ECOGRAFIA 3-D IN TEMPO REALE
di Massimo Pappalardo e Giosuè Caliano
L’ultima frontiera dell’ecografia è la “visione” tridimensionale in tempo reale (4D) degli organi interni. Quest’affascinante sfida impone una “rivoluzione” sia nella tecnologia delle sonde da utilizzare che nell’approccio
elettronico-sistemistico da implementare sulle macchine ecografiche. La progettazione di simili apparati sarebbe impossibile senza il calcolo intensivo.
Prof. Massimo Pappalardo
Dipartimento di Ingegneria
Elettronica
Università Roma Tre
[email protected]
Ing. Giosuè Caliano
Dipartimento di Ingegneria
Elettronica
Università Roma Tre
[email protected]
• Abstract
Many academic and industrial research teams are working towards the improvement
of ultrasound techniques for medical diagnostic applications, in order to have volumetric echographic images in real time. The unique way to approach this problem is
to use a matrix array transducer and to develop an echographic system able to handle
thousands of electronic channels. A volumetric echographic system is a hard task !
During the past decades huge advances have been made in the field of ultrasound imaging for medical diagnostic applications. Conventional echographic probes are based,
by now, on the mature piezoelectric technology. Recently, alternative technologies
based on different operating principles have been proposed. In particular, the silicon
micromachined capacitive ultrasonic transducer technology (cMUT) has shown to be
suitable for the replacement of the current technology. The main benefits of cMUT technology can be found in the silicon micromachining process, commonly used in microelectronics. In order to have real time volumetric images a two dimensional matrix
transducer must be used; the afore mentioned cMUT technology is well suited for this
type of new transducers. Roma Tre has a program to develop this kind of transducers
but, because their geometrical characteristics are strongly dependent on the structure
of the echographic system used, a preliminary exploration must be made in order to
define its principal features. This activity entails a huge amount of end-to-end simulations of the whole process, from signal acquisition to the final image, to assess the impact of design choices on diagnostic capabilities.
L’ecografia è una tecnica diagnostica molto potente, largamente utilizzata in diversi settori, quali l’internistica, la ginecologia e la cardiologia, per citare solo i
più rilevanti. Rispetto ad altri sistemi diagnostici, quali la risonanza magnetica
(NMR) e la tomografia assiale computerizzata (TAC), l’ecografia fornisce immagini
con risoluzione inferiore, ma offre importanti vantaggi, quali il costo contenuto, la
non invasività e la possibilità della presentazione in tempo reale di organi interni
in movimento. Per questo motivo la cosiddetta “eco-cardiografia” ha trovato larga
applicazione in cardiologia, essendo l’unica tecnica capace di visualizzare il moto
delle valvole cardiache.
ECOGRAFIA 3D IN TEMPO REALE
CASPUR ANNUAL REPORT EDIZIONE 2009
I sistemi ecografici forniscono un’immagine in sezione degli organi interni del
corpo umano su un piano detto “piano di scansione”. L’immagine è costruita deflettendo e focalizzando un fascio di ultrasuoni il cui asse giace nel piano di scansione ed acquisendo gli echi riflessi lungo tale asse (linea di vista). Il fascio acustico
è controllato tramite trasduttori lineari (1D), tipicamente di 64, 128 o 192 elementi, grazie a un sistema elettronico noto come beam-forming. All’aumentare
del numero di elementi del trasduttore, e quindi dei canali del beam-forming,
aumenta la risoluzione, cioè la qualità dell’immagine. In altri termini, per migliorare le prestazioni del sistema è necessario aumentarne la complessità.
Per seguire il movimento è necessario acquisire un numero di immagini al secondo non inferiore a 10-20. Al fine di ottenere la riproduzione di un volume è
necessario acquisire, su piani di scansione distinti, un congruo numero di immagini, che opportunamente elaborate via software, permettono la rappresentazione
tridimensionale.
I primi tentativi di acquisire immagini ecografiche tridimensionali risalgono
agli anni ‘90. Combinando la scansione elettronica ottenuta mediante un classico
trasduttore lineare con quella meccanica realizzata traslando e ruotando il trasduttore stesso, si possono ricostruire differenti piani di vista e quindi un volume.
