Augusto Ajovalasit
Analisi sperimentale
delle tensioni con la
FOTOMECCANICA
Fotoelasticità, moiré, olografia
speckle, correlazione immagini
Seconda edizione
Copyright © MMIX
ARACNE editrice S.r.l.
www.aracneeditrice.it
[email protected]
via Raffaele Garofalo, 133 A/B
00173 Roma
(06) 93781065
ISBN
978–88–548–2453–9
I diritti di traduzione, di memorizzazione elettronica,
di riproduzione e di adattamento anche parziale,
con qualsiasi mezzo, sono riservati per tutti i Paesi.
Non sono assolutamente consentite le fotocopie
senza il permesso scritto dell’Editore.
I edizione: giugno 2006
II edizione: aprile 2009
INDICE
PRESENTAZIONE
PARTE 1 – FOTOELASTICITÀ
1. INTRODUZIONE
1.1 I metodi della Meccanica Sperimentale
1.1.1 Definizioni
1.2 Presentazione della fotoelasticità
1.2.1 Sviluppo storico della fotoelasticità
1.2.2 La fotoelasticità bidimensionale
2. L’EFFETTO FOTOELASTICO
3. LA LUCE POLARIZZATA
3.1. I vari tipi di luce polarizzata
3.1.1 Luce polarizzata piana
3.1.2 Luce polarizzata circolarmente
3.1.3 Luce polarizzata ellitticamente
3.2 Intensità luminosa della luce polarizzata
3.3 Il calcolo matriciale di Jones
3.3.1 Il polarizzatore piano
3.3.2 Il modello fotoelastico
3.3.3 Il ritardatore ottico
4. OTTICA DEL POLARISCOPIO
4.1 Il polariscopio piano ad assi incrociati
4.2 Il polariscopio piano ad assi paralleli
4.3 I polariscopi circolari
4.3.1 Il polariscopio circolare a campo scuro
4.3.2 Il polariscopio circolare a campo chiaro
4.3.3 Polariscopi circolari equivalenti
4.4 Riassunto sull’uso dei polariscopi piani e circolari
4.5 Uso della luce bianca in fotoelasticità
4.5.1 Distribuzione spettrale
5. I METODI DI COMPENSAZIONE
5.1 Generalità sulla determinazione del ritardo generico
5.2 Compensazione goniometrica di Tardy
5.2.1 Procedura pratica di compensazione di Tardy
5.3 Compensazione goniometrica di Sénarmont
5.4 I compensatori
5.4.1 Procedura pratica di compensazione in luce bianca
5.5 Il segno della tensione tangente al contorno: uso del compensatore e
prova del chiodo
5.5.1 Uso del compensatore
5.5.2 Prova del chiodo
6. IL RILIEVO MANUALE DEI DATI FOTOELASTICI
6.1 Il rilievo manuale delle isocromatiche
VII
1.1
1.1
1.1
1.1
1.2
1.3
1.5
1.9
1.10
1.10
1.11
1.11
1.13
1.14
1.16
1.17
1.19
1.21
1.21
1.23
1.25
1.25
1.26
1.27
1.28
1.28
1.29
1.33
1.33
1.35
1.33
1.35
1.36
1.37
1.37
1.37
1.37
1.39
1.39
II
A. Ajovalasit – Fotomeccanica
6.1.1 Effetto delle tensioni iniziali sulle isocromatiche
6.2 La taratura dei materiali fotoelastici
6.2.1 NOTA – La dispersione della birifrangenza
6.2.2 La taratura a trazione
6.2.3 La taratura a flessione
6.2.4 La taratura mediante disco compresso
6.3 Il rilievo manuale delle isocline
6.3.1 Proprietà delle isocline
6.3.2 Classificazione dei punti isotropi in base all’andamento delle isocline
7. LA FOTOELASTICITÀ DIGITALE
7.1 Generalità sul rilievo automatico dei dati fotoelastici
7.2. Il sistema di acquisizione
7.3. La fotoelasticità RGB
7.3.1 Uso di più lunghezze d’onda
7.3.2 La fotoelasticità RGB (in luce bianca)
7.4 La fotoelasticità a variazione di fase
7.4.1.Determinazione del solo parametro dell’isoclina
7.4.2. Determinazione del solo ritardo δ
7.4.3.Determinazione del parametro dell’isoclina e del ritardo δ
7.5 Il metodo della trasformata di Fourier
7.5.1. Il metodo della trasformata di Fourier senza frange di riferimento
7.5.2. Il metodo della trasformata di Fourier con frange di riferimento
8. L’ELABORAZIONE DEI RISULTATI FOTOELASTICI
8.1 L’elaborazione delle isocline: le isostatiche
8.1.1 Andamento delle isostatiche in corrispondenza dei punti isotropi
8.1.2 Equazioni di equilibrio di Lamé-Maxwell
8.2 L’interpretazione delle isocromatiche
9. LA SEPARAZIONE DELLE TENSIONI
9.1 Metodi basati sulle equazioni di equilibrio di Lamé-Maxwell
9.2 Metodi basati sulle equazioni di equilibrio in coordinate cartesiane
9.3 Metodi basati sull’equazione di compatibilità
9.3.1 La determinazione della somma delle tensioni ai contorni
9.3.2 La soluzione numerica dell’equazione di Laplace
9.4 Metodi basati sulla legge di Hooke
9.5 Il metodo dell’incidenza obliqua
10. IL TRASFERIMENTO DEI RISULTATI DAL MODELLO AL PROTOTIPO
10.1 Strutture elastiche
10.1.1 Le condizioni di similitudine
10.1.2 Le formule di trasferimento
10.2 Strutture elastiche lineari
10.3 – Influenza del coefficiente di Poisson nel caso piano
11. LA FOTOELASTICITÀ TRIDIMENSIONALE
11.1 L’effetto fotoelastico nel caso tridimensionale
11.2 Il metodo del congelamento delle tensioni
11.3 Analisi del modello tridimensionale congelato
12. I RIVESTIMENTI FOTOELASTICI
12.1 Le deformazioni e le tensioni
12.2 L’effetto fotoelastico nel rivestimento
1.39
1.39
1.40
1.41
1.41
1.42
1.42
1.43
1.44
1.45
1.45
1.45
