Appunti di Antenne
C a p i t o l o 2 – A n t e n n e e l e me n t a r i ( I V )
Dipolo ripiegato ............................................................................................................ 1
Antenne a dipolo corto................................................................................................... 6
Effetti di bilanciamento e adattatori di impedenza......................................................... 12
Balun a bazooka ...................................................................................................... 15
Balun per antenne TV.............................................................................................. 16
Adattamento di impedenza ........................................................................................... 19
Adattatore resistivo .................................................................................................. 20
METODO DEI MOMENTI ..................................................................................................... 23
Descrizione del metodo ................................................................................................ 23
Procedura generale ..................................................................................................... 25
Interpretazione geometrica........................................................................................ 26
Dipolo ripiegato
Riprendiamo velocemente alcuni concetti relativi al dipolo in λ/2 e, in particolare,
alla sua impedenza di ingresso, che in generale è data da
Z ing =(R perdita +R irr )+jX
Abbiamo visto che questa antenna presenta generalmente una resistenza di
perdita di 2 Ω, che si somma ad una resistenza di radiazione di 73 Ω. In prima
approssimazione, quei 2 Ω possono anche essere trascurati. Per quanto riguarda,
invece, la parte reattiva, abbiamo visto che può essere calcolata, in generale per
tutte le antenne filiformi, tramite il modello delle linee di trasmissione e risulta avere
(nell’ipotesi che la sezione di carico sia z=0, per cui la sezione di ingresso è z=-L, e
nell’ipotesi che il carico sia un circuito aperto z L =∞) la seguente espressione generale:
X=−
jZ C
tan (β L )
dove β=2π/λ e dove L è la lunghezza del singolo braccio dell’antenna. Nel caso del
dipolo in λ /2, risulta L=λ 0 /4 (dove λ 0 è la lunghezza d’onda corrispondente alla
frequenza centrale di lavoro), per cui il denominatore di quella frazione tende ad ∞ e
quindi X tende a zero. Quindi, il dipolo in λ/2 presenta, in corrispondenza di λ 0 , una
impedenza di ingresso essenzialmente a parte reale, il che ovviamente è un grosso
vantaggio in termini di prestazioni dell’antenna. Purtroppo, però, per lunghezze
d’onda maggiori e minori di quella centrale, X non è più nulla e quindi si innesca un
fenomeno di riflessione dell’energia, che equivale ad una distorsione del segnale
trasmesso. La banda dell’antenna viene perciò definita come quell’insieme di
frequenze (e quindi di lunghezze d’onda), centrate su un valore f 0 (corrispondente a
Appunti di “Antenne” – Capitolo 2
λ 0 ), tali da dare una distorsione tollerabile sul segnale. Questa banda, per un dipolo
in λ/2, è generalmente abbastanza ristretta.
In definitiva, quindi, abbiamo sostanzialmente individuato due inconvenienti del
dipolo in λ/2: una resistenza di radiazione non molto elevata e una banda di utilizzo
non molto estesa. In aggiunta, sappiamo anche che la direttività (cioè il massimo
guadagno direttivo) di quest’antenna ha valore 1.64, anche questo non molto elevato.
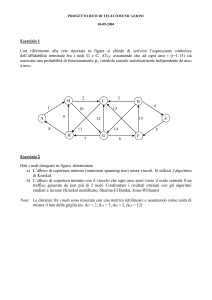
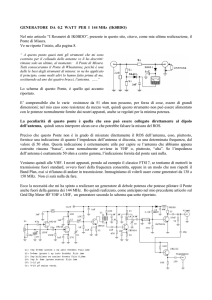
Migliori prestazioni si possono ottenere con una particolare struttura denominata
dipolo ripiegato, raffigurata nella figura seguente:
L
Si tratta sostanzialmente di due conduttori rettilinei, di lunghezza L ciascuno,
collegati insieme alle rispettive estremità e posti a distanza molto piccola. Uno dei
due (quello inferiore nella nostra figura) è aperto al centro e connesso ad una linea di
trasmissione, che quindi alimenta l’intera struttura.
Una struttura di questo tipo risulta avere, come vedremo, una resistenza di
radiazione di 292 Ω , ossia quattro volte superiore a quella del singolo dipolo in λ/2.
Questo è indice di una efficienza di radiazione dell’energia, a parità di potenza di
alimentazione, decisamente migliore. Non solo, ma 292 Ω è un valore molto prossimo
ai 300 Ω di impedenza caratteristica nominale delle linee di trasmissione molto
spesso utilizzate per i ricevitori televisivi.
Alla lunghezza di risonanza (L≅λ 0 /2), la corrente in ciascun conduttore risulta
essere la stessa, considerando che i due conduttori sono identici strutturalmente: il
motivo dell’uguaglianza è nel forte accoppiamento mutuo tra i due conduttori posti
così vicini uno all’altro. La corrente in ciascun conduttore può essere approssimata
con la classica espressione
I(z) = I 0 cos(k 0 z )
Dato che i due conduttori sono distanziati di una frazione molto piccola di λ 0 ,
esiste anche una piccolissima variazione di fase nei due campi da essi irradiati. Di
conseguenza, il campo totale irradiato è praticamente il doppio di quello irradiato dal
singolo conduttore con distribuzione di corrente I 0 cos(k 0 z). Se il campo è pari al
doppio, la potenza irradiata sarà quindi 4 volte quella del singolo conduttore. Allora,
dato che la corrente fornita in ingresso dalla linea di trasmissione è pari a I 0 , la
resistenza di radiazione, vista dai terminali di ingresso, è 4 volte quella dell’antenna
a dipolo convenzionale. Ricordando che la resistenza di irradiazione del dipolo
convenzionale era esattamente 73.13 Ω, deduciamo che ora essa è diventata
R rad = 4 ⋅ 73.13Ω = 292.5 Ω
come accennato prima.
Abbiamo dunque risolto il primo problema del dipolo in λ/2 tradizionale, ossia
aumentare la resistenza di radiazione. Dobbiamo ora vedere quanto può essere larga
la banda di utilizzo del dipolo ripiegato.
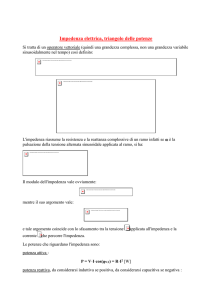
A tal fine, possiamo osservare che il comportamento del dipolo ripiegato può
essere pensato come la sovrapposizione degli effetti ottenuti da due distinte
strutture, una simmetrica e l’altra asimmetrica nella propria alimentazione, del tipo
seguente:
Autore: Sandro Petrizzelli
2
Antenne e metodi elementari (parte IV)
L
d
I0=I1+I2
+ V -
L
I1
L
+ V/2 -
I2
d
- V/2 +
d
I1
I2
+ V/2 -
+ V/2 -
Nella struttura a sinistra, è presente una eccitazione uguale nei due conduttori
(even excitation), in modo che le correnti assumano lo stesso verso e quindi che i
due conduttori si comportino come due antenne a dipolo tradizionali.
Nella struttura a destra, invece, l’eccitazione è uguale ed opposta (odd
excitation), in modo tale che le correnti scorrano in verso opposto nei due
conduttori; è quindi come aver connesso in serie due linee di trasmissione
cortocircuitate. Dato che le correnti nella linea di trasmissione sono opposte e molto
vicine fisicamente, i rispettivi campi irradiati praticamente si compensano a vicenda
(la fase dei due campi è infatti diversa ma di poco, mentre i versi sono opposti).
