Ψ2
)
j Ψ1
∗
12 1 2
−Ι P Pe
(
− Ι 21 P1∗P2
− j Ψ2
) (e
∗
(
+ Ι 21 P P
j Ψ1
)e
∗
∗
1 2
j Ψ2
=
)
− e j Ψ2 =
= Ι12 ρ e jϑ − Ι 21ρ e − jϑ
Tale quantità deve risultare immaginaria o nulla, perciò:
Re Ι12 ρ e jϑ − Ι 21ρ e − jϑ = ( Ι12 − Ι 21 ) ρ cos ϑ = 0
⇒ Ι12 = Ι 21
• Le condizioni Ι12 = −Ι 21e Ι12 = Ι 21 devono essere verificate
contemporaneamente, riferendoci a campi e.m. composti generalmente sia da
un’onda diretta che da un’onda riflessa, quindi:
∗
∗
∫ et 1 × ht 2 ⋅ z0dS =
∫ et 2 × ht 1 ⋅ z0dS = 0
S
S
134
• La fondamentale relazione trovata:
∗
∗
∫ et 1 × ht 2 ⋅ z0dS =
∫ et 2 × ht 1 ⋅ z0dS = 0
S
S
dimostra che i modi sono tra loro ortogonali, ovvero la potenza trasportata
complessivamente attraverso una generica S è la somma delle singole potenze
dei modi.
• Consideriamo ora il caso in cui β z1 = β z 2 : i modi aventi la stessa costante
di propagazione (e velocità di fase) vengono detti degeneri.
Per i modi degeneri in genere non valgono più le conclusioni
precedentemente ricavate ( Ι12 = Ι 21 = 0 ).
Consideriamo infatti due modi degeneri propagantesi nello stesso verso, ad
esempio + z 0 (ma le osservazioni che faremo possono ripetersi perfettamente
con la scelta −z 0 ).
E t 1 = P2 et 1e − j β z z
− jβ z
H t 1 = P2 ht 1e z
E t 2 = P2I et 2e − j β z z
I
− j βz z
=
H
P
t 2
2 h t 2e
135
Sviluppando la solita:
(
∗
∗
)
− ∫ E 1 × H 2 + E 2 × H 1 ⋅ z 0dS +
S1
∫(
∗
∗
)
E 1 × H 2 + E 2 × H 1 ⋅ z 0dS
S2
si ottiene una relazione che risulta indipendente da z , pertanto gli integrali
estesi a S1 e S2 sono uguali.
Potrà allora essere Ι12 ≠ −Ι 21 , cioè non è necessariamente vero che:
∗
∗
∫ et 1 × ht 2 ⋅ z0dS = − ∫ et 2 × ht 1 ⋅ z0dS
S
S
Nel caso di due modi propagantesi in versi opposti con β z1 = β z 2 si ha:
E t 2 = P1et 2e j β z z
jβ z
H t 2 = −P1 ht 2e z
E t 1 = P2 et 1e − j β z z
− jβ z
H t 1 = P2 ht 1e z
In questo caso sviluppando la:
(
∗
∗
)
− ∫ E 1 × H 2 + E 2 × H 1 ⋅ z 0dS +
S1
∫(
∗
∗
)
E 1 × H 2 + E 2 × H 1 ⋅ z 0dS
S2
i termini integrali dipendono ancora da z (secondo fattori del tipo e ± j 2 β z z ) e
∗
∗
quindi dovrà ancora essere soddisfatta la ∫ et 1 × ht 2 ⋅ z 0dS = ∫ et 2 × ht 1136⋅ z 0dS
S
S
Per le osservazioni fatte:
validità della
ma non della
∗
∗
∫ et 1 × ht 2 ⋅ z0dS =
∫ et 2 × ht1 ⋅ z0dS
S
S
∗
∗
∫ et 1 × ht 2 ⋅ z0dS = − ∫ et 2 × ht 1 ⋅ z0dS
S
S
si deduce che in genere i modi degeneri non sono ortogonali, per cui per essi
non si può affermare che trasportino potenza separatamente.
• I ragionamenti relativi al caso ideale di propagazione contemporanea di più
modi hanno riscontri pratici di notevole interesse per quanto riguarda le
dissipazioni energetiche.
Nel caso di propagazione in guida d’onda reale (con piccole perdite dovute
alla conducibilità non infinita del mantello metallico) è stata precedentemente
calcolata l’espressione dell’attenuazione per un certo modo (tramite il metodo
di perturbazione).
137
Qualora i termini di potenza misti
∗
P12 = ∫ E 1 × H 2 ⋅ z 0dS
S1
∗
P21 = ∫ E 2 × H 1 ⋅ z 0dS
S1
siano nulli (cosa che avviene sempre nei modi ortogonali nel caso ideale), il
metodo di perturbazione risulta ancora valido e la potenza dissipata
globalmente è data dalla somma delle potenze dissipate dai singoli modi.
Se invece i termini di potenza misti non sono nulli, i modi si dicono
accoppiati nelle perdite.
L’accoppiamento dei modi è in genere di scarso rilievo ai fini delle
dissipazioni tranne che per i modi degeneri (che comunque non sono affatto
sempre accoppiati).
Si può vedere che, con riferimento alle correnti J1 e J2 che scorrono per i due
modi sul mantello conduttore di impedenza Zm, non si ha accoppiamento solo
se le correnti in ogni punto del contorno risultano tra loro ortogonali.
138
Infine è interessante evidenziare che per i modi degeneri per cui i termini di
potenza misti non sono nulli, è possibile ricavare una loro opportuna
combinazione lineare tale che si abbiano due nuovi modi con termini di
potenza misti nulli e che risultino non più accoppiati (così l’attenuazione
totale può dedursi dalla somma delle singole).
139
Microonde - Campi e.m. nelle strutture guidanti
Guida d’onda rettangolare
• Finora abbiamo analizzato le principali proprietà dei campi e.m. che si
propagano in strutture guidanti a sezione generica formata da un solo
conduttore.
• Ora studieremo i particolari modi TE e TM all’interno delle guide d’onda a
sezione rettangolare.
• Nel caso di guida d’onda a sezione rettangolare, è conveniente riferirsi ad un
sistema di coordinate cartesiane ortonormale destro:
q1=x, q2=y, z=z
y
(0,b)
a e b sono le dimensioni
della sezione della guida,
riferite alle pareti interne.
z
(0,0)
(a,0)
x
140
Onde TE:
• Le componenti trasverse del campo e.m. TE possono essere dedotte dalla
risoluzione dell’equazione differenziale scalare (Helmholtz):
∇ t2 hz = k t2 hz
• Poiché ci riferiremo a guide ideali (g=∞), h deve soddisfare la condizione:
∂ hz
sul contorno s ∈ PEP
=0
∂n
• L’espressione generale del Laplaciano in coordinate curvilee ortogonali è:
∇
2
[
1
]=
h1h2 h3
∂ h 2 h3 ∂
∂ h3 h1 ∂
+
[
]
∂
q
h
∂
q
∂
q
1
2 h2 ∂ q 2
1 1
[
∂ h1h2 ∂
] +
∂
q
3 h3 ∂ q 3
• Nel caso delle coordinate cartesiane:
q1 = x
q3 = z
q2 = y
h1 = 1
h2 = 1
h3 = 1
L’equazione di Helmholtz diviene:
∂ 2 hz ( x , y ) ∂ 2 hz ( x , y )
2
+
=
k
t hz ( x , y )
2
2
∂x
∂y
141
[
]
e la condizione al contorno diviene:
per
x = 0, x = a
0≤y ≤b
∂ hz ( x , y )
=0
∂x
∂ hz ( x , y )
0≤x≤a
=0
per
∂y
y = 0, y = b
• Si può tentare di risolvere l’equazione delle onde col metodo di separazione
delle variabili, esprimendo hz ( x , y ) come prodotto di due funzioni X e Y,
rispettivamente dipendenti della sola x e della sola y:
hz ( x , y ) = X ( x )Y ( y )
Si può dimostrare che in tal caso le soluzioni ottenibili con questo metodo
forniscono uno spettro completo: tale scelta non è quindi limitativa, in quanto
un’opportuna combinazione lineare (eventualmente estesa ad infiniti termini)
di queste soluzioni è in grado di rappresentare ogni soluzione dell’equazione
di Helmholtz.
In generale si può pensare di applicare con successo la separazione delle
variabili qualora la struttura presenti determinate simmetrie, tali da permettere
142
la corrispondente scomposizione delle condizioni al contorno.
Si ottiene:
∂2 X (x)
∂ 2Y ( y )
2
Y (y )
+
X
(
x
)
=
k
X ( x )Y ( y )
t
2
2
∂x
∂y
con le condizioni:
per
x = 0, x = a
0≤y ≤b
0≤x≤a
per
y = 0, y = b
∂X ( x )
=0
Y (y )
∂x
X (x)
∂Y ( y )
=0
∂y
∂y
Poiché la soluzione hz ( x , y ) = 0 è priva di interesse (implica un campo e.m.
nullo) possiamo dividere per X(x)Y(y) ambo i membri dell’equazione delle
onde e semplificare le corrispondenti condizioni al contorno, supponendo
X ( x) ≠ 0 e Y ( y ) ≠ 0 :
1 ∂2 X (x)
1 ∂ 2Y ( y )
2
+
=
k
t
X ( x ) ∂x 2
Y ( y ) ∂y 2
x = 0, x = a
per
0≤y ≤b
∂X ( x )
=0
∂x
0≤x≤a
per
y = 0, y = b
∂Y ( y )
143 = 0
∂y
Posta nella forma precedente, l’equazione di Helmholtz esprime
l’uguaglianza fra la somma dei due termini:
1 ∂2 X (x)
X ( x ) ∂x 2
1 ∂ 2Y ( y )
Y ( y ) ∂y 2
funzioni rispettivamente della sola x e della sola y, e la costante reale:
k t2
Affinchè ciò sia verificato per ogni x,y ∈ S, è necessario che i due addendi
siano separatamente costanti:
1 ∂2 X (x)
2
=
−
k
x
X ( x ) ∂x 2
1 ∂ 2Y ( y )
2
=
−
k
y
Y ( y ) ∂y 2
dove k x2 e k y2 sono quantità reali non negative che devono soddisfare la
relazione di separabilità:
− k x2 − k y2 = k t2
144
• Le equazioni ottenute sono omogenee, del secondo ordine, lineari, e sono
note come equazioni dei moti armonici:
∂2 X (x)
2
+
k
x X (x) = 0
2
∂x
2
∂ Y ( y ) + k 2Y ( y ) = 0
y
∂ y 2
I loro integrali generali sono del tipo:
X ( x ) = C1 sin( k x x ) + C 2 cos( k x x )
per
kx ≠ 0
Y ( y ) = D1 sin( k y y ) + D 2 cos( k y y )
per
ky ≠ 0
X ( x ) = C1 x + C 2
per
kx = 0
Y ( y ) = D1 x + D 2
per
ky = 0
145
• Imponiamo le condizioni al contorno:
Supponendo dapprima k x ≠ 0 si ha per X(x):
dX ( x )
= k x (C1 cos( k x x ) − C 2 sin( k x x ) )
dx
dX ( x )
⇒
= k x C1 = 0 ⇒ C1 = 0
dx x = 0
e:
dX ( x )
dx
= k x C 2 sin k x a = 0
x =a
Dovendo essere C 2 ≠ 0 (altrimenti si avrebbe X(x)=0), la precedente
espressione risulta verificata solo se:
sin k x a = 0
che implica per k x :
k x a = mπ ⇒ k x =
mπ
a
con m=1,2,...
146
Supponiamo ora k x = 0 :
dX ( x )
= C1
dx
dX ( x )
⇒
= C1 = 0 ⇒ C1 = 0
dx x = 0,a
Analogo procedimento può ripetersi per le condizioni al contorno per la Y(y):
per k y ≠ 0 si ha:
dY ( y )
= k y ( D1 cos( k y y ) − D 2 sin( k y y ) )
dy
dY ( y )
dy
dY ( y )
dy
⇒ ky =
= k x D1 = 0 ⇒ D1 = 0
y =0
= − k y D 2 sin k y b = 0 ⇒ k y b = nπ
y =b
nπ
b
con
n = 1, 2,...
147
per k y = 0 si ha:
dY ( y )
= D1
dy
dY ( y )
dy
= 0 ⇒ D1 = 0
y = 0,b
In definitiva le condizioni al contorno per i campi TE implicano:
C1 = 0
D1 = 0
mπ
nπ
kx =
m = 0,1, 2,...;
ky =
n = 0,1, 2,...
a
b
dove sono stati considerati anche i valori nulli degli indici m e n, compattando
così i casi:
k x ≠ 0, k y = 0 e k x = 0, k y ≠ 0
• Gli autovalori dei modi TE sono determinati da:
2
2
m
π
n
π
2
2
2
k t = − k x − k y = −
+
b
a
m = 0,1, 2
con
n = 0,1, 2 148
• L’espressione dell’autofunzione è:
m = 0,1, 2
con
n = 0,1, 2
mπ
nπ
x cos
y
hz ( x , y ) = X ( x )Y ( y ) = C 2 D 2 cos
a
b
La costante moltiplicativa C 2 D 2 influisce solo sull’ampiezza del campo e.m. e
risulta determinata dalle condizioni iniziali di eccitazione (per es. potenza
immessa, ecc.).
• Ricaviamo le componenti trasverse del generico campo TE:
kz
k z ∂hz
∂hz
∇
h
=
x
+
y
t z
=
2
2 0
0
kt
kt
∂x
∂y
k
mπ
k
nπ
mπ
nπ
mπ nπ
sin
cos
= − z2 C2D2
x cos
y x 0 − z2 C2D2
x sin
y y0
kt
a
kt
b
a
b
a b
ht ( x, y ) = hx x 0 + hy y 0 =
x0
et ( x, y ) = ex x 0 + ey y 0 =
jωµ
jωµ
ht × z 0 =
hx
kz
kz
0
y0
z0
hy
0 =
0
1
jωµ
jωµ
hy x 0 −
hx y 0
kz
kz
149
• Riassumendo, in una guida d’onda con pareti perfettamente conduttrici a
sezione rettangolare di dimensioni a,b le componenti trasversali elettriche e
magnetiche per un’onda TE sono:
jωµ nπ
mπ nπ
ex ( x, y ) = −C2D2 2
cos
x sin
y
kt b
a b
jωµ mπ
mπ
nπ
ey ( x, y ) = C2D2 2
sin
x cos
y
kt a
a
b
ez ( x, y ) = 0
k z mπ
mπ
nπ
hx ( x, y ) = −C2D2 2
sin
x cos
y
kt a
a
b
k nπ
mπ nπ
cos
hy ( x, y ) = −C2D2 z2
x sin
y
kt b
a b
mπ
nπ
hz ( x, y ) = C2D2 cos
x cos
y
a
b
150
• La legge di dipendenza da z è del tipo:
Ze ( z ) = P1e kz z + P2e − kz z
Zh ( z ) = −P1e kz z + P2e − kz z
• Si ha quindi la completa conoscenza del campo TE:
E = E t = et ( x, y )Ze ( z ) = ex ( x, y )Ze ( z )x 0 + ey ( x, y )Ze ( z )y 0
H = H t + H z z 0 = ht ( x, y )Zh ( z ) + hz ( x, y )Ze ( z )z 0 =
= hx ( x, y )Zh ( z )x 0 + hy ( x, y )Zh ( z )y 0 + hz ( x, y )Ze ( z )z 0
• La costante di propagazione kz risulta determinata per ogni modo dalla
relazione:
mπ nπ
k z = k 2 − kt2 = −ω 2 µε c +
+
a b
2
2
151
• Considerando il dielettrico non dissipativo (come generalmente avviene in
pratica) è possibile individuare la frequenza di taglio di un modo
tramite la:
2
2
m
π
n
π
π
m2 n2
2
2
ω c µε =
+
= −k t
⇒ ωc =
+ 2
2
b
µε a
a b
ωc c m n
=
=
+ 2
2
2π 2 a
b
2
⇒ fc [ m,n ]
2
È usuale rappresentare tra parentesi quadre
gli indici relativi alle grandezze delle onde
TE, tra parentesi tonde quelli delle onde
TM: notazione di Šelkunov
Si può osservare che la frequenza di cut-off di ogni modo dipende
esclusivamente dalla struttura, tramite ε e µ del mezzo e le dimensioni a e b
della sezione.
Poiché per convenzione si suppone che il lato di dimensione a (sempre posto
sull’asse x) sia maggiore di quello di dimensione b (giacente su y), il minimo
valore che la frequenza di taglio può assumere al variare degli indici m e n si
ottiene per m=1 e n=0 (ricordiamo che non si può avere contemporaneamente
m=0,n=0):
c
fc [1,0] =
152
2a
Onde TM:
• Il procedimento che consente di esplicitare l’intero campo TM in una guida
rettangolare è analogo a quello seguito per le onde TE.
• Il campo e.m. trasverso può essere ricavato risolvendo l’equazione di
Helmholtz:
∇t2ez = kt2ez
dove, nel caso di guida con pareti perfettamente conduttrici, deve essere
verificata la condizione:
ez = 0
sul contorno s
• Nel sistema di riferimento adottato possiamo scrivere:
∂ 2ez ( x, y ) ∂ 2ez ( x, y )
2
+
=
k
t ez ( x, y )
2
2
∂x
∂y
• Si possono separare le variabili ponendo: ez ( x, y ) = X ( x )Y ( y )
2
2
∂2 X
∂ 2Y
1
∂
X
1
∂
Y
2
2
⇒Y
+
X
=
k
XY
⇒
+
=
k
t
t
∂x 2
∂y 2
X ∂x 2 Y ∂y 2
153
1
X
⇒
1
Y
∂2 X
2
=
−
k
x
∂x 2
∂ 2Y
2
=
−
k
y
∂y 2
con
−k x2 − k y2 = kt2
• La condizione ez = 0 sul contorno s implica che sia:
x = 0, x = a;
per
X (x) = 0
0 ≤ y ≤ b
y = 0, y = b;
Y ( y ) = 0
per
0 ≤ x ≤ a
• Le soluzioni delle equazioni differenziali dei moti armonici per X(x) e Y(y)
sono del tipo:
X ( x ) = C1 sin k x x + C2 cos k x x
Y ( y ) = D1 sin k y y + D2 cos k y y
per
kx ≠ 0
per
ky ≠ 0
X ( x ) = C1x + C2
Y ( y ) = D1y + D2
per
kx = 0
per
ky = 0
154
• Imponiamo le condizioni al contorno per la X(x):
X (0) = C2 = 0 ⇒ C2 = 0
⇒ X ( x ) = 0 ⇒ ez = 0
X (a ) = C1a = 0 ⇒ C1 = 0
e quindi supporremo k x ≠ 0 ;
per
kx = 0
X (0) = C2 = 0 ⇒ C2 = 0
per k x ≠ 0
X (a ) = C1 sin k x a = 0 ⇒ sin k x a = 0 ⇒ k x a = mπ
mπ
⇒ kx =
, m = 1,2,...
a
• Analogamente per la Y(y):
Y (0) = D2 = 0 ⇒ D2 = 0
⇒ Y ( y ) = 0 ⇒ ez = 0
Y (b ) = D1b = 0 ⇒ D1 = 0
e quindi supporremo k y ≠ 0 ;
per
per
ky = 0
ky ≠ 0
Y (0) = D2 = 0 ⇒ D2 = 0
Y (b ) = D1 sin k y b = 0 ⇒ sin k y b = 0 ⇒ k x b = nπ
⇒ ky =
nπ
, n = 1,2,...
b
155
• Per quanto visto gli autovalori per i modi TM sono dati da:
2
2
mπ nπ
2
2
2
k t = −k x − k y = −
+
a
b
e l’autofunzione ez ( x, y ) assume la forma:
m = 1,2,...
n = 1,2,...
mπ nπ
ez ( x, y ) = X ( x )Y ( y ) = C1D1 sin
x sin
y
a b
m = 1,2,...
n = 1,2,...
Si nota che l’espressione che fornisce gli autovalori per i modi TE e TM è la
stessa, però per le onde TM gli indici m e n non possono mai assumere il
valore nullo.
• Ricaviamo le componenti del generico campo TM(m.n):
kz
k z ∂ez
∂ez
et ( x, y ) = ex x 0 + ey y 0 = 2 ∇t ez = 2 x 0
+ y0
=
kt
kt
∂x
∂y
k
mπ
k
nπ
mπ nπ
mπ
nπ
= z2 C1D1
cos
x sin
y x 0 + z2 C1D1
sin
x cos
y y0
156
kt
a
kt
b
a b
a
b
x0
ht ( x, y ) = hx x 0 + hy y 0 =
=−
jωε c
jωε c
z 0 × et =
0
kz
kz
ex
y0
z0
0
1 =
ey
0
jωε c
jωε c
ey x 0 +
ex y 0
kz
kz
k z mπ
mπ nπ
ex ( x, y ) = C1D1 2
x sin
y
cos
kt a
a b
k nπ
mπ
nπ
ey ( x, y ) = C1D1 z2
sin
x cos
y
kt b
a
b
mπ nπ
ez ( x, y ) = C1D1 sin
x sin
y
a b
jωε nπ
mπ
nπ
sin
hx ( x, y ) = −C1D1 2 c
x cos
y
kt b
a
b
jωε mπ
mπ nπ
hy ( x, y ) = C1D1 2 c
cos
x sin
y
kt
a
a b
hz ( x, y ) = 0
157
La legge di dipendenza da z è del tipo:
Ze ( z ) = P1e kz z + P2e − kz z
Zh ( z ) = −P1e kz z + P2e − kz z
Si ha quindi la completa conoscenza del campo TM:
E = E t + Ez z 0 = et ( x, y )Ze ( z ) + ez ( x, y )Zh ( z )z 0 =
= ex ( x, y )Ze ( z )x 0 + ey ( x, y )Ze ( z )y 0 + ez ( x, y )Zh ( z )z 0
H = H t = ht ( x, y )Zh ( z ) = hx ( x, y )Zh ( z )x 0 + hy ( x, y )Zh ( z )y 0
• La costante di propagazione kz risulta determinata per ogni modo dalla
relazione:
mπ nπ
k z = k 2 − kt2 = −ω 2 µε c +
+
a b
2
2
158
• Considerando il dielettrico non dissipativo (come generalmente avviene in
pratica) è possibile individuare la frequenza di taglio di un modo TM
tramite la:
2
2
m
π
n
π
π
m2 n2
2
2
ω c µε =
+
= −k t
⇒ ωc =
+ 2
2
b
µε a
a b
⇒ fc ( m,n )
ωc c m2 n 2
=
=
+ 2
2
2π 2 a
b
Il minimo valore che la frequenza di taglio può assumere al variare degli
indici m e n si ottiene per m=1 e n=1 (essendo sempre m ≠ 0 , n ≠ 0 ):
fc (1,1) =
c
a2 + b2
2ab
159
Modo dominante e modi degeneri
• In una guida d’onda a sezione rettangolare di dimensioni a,b (a>b), il modo
dominante risulta essere il TE[1,0], cui corrispondono la frequenza di taglio:
c
fc [1,0] =
2a
e l’autovalore:
π2
2
kt = − 2
a
Particolarizzando le espressioni trovate per i campi TE, le componenti del
modo dominante divengono (m=1, n=0):
hx ( x, y ) = C2D2
e x ( x, y ) = 0
ey ( x, y ) = −C2D2
ez ( x, y ) = 0
jωµ a
π
π
sin
a
x
j ω 2 µε a 2 − π 2
π
π
sin
a
hy ( x, y ) = 0
π
hz ( x, y ) = C2D2 cos
a
x
160
x
• Il campo elettrico del modo TE[1,0] è polarizzato lungo la direzione di y0. La
legge di variazione con le coordinate nel piano trasverso dipende solo da x.