Tali sistemi, noti come ecografi 3D, sono attualmente commercializzati da tutte
le maggiori aziende operanti nel campo dell’ecografia per diagnostica medica.
Gli ecografi 3D forniscono un immagine tridimensionale con una risoluzione
paragonabile a quella dei sistemi lineari classici, tuttavia, la scansione meccanica
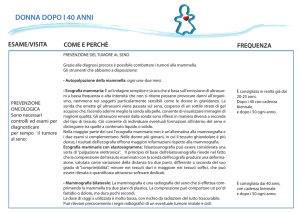
è lenta e non consente il tempo reale. Si possono applicare solo quando gli organi interni possono essere resi immobili per il tempo necessario all’acquisizione
volumetrica (2-3 secondi), per esempio in ginecologia invitando la paziente a
trattenere il respiro (Figura 1). La rappresentazione volumetrica delle valvole
cardiache, che necessita di una successione di piani di scansione molto veloce,
circa 120 al secondo, non può essere ottenuta con una scansione mista elettronico-meccanica.
Figura 1
Alcune immagini ecografiche 3D.
114
MASSIMO PAPPALARDO E GIOSUÈ CALIANO
Un trasduttore costituito da una matrice di elementi bidimensionale, anziché lineare, consente l’indirizzamento totalmente elettronico di un fascio ultracustico
in qualsiasi direzione dello spazio, scandendo un volume, a velocità sufficiente.
Questa rappresentazione 4D costituisce una delle frontiere di ricerca della moderna eco-cardiografia. Attualmente solo Philips commercializza un sistema 4D
cardiologico, mentre è noto che General Electric (GE) e Siemens, stanno lavorando
per sviluppare sistemi con prestazioni simili.
La realizzazione di un prototipo di sonda 4D per uso cardiologico può apparire
ambizioso essendo, oggi, uno sviluppo di frontiera nel campo delle sonde ecografiche; va però considerato che gli autori hanno sviluppato una nuova tecnologia
per la realizzazione di sonde ecografiche, la cosiddetta tecnologia cMUT (v. riquadro), che ben si presta alle applicazioni 4D.
• Formazione dell’immagine volumetrica
In estrema sintesi, si può dire che un sistema ecografico deflette e focalizza il fascio acustico assegnando, per ogni istante di tempo, sia in trasmissione che in ricezione, una determinata fase e/o ritardo ad ogni elemento della sonda.
L’elettronica che opera questi ritardi costituisce il sistema di beam-forming di cui
abbiamo parlato. Negli ecografi basati su trasduttori lineari, l’elettronica di beamforming è contenuta nell’ecografo ed i segnali sono trasmessi ai singoli elementi
del trasduttore sito nella sonda tramite cavi schermati indipendenti. Una sonda
per ecografia volumetrica è invece bidimensionale e quindi il beam-forming deve
assegnare una distribuzione di fasi e/o ritardi su una superficie, gestendo, a parità
di capacità di penetrazione, risoluzione, ecc., un numero di canali pari al quadrato
di quello di un equivalente sistema ecografico lineare convenzionale.
Prendendo come riferimento una sonda settoriale convenzionale per uso cardiaco, l’anatomia del paziente (la finestra pericardica) ed il tipo di scansione impongono un numero minimo di 64 elementi, cioè un beam-forming di 64 canali.
Lasciando inalterate queste condizioni, e volendo scandire un volume anziché una
sezione, sarà necessaria una sonda costituita da un quadrato di 64x64=4096 elementi. Qualora il beam-forming di questa sonda fosse completamente allocato
nell’ecografo, sarebbero necessari altrettanti cavi di collegamento singoli. È facile
intuire che un tale numero di collegamenti è impraticabile. È quindi necessario
adottare una strategia di beam-forming che suddivida le funzioni da esso svolte
assegnandone parte ad una specifica elettronica da integrare nella sonda stessa
e parte all’ecografo, in modo da ridurre drasticamente il numero di cavi di collegamento.
• Strategia del Beam-Forming
Il progetto della sonda matriciale per applicazioni cardiache 4D presenta due
aspetti: quello sistemistico-elettronico e quello strettamente tecnologico. Il problema di un ecografo volumetrico per cardiologia è quello di realizzare un beamforming capace di gestire circa 4.000 ritardi/fasi con un numero di cavi prossimo
115
ECOGRAFIA 3D IN TEMPO REALE
CASPUR ANNUAL REPORT EDIZIONE 2009
all’attuale stato dell’arte di 192. La recente letteratura scientifica evidenzia tre approcci, sviluppati o in fase più o meno avanzata di sviluppo, al problema.