Sovrapponendo gli effetti delle due strutture, la tensione di alimentazione
risultante è V per il conduttore inferiore e zero per quello superiore. Per quanto
riguarda, invece, le correnti, basta sommare quelle nei due casi.
Consideriamo dapprima la struttura simmetrica (quella a sinistra), che è
perfettamente equivalente alla seguente:
I1
I1
+ V/2 -
Si tratta cioè di un classico dipolo con tensione di alimentazione V/2 e corrente in
ingresso 2I 1 , per cui scriviamo che
Z ing ,simm =
V/2 1 V
=
2I1
4 I1
dove Z ing,simm è l’impedenza di ingresso di una antenna a dipolo realizzata tramite due
conduttori paralleli connessi tramite le rispettive estremità e connessi anche al
centro. Poniamo perciò Z ing,simm =Z dip .
Se invece consideriamo la struttura asimmetrica, essa risulta equivalente a quella
riportata nella figura seguente:
3
Autore: Sandro Petrizzelli
Appunti di “Antenne” – Capitolo 2
I2
- V/4 +
- V/4 +
+ V/4 -
+ V/4 -
I2
Abbiamo semplicemente sdoppiato i due generatori di tensione (e ovviamente
dimezzato i rispettivi valori), in modo da individuare i punti intermedi dei due
conduttori: per simmetria, tali punti sono allo stesso potenziale e quindi possono
essere cortocircuitati. Di conseguenza, possiamo considerare un’unica struttura (non
radiativa, per le considerazioni fatte prima) del tipo seguente:
- V/4 +
I2
I2
+ V/4 In questa struttura, abbiamo praticamente un unico generatore V/2 che genera
una corrente I 2 , per cui scriviamo che
Z ing ,asimm =
V/2 1 V
=
I2
2 I2
L’espressione dell’impedenza di ingresso che compare qui è quella generale
derivata dalla teoria delle linee di trasmissione:
Z ing ,asimm = −
ZC
L
j ⋅ cot an β
2
dove Z C è l’impedenza caratteristica di una linea di trasmissione costituita dai due
conduttori che realizzano il dipolo ripiegato. Scriviamo dunque che
−
ZC
1V
=
L 2 I2
j cot an β
2
Andiamo adesso ad applicare la sovrapposizione degli effetti, in modo da ottenere
l’alimentazione originale. L’impedenza totale vista ai morsetti di ingresso è
Z ing =
V
1
1
1
=
=
=
I1 + I 2 I1 I 2
1
1
1
1
L
L
+
+ −
j cot an β
− j
cot an β
V V 4Z dip 2 ZC
2 4Z dip 2 Z C
2
Autore: Sandro Petrizzelli
4
Antenne e metodi elementari (parte IV)
Se, dunque, ragioniamo in termini di ammettenza di ingresso, scriviamo che essa
vale
Ying =
1
1
L
−j
cot an β
2ZC
4 Z dip
2
Su questa espressione, tenendo conto che sia Z dip sia β dipendono dalla lunghezza
d’onda di lavoro, possiamo fare varie considerazioni:
•
in primo luogo, notiamo che l’ammettenza di ingresso del dipolo è stata ridotta
di un fattore 4, come già detto in precedenza;
•
in secondo luogo, a tale ammettenza di ingresso risulta sommata (cioè posta in
parallelo) una ammettenza di compensazione. Mettiamoci allora nel caso
particolare
in
cui
L=λ 0 /2:
otteniamo
evidentemente
che
2π λ 0 / 2
π
L
= cot an = 0 , ossia che la parte immaginaria
cot an β 0 = cot an
2
2
λ0 2
scompare. Dato che, per L=λ 0 /2, risulta Z dip ≅73Ω, deduciamo che anche il dipolo
ripiegato ha lunghezza di risonanza L=λ 0 /2 (ossia non presenta reattanza di
ingresso) e la resistenza di ingresso vale circa 292 Ω ;
•
al di fuori della risonanza, invece, l’ammettenza di ingresso risulta avere una
parte immaginaria non nulla:
•
quando
β
L π
<
2 2
(cioè L<λ/2),
risulta Y dip =G dip +B dip con B dip >0 (cioè
L
risulta positiva, per cui abbiamo una
2
capacitiva) ed anche cot an β
ammettenza di compensazione induttiva;
•
quando invece β
L π
> (cioè L>λ/2), risulta B dip <0 (cioè induttiva) ed anche
2 2
L
cot an β < 0 , per cui anche l’ammettenza di compensazione è in questo
2
caso capacitiva.
In ogni caso, dunque, si ha compensazione dell’ammettenza di ingresso
del singolo dipolo, il che indica che la struttura può essere sfruttata su una
banda più larga rispetto a quella del singolo dipolo .
In definitiva, quindi, il dipolo ripiegato consente di ottenere maggiori prestazioni,
rispetto ad un dipolo classico realizzato con conduttori dello stesso spessore, sia in
termini di efficienza di radiazione (la resistenza di radiazione vale 292Ω) sia in termini
di banda di funzionamento (che risulta aumentata talvolta di un fattore abbastanza
elevato). Proprio in base a queste considerazioni, quando vedremo le cosiddette
schiere passive di antenne, osserveremo che risulta opportuno utilizzare proprio un
dipolo ripiegato come elemento attivo (cioè alimentato da una sorgente) cui poi
affiancare un certo numero di elementi passivi (cioè non alimentati direttamente da
una sorgente, ma tramite l’accoppiamento con l’elemento attivo).
5
Autore: Sandro Petrizzelli
Appunti di “Antenne” – Capitolo 2
Segnaliamo, comunque, che, nei dipoli ripiegati di reale applicazione, la lunghezza
di risonanza è leggermente inferiore a λ 0 /2, per cui le frequenze di risonanza
dell’antenna e della linea di trasmissione non coincidono esattamente.
Un’altra osservazione interessante è la seguente: una antenna a dipolo ripiegato
non necessariamente è costituita da due conduttori di ugual diametro; anzi, variando
il rapporto tra i diametri, l’impedenza di ingresso può essere aumentata da 2 a 20
volte in più rispetto a quella del singolo dipolo. Non solo, ma è possibile usare tre o
più conduttori in parallelo, di cui uno solo alimentato: se i conduttori sono 3 e sono
identici, l’impedenza di ingresso risulta aumentata di un fattore 9.
Antenne a dipolo
di polo corto
Alle frequenze basse, dove la lunghezza d’onda è elevata, le inevitabili limitazioni
di spazio spesso non permettono di usare una antenna a dipolo lunga esattamente
λ/2. E’ necessario usare L<λ/2, ma questo ha sostanzialmente due svantaggi: da un
lato riduce considerevolmente la resistenza di radiazione e, dall’altro, aumenta molto
la reattanza capacitiva dell’antenna. Quest’ultimo problema impone di prendere
provvedimenti atti a compensare l’aumento della reattanza e spesso si usano uno o
più induttori connessi in serie con l’antenna. Naturalmente, anche questo non è un
rimedio privo di problemi, in quanto gli induttori, non essendo perfetti, comportano
perdite addizionali di potenza e quindi una riduzione dell’efficienza e del guadagno
dell’antenna.