1.47
1.47
1.48
1.50
1.50
1.52
1.53
1.54
1.54
1.55
1.57
1.57
1.59
1.59
1.60
1.61
1.61
1.62
1.63
1.63
1.64
1.64
1.64
1.65
1.65
1.66
1.67
1.67
1.68
1.69
1.70
1.71
1.72
1.73
1.73
1.73
Indice
III
12.2.1 Esame al polariscopio circolare: le isocromatiche
12.2.2 Esame al polariscopio piano ad assi incrociati: le isocline
12.3 La determinazione delle tensioni nella struttura
12..3.1 Materiali isotropi
12.3.2 Materiali compositi
12.4Scelta dello spessore del rivestimento
12.4.1 Il gradiente di deformazione nello spessore
12.4.2 Influenza dei coefficienti di Poisson
12.5 Effetto rinforzante del rivestimento
12.5.1Coefficiente correttivo per stato piano di tensione
12.5.2 coefficiente correttivo per piastre inflesse
12.6 Le tecniche sperimentali (cenni)
12.6.1 L’applicazione del rivestimento
12.6.2 Il rilievo dei dati fotoelastici
13. I MATERIALI FOTOELASTICI
14. BIBLIOGRAFIA
1.73
1.74
1.74
1.75
1.75
1.76
1.76
1.77
1.78
1.79
1.79
1.80
1.80
1.80
1.81
1.83
PARTE 2 – METODI MOIRÉ
1. INTRODUZIONE
1.1 Tipo di informazione sperimentale
1.2 Sviluppo storico
2. L'EFFETTO MOIRÉ GEOMETRICO
2.1 Le griglie
2.2 Frange moiré nel caso di griglie allineate aventi lo stesso passo
2.3 Frange moiré nel caso di griglie allineate aventi passi differenti
2.3.1 Deformazioni lagrangiane ed euleriane
2.3.2 Riconoscimento del segno della deformazione
2.4 Frange moiré nel caso di griglie inclinate aventi passi uguali
2.5 Frange moiré nel caso di griglie inclinate aventi passi differenti
2.6 Frange moiré nel caso di deformazione non omogenea
3. LA DETERMINAZIONE DELLE DEFORMAZIONI
4. TECNICHE MOIRÉ
4.1. Le tecniche di mismatch
4.1.1 Mismatch di passo
4.1.2 Mismatch di rotazione
4.2. La determinazione delle frange di ordine frazionario
4.3. La moltiplicazione delle frange moiré
5. LA NUMERAZIONE DELLE FRANGE MOIRÉ
5.1 Numerazione assoluta
5.2 Numerazione relativa
5.3 Determinazione del segno della derivata
5.3.1 Mismatch di passo
5.3.2 Mismatch di rotazione
5.3.3 Traslazione della griglia di riferimento
6. RIPRODUZIONE E SOVRAPPOSIZIONE DELLE GRIGLIE
6.1 Riproduzione delle griglie
6.2 Sovrapposizione delle griglie
6.2.1 Visibilità delle frange moiré
7. MOIRÉ PER LASTRE INFLESSE
2.1
2.1
2.2
2.5
2.5
2.6
2.6
2.8
2.9
2.10
2.11
2.12
2.13
2.14
2.14
2.14
2.16
2.16
2.17
2.18
2.18
2.18
2.19
2.19
2.20
2.20
2.20
2.20
2.20
2.22
2.25
IV
A. Ajovalasit – Fotomeccanica
8. MOIRÉ OMBRA
8.1. Illuminazione ed osservazione in luce parallela
8.2 Illuminazione ed osservazione in luce puntiforme
9. INTERFEROMETRIA MOIRÈ
9.1 Generalità
9.2 Interferometria moiré: spiegazione elementare
9.3 Richiami di ottica riguardanti l’interferometria moiré
9.3.1 Interferenza
9.3.2 Griglie di diffrazione
9.4 Interferometria moiré: spiegazione più rigorosa
9.5 Sensibilità
9.6 Tecniche sperimentali
9.6.1 La griglia del modello
9.6.2 – Disposizioni sperimentali
10. CONSIDERAZIONI FINALI
10.1 Campi tensionali esaminabili
10.2 Materiali esaminabili
10.3 Altre caratteristiche
11 APPENDICE - Espressioni generali delle deformazioni
12. BIBLIOGRAFIA
2.26
2.27
2.28
2.29
2.29
2.29
2.30
2.30
2.32
2.34
2.36
2.36
2.36
2.37
2.38
2.38
2.38
2.38
2.39
2.40
PARTE 3 – OLOGRAFIA
1. INTRODUZIONE
1.1 Sviluppo storico
2. PRINCIPI FISICI DELL’OLOGRAFIA
2.1 Fotografia
2.2 Olografia
2.2.1 Registrazione dell’ologramma
2.2.2 Ricostruzione dell’ologramma
3. LE EQUAZIONI DELL’OLOGRAFIA
3.1 Registrazione dell’ologramma
3.2 Ricostruzione dell’ologramma
3.2.1 Inversione delle immagini
4. DISPOSIZIONI SPERIMENTALI
4.1 Schemi dei banchi per olografia
5. CARATTERISTICHE DEI COMPONENTI
5.1 Generalità
5.2 Le sorgenti per olografia
5.2.1 L’intensità luminosa
5.3 I ricevitori per olografia
5.3.1 La risoluzione del ricevitore
5.3.2 La linearità del ricevitore
5.4 Lenti e filtri spaziali
5.5 Specchi e semispecchi
5.6 Il banco per olografia: requisiti di stabilità meccanica
6. L'INTERFEROMETRIA OLOGRAFICA
6.1 Interferometria olografica ad esposizione singola
6.1.1 Analisi quantitativa
6.2 Interferometria olografica ad esposizione doppia
3.1
3.1
3.1
3.2
3.3
3.4
3.4
3.4
3.4
3.5
3.7
3.7
3.7
3.8
3.8
3.8
3.10
3.10
3.10
3.11
3.13
3.14
3.14
3.15
3.15
3.16
3.17
Indice
6.2.1 Analisi quantitativa
6.3 Interferometria olografica a media temporale
6.3.1 Numerazione delle frange
6.3.2 Luminosità delle frange chiare
6.4 Riassunto
7. DETERMINAZIONE DEGLI SPOSTAMENTI
7.l – Relazione ritardo – spostamento
7.2 Relazione vettoriale
7.3 Determinazione degli spostamenti nel caso piano
7.3.1 Numerazione assoluta delle frange
7.3.2 Numerazione relativa delle frange
7.3.3 Determinazione indipendente delle componenti dello spostamento
7.3.4 Considerazioni sulla sensibilità
7.4 Determinazione degli spostamenti nel caso tridimensionale
