MONITORAGGIO IN EMERGENZA
DI UNA FRANA MEDIANTE SAPR
(SISTEMA AEREO A PILOTAGGIO REMOTO)
Landslide Monitoring in Emergency by UAV (Unmanned Aerial Vehicle)
C. Costantini, C. Mozzetti, A. De Vitis:
AiviewGroup - Aibotix Italia
V. Di Giuseppe, S. Nizza, V. Pampalone, A. Scordo:
Aiviewgroup - Elab
Info e contatti:
S. Braccini
[email protected]
Riassunto
N
egli ultimi anni lo sviluppo dei SAPR
(comunemente chiamati DRONI), la miniaturizzazione della sensoristica e, soprattutto, la versatilità e la sicurezza di impiego
hanno permesso di utilizzare questi mezzi nei più
svariati ambiti, dall’agricoltura di precisione al
controllo del territorio. Proprio in quest’ultimo
ambito, e in particolare su accadimenti legati al
dissesto idrogeologico si è sviluppata l’esperienza
della ricostruzione in emergenza del modello tridimensionale ad altissima risoluzione di una frana
con la possibilità, per gli operatori impiegati nel
ripristino o nella progettazione di nuove opere, di
avere una mappa e un modello digitale aggiornato
e dettagliato per soddisfare le loro esigenze, come
ad esempio il calcolo dei volumi di materiale da
asportare.
INTRODUZIONE
In questo periodo giornali e televisioni scrivono
o trasmettono di droni e di quanto questi sistemi
volanti pilotati a distanza siano utili in una grande
varietà di casi.
Da un lato ci sono applicazioni più futuribili che
prossime, come quelle annunciate da Amazon negli
scorsi mesi e che difficilmente rappresenteranno un
vero servizio nel breve periodo. Dall’altro ci sono
invece ampi spazi nelle applicazioni di rilievo, misu-
Abstract
During the last few years, the development of RPAS
(commonly called DRONES), the miniaturization
of sensors and the versatility and security of
operations has allowed to use these means in many
fields, from precision farming to the control of the
territory. Precisely in the latter, and in particular in
hydrogeological instability, the experience of the
emergency reconstruction of high resolution threedimensional model of a landslide is developed, with
the possibility, for the operators employed in the
design of new works, to have a map and a digital
model to date and detailed to meet their needs, such
as the calculation of the volume of material to be
removed.
Termini Chiave
Keywords
SAPR
RPAS
UAV
UAV
Aibot X6
Aibot X6
Monitoraggio
Monitoring
Modelli 3D
3D modeling
Drone
Drone
Dissesto idrogeologico
Hydrogeological instability
Fotogrammetria Photogrammetry di emergenzaemergency
geologia tecnica & ambientale, 2015/1, pp. 77-82
GTA 01 - Art Droni.indd 77
77
13/04/15 12.53
C. Costantini, C. Mozzetti, A. De Vitis, V. Di Giuseppe, S. Nizza, V. Pampalone, A. Scordo
re e monitoraggio. Si pensi ad esempio al controllo
di opere e infrastrutture, alla fotogrammetria aerea
di prossimità, alla modellazione e ricostruzione. In
questi casi l’applicabilità dei droni è assicurata e
creerà anche nuova economia e posti di lavoro. Oggi
sono dunque chiare le applicazioni dei droni: pronto
intervento, monitoraggi e ispezioni in sicurezza,
misure del territorio e modellazioni 3D.
I recenti avvenimenti alluvionali in Liguria
nell’ultimo anno sono stati un ulteriore banco di
prova dell’applicabilità dei droni anche in contesti
di emergenza.
Durante le forti piogge di quest’inverno, all’altezza dello svincolo autostradale di Bolzaneto una
frana con conseguente discesa di masse di materiali
a valle ha bloccato l’accesso all’autostrada. Autostrade per l’Italia è stata la prima società italiana,
e tra le prime al mondo, ad introdurre i droni nel
ciclo ispettivo delle proprie opere. Con l’intuito di
chi vuole essere sempre un passo avanti, aperto alle
nuove tecnologie ed al miglioramento dei processi,
Autostrade per l’Italia ha sperimentato nel 2012 e
introdotto dal 2013 i droni come strumento operativo per l’ispezione di ponti e viadotti. Forte di questa esperienza ha quindi deciso di utilizzare questi
sistemi nelle attività di rilevo normalmente svolte
attraverso noleggio di elicotteri o aerei.