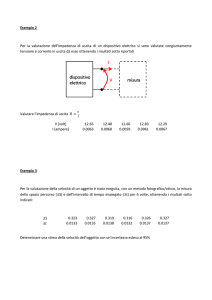
Una semplice configurazione che spesso viene utilizzata è quella riportata nella
figura seguente, in cui i due induttori sono posti all’inizio di ciascun “braccio”
dell’antenna:
L/2
L/2
z
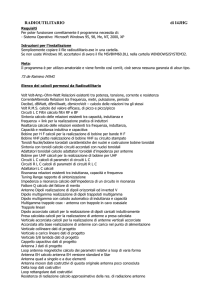
Ci sono tuttavia altre possibilità, come ad esempio quella di porre i due induttori
al centro di ciascun braccio dell’antenna, come nella figura seguente:
L/2
z
L/2
L0/2
L0/2
z=-L/4
z=L/4
Il motivo per cui abbiamo posto le due induttanze pari a L 0 /2 sarà chiaro più
avanti, ma si tratta di una semplice comodità matematica quando useremo ancora
una volta il modello delle linee di trasmissione per studiare questo tipo di struttura.
In questo caso, si riesce a ottenere una distribuzione di corrente nell’antenna più
uniforme e questo comporta un aumento della resistenza di radiazione. Per
comprendere l’entità di questo aumento, osserviamo quanto segue: abbiamo già visto
in precedenza che, se la lunghezza del singolo braccio dell’antenna è abbastanza
minore di λ/4, la distribuzione di corrente è approssimativamente triangolare,
Autore: Sandro Petrizzelli
6
Antenne e metodi elementari (parte IV)
proporzionale cioè ad un termine del tipo
2π
(| L | − | z |) ,
λ
e la potenza irradiata è
proporzionale all’area sottesa dall’andamento della corrente stessa:
z
I( z ) ≅ I 0
2π
(| L | − | z |)
λ
Allora, in presenza dei due induttori al centro dei due bracci dell’antenna, se si
riuscisse ad ottenere una distribuzione uniforme di corrente potrebbe anche essere
ottenuto un aumento della resistenza di radiazione di un fattore 4 rispetto a quella
relativa alla distribuzione triangolare di corrente.
Al fine di studiare come gli induttori possano influire sulla distribuzione di
corrente I(z) nell’antenna descritta nella penultima figura, possiamo come al solito
modellare l’antenna come una linea di trasmissione avente come carico un circuito
aperto (quindi z L =∞):
L/2
z=-L
z=-L/4
z=0
z
I due induttori devono essere scelti in modo tale che l’antenna risulti risonante
alla frequenza centrale di lavoro (tuning dell’antenna). Questo equivale a fare in
modo che la linea di trasmissione sia lunga esattamente λ 0 /4 (dove λ 0 è la lunghezza
d’onda centrale di lavoro), il che significa che l’impedenza di ingresso della linea di
trasmissione deve azzerarsi in corrispondenza di λ 0 . In generale, l’espressione di
questa impedenza può essere ricavata nel modo seguente:
•
in primo luogo, se consideriamo la sezione immediatamente a destra dei due
induttori, possiamo utilizzare l’espressione classica dell’impedenza di ingresso
(a distanza d=L/2 dal carico) per le linee di trasmissione chiuse su z L =∞:
scriviamo perciò che
L
Z DX = − jZ C cot an β 0
4
7
Autore: Sandro Petrizzelli
Appunti di “Antenne” – Capitolo 2
•
in secondo luogo, spostandoci alla sezione immediatamente a sinistra dei due
induttori, dobbiamo sommare, all’impedenza determinata al punto precedente,
una impedenza concentrata jωL 0 dovuta appunto agli induttori: abbiamo perciò
che
L
ZSX = jωL 0 − jZ C cot an β 0
4
•
infine, dobbiamo portarci all’ingresso vero e proprio della linea, ossia dobbiamo
vedere come si trasforma Z SX muovendoci di un ulteriore tratto L/2 verso il
generatore: in questo caso, nell’ipotesi di riportare nuovamente l’origine z=0 del
sistema di riferimento in corrispondenza dell’ingresso della linea, si trova
l’espressione
L
L
− jZ C cot an β 0 + jωL 0 + jZ C tan β 0
4
4
Z in =
L
L
Z C + jωL 0 − jZ C cot an β 0 ⋅ j tan β 0
4
4
In base a questa espressione, è evidente che l’impedenza di ingresso della linea
scompare quando si annulla quel numeratore, ossia quando
L
L
jωL 0 = jZ C cot an β 0 − jZ C tan β 0
4
4
La risoluzione di questa equazione, in corrispondenza di una prefissata ω0 ,
fornisce il desiderato valore di induttanza.
A questo punto, ci interessa vedere come è fatta la distribuzione della corrente e
della tensione lungo la linea. Tenendo conto che il carico di valore infinito impedisce
le riflessioni e che abbiamo fatto in modo che l’impedenza di ingresso della linea sia
zero, necessariamente l’onda diretta di tensione dovrà valere 0 in corrispondenza
dell’ingresso (z=0), mentre invece l’onda di corrente dovrà avere un massimo. Questo
impone che l’andamento di V(z) e I(z), nella parte sinistra della linea (vale a dire fino
al centro z=L/4 delle induttanze), non possa che essere il seguente:
V (z) = V1 sin (β 0 z )
I(z) = I1 cos(β 0 z )
Possiamo facilmente calcolare il legame esistente tra V 1 ed I 1 ricordando che, per
una qualsiasi linea di trasmissione, sussiste la relazione
dV(z )
= − jωL L I(z )
dz
dove L L è l’induttanza concentrata della linea stessa.
Calcolando dunque la derivata di V(z) e uguagliandola a -jωL L I(z), otteniamo
β 0 V1 cos(β 0 z ) = − jωL L I1 cos(β 0 z )
→
Autore: Sandro Petrizzelli
8
V1
ωL L
= −j
I1
β0
Antenne e metodi elementari (parte IV)
Il rapporto ωL L /β 0 in una linea di trasmissione è notoriamente pari all’impedenza
caratteristica della linea stessa, per cui concludiamo che
V1
= − jZ C
I1
Se ora passiamo nella sezione destra della linea (quindi per z≥L/4), la corrente
deve necessariamente essere nulla all’estremo (in z=L/4) mentre invece la tensione
avrà un massimo: avremo di conseguenza che
L
V(z) = V2 cos β 0 − z
2
I(z) = I sin β L − z
2
0 2
dove naturalmente vale sempre la relazione
V2
= − jZ C .