7.4.1 Numerazione assoluta delle frange
7.4.2 Numerazione relativa delle frange
8. APPENDICE A: OLOGRAFIA DIGITALE
8.1 Caratteristiche del ricevitore (CCD)
8.2 Interferometria olografica digitale
8.3 Caratteristiche dell’olografica digitale
9. APPENDICE B: OLOGRAFIA IN LUCE BIANCA
9.1 – Ologramma di Denisyuk
9.1.1 Principio
9.1.2 Realizzazione dell’ologramma di volume
9.1.3 Impiego in interferometria
9.2 – Ologramma arcobaleno
10. BIBLIOGRAFIA
V
3.18
3.19
3.19
3.20
3.21
3.22
3.22
3.23
3.24
3.25
3.25
3.25
3.26
3.26
3.27
3.28
3.28
3.29
3.29
3.30
3.30
3.31
3.31
3.31
3.31
3.31
3.34
PARTE 4 – METODI SPECKLE
1. INTRODUZIONE
1.1 Tipo di informazione sperimentale
1.2 Caratteristiche
2. L’EFFETTO SPECKLE
2.1 Lo speckle oggettivo
2.2 Lo speckle soggettivo
2.3 Effetto degli spostamenti sullo speckle: basi della metrologia speckle
2.3.1 Introduzione al metodo basato sulla correlazione di immagini speckle (DSC)
2.3.2 Introduzione all’interferometria speckle
3. INTERFEROMETRIA SPECKLE
3.1 Misura della componente di spostamento fuori del piano –1° metodo
3.1.1 Relazione tra ritardo e spostamento
3.2 Misura della componente di spostamento fuori del piano –2° metodo
3.2.1 Relazione tra ritardo e spostamento
4.114
3.3 Misura della componente di spostamento nel piano
4 INTERFEROMETRIA SPECKLE TIPO SHEARING
4.1 Relazione tra ritardo e derivate degli spostamenti
4.2 Determinazione delle rotazioni
4.3 Determinazione delle deformazioni
4.1
4.1
4.2
4.3
4.3
4.4
4.6
4.6
4.7
4.7
4.7
4.9
4.10
4.11
4.13
4.14
4.14
4.15
VI
A. Ajovalasit – Fotomeccanica
5. INTERFEROMETRIA SPECKLE A VARIAZIONE DI FASE
5.1 Il metodo a variazione di fase in generale
5.2 Applicazione del metodo a variazione di fase all’interferometria speckle
5.5 Disposizioni sperimentali
6.CONSIDERAZIONI SULL’INTERFEROMETRIA SPECKLE
7. BIBLIOGRAFIA
4.15
4.16
4.16
4.19
4.19
4.20
PARTE 5 – METODI A CORRELAZIONE DI IMMAGINI DIGITALI
1. INTRODUZIONE
2. IL METODO DIC/2D
2.1 Principio del metodo
2.2 Meccanica del continuo
2.2.1 Spostamenti
2.2.2 Deformazioni
2.3 Correlazione delle immagini (2D)
2.3.1 Il calcolo della funzione di correlazione
3. TECNICHE SPERIMENTALI
3.1 Preparazione della superficie da analizzare
3.2 L’acquisizione delle immagini
3.3 Prestazioni dei sistemi DIC
4. CORRELAZIONE DELLE IMMAGINI IN 3D (cenni)
4.1 Caratteristiche del sistema di acquisizione delle immagini
4.1.1 La taratura delle telecamere
4.2 La determinazione del forma di un corpo
4.3 Determinazione del campo degli spostamenti
4.4 Ulteriori considerazioni sulla correlazione in 3D
4.4.1 Determinazione della forma
4.4.2 Determinazione del campo degli spostamenti
5. APPENDICI
5.1 Appendice A - Espressioni generali delle deformazioni
5.2 Appendice B - Correlazione tra sub-immagini
6. BIBLIOGRAFIA
5.1
5.1
5.1
5.3
5.3
5.5
5.6
5.9
5.11
5.11
5.13
5.12
5.14
5.15
5.16
5.16
5.17
5.18
5.18
5.18
5.20
5.20
5.21
5.22
PARTE 6 - APPENDICI
1. APPENDICE A – PROSPETTIVE DELLA FOTOMECCANICA
1.1 Evoluzione della scala di misura: dal macro al micro e al nano
1.2 Bibliografia
2. APPENDICE B – LA FOTOMECCANICA DIGITALE
2.1 Introduzione
2.2 Il metodo a variazione di fase
2.2.1 Uso di tre acquisizioni
2.2.2 Uso di tre acquisizioni
2..3 Il metodo della trasformata di Fourier
2.4 Bibliografia
6.1
6.1
6.2
6.2
6.2
6.2
6.3
6.4
6.4
6.4
PARTE 7: INDICE ANALITICO
7.1
VII
PRESENTAZIONE
I metodi della Meccanica Sperimentale consentono l'analisi dello stato di deformazione e di
tensione nei componenti e nelle strutture.
I principali metodi della meccanica sperimentale impiegati nell’analisi sperimentale delle
tensioni sono:
• l'estensimetria mediante estensimetri elettrici a resistenza (ER),
• la fotomeccanica,
• i metodi basati sull'effetto termoelastico,
• i metodi basati sulla diffrazione dei raggi X,
• altri metodi (metodo del reticolo, caustiche, vernici fragili, sensori a fibra ottica,
acustoelasticità, etc.).
Questo volume tratta i metodi della Fotomeccanica che, insieme agli Estensimetri elettrici a
resistenza, costituiscono il nucleo principale del corso di Analisi sperimentale delle tensioni,
che svolgo presso la Facoltà di Ingegneria dell’Università di Palermo dall’anno accademico
1969-1970.
Questa II edizione differisce dalla precedente del 2006 per alcuni aggiornamenti riguardanti
essenzialmente l’olografia digitale, i metodi a correlazione di immagini e le appendici
concernenti le prospettive della fotomeccanica e la fotomeccanica digitale.
Il volume è particolarmente indirizzato agli studenti dei corsi di laurea e di laurea
specialistica/magistrale, con un impegno di 3-5 crediti formativi universitari in dipendenza
dell’approfondimento dei temi trattati e dell’attività di laboratorio.