• L’andamento con x delle componenti non nulle del TE[1,0] è rappresentata in
figura:
Hz z0
y
Ht
x
b
z
E
a
161
• Linee di forza del TE[1,0]:
162
163
• Come detto in precedenza, nella maggior parte dei casi si lavora in una
banda di frequenza in cui si possa propagare un solo modo (il dominante)
mentre gli altri si attenuano più o meno rapidamente trovandosi al di sotto
della loro frequenza di taglio.
Esempio:
guida rettangolare dalle dimensioni standard: a=22.86mm , b=10.16mm
TE[3,0] TE-TM[3,1] TE-TM[4,1]
TE[0,1]
0
1
TE[1,0]
TE[2,0]
Ordine
Modi
1
2
3
4
5
6
7
8
9
10
11
TE 10
TE 20
TE 01
TE-TM11
TE 30
TE-TM 21
TE-TM 31
TE 40
TE 02
TE-TM 41
TE-TM 12
TE-TM[1,1] TE-TM[2,1] TE[4,0] TE[0,2]
Frequenze critiche Lunghezze d’onda Autovalori
2
-2
fc [GHz]
critiche λc [cm] -|kt| (cm )
6.557
4.572
1.89
13.114
2.286
7.56
14.754
2.032
9.56
16.145
1.857
11.45
19.671
1.524
17.01
19.739
1.519
17.12
24.589
1.219
26.57
26.229
1.143
30.24
29.507
1.016
38.24
30.093
0.996
39.80
30.227
0.992
40.13
164
fc
[GHz]
Con la scelta fatta di a e b il range di frequenza unimodale è quello compreso
tra la fc del TE[1,0] e la fc del primo modo di ordine superiore (il TE[2,0]):
6.557 - 13.114 GHz, cui corrispondono lunghezze d’onda comprese tra a e
2a: 2.286 - 4.572cm.
La guida si comporta come un filtro passa-alto: le onde e.m. aventi una
lunghezza d’onda superiore al doppio della dimensione trasversale maggiore
non si possono propagare.
In pratica si deve tenere però conto delle attenuazioni di potenza, così ad
esempio il range unimodale effettivamente utilizzato risulta essere quello
compreso tra circa 1.2 fc[1,0] e 1.9 fc[1,0].
Si noti che considerando m e n non nulli, per una scelta generica della coppia
degli indici (m,n), gli autovalori per i corrispondenti modi TE[m,n] e TM(m,n)
sono gli stessi
tali modi hanno la stessa frequenza di taglio, la stessa
costante di propagazione, ecc., cioè sono modi degeneri.
L’eccitazione di modi degeneri porta in genere, come già detto, a sgradevoli
conseguenze per la dissipazione energetica (accoppiamento nelle perdite).
Ulteriori casi di modi degeneri si avrebbero considerando guide d’onda in cui
la dimensione del lato maggiore risulta un multiplo intero di quella del165
lato
minore: a=kb.
Ad esempio, se a=2b (k=2), si vede dall’espressione di kt2 che oltre ai TE[m,n]
e TM(m,n), si avrebbero altri modi degeneri quali il TE[2,0] ed il TE[0,1], o il
TE[4,0] ed il TE[0,2] o il TE-TM4,1 ed il TE-TM2,2, ecc..
• Di particolare interesse è il caso a=b (k=1), cioè di guida a sezione
quadrata.
In tal caso, fissati gli indici m e n non nulli, si hanno generalmente i quattro
modi degeneri:
TE[m,n], TM(m,n), TE[n,m], TM(n,m)
m 2π 2 n 2π 2
2
in corrispondenza dell’autovalore kt = − 2 + 2
a
a
Considerando uno degli indici nullo, si hanno invece due modi degeneri; alla
più bassa frequenza critica corrispondono due modi dominanti: il TE[1,0] ed il
TE[0,1], aventi il campo elettrico polarizzato rispettivamente secondo y0 e
secondo x0.
Questa situazione è sconsigliabile in pratica, in quanto per effetto di
irregolarità della guida si hanno facilmente delle conversioni d’energia fra i
modi; avendo all’uscita dei dispositivi capaci di ricevere modi polarizzati
166
secondo una sola direzione, si possono avere forti perdite.
Microonde - Campi e.m. nelle strutture guidanti
Richiami sulle funzioni di Bessel
• La funzione di Bessel di prima specie di ordine intero è esprimibile
analiticamente come serie di potenze:
( −1)k ( x / 2)n + 2 k
Jn ( x ) = ∑
k !(n + k )!
k =0
∞
L’intero n può essere positivo, negativo o nullo, valendo la proprietà per cui:
J − n ( x ) = ( −1)n Jn ( x )
• La funzione di Bessel di seconda specie di ordine intero è invece:
n −1
1
x
(n − k − 1)!( x / 2)− n + 2k
Yn ( x ) = 2 γ + lg J n ( x ) − ∑
+
2
k!
π
k =0
∞
( −1)k ( x / 2)n + 2 k
(
k
)
(
n
k
)
−∑
Φ
+
Φ
+
[
]
k !(n + k )!
k =0
167
con: Φ( k ) = 1 + 1/ 2 + 1/ 3 + ... + 1/ k e γ = 0.577... (costante di Eulero)
• Le funzioni J n ( x ) e Yn ( x ) sono soluzioni linearmente indipendenti
dell’equazione differenziale di Bessel con parametro intero
d 2B( x ) 1 dB( x ) n 2
+
+ 1 − 2 B( x ) = 0
2
dx
x dx
x
ed una loro combinazione lineare ne fornisce la soluzione generale:
B( x ) = C1J n ( x ) + C2Yn ( x )
• Per le funzioni di Bessel valgono importanti formule di ricorrenza, ad es.:
xJν +1( x ) = ν Jν ( x ) − xJν ( x )
I
J0 ( x ) = −J1( x )
e quando ν = 0 :
(per laYn ( x ) valgono relazioni perfettamente analoghe)
I
168
• Per quanto riguarda il comportamento nell’origine, si ha:
xν
+
per x → 0 : Jν ( x ) ~ ν
con ν reale ≠ -1,-2,…
2 Γ(ν + 1)
avendo indicato con Γ(α) la funzione euleriana di seconda specie, o funzione
gamma, prolungata per α negativi ma non interi;
n
2
(n − 1)!
per x → 0+: Yn ( x ) ~ −
con n≠0
n
πx
e:
x
Y0 ( x ) ~ lg
π 2
2
Quindi:
le J n ( x ) hanno per n ≠ 0 degli zeri di ordine n nell’origine, mentre per n=0 si
ha J0 ( x ) = 1,
leYn ( x ) per x → 0+ divergono a -∞ con ordine n per n ≠ 0 , come il logaritmo
per n=0.
169
• Gli sviluppi asintotici delle funzioni di Bessel di ordine intero permettono di
scrivere:
1/ 2
2
Jν ( x ) =
x
π
1/ 2
2
Yν ( x ) =
π
x
π
π
cos x − − ν + O x −3 / 2
4
2
(
π
π
sin x − − ν + O x −3 / 2
4
2
(
)
per
x→∞
)
per
x→∞
Quindi le funzioni di Bessel di ordine intero vanno a zero con ordine 1/2 per
x → ∞ , annullandosi infinite volte; in particolare, tendono ad assumere
approssimativamente la forma di sinusoidi smorzate, infatti per K intero
abbastanza grande i valori degli zeri di J n ( x ) e Yn ( x ) sono dati circa dalle
espressioni seguenti:
3
π
x K = π + ν + kπ
per la
Jν ( x )
4
2
π
π
x K = + ν + kπ
per la Yν ( x )
4
2
170
171
172
Microonde - Campi e.m. nelle strutture guidanti
Guida d’onda circolare
• Nel caso della guida d’onda a sezione circolare, conviene riferirsi al sistema
di coordinate cilindriche:
q1=r, q2= θ, z=z
• Le coordinate cilindriche sono legate a quelle cartesiane dalle seguenti
relazioni:
x = r cosθ
y = r sinθ
z=z
r = x2 + y 2
θ = arctg ( y / x )
z=z
y
x
z
θ0
z0
r0
r
θ
a
173
• La determinazione delle componenti trasversali dei campi TE e TM è
ricavabile risolvendo l’equazione di Helmholtz:
∇T =k T
2
t
2
t
dove :
hz ( r ,θ )
T =
ez ( r ,θ )
per le onde TE
per le onde TM
con le rispettive condizioni al contorno:
∂hz / ∂n = 0
sul contorno s per le onde TE
ez = 0
sul contorno s per le onde TM
Ricordiamo l’espressione del Laplaciano trasverso in coordinate cilindriche
generalizzate (q1 , q2 , z):
1 ∂ h2 ∂
∂ h1 ∂
2
∇t [ ] =
[
]
[
]
+
h1h2 ∂q1 h1 ∂q1 ∂q2 h2 ∂q2
Nel sistema di riferimento scelto (r, θ, z):
h1=1,
⇒ ∇ t2 [
1 ∂
] = r ∂r
h2=r,
2
∂
1 ∂
r ∂r [ ] + r 2 ∂θ 2 [
h3=1
∂2
] = ∂r 2 [
1 ∂
] + r ∂r [
1 ∂2
] + r 2 ∂θ174
2 [
]
L’equazione di Helmholtz assume pertanto la forma:
∂ 2T (r ,θ ) 1 ∂T (r ,θ ) 1 ∂ 2T (r ,θ )
2
+
+
=
k
t T ( r ,θ )
2
2
2
∂r
∂r
∂θ
r
r
e può essere risolta col metodo di separazione delle variabili, ponendo
l’autofunzione T (r ,θ ) uguale al prodotto di una funzione R(r) della sola r e
di una funzione Θ(θ) della sola θ :
T (r ,θ ) = R ( r )Θ(θ )
L’equazione delle onde diviene perciò:
d 2R (r ) 1
dR (r ) 1
d 2 Θ(θ )
2
Θ(θ )
+
Θ
(
θ
)
+
R
(
r
)
=
k
R ( r )Θ(θ )
t
2
2
2
dr
r
dr
r
dθ
L’autosoluzione nulla è priva di interesse, quindi dividiamo ambo i membri
per R ( r )Θ(θ ) ≠ 0:
1 d 2R (r )
1 dR (r )
1 d 2 Θ(θ )
2
+
+
=
k
t
R (r ) dr 2
rR ( r ) dr
r 2 Θ(θ ) dθ 2
175
moltiplicando ancora per r2:
r 2 d 2R (r )
r dR (r )
1 d 2 Θ(θ )
2 2
+
+
−
k
r =0
t
2
2
Θ(θ ) dθ
R (r ) dr
R (r ) dr
2
1
r 2 d 2R ( r )
r dR ( r )
d
Θ(θ )
2 2
⇒
+
−
k
r
=
−
t
R ( r ) dr 2
R ( r ) dr
Θ(θ ) dθ 2
con l’ultima forma si vuole evidenziare l'uguaglianza tra il primo membro,
che è funzione della sola variabile r, ed il secondo membro dipendente solo
da θ : affinché questa equazione sia verificata, al variare di r e θ in S,
entrambi i membri devono risultare costanti:
r 2 d 2R (r )
r dR ( r )
2 2
2
+
−
k
r
=
ν
t
2
R ( r ) dr
R (r ) dr
2
1
d
Θ(θ )
2
−
=
ν
Θ(θ ) dθ 2
r 2 d 2R ( r )
r dR (r )
2 2
2
k
r
+
−
−
=0
ν
t
2
R (r ) dr
R ( r ) dr
⇒
2
d Θ(θ ) = −ν 2 Θ(θ )
dθ 2
176
L’equazione:
d 2 Θ(θ )
2
=
−
ν
Θ(θ )
2
dθ
è quella dei moti armonici. Per ν ≠ 0 , la sua soluzione è del tipo:
Θ(θ ) = A1 sin (νθ ) + A2 cos (νθ )
Per avere l’univocità di Θ(θ) (e di conseguenza dell’autosoluzione e del
campo e.m.) deve essere:
Θ(θ + 2kπ ) = Θ(θ )
⇒ A1 sin ν (θ + 2kπ ) + A2 cos ν (θ + 2kπ ) = A1 sin (νθ ) + A2 cos (νθ )
⇒ A1 sin (νθ ) cos (ν 2kπ ) + A1 cos (νθ ) sin (ν 2kπ ) + A2 cos (νθ ) cos (ν 2kπ ) +
− A2 sin (νθ ) sin (ν 2kπ ) = A1 sin (νθ ) + A2 cos (νθ )
Ciò è verificato per ogni θ se e solo se ν risulta intero, in modo che:
c os ( 2ν kπ ) = 1
sin ( 2ν kπ ) = 0
177
Per ν =0, l’equazione dei moti armonici diviene:
d 2 Θ(θ )
=0
2
dθ
avente la soluzione generica:
Θ(θ ) = A1θ + A2
Dovendo ancora essere:
Θ(θ + 2kπ ) = Θ(θ ) ⇒ A1(θ + 2kπ ) + A2 = A1θ + A2
segue necessariamente: A1 = 0
Ma la soluzione ora trovata: Θ(θ ) = A1θ è ricavabile dalla soluzione:
Θ(θ ) = A1 sin (νθ ) + A2 cos (νθ )
qualora si ponga ν =0.
In definitiva l’espressione generale della Θ(θ) è:
Θ(θ ) = A1 sin ( nθ ) + A2 cos ( nθ )
con
n = 0,1,2,...
178
La R(r) può essere ottenuta dalla già ricavata equazione differenziale:
r 2 d 2R (r )
r dR ( r )
2 2
2
+
−
k
r
−
n
=0
t
2
R (r ) dr
R ( r ) dr
Moltiplicando per R/r2:
d 2R (r ) 1 dR ( r )
2 2
2
+
+
−
k
r
−
n
R (r ) = 0
(
)
t
2
dr
r dr
Essendo il generico autovalore kt2 reale negativo, poniamo:
−kt2 = χ 2
2
per cui χ risulta essere una quantità reale positiva; eseguiamo quindi il
cambio di variabile:
x = χr
Si ha:
dR dR dx
dR
=
=χ
dr
dx dr
dx
d 2R d dR
d dR
d dR
=
=
=
χ
χ
χ
χ
2
dr
dr dx
dx dr
dx dx
2
d
R(r )
2
=
χ
dr 2
179
Allora l’equazione in esame diviene:
2
2
2
2
d
R
(
x
)
χ
dR
(
x
)
n
2
χ
+
+ 1 − 2 χ R( x ) = 0
2
dx
x dx
x
d 2R ( x ) 1 dR ( x ) n 2
⇒
+
+ 1 − 2 R( x ) = 0
2
x dx
x
dx
che è la nota equazione di Bessel, nel caso particolare di ν parametro intero
(ν=n); la sua soluzione generale è esprimibile come combinazione lineare dei
due integrali particolari Jn(x) e Yn(x), funzioni di Bessel di prima e seconda
specie, rispettivamente:
R ( x ) = B1J n ( x ) + B2Yn ( x )
L’equazione differenziale di Bessel è in genere definita per x>0 (
r>0),
ma la sua soluzione generale ha una singolarità per x=0 (r=0), dovuta alla
presenza della Yn(x) che diverge quando x → 0 .
La R(x) è direttamente collegata ai valori delle grandezze fisiche del campo
e.m. e deve perciò risultare determinata e finita in ogni punto della guida,
180
compresi quelli dell’asse r=0
B2=0 e R(r)= B1 ϑν(χr)
L’autosoluzione T (r ,θ ) = R ( r )Θ(θ ) dell’equazione di Helmholtz assume
quindi la forma:
T (r ,θ ) = B1J n ( χ r ) [ A1 sin( nθ ) + A2 cos(nθ )]
Questa espressione può essere posta in forma più compatta.
Le costanti A1 e A2 possono sempre essere espresse in funzione di un’altra
opportuna coppia di costanti (P, ) mediante le seguenti relazioni:
A1 = −P sin ϕ
A2 = P cos ϕ
In questo modo si ha:
A1 sin( nθ ) + A2 cos( nθ ) = −P sin ϕ sin(nθ ) + P cos ϕ cos( nθ ) = P cos( nθ + ϕ )
e ponendo B1C=P l’autosoluzione può essere scritta come segue:
T (r ,θ ) = CJ n ( χ r )cos(nθ + ϕ )
con
n = 0,1,2,...
2
χ = −kt
181
Onde TE:
• L’autosoluzione per i modi TE è:
hz ( r ,θ ) = CJ n ( χ r )cos( nθ + ϕ )
• Imponiamo la condizione al contorno:
∂hz / ∂n = 0
su s
Nel sistema di riferimento che abbiamo scelto, il versore n0 della normale al
mantello metallico ha direzione radiale (n0=r0 su s); per cui, avendo indicato
con a il raggio della sezione della guida, la condizione al contorno diviene:
∂hz ( r ,θ )
dJ ( χ r )
= 0 ⇒ C cos( nθ + ϕ ) n
=0
∂r
dr
r =a
r =a
Questa condizione deve essere verificata per qualsiasi valore di :
dJ n ( χ r )
I
⇒
= 0 ⇒ Jn ( χ a) = 0
dr
r =a
Indichiamo con ξ nI ,m = χ a l’m-esimo zero (ordinato secondo valori crescenti
dell’argomento >0) della derivata della funzione di Bessel di prima specie
182 di
ordine n.
Ogni coppia di indici (n,m) individua il relativo χ per cui:
ξ nI ,m
χ = χ [ n,m ] =
a
Ricordando che si era posto:
−kt2 = χ 2
è quindi determinato lo spettro degli autovalori dei modi TE[n,m] in guida
d’onda circolare:
2
I
ξ n,m
n = 0,1,2
2
kt [ n,m ] = −
con
a
m = 1,2,3
Il generico modo TE[n,m] è ricavabile dall’autofunzione:
ξ nI ,m
hz (r ,θ ) = CJ n
a
r cos(nθ + ϕ )
costante di ampiezza individuabile
dalle condizioni di eccitazione
angolo di fase connesso
alla polarizzazione
iniziale dell’onda e.m.
183
ordinamento
degli zeri delle
derivate
I
ξ1,1
m
n
valori
numerici
I
I
ξ 2,1
ξ 0,1
0
1
2
1
3.832
1.841
3.054
I
ξ1,2
I
I
ξ 2,2
ξ 0,2
2
7.016
5.331
6.706
I
ξ1,3
I
I
ξ 2,3
ξ0,3
3
10.174
8.536
9.970
184
Nell’ordinare le radici della J n ( χ a ) = 0 non abbiamo considerato lo zero
ξ I = χ a = 0 (∀n ).
A questo zero corrisponde l’autovalore kt2 nullo e si ha:
I
per
per
n≠0
n=0
(→ J n (0) = 0) :
(→ J0 (0) = 1) :
hz (r ,θ ) = 0
hz (r ,θ ) = C cos ϕ
L’autosoluzione nulla o costante, dando luogo a campi e.m. privi di interesse,
non viene presa in esame.
Ciò comporta anche che in effetti kt2 è reale negativo.
185
• Deduciamo ora le varie componenti del campo TE[n,m]:
∇t [
]=
q10 ∂ [
] + q 20 ∂ [ ] = r ∂ [ ] + θ
h1 ∂q1
h2 ∂q2
0
∂r
⇒ h t (r ,θ ) = hr (r ,θ )r 0 + hϑ (r ,θ )θ 0 =
k z [ n,m ] ∂hz
1 ∂hz
= 2
r0
+θ 0
kt [ n,m ] ∂r
r ∂θ
k z [ n,m ] Cn ξ nI ,m
+ − 2
Jn
kt [ n,m ] r
a
e:
0
k z [ n,m ]
k
2
t [ n ,m ]
1 ∂[ ]
r ∂θ
∇t hz (r ,θ ) =
I
I
k z [ n,m ] ξ n,m I ξ n,m
C
Jn
= k2
a
t [ n,m ]
a
r cos(nθ + ϕ ) r 0 +
r sin(nθ + ϕ ) θ 0
jωµ
et (r ,θ ) = er (r ,θ )r 0 + eθ (r ,θ )θ 0 =
ht × z0 =
k z [ n,m ]
r0 θ0
=
jωµ
hr
k z [ n,m ]
0
z0
hθ
0 =
0
1
jωµ
jωµ
hθ r 0 −
hr θ 0
k z [ n,m ]
k z [ n,m ]
186
• Riassumiamo le componenti trasverse di un’onda TE in guida circolare
ideale:
I
jωµ n ξn,m
er (r ,θ ) = −C 2
Jn
r sin(nθ + ϕ )
kt [ n,m ] r a
I
I
jωµ ξ n,m I ξn,m
eθ (r ,θ ) = −C 2
Jn
r cos(nθ + ϕ )
kt [ n,m ] a
a
ez (r ,θ ) = 0
k z [ n,m ] ξ nI ,m I ξ nI ,m
hr (r ,θ ) = C 2
Jn
kt [ n,m ] a
a
r cos(nθ + ϕ )
k z [ n,m ] n ξ nI ,m
hθ (r ,θ ) = −C 2
Jn
r sin(nθ + ϕ )
kt [ n,m ] r a
ξnI ,m
hz (r ,θ ) = CJ n
r cos(nθ + ϕ )
a
187
• La legge di dipendenza da z è del tipo:
Ze ( z ) = P1e kz z + P2e − kz z
Zh ( z ) = −P1e kz z + P2e − kz z
• Si ha quindi la completa conoscenza del campo TE:
E = E t = et (r ,θ )Ze ( z ) = er (r ,θ )Ze ( z )r 0 + eθ (r ,θ )Ze ( z )θ 0
H = H t + H z z 0 = ht (r ,θ )Zh ( z ) + hz (r ,θ )Ze ( z )z 0 =
= hr (r ,θ )Zh ( z )r 0 + hθ (r ,θ )Zh ( z )θ 0 + hz (r ,θ )Ze ( z )z 0
• La costante di propagazione kz risulta determinata per ogni modo dalla
relazione:
2
I
ξ
k z [ n,m ] = k 2 − kt2[ n,m ] = −ω 2 µε c + n,m
188
a
• Considerando il dielettrico non dissipativo è possibile individuare la
frequenza di taglio di un modo tramite la:
ωc2 µε = −kt2[n,m ]
ξ nI ,m
=
a
⇒ fc [ m,n ]
2
⇒ ωc =
I
1 ξ n,m
µε a
I
ωc
c ξ n,m
=
=
2π 2π a
Come al solito, si può osservare che la frequenza di cut-off di ogni modo
dipende esclusivamente dalla struttura, tramite ε e µ del mezzo e la
dimensione a della sezione.