I2
A questo punto, dato che la corrente deve essere necessariamente continua
attraverso gli induttori, possiamo imporre l’uguaglianza dei due andamenti (per
z<L/4 e z>L/4) in corrispondenza appunto di z=L/4:
z=
I
L
L
L
→ 1 = tan β 0
→ I1 cos(β 0 z ) = I 2 sin β 0 − z
I2
4
4
2
Al contrario, la tensione subisce una variazione, in corrispondenza degli induttori,
pari
a
L
jωL 0 ⋅ I1 cos β 0 , il che comporta che la tensione sia discontinua in
2
corrispondenza di z=L/4: perciò, dato che in corrispondenza di z=L/4 risulta
L
2
L
DX → V(z) = V2 cos β 0
4
SX → V(z) = V1 sin β 0
scriviamo che
L
L
L
V1 sin β 0 − V2 cos β 0 = jωL 0 ⋅ I1 cos β 0
2
4
2
Se ora esprimiamo le due tensioni in funzione delle rispettive correnti, questa diventa
L
L
L
− jZ C I1 sin β 0 + jZ C I 2 cos β 0 = jωL 0 ⋅ I1 cos β 0
2
4
2
Non solo, ma se utilizziamo l’espressione di ωL 0 ricavata in precedenza per rendere
l’antenna risonante, si trova facilmente che questa equazione si riduce nella forma
9
Autore: Sandro Petrizzelli
Appunti di “Antenne” – Capitolo 2
I1
L
= tan β 0 e questo è esattamente quanto trovato prima per la continuità delle
I2
4
correnti, a testimonianza della correttezza dei discorsi fatti.
Consideriamo ora le distribuzioni di corrente appena descritte; se supponiamo che
l’antenna sia caratterizzata da L≤λ 0/4, possiamo fare le seguenti approssimazioni:
z≤L/4 → I(z) = I1 cos(β 0 z ) ≅ I1
L
L
− z ≅ I 2 ⋅ β 0 − z
2
2
z≥L/4 → I(z) = I 2 sin β 0
In base a queste espressioni, la corrente è praticamente costante sul valore I1 per
z≤L/4, mentre invece ha andamento triangolare per z≥L/4:
I 1 cos (β 0 z )
V(z)
L
− z
I2 ⋅β 0
2
V(z)
z=0
L/2
z=L/4
z
Allora, in questa approssimazione, l’area al di sotto della curva della corrente vale
L
L
L
Area = 2 I1 ⋅ + I1 ⋅ = 3I1 ⋅
4
8
4
Questa espressione, confrontata con il valore
I1 ⋅
L
2
che si ottiene per la
distribuzione triangolare di corrente, mostra un incremento dell’area di un fattore 1.5 e
quindi un incremento della resistenza di radiazione di un fattore (1.5)2, ossia 2.25.
Questo incremento mostra l’utilità di porre gli induttori al centro dell’antenna anziché
agli estremi di ingresso.
Un altro metodo usato per ottenere una distribuzione di corrente quanto più
uniforme possibile su una antenna a dipolo corto è quello di inserire dei carichi
capacitivi alle due estremità dell’antenna stessa. Ad esempio, si ottiene questo risultato
collegando le suddette estremità con 4 o più conduttori radiali, disposti su un piano
ortogonale all’asse dell’antenna e ciascuno di lunghezza L1 opportuna:
Autore: Sandro Petrizzelli
10
Antenne e metodi elementari (parte IV)
z
L1
Così facendo, la corrente non si annulla agli estremi dell’antenna, dato che può
fluire nei conduttori radiali. Ovviamente, essa si annulla alle estremità dei
conduttori radiali. L’effetto conseguente è sostanzialmente un allungamento
dell’antenna di una quantità 2L 1 e questo rende la distribuzione della corrente
sull’antenna più uniforme, conseguendo perciò i vantaggi di cui si è parlato in
precedenza.
11
Autore: Sandro Petrizzelli
Appunti di “Antenne” – Capitolo 2
Effetti di bilanciamento
bilanciamen to e adattatori di impedenza
Fino ad ora, abbiamo considerato solo antenne ideali, non solo dal punto di vista
dell’assenza di perdite (il che determina l’uguaglianza tra guadagno di potenza e
guadagno direttivo), ma anche dal punto di vista del cosiddetto bilanciamento. E’
possibile dare varie definizioni del concetto di struttura bilanciata. Ad esempio,
consideriamo l’antenna a dipolo elettricamente lungo rappresentata nella figura
seguente:
Per analizzare questa antenna, è conveniente ipotizzare che la corrente I(z), in un
qualsiasi punto z 1 del braccio superiore, abbia lo stesso valore assoluto della
corrente calcolata nel punto -z 1 del braccio inferiore (punto che, quindi, è posto ad
una distanza dai morsetti di alimentazione pari a quella che separa questi ultimi dal
corrispondente punto del braccio superiore). In questo senso, possiamo dire che
l’antenna risulta essere una struttura bilanciata dal punto di vista della simmetria
delle correnti dell’antenna stessa. La conseguenza di ciò è che la corrente entrante in
un morsetto dell’antenna sia uguale ed opposta a quella entrante nell’altro morsetto.
Tuttavia, la presenza di oggetti metallici (ad esempio piani di massa) nelle
vicinanze dell’antenna potrebbe rompere la suddetta proprietà di bilanciamento, il
che andrebbe inevitabilmente a modificare il diagramma di irradiazione rispetto alla
forma ideale ottenuta supponendo che le due correnti risultino bilanciate lungo i due
bracci dell’antenna.
Per capire meglio questo concetto, consideriamo una generica antenna filiforme
(ad esempio un dipolo in λ/4) alimentata da una sorgente di segnale tramite una
linea di trasmissione con impedenza caratteristica Z C . Vogliamo vedere cosa succede
alle correnti che percorrono la linea e giungono all’antenna, in quanto queste
correnti risentono inevitabilmente dell’accoppiamento con eventuali oggetti
metallici posti nelle vicinanze della linea stessa. A tal fine, possiamo considerare
due casi emblematici: nel primo usiamo una comune piattina come linea di
trasmissione, mentre nel secondo usiamo un cavo coassiale.
Cominciamo dalla piattina (o, in generale, da una tradizionale struttura bifilare,
ossia una linea composta dai classici due conduttori paralleli e non schermati):
Autore: Sandro Petrizzelli
12
Antenne e metodi elementari (parte IV)
Come riportato nella figura, le correnti nel conduttore di andata e nel conduttore
di ritorno della linea risentono dell’accoppiamento capacitivo ad esempio con un
piano metallico posto nei pressi della linea e questo provoca quindi un drenaggio di
corrente verso tale piano (si tratta ovviamente di correnti di spostamento, data la
natura capacitiva dell’accoppiamento). Tuttavia, la corrente drenata risulta essere
praticamente la stessa nei due accoppiamenti, il che mantiene la struttura
bilanciata, nel senso che la corrente nei due conduttori rimane comunque uguale e
quindi lo stesso avviene per i due “bracci” dell’antenna.
Adesso invece consideriamo una linea di trasmissione realizzata tramite un cavo
coassiale:
In condizioni ideali, la corrente arriva all’antenna (proveniente dalla sorgente)
attraverso il conduttore centrale (l’anima del cavo coassiale) e torna alla sorgente
percorrendo la superficie interna dello schermo del cavo. Tuttavia, in presenza del
piano di massa, si verifica ancora una volta un accoppiamento capacitivo tra tale
piano e i due conduttori del cavo, con la differenza, rispetto alla struttura bifilare di
prima, che il conduttore esterno risente di un accoppiamento molto maggiore rispetto
13
Autore: Sandro Petrizzelli
Appunti di “Antenne” – Capitolo 2
a quello interno. Questo determina appunto lo sbilanciamento della struttura, in
quanto all’antenna giungono correnti diverse.