Esso può risultare utili anche a coloro che operano nel campo della ricerca, del collaudo e del
controllo in esercizio di materiali, componenti e strutture e a coloro che intendono conseguire
la certificazione, ai livelli 2 e 3, in Estensimetria quale Personale esperto nei controlli con
estensimetri elettrici a resistenza.
Palermo, marzo 2009
***
A. Ajovalasit – Fotomeccanica
VIII
I METODI DELLA FOTOMECCANICA
La Fotomeccanica è l’insieme dei metodi ottici di Analisi sperimentale delle tensioni. Essa
comprende:
1. la fotoelasticità,
2. i metodi del moiré (geometrico ed interferometrico),
3. l’olografia (interferometria olografica),
4. i metodi speckle (fotografia speckle e interferometria speckle),
5. i metodi a correlazione di immagini digitali (DIC = Digital Image Correlation).
Alla Fotomeccanica appartengono altresì altri metodi di uso più ristretto quali il metodo del
reticolo e il metodo delle caustiche.
La tabella 1 mostra una cronologia sintetica riguardante i metodi della fotomeccanica con
l’indicazione di alcuni Precursori e Pionieri delle varie tecniche.
Tabella 1 - Cronologia dei metodi della fotomeccanica
ANNO
1900
1950
1960
1970
1980
1990
2000
2010
2020
TECNICHE
PRECURSORI e PIONIERI
Fotoelasticità
Brewster (1815),
Mesnager (1901), Filon (1902), Coker (1910),
Hetényi (1938), Drucker e Mindlin (1940),
Manzella (1942)
Metodi del moiré geometrico Lord Rayleigh (1874), A. Righi (1887)
Tolenaar (1945), Dantu (1954)
Morse, Durelli e Sciammarella (1961), Theocaris
(1969), Pirodda (1969), Durelli e Parks (1970)
Olografia
Gabor (1948)
Leith e Upatnieks (1961)
Metodi speckle
Archbold, Burch, Ennos & Taylor (1969), Butters
& Leendertz (1971)
Interferometria moiré
Lord Rayleigh (1874), A. Righi (1887)
Post (≈1985)
Metodo a correlazione di Peters e Ranson (1981), Sutton
immagini digitali
Fotomeccanica digitale:i metodi Per la fotoelasticità: Muller e Saackel (1979), Seguchi,
di acquisizione ed elaborazione tomita e Watanabe (1979), Voloshin. e Burger (1983),
automatica delle immagini nella Sanford e Iyengar (1885), Hecker e Morche (1986)
fotomeccanica
Micro/Nano fotomeccanica
Han e Post (1992), Dally e Read (1993)
Vendroux e Knauss [per le tecniche DIC, (1998)]
?
La tabella 2 mostra sinteticamente le caratteristiche dei vari metodi della fotomeccanica con
riferimento ai seguenti aspetti: tipo di informazione sperimentale, campi tensionali
esaminabili, complessità delle apparecchiature, materiali esaminabili, risoluzione. Per
confronto sono riportate le caratteristiche relative agli estensimetri elettrici a resistenza.
IX
Presentazione
Tabella 1.2 - Caratteristiche dei metodi della Fotomeccanica
[per confronto si riportano quelle degli estensimetri (ER)]
Infor
mazio
ne
speri
men
tale
Campo
tensio
nale
Metodo ⇒
Caratteristiche⇓
Spostamenti nel
piano: u, v
Spostamenti fuori dal
piano: w
Rotazioni: φ x, φy
Deformazione: ε
Diff. tens. princ.
(def principali)
Somma tens.
princ.(def. princ.)
Isocline
Isostatiche
Bidimensionale
Tridimensionale
(interno)
Tridimensionale
(superficie)
Elastico
Plastico
Metodo a campo intero
Altre
carat
teri
stiche
Complessità
apparecchiature
Materiale:
Preparazione e
limitazioni
Risoluzione indicativa
in μm/m per ε
(in μm per u,v, w)
Fotoel.
Moire
Ologr.
Speckle
DIC
***
G,I,O
***
O,P
***, R
**
***
Sf, Si
***
Si
***, Ssi
***
***
ER
***
(DIC/3D)
***
***
***
(1)
***
***
(2)
***
***
Ft
***
Ft,Rb
***
**
Rb
SI
II
Birifr.
Fp,Ft
5
Fotoel.
***
**
(4)
***
(6)
***
***
***
***
***
***
**
(3)
***
***
***
***
**
***
**
***
(DIC/3D)
**
***
***
***
SI
SI
SI (Si)
SI
NO
I/II (G, P)
IV(I)
III/I(O)
Finitura
specul. (R)
(0,5)I,O
(20) G
(100) P
Moire
III
III
I
I
I
I
II
I
(0,5)
(0,5)Si
(5)Sf
Ologr.
Speckle
200
(20)
(7)
DIC
1
ER
Simboli: *** adatto, ** poco adatto o adatto con limitazioni, grado di complessità: crescente da I a IV
Simboli DIC (Digital Image Correlation): DIC/3D metodo a correlazione di immagini
(tridimensionale). Simboli: fotoelasticita': Fp = fotoelasticità piana, Ft = fotoelasticità
tridimensionale, Rb= rivestimenti birifrangenti.. Simboli moiré: G= geometrico piano, I =
Interferometrico, O = Olografico, P = Ombra (o Proiezione), R = riflessione. Simboli speckle:
Sf = fotografia speckle, Si = interferometria speckle; Ssi = interferometria speckle tipo
"shearing".
NOTE: (1) materiali trasparenti soggetti a stato piano di tensione; (2) mediante elaborazione diretta della
isocline; (3) tecnica degli estensimetri inglobati; (4) mediante griglia annegata in materiale trasparente; (5) in
congiunzione con la tecnica di rimozione degli strati; (6) nel caso del moiré piano la griglia si applica su di una
superficie piana del componente da studiare; (7) valori indicativi di alcuni sistemi commerciali relativi alla
tecnica DIC (2008), per gli spostamenti la risoluzione, espressa di solito in pixel, è dell’ordine di 0,02 pixel.