Con riferimento ai dati della tabella degli zeri delle derivate delle funzioni di
Bessel di prima specie mostrata in precedenza, il minimo valore che la
frequenza di taglio può assumere al variare degli indici m e n si ottiene per
m=1 e n=1 (in corrispondenza del primo zero della derivata della funzione di
I
Bessel di prima specie di ordine 1: ξ1,1
= 1.841... ):
fc [1,1]
cξ nI ,m
c
=
≈ 0.293
2π a
a
il modo TE[n,m] è il modo dominante in
189
guida d’onda circolare
Onde TM:
• L’autosoluzione per i modi TM è:
ez ( r ,θ ) = CJ n ( χ r )cos( nθ + ϕ )
• Imponiamo la condizione al contorno:
ez = 0
su s
ez ( r ,θ ) r =a = 0 ⇒ CJ n ( χ r )cos(nθ + ϕ ) r =a = 0 ⇒ J n ( χ a ) = 0
Indichiamo con ξ n,m = χ a l’m-esimo zero della funzione di Bessel di prima
specie di ordine n.
Ogni coppia di indici (n,m) individua il relativo χ :
ξ
χ = χ ( n,m ) = n,m
a
E’ quindi determinato lo spettro degli autovalori dei modi TM(n,m) in guida
d’onda circolare (non consideriamo il caso banale, per n≠0, di ξ = 0 ):
k
2
t ( n ,m )
ξ n,m
= −
a
2
con
n = 0,1,2
m = 1,2,3
190
ordinamento
degli zeri
ξ0,1
m
n
valori
numerici
0
1
2
ξ1,1
1
2.405
3.832
5.135
ξ 2,1ξ0,2
ξ1,2 ξ 2,2 ξ0,3
2
5.520
7.016
8.417
ξ1,3
3
8.654
10.174
11.620
191
Il generico modo TM(n,m) è ricavabile dall’autofunzione:
ξ n,m
ez (r ,θ ) = CJ n
r cos(nθ + ϕ )
a
Deduciamo le varie componenti del campo TM(n,m):
k z ( n,m )
et (r ,θ ) = er (r ,θ )r 0 + eϑ (r ,θ )θ 0 = 2
∇t ez (r ,θ ) =
kt ( n,m )
k z ( n,m ) ∂ez
1 ∂ez
= 2
r
+
θ
0
0
kt ( n,m ) ∂r
r ∂θ
k z ( n,m ) ξ n,m I ξ n,m
C
Jn
= k2
a
t ( n,m )
a
r cos(nθ + ϕ ) r 0 +
k z ( n,m ) Cn ξ n,m
+ − 2
Jn
a
kt ( n,m ) r
r sin(nθ + ϕ ) θ 0
jωε c
ht (r ,θ ) = hr (r ,θ )r 0 + hθ (r ,θ )θ 0 =
z 0 × et =
k z ( n,m )
r0 θ0
=
jωε c
0
k z ( n,m )
er
z0
0
1 =−
eθ
0
jωε c
jωε c
eθ r 0 +
er θ 0
k z ( n,m )
k z ( n,m )
192
• Riassumiamo le componenti trasverse di un’onda TM in guida circolare
ideale:
k z ( n,m ) ξ n,m I ξ n,m
er (r ,θ ) = C 2
Jn
r cos(nθ + ϕ )
kt ( n,m ) a
a
k z ( n,m ) n ξ n,m
eθ (r ,θ ) = −C 2
Jn
r sin(nθ + ϕ )
kt ( n,m ) r a
ξ n,m
ez (r ,θ ) = CJn
a
r cos(nθ + ϕ )
jωε c n ξ n,m
hr (r ,θ ) = C 2
Jn
kt ( n,m ) r a
r sin(nθ + ϕ )
jωε c ξ n,m I ξ n,m
hθ (r ,θ ) = C 2
Jn
kt ( n,m ) a
a
hz (r ,θ ) = 0
r cos(nθ + ϕ )
193
• La legge di dipendenza da z è al solito del tipo:
Ze ( z ) = P1e kz z + P2e − kz z
Zh ( z ) = −P1e kz z + P2e − kz z
• Si ha quindi la completa conoscenza del campo TM:
E = E t + Ez z 0 = et (r ,θ )Ze ( z ) + ez (r ,θ )Zh ( z )z 0 =
= er (r ,θ )Ze ( z )r 0 + eθ (r ,θ )Ze ( z )θ 0 + ez (r ,θ )Zh ( z )z 0
H = H t = ht (r ,θ )Zh ( z ) = hr (r ,θ )Zh ( z )r 0 + hθ (r ,θ )Zh ( z )θ 0
• La costante di propagazione kz risulta determinata per ogni modo dalla
relazione:
2
ξ
k z ( n,m ) = k 2 − kt2( n,m ) = −ω 2 µε c + n,m
194
a
• Considerando il dielettrico non dissipativo è possibile individuare la
frequenza di taglio di un modo tramite la:
ξ n,m
2
2
ω c µε = −kt =
a
2
⇒ fc ( m,n ) =
⇒ ωc =
1 ξ n,m
µε a
ωc
c ξ n,m
=
2π 2π a
195
Modo dominante
• Riferendosi ai dati forniti dai grafici e dalle tabelle sulle funzioni di Bessel e
le loro derivate, è possibile ricavare lo spettro dei modi di propagazione in
guida d’onda circolare (di sezione avente raggio a).
Ricordando che:
I
ξ
n ,m
2
kt [ n,m ] = −
a
I
c ξ n,m
fc [ m,n ] =
2π a
λc [ m,n ] =
c
fc [ m,n ]
=
2
2π a
ξ nI ,m
ξ n,m
2
kt ( n,m ) = −
a
c ξ n,m
fc ( m,n ) =
2π a
λc ( m,n ) =
2
2π a
ξ n,m
si può costruire una tabella di valori per i primi modi.
196
Ordine
1
2
3
4
5
6
7
8
9
10
11
12
13
Modi
TE 11
TM 01
TE 21
TE 01-TM 11
TM 21
TE 12
TM 02
TE 22
TE 02-TM 12
TM 22
TE 13
TM 03
TE 23
Zeri a|kt|2 (*)
1.841 3.389
2.405 5.784
3.054 9.327
3.832 14.684
5.135 26.368
5.331 28.420
5.520 30.470
6.706 44.970
7.016 49.224
8.417 70.846
8.536 72.863
8.654 74.892
9.970 99.401
afc (*)
8.784
11.475
14.572
18.284
24.501
25.437
26.338
31.997
33.477
40.161
40.729
41.292
47.572
λc/a (*)
3.413
2.613
2.057
1.640
1.224
1.179
1.138
0.937
0.896
0.746
0.736
0.726
0.630
(*) i valori numerici sono stati ottenuti considerando il raggio a della guida espresso in cm
• Nella banda di frequenze comprese tra 8.784/a e 11.475/a GHz (nel caso
ideale) si ha propagazione del solo modo dominante TE[1,1].
197
• Le componenti del modo dominante TE[1,1] sono rappresentate dalle
seguenti espressioni:
/ r
J
2 1 ξ11
jωµ a
a
er (r ,θ ) = C
sin (θ + ϕ )
/ 2
r
ξ11
eθ (r ,θ ) = C
jωµ a
r
I
J1 ξ11/ cos (θ + ϕ )
a
/ 2
11
ξ
ez (r ,θ ) = 0
hr (r ,θ ) = −C
j ω µε a − ξ
2
2
/ 2
11
ξ11/
2
hθ (r ,θ ) = C
ja ω 2 µε a 2 − ξ11/
ξ11/
r
I
J1 ξ11/ cos (θ + ϕ )
a
r
J1 ξ11/
a sin θ + ϕ
(
)
r
r
hz (r ,θ ) = CJ1 ξ11/ cos (θ + ϕ )
a
198
Dalle espressioni precedenti può dedursi l’andamento qualitativo delle linee
di forza per il campo e.m. TE[1,1] :
=0
=
0
campo elettrico
campo magnetico
L’orientamento delle linee di forza del campo e.m. è direttamente individuato
dal valore di ϕ, generalmente determinato dalle condizioni di eccitazione
iniziale. La polarizzazione dell’onda è perciò indipendente dalla struttura (ciò
è giustificabile intuitivamente in quanto la simmetria radiale della sezione
199
della guida non presenta direzioni privilegiate).
• Poiché nella guida possono propagarsi onde comunque polarizzate, alcune
alterazioni (deformazioni, imperfezioni varie, ecc.) in pratica vanno a
modificare, se rilevanti, la polarizzazione del campo: generalmente ciò
comporta perdite di informazione.
Per ovviare a questo tipo di inconvenienti, si è pensato, fra le altre cose, di
utilizzare al posto delle guide circolari quelle a sezione ellittica, i cui assi
definiscono direzioni privilegiate per le linee di forza.
200
Modi circolari e modi degeneri
• La classe di modi TE[0,m] risulta particolarmente interessante.
Dall’espressione generale dei TE, ponendo n=0, si ottiene:
er (r ) = 0
I
I
jωµ ξ0,m I ξ0,m
eθ (r ) = −C 2
J0
kt [0,m ] a
a
ez (r ) = 0
k z [0,m ] ξ0,I m I ξ0,I m
hr (r ) = C 2
J0
kt [0,m ] a
a
hθ (r ) = 0
r cos ϕ
r cos ϕ
ξ0,I m
hz (r ) = C cos ϕ J0
r
a
Questi modi sono detti circolari elettrici in quanto il campo elettrico che
(come quello magnetico) dipende solo da r, è puramente circonferenziale.
201
• Linee di forza del campo elettrico per i modi circolari elettrici
(criterio di Faraday):
TE[0,1]
TE[0,2],
e
e
r
ξ oI 1
eθ ∝ J
r
a
I
0
r
ξ oI 2
eθ ∝ J
r
a
I
0
202
• Analisi dell’attenuazione dei modi circolari elettrici:
Essendo sempre nulla la componente circonferenziale del campo magnetico
htτ = ht ⋅ s 0 = hr (r )r 0 ⋅ θ 0 = 0
I
ed il mantello metallico della guida è percorso solo da correnti
circonferenziali.
Le perdite energetiche dovute alle dissipazioni per effetto Joule di queste
correnti, possono essere valutate attraverso la costante di attenuazione per
unità di lunghezza αz(ω).
Secondo la notazione già adottata si ha: αz [0,m](ω)=C(ω) (infatti il termine
L(ω) si annulla).
αz[0,m](ω)
Allora i modi circolari elettrici
presentano un’attenuazione
sempre minore all’aumentare
della frequenza, tendendo a
ω → ∞ zero con ordine 3/2
per.
(ωc,0)
ω203
La bassa attenuazione alle alte frequenze dei TE[0,m] rispetto ai generici
TE[m,n], ha suggerito l’uso dei modi circolari per collegamenti a grande
distanza.
Questo tipo di trasmissione comporta però problemi di carattere tecnico che
generalmente si manifestano quando si lavora con frequenze maggiori di
quelle della banda unimodale (per evitare questo inconveniente si cerca di
rendere massima l’attenuazione per i modi parassiti, ossia per i modi
indesiderati di ordine inferiore, ad esempio con guide ad elica).
• Dalla proprietà delle funzioni di Bessel:
J0 ( x ) = −J1( x )
I
si ha che gli zeri della derivata della funzione di Bessel di ordine zero
coincidono con quelli della funzione di Bessel di ordine uno:
ξ 0,I m = ξ1,m
m = 1,2,3...
⇒ kt2[0,m ] = kt2(1,m ) ⇒ k z [0,m ] = k z (1,m )
204
I modi circolari elettrici TE[0,m] e i modi TM(1,m) sono pertanto degeneri.
Microonde - Campi e.m. nelle strutture guidanti
Strutture guidanti a due o più conduttori
• Alcune fra le più note strutture guidanti a più conduttori:
linea bifilare
microstriscia
linee a striscia
cavo coassiale
linea bifilare
schermata
205
• Le strutture guidanti a più conduttori possono essere divise in:
- strutture dal contorno metallico aperto (il campo e.m. invade tutto lo spazio)
- strutture dal contorno metallico chiuso (il campo e.m. rimane
sostanzialmente confinato all’interno di un mantello conduttore schermante)
• Le strutture guidanti ideali a più conduttori con mezzo trasmissivo omogeneo
ed isotropo sono caratterizzate dalla fondamentale proprietà di poter
trasmettere onde TEM (oltre a quelle TE e TM).
Per le microstrisce, costituite da dielettrico non omogeneo (esistendo due
mezzi trasmissivi diversi), non è possibile avere la propagazione di onde TEM.
• Ricordiamo alcune proprietà dei campi TEM:
- un campo TEM propagantesi in una struttura guidante ideale (metallo con
g=∞), con dielettrico non dispersivo, omogeneo ed isotropo, a simmetrica
cilindrica, ha per definizione nulle le componenti longitudinali di E e H :
Ez = Hz = 0
E = E t = e t ( q 1, q 2 ) Z e ( z )
H = H t = h t ( q 1, q 2 ) Z h ( z )
Z e ( z ) = P1e k z z + P2 e − k z z
Z h ( z ) = − P1e k z z + P2 e − k z z
206
inoltre si ha:
k z2 = −ω 2 µε c = k 2
k t2 = 0
- Se il dielettrico è anche non dissipativo (g=0):
αz = 0
2
2
k z = −ω µε ⇒ k z = α z + j β z = j ω µε ⇒
ω
β
=
ω
µε
=
z
c
ed il modo TEM può propagarsi senza attenuazione a qualsiasi frequenza (il
caso ω=0 rappresentando un campo elettrostatico): esso risulta allora il
modo dominante, avendo i campi TE e TM frequenza di taglio non nulla.
La banda di regime unimodale è pertanto delimitata dalla frequenza di taglio
del primo modo di ordine superiore (che, come può dimostrarsi, risulta
sempre un TE).
- Dalla dipendenza lineare con la frequenza della costante di fase dell’onda
TEM, consegue che le relative velocità di fase, dell’energia e di gruppo
coincidono fra loro, risultando indipendenti da ω e pari alla velocità della
luce nel mezzo c:
207
u z = uw = u g = c
sistema non dispersivo
• In realtà la presenza di dissipazioni energetiche modifica le considerazioni
teoriche:
le correnti che si generano sui mantelli metallici implicano generalmente
l’esistenza di componenti assiali dei campi e.m., per cui non si ha un vero e
proprio modo TEM ma piuttosto un modo ibrido.
• Per quanto riguarda il problema e.m. sulla generica sezione trasversale, si ha
che per un’onda TEM e t ( q1, q 2 ) e h t ( q1, q 2 ) sono tra loro ortogonali:
e t = ZTEM h t × z 0
L’impedenza d’onda è indipendente dalla forma della struttura e coincide con
l’impedenza caratteristica del mezzo in cui si ha propagazione:
ZTEM =
µ
εc
208
• Abbiamo visto che e t ( q1, q 2 ) risulta irrotazionale e solenoidale in regioni
prive di sorgenti, potendosi collegare ad un potenziale scalare mediante la
relazione seguente:
e t ( q1, q 2 ) = −∇ t Φ ( q1, q 2 )
dove Φ deve soddisfare l’equazione di Laplace:
∇ t2 Φ ( q1, q 2 ) = 0
in ogni punto della sezione S esterna ai conduttori, risultando costante sul
bordo di ognuno di essi.
• Come già dimostrato, soluzioni Φ non costanti possono aversi solo in campi
non semplicemente connessi, cui corrispondono strutture guidanti costituite
da più conduttori disgiunti.
209
• Analizziamo per semplicità linee guidanti costituite da due conduttori ideali
con dielettrico omogeneo, isotropo e privo di perdite.
1 s1
s2
S
A
l0
z0
1
B
s1
A
l0
B
2
S
s2
2
struttura a due conduttori
chiusa
struttura a due conduttori
aperta
Le condizioni al contorno sono Φ = ϕ 1 sul bordo s1 del conduttore 1
Φ = ϕ 2 sul bordo s2 del conduttore 2
Per l’esistenza di campi TEM deve imporsi:
ϕ1 ≠ ϕ 2
210
• L’integrale di linea di e t sul piano trasverso fra un generico punto A su s1 e
uno B su s2, lungo un qualsiasi percorso orientato l ∈ S (con versore l0), è dato
da:
∫
∫
e t ⋅ l 0 dl =
l ( A ,B )
−∇ t Φ ⋅ l 0 dl = −
l ( A ,B )
∂Φ
dl =
∫
∂l
l ( A ,B )
= − [ Φ ( B ) − Φ ( A ) ] = ϕ 1 − ϕ 2 = V0
esso è cioè indipendente dal percorso scelto, coincidendo col valore V0 = ϕ 1 − ϕ 2
• Proprietà analoghe si possono dedurre per E t :
∫
l ( A ,B )
E ⋅ l 0 dl =
∫
E t ⋅ l 0 dl = Z e ( z )
l ( A ,B )
∫
e t ⋅ l 0 dl
l ( A ,B )
= Z e ( z )V0 = V ( z )
Si può quindi definire un’onda di potenziale V(z).
211
(+)
(−)
• Per il campo diretto E t e per quello riflesso E t si ha rispettivamente:
∫
(+)
⋅ l 0 dl = P2 e − jk z zV0 = V ( + ) ( z )
Et
l ( A ,B )
∫
(−)
Et
⋅ l 0 dl = P1e jk z zV0 = V ( − ) ( z )
l ( A ,B )
e per l’onda di potenziale possiamo scrivere: V ( z ) = V ( + ) ( z ) + V ( − ) ( z )
• Consideriamo ora il campo magnetico: la
sua circuitazione sul piano trasverso lungo
una linea s (di versore s0) circondante un
conduttore, diviene per il teorema di Stokes:
∫ H ⋅ s
s
0
ds =
∫ H
s
t
⋅ s 0 ds =
∫ ∇ ×H
t
⋅ z 0 dS
z0
n0
S'
Sc
S'
dove S ' è la superficie piana (orientata
secondo la convenzione per cui si vede s
percorsa in verso antiorario) delimitata da s.
s0
sc
s
212
Dall’equazione di Maxwell:
∇ × H = j ωε E + J ⇒ ∇ × H t = j ωε E t + J
si ricava:
∫ H
s
t
⋅ s 0 ds =
∫ ( jωε E
t
+ J ) ⋅ z 0 dS =
S'
∫
j ωε E t ⋅ z 0 dS +
S'
∫ J ⋅z
0
dS
S'
in cui il primo integrale a secondo membro è nullo ( E t ⊥ z 0 ).
La densità di corrente è presente solo sulla superficie esterna del conduttore che
si è ipotizzato ideale, si ha infatti la nota condizione di continuità (n0 uscente
dal metallo):
n 0 × H t = J S = JS z 0
su
sc
La densità superficiale di corrente J S A ⋅ m − 1 è diretta assialmente, si ha
quindi:
∫ J ⋅z
S'
0
dS =
∫ J
sc
S
⋅ z 0 ds =
∫ J
S
ds
sc
213
La circuitazione di H t diviene allora:
∫ H
t
⋅ s 0 ds =
s
∫ J
S
[A]
ds = Ι
sc
dove con I si è indicata la corrente che percorre la superficie esterna del
conduttore in direzione longitudinale: essa è considerata positiva se J S è
concorde con z0 ( J S > 0 ), negativa se discorde ( J S < 0 ).
L’espressione trovata rappresenta la Legge di Ampere.
J S e I risultano dipendenti dalla coordinata z secondo la stessa legge di
variazione Z h ( z ) del campo magnetico; infatti:
∫ H
t
⋅ s 0 ds = Z h ( z ) ∫ h t ( q1, q 2 ) ⋅ s 0 ds =
s
s
∫ J
S
( q1, q 2 , z ) ⋅ z 0 ds = I ( z )
sc
e pertanto:
J S ( q 1, q 2 , z ) = Z h ( z ) j S ( q 1, q 2 )
Ι( z ) = Ι 0 Z h ( z )
con I0 costante.
In tal modo il problema in funzione delle sole coordinate trasverse diventa,
n 0 × h t = j S = jS z 0
su:
sc
essendo
∫ h ( q , q
t
s
1
2
) ⋅ s 0 ds =
∫ j
sc
S
( q1, q 2 ) ⋅ z 0 ds =
∫ j
sc
S
( q1, q 2 )ds = Ι214
0
• Analogamente a quanto visto per V(z), si definisce un’onda di corrente I(z):
(+)
∫Ht
⋅ s 0 ds = P2 e − jk z z Ι 0 = Ι ( + ) ( z )
s
(−)
∫Ht
⋅ s 0 ds = − P1e jk z z Ι 0 = −Ι ( − ) ( z )
s
Ι( z ) = Ι ( + ) ( z ) − Ι ( − ) ( z )
• Riassumendo, il problema della determinazione del campo e.m. TEM è
riconducibile ad un problema di tipo statico, risultando Φ, et , ht indipendenti da
ω.
La componente et è infatti generata da due conduttori aventi differenza di
potenziale elettrostatico V0.
La componente ht è generata dalle correnti stazionarie ±I0 che percorrono in
versi opposti le superfici metalliche.
215
• Accenniamo ora al comportamento di un campo e.m. generico, avente le
componenti longitudinali di E e H non nulle. Infatti, come già osservato, non è
possibile avere in pratica modi guidati propriamente del tipo TEM, TE o TM, a
causa delle dissipazioni.
Cercheremo anche di chiarire quali sono i limiti entro i quali è ragionevole
approssimare i campi reali con quelli ideali.
In una struttura guidante a più conduttori il generico campo e.m. soddisfa le
equazioni di Maxwell:
∇ × E = − j ωµ H ⇒
∫∇ ×E ⋅z
0
dS =
S
∫ E ⋅ s
0
ds = ∫ − j ωµ H ⋅ z 0 dS
s
S
essendo S una qualsiasi superficie piana di contorno s.
La precedente espressione (legge di Faraday-Neumann-Lentz), ricordando che:
Ez z0 ⊥ s0
H t ⊥ z0
E t = Ze et
H z = Z e hz
assume la forma:
∫ E
s
t
⋅ s 0 ds = − j ωµ ∫ H z ⋅ z 0 dS ⇒
S
∫ e
s
t
⋅ s 0 ds = − j ωµ ∫ hz dS
S
216
Quindi il campo elettrico trasverso è in genere non conservativo, per la
presenza di un flusso assiale di induzione magnetica variabile (generante una
forza elettromotrice indotta): si ha conservatività (per ω >0) solo se hz = 0
su S (campi TM e TEM).