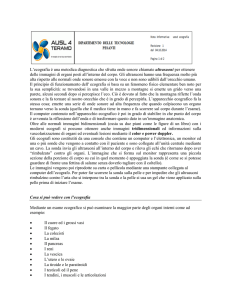
Il “Beam forming” a zone di fase costante (anche noto come Reconfigurable
Array), probabilmente già utilizzato commercialmente, sfrutta il fatto che, dati un
particolare angolo di deflessione e una distanza focale del fascio acustico, esistono
sempre sulla superficie del trasduttore zone a fase costante. Nel caso più generale,
queste zone sono dei semi-anelli a corona variabile, le cui dimensioni e posizioni
dipendono, appunto, dall’angolo di deflessione e dalla distanza focale. Al variare
di questi ultimi, tramite interruttori elettronici interposti tra elementi contigui (Figura 2a), si collegano elettricamente, tra di loro e ad un unico cavo, tutti gli elementi della matrice appartenenti ad una stessa zona equifase. Questa soluzione
riduce notevolmente il numero dei cavi ma necessita l’integrazione nella sonda
di una matrice di circa 4000 interruttori cMOS ad alta tensione e dell’elettronica
di pilotaggio e front-end.
Figura 2
Strategie di beam­forming:
a) Reconfigurable array.
a)
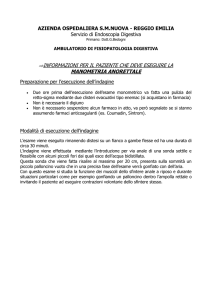
Nel Micro beam forming, invece, si sfrutta la considerazione che in ogni caso elementi contigui di una zona della sonda hanno ritardi che differiscono solo di poco
tra di loro. Il trasduttore viene quindi diviso in zone contigue i cui elementi sono
pilotati dallo stesso cavo, mentre i differenziali di ritardo fra i singoli elementi vengono creati e gestiti localmente. Essendo di piccola entità, tali ritardi possono essere
generati mediante sfasatori analogici. Lo svantaggio di questa soluzione è che sfasatori e linee di ritardo analogiche sono difficilmente integrabili ad alta densità sul
trasduttore stesso, a causa della presenza di elementi induttivi (Figura 2b).
Nel Campionamento temporale, infine, i segnali provenienti da gruppi di circa
16 elementi della sonda sono letti e campionati da un multiplexer a frequenza
molto elevata ed inviati all’ecografo mediante un unico cavo (Figura 2c), utilizzando tecniche TDM (Time Division Multiplexing) molto sviluppate nel campo delle
telecomunicazioni. L’ecografo separa e ricostruisce nel tempo i segnali di ciascun
elemento, operando completamente il beam-forming a livello digitale. Questo è
l’approccio più flessibile dei tre, ma sicuramente il più pesante dal punto di vista
dell’elettronica da integrare nella sonda e da allocare nell’ecografo, e comporta
una rivoluzione dell’impostazione progettuale tradizionale.
116
MASSIMO PAPPALARDO E GIOSUÈ CALIANO
Figura 2
SONDA
ECOGRAFO
Strategie di beam­forming:
ECOGRAFO
SONDA
SFASATORE
1
2
3
1
c) campionamento temporale.
DELAY LINE
CAVO
1
2
CAVO
MPX
b) micro beam­forming;
16
n
1
2
3
2
BEAM
FORMING
DELAY LINE
2
MPX
1
n
16
1
2
192
n
BEAM FORMING
b)
MICRO-BEAM
FORMING
1
2
3
MPX
DELAY LINE
16
c)
Gli autori stanno studiando un’interessante variante di questo approccio, che associa
i vantaggi del sistema TDM a quelli peculiari dell’approccio a zone a fase costante.