L’intervento è stato pianificato ed eseguito nel
tempo di 24 ore. La disponibilità di procedure operative certificate da ENAC (Aibotix Italia è operatore autorizzato per attività critiche e organizzazione
per la formazione teorica e pratica), la rapida dislocazione del personale operativo (Pilota e Co-Pilota),
dei droni e del personale di sentinella ha permesso
l’effettuazione del volo pianificato sull’area interessata dalla frana in completa sicurezza ed efficienza.
La conseguente post-elaborazione dei dati acquisiti dal drone ha reso disponibile in 48 ore al
personale di Autostrade e agli operatori, le ortofoto
aggiornate dello stato di fatto del luogo di interesse, i modelli digitali delle elevazioni (DEM) e i
modelli digitali del terreno (DTM). Tutte queste
informazioni hanno permesso di calcolare i volumi
di materiale scesi a valle e in un secondo momento
78
GTA 01 - Art Droni.indd 78
sono stati utilizzati come base cartografica per la
progettazione delle opere di risanamento.
“L’esperienza dell’intervento in emergenza sulla
frana di Bolzaneto ha dimostrato quanto sia necessaria un’organizzazione certificata oltre la ovvia necessità di sicurezza e affidabilità del drone stesso”,
sottolinea Alberto DeVitis, Pilot in Command e
Chief Flight Instructor di Aibotix Italia e primo
pilota UAV in Italia abilitato da ENAC a gestire
attività critiche.
“Dobbiamo essere in grado di assicurare completamente la tracciabilità e la qualità di tutte le
operazioni. Questo richiede un livello di preparazione molto elevato per tutte le figure che operano
nell’organizzazione. E questo è l’aspetto più importante. Si parla di nuove professionalità in un settore
ad alta tecnologia, ed ora questa visione comincia
a realizzarsi. Servono figure esperte per gli aspetti
aeronautici, per il trattamento delle informazioni,
capaci di gestire l’operatività in campo e di prendere
decisioni veloci e consapevoli.”
La figura successiva riporta il caso della frana
che ha interessato lo svincolo autostradale di Bolzaneto nel marzo 2015 (Fig. 1).
APR UTILIZZATO E MODALITÀ
DI INTERVENTO
Il rilievo è stato effettuato mediante drone
esacottero Aibot X6 con peso al decollo di 4 kg,
alimentato elettricamente a batterie garantendo
un’autonomia di volo e di operatività di circa 20
minuti. Il sensore utilizzato per il rilievo è una fotocamera digitale reflex Nikon D3200, di peso inferiore ai 500 g, caratterizzata da elevata risoluzione
delle immagini acquisite (24 Megapixel) (Fig. 2).
La zona da investigare è stata naturalmente sottoposta a transennamento con lo scopo di impedire
l’accesso di persone non autorizzate all’area delle
operazioni.
Gli operatori (pilota e co-pilota) a terra hanno
avuto a disposizione uno schermo per ricevere in
tempo reale la visuale da drone (“Live View”): si
tratta di un sistema basato su un collegamento radio
fra lo schermo digitale a terra e una camera secon-
geologia tecnica & ambientale, 2015/1, pp. 77-82
13/04/15 12.53
Monitoraggio in emergenza di una frana mediante SAPR (Sistema Aereo a Pilotaggio Remoto)
Fig. 1 Ortofoto dell’area interessata dalla frana
Fig. 1 Ortophoto of the area effected by the landslide
geologia tecnica & ambientale, 2015/1, pp. 77-82
GTA 01 - Art Droni.indd 79
79
13/04/15 12.53
C. Costantini, C. Mozzetti, A. De Vitis, V. Di Giuseppe, S. Nizza, V. Pampalone, A. Scordo
Fig. 2 Operatore sul sito emergenziale
Fig. 2 Operator on the emergency site
Fig. 3 Esacottero Aibot X6 in volo durante il rilievo della zona franata
Fig. 3 Exacopter Aibot X6 in the flight during the survey of the landslide area
80
GTA 01 - Art Droni.indd 80
geologia tecnica & ambientale, 2015/1, pp. 77-82
13/04/15 12.53
Monitoraggio in emergenza di una frana mediante SAPR (Sistema Aereo a Pilotaggio Remoto)
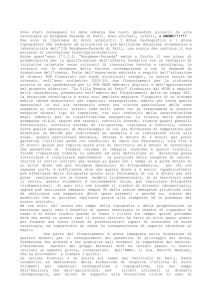
Fig. 4 Digital elevation Model (a) e ortofoto georiferita (b)
Fig. 4 DTM and georeferenced orthophotos
daria di puntamento montata a bordo del drone,
nella stessa direzione dell’obiettivo della camera per
il rilievo. Questa funzionalità risulta molto vantaggiosa prima di tutto per una corretta conduzione
delle operazioni e in seconda battuta per verificare
sul campo la qualità delle immagini fotografiche
per il rilievo.