Analogamente si ottiene:
∇ × H = j ωµε E + J
⇒
∫∇ ×H ⋅z
0
dS =
S
∫ H ⋅ s
0
ds = ∫ j ωε E ⋅ z 0 dS + ∫ J ⋅ z 0 dS
s
S
S
La precedente espressione ricordando che:
Hz z0 ⊥ s0
E t ⊥ z0
H t = Zh ht
E z = Z h ez
ed indicando con
∫J ⋅z
0
dS =
∑ ∫ J
i
S
si
⋅ z 0 ds = ∑ Ι i
i
s ci
la somma algebrica delle correnti longitudinali che percorrono le superfici sci
dei conduttori concatenati con s ( Ι ( z ) = Z ( z )Ι ), abbiamo:
i
∫ H
s
t
h
0i
⋅ s 0 ds = j ωε ∫ E z dS + ∑ Ι i ⇒ ∫ h t ⋅ s 0 ds = j ωε ∫ e z dS + ∑ Ι 0 i217
S
i
s
S
i
La non conservatività del campo magnetico è causata, oltre che dalle eventuali
correnti di conduzione, anche dalla presenza della corrente di spostamento,
legata al flusso assiale di D = ε E : questa è nulla (per ω>0) solo se e z = 0
su S (campi TE e TEM).
In definitiva è lecito ricondurre l’analisi di campi e.m. reali alla teoria ideale
fin qui svolta per i modi TE, TM, TEM, per quella gamma di frequenze che
rendono trascurabili i valori della correnti di spostamento (TE), di induzione
(TM), o di entrambe (TEM).
218
Microonde - Campi e.m. nelle strutture guidanti
Cavo coassiale
• La struttura guidante considerata (conduttore e dielettrico perfetti) è la
seguente:
Sistema di riferimento:
coordinate cilindriche
q1=r, q2=θ, z=z
y
x
z
θ0
z0
r
θ
2a
S
diametro esterno
del conduttore interno
2b
diametro interno
del conduttore
esterno
219
• L’espressione delle componenti sul piano trasverso per il TEM si ottiene
dalla:
∇ t2 Φ ( q1, q 2 ) = 0
su S
con le condizioni al contorno:
Φ = ϕa
costante sul bordo del conduttore interno sa
Φ = ϕb
costante sul bordo del conduttore esterno sb
• In coordinate polari:
∂ 2 Φ ( r ,θ ) 1 ∂Φ ( r ,θ ) 1 ∂ 2 Φ ( r ,θ )
∇ Φ ( r ,θ ) =
+
+ 2
=0
2
2
∂r
r
∂r
r
∂θ
Φ = ϕa
per
r = a, ∀ θ
2
t
Φ = ϕb
per
r = b, ∀ θ
• Con il metodo di separazione delle variabili si può ricavare l’autofunzione
nella forma:
Φ ( r ,θ ) = R ( r )Θ (θ )
220
d 2R ( r ) 1
dR ( r ) 1
d 2 Θ (θ )
Θ (θ )
+ Θ (θ )
+ 2 R (r )
=0
2
2
dr
r
dr
r
dθ
Moltiplicando per la quantità r 2 / R Θ (dove l’autosoluzione Φ = R Θ = 0
è priva di interesse):
r 2 d 2R
r dR
1 d 2Θ
+
+
=0
2
2
R dr
R dr
Θ dΘ
r 2 d 2R
r dR
1 d 2Θ
⇒
+
=−
2
R dr
R dr
Θ dΘ2
L’uguaglianza tra i due membri, uno funzione della sola r, l’altro della sola θ,
è verificata soltanto qualora questi assumano, al variare di r e θ, il medesimo
valore costante:
r 2 d 2R
r dR
1 d 2Θ
2
+
=
−
=
ν
R dr 2
R dr
Θ dΘ2
r 2 d 2R
r dR
2
+
−
ν
=0
2
R dr
R dr
⇒
2
d
Θ
2
ν
=
−
Θ
221
2
dΘ
La seconda equazione è la nota equazione dei moti armonici, avente la
soluzione:
per
ν ≠0
Θ (θ ) = A1 sin(νθ ) + A2 cos(νθ )
ν =0
per
Θ (θ ) = A1θ + A2
Affinchè Φ = R Θ risulti costante sul contorno metallico
R ( a )Θ (θ ) = ϕ a
R ( b )Θ (θ ) = ϕ b
la funzione Θ deve considerarsi indipendente da θ, il che implica:
ν =0
e
A1 = 0
⇒ Θ (θ ) = A2 = cos t
Per la R(r) si ha allora l’equazione differenziale:
r 2 d 2R
r
+
R dr 2
R
d dR
⇒
r
dr dr
dR
d 2 R dR
=0⇒r
+
=0
2
dr
dr
dr
A3
dR
dR
=
0
⇒
=
⇒
=
r
A
3
dr
dr
r
222
Integrando:
R ( r ) = A3 ln r + A4
con A3, A4, costanti.
L’autosoluzione Θ risulta dunque in questo caso indipendente dalla
coordinata θ, avendosi (ponendo A2A3=C1 e A2A4=C2):
Φ ( r ,θ ) = Φ ( r ) = A2 ( A3 ln r + A4 ) = C1 ln r + C 2
Le costanti C1 e C2 sono direttamente legate ai valori del potenziale Φ sul
contorno ed alle dimensioni a e b della struttura, si hanno infatti le
condizioni:
per
r = a, ∀ θ
ϕ a = C1 ln a + C 2
per
r = b, ∀ θ
ϕ b = C1 ln b + C 2
⇒ ϕ b − ϕ a = C1 ln b − C1 ln a ⇒ C1 =
ϕb − ϕa
ln( b / a )
ϕ a ln b = C1 ln a ln b + C 2 ln b
ϕ b ln a = C1 ln a ln b + C 2 ln a
⇒ ϕ a ln b − ϕ b ln a = C 2 ln b − C 2 ln a ⇒ C 2 =
ϕ a ln b − ϕ b ln a
ln( b / a )
223
In definitiva si ha per il potenziale scalare:
1
(ϕ b − ϕ a ) ln r + ϕ a ln b − ϕ b ln a
Φ (r ) =
ln ( b / a )
• Le espressioni del campo e.m. per il modo fondamentale in cavo coassiale
sono date da:
E = E t = et Ze
H = H t = ht Zh
Le componenti e t , h t si ricavano da Φ con le note formule di derivazione:
d Φ (r )
ϕa − ϕb 1
V0
1
e t ( r ) = −∇ t Φ ( r ) = −
r0 =
r0 =
r0
dr
ln( b / a ) r
ln( b / a ) r
h t (r ) =
1
ZTE M
z 0 × e t (r ) =
ε ϕa − ϕb 1
θ0 =
µ ln ( b / a ) r
ε
1
V0
θ0
µ ln( b / a ) r
Il campo elettrico risulta puramente radiale, quello magnetico puramente
circonferenziale (essi sono indipendenti da θ e le loro intensità variano
secondo 1/r): il loro verso è determinato dal segno della differenza di 224
potenziale ϕ a − ϕ b = V0 .
• Linee di forza del campo TEM:
ϕa > ϕb
ϕa < ϕb
L’autofunzione Φ è interpretabile fisicamente come potenziale elettrostatico
della struttura in esame: in pratica la scelta del valori ϕ a e ϕ b è arbitraria,
risultando invece determinata la sola differenza di potenziale tra i due
conduttori ϕ a − ϕ b = V0 .
Ricordando l’espressione di Φ(r) si osserva che questa è definita a meno di
una costante additiva: il modo fondamentale è comunque ricavabile senza
indeterminazione, dipendendo unicamente da V0 (le espressioni dei campi
e.m. sono infatti legate a ∇ t Φ( r ) su cui la costante additiva non influisce).
225
Potenza
• La potenza media P (valor medio della potenza istantanea in un periodo)
trasmessa nella linea coassiale, è esprimibile come parte reale del flusso del
vettore di Poynting complesso attraverso la sezione S:
0 ≤ θ ≤ 2π
a≤r ≤b
S:
P = Re ∫
S
1
∗
E ×H ⋅ z 0 dS
2
Nelle ipotesi poste (struttura ideale priva di perdite) per il TEM si ha:
k z = j β z = j ω µε
per cui considerando la sola onda progressiva si ha:
∗
PP
∗
P = Re ∫ 2 2 e t × h t ⋅ z 0 dS
2
S
dove:
∗
∗
e t × h t ⋅ z 0 = z 0 × e t ⋅ h t = ZTEM h t ⋅ h t
P2 P2
⇒P =
2
∗
µ
∗
h
h
⋅
t
t dS
∫
ε S
∗
226
• Per il cavo coassiale:
ht =
⇒P =
P2 P2
=
2
∗
P2 P2
2
∗
V0
ε
1
θ0
µ ln( b / a ) r
µ ε V0
⋅
ε µ ln( b / a )
2
2 θ = 2π r = b
∫
θ
ε V0
b
2π ln = π
a
µ ln( b / a )
=0
1
∫r = a r 2 rdrdθ =
ε
V0
∗
P2 P2
ln( b / a )
µ
2
Le condizioni di eccitazione iniziale sulla potenza determinano il valore di P2.
227
Attenuazione
• Per il calcolo della costante di attenuazione α z del modo dominante in cavo
coassiale, ricordiamo l’espressione generale valida per un TEM guidato:
2
∗
αz =
1 Pd ( z )
=
2 P (z)
ωε
8g
∫ hτ ⋅ hτ ds
s
∫ h
S
∗
t
⋅ h t dS
=
∂Φ
∂ n ds
∫
ωε s
8 g ∇ t Φ 2 dS
∫
S
che era stata ricavata utilizzando il metodo di perturbazione, nell’ipotesi di
buon conduttore, dielettrico perfetto, sola onda progressiva.
• Nel caso del cavo coassiale si ha:
(s=sa+sb ds=rdθ
dS=rdrdθ)
V0
∂Φ ( r ) d Φ ( r )
1
=
= ∇ t Φ(r ) =
∂n
dr
ln( b / a ) r
αz =
θ = 2π
θ = 2π 1
V02
1
rd
θ
+
rd θ
2
2
2
∫
∫
r
ωε ln ( b / a ) θ = 0 r
θ =0
r =a
r = b θ = 2π
8g
V02
1
rdrd θ
2
2
∫
∫
ln ( b / a ) r = a θ = 0 r
r =b
228
⇒ αz =
1 1
2π +
ωε
a b =
8 g 2π ln( b / a )
1 1
ωε a + b
8 g ln( b / a )
La costante di attenuazione dipende, oltre che dalla frequenza e dalle
caratteristiche dei materiali usati, anche dalla geometria della struttura,
tramite a e b.
• Per ottimizzare la trasmissione d’energia in cavo coassiale è importante
calcolare il particolare rapporto tra le dimensioni trasversali dei conduttori (ad
es. b/a) per cui si abbia la minima perdita di potenza.
La costante di attenuazione può essere riscritta come segue (fissate la
frequenza e la dimensione b del conduttore esterno):
αz =
ωε
a+b
=
8 g ab ln( b / a )
ωε 1 1 + ( b / a )
8 g b ln( b / a )
=C
1+ x
ln x
229
Calcoliamo il valore minimo dell’attenuazione:
dα z
ln x − (1 + x ) / x
1
=c
= 0 ⇒ ln x = + 1
2
dx
ln x
x
che risolta numericamente o graficamente fornisce:
x opt = ( b / a )ottimale ≅ 3.591 ⇒ ( a / b )ottimale ≅ 0.278
Inoltre si ha:
α z m in = C
1+ x
(1 + x ) / x
= Cx opt ≅ 3.591C =
x opt
3.591 ωε
b
8g
Fissato il rapporto ottimale
tra b e a si può notare che
l’attenuazione diminuisce
ulteriormente al crescere dei
diametri dei conduttori ed
ovviamente all’aumentare
della loro conducibilità.
230
• La possibilità di avere attenuazioni sempre minori all’aumentare delle
dimensioni del cavo viene limitata dal fatto che al crescere di a e b diminuisce
il valore della frequenza di taglio del primo modo di ordine superiore,
restringendosi così l’ampiezza della banda di lavoro in regime unimodale.
Per la propagazione a frequenze elevate, le dimensioni dei cavi coassiali
devono perciò essere opportunamente delimitate, in considerazione anche di
problemi di carattere pratico (peso, ingombro, costo, …).
• In funzione delle dimensioni del cavo, della conducibilità del metallo e della
frequenza, l’attenuazione minima del modo TEM è:
α z m in = 9.470 ⋅ 10 −6
1
b
f
g
Np ⋅ m − 1
1
b
f
g
dB ⋅ km − 1
ovvero, poiché 1Np ≅ 0.115 dB :
α z m in = 1.089 ⋅ 10 − 3
231
Esempio: linea coassiale in rame
g Cu ≅ 5.8 ⋅ 10 7
α ( Cu ) = 1.243 ⋅ 10 − 9
z m in
f
b
Np ⋅ m − 1 ;
S ⋅ m −1
α ( Cu ) = 1.430 ⋅ 10 −7
z m in
f
b
dB ⋅ km − 1
In realtà queste formule hanno carattere puramente teorico: i cavi utilizzati in
pratica hanno infatti dimensioni normalizzate, con rapporti b/a leggermente
diversi da quello ottimale; si ha ad es.:
1) b=0.475 cm, a=0.130 cm
b/a ≈ 3.654; ZC=77.7 Ω
2) b=0.220 cm, a=0.060 cm
b/a ≈ 3.667; ZC=77.9 Ω
In questi due casi il calcolo dell’attenuazione dà rispettivamente:
1)
α ( Cu ) ≅ 2.6 ⋅ 10 −7 f
2)
α ( Cu ) ≅ 5.65 ⋅ 10 −7 f
z m in
z m in
Np ⋅ m − 1 ≅ 3 ⋅ 10 − 5 f
Np ⋅ m − 1 ≅ 6.5 ⋅ 10 − 5 f
dB ⋅ km − 1
dB ⋅ km − 1
232
• Per il calcolo dell’attenuazione per unità di lunghezza delle strutture guidanti
finora esaminate, abbiamo supposto le perdite energetiche derivanti
unicamente dalle dissipazioni sui mantelli metallici (costituiti da un buon
conduttore), ipotizzando invece perfetto il dielettrico.
• Talvolta è inevitabile l’uso di mezzi trasmissivi dissipativi, in particolare nei
cavi coassiali. E’ allora interessante determinare le perdite generate, per effetto
Joule, dalle correnti di conduzione in un dielettrico non ideale.
In un mezzo omogeneo ed isotropo con g≠0:
∇ × H = j ωε E + J = j ωε E + g E = j ωε c E
La ricerca delle soluzioni del problema agli autovalori sul piano trasversale
per i TE, TM e TEM, consistente in generale nell’integrazione della:
∇ t2T = k t2T
in cui k t2 è definito dalle proprietà geometriche della struttura, è
sostanzialmente indipendente dalle caratteristiche del dielettrico.
Le espressioni delle componenti possono quindi ottenersi da quelle ideali
233
semplicemente sostituendo εc a ε.
Importanti conseguenze si hanno invece per la costante di propagazione e
quindi anche per quella di attenuazione.
Il calcolo della costante di attenuazione relativa al dielettrico (con conduttore
perfetto), comporta in genere notevoli difficoltà di carattere analitico,
dipendendo fra l’altro dal particolare valore di k t2.
Con opportune approssimazioni è facilmente ricavabile una forma
particolarmente significativa per la costante di attenuazione dei modi TEM,
per i quali il valore di k z coincide con quello di k ( k t2 = 0 ):
e t = −∇ t Φ
ht =
εc
z0 × et
µ
(dove la funzione Φ è la stessa del caso ideale)
k z2 = k 2 = −ω 2 µε c = −ω 2 µε + j ωµ g
⇒ kz = α z + j βz =
−ω 2 µε + j ωµ g = j ω µε 1 −
jg
ωε
234
Nei buoni dielettrici le correnti di conduzione sono molto minori di quelle di
spostamento (piccole perdite) per cui:
g E << j ωε E ⇒ g << ωε
Allora ricordando che per |x|<<1 si ha con buona approssimazione (sviluppo
in serie di MacLaurin arrestato al termine di primo grado):
x
1− x ≅ 1−
2
per k z si può scrivere:
jg g
k z ≅ j ω µε 1 −
=
2ωε 2
µ
+ j ω µε
ε
Si ha cioè:
αz ≅
g
2
µ
ε
β ≅ ω µε
In tal caso è lecito considerare il modo TEM come un’onda piana che si
propaga con costante di fase lineare con ω, attenuandosi lungo z
235
proporzionalmente al valore di g.
Naturalmente si può anche determinare la costante di attenuazione con
riferimento al suo significato fisico:
αz =
1 Pd ( z )
2 P (z)
P ( z ) − P ( z + dz ) = Pd ( z )dz =
⇒ Pd ( z ) =
1
∗
g
E
⋅
E
dSdz ⇒
∫S 2
1
∗
g
E
⋅
E
dS
∫S 2
1
1
∗
∗
g
E
⋅
E
dS
g
E
⋅
E
dS
∫
∫
2
1 Pd ( z ) 1
1 2 S
g
S
=
=
=
αz =
1
∗
2 P (z)
2 Re
2 1 ε
2
∗
E
×
H
⋅
z
S
d
E ⋅ E dS
0
∫S 2
∫
2 µS
Si è utilizzato ancora un metodo di perturbazione, ipotizzando che piccole
perdite non alterano la configurazione del campo e.m. ideale: ε c → ε . 236
µ
ε
• Nel cavo coassiale si possono considerare separatamente le perdite dovute ai
conduttori ed al dielettrico, qualora esse non siano troppo grandi.
Vale cioè, approssimativamente, la relazione:
1 Pd ( z ) 1 Pd ( dielettrico ) ( z ) + Pd ( conduttore ) ( z )
αz =
=
=
2 P (z)
2
P (z)
= α zd + α zc
237
Modi TE e TM
• Esaminate le proprietà del modo dominante (TEM), vengono ora considerati
i modi di ordine superiore (TE, TM) in cavo coassiale.
∇ t2T = k t2T
per onde
TE
h z ( r ,θ )
T =
e
per onde
TM
e z ( r ,θ )
TE : ∂ h z / ∂ r = 0
su s
( r = a, r = b;0 ≤ θ ≤ 2π )
TM : e z = 0
su s
( r = a, r = b;0 ≤ θ ≤ 2π )
• Col metodo di separazione delle variabili si giunge, come nel caso di guida
circolare, alle seguenti espressioni:
T (r ,θ ) = R ( r )Θ(θ )
Θ(θ ) = A1 sin ( nθ ) + A2 cos ( nθ ) = P cos(nθ + ϕ )
R ( x ) = B1J n ( χ r ) + B2Yn ( χ r )
con
con
n = 0,1,2,...
χ 2 = −kt2 > 0
238
• La condizione B2=0 che si doveva imporre nella guida circolare per avere un
campo e.m. ovunque finito, non è necessaria in generale nel caso di cavo
coassiale.
La divergenza della Yn ( χ r ) per r tendente a zero, infatti, non influisce sulla
determinazione dell’autosoluzione, definita ora nella corona circolare S.
Si può però avere B2=0 nel caso degenere a=0, ovvero di una guida circolare
con filo metallico assiale.
T (r ,θ ) = P cos( nθ + ϕ ) [B1J n ( χ r ) + B2Yn ( χ r )]
n = 0,1,2,...
con : 2
2
χ
=
−
k
t
• ONDE TE:
hz (r ,θ ) = P cos(nθ + ϕ ) [B1Jn ( χ r ) + B2Yn ( χ r )]
∂hz
∂r
=
r =a
∂hz
∂r
=0
r =b
239
dJ n ( χ r )
dYn ( χ r )
θ
ϕ
P
cos(
n
+
)
B
+
B
2
1
=0
dr
dr
r =a
r =a
⇒
dYn ( χ r )
P cos(nθ + ϕ ) B dJ n ( χ r )
+ B2
1
=0
dr
dr
r =b
r =b
Dovendo ciò essere verificato per qualsiasi θ, si ottiene:
B1J nI ( χ a ) + B2YnI ( χ a ) = 0
I
I
B
J
(
b
)
+
B
Y
χ
1 n
2 n ( χ b) = 0
Tale sistema omogeneo di due equazioni in due incognite (B1, B2) ammette
soluzioni diverse dalla banale (autosoluzioni) se e solo se il determinante dei
coefficienti è nullo:
J nI ( χ a )YnI ( χ b ) − J nI ( χ b )YnI ( χ a ) = 0
che può anche porsi nella forma:
J nI ( χ a ) J nI ( χ b )
B2
= I
=−
I
Yn ( χ a ) Yn ( χ b )
B1
n = 0,1,2,... equazione caratteristica
240
Si dimostra che l’equazione caratteristica dei modi TE in cavo coassiale
ammette per ogni n (fissati a e b) un’infinità numerabile di soluzioni χ.
L’m-esima radice (m=1,2,3,…) dell’equazione caratteristica di indice2 n per i
I
I
TE, è indicata con χ nm cui corrisponde l’autovalore kt2[n,m ] = − ( χ nm
) con
n=0,1,2,…;m=1,2,…
Il problema analitico della determinazione delle soluzioni dell’equazione
caratteristica può essere semplificato attraverso una normalizzazione
opportuna che fa comparire il rapporto tra i diametri dei conduttori.
Infatti, ponendo bχ = ξ , per cui a χ = aξ / b = qξ (con q=a/b), si ha:
J nI (qξ ) J nI (ξ )
= I
I
Yn (qξ ) Yn (ξ )
n = 0,1,2,...
I
La soluzione ξ nm
risulta dunque sempre la stessa per ogni classe di cavi
coassiali aventi un determinato valore di q; da questa è poi possibile risalire
all’autovalore per ciascun cavo:
2
I
I
ξ nm
ξ nm
I
2
χ nm =
⇒ kt [ n,m ] = −
241
b
b
• ONDE TM:
ez (r ,θ ) = P cos(nθ + ϕ ) [B1Jn ( χ r ) + B2Yn ( χ r )]
ez
r =a
= ez
r =b
=0
P cos(nθ + ϕ ) B1J n ( χ r ) + B2Yn ( χ r ) = 0
r =a
r =a
⇒
P cos(nθ + ϕ ) B1J n ( χ r ) r =b + B2Yn ( χ r ) r =b = 0
B1Jn ( χ a ) + B2Yn ( χ a ) = 0
⇒
B1J n ( χ b ) + B2Yn ( χ b ) = 0
E di nuovo esistono autosoluzioni se e solo se:
J n ( χ a )Yn ( χ b ) − Jn ( χ b )Yn ( χ a ) = 0
Jn ( χ a ) Jn ( χ b )
B
=
=− 2
Yn ( χ a ) Yn ( χ b )
B1
n = 0,1,2,... equazione caratteristica
242
Si dimostra che l’equazione caratteristica dei modi TM in cavo coassiale
ammette per ogni n (fissati a e b) un’infinità numerabile di soluzioni χ.
L’m-esima radice (m=1,2,3,…) dell’equazione caratteristica di indice2 n per i
TM, è indicata con χ nm cui corrisponde l’autovalore kt2( n,m ) = − ( χ nm ) con
n=0,1,2,…;m=1,2,…
Il problema analitico della determinazione delle soluzioni dell’equazione
caratteristica può essere semplificato ponendo bχ = ξ , per cui
a χ = aξ / b = qξ (con q=a/b):
Jn (qξ ) Jn (ξ )
=
Yn (qξ ) Yn (ξ )
n = 0,1,2,...