L’idea di base è quella di sommare i campioni dei segnali relativi ad elementi facenti parte di una stessa zona equifase direttamente nella sonda ed inviare i campioni somma all’ecografo il quale provvederà a ricostruire i segnali di ciascuna zona
equifase, ritardarli ed infine sommarli. Con questo approccio si
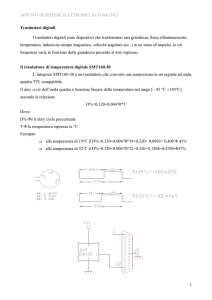
• Tecnologia di microlavorazione del silicio
“dovrebbe” ottenere una sensiIl limite delle prestazioni dei sistemi ecografici per diagnostica medica è insito
bile riduzione della complessità,
nei trasduttori ad ultrasuoni, cioè nei dispositivi capaci di generare e ricevere
rispetto al sistema TDM, sia delonde ultracustiche. La quasi totalità di quelli in uso utilizza il ben noto effetto
l’elettronica da integrare nella
piezoelettrico che si verifica in alcune ceramiche. La tecnologia dei trasduttori
sonda che di quella residente
piezoelettrici è matura, e fornisce buone larghezze di banda e sensibilità, ma ha
nell’ecografo.
quasi raggiunto i limiti intrinseci di sviluppo.
Indipendentemente dall’apRecentemente è stato ampiamente dimostrato che l’effetto elettrostatico coproccio utilizzato, la riduzione
stituisce una valida alternativa all’effetto piezoelettrico.
della complessità del sistema
Nel 1996 sono stati realizzati presso l’Università di Stanford, USA, e a partire
implica la rinuncia a parti dei sedal 1998 presso l’Università di Roma Tre, i primi trasduttori ultracustici elettrostatici a cella chiusa attualmente noti con la sigla cMUT (Capacitive Micromachignali prodotti dagli elementi del
ned Ultrasonic Transducer). Essi consistono in un insieme bidimensionale di
trasduttore. L’unico modo di vamicrocelle elettrostatiche chiuse (Figg. 3a e 3b), connesse elettricamente in palutare e minimizzare l’impatto
rallelo e pilotate in fase, realizzate con tecniche di microlavorazione superficiale
dell’approccio scelto sulle prestadel silicio (MEMS). Gli ampi sviluppi successivi hanno raggiunto caratteristiche
zioni diagnostiche dello strucompetitive, se non migliori, dei tradizionali trasduttori piezoelettrici.
mento è quello di simulare il
I trasduttori cMUT si avvantaggiano delle ben consolidata tecnologia microesistema ecografico, dal trasdutlettronica come anche delle buone proprietà meccaniche del silicio utilizzato
tore fino alla produzione dell’imcome substrato e del nitruro di silicio di cui sono costituite le micromembrane.
magine volumetrica. Si tratta di
Inoltre, se si escludono i costi di sviluppo più elevati rispetto alla classica tecnoun problema complesso, per il
logia piezoelettrica, la produzione risulta notevolmente più economica, affidabile
quale non esistono applicazioni
e riproducibile.
117
ECOGRAFIA 3D IN TEMPO REALE
CASPUR ANNUAL REPORT EDIZIONE 2009
integrate e che quindi richiederebbe l’uso di software differenti per le varie parti
del sistema.
Presso l’Università di Roma 3 è stato sviluppato e validato un prototipo di applicazione in Matlab, che simula il comportamento dell’elettronica di beam-forming e di ricostruzione dell’immagine di un bersaglio sintetico. Per la simulazione
del trasduttore ultrasonico è stato utilizzato il modulo Field II 1, che simula analiticamente la generazione e la rivelazione di campi acustici. L’applicazione, che già
utilizza una parallelizzazione coarse-grained, impiega comunque 30 giorni su 4
processori per generare un’immagine ecografica virtuale, un tempo eccessivo per
il processo di ottimizzazione, che richiede la simulazione di un numero elevato di
casi, al variare dei parametri progettuali. Il gruppo si è rivolto al CASPUR, il cui
personale sta collaborando ad ottimizzare il codice e ad aumentarne il grado di
parallelismo, per renderlo utilizzabile sul nuovo cluster Matrix a 2048 core, ed abbattere drasticamente il tempo necessario per ogni simulazione.
Figura 3
Un trasduttore cMUT realizzato
presso l’Università di Roma Tre:
il dispositivo (a) è costituito da
migliaia di celle elementari (b).
a)
b)
1
118
http://server.oersted.dtu.dk/personal/jay/field.