Possiamo dunque esprimerci nel modo seguente:
•
una antenna a dipolo alimentata da una linea di trasmissione bifilare è
bilanciata rispetto a terra, presupponendo ovviamente che i due conduttori
dell’antenna abbiano la stessa orientazione e posizione rispetto alla terra stessa;
tali due conduttori sono a potenziale +V e –V da terra;
•
se invece l’antenna è alimentata da una linea coassiale, che è un sistema
sbilanciato in base a quanto detto prima, il conduttore esterno della linea ed
uno dei due conduttori dell’antenna sono, rispetto a terra, ad un potenziale
diverso da quello del conduttore interno della linea e dell’altro conduttore
dell’antenna. Questo fatto determina l’insorgere di correnti anche sulla
superficie esterna del conduttore esterno della linea, cui conseguono quindi
correnti diverse nei due conduttori dell’antenna. Il campo irradiato dalle
correnti sul conduttore esterno della linea interferiscono con quello irradiato
dall’antenna e quindi viene modificato il paterno di radiazione. In aggiunta a
questo, risulta anche modificata l’impedenza di ingresso dell’antenna, sempre a
causa delle correnti sbilanciate.
In base a queste considerazioni, deduciamo che un cavo coassiale va usato per
alimentare solo antenne sbilanciate (che cioè necessitano di correnti diverse nelle
loro varie parti), mentre invece, volendolo usare per alimentare una antenna
bilanciata come un dipolo in λ/2 o un dipolo ripiegato, è necessario usare un
adattatore di impedenza, chiamato balun (acronimo di BAlanced e UNbalanced)
proprio perché viene interposto tra un cavo coassiale sbilanciato ed una antenna
bilanciata. Questo adattatore viene inserito all’ingresso dell’antenna secondo lo
schema della figura seguente:
Se il cavo di alimentazione è coassiale, l’obbiettivo del balun è quello di aumentare
l’impedenza tra la superficie esterna dello schermo e la massa: in tal modo, la
corrente di ritorno tende a fluire attraverso il percorso a minore impedenza, ossia
quello rappresentato dalla superficie interna dello schermo.
I balun sono realizzati in modi diversi, in dipendenza soprattutto della banda di
frequenza che si prevede di utilizzare.
Autore: Sandro Petrizzelli
14
Antenne e metodi elementari (parte IV)
B
Baallu
un
n aa bbaazzooook
kaa
La quantità di corrente che fluisce sulla superficie esterna del conduttore esterno
del cavo coassiale dipende sia dall’impedenza Z G tra la stessa superficie esterna e il
piano di massa sia dall’eccitazione (non volontaria) della parte esterna dello
schermo.
Una tipologia comune è quella del cosiddetto adattatore di impedenza a bazooka,
rappresentato nella figura seguente e usato tipicamente alle alte frequenze:
Abbiamo qui schematizzato sia la situazione reale (a sinistra) sia il corrispondente
circuito (a destra). L’adattatore consiste evidentemente in uno schermo cilindrico, di
lunghezza pari ad un quarto di lunghezza d’onda (per cui si parla di blocco in
quarto d’onda), inserito attorno allo schermo del cavo coassiale; l’estremità inferiore
è posta in cortocircuito con il conduttore esterno del cavo, mentre l’altra estremità è
lasciata libera. Con questo schema, si realizza perciò una particolare linea di
trasmissione, i cui conduttori sono lo schermo aggiunto e lo schermo del cavo.
Questa linea ha la particolarità di essere lunga λ/4 e di avere un estremo in
cortocircuito: come è noto, questa configurazione fa sì che la linea, all’altro estremo,
si comporti come un circuito aperto, ossia con impedenza infinita. Di conseguenza,
l’impedenza tra i punti A e B mostrati in figura è teoricamente infinita (in realtà, è
solo molto grande) e quindi risulta anche infinita l’impedenza tra schermo esterno e
piano di massa. Questo fa’ sì che la corrente torni alla sorgente tramite il percorso
da noi desiderato.
Esistono altri modi per ottenere alimentazioni bilanciate, tutti con lo stesso scopo,
ossia annullare la corrente che fluisce sulla superficie esterna dello schermo. Ad
esempio, è possibile aggiungere delle perline di ferrite attorno al cavo di
alimentazione, come mostrato nella figura seguente:
15
Autore: Sandro Petrizzelli
Appunti di “Antenne” – Capitolo 2
Queste perline si comportano come induttori di modo comune.
Un altro metodo, per ottenere lo stesso risultato, è quello invece di usare toroidi
di ferrite, come illustrato nella figura seguente, dove viene anche visualizzato il
circuito equivalente della struttura:
In generale, sottolineiamo che gli adattatori di impedenza in ferrite permettono un
bilanciamento a larga banda : tipicamente, il rapporto tra la massima e la minima
frequenza di funzionamento è circa 3. La situazione è invece diversa per l’adattatore
a bazooka: in quel caso, infatti, essendo fissa la lunghezza fisica L della linea di
trasmissione, esiste solo un valore di frequenza al quale risulta L=λ/4, per cui
l’adattamento si ha solo per questa frequenza.
B
TV
V
ntteen
nn
nee T
un
np
peerr aan
Baallu
Un tipo molto comune di balun, usato spesso nei sistemi di antenne TV (nei
quali ricordiamo che l’impedenza del cavo coassiale e l’impedenza di ingresso del
ricevitore TV valgono entrambe 75 Ω) è mostrato nella figura seguente:
Autore: Sandro Petrizzelli
16
Antenne e metodi elementari (parte IV)
ZL=2ZC
•
ƒ
„
‚
Esso consiste di due linee di trasmissione (la prima corrispondente ai morsetti 1 e
3, la seconda corrispondente ai morsetti 2 e 4), con impedenza caratteristica Z C , con
un carico Z L (sarebbe la nostra antenna) pari esattamente a 2Z C , connesse in serie
(tramite il collegamento dei morsetti 3 e 2) e con i terminali di ingresso connessi in
parallelo.
L’impedenza di ingresso è pari a Z L /4, per cui una linea standard di tipo coassiale
con impedenza caratteristica di 75 Ω (tipica delle applicazioni TV) può essere usata
all’ingresso quando l’antenna è realizzata tramite un dipolo ripiegato con resistenza
di ingresso di 292 Ω. Questo tipo di balun consente dunque ad un cavo coassiale di
essere usato per collegare l’antenna al ricevitore e provvedere ad un ottimale
adattamento di impedenza.
Il comportamento di questo balun può essere compreso ipotizzando di alimentare
le due linee di trasmissione in due modi diversi (uno bilanciato e l’altro sbilanciato) e
poi sovrapponendo gli effetti. Nella figura seguente è riportato il caso di una
alimentazione bilanciata rispetto a terra:
A
ZL=2ZC
I1
I1
•
B
+V
-V
I 1+I 2
‚
-V ƒ
I 1 +I2
+V „
Si nota infatti che i terminali sono alternativamente posti a +V e –V. Data questa
simmetria dell’alimentazione, il punto intermedio del carico, indicato con A, e il
corrispondente punto B sono a potenziale zero e quindi possono essere
cortocircuitati. Facendo questo, otteniamo due linee (morsetti 1-2 e morsetti 3-4) con
una impedenza di carico di Z L /2 per ciascuna, che risulta perciò uguale
all’impedenza caratteristica Z C delle linee stesse:
17
Autore: Sandro Petrizzelli
Appunti di “Antenne” – Capitolo 2
I1
•
+V
+V
ƒ
ZL/2
-V
ZL/2
-V
‚
„
In entrambi i casi, indicata con I 1 la corrente in ingresso, otteniamo che
I1 ⋅
Z
ZL
V Z
= 2V
→ Zing = = L = C
I1
4
2
2
Nella prossima figura è invece riportato il caso in cui l’alimentazione è sbilanciata
rispetto a terra, in quanto tutti i conduttori sono alimentati con tensione +V rispetto
a terra:
C
C
ZL=2ZC
I2
I2
•
+V
+V
I2
+V ƒ
I2
+V „
‚
Allora, i 4 conduttori sono equivalenti ad un unico conduttore e la corrente in
ingresso è molto piccola, dato che l’impedenza di carico è data adesso essenzialmente
dalla capacità tra l’antenna e la terra. L’induttanza dei quattro conduttori in
parallelo rappresenta anche una impedenza elevata per la corrente.