La soluzione ξ nm risulta dunque sempre la stessa per ogni classe di cavi
coassiali aventi un determinato valore di q; da questa è poi possibile risalire
all’autovalore per ciascun cavo:
2
ξ
ξ
χ nm = nm ⇒ kt2( n,m ) = − nm
b
b
243
I
• Si può ricavare analiticamente che fra tutte le soluzioni ξ nm
e ξ nm , quella
I
avente valore minimo è la ξ1,1
, cui corrisponde il primo modo d’ordine
superiore TE[1,1] (delimitante la banda di range unimodale).
Per tale modo si ha:
kt2[n,m ]
ξ
= −
b
ωc [ n,m ] = c
I
nm
I
ξ1,1
(q )
2
1.9
I
ξ nm
b
I
c ξ nm
fc [ n,m ] =
2π b
b
λc [ n,m ] = 2π I
ξ nm
1.0
0
1
q
244
I
• Al diminuire del raggio del conduttore interno ( a → 0 ,q → 0 ), il valore di ξ1,1
essendo:
J1I (qξ )
J1I (ξ )
lim I
=0= I
q →0 Y (qξ )
Y1 (ξ )
1
si ottiene semplicemente dal primo zero della J1I (ξ ) = 0 che si ha quando
I
ξ = ξ1,1
= 1.841...
Pertanto, nel caso limite di a → 0, il primo modo di ordine superiore in cavo
coassiale tende ad assumere lo stesso autovalore, nonché la stessa frequenza
di taglio e la stessa configurazione, del modo dominante in guida circolare (di
raggio b).
• Il caso limite a → b , q → 0 , è privo di interesse, non esistendo più in pratica
il mezzo trasmissivo; l’equazione caratteristica, e quindi B1 e B2, risultano in
effetti indeterminate.
• Fissato un valore di q, il modulo di kt2 ed il valore di fc di ogni modo
diminuiscono al crescere delle dimensioni del cavo, riducendosi tra l’altro la
245
banda del range unimodale.
I
• La tabella fornisce lo spettro dei primi per un cavo coassiale con q=0.278 ξ1,1
(valore ottimale per l’attenuazione del TEM):
Ordine
-
Modi
TEM
Zeri ( )
-
bfc (*)
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
TE 11
TE 21
TE 31
TM 01
TE 01 – TM 11
TE 12
TE 41
TM 21
TE 22
TE 51
TM 31
TE 61
TM 41
TE 32
1.611
2.990
4.190
4.272
4.589
5.072
5.318
5.401
6.304
3.419
6.463
7.506
7.514
7.793
7.685
14.269
19.993
20.384
21.897
24.199
25.377
25.769
30.081
30.630
30.838
35.815
36.331
37.185
λc/b (*)
ℕ
3.901
2.101
1.499
1.471
1.369
1.239
1.181
1.163
0.997
0.979
0.972
0.837
0.825
0.806
(*) i valori numerici sono stati ottenuti considerando il raggio esterno b del cavo e λc espressi
in cm, fc espressa in GHz.
246
• Come nella guida circolare, i modi TE[0,m] e TM(1,m) sono degeneri, essendo:
J0I ( x ) = −J1 ( x )
Y0I ( x ) = −Y1 ( x )
....
• Diamo infine le espressioni delle componenti dei campi TE e TM.
I
Indicando per semplicità le χ nm e χ nm con χ , e ponendo:
I a
J
χ
n
b
B2 JnI (a χ ) JnI (b χ )
−
= I
= I
=
B1 Yn (a χ ) Yn (b χ )
I a
Yn χ
b
si ha per i modi TE:
I a
Jn χ
b
Y ( χ r )
hz (r ,θ ) = PB1 cos(nθ + ϕ ) Jn ( χ r ) −
n
a
I
Yn χ
b
247
h t ( r ,θ ) =
h ( r ,θ ) = k z
r
kt2
⇒
k
hθ (r ,θ ) = z2
kt
et (r ,θ ) =
kz
k z ∂hz
1 ∂hz
∇
h
=
r
+
θ 0 = hr r 0 + hθ θ 0
0
t z
2
2
kt
kt ∂r
r ∂θ
I a
Jn χ
b
kz
∂hz
Y I ( χ r )
=−
PB1 cos(nθ + ϕ ) J nI ( χ r ) −
n
2
a
∂r
−k t
I
Yn χ
b
I a
Jn χ
b
1 ∂hz
k z PB1n sin(nθ + ϕ )
Y ( χ r )
=− 2
Jn ( χ r ) −
n
a
r ∂θ
kt
r
I
Yn χ
b
jωµ
jωµ
jωµ
ht × z0 =
h
r
+
h
θ
×
z
=
( r 0 θ 0) 0
( hθ r 0 − hr θ 0 ) = er r 0 + eθ θ 0
kz
kz
kz
jωµ
e
(
r
,
θ
)
=
hθ
r
kz
⇒
e (r ,θ ) = − jωµ h
r
θ
kz
248
Analogamente si ha per i modi TM:
a
χ
J
n
b
Y ( χ r )
ez (r ,θ ) = PB1 cos(nθ + ϕ ) Jn ( χ r ) −
n
a
Yn χ
b
e t ( r ,θ ) =
kz
k z ∂ez
1 ∂ez
∇
e
=
r
+
θ 0 = er r 0 + eθ θ 0
0
t z
2
2
kt
kt ∂r
r ∂θ
a
Jn χ
b
∂
k
e
k
Y I ( χ r )
e ( r ,θ ) = z z = − z PB cos(nθ + ϕ ) J I ( χ r ) −
1
n
n
2
r
a
kt2 ∂r
−k t
Yn χ
b
⇒
a
Jn χ
b
k z 1 ∂ez
k z PB1n sin( nθ + ϕ )
Y ( χ r )
eθ ( r ,θ ) = 2
=− 2
Jn ( χ r ) −
n
kt r ∂θ
kt
r
I a
Yn χ
249
b
h t (r ,θ ) =
jωε c
jωε c
jωε c
z0 × et =
z 0 × ( er r 0 + eθ θ 0 ) =
( −eθ r 0 + er θ 0 ) = hr r 0 + hθ θ 0
kz
kz
kz
jωε c
h
(
r
,
)
=
−
eθ
θ
r
kz
⇒
h ( r ,θ ) = jωε c e
r
θ
kz
• Le leggi di dipendenza con z sono le solite per i TE e i TM:
Ze ( z ) = P1e kz z + P2e − kz z
Zh ( z ) = −P1e kz z + P2e − kz z
k z = −ω 2 µε c − kt2
250
Microonde - Campi e.m. nelle strutture guidanti
Guida d’onda a piatti paralleli con due dielettrici
y
ε = ε r ε 0 (dielettrico
privo di perdite)
b
c
a
εr
x
• Caratteristiche simili alla microstriscia.
• Il modo dominante è di tipo TM che tende ad un TEM per f → 0 .
• Per frequenze basse la costante di propagazione è β= ω √LC, dove L e C
sono l’induttanza e la capacità per unità di lunghezza, rispettivamente.
• Esiste un modo di propagazione superficiale che ha un campo concentrato in
251
prossimità dell’interfaccia aria-dielettrico.
• Parete elettrica (PE):
n×E = 0
Parete magnetica (PM): n × H = 0
Una PM può essere inserita laddove il campo magnetico tangenziale è nullo
senza disturbare il campo elettromagnetico. Inoltre su una PM n ⋅ E = 0 .
• Assumiamo che, essendo la struttura indefinita lungo l’asse x, il campo TM
sia dipendente da y e z ma non da x.
∂E
∂E
∂E
Poiché Ez = Ez ( y , z ) e
E t ∝ ∇t Ez = x 0 z + y 0 z = y 0 z
∂x
∂y
∂y
si ha: E t = E y y 0 ⇒ H t ∝ z 0 × ∇t Ez = H x x 0
ovvero: H y = 0
Quindi per il modo TM sono diversi da zero solo E y , E z , H x
Si può inserire una PM lungo ogni superficie x=cost. senza alterare il
campo. Assumiamo che siano inserite due PM in x = ±w .
b
-w
y
In questo modo ci riconduciamo ad una
guida d’onda chiusa da PE in y=0,b e da PM
in x = ±w .
+w
x
252
• Poiché il modo si propaga parte in aria e parte nel vuoto ci aspettiamo un
valore di β z compreso fra quello che assumerebbe nel vuoto e quello in un
dielettrico indefinito di costante dielettrica ε r:
ω µ 0ε 0 < β z < ω µ 0ε 0ε r
• Studiamo l’andamento di Ez(y,z):
Ez ( y , z ) = Ce − kz z ez ( y )
2
∂
∇t2ez = kt2ez ⇒ 2 ez = kt2ez
∂y
k 2 = −ω 2 µ0ε 0ε r ,
2
2
k
−
k
z
kt2 = 02
2
k
−
k
z
nell ' aria
nel dielettrico
k0 = −ω 2 µ0ε 0
2
• Poiché il campo elettrico tangenziale e quello magnetico tangenziale si
devono conservare, all’interfaccia la costante kz deve essere la stessa.
253
• Poniamo:
jl nel dielettrico
kt =
jp nell’aria
essendo:
⇒ k02 + p 2 = k 2 + l 2
k z2 = k02 − kt2 = k02 + p 2 = k 2 + l 2
l 2 − p 2 = k02 − k 2 = (1 − ε r ) k02
• Dobbiamo risolvere:
d 2ez
2
+
l
ez
2
dy
0≤y ≤a
d 2ez
2
+
p
ez
2
dy
a≤y ≤b
con le condizioni al contorno:
ez ( y ) = 0
in y=0,b
ez (a − ) = ez (a + )
ε r ∂ez
l
2
∂y
y =a−
continuità campo elettrico tangenziale
1 ∂ez
= 2
p ∂y
continuità campo magnetico tangenziale
y =a +
254
• Espressioni complete delle componenti trasverse:
Ey =
k z ∂ez − kz z
e
2
kt ∂y
Hx x 0 =
kz 1
∂ez
k z ∂ez
jωε C
z
×
∇
e
=
z
×
y
=
−
x
Y
0
0
0 TM
t z
0
kt2
ZTM kt2
∂y
kt2 ∂y
⇒ H x = −YTM
k z ∂ez − kz z
e
2
kt ∂y
Quindi avremo:
k z ∂ez nel dielettrico
l 2 ∂y
ey =
k z ∂ez nell’aria
p 2 ∂y
jωε 0ε r ∂ez
j ε r k0Y0 ∂ez
jωεC k z ∂ez
−
=
−
=
−
2
2
k k 2 ∂y
l
∂
y
l
∂y
z
t
hx =
jk Y ∂e
nell’aria
− 02 0 z
p ∂y
nel dielettrico
255
• L’impedenza d’onda ( tale che e t = Zh t × z 0 ) è diversa nelle due regioni.
• Risolvendo le eq. differenziali per ez(y) nelle due regioni si ha:
C1 sin(ly )
ez ( y ) =
C2 sin [ p(b − y )]
0≤y ≤a
a≤y ≤b
C1,C2 costanti
• Continuità campo elettrico:
C1 sin( la ) = C2 sin [ p(b − a )] = C2 sin( pc )
(posto c = b − a )
• Continuità campo magnetico:
εr
1
C
l
cos(
la
)
=
C2 p [ − cos( pc )]
1
2
2
l
p
ε
1
⇒ r C1 cos(la ) = − C2 cos( pc )
l
p
256
⇒ l tan(la ) = −ε r p tan( pc )
Questa equazione va risolta assieme alla
l 2 − p 2 = (1 − ε r ) k02
Si ottiene un’infinità di risultati, cioè ∞ modi TM si possono propagare.
• Poiché
k z = k02 + p 2 = k 2 + l 2 = −ω 2 µ0 ε 0 + p 2 = −ω 2 µ0ε r ε 0 + l 2
per valori di p e l crescenti si ottengono modi che non si propagano, infatti per
p > ω µ0 ε 0
kz è puramente reale ed il campo si attenua esponenzialmente lungo z, cioè non
si propaga.
• Ricordiamo che k z = α z + j β z
257
Per un modo propagante nella struttura senza perdite (ideale) deve essere
α z = 0 ⇒ j β z = −ω 2 µ0ε 0 + p 2 = −ω 2 µ0ε r ε 0 + l 2
•Perché si abbia
ω µ 0ε 0 < β z < ω µ 0ε 0ε r
dovremo ammettere la possibilità che p sia immaginario, ad esempio p=jp0 con
p0 reale.
Indicando con l0 il valore corrispondente di l abbiamo:
l 0 tan( l 0a ) = ε r p0 tanh( p0c )
2
2
2
2
+
=
−
=
−
l
p
1
ε
k
ε
1
ω
µ 0ε 0
(
)
(
)
0
r
0
r
0
258
Soluzione a bassa frequenza:
Se f è piccola
k0 è molto piccolo (es.: f=1MHz
k0 =0.02094 rad/m)
l0 e p0 piccoli.
Assumiamo poi che b sia limitato a pochi centimetri
anche l0a e p0c piccoli.
Perciò:
ɶ l 0 2a = ε r p0 2c
l 0 tan( l 0a ) = ε r p0 tanh( p0c ) ⇒
Dalla l 02 + p02 = ( ε r − 1) ω 2 µ0ε 0 segue che:
2
ε
−
1
a
ω
µ 0ε 0
(
)
r
2
p =
0
Per βz abbiamo, quindi:
a + εr c
β z = − j −1 ω 2 µ0ε 0 + p02 = ω 2 µ0ε 0 + p02 =
= ω 2 µ 0ε 0
ε r − 1) aω 2 µ0ε 0
(
+
a + εr c
= ω µ 0ε 0
εr b
= ω µ 0ε 0 ε e
a + εr c
def: εe costante dielettrica efficace
259
Calcoliamo, in situazione statica, la capacità C per unità di lunghezza e
l’induttanza L per unità di lunghezza.
y
Jz
-w
z
0
+w
x
Sulla superficie interna del conduttore superiore:
n × H = J ⇒ −y 0 × H x x 0 = Jz z0 ⇒ H x z0 = Jz z0
⇒ H x = Jz
260
L’energia magnetica immagazzinata per unità di lunghezza è pari a (vedremo
fra poco che Hx non dipende da x e da y in questo caso):
Wm =
che deve coincidere con:
La corrente è:
Si ottiene quindi:
µ0
4
b +w
∫∫
H x dxdy =
2
0 −w
µ0
2
wbJ z
2
1 2
LΙ z
4
Ι z = 2wJ z
L=
µ0 b
2w
261
La capacità C per unità di lunghezza è la serie di:
a) capacità di un condensatore a piatti paralleli di lunghezza unitaria,
larghezza 2w, altezza a, riempito di dielettrico
e
b) capacità di un analogo condensatore di altezza c, riempito di aria.
Quindi:
C = Cd // Ca
con:
Cd =
ε r ε 0 2w
a
ε 0 2w
Cd =
c
CC
2w ε r ε 0
⇒C = a d =
Ca + Cd ε r c + a
Dalle espressioni ricavate per L e C segue che:
ω LC = ω
ε r ε 0 µ0 b
≡ βz,
εr c + a
c.v .d .
262
Continuità di ez per y=a:
C1 sin(l 0a ) = C2 j sinh p0c
per piccoli valori di l0a e p0c:
C1 sin(l 0a )
l 0a
C2 =
≅ − jC1
j sinh p0c
p0c
Campi e.m. per a≤y≤b :
ez ≅ C1l 0 y
kz
j βz
∂ez
βz
et = 2 ∇ t ez =
y0
= −j
C1 y 0
2
kt
−l 0
∂y
l0
ht = j
ωε c
k
2
t
z 0 × ∇t ez = x 0 jY0ω µ0ε 0
εr
l0
(ex = 0)
C1
263
Campi e.m. per a≤y≤b : (aria)
l 0a
l 0a
ez ≅ C2 p(b − y ) = C2 jp0 (b − y ) = − jC1
jp0 (b − y ) = C1
(b − y )
p0 b
b
β z l 0a
j β z ∂ez
ey ≅
= − j 2 C1
p0 ∂y
p0 c
x 0 hx ≅ j
ωε c
2
0
p
z 0 × ∇t ez = − x 0 j
ωε 0 ∂ez
p02 ∂y
jω µ0ε 0Y0
l 0a
l 0aε r
Y0ε r
ω
µ
⇒ hx ≅ −
−
C
=
j
Y
C
=
j
ε
C1
ω
µ
ε
1
0 0 0
1
0 0
2
2
p0
c
l0 a
l0
264
Nel limite di bassa frequenza (ω → 0 ):
poiché: kt2 = β z2 − ω 2 µ0ε 0
ω µ 0ε 0 < β z < ω µ 0ε 0ε r
e:
ω →0
ω 2 µ0ε 0 → 0
2
⇒
k
t
β → 0
z
→0
l nel dielettrico
p in aria
inoltre:
p in aria
⇒ ez → 0!
ez ∝
l nel dielettrico
265
Il modo TM diventa quasi TEM! Invece ey e hx rimangono costanti.
Calcolo la tensione V fra il conduttore piano superiore e quello inferiore:
0
b
a
b
b
0
0
a
V = ∫ ey dy = − ∫ ey dy = − ∫ ey dy − ∫ ey dy = − j
βz
l0
C1 ( a + ε r c )
inoltre:
l0 =
ε r p02c
a
=
ω µ0ε 0 ε r ( ε r − 1) c
a + εr c
εr b
βz =
ω µ 0ε 0
a + εr c
⇒ V = jC1
b
(a + εr c )
(ε r − 1) c
La corrente totale sul conduttore superiore è pari a:
Ι z = 2wJ z = 2wH x ≅ 2whx
infatti siamo nel caso βz ≅ 0.
266
E’ quindi possibile definire l’impedenza caratteristica della linea di
trasmissione associata al modo di propagazione come:
V
V
Z
Zc = =
= 0
Ι z 2whx 2w
(ε r c + a ) b
εr
≡
L
C
• Nel limite di bassa frequenza ho:
- modo di propagazione quasi-TEM (ez ≅ 0, non esattamente =0)
- costante di propagazione e impedenza caratteristica determinate da
induttanza e capacità distribuite statiche.
267
Soluzione ad alta frequenza:
ω µ 0ε 0 , l0 e p0 sono grandi
tanh (p0c) ≅ 1
e quindi:
l 0 tan( l 0a ) = ε r p0 tanh( p0c ) ≃ ε r p0 = ε r
(ε r − 1) ω 2 µ0ε 0 − l02
equazione indipendente dalla distanza b fra i piatti paralleli
Riprendiamo le soluzioni già trovate per ez(y):
C1 sin( ly )
ez ( y ) =
C2 sinh [ p( b − y )]
0≤y ≤a
a≤y ≤b
Dalla continuità per y=a si ottiene:
C2 = − j
C1 sin(l 0a )
sinh p0 (b − a )
268
Inserendo l’espressione di C2 in quella di ez(y) per a≤y≤b si ha:
ez ( y ) = C1 sin( l 0a )
sinh [ p0 ( b − y )]
sinh [ p0 ( b − a )]
Poiché siamo nel limite di p0 grandi:
e p0 ( b − y )
ez ( y ) ≅ C1 sin(l 0a ) p0 ( b −a ) = C1 sin(l 0a )e − p0 ( y −a )
e
Quindi ez(z) decade in modo esponenziale dall’interfaccia aria dielettrico e non
dipende da b, purché p0c= p0(b-a) sia grande.
Questo campo è guidato dall’interfaccia aria-dielettrico anche se il conduttore
superiore è portato all’infinito. E’ un modo superficiale perché il suo campo è
confinato in prossimità della superficie guidante.
ez
a
y
269
Per analizzare le proprietà di propagazione dei modi dobbiamo risolvere
l’equazione agli autovalori, già trovata:
l 0 tan( l 0a ) = ε r
La prima soluzione per l0 si ha per:
π
l 0a <
2
(ε r − 1) ω 2 µ0ε 0 − l02
cioè:
l0 <
π
2a
Nella regione delle alte frequenze, quindi, l0 rimane limitato mentre ω µ 0ε 0
2
e p0 sono molto grandi (si ricordi che p0 = ( ε r − 1) ω 2 µ0ε 0 − l 02 ). Avremo
inoltre:
ω 2 µ 0ε 0ε r > ω 2 µ 0ε 0 >> l 02
ricordando che
j β z = −ω 2 µ 0ε 0ε r + l 2 = −ω 2 µ 0ε 0ε r − l 02 ≅ −ω 2 µ 0ε 0ε r
si ottiene
β z ≅ ω µ 0ε 0ε r
270
Quindi passando dalle basse alle alte frequenze β z varia da
a ε r ω µ 0ε 0 .
Risolvendo per ogni frequenza le equazioni:
ε e ω µ 0ε 0
l 0 tan(l 0a ) = ε r p0 tanh ( p0c )
2
2
2
l 0 + p0 = ( ε r − 1) ω µ0ε 0
si può costruire la curva mostrata in figura che fornisce l’andamento della
costante dielettrica efficace in funzione della frequenza:
εe
(valore a
frequenze elevate)
εr
εr b
ω µ 0ε 0
a + εr c
(valore statico) 0
10
20
30 f [GHz]
271
Naturalmente per valori crescenti di l0a si ottengono altri modi superficiali di
propagazione. Oltre a tali modi ci sono quelli “non superficiali” che si
ottengono per valori di p reali.
Analogamente anche i modi TE si dividono in superficiali e non. Per a → 0
ci si riconduce al caso di guida a piatti paralleli con un solo dielettrico nella
quale si propagano modi TEM, TM, TE.
Il caso di guida a piatti paralleli si può considerare come un caso particolare di
guida rettangolare quando il lato a della guida si estende all’infinito.
Si deve inoltre tener conto del fatto che, in tal caso, il modo TM0 coincide con
quello TEM.
272
Microonde - Campi e.m. nelle strutture guidanti
Linea di trasmissione a microstriscia
substrato
piano di massa
Linea di trasmissione a
microstriscia
modo quasi-TEM
Linea a piatti paralleli
(due dielettrici)
Cavo coassiale
Linea a piatti
paralleli
(un solo dielettrico)
modo TEM puro
273
• A frequenze “basse” (fino a qualche GHz, di solito) si propaga un modo
quasi-TEM.
• Fino a circa 1 GHz la microstriscia può essere caratterizzata tramite la
capacità e l’induttanza distribuite, analogamente alla guida d’onda a piatti
paralleli con due dielettrici. Non è, però, possibile ricavare formule analitiche
semplici per questi parametri, in generale, ed anche l’analisi statica non è
molto semplice. Si possono ricavare soluzioni formali da risolvere con metodi
numerici.