X
A. Ajovalasit – Fotomeccanica
A parte la fotoelasticità, la cui informazione sperimentale è direttamente legata alla differenza
delle deformazioni/tensioni principali, gli altri metodi sono sensibili al campo degli
spostamenti (moiré, interferometria olografica, speckle) o delle rotazioni (moiré per lastre
inflesse, interferometria speckle tipo shearing), mentre i metodi basati sulla correlazione delle
immagini (DIC) consentono di determinare contestualmente il campo degli spostamenti e
delle deformazioni. I metodi basati sulla determinazione diretta degli spostamenti richiedono
un’operazione di derivazione numerica per il calcolo della deformazione.
Le tecniche che forniscono le componenti degli spostamenti e delle rotazioni differiscono
principalmente:
• per la complessità delle apparecchiature,
• per la preparazione della superficie da analizzare,
• per la risoluzione.
La complessità delle apparecchiature è in ordine crescente la seguente:
• bassa per le tecniche DIC, che richiedono solo l’impiego di una o due telecamere
rispettivamente per la DIC/2D (bidimensionale) e 3D (tridimensionale) e in genere
nessuna apparecchiatura particolare per la preparazione della superficie, tali tecniche
richiedono però un software adeguato (generalmente di costo elevato) per la
correlazione delle immagini;
• media per i metodi del moiré geometrico e ombra che, in aggiunta alla telecamera
richiedono la disponibilità di griglie di opportuna frequenza;
• elevata per i metodi interferometrici (interferometria olografica e speckle) che
richiedono, in aggiunta ad un opportuno banco ottico, un laser;
• ancora più elevata per l’interferometria moiré che richiede, in aggiunta a quanto
necessario per i metodi interferometrici, anche la riproduzione ed il trasferimento di
griglie di fase ad elevata frequenza.
La preparazione della superficie è di difficoltà:
• nulla o minima per il moiré ombra, l’olografia e i metodi speckle che al più richiedono
la semplice verniciatura (bianca della superficie)
• intermedia per i metodi DIC che richiedono una distribuzione random di zone nere su
fondo bianco (ottenibile per esempio con una doppia verniciatura)
• elevata, ad eccezione del moiré ombra, per i metodi moiré dove in genere è richiesto il
trasferimento di una griglia sulla superficie del corpo da analizzare.
La risoluzione è molto variabile, essa infatti è dell’ordine di:
• 0.5 μm per l’interferometria sia moiré, sia olografica, sia speckle;
• 20 μm per il moiré geometrico e per la tecnica DIC (dell’ordine di 0,02 pixel);
• 100 μm per il moiré ombra.
La tabella serve per una scelta preliminare del metodo da utilizzare in funzione della specifica
applicazione. Il volume fornisce le caratteristiche specifiche delle varie tecniche per una scelta
definitiva. Esso è suddiviso nelle seguenti 6 parti con numerazione e bibliografia proprie:
PARTE 1 – Fotoelasticità
PARTE 2 – Metodi del moiré
PARTE 3 – Olografia
PARTE 4 – Metodi speckle
PARTE 5 – Metodi a correlazione di immagini digitali
PARTE 6 – Appendici: A – Prospettive della fotomeccanica, B – Fotomeccanica digitale
Fotoelasticità: 1. Introduzione
1.1
PARTE 1 - FOTOELASTICITÀ
1. INTRODUZIONE
1.1 I metodi della fotomeccanica
Questo volume riguarda, come già detto, i seguenti metodi della Fotomeccanica:
PARTE 1 – Fotoelasticità, PARTE 2 – Metodi del moiré, PARTE 3 – Olografia, PARTE 4 –
Metodi speckle, PARTE 5 – Metodi a correlazione di immagini digitali.
Una bibliografia essenziale sulla Fotomeccanica è riportata nei riferimenti [1.1-1.9]. In
particolare una breve rassegna dei principali metodi della fotomeccanica è riportata nel
riferimento [1.8]. Per la bibliografia specifica si rimanda a quella riportata alla fine di
ciascuna delle parti in cui è diviso il volume.
1.1.1 Definizioni
Nel seguito si riportano alcune definizioni di uso comune in Fotomeccanica ed in altri metodi
di Analisi sperimentale delle tensioni:
Isobara
Isoclina
Isocromatica
Isoentatica
Isopaca
Isostatica
Isostrofica
Isoterma
Isotetica
luogo dei punti in cui è costante il valore di una tensione
luogo dei punti in cui è costante l’orientamento delle tensioni principali
luogo dei punti in cui è costante la differenza delle tensioni principali
luogo degli estremi delle fratture (metodo delle vernici fragili)
luogo dei punti in cui è costante la somma delle tensioni principali
traiettoria di una tensione principale
luogo dei punti in cui è costante una componente della rotazione
luogo dei punti a temperatura costante
luogo dei punti in cui è costante una componente di spostamento
1.2 Presentazione della fotoelasticità
La fotoelasticità si basa sul fenomeno noto come birifrangenza accidentale meccanica
cioè sulla dipendenza degli indici di rifrazione di taluni materiali trasparenti non cristallini
dallo stato di tensione. Tale fenomeno noto dal 1816 (Brewster) ha trovato applicazione
pratica a partire dal 1900 (Mesnager).
La fotoelasticità è un metodo ottico a campo intero che si basa sulla determinazione delle
isocline (luogo dei punti nei quali è costante l'orientamento delle tensioni principali) e delle
isocromatiche (luogo dei punti nei quali è costante la differenza delle tensioni principali).
Le tecniche principali sono:
• la fotoelasticità piana o bidimensionale (a trasmissione) adatta all’analisi degli stati
piani di tensione in campo elastico lineare impiegando modelli piani in materiale
birifrangente;
• la fotoelasticità tridimensionale (a trasmissione) che consente, con la tecnica del
congelamento delle tensioni, l’analisi di corpi tridimensionali in campo elastico lineare
impiegando modelli birifrangenti;
• la tecnica dei rivestimenti birifrangenti (a riflessione) adatta all’analisi dello stato di
tensione alla superficie di componenti in materiale qualsiasi (acciaio, alluminio, etc.).
In aggiunta ai libri di analisi sperimentale delle tensioni riportati nei riferimenti generali,
esistono numerosi opere dedicate esclusivamente alla fotoelasticità: dai classici trattati di
Coker e Filon /1.2.1/ e di Frocht /1.2.2/ alle altre opere /1.2.3-1.2.16/.