A questo punto, sommiamo le due diverse situazioni, applicando la
sovrapposizione degli effetti:
ZL=2ZC
•
0 ƒ
+2V
0
‚
+2V
„
Evidentemente, otteniamo i terminali 1 e 4 alla tensione +2V, mentre i terminali 2
e 3 risultano a tensione nulla. Possiamo allora cortocircuitarli a coppie (1-4 e 2-3),
collegando la prima coppia all’anima del cavo coassiale e la seconda coppia alla
Autore: Sandro Petrizzelli
18
Antenne e metodi elementari (parte IV)
calza. In questo modo, indicate con I 1 e I 2 le correnti di ingresso, rispettivamente, per
l’alimentazione bilanciata e sbilanciata, deduciamo che l’impedenza di ingresso della
connessione vale
Z ing =
Z
2V
V
V Z
=
≅ = L = C
2(I1 + I 2 ) I1 + I 2 I1
4
2
dove abbiamo trascurato I 2 essendo questa sicuramente molto più piccola di I 1 .
Quindi, come anticipato prima, se la nostra antenna è un dipolo ripiegato (quindi
con impedenza di ingresso Z L =292 Ω) ed il cavo è di 75 Ω, siamo riusciti ad adattare
perfettamente la struttura, pur usando una linea sbilanciata ed una antenna
bilanciata.
Adattamento di impedenza
Quando è necessario compiere misure per la caratterizzazione delle emissioni
radiate di un dispositivo, al fine di verificare se esso soddisfi o meno i limiti
normativi, dobbiamo poter compiere tali misure al variare della frequenza, in modo
da poter interpretare rapidamente i dati ottenuti. Ad esempio, le norme FCC vigenti
negli Stati Uniti suggeriscono di usare un dipolo in mezza lunghezza d’onda e
impongono di compiere misure per frequenze comprese tra 30 MHz e 40 GHz: al
variare della frequenza, la lunghezza elettrica dell’antenna a dipolo necessariamente
cambia (mentre invece rimane invariata la lunghezza fisica L); di conseguenza, per
ottenere sempre L=λ/2 ad ogni frequenza, siamo costretti a modificare di volta in
volta la lunghezza fisica. Questo non è certo un procedimento di utilità pratica. Un
modo sicuramente più vantaggioso di procedere consiste nell’usare le cosiddette
antenne per misure a larga banda: tipicamente, vengono usate antenne biconiche e
antenne log-periodiche.
Queste antenne a larga banda vengono preventivamente tarate e i dati rilevati
durante la taratura vengono riportati generalmente su un grafico in cui si traccia
l’andamento del fattore d’antenna con la frequenza. Come già detto in precedenza, i
dati relativi al fattore d’antenna sono da intendersi rilevati sotto due ipotesi: la
prima è che l’antenna sia bilanciata e la seconda è che l’impedenza di carico che si
vede ai morsetti dell’antenna sia di 50 Ω. Tuttavia, quando noi usiamo l’antenna per
compiere le misure, generalmente non possiamo connetterla direttamente allo
strumento ricevitore (ad esempio l’analizzatore di spettro, con impedenza di ingresso
da 50 Ω), ma dobbiamo farlo tramite un cavo, di solito coassiale:
19
Autore: Sandro Petrizzelli
Appunti di “Antenne” – Capitolo 2
Se anche l’impedenza caratteristica del cavo coassiale è di 50 Ω (come solitamente
avviene), sappiamo che anche l’impedenza di ingresso del cavo stesso, una volta che
il ricevitore è stato inserito, risulta essere di 50 Ω per qualsiasi frequenza, proprio
per l’adattamento tra cavo e ricevitore. In questa condizione operativa, quindi,
l’antenna vede ai propri morsetti una impedenza di 50 Ω per qualsiasi frequenza,
come appunto ipotizzato in sede di taratura: in questo caso, possiamo
tranquillamente procedere alle nostre misure e utilizzare poi la conoscenza delle
perdite nel cavo e del fattore di antenna per ottenere i valori di campo incidente
sull’antenna a partire dai valori di tensione misurati dall’analizzatore di spettro:
(E inc )dBµV / m = AFdB + (Vanalizz )dBµV + (perdite)dBµV
Tuttavia, se, per qualche ragione, l’impedenza di carico del ricevitore non fosse di
50 Ω, sorgerebbero dei problemi: infatti, l’impedenza vista ai morsetti dell’antenna,
guardando verso il cavo, non solo non sarebbe di 50 Ω, ma varierebbe anche con la
frequenza. L’unica possibilità per avere una impedenza di ingresso del
cavo costante e pari all’impedenza caratteristica Z C del cavo stesso è
che il carico su cui il cavo è chiuso sia Z L =Z C.
Allora, per ottenere questo adattamento tutte le volte che le terminazioni
assumono valori diversi dall’impedenza caratteristica del cavo, si usano i cosiddetti
adattatori di impedenza e, in particolare, gli adattatori resistivi.
A
daattttaattoorree rreessiissttiivvoo
Ad
Un adattatore resistivo è semplicemente una rete resistiva la cui impedenza di
ingresso rimane pressoché costante, su un valore predefinito, al variare
dell’impedenza di carico e delle frequenza.
Un tipico esempio di adattatore resistivo è riportato nella figura seguente:
Questo circuito è detto adattatore a pi greco per la sua struttura simile alla lettera
greca π.