• Bassa frequenza si riferisce al rapporto fra le dimensioni lineari e la
lunghezza d’onda. Questo rapporto stabilisce la regione per la quale la
microstriscia può essere studiata in maniera adeguata usando il modo quasiTEM. Nei Microwave Integrated Circuits (MIC) con larghezza del conduttore
superiore di circa 100 µ, la larghezza della regione a “bassa frequenza” si può
estendere fino a 20÷30 GHz.
274
Formule pratiche per la costante dielettrica efficace, l’impedenza
caratteristica e l’attenuazione:
εe ≅
εr + 1 εr − 1
2
+
2
1
H
1 + 12
w
60 8H
w
w
ln
+
≤1
w
4H
H
εe
Z0 ≅
120π
ε e w + 1.393 + 0.667 ln w + 1.444
H
H
w
>1
H
275
Per una assegnata impedenza caratteristica Z0 ed una costante dielettrica ε r il
rapporto w/H è dato da:
8e A
w
≤2
2A
e −2
H
w
≅
H 2
0.61
εr − 1
B − 1 − ln ( 2B − 1) +
ln ( B − 1) + 0.39 −
π
ε
ε
2
r
r
w
>2
H
dove:
A=
Z0 ε r + 1 ε r − 1
0.11
+
0.23
+
60
2
ε r + 1
εr
377π
B=
2Z 0 ε r
276
Attenuazione dovuta a perdite dielettriche:
αd ≅
ω µ 0ε 0 ε r ( ε e − 1) tan δ
2 ε e ( ε r − 1)
Np
m
dove tan δ è la tangente delle perdite del dielettrico.
Attenuazione dovuta a perdite nel conduttore:
αc ≅
Rs
Z 0w
Np
m
dove:
Rs =
ωµ 0
2σ
resistività superficiale del conduttore.
In genere:
α c >> α d
277
Microonde - Campi e.m. nelle strutture guidanti
Linee di trasmissione e modi di propagazione
• Lo studio della propagazione dei modi in una guida d’onda può essere
condotto non solo studiando direttamente le proprietà dei campi
elettromagnetici, a partire dalle equazioni di Maxwell, ma anche tramite
l’associazione di ciascun modo con una linea di trasmissione appropriata.
• Linea di trasmissione:
modello matematico, basato su equazioni differenziali, che lega due funzioni
di variabile reale: tensione V(z) e corrente I(z) che, in generale, non hanno
significato fisico.
I(z)
I(z)+dI
V(z)+dV
V(z)
z
z+dz
278
• Le equazioni differenziali, dette dei telegrafisti o delle linee di trasmissione,
che legano V e I sono:
dV
dz = −Z Ι
d Ι = −YV
dz
dove Z e Y sono, rispettivamente, l’impedenza e l’ammettenza per unità di
lunghezza della linea e sono dette costanti primarie della linea.
Queste equazioni furono ricavate per lo studio delle linee bifilari,
successivamente si capì che erano utilizzabili anche per lo studio della
propagazione in altre strutture.
• La propagazione in una linea di trasmissione può essere studiata facendo
uso delle costanti primarie oppure delle costanti secondarie, per le quali
valgono le definizioni:
Z
impedenza caratteristica
η=
Y
k z = ZY
costante di propagazione
279
• Abbiamo già visto che i modi TE, TM e TEM che si propagano nelle
strutture guidanti hanno dei campi trasversi che ammettono una
fattorizzazione del seguente tipo:
(
H (q , q , z ) = h (q , q ) ( −P e
E t (q1, q2 , z ) = et (q1, q2 ) P1e kz z + P2e − kz z
t
1
2
t
1
2
1
kz z
)
+ P2e − kz z
)
• Inoltre abbiamo introdotto l’impedenza d’onda η z tramite la quale abbiamo
espresso il legame fra et e ht:
e t = ηz h t × z 0
ηz [TE ]
jωµ
=
,
kz
ηz [TM ]
kz
=
,
jωε
ηz [TEM ]
µ
=
ε
• Vale, inoltre, la relazione di separabilità o di dispersione:
k z2 + kt2 = −ω 2 µε
280
• Se le strutture guidanti sono prive di perdite, ovvero hanno conduttore e
dielettrico perfetti, si ha:
kt2 reale e negativo
• Di conseguenza, in assenza di perdite, la costante kz può essere:
attenuazione senza propagazione (sotto cut-off )
reale
kz
propagazione (sopra cut-off )
immaginaria
• Se la struttura è priva di perdite et e ht sono o entrambi reali o entrambi
immaginari.
• et e ht soluzioni di equazioni differenziali omogenee possono essere
normalizzati in maniera arbitraria. La determinazione del coefficiente di
proporzionalità può essere fatta se si considera l’eccitazione della guida.
Trattando la guida solo in propagazione rimane l’arbitrarietà.
281
• Le proprietà del campo elettromagnetico, come abbiamo visto, sono
espresse tramite due funzioni: una dipende dalle variabili trasverse e non ci
interessa in questo argomento, l’altra dipende dalla variabile longitudinale.
Questa dipendenza può essere descritta con il modello delle L.d.T.?
• Introduciamo due costanti arbitrarie Ke e Kh e poniamo:
1
kz z
− kz z
E t (q1, q2 , z ) = K e P1e + P2e
et (q1, q2 )
Ke
(
(
H t (q1, q2 , z ) = K h −P1e
(
V ( z ) = K e P1e kz z + P2e − kz z
)
)
kz z
+ P2e
− kz z
)
1
ht (q1, q2 )
Kh
(
Ι( z ) = K h −P1e kz z + P2e − kz z
)
• Deriviamo le ultime due relazioni:
dV
Ι( z )
= K e k z P1e kz z − P2e − kz z = −K e k z
dz
Kh
(
)
dΙ
V (z)
= K h k z −P1e kz z − P2e − kz z = −K h k z
dz
Ke
(
)
282
• Se, a questo punto, poniamo:
Kekz
=Z
Kh
Khkz
=Y
Ke
otteniamo le equazioni:
dV
dz = −Z Ι
d Ι = −YV
dz
cioè proprio le equazioni delle L.d.T.
• Ke e Kh non sono indipendenti, infatti:
Ke Z
=
=
Kh kz
Z
Z
=
=η
Y
ZY
283
• Rimane da verificare che il trasferimento di potenza lungo la linea e quello
del modo generico siano uguali.
- Linee di trasmissione:
potenza trasmessa in una generica sezione:
1
P = V Ι∗
2
- Struttura guidante:
potenza trasmessa in una generica sezione S:
1
∗
P = ∫ E t × H t ⋅ z 0dS
2S
Dalle posizioni fatte in precedenza si ha:
V (z)
Et =
et
Ke
Ι( z )
Ht =
ht
Kh
284
Sostituendo:
1 V ( z ) Ι( z )∗
∗
P=
e
h
×
t ⋅ z 0 dS
∗ ∫ t
2 Ke Kh S
Per avere una corretta corrispondenza fra i due metodi dovrà risultare, perciò:
∗
∫ et × ht ⋅ z0dS = KeK h
∗
S
Di conseguenza Ke e Kh non sono entrambe arbitrarie: lo è solo una. Inoltre et
e ht sono determinate a meno di costanti, quindi la quantità:
∗
∫ et × ht ⋅ z0dS
S
può essere normalizzata come si vuole.
Poniamo, allora:
(
)
∫ et × ht ⋅ z0dS = ηz ∫ ( ht × z0 ) ⋅ ht × z0 dS =
∗
S
S
∗
∗
= ηz ∫ ht ⋅ ht dS = e j 2ϕ
S
285
Ovvero:
ηz ⋅ ht ⋅ ht ∗dS = 1
∫S
∠ηz = 2ϕ
Poiché per ogni modo η z è noto
ϕ è noto!
L’associazione dei modelli è quindi corretta se:
K h = η −1/ 2
K e = η K h
⇒
1/ 2
η
K e K h = 1
K
=
e
per i moduli
Ke
K = η
h
K K ∗ = e j 2ϕ
e h
∠K e − ∠K h = ∠η
⇒ ∠η = 2ϕ ≡ ∠ηz
∠K e − ∠K h = 2ϕ
per le fasi
Una delle due fasi ∠K e e ∠K h è arbitraria; se scegliamo:
∠K e = ϕ ⇒ ∠K h = −ϕ
286
In conclusione:
K e = η 1/ 2 e jϕ = η1/ 2
−1/ 2 − jϕ
e = η −1/ 2
K h = η
V ( z ) = η1/ 2 P1e kz z + P2e − kz z
−1/ 2
−P1e kz z + P2e − kz z
Ι( z ) = η
(
(
)
)
E t (q1, q2 , z ) = η −1/ 2V ( z )et (q1, q2 )
1/ 2
H t (q1, q2 , z ) = η Ι( z )ht (q1, q2 )
Kekz
Z
= ηk z
=
Kh
Y = K h k z = 1 k
z
η
Ke
Rimane solo l’arbitrarietà sul |η|. Scegliendo tale valore abbiamo più
formulazioni.
287
I formulazione:
η = ηz ⇒ η = ηz
e la linea equivalente ha tensione e corrente:
(
(
)
)
V ( z ) = ηz1/ 2 P1e kz z + P2e − kz z
−1/ 2
η
Ι
(
z
)
=
−P1e kz z + P2e − kz z
z
con:
Z = ηz k z
1
Y
=
kz
ηz
II formulazione:
η = 1 ⇒ η = e j 2ϕ
Z = e j 2ϕ k z
2ϕ = ∠η = ∠ηz
Y = e − j 2ϕ k z
288
La teoria sviluppata vale:
in strutture ideali prive di perdite
a.
a1. in propagazione
(κz=βz)
a2. in attenuazione
(kz=αz)
b.
in strutture con perdite solo dielettriche (kz= αz+jβz) ma con
conduttore perfetto.
Conclusione
La propagazione di un modo guidato può essere studiata tramite una linea
equivalente tale che:
1)
la costante di propagazione della linea è uguale a quella del modo
considerato
2)
la fase dell’impedenza caratteristica della linea è uguale alla fase
dell’impedenza d’onda del modo considerato
3)
il modulo dell’impedenza caratteristica può essere fissato a piacere
la linea associata non è unica!
289
Specializziamo i risultati precedenti ai vari modi.
Modo TM:
ηz =
• Scegliendo
kz
jωε c
η = ηz ⇒ η = ηz
kz
k 2 − kt
ω c2 µε
⇒ Z = η k z = ηz k z =
=
= jωµ +
jωε c
jωε c
j ωε c
2
2
ωc: pulsazione di cut-off del modo considerato
jωεc=g+jωε
ω c2 µε
⇒ Z = jωµ +
= jωµ +
g + jωε
Y=
kz
η
=
kz
ηz
1
g
ωc2 µε
= jωε c = g + jωε
+
jωε
ωc2 µε
290
Circuito equivalente (di lunghezza infinitesima, ovvero di tipo distribuito):
ω c2 µε
dz
g
µ dz
1
ω µ
2
c
dz
1
dz
g
dz
ε dz
291
Se il dielettrico è perfetto il circuito equivalente diventa:
µ dz
1
ω µ
2
c
dz
ε dz
292
• Scegliendo
η =1
Z = e j 2ϕ jωε cηz
⇒
− j 2ϕ
Y
=
e
jωε cηz
Rappresentazione circuitale utile solo per g=0 e ω >ωc, cioè dielettrico senza
perdite e modo in propagazione.
In tal caso:
ωc
k z = jω µε 1 − = j β z
ω
2
Z = e j 2ϕ j β z
⇒
− j 2ϕ
Y
e
j βz
=
ηz =
βz
ωε
è reale ⇒ ϕ = 0
Z = j β z
⇒
Y = j β z
293
Circuito equivalente:
ωc
β z dz = ω dz µε 1 −
ω
2
ω
β z dz = ω dz µε 1 − c
ω
2
i parametri sono dipendenti dalla frequenza, al contrario dei parametri del caso
precedente.
294
Modo TE:
ηz =
jωµ
kz
• Scegliendo
η = ηz
⇒ η = ηz
⇒ Z = ηk z = ηz k z = jωµ
k 2 − kt
jωε c jωµ + ω c2 µε
kz
Y=
=
=
=
=
=
η ηz jωµ
jωµ
jωµ
kz
kz
2
2
= g + jωε +
1
jω
ωc2ε
295
Circuito equivalente:
µ dz
1
dz
g
1
ω ε
2
c
ε dz
dz
dz
296
Se il dielettrico è perfetto il circuito equivalente diventa:
µ dz
1
ω ε
2
c
dz
ε dz
• Scegliendo
η =1
si ottengono le stesse espressioni del modo TM.
297
Modo TEM:
ηz =
µ
ε
kt = 0 ⇒ k z2 = k 2 = −ω 2 µε
• Scegliendo
η = ηz ⇒ η = ηz
µ
µ
⇒ Z = ηk z =
kz =
jω µε = jωµ
ε
ε
Y =
1
η
kz =
jω µε
µ /ε
= j ωε
Circuito equivalente:
µ
ε
298
• Scegliendo
Z = η k z = k z = k = j ω µε
η = 1⇒
1
Y
=
k z = jω µε
η
Circuito equivalente:
µε
µε
• Per il modo TEM in entrambe le formulazioni i parametri circuitali sono non
dispersivi (non variano con la frequenza).
• Per il modo TEM il circuito equivalente è lo stesso per ogni struttura. Al
contrario, per i modi TE e TM, tramite la frequenza di cut-off, cioè l’autovalore
e di conseguenza le condizioni al contorno, i parametri del circuito equivalente
299
variano da un modo all’altro e da una struttura all’altra.
• Nel caso dei modi TEM è possibile far ricorso ad una III formulazione che
permette, al contrario di quanto accade per i modi TE e TM, di dare un
significato fisico diretto alle funzioni V(z) e I(z). In particolare V(z) è la
tensione fra i due conduttori e I(z) è la corrente che percorre un conduttore
(nell’altro scorre in verso opposto).
Per le onde TEM:
∇ ϕ =0
2
t
et = −∇tϕ
ht =
1
ηz
z 0 × et
µ
ηz =
ε
t0
s0
1
2
1 e 2 siano i due conduttori della struttura guidante. L’integrale di linea tra di
essi è indipendente dal cammino scelto ed è pari alla differenza di potenziale
300
fra essi.
∂ϕ
V = ∫ et ⋅ s 0ds = − ∫
ds =ϕ1 − ϕ 2
∂s
1
1
2
2
Inoltre la circuitazione del campo magnetico su una linea, che prendiamo
coincidente con quella che delimita il cavo che circonda un conduttore, è pari
alla corrente che scorre nel conduttore stesso:
n entrante
Ι = ∫ t 0 ⋅ ht dt =
1
=−
1
ηz
1
ηz
∫ t 0 ⋅ z0 × et dt =
1
∫ n ⋅ ∇ϕ dt = −
1
1
ηz
∫ t
0
× z 0 ⋅ et dt =
1
∂ϕ
dt
∫
ηz 1 ∂n
1
L’impedenza caratteristica è, in questo caso, definita come il rapporto tra la
differenza di potenziale fra i conduttori e la corrente che li percorre, cioè:
∂ϕ
ds
∫
∂s
ϕ −ϕ
η = 1 2 = ηz 1
=
∂ϕ
Ι
∫ ∂n dt
1
2
∂ϕ
ds
∫
µ 1 ∂s
ε ∂ϕ dt
∫ ∂n
1
2
301
In questa formulazione interviene la geometria della struttura (negli integrali
che intervengono nella definizione di η), al contrario di quanto accade nelle
altre due formulazioni già viste per il modo TEM.
Riepilogando in questa formulazione:
η=
ϕ1 − ϕ 2
(k z = jω µε )
Ι
∂ϕ
∫1 ∂s ds
Z = ηk z = jωµ
∂ϕ
∫ ∂n dt
1
2
Y=
1
η
k z = jωε
∂ϕ
∫ ∂n dt
1
∂ϕ
∫1 ∂s ds
2
ϕ1,ϕ 2 , Ι sono funzioni di z.
Nel caso in cui è presente la sola onda progressiva si ottiene una impedenza
caratteristica η che non dipende da z, come deve essere per una L.d.T.
Se c’è anche l’onda regressiva la dipendenza da z non si semplifica e la η non
302
è più definibile in questo modo.
Microonde
Analisi di reti a microonde
• Le guide d’onda possono essere utilizzate per collegare trasmettitori,
ricevitori, antenne, …, realizzando una rete o circuito a microonde.
• Circuito a microonde: è costituito da tratti di guida d’onda cilindrica che
collegano regioni in cui confluiscono più guide, chiamate giunzioni a
microonde.
• Le onde che si propagano nelle guide vedono le giunzioni come delle
discontinuità nella geometria cilindrica. Le discontinuità eccitano un grande
numero di modi (in generale infiniti): alcuni si possono propagare, gli altri si
attenuano.
303
• Spostandosi all’indietro ad una distanza sufficiente dalla giunzione, i modi
attenuati (cioè sotto cut-off) danno un apporto trascurabile al campo in
guida. Scegliamo, su ogni guida, una sezione trasversa di riferimento nella
quale il campo può essere espresso come somma dei modi non attenuati.
• Ciascuna guida che accede alla giunzione, corrisponde ad una bocca della
giunzione se, alla frequenza di lavoro, in essa può propagarsi il solo modo
fondamentale; altrimenti corrisponde ad un numero di bocche pari al numero
dei modi non attenuati. Poiché nelle applicazioni pratiche si usano spesso
guide nelle quali si propaga il solo modo fondamentale, facciamo riferimento
a questo caso.
• Si utilizza la rappresentazione dei modi di propagazione tramite le linee di
trasmissione
facendo riferimento ad un circuito a n bocche, lo studio
consiste nel determinare le relazioni fra le tensioni e le correnti alle n bocche.
304
• Giunzione a n bocche: regione di spazio di volume τ limitata da una
superficie perfettamente conduttrice (che comprende anche i tratti iniziali delle
pareti delle N guide d’onda, fino alle sezioni di riferimento). Nel volume τ
siano contenuti mezzi lineari dissipativi o non dissipativi, ma non ci siano
sorgenti: ci riferiamo a giunzioni passive.
Le correnti si considerano
positive nel verso entrante:
I
V
+
_
bocca generica
305
• Teorema di unicità (dominio della frequenza):
il campo e.m. in τ è determinato se è noto il campo elettrico, o
il campo magnetico, sulla superficie che limita τ. Poiché il
campo elettrico tangenziale è nullo ovunque, tranne sulle
sezioni di riferimento delle
strutture guidanti, il campo e.m. in tutta la giunzione è determinato
univocamente se è nota la componente tangenziale (cioè trasversa)
del campo elettrico, o del campo magnetico, sulle sezioni di
riferimento.
306
• D’altra parte, noto Et , si può ricavare facilmente Ht; inoltre nel ricavare le
linee di trasmissione equivalenti abbiamo visto che ad Et si associa V(z) e ad Ht
si associa I(z). Perciò sì può fare riferimento alle tensioni o alle correnti sulle
sezioni di riferimento, per studiare la giunzione.
• In virtù della linearità delle eq. Di Maxwell e del mezzo contenuto nelle
struttura possiamo scrivere :
I1 = Y11V1 + Y12V2 +…….+Y1nVn
I2 = Y21V1 + Y22V2 +…….+Y2nVn
…
In = Yn1V1 + Yn2V2 +…….+YnnVn
Ovvero:
[I] = [Y][V]
con [I] e [V] vettori colonna che rappresentano le correnti entranti e le
tensioni, rispettivamente, mentre [Y] prende il nome di matrice di ammettenza.
307
• La [Y] è univocamente determinata purché siano fissati η e i piani di
riferimento. Spostando i piani di riferimento cambiano i valori degli Yij.
• L’elemento Yij è tale per cui :
Ii
Yij =
Vj
V1 =V2 =....= Vj−1 = Vj+1 =...= Vn =0
cioè è pari al rapporto fra Ii e Vj quando tutte le bocche, tranne la j-esima,
sono chiuse in corto circuito. In particolare se i=j :
Ii
Yii =
Vi
V1=....= Vj−1 =Vj+1 =...=Vn =0
è l’ammettenza d’ingresso alla bocca i quando tutte le altre sono chiuse in
corto circuito.
Chiudere in corto circuito : Et=0
Le altre bocche devono essere chiuse
con piani metallici perfettamente conduttori
308
• In modo analogo, assegnate le correnti:
V1 = Z11I1 +…… + Z1nIn
...
V1n = Zn1I1 +…… + ZnnIn
Vi
ovvero [V] = [Z] [I], e Zij =
Ij
I1=...=I j−1 =I j+1 =...= In =0
In particolare, se j=i, Zii è l’impedenza d’ingresso alla bocca i quando
tutte le altre bocche hanno corrente nulla, ovvero sono chiuse su un circuito
aperto ideale (o su una parete magnetica perfetta : Ht = 0).
• La misura dei parametri Yij e Zij non è affatto semplice. Infatti, per i primi si
devono chiudere in corto circuito tutte le porte tranne quella alla quale è
collegato il generatore: ciò può portare ad elevate potenze riflesse sul
generatore stesso con una notevole degradazione della qualità di
funzionamento. Per quanto riguarda i secondi, non è facile realizzare una
condizione di circuito aperto ideale: parte dell’energia fuoriesce sempre da
309
una guida aperta.
Si introduce perciò un’altra rappresentazione detta della matrice di
scattering [S]. Si fa riferimento alle tensioni incidenti e riflesse alle varie
bocche, ad esempio alla bocca j-esima :
Vj(z) = Vji(z) + Vjr(z) = Vj+(z) + Vj-(z) ;
Note le Vj+(j = 1,…,n)
V1 −
V2−
.
.
Vn −
S11
S
21
=
⋮
Sn1
Vj- (j = 1,…,n)
…
⋱
⋯
Sij =
S1n
S2n
⋮
Snn
V1 +
V2+
.
.
Vn +
o
[V-] = [S] [V+]
Vi −
Vj+
V1+ =...= Vj−1+ = Vj+1+ =...=Vn + =0
310
Inviando alla porta j-esima l’onda di tensione progressiva Vj+, si riceve alla
bocca i-esima l’onda regressiva Vi- = Sij Vj+ se tutte le rimanenti bocche
sono adattate, ovvero terminate su carichi adattati.
La valutazione sperimentale di Sij si fa, quindi, misurando Vi- mentre si
pilota la porta j-esima con la tensione Vj+ di un generatore che operi alla
frequenza voluta, quando le altre bocche sono adattate.
• Vediamo ora i legami che esistono fra le varie rappresentazioni:
[V] = [Z] [I]
(1)
[I] = [Y] [V]
(2)
[V-] = [S] [V+]
(3)
311
• Ricordiamoci che :
[A] [B]
≠ [B] [A]
no proprietà commutativa
([A] [B]) [C] = [A] ([B] [C]) si proprietà associativa
([A] [B])T= [B]T [A]T
matrice trasposta
([A]-1)T = ([A]T)-1
1 … 0
e, naturalmente: [A]-1[A] = [1] = ⋮ ⋱ ⋮
0 ⋯ 1
• Dalla (1) : [Z]-1 [V] = [I]
Confrontando con la (2): [Z]-1 = [Y] .