La durata del rilievo è stata di una giornata e la
quota di volo è stata mantenuta costante a 60 metri
di altezza rispetto al terreno. In alcuni punti si è
scesi ad una quota di 30 metri così da ottenere in
sede di post-elaborazione una risoluzione a terra
inferiore a 0,5 cm/pixel.
Il volo pianificato sulle diverse altezze in relazione alla morfologia del terreno ha prodotto il
passaggio su 60 waypoints, sui quali il drone ha
stazionato 4 secondi per garantire una ridondanza
di scatti e immagini. La posizione della fotocamera
è stata mantenuta in nadirale durante tutto il volo.
Successivamente, con lo scopo di ottenere un mo-
dello 3D del sito, è stato eseguito un secondo volo
manuale con fotocamera in posizione obliqua che ha
prodotto immagini di dettaglio anche ravvicinate.
I voli hanno interessato anche l’area con gli alberi.
L’Aibot X6 grazie al suo frame unico e ai misuratori
di distanza dagli ostacoli ha permesso al pilota di
eseguire voli ravvicinati sotto le chiome degli alberi
con lo scopo di catturare ulteriori dettagli non visibili
con un volo nadirale a 20 o 60 metri. (Fig. 3)
Sempre in vista del lavoro di post-elaborazione,
durante il rilievo sono stati acquisiti dei punti a terra
con stazione GPS differenziale che hanno permesso,
una volta elaborato il modello tridimensionale, di
ancorare e scalare il risultato alla cartografia già
esistente e nel sistema di riferimento richiesto.
PRODOTTO FINALE
Dal modello digitale, costituito da una nuvola
densa con circa 53 milioni di punti, è stato derivato
il modello digitale delle elevazioni (Fig. 4a) che è
geologia tecnica & ambientale, 2015/1, pp. 77-82
GTA 01 - Art Droni.indd 81
81
13/04/15 12.53
C. Costantini, C. Mozzetti, A. De Vitis, V. Di Giuseppe, S. Nizza, V. Pampalone, A. Scordo
Fig. 5 Modello 3D navigabile in formato pdf
Fig. 5 3D measurable PDF model
stato fornito al committente insieme all’ortofoto
georiferita (Fig. 4b), entrambi con una risoluzione
di 3 cm/pixel.
A conclusione, oltre ai due prodotti su menzionati è stato fornito anche un modello 3D navigabile
in formato pdf (Fig. 5) per una visione completa
dell’area investigata.
Questo tipo di file è utile, oltre che per una
rapida visualizzazione dell’area in oggetto, per
la possibilità di effettuare misurazioni di quote,
dislivelli e distanze in generale fra diversi punti
caratteristici del modello e dunque della frana.
CONCLUSIONI
In futuro l’ambito di utilizzo dei droni si potrà
ampliare notevolemente. Si tratta infatti di tecnologie in rapido sviluppo tecnologico, che consentono ogni giorno di aprire possibilità di utilizzo
e di nuove applicazioni, sempre puntando alla
velocità, alla sicurezza ed alla precisione delle
informazioni. È corretto infatti pensare a queste
82
GTA 01 - Art Droni.indd 82
macchine come sistemi di misura volanti e non
come semplici sensori volanti. In questo modo
si comprende meglio come tutte le informazioni
possano entrare a far parte di un flusso organico
ed integrato, e possano contribuire a fornire un
quadro complessivo dell’area indagata sempre più
preciso e continuamente aggiornato. Già oggi è
infatti possibile gestire dati etrogenei quali termografie, analisi multispettrali, chimiche, in grado di dare informazioni preziose del territorio e
di agire sia in prevenzione che tempestivamente
in caso di emergenza. In un prossimo futuro queste informazioni saranno completamente integrate con altre provenienti da reti di sensori, con
le informazioni satellitari e con quelle generate
dalle apparecchiature di terra. I sistemi potranno
essere gestiti da remoto e potranno agire come
“sciami” di droni cooperanti. Interverranno automaticamente in caso di necessità e daranno in
tempo reale il quadro completo delle situazioni.
Il futuro è iniziato.
geologia tecnica & ambientale, 2015/1, pp. 77-82
13/04/15 12.53