1.2
A. Ajovalasit – Fotomeccanica: parte 1
1.2.1 Sviluppo storico della fotoelasticità
Dopo la scoperta della birifrangenza accidentale meccanica da parte di Sir David Brewster
(1816) si sviluppano le ricerche su tale fenomeno come si può rilevare dall’esame della
scheda bibliografica riportata nel seguito (Tabella 1.I).
Tabella 1.I - Fotoelasticità: scheda cronologica
ANNO
ARGOMENTO
AUTORE
BIBL.
Sir David Brewster
1902
1910
1930
1931
1935
1936
Scoperta del fenomeno noto come birifrangenza
accidentale meccanica, cioè dell’effetto fotoelastico
Teoria, in termini di deformazioni, dell’effetto
fotoelastico. Lavoro precursore sulla fotoelasticità
integrata
Scoperta sperimentale della relazione tra la
differenza degli indici di rifrazione e la differenza
delle deformazioni (tensioni) principali, cioè della
cosiddetta legge di Wherteim
Teoria, in termini di tensioni, dell’effetto
fotoelastico
Determinazione delle costanti fotoelastiche del
vetro
Ricerche pionieristiche di fotoelasticità riguardanti
il modello fedele (realizzato in vetro) di un ponte e
la realizzazione di un estensometro laterale per
determinare la somma delle tensioni principali.
Scoperta della dispersone della birifrangenza
Memoria sulla determinazione ottica delle tensioni
Lavoro pionieristico sui rivestimenti birifrangenti
Primo trattato sulla Fotoelasticità
Libro sulla fotoelasticità
Fotoelasticità dinamica
1937
Estensimetro fotoelastico
Oppel, G.U.
1938
Basi
sperimentali
della
fotoelasticità Hetényi, M.
tridimensionale
Le Boiteux, H., Boussard, R.
Libro sulla fotoelasticità
Basi teoriche della fotoelasticità tridimens.
Drucker,
D.C., [8.9]
1816
1841
1851- 54
1853
1888-1889
1901-1902
1939
1940
Neumann F.E.
Wherteim M. G.
[1.2.1]
pag. 204
Maxwell, J.C.
[6.3]
in
[1.2.13]
[1.2.1]
a
pag. 210
[6.5,6] in
[1.2.13]
Kerr,J.
Pockels, F.
Mesnager, A.
Filon, L.N.G.
Coker, E.G.
Mesnager, A.
a
[1.2.1] p.220
[1.2.1]p.699
[6.7] in [1.2.13]
Coker, E.G., Filon, L.N.G.
[1.2.1]
Foppl, L. - Neuber, H.: [1.2.3]
[119]
Tuzi, Z., Nitida, M.
in
[1.1.1] p.971
[12.2]
in
[1.2.13]
[1.2.13]
p.309
Mindlin, R.D.
Mesmer, G.
Frocht, M.M.
Manzella, G.
Drucker, D.C.,
[1.2.13]
[1.2.11]
1940
1941
1942
1943
Libro sulla fotoelasticità
Classico trattato sulla fotoelasticità
Elementi di fotoelasticità
Il metodo dell’incidenza obliqua
1955
Sviluppo dei rivestimenti birifrangenti
D’Agostino, J., Drucker, D.C.
, Liu, C.K., Mylonas, C.
1958
1966
1968
Libro sulla fotoelasticità
La fotoelasticità integrata (tomografia fotoelastica)
La fotoelasticità olografica
Mondina, A.
Aben, H.
1979
[6.1]
in
[1.2.13]
[6.2]
in
[1.2.13]
in
[1.2.2]
[1.2.4]
[74]
in
[1.1.1] p.969
[1.2.6]
[1.2.12]
Fourney, M.E., Hovanesian, [11.40,41]
J.D., Brcic, V., Powell, R.L. in [1.2.13]
Inizio dello sviluppo dei metodi di fotoelasticità Mueller, R.K., Saackel, [1.2.20]
automatica (digitale): il metodo del centro frangia
L.R.
Fotoelasticità: 1. Introduzione
1.3
Infatti Neumann, nel 1841, formulò la prima teoria sull’effetto fotoelastico fornendo le
relazioni che legano gli indici di rifrazione alle deformazioni applicate al corpo.
Successivamente Maxwell (1853) fornì una sua teoria dell’effetto fotoelastico mettendolo in
relazione alle tensioni anziché alle deformazioni. Entrambi i lavori, di Neuman e di Maxwell,
si riferivano a corpi sollecitati in campo elastico lineare e quindi le due teorie sono
equivalenti. Contestualmente all’attività di Maxwell, Wertheim scoprì per via sperimentale la
relazione tra la differenza degli indici di rifrazione e la differenza delle deformazioni
(tensioni) principali (legge di Wherteim).
A partire dal 1900, a seguito dei lavori di Mesnager in Francia e di Coker e Filon in Gran
Bretagna si sviluppano le applicazioni pratiche per le quali si rimanda alla bibliografia. La
tabella 1.I mostra solo alcuni aspetti dello sviluppo della fotoelasticità. Per gli aspetti non
trattati si rimanda all’ampia bibliografia, in particolare ai riferimenti bibliografici contenuti
nei libri riportati in [1.1.1], [1.2.1] e [1.2.13]. Molte memorie sulla fotoelasticità sono
rintracciabili nel volume [1.2.15]. Molti contributi italiani, anteriori al 1931, sono citati nel
trattato di Coker e Filon [1.2.1]: si ricordano L. Rolla (1907) O.M. Corbino (1909), P. Rossi
(1910), ), G.M. Pugno (1925), G. Colonnetti (1926), D. Graffi (1926) ed E. Volterra (1930).
Tra il 1935 e il 1965 si verifica il massimo sviluppo della fotoelasticità sia in campo
metodologico sia in campo applicativo. Basta ad esempio consultare la mole dei risultati
concernenti i coefficienti di forma molti dei quali furono appunto determinati mediante la
fotoelasticità. Si ricorda inoltre, sempre a titolo di esempio e in aggiunta all’opera dei pionieri
sopra indicati, l’attività di Drucker, Mindlin, Frocht, Durelli e Zandman negli Stati Uniti, di
Manzella e Mondina in Italia, di Mesmer, Foppl, Monch, Kuske e Wolf in Germania, di
Jessop, Fessler ed Heywood in Gran Bretagna, di Aben in Estonia, di Favré in Svizzera, di
Kammarer, Le Boiteux e Boussard in Francia, di Pirard in Belgio, di Theocaris in Grecia.