In effetti, ci sono altri tipi di adattatori, come ad esempio quelli con configurazione
a T. In ogni caso, essendo costituiti solo da resistori, questi circuiti permettono
l’adattamento su un ampio intervallo di frequenza (per cui sono dispositivi a larga
banda), ma, d’altro canto, introducono una inevitabile attenuazione sul segnale,
detta attenuazione di inserzione (indicata con IL, che sta per insertion loss, e
specificata spesso in dB) Quest’ultima è definita come il rapporto tra la potenza
fornita al carico una volta inserito l’adattatore e quella fornita al carico in assenza
dell’adattatore:
Autore: Sandro Petrizzelli
20
Antenne e metodi elementari (parte IV)
IL dB = 10 log 10
(PL )senza
adattatore
(PL )con
adattatore
Ovviamente, ricordando che la potenza trasferita al carico è pari al rapporto tra il
quadrato della tensione sul carico ed il valore del carico stesso, si può anche scrivere
che
IL dB = 20 log 10
(VL )senza
adattatore
(VL )con
adattatore
Una spiegazione essenzialmente qualitativa di come possa funzionare un
adattatore di impedenza, in presenza di ampie variazioni dell’impedenza di carico, è
la seguente, con riferimento all’adattatore a π dell’ultima figura: possiamo facilmente
calcolare la resistenza vista dai morsetti di ingresso dell’adattatore, in quanto risulta
R in = R 1 //[R 2 + (R 3 // R L )]
Se facciamo in modo che la resistenza R 3 sia molto più piccola di tutti i valori
possibili dell’impedenza di carico R L , possiamo sicuramente approssimare
(R 3 // R L ) ≅ R 3 . Inoltre, se scegliamo R 2 in modo che sia molto più grande di R 3 ,
possiamo anche porre R 2 +R 3 ≅R 2 . Sotto queste due condizioni, risulta
R in = R 1 //[R 2 + (R 3 // R L )] ≅ R 1 //[R 2 + R 3 ] ≅ R 1 // R 2
Ovviamente, quanto più piccola è R 3 tanto maggiore è l’intervallo di variazione di
R L che possiamo tollerare; inoltre, al crescere di R 2 il valore di R 3 diventa sempre
meno importante. A fronte di questo, un valore basso di R 3 ed un valore alto di R 2
provocano un aumento della perdita di inserzione. Di conseguenza, quanto
maggiore è la perdita di inserzione che possiamo tollerare tanto
migliore sarà la capacità di adattamento del dispositivo, ossia tanto più
ampio sarà l’intervallo delle impedenze di carico per cui riusciremo ad ottenere
R in ≅Z C .
In base a queste considerazioni, i parametri caratteristici di un adattatore di
impedenza sono il valore di impedenza che si vede ai morsetti di ingresso
nell’intervallo di frequenza e di R L specificati e il valore della perdita di inserzione. Ad
esempio, nella figura seguente è riportato un adattatore a π di 50 Ω e 6 dB:
21
Autore: Sandro Petrizzelli
Appunti di “Antenne” – Capitolo 2
Tanto per avere una idea della bontà di un simile dispositivo, consideriamo il
valore della resistenza di ingresso R in in due condizioni estreme: la prima è quella in
cui l’uscita è un circuito aperto (R L =∞), nel qual caso di ottiene R in =85.55Ω; la
seconda è quella in cui l’uscita è un cortocircuito (R L =0), nel qual caso di ottiene
R in =29.92Ω.
Se questo adattatore viene inserito tra un cavo coassiale con Z C =50Ω ed un carico
generico, allora il ROS sul cavo risulta essere minore di 1.67 per tutti i carichi
compresi tra il circuito aperto ed il cortocircuito, dove ricordiamo che
ROS =
1 + ρL
1 − ρL
dove ρ L è il coefficiente di riflessione.
Generalmente, un ROS accettabile è minore di 1.2: se allora consideriamo carichi
di valore più realistico rispetto a R L =∞ e R L =0, un valore accettabile del ROS si riesce
senz’altro ad ottenere.
Se aumentassimo la perdita di inserzione, ad esempio usando un adattatore a π da
50 Ω e 20 dB (per ottenere il quale bisogna prendere R 1 =R 3 =61.11Ω e R 2 =247.5Ω),
otterremmo un ulteriore miglioramento, ossia un campo di variazione inferiore per il
ROS: infatti, il ROS risulta praticamente pari a 1.2 sia con il carico in cortocircuito
(nel qual caso risulta R in =49.01Ω) sia con il carico aperto (nel qual caso risulta
R in =51.01Ω).
Autore: Sandro Petrizzelli
22
Antenne e metodi elementari (parte IV)
M
Meetto
od
do
od
deeii m
mo
om
meen
nttii
Descrizione del metodo
Quando ci siamo posti il problema di determinare la distribuzione di corrente in
una antenna filiforme, abbiamo condotto un ragionamento ci ha portato alla
seguente equazione, detta equazione di Hallen:
jωµ 0 ε 0 Vg
µ0
e − jk 0 R
ds' = C1 cos(k 0 z ) −
sin( k 0 | z |)
I
(
s
'
)
∫
R
2k 0
4π l
In questa equazione, di tipo integrale, l’incognita è proprio I(s’). Ci sono vari
metodi per risolverla, uno dei quali è stato già visto in precedenza e consiste
nell’applicare il classico metodo ad per approssimazione successive. Un'altra
possibile metodologia è quella basata sul metodo dei momenti, che vogliamo
descrivere in questo paragrafo.
Appare subito evidente che la complessità di quella equazione deriva dalla
presenza di quell’integrale. Si tratta di un integrale un po’ “particolare”, nel senso
che la funzione integranda è data dal prodotto di due funzioni, una incognita e
dipendente solo dalla variabile s’ di integrazione e l’altra (detta nucleo
dell’integrazione), nota, dipendente sia da s’ sia dalla variabile che compare
all’esterno dell’integrale (in quel caso, infatti, R può espresso in funzione di s’ e di z:
R=
(z − s')2 + a 2 ).
Possiamo perciò esprimere quell’equazione nella seguente forma
generale:
1
∫ G (u, u ' )I(u ' )du ' = f (u )
0
Una equazione in questa forma viene detta equazione di Fredholm di prima
specie, in cui il nucleo dell’integrazione è G(u,u’), noto, mentre la funzione da
determinare è I(u’). Ovviamente, anche f(u) si ritiene nota. Vediamo allora come è
possibile applicare il metodo dei momenti per calcolare I(u’) che soddisfa quella
equazione.
Il primo passo fondamentale del metodo dei momenti consiste nell’esprimere I(u’)
come una espansione in serie, ossia come una combinazione lineare, secondo
opportuni coefficienti da determinarsi, di un certo numero (al limite infinito) di
funzioni base note: se indichiamo con Φ n (u ' ) la funzione base di n-simo ordine,
ipotizzeremo perciò che risulti
N
I( u ' ) = ∑ I n Φ n ( u ' )
n =1
I coefficienti I n dello sviluppo sono costanti (in generale complesse) da
determinarsi. Per esempio, le funzioni Φ n (u ' ) potrebbero essere i Seni e Coseni dello
sviluppo in serie di Fourier, nel qual caso i coefficienti I n sarebbero da calcolarsi
tramite formule ben note. In alternativa, le Φ n (u ' ) potrebbero anche essere funzioni
triangolari, nel qual caso l’approssimazione fornita dall’espansione in serie
corrisponderebbe semplicemente ad una interpolazione lineare di I(u’) tra punti di
campionamento rappresentati proprio dai coefficienti I n . In ogni caso, vale il principio
generale per cui l’approssimazione fornita dall’espansione in serie è tanto migliore
23
Autore: Sandro Petrizzelli
Appunti di “Antenne” – Capitolo 2
quanto maggiore è il numero N di funzioni base utilizzate. Allo stesso tempo, però, il
numero N determina anche la complessità degli algoritmi per il calcolo dei
coefficienti I n , per cui si tratta in ogni caso di raggiungere un soddisfacente
compromesso tra approssimazione ottenibile e costo computazionale necessario per
ottenerla.