312
• Cerchiamo un legame fra [Z] ed [S] :
[V] = [V+] + [V-]
[I] = [I+] + [I-] = [η]-1([V+] -[V-])
([η] è diagonale)
o [η] [I] = [V+] -[V-]
(somma)
2[V+] = [V] +[η] [I]
(diff.)
2[V-] = [V] - [η] [I], poiché [V] = [Z] [I+]
2[V+] = ([Z] + [η]) [I]
2[V-] = ([Z] - [η]) [I], ma [V-] = [S] [V+]
([Z] - [η]) = [S] ([Z] + [η]) , ovvero
[S] = ([Z] – [η] ) ([Z] + [η])-1.
313
PROPRIETA DELLE MATRICI PER RETI A MICROONDE.
• Se il mezzo contenuto nella giunzione è passivo e isotropo (non è una
ferrite, un plasma, né un mezzo attivo…), è facile dimostrare che la matrice
[Z] è simmetrica.
Si considerino presenti all’interno della rete due campi e.m. generati
all’esterno della giunzione stessa. Tutte le porte siano chiuse in corto
circuito ad eccezione di 2: la n.ro 1 e la n.ro 2.
Poiché non ci sono sorgenti all’interno del circuito, dal teorema di
reciprocità di Lorentz abbiamo:
∫S (Ei × H j − E j × Hi ) ⋅ nds = 0.
(*)
Scegliamo S coincidente con le pareti conduttrici della giunzione e gli h
piani terminali. L’integrale sulle pareti conduttrici è nullo se si tratta di un
conduttore perfetto o avente conducibilità finita.
314
A) conduttore perfetto
( Ei ×Hj) · n = (n × Ei) · Hj ma sulla PEP n × Ei = 0
(Ej × Hi ) · n = (n × Ej) · Hi ma sulla PEP n × Ej = 0
Integrale nullo sulle PEP.
B) conduttore reale
all’interno di S sulle pareti metalliche:
Et = - Zm n × H , ovvero n × E = - Zm n × (n H)
(n uscente , come nell’eq. (*) )
( n × Ei ) · Hj - ( n × Ej ) ·Hi = - Zm[ n × ( n × Hi ) ] · Hj +
+ Zm[n × ( n × Hj )] · Hi = - Zm( n · Hi ) ( n · Hj ) +
+ Zm( n · Hj )( n · Hi ) = 0
Integrale nullo su pareti metalliche
reali.
315
La (*) diventa, perciò, indicando le sezioni di riferimento con Sk
n
∑ ∫Sk (Ei × H j − E j × Hi ) ⋅ ndSk = 0
k =1
Nel nostro caso , però, ( n × Ei )porta k = (n × Ej )porta k = 0 se k ≠ 1,2
quindi abbiamo:
(**)
(Ei × Hj . n = n × Ei .Hj )
∫S1 (Ei × H j − E j × Hi ) ⋅ z01dS1 + ∫S2 (Ei × H j − E j × Hi ) ⋅ z02dS2 = 0
dove n (versore uscente ) è stato sostituito con i versori entranti z01
e z02.
Nel caso di strutture aperte, come la microstriscia, la superficie S può
essere, nelle zone che non corrispondono a conduttori, spostata ad una
distanza sufficientemente grande, in modo che Etan ≅ 0 .
Si torna quindi anche in questo caso alla relazione (**) .
316
Esplicitando i prodotti vettoriali esprimendo i vettori E e H tramite le
componenti trasverse e longitudinali, si vede che gli unici termini non nulli
sono quelli che contengono la parte trasversa dei campi . Quindi la (**)
diventa:
∫S1 (E ti × H tj − E tj × H ti ) ⋅ z01dS1 + ∫S2 (E ti × H tj − E tj × H ti ) ⋅ z02dS2 = 0
• La configurazione del campo in una sezione trasversa rimane la stessa
(autovalori ed autofunzioni sono sempre gli stessi) anche se cambia
l’eccitazione alla porta generica. In tal caso varieranno, invece, V(z) e I(z).
Sappiamo che:
Et(i/j) = et V(z)(i/j)
;
Ht(i/j) = ht I(z) (i/j) .
Si ha, dunque,
(∆ )
V1i I1j ∫ et1 × h t1 ⋅ z 01dS1 − V1jI1i ∫ et1 × h t1 ⋅ z01dS1 +
S1
S1
V2i I 2 j ∫ et2 × h t2 − z 02dS2 − V2 jI 2i ∫ et2 × h t2 ⋅ z 02dS1 = 0
S2
S2
317
Ricordiamoci che, su una sezione S:
∫S et × h t ⋅ z0dS
può essere normalizzato a piacere, in particolare si può porre uguale a 1.
Con questa posizione la potenza trasmessa è pari a:
1
P = V I*
2
Inoltre, in dipendenza del tipo di modo in esame, et e ht sono entrambi
reali o entrambi immaginari (ed in quadratura con le componenti
longitudinali per i modi TE e TM). In definitiva si può porre:
∫S1 et1 × h t1 ⋅ z01dS1 = ∫S2 et 2 × h t2 ⋅z02dS2 =
1 et , ht reali
-1 et , ht imm. puri
L’eq. (∆) diventa, semplicemente:
V1i I1j-V1j I1j+V2i I2j- V2j I2i =0
(♣)
318
Lo schema circuitale che abbiamo scelto (tutte le porte in corto circuito,
tranne la 1 e la 2) può essere trattato tramite la matrice [Y]:
I1 = Y11 V1 + Y12 V2
I2 = Y21 V1 + Y22 V2
Per le due eccitazioni avremo :[Ii] = [Y] [Vi] e [Ij] = [Y] [Vj], sostituendo
nella (♣) :
V1i(Y11 V1j+Y12 V2j) - V1j (Y11 V1i+Y12 V2i)+ V2i (Y21 V1j+Y22 V2j)+
- V2j (Y21 V1i+Y22 V2i) = 0
V1i Y12 V2j-V1j Y12 V2i + V2i Y21 V1j - V2j Y21 V1i = 0
ovvero: Y12 (V1i V2j - V1j V2i ) = Y21 ( V1i V2j - V1j V2i),
poiché le sorgenti i e j sono arbitrarie deve essere : Y12=Y21
319
Le due bocche indicate con 1 e 2 sono del tutto arbitrarie
se il componente è reciproco:
[Y] = [Y]T
cioè la matrice [Y] è simmetrica . Questa proprietà vale qualunque sia il
valore di η.
Inoltre, poiché [Z] = [Y]-1 :
[Z]T =([Y] -1)T=([Y]T) -1=[Y] -1=[Z]
se la struttura è reciproca le matrici [Y] e [Z] sono simmetriche.
Cosa succede per la matrice di scattering [S] ?
Abbiamo ricavato che [S] = ([Z] -[η]) ([Z]+[η]) -1 con η matrice
diagonale.
Operiamo una trasposizione della matrice [S]:
[S] T =([Z]T+[η]T) -1 ([Z]T-[η]T)=([Z]T+[η] ) -1 ([Z]T-[η]),
poiché [η]=[η]T in quanto matrice diagonale.
320
Inseriamo ora l’ipotesi di reciprocità : [Z]T =[Z], quindi [S]T=([Z]+[η]) -1
([Z] -[η]).
Se confronto le espressioni di [S] e [S]T, poiché, in generale, si ha:
[A] [B] ≠[B] [A]
risulta, nel caso più generale:
[S]T ≠[S].
Assumendo che le impedenze caratteristiche di tutte le linee di accesso
siano uguali, ovvero [η]= η [1], si ha che è possibile applicare la proprietà
commutativa (ovvero [A] [B] =[B] [A]) e quindi in questo caso per una
struttura reciproca anche la matrice di scattering è simmetrica: [S]T =[S].
Quindi i valori di [S] dipendono dalla definizione delle impedenze delle
linee di accesso.
321
Esempio:
bocca 1 : cavo coassiale con η 1 = η modo TEM
bocca 2 : guida rettangolare con η 2 = η modo TE10
η 1 ≠ η 2 ovvero [S] non è simmetrica anche se il componente è
reciproco.
È conveniente utilizzare la seconda formulazione: η = 1 per tutte le linee
di accesso.
In alternativa ci si può riferire ai parametri generalizzati di scattering.
322
PARAMETRI GENERALIZZATI DI SCATTERING :
V1+, a1 η 1
V1- , b1
bocca 1
(rete a n bocche)
Vk+, ak η k
Vk- , bk
bocca k
• Rete a n bocche, η k impedenza della bocca k
• Vk+ e Vk- tensioni incidente e riflessa alla bocca k
• Definiamo le ampiezze d’onda in modo alternativo, questo ci consentirà
di ottenere risultati significativi in termini della potenza:
323
ak =
Vk +
ηk
bk =
Vk −
ηk
ak : onda incidente sulla k-esima bocca
bk : onda riflessa dalla k-esima bocca.
Come noto si ha:
ηk (ak +
bk)
1
1
(ak - bk).
Ik =
(Vk+ - Vk-) =
ηk
ηk
Vk = Vk+ + Vk- =
La potenza media che transita nella bocca k-esima è pari a:
1
1
1
1
Pk = Re{Vk Ik*}= Re{ ak 2 − bk 2 + (bkak *−bk *ak )} = ak 2 − bk 2 }
2
2
2
2
perché bk ak* - bk* ak è un numero puramente immaginario essendo la
differenza fra due numeri complessi coniugati.
324
• Usando Vk+ e Vk -, come abbiamo visto, si ottiene un flusso di potenza che
dipende dalla scelta di η k , cosa che con la scelta di usare ak e bk non
avviene. Con questa definizione la matrice [S] si introduce come:
bi
Sij=
aj
[b] = [S] [a],
per k ≠ j
a k =0
per
k≠ j
analoga alla relazione che avevamo già indicato nel caso di reti aventi la
stessa impedenza caratteristica a tutte le bocche. Usando le definizioni
dei parametri ak e bk :
Sij =
Vi − ηi
Vj+
ηj
per
k≠ j
Vk + =0
Questa relazione mostra come si possano collegare i parametri di una rete
con uguale impedenza caratteristica (Vi- / Vi+ con Vk+=0 per k ≠ j), con i
parametri di una rete connessa a linee di trasmissione con impedenze
325
caratteristiche diverse.
V1’+
V1+
V1’-
V1Z1=l1
……
(rete a n bocche)
Z1=0
Vk’+
Vk+
Vk-
Vk’Zk=lk
bocca 1
bocca k
Zk=0
• Rete a n bocche di figura, in cui i piani di riferimento siano posti in zk=0
(k=1,….,n). In questa condizione la rete abbia una matrice di scattering
[S]. Spostiamo i piani di riferimento in zk=lk (k=1,…,n); la matrice di
scattering sia ora [S’].
326
Pertanto :
[V-] =[S] [V+]
[V’-] =[S’][V’+]
Ci riferiamo a linee di trasmissione prive di perdite, le onde di tensione
sono legate nel seguente modo:
Vk’+ = Vk+ejak
Vk’- = Vk-e -jak
ak= βklk
ak = lunghezza elettrica corrispondente allo spostamento verso l’esterno
del k-esimo piano di riferimento.
In forma matriciale:
327
e ja1
0
0
ja
−
V = 0 e 2
0 V '−
0
0
e ja n
e ja1
e− ja1
0
0
ja
'
−
0 e 2
0 V = [S] 0
ja n
0
0
0
e
e− ja1
0
+
V = 0
e− ja 2
0
0
0
0
− ja 2
e
0 V '+
0
e− ja n
0
0 V '+
e − ja n
Moltiplicando a sinistra per l’inversa della prima matrice:
e− ja1
V '− = 0
0
0
e− ja 2
0
0 e− ja1
0 [S] 0
− ja n
0
e
0
e− ja 2
0
0
0 V '+
e− ja n
328
e− ja1
[S'] = 0
0
0
e − ja 2
0
0 e− ja1
0 [S] 0
− ja n
0
e
0
e− ja 2
0
0
0
− ja n
e
S’kk=e-2jak Skk : la fase di Skk ha una variazione pari al doppio della
lunghezza elettrica dello spostamento. Ciò corrisponde al fatto che l’onda
attraversa due volte il tratto fra i due piani di riferimento, una volta in
trasmissione l’altra in riflessione. Si considerano ora linee con impedenza
unitaria.
1 + +*
i
• Potenza incidente su una generica bocca : Pk = Vk Vk
2
n
2
1
+
i
quella totale : PTOT = ∑ Vk
2 k =1
n
1
−2
r
• Potenza riflessa totale : PTOT = ∑ Vk
2 k =1
2
n
1
+
−2
• Potenza netta entrante : P = ∑ ( Vk − Vk )
2 k =1
329
Deriviamo ora una relazione che ci sarà utile, per lo studio dei circuiti a
una bocca, a partire dal teorema di Poynting complesso. Come è noto, dato
un volume V chiuso da una superficie S si ha:
1
ω
1
∗
∗
∗
∗
E
×
H
⋅
nds
=
−
j
(B
⋅
H
−
E
⋅
D
)dV
−
E
⋅
J
dV.
∫
∫
∫
S
V
V
2
2
2
Questa relazione, per un mezzo caratterizzato dai parametri
ε = ε’- j ε”
µ = µ’- j µ”
e dalla conducibilità σ, separando parte reale e immaginaria e cambiando
segno ,diventa:
1
ω
Re − ∫ E × H∗ ⋅ nds =
2 S
2
∫V
( µ "H ⋅ H∗ + ε '' E ⋅ E∗ )dV +
1
∗
σ
E
⋅
E
dV = Pl
∫
V
2
∗
∗
H
⋅
H
E
⋅
E
1
Im − ∫ E × H∗ ⋅ nds = 2ω ∫ ( µ '
)dV = 2ω (WH − WE ).
−ε '
330
S
V
4
4
2
La prima relazione stabilisce che la potenza elettromagnetica reale
trasmessa attraverso la superficie chiusa S è pari alla potenza dissipata per
effetto Joule più quella dissipata nello smorzamento delle oscillazioni,
lineari e rotatorie, di polarizzazione. Inoltre ε” e µ” devono essere positive
per rappresentare delle dissipazioni.
La seconda relazione stabilisce che la parte immaginaria delle potenza
entrante in V è pari a 2ω moltiplicata per l’energia reattiva netta
immagazzinata nel campo magnetico (Wm) e nel campo elettrico (We).
L
I
+
V
-
R
C
In questo caso la potenza
complessa entrante è :
1
1
1
j
VI* = ZII* = II *(R + jω L −
)
2
2
2
ωC
1
1
In questo caso : Pl = RII*,
WH =
LII*,
4
2
1
1
VI* = ZII* = Pl + 2 jω (WH − WE )
2
2
1 II *
WE =
4 ω 2C
331
Pl + 2 jω (WH − WE )
Z=
1
II *
2
1
Riprendiamo l’espressione
− ∫ E × H∗ ⋅ n o ds = Pl + 2 jω (WH − WE ).
2 S
Se le pareti delle giunzione sono perfettamente conduttrici, la potenza può
entrare solo attraverso le bocche. A secondo membro compaiono:
Pl: valore medio della potenza dissipata nella giunzione;
WH e WE: energie medie immagazzinate nel campo magnetico ed in quello
elettrico.
Riferiamoci a una sola bocca:
1
1
1
*
*
− ∫ E × H ⋅ n o ds = ∫ E × H ⋅ zoi ds = ∫ E t × H t* ⋅ zoi dsi
2 s
2 si
2 si
ma
Et= η -1/2 et V(Z) ,
Ht= η -1/2 ht I(Z)
{
}
1
1 * − j∠η
1 ∗
*
E
×
H
*
⋅
z
ds
=
VI
e
e
×
h
⋅
z
ds
=
VI .
t
t
oi i
t
t
oi
∫
∫
s
s
2 i
2
2
i
=1
332
Consideriamo poi tutte le bocche:
1 n
Vi Ii * = Pl + 2 jω (WH − WE )
∑
2 i=1
esplicitiamo il primo membro:
n
1 n
* 1
+
−
+*
−*
Vi Ii = ∑ (Vi + Vi )(Vi − Vi )
∑
2 i=1
2 i=1
1 n
1 n
+2
−2
− +*
+ −*
= ∑ ( Vi − Vi ) + ∑ (Vi Vi − Vi Vi )
2 i=1
2 i=1
Uguagliando parti reali e immaginarie :
1 n
+2
−2
( Vi − Vi ) = Pl
∑
2 i=1
e
1 n
(Vi − Vi + * −Vi + Vi − *) = 2 jω (WH − WE )
∑
2 i=1
In forma matriciale:
V1+
V + = ...
+
Vn
V1−
V − = ...
−
Vn
; inoltre
333
[V+]T=[V1+ … Vn+]
n
; [V-]T=[V1- … Vn-] ;
[V+]T*[V+]=∑ V i
+ 2
n
; [V-]T* [V-]=
i =1
1
2
∑
i =1
Vi −
2
([V+]T*[V+]-[V-]T*[V-])=Pl , inoltre [V-]=[S][V+]
[V-]T = [V+]T [S]T e [V-]T* = [V+]T* [S]T*
1
+ T
+
+ T
T
+
Pl = 2 ( [V ] * [V ] - [V ] * [S] * [S] [V ] ) =
1
2
[V+]T* ([1] - [S]T* [S] ) [V+]
Se il sistema è privo di perdite deve essere Pl=0.
Poiché [V+] è arbitrario deve essere: [S]T*[S] =[1]
[S]-1=[S]T*
La matrice di scattering di una giunzione priva di perdite deve essere
unitaria. Questa dimostrazione vale anche per componenti non reciproci,
purché privi di perdite.
334
• Componenti reciproci ([S]=[S]T ; h.p. [η]= η[1]) e privi di perdite:
[S] [S]* = [1]
• Dalla relazione che lega le Vi- e Vi+ con WH e WE:
1 n
(Vi − Vi +* − Vi + Vi −* ) = 2jω (WH − WE )
∑
2 i=1
Poiché [V-]=[S][V+] :
1
+] T [S] T [V+]* - [V+] T [S]* [V+]* = 2jω (W -W )
([V
H
E
2
1 [V+]T ([S]T - [S]*) [V+]* = 2jω (W -W )
H
E
2
• In condizioni di risonanza WH=WE
[S]T = [S]*.
Proprietà generale che vale anche nel caso non reciproco.
Se vale anche la reciprocità:
[S]T = [S] = [S*]
[S] reale .
335
RETI A UNA BOCCA
zo
I
V=Zin I
V
I=Yin V
V- = S11V+=Γin V+
no
S1
Γin: coeff. di rifl. all’ingresso
S
Valgono anche:
V=V+ + V- ; I= η -1 (V+-V-)
V
(V + + V − )
1 + Γin
=η +
=η
Zin=
−
I
1 − Γin
V −V
• Andamento temporale armonico: ejωt
• Teorema di Poynting:
1
*
(E
×
H
⋅ n o )ds = Pr + jPj = Pl + 2 jω (Wm − We )
∫
S
2
(WH ≡ Wm e WE ≡ We)
336
• Pl = valor medio in un periodo della potenza dissipata in τ acchiuso
da S.
• Wm-We = differenza tra le energie magnetiche ed elettriche medie
immagazzinate in τ.
• Nel caso di superficie esterna di tipo PEP flusso di potenza solo
attraverso S1
1
*
E
×
H
⋅ zo ds1 = Pl + 2 jω (Wm − We )
t
t
∫
2 S1
• Ricordiamoci che Et=V(z) et ,
Ht=I(z) ht
1 ∗
VI ∫ et × h t* ⋅ zo ds1 = Pl + 2 jω (Wm − We )
S1
2
Inoltre la normalizzazione che usiamo è tale per cui:
∫S1
et × h t* ⋅ zo ds1 = 1
1 *
VI = Pl + 2 jω (Wm − We )
2
337
V e I sono relative alla sezione S1 cioè V ≡ V(0) e I ≡ I(0).
1
Poiché V=ZinI :
Zin II* = Pe + 2 jω (Wm − We )
2
P + 2 jω (Wm − We )
Zin = 2 l
= R in + jXin
*
II
Rin =
Xin =
• In alternativa :
ovvero
2Pl
*
II
resist. d’ingresso ∝ pot. media che dissipata
4ω (Wm − We ) reattanza d’ingresso ∝ diff. tra energia
II*
elettrica e magnetica immagazzinata
1
VYin*V* = Pl + 2 jω (Wm − We )
2
1 *
V Yin V = Pl − 2 jω (Wm − We )
2
Yin = 2
Pl − 2 jω (Wm − We )
*
VV
= G in + jBin
338
G in =
Bin =
2Pl
*
conduttanza di ingresso
VV
−4ω (Wm − We )
*
suscettanza di ingresso
VV
• Inoltre, poiché
V=V+ + V- , I = η-1 (V+ - V-) , nel caso η = ηreale
1 +
V−
− 1
+
−
(V + V ) (V − V ) = Pl + 2 jω (Wm − We ) , essendo Γ =
η
2
V+
1 +
1
V (1 + Γin ) V+* (1−Γin* ) = Pl + 2 jω (Wm − We )
2
η
V + V +*
2
[(1 − Γin ) + (Γin − Γin* )] = Pl + 2iω (Wm − We )
2η
Separando parte reale e immaginaria:
1
2
(1 − Γin )V + V +* = Pl
2η
;
1
(Γin − Γin* )V + V +* = 2 jω (Wm − We )
2η
339
Dalle due precedenti equazioni segue, rispettivamente:
Γin
2
= 1−
2η Pl
+
V V
+*
Γin (e
;
sin ϕin =
jϕin
−e
− jϕin
)=
2η
+
V V
+*
2 jω (Wm − We )
2ηω (Wm − We )
Γin V + V +*
• Consideriamo il caso di assenza di perdite: Pl=0
R in = 0
G in = 0
Γin = 1
Xin
4ω (Wm − We )
=
II *
Bin =
−4ω (Wm − We )
sin ϕin =
*
[Z]
[Y]
VV
2ηω (Wm − We )
+
V V
+*
[S]
340
• Se l’energia magnetica accumulata nel volume τ è pari a quella elettrica
immagazzinata nello stesso volume si ha la
condizione di risonanza :
Wm=We
• Tale condizione si verifica per:
a) V(0)=0 e I(0) ≠ 0
b) I(0)=0
e V(0) ≠ 0
(V+= -V-)
(V+= V-)
V(0) e I(0) sono tensione e corrente sulla sezione di ingresso.
Il caso V(0) = I(0) = 0 non è un caso di risonanza perché corrisponde a un
circuito isolato dalla linea di ingresso.
Esaminiamo a):
I≠0
V=0
Xin=0
Bin → ∞ (a denominatore infinit. 2o ordine)
341
Γin = 1
ma
sinϕin=0
Γin =
V−
V
+
=−
0
ϕin =
V+
V
+
= −1
π
ϕin = π
⇒
Condizioni di RISONANZA SERIE
1
L
Rappresentazione circuitale:
1’
C
1 e 1’ morsetti di ingresso del circuito a una bocca.