In questo periodo la fotoelasticità supplisce egregiamente all’assenza di metodi numerici
che iniziano a svilupparsi solo intorno al 1960. A partire dagli anni 70, con il consolidarsi dei
metodi numerici, la fotoelasticità viene utilizzata:
• quale metodo di controllo per la validazione dei risultati numerici,
• per l’analisi sui componenti realizzati direttamente con i materiali strutturali previsti
(materiali metallici, compositi, etc.) utilizzando la tecnica dei rivestimenti
birifrangenti (a riflessione),
• per il controllo non distruttivo e l’analisi delle tensioni di componenti in materiale
birifrangente (vetri e materie plastiche) [1.2.14, 1.2.17-1.2.19’].
Infine a partire dal 1980 lo sviluppo della fotoelasticità digitale [1.2.16, 1.2.20] ha
permesso (2000) di ridurre notevolmente i tempi di acquisizione e di elaborazione dei risultati
nel caso dei campi tensionali piani. In futuro l’uso combinato dei metodi della fotoelasticità
digitale, dei metodi di tomografia fotoelastica e della sterolitografia potrà probabilmente
portare ad una ulteriore riduzione dei tempi di analisi anche per i campi tensionali
tridimensionali [1.2.21, 1.2.22].
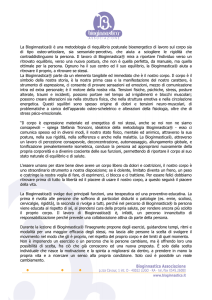
1.2.2 La fotoelasticità bidimensionale
La fotoelasticità bidimensionale studia le lastre piane soggette a stato piano di tensione.
Affinché una lastra piana sia soggetta a stato piano di tensione è necessario che (Fig. 1.1.a):
• lo spessore d della lastra sia costante e piccolo rispetto alle altre dimensioni;
• le forze esterne siano uniformemente distribuite sullo spessore e parallele al piano medio
della lastra che si assume come piano x,y.
In questo caso il campo tensionale nell’intorno di un punto è definito dalle seguenti
componenti cartesiane di tensione (Fig.1.1-b): σ x , σ y , τ xy .
A. Ajovalasit – Fotomeccanica: parte 1
1.4
P
y
d
(a)
z
x
σy
P
(b)
σ2
τx y
σx
σ1
P
θ
x
(c)
Fig.1.1 – Lastra piana soggetta a stato piano di tensione (a), componenti cartesiane (b),
tensioni principali (c)
Ovvero con riferimento ai piani principali (Fig.1.1-c) lo stato di tensione è definito dalle due
tensioni principali σ1 e σ2 e dall’angolo θ che individua l’orientamento delle tensioni
principali rispetto ad un asse di riferimento.
NOTA - Le tensioni σ x , σ y , τ xy sono legate dalle seguenti relazioni:
equazioni di equilibrio in coordinate cartesiane, cioè
∂σ y ∂τ xy
∂σ x ∂τ xy
+Y = 0
+
+ X = 0,
+
∂x
∂y
∂y
∂x
equazione di congruenza, cioè
⎛ ∂X ∂Y ⎞
⎟⎟
∇ 2 (σ x + σ y ) = −(1 + ν )⎜⎜
+
⎝ ∂x ∂y ⎠
(1.1), (1.2)
(1.3)
dove X e Y sono le componenti delle forze di massa per unità di volume e ν è il coefficiente
di Poisson.
In ogni caso le incognite da determinare sono tre: le componenti cartesiane di tensione
σ x , σ y , τ xy , ovvero le tensioni principali ed il loro orientamento σ 1, σ 2 , θ .
La fotoelasticità consente di determinare come risultato diretto dell’esperienza:
• le isocromatiche che sono il luogo dei punti in cui è costante la differenza delle tensioni
principali σ 1 - σ 2 (si veda per esempio la figura 2.3);
• le isocline che sono il luogo dei punti in cui è costante l’orientamento θ delle tensioni
principali (si veda per esempio la figura 2.4).
Si determinano così due (σ 1 - σ 2 , θ ) delle tre incognite σ 1, σ 2 , θ .
•
•
Mediante l’elaborazione dei dati fotoelastici si possono altresì determinare:
le isostatiche, che sono le traiettorie delle tensioni principali, utilizzando le isocline;
le singole tensioni σ 1, σ 2 , mediante procedimenti numerici o sperimentali di separazione
delle tensioni, utilizzando le isocromatiche e le isocline.
Fotoelasticità: 2. L’effetto fotoelastico
1.5
2. L’EFFETTO FOTOELASTICO
Le materie plastiche, che si impiegano in fotoelasticità (resine epossidiche, policarbonato,
etc.), manifestano la birifrangenza accidentale meccanica (o effetto fotoelastico) quando sono
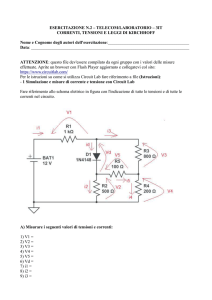
soggette ad un sistema forze. In particolare (Figura 2.1) un campo luminoso, polarizzato
linearmente, incidente normalmente su di un modello in materiale fotoelastico soggetto a stato
piano di tensione subisce le seguenti trasformazioni:
1. il campo incidente, nel generico punto A del modello, si scinde in due campi (E1,
E2) polarizzati linearmente secondo due direzioni ortogonali che coincidono con le
direzioni delle tensioni principali σ1 e σ21;
2. le velocità v1 e v2 di propagazione dei due campi all’interno del modello e quindi i
relativi indici di rifrazione (n=c/v) n1 e n2 dipendono dalle tensioni principali σ1 e
σ2.
Più precisamente gli indici di rifrazione n1 e n2 dipendono dalle tensioni principali σ1 e σ2
secondo la relazione di Maxwell-Neumann che può scriversi
n1 − n2 = C (σ 1 − σ 2 )
(2.1)
dove C è la costante fotoelastica del materiale utilizzato.
Figura 2.1. – Effetto fotoelastico nel caso di stato piano di tensione
NOTA – Come si determina la (2.1)
In generale un materiale fotoelastico soggetto ad uno stato tridimensionale di tensione,
definito dalle tensioni principali σ1, σ2, σ3, diventa otticamente anisotropo. Tale anisotropia
ottica può essere descritta mediante l’ellissoide degli indici (o di Fresnel) [1.1.4] i cui assi
principali coincidono con quelli delle tensioni principali.
Gli indici di rifrazione (n1, n2, n3) relativi alle direzioni delle tensioni principali (σ1, σ2, σ3)
sono legati alle tensioni principali dalle relazioni di Maxwell – Neumann:
n1 = no + Aσ 1 + B(σ 2 + σ 3 )
(2.2)
n2 = no + Aσ 2 + B(σ 3 + σ 1 )
1
In figura, per semplicità si considera un punto con direzioni principali orizzontale e verticale
(2.3)
A. Ajovalasit – Fotomeccanica: parte 1
1.6
n3 = no + Aσ 3 + B(σ 1 + σ 2 )
(2.4)
dove no è l’indice di rifrazione del materiale in assenza di forze, A e B sono le costanti
fotoelastiche assolute del materiale.
Nel caso piano (σ3=0), le relazioni (2.2) e (2.3) divengono:
n1 = no + Aσ 1 + Bσ 2
(2.5)
n2 = no + Aσ 2 + Bσ 1
(2.6)
da cui per differenza si ottiene
n1 − n2 = ( A − B )(σ 1 − σ 2 )
(2.7)
che coincide appunto con la (2.1) dove si è posto C=A-B.
Si noti che la (2.7) vale anche nel caso tridimensionale come si ricava dalla differenza tra le
(2.2) e (2.3):cioè l’eventuale tensione σ3 parallela alla direzione di propagazione del campo
influenza in eguale misura gli indici n1, n2 e quindi non influenza la loro differenza. Questa
circostanza verrà esaminata meglio nel capitolo dedicato alla fotoelasticità tridimensionale.
All’uscita dal modello i due campi luminosi, a causa della diversa velocità di propagazione,
risultano sfasati nel senso che, quando il campo più lento esce dal modello, il campo più
veloce ha già percorso (Figura 2.1) nell’aria uno spazio Δ, detto ritardo spaziale, dato da:
Δ = d (n1 − n2 )
(2.8)
NOTA – Come si determina il ritardo spaziale
Indicando con t1=d/v1 e t2=d/v2 i tempi che impiegano i due campi per attraversare il modello,
lo sfasamento temporale t’ tra i due campi risulta:
⎛1 1⎞
(2.9)
t ' = t1 − t 2 = d ⎜⎜ − ⎟⎟
⎝ v1 v2 ⎠
Il corrispondente sfasamento o ritardo spaziale Δ risulta, indicano con c la velocità di
propagazione della luce all’esterno del modello (assunta uguale a quella nel vuoto):
⎛c
c ⎞
(2.10)
Δ = ct ' = d ⎜⎜ − ⎟⎟ = d (n1 − n 2 )
⎝ v1 v 2 ⎠
essendo n1=c/v1 e n2=c/v2 gli indici di rifrazione dei campi polarizzati secondo le direzioni
delle tensioni principali.
Tale ritardo, tenendo conto della (2.7), risulta:
Δ = Cd (σ 1 − σ 2 )
(2.11)
In fotoelasticità si considera di solito il ritardo spaziale relativo alla lunghezza d’onda λ della
luce utilizzata (δ=Δ/λ) che pertanto risulta:
Cd
(σ 1 − σ 2 )
δ=
(2.12)
λ
La (2.12) è la relazione fondamentale della fotoelasticità. Noti la costante C (mediante
operazione di taratura), lo spessore d e la lunghezza d’onda della luce λ, la misurazione del
ritardo δ consente di determinare la differenza delle tensioni principali (σ 1 − σ 2 ) .
Fotoelasticità: 2. L’effetto fotoelastico
1.7
Si noti che l’osservazione del modello nelle condizioni sopra indicate non consente la
determinazione del ritardo δ dato che i due campi E1 ed E2 non possono interferire essendo
polarizzati secondo due direzioni ortogonali (Figura 2.1). Per rilevare l’effetto fotoelastico e
quindi determinare il ritardo, il modello deve essere osservato in una apparecchiatura
denominata polariscopio (o banco fotoelastico) che verrà descritta nel seguito (cap. 4). Le
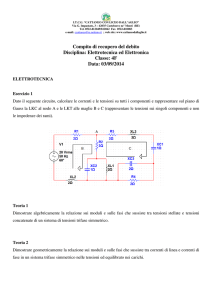
figure 2.3 e 2.4 mostrano esempi di isocromatiche e di isocline determinate al polariscopio.
NOTA – I cammini ottico nel modello fotoelastico
La relazione (2.8) che fornisce il ritardo spaziale può essere determinata direttamente
utilizzando il concetto di cammino ottico (prodotto del cammino geometrico per l’indice di
rifrazione).
Si considerino a tal fine i cammini ottici tra due piani generici 1 e 2 distanti z (Figura 2.2). A
modello scarico il cammino ottico risulta (Figura 2.2-a)
L = zn + d (no − n )
(2.13)
dove n è l’indice di rifrazione del mezzo ambiente. A modello carico i cammini ottici dei
campi diretti secondo le tensioni principali, σ1, σ2 , risultano:
L1 = zn + d ' (n1 − n ) , L2 = zn + d ' (n2 − n )
(2.14) (2.15)
dove d ' ≅ d è lo spessore del modello carico.
Dalle (2.14) e (2.15) si ricava che il ritardo Δ , già determinato in precedenza [si veda l’eq.
(2.11)], è uguale alla differenza dei cammini ottici a modello carico, cioè
Δ = L1 − L2
(2.16)
Infine si noti che i cammini ottici ed il ritardo si possono esprimere in termini di fase angolare
mediante le relazioni:
2π
2π
ϕ1 =
(2.17) (2.18)
L1 ϕ 2 =
L2
λ
ϕ = ϕ1 − ϕ 2 =
2π
λ
λ
Δ = 2πδ
(a)
(2.19)
(b)
Figura 2.2 – I cammini ottici nel modello fotoelastico: (a) modello scarico, (b) modello
carico.
1.8
A. Ajovalasit – Fotomeccanica: parte 1
Figura 2.3 – Isocromatiche a campo scuro in un componente soggetto a flessione
Figura 2.4 – Isoclina di 0° (rispetto all’asse orizzontale) nel componente di cui alla figura 2.3
rilevata però con un carico più basso