Il secondo passo del metodo consiste nel sostituire l’espansione di I(u’)
nell’equazione di partenza:
1
N
0
n =1
∫ G(u, u' )∑ I n Φ n (u' )du ' = f (u)
Sfruttando la linearità degli integrali, possiamo portare la sommatoria al di fuori
dell’integrale, per cui scriviamo che
N 1
∑ ∫ G ( u , u ' )I
n
Φ n ( u ' ) du ' = f ( u )
n =1 0
A questo punto, possiamo porre
1
G n (u ) = ∫ G (u , u ' )I n Φ n (u ' )du '
0
in modo tale che la nostra equazione diventi semplicemente
N
∑I G
n =1
n
n
(u ) = f (u )
In base a questa espressione, la funzione f(u) (nota) risulta espressa come
sommatoria di N termini, secondo ancora i coefficienti I n . Il generico di questi termini
è I n G n (u) e, in base alla definizione utilizzata, la generica G n (u) può essere vista come
il momento di G(u,u’) rispetto alla funzione Φ n (u’), da cui quindi il nome di
metodo dei momenti.
In definitiva, quindi, l’equazione integrale di partenza è stata approssimata da una
N
nuova equazione
∑I G
n =1
n
n
(u ) = f (u ) e, con N numero finito, il primo membro di questa
equazione può essere uguale ad f(u) solo in modo approssimato. L’obbiettivo è adesso
quello di determinare i coefficienti In in modo che la nuova equazione risulti soddisfatta
nel miglior modo possibile.
Avendo N incognite, abbiamo bisogno di un sistema (lineare) di N equazioni in tutte e
sole queste incognite. Un possibile modo per ottenere questo sistema è quello di
considerare N differenti valori di u e di imporre l’uguaglianza dei due membri in
corrispondenza di tali valori: ad esempio, spesso si usano valori di u equispaziati di una
quantità h =
1
m
, il che significa considerare i punti u = m ⋅ h =
. Calcolando i due
N −1
N −1
membri dell’equazione in tali punti, si ottiene
N
∑I G
n =1
Autore: Sandro Petrizzelli
n
n
m m
= f
N −1 N −1
m = 0,1,2,......, N - 1
24
Antenne e metodi elementari (parte IV)
Questa equazione equivale evidentemente ad N equazioni scalari nelle N incognite In,
per cui abbiamo ottenuto il nostro sistema lineare da risolvere: scritto in forma
matriciale, questo sistema è
[G mn ]⋅ [I n ] = [f m ]
da cui, per inversione della matrice dei coefficienti, si ottiene
[I n ] = [G mn ]−1 ⋅ [f m ]
Esistono appositi programmi per PC in grado di risolvere sistemi lineari come
questo, per cui la soluzione desiderata può essere ricavata tutto sommato facilmente.
Procedura generale
Esiste d’altra parte un metodo più generale di applicazione del metodo dei
momenti. Esso prevede in primo luogo di scegliere un insieme di N funzioni peso,
indicate ad esempio con ψ m (u) con m=1,2,…...,N. Ciascuna di queste funzioni va
moltiplicata per l’equazione da risolvere, dopodiché si effettua l’integrazione tra 0 ed
1.
Per spiegarci meglio, considerando l’equazione
N
∑I G
n =1
n
n
(u ) = f (u )
dobbiamo per prima cosa moltiplicarla per ciascuna
considerando la generica di queste, avremo perciò
N
∑I G
n =1
n
n
( u )ψ m ( u ) = f ( u )ψ m ( u )
delle
funzioni
peso:
m=1,2,………,N
Successivamente, dobbiamo integrare ambo i membri tra 0 ed 1:
1 N
∫ ∑I G
0 n =1
n
1
n
(u )ψ m (u )du = ∫ f (u )ψ m (u )du
m=1,2,………,N
0
Portando ancora una volta la sommatoria fuori dall’integrale e sostituendo inoltre
l’espressione di G n (u), otteniamo
N
1 1
1
n =1
0 0
0
∑ I n ∫ ∫ G(u, u' )Φ n (u ' )ψ m (u)du ' du = ∫ f (u)ψ m (u)du
m=1,2,………,N
Questa metodologia è detta metodo dei residui pesati: questo nome deriva dal
fatto che l’errore residuo
N
∑ I n G n ( u ) − f ( u )
n =1
risulta pesato dalla generica ψ m (u), integrato ed uguagliato a zero.
25
Autore: Sandro Petrizzelli
Appunti di “Antenne” – Capitolo 2
Nel caso particolare in cui le funzioni ψ m (u) coincidono con le funzioni Φ m (u) usate
per lo sviluppo in serie di I(u), allora di parla di metodo di Galerkin.
IIn
ntteerrp
prreettaazziioon
nee ggeeoom
meettrriiccaa
La procedura appena descritta può essere meglio compresa sulla base della
seguente interpretazione geometrica.
Innanzitutto, pensiamo alla funzione f(u) come un vettore in uno spazio vettoriale
ad infinite dimensioni e alle funzioni ψ m (u) come vettori unitari nello stesso spazio
vettoriale. In tal modo, le componenti del vettore f(u) non sono altro che le proiezioni
del vettore lungo le direzioni individuate dai vettori ψ m (u): la generica componente di
f(u) risulta essere infatti
1
f m = ∫ f (u )ψ m (u )du
m=1,2,………,N
0
Inoltre, la generica ψ m (u) può essere normalizzata tramite la condizione
1
∫ψ
2
m
(u )du = 1
m=1,2,………,N
0
In tal modo, le ψ m (u) corrispondono ai vettori base unitari. Non solo, ma se le
ψ m (u) sono per ipotesi ortogonali tra loro, il che significa che
1
∫ψ
n
(u )ψ m (u )du = 0
m≠n
0
allora essi corrispondono ad un insieme di vettori unitari ortogonali.
Se vogliamo rappresentare f(u) esattamente, dobbiamo trovare tutte le sue
componenti e questo richiede, perciò, in generale, un infinito numero di funzioni
ψ m (u). Se invece noi consideriamo un numero finito di funzioni ψ m (u), il che equivale
a considerare
N
f (u ) ≅ ∑ f m ψ m (u )
m =1
stiamo in pratica trovando la proiezione del vettore f(u) in un sottospazio vettoriale
ad N dimensioni ottenuto appunto tramite le N funzioni ψ m (u).
Quindi, il metodo dei momenti può essere visto come la ricerca delle proiezioni del
vettore f(u) e dei vettori I n G n (u) su un sottospazio vettoriale ad N dimensioni (con N
finito), che poi corrisponde a trovare i coefficienti I n affinché le rispettive proiezioni in
tale sottospazio siano uguali. Il fatto di usare un N finito implica che si stiano in
pratica trascurando le proiezioni nelle rimanenti dimensioni dello spazio vettoriale
complessivo di partenza.
Quando le funzioni peso ψ m (u) sono scelte arbitrariamente, la soluzione non ha
alcuna particolare proprietà. Se poi è fatta una cattiva scelta delle funzioni ψ m (u),
N
allora può capitare che sia f(u) sia
∑I G
n =1
n
n
(u ) abbiano diverse componenti rilevanti
ortogonali al sottospazio creato con le ψ m (u), il che significa che l’approssimazione
ottenuta è davvero scadente.
Autore: Sandro Petrizzelli
26
Antenne e metodi elementari (parte IV)
Concludiamo ricordando che la maggior parte degli integrali che compaiono nelle
equazioni cui è applicabile il metodo dei momenti non possono essere risolti
analiticamente e bisogna perciò