342
Esaminiamo b):
I=0
Yin → ∞
V≠0
Bin=0
Γin = 1
ϕin = 0
Condizioni di ANTIRISONANZA o RISONANZA PARALLELA
1
Rappresentazione circuitale:
C
L
1’
343
Se si considerano anche le perdite:
1
SERIE
R
PARALLELO
1
G=R-1
L
C
C
L
1’
1’
A rigore in queste strutture non è possibile avere delle oscillazioni permanenti. Si
possono invece avere oscillazioni smorzate del tipo :
ˆ −ξ t sin(ω t + ϕ ) = Im[Ve
ˆ jϕ e( −ξ +iω )t ]
V(t) = Ve
ɵ jΨ e( −ξ +iω )t ]
I(t) = ɵIe −ξ t sin(ω t +Ψ ) = Im[Ie
Se si introducono la frequenza complessa p = - ξ+ j ω e i fasori
ˆ jϕ
V = Ve
e
ˆ pt ]
V(t) = Im[Ve
I = ɵIe jψ
;
si ha:
I(t) = Im[ ɵIe pt ]
344
Quindi anche nel caso di oscillazioni smorzate vale il formalismo delle
oscillazioni permanenti purché si consideri una frequenza complessa.
• Per il circuito serie:
V(t) = RI(t) + L
Passando ai fasori:
Per avere V = 0
dI(t) 1
+ ∫ Idt.
dt
C
1
V = (R + pL +
)I
pC
e I≠0
si deve annullare l’impedenza:
1
R + pL +
=0
pC
I valori di p che soddisfano questa equazione permettono di ricavare le frequenze
naturali (o libere) di oscillazione del sistema. Abbiamo, perciò:
p2LC + pRC+1 = 0
p2 + p
R 1
+
=0
L LC
e, per L e C ≠ 0,
R
1 R
p=−
±j
−
2L
LC 2L
2
345
Le oscillazioni naturali smorzate si ottengono se
1 R
<
LC 2L
2
R2 <
ovvero
4L
C
Se invece:
1 R
>
LC 2L
2
p è reale e non si ha oscillazione ma un decadimento esponenziale nel tempo.
Nel caso R=0, l’equazione per p si riduce a:
p2 +
1
=0
LC
⇒
p=
±j
LC
2
cioè p è immaginario puro e si ritrova la ω 0 =
1
LC
del caso privo di perdite.
346
Nel caso reale di strutture con perdite , ponendo
R
=ξ :
2L
2
p = −ξ ± j ωo
2
− ξ = −ξ ± jωˆ , con
2
2
ξ
ˆ
ω = ω0 1 − ,
ω0
ωˆ : frequenza di oscillazione naturale
ω0 : frequenza di oscillazione naturale senza perdite
• Struttura parallela:
G
risultato formalmente identico purché sia ξ =
2C
• Perdite
≡
frequenza di risonanza complessa
• Perdite basse ( R → 0 , G → 0 ) ω̂ → ω0
• Considerazioni energetiche.
• Strutture prive di perdite.
1
1
2
CVc2(t)
LIL (t) +
W(t)=Wh(t)+We(t)=
2
2
347
• Alla risonanza, cioè in presenza di oscillazioni permanenti alla frequenza reale
1
, nel caso serie:
ω0 =
LC
I L (t) = I(t) = ɵI sin ω0 t
Vc (t) =
1
1 ɵ
I(t)dt
=
−
I cos ω0 t
∫
C
Cω0
⇒ W(t) =
W(t) =
1 ɵ2 2
1 1 ɵ2
1
2
2
LI sin ω0 t +
I
cos
ω
t
,
poichè
ω
=
0
0
2
2 ω0 2C
LC
1 ɵ2
1 2 1 ˆ2
LI (sin 2 ω0 t + cos 2 ω0 t) = LIɵ = CV
2
2
2
In risonanza W(t) è costante e pari al valore massimo dell’energia immagazzinata
nell’induttanza o nel condensatore.
W(t) = cost. = Whmax=Wemax = <W(t)>
essendo W(t) il valor medio in un periodo di W(t).
348
Anche per un circuito parallelo si giunge allo stesso risultato.
Consideriamo ora le perdite (alla risonanza alla pulsazione
I(t)
+
ˆt
I(t) = ɵIe−ξt sin ω
R
V(t)
-
ω̂ )
C
ˆ −ξt sin(ω
ˆ t + ϕ)
V(t) = Ve
ˆ ɵ −2ξt sin(ω
ˆ t + ϕ) sin ω
ˆt
P(t) = VIe
L
oscillazioni smorzate
Approx. piccole perdite:
a) ω̂ ≅ ω0
b) V(t) e I(t) sinusoidali in T0 = 2π/ ω0 e diminuiscono istantaneamente alla
fine di un periodo. In altri termini, fissato un istante Ti per cui risulti ω̂ Ti = π/2,
si ha:
1 ˆɵ
VI cos ϕe −2ξTi
2
1 ˆɵ
cos ϕe −2ξ(Ti +To ) = P(Ti )e −2ξTo
e, dopo un periodo T0, P(Ti + To ) = VI
2
P(Ti ) =
349
Def :
2δ = ln
P(Ti )
= 2ξTo
P(Ti + To )
Def :
Q = ω0
W
Pl
FATTORE
⇒ δ = ξTo
DI QUALITA '
(o coeff. di risonanza)
ω0 = pulsazione di risonanza del modo nella struttura priva di
perdite
W = valore medio in un periodo dell’energia immagazzinata
Pl = valore medio in un periodo della potenza dissipata
All’ istante Ti :
1 ɵ 2 −2ξTi
W1 = LI e
, dopo un
periodo :
2
1 ɵ 2 −2ξ(Ti +To )
W2 = LI e
= W1e−2ξTo = W1e−2δ
2
350
Diminuzione di energia media in un periodo = potenza media dissipata x To:
W1-W2=PlT0
PlTo
δ = 2W
1
W1(1-e-2δ) ≅ W1[1-(1-2 δ)]=2 δ W1=PlTo
Dalla definizione di Q:
ω0
W 2π W
π
Q=
=
=
=
.
Pl T0 Pl ξT0 2ξ
2
ˆ = f (ω0 )
ω
ˆ = ω0
: ω
ξ
1
1−
=
ω
1
−
0
2Q
ω
0
2
Nei risonatori a microonde Q può avere valori anche molto elevati (103-104), ma
anche in un caso di Q=50 si ha:
ˆ = ω0 1 − 10−4 ≃ ω0 ,
ω
errore inferiore a 10−2
351
• Zin alla risonanza:
RLC serie
R
Zin
L
ξ=
ω
ω L
R
1
⇒Q= 0 = 0 =
2L
2ξ
R
ω0CR
(ω0 2 =
C
p ω0
1
pRQ 1
Zin (p) = R + pL +
=R+
+ ω0 RQ = R 1 + Q
+
pC
p
ω
p
ω0
0
In condizioni prossime alla risonanza ( ξ → 0 , ω̂ ≅ ω0 )
⇒ p ≃ jω ≃ jω0
ω ω0
Zin (ω) = R 1 + jQ
−
= R
ω0 ω
Zin è puramente reale
352
1
)
LC
Zin
G=R-1
C
ω0C
G
1
ξ=
⇒Q=
=
,
ω0 LC
2C
G
L
1
e Zin =
G
RLC parallelo
per
ω = ω0 .
353
Riepilogo strutture a microonde a una bocca:
zo
I
V
no
S1
S
1) Strutture prive di perdite.
• Caratterizzate da 2 parametri:
ω0 = pulsazione di risonanza
e
W(t) = We(t)+Wh(t) = costante.
• Circuiti equivalenti:
L
L
C
L e C legati a
ω0 e W(t)
C
Serie
Parallelo
354
2) Strutture con perdite.
• Caratterizzate da 3 parametri:
ω0 = pulsazione di risonanza del caso precedente,
Q = fattore di qualità Q = ω0
W π
=
Pl δ
Zin= impedenza d’ingresso
• Caso serie
• Caso parallelo
ω0 L
1
Q=
=
R
ω0 RC
Zin = R
Q=
ω0C
1
=
G
ω0 LG
Zin =
1
G
Noti ω0, Q e Zin si possono calcolare R (o G), L e C e utilizzare i circuiti
equivalenti. Invece di Zin si può usare Pl , infatti:
(serie)
R=
2Pl
∗
II
(parallelo)
G=
2Pl
VV
*
355
RISONATORI A CAVITA’
Nella banda delle microonde, tipiche strutture a una bocca risonanti sono costruite
con tratti di guida d’onda chiusi in corto circuito da entrambi i lati. Si formano
cioè delle scatole metalliche chiuse o cavità.
L’energia elettrica e magnetica è immagazzinata nella cavità, mentre la potenza è
dissipata nelle pareti metalliche e nel dielettrico che riempie la cavità.
Il risonatore può essere eccitato tramite un piccolo foro, o un piccolo dipolo
elettrico o magnetico.
Consideriamo dapprima strutture prive di perdite:
z
z
z=0
z=l
Piani metallici posti in z=0 e z=l.
356
Campo elettrico trasverso:
(kz = j βz)
Et = et(q1,q2)(P1e jβzZ +P2e -j βzZ)
et(q1,q2) è la stessa della guida indefinita. Devo imporre, però, la condizione al
contorno sui piani metallici in z=0 e z=l:
P1 e jβzZ+P2 e -jβzZ = 0 in z=0 e z=l
Etang = Et = 0 in z=0 e z=l
• in z=0: P1+P2 =0
P2 = - P1
-P2e jβzZ + P2e -jβzZ= -P2(e jβzZ- e -jβzZ) = -P2 2 j sin βz z
• in z=l: -P2j sinβzl =0
βz l= sπ
Perciò βz = sπ/l (equivale a
l=s
con s = 1,2,3,…
λz
2π
, λz = )
βz
2
In questo caso βz=βz(l), mentre in una guida indefinita βz=βz(ω).
Inoltre kt2+kz2=kt2- βz 2= -ω2µε. Se impongo ora il valore di βz trovato, la
frequenza è proprio quella di risonanza ω0:
2
2
1 sπ
sπ
2
k
ω02µε = − k t 2 ⇒ ω0 =
−
t .
µε l
l
357
RISONATORE PARALLELEPIPEDO
y
b
x
a
0
modi TM e TE:
−k t 2
2
2
2
2
1 mπ nπ sπ
mπ nπ
=
+
⇒
ω
=
0
+ +
µε a b l
a b
2
Esistono ∞3 frequenze di risonanza; a ognuna di tali frequenze
corrisponde un campo differente.
358
• Modi TEm,n,s: m = 0,1,2,… n = 0,1,2,… (non contemp. nulli)
Se s=0: Et=(P1+P2)et(q1,q2) non dipende da z, inoltre deve essere
Et =0 in z=0 e z=l
zero.
campo nullo. Allora s deve essere diverso da
solo uno fra m, n, s può essere =0.
• Modi TMm,n,s: m = 1,2,3,… n = 1,2,3,…
In questo caso ez ≠ 0 non si deve annullare (in quanto normale) in z=0 e z=l,
quindi anche per s)=0 può esistere un campo normale. Quindi s = 0,1,2,3,…
• Gli indici m, n, s sono collegati con le variazioni in x, y, z. Perciò s=0
campo costante in z.
• Le frequenze di risonanza formano un insieme discreto che si addensa
sempre di più al crescere degli indici m, n, s. Quando le frequenze di
risonanza sono troppo vicine è difficile selezionare un solo modo. In genere si
cerca di evitare tale situazione.
359
RISONATORE CILINDRICO
In questo caso un tratto di guida circolare viene chiuso in corto circuito con due
piani metallici in z=0 e z=l.
Modi TE:
2
−k t =
a
quindi: ω0 =
ξ'2
nm
a2
(ξ’nm: radice m-esima della derivata
della funzione di Bessel Jn)
2
1 sπ ξ 'nm
+ 2
µε l
a
2
Modi TM:
−k t 2 =
quindi:
ξnm 2
a
2
ω0 =
n = 0,1, 2,..
m = 1, 2,3,...
s = 1, 2,3,...
(ξnm: radice m-esima delle funzione di Bessel Jn)
2
1 sπ ξnm
+
µε l a
2
n = 1, 2,3,..
m = 1, 2,3,..
s = 0,1, 2,...
360
• Nella progettazione dei risonatori è utile far ricorso alla “carta dei modi” o
“carta dei modi risonanti”, un diagramma che ha in ascisse (2a/l)2 e in
ordinate (2af)2. Nella carta sono cioè riportati gli andamenti della frequenza,
normalizzata con il raggio, in funzione del rapporto a/l.
Per l → ∞ , 2a / l → 0 si ritrovano i valori delle ξnm per i modi TM e delle
ξ’nm per i TE.
Al variare di 2a/l si ottengono delle rette dette “di accordo” che hanno un
pendenza dipendente da s: tutte le rette che hanno lo stesso valore di s sono
parallele. Per s=0 si hanno rette (modi TM) orizzontali. All’aumentare di s
cresce la pendenza. Rette coincidenti corrispondono a modi degeneri, ovvero
modi che, pur avendo configurazione di campo diversa tra loro, hanno la stessa
frequenza di risonanza per ogni valore di (2a/l)2. Dove si intersecano linee di
modi diversi si ha risonanza per più modi (modi non voluti o spuri e modo
voluto).
361
Carta dei modi risonanti
(2af)2, (MHz – cm)2
20·108
15·108
• Risonatori “lunghi”:
(2a/l)2 piccolo, il modo
dominante è [1,1,1].
10·108
• Risonatori “corti”:
(2a/l)2 grande, il modo
dominante è (0,1,0).
• I valori di Q per questi
risonatori sono limitati dalle
perdite sulle pareti conduttrici
e dalla tecnica utilizzata per
l’accordo, o “sintonia”.
5·108
0
2
4
(2a/l)2
6
362
2a
Risonatore accordabile
(o sintonizzabile)
l variabile
• Il pistone mobile non garantisce un buon contatto con la guida d’onda circolare,
di conseguenza in tale ragione penetrano delle correnti che dissipano parte
dell’energia della cavità sulla superficie del pistone e nel tratto di guida
corrispondente.
• Valutazione del Q dovuto alla conducibilità non perfetta delle pareti del
risonatore. Sono in genere trascurabili le perdite nel dielettrico.
W
Q = ω0
Pl
ω0: di risonanza del risonatore senza perdite
W: energia media immagazzinata in un periodo To (costante nel caso privo di
perdite, decrescente nel caso reale, discretizzata)
363
W(t)
Pl: potenza media dissipata in To
W=
to to+T
1
*
*
(
µ
H
⋅
H
+
ε
E
⋅
E
)dτ
∫
4 τ
t
• Per to < t < to+T l’energia immagazzinata rimane costante, siamo cioè in un
sistema privo di perdite per il quale µH•H* = εE•E* in ogni punto di τ
W=
1
1
*
*
µ
H
⋅
H
d
τ
=
ε
E
⋅
E
dτ
∫
∫
τ
τ
2
2
esiste un campo elettrico tangenziale E τ
esiste una componente del vettore di Poynting uscente dalla cavità. La
potenza dissipata nel conduttore è:
• Pareti di conduttore non perfetto
Pl =
1
Re ∫ E τ × H τ * ⋅ n o dS
S
2
• Vale la condizione di Leontoviĉ: E τ =ηc H τ ×n 0
⇒ Pl =
1
Re ηc ∫ H τ ⋅ H τ*ds
2 S
364
• Dalla def. di Q = ω0
W
Pl
si ha:
1
µ ∫ H ⋅ H *dτ
2 τ
Q = ω0
;
1
Re ηc ∫ H τ ⋅ H τ*dS
2 S
inoltre
ηc =
Q=
ω0µ
(1 + j)
2g
e
∫S
H τ ⋅ H τ*dS
è sicuramente reale
ω0µ ∫ H ⋅ H*dτ
τ
ω0µ
*
H
H
dS
⋅
τ
τ
∫
S
2g
• Q proporzionale
direttamente a τ
inversamente a S
365
• Massimo Q corrisponde perciò a massimo volume a parità di superficie: i
risonatori sferici sono i migliori da questo punto di vista.
• Scelta una forma se confronto un risonatore “piccolo” con uno “grande”:
piccolo
freq. di risonanza elevate e distanziate fra loro, Q basso
grande
freq. di risonanza basse e poco distanziate fra loro, Q alto
• Se le freq. di risonanza sono troppo vicine fra loro si rischia di eccitare un modo
non voluto (spurio o parassita).
• Scelta ottimale : risonatore abbastanza grande per avere Q elevato , ma non
troppo grande per avere ∆ f ragionevoli.
366
y
Calcoliamo il Q per il modo dominante (b sia
la dimensione più piccola del risonatore): TE01
l
b
2
a
x
1 π π
ω0 =
+
µε a l
2
• Ci servono le espressioni delle componenti di campo magnetico, cioè Hx e Hz,
possiamo ricavarle dall’analisi generale o in maniera più semplice. Sappiamo che
Hz ha un andamento tipo seno o coseno in x e z, ora in una sezione trasversa Hz è
tangente alle pareti PEP della guida e non deve annullarsi su esse
π
Hz ∝ cos x
a
Per quanto riguarda la dipendenza longitudinale, Hz, essendo normale alle PEP
poste in z=0 e z=l, deve annullarsi in z=0 e z=l
Hz ∝ sin π z
l
π π
⇒ H z = A cos x sin z = h z Ze (z)
a l
367
• Hxxo=htZh(z)
con
ht =
kz
kz
kt
kt2
∇h =
2 t z
π π
A − sin x x o ,
a a
π
π
2
inoltre
k z = jβ z = j
e
kt = −
l
a
jπ / l
π π
⇒ Hx =
A − sin x Zh (z)
2 a
a
−(π / a)
Ma Zh(z)=(-P1e
j βz Z
+ P2e
- j βz Z
2
π
) ∝ cos x
a
perché Hx, tangente
alle PEP poste in z=0 e z=l, non deve annullarsi in z=0 e z=l
π
π
π
P1 = - P2 , Zh (z) = 2P2 cos z ⇒ H x = j A sin x cos z
l
l
a
l
a
368
• Dobbiamo calcolare
∫τ
∫τ
2
H ⋅ H*dτ
e
∫S
H τ ⋅ H τ* dS
2
H ⋅ H*dτ = ∫ ( H z + H x )dτ =
τ
2
a
π
π
2
2
2
2π
2π
= ∫ A cos x sin z + sin x cos z dτ =
τ
a
l l
a
l
2
2
2
a
l
a
a
l
A
a
= A2b
+
abl 1 +
=
2 2 l 2 2 4
l
∫τ
H τ ⋅ H τ* = somma
di 6
contributi
uguali a coppie =
2
a
b
a
2
2π
=2 ∫
... + ∫
... + ∫
... = 2A ∫ ∫ sin x dxdy +
S(z =0)
S(x =0)
S(y =0)
0 0l
a
b l
a l
π
π
2π
+ ∫ ∫ sin z dydz + ∫ ∫ cos 2 x sin 2 z +
0 0
0 0
l
a
l
2
3
al a 2
π
π
a
a
+ sin 2 x cos 2 z dxdz = A 2 1 + + bl 1 +
l
a
l
l
2 l
369
Quindi
a 2
1
abl 1 +
4
b
ω0µ
Q=
a 3
ω0µ al a 2
1+
+ bl 1 +
2g 2 l
l
• Se a=b=l, risonatore cubico:
Se, inoltre, a = 2cm:
Q=
ω0µ a
ω0µ 6
2g
2
1 π π
ω0 =
+
µε a b
, Q ∝ a.
2
=6.664 x 1010 rad/sec
φο= ω0/2π ≈10.6 GHz =10.6 • 109 Hz.
Se il risonatore è di rame (g=5.8 x 107 S/m):
Q ≈ 10389,4 (modoTE101).
370
Come si inseriscono le cavità nei circuiti a microonde?
a) Accoppiamento di tipo elettrico:
E
si inserisce il conduttore centrale di un cavo
coassiale, che si comporta come una piccola
antenna (o sonda) lineare. L’accoppiamento
varia con il modo.
b) Accoppiamento di tipo magnetico:
in questo caso si realizza un loop di corrente
B
(dipolo magnetico); può essere realizzato
piegando il conduttore interno di un cavo coax
.
fino a fargli toccare una parete della cavità; si
eccita un campo magnetico perpendicolare al
piano del loop.
371
c) Accoppiamento tramite fori:
attraverso il foro il campo e.m. guidato
cavità
guida
va, in parte ,verso la cavità.
• In genere se si vuole eccitare un modo in cavità si cerca il massimo
accoppiamento, mentre se si usa la cavità come elemento di un canale di misura (di
solito della frequenza) si cerca di perturbare il meno possibile il campo in guida.
• Esempio: risonatore cilindrico a sezione circolare eccitato da un antennina
lineare. Si cerca il max accoppiamento, si deve porre il cavo centrale del coassiale
allineato con le linee di forza del campo elettrico e nella sezione in cui è massimo il
campo elettrico in funzione delle coordinate spaziali.
372
sezione trasversa
sezione longitudinale modo TE11
in questo caso si cerca il
massimo del campo
magnetico
modo TM
373
In un circuito a microonde le cavità possono essere collegate:
a) Come terminazione
La cavità è usata come carico, cioè
come struttura a una bocca, che
produce delle riflessioni sulla linea di
alimentazione (cavità a reazione)
b) In derivazione
Struttura tipica per le misure di
frequenza. In questo caso si cerca un
basso valore di accoppiamento per
disturbare il campo in guida.
374
c) In trasmissione
In questo caso si ha una struttura a due
bocche, tipica dei filtri a microonde.
• Supponiamo di poter variare la frequenza del generatore posto all’ingresso del
circuito, mantenendo la stessa potenza, frequenza per frequenza. In uscita si ha:
caso b)
Pout
Per frequenze diverse da quelle di risonanza il
segnale passa invariato, per frequenze prossime a
quella risonanza buona parte del segnale va ad
eccitare la cavità e non arriva in fondo alla guida.
0
375
caso c)
Pout
ω
ω0
In questo caso se la frequenza di ingresso è diversa da
quella di risonanza il segnale non entra in cavità e non
può essere trasmesso alla guida in uscita. Se invece la
frequenza del segnale in ingresso è prossima alla
risonanza si eccita la cavità e si trasmette il segnale in
uscita. Si ha un comportamento da filtro passa banda.
• Cavità inserita in un circuito
Il Q della cavità è diverso da quello del risonatore isolato (“non caricato”) Q0.
In tal caso avevamo visto che:
ω ω0
Zin (ω) = R 1 + jQ
−
ω
ω
0
Zin (ω) =
ω≅ω0
caso serie
ω≅ω0
caso parallelo
1
ω ω0
−
G 1 + jQ
ω
ω
0
376
per ω =
V+
V-
ω0
R caso serie
Zin=
1/G caso parallelo
• Nel progettare le cavità si cerca di avere
adattamento fra linea di trasmissione e cavità
alla frequenza di risonanza.
Se facciamo riferimento al caso di impedenza
caratteristica della linea η =1, per avere
adattamento dovrà risultare R=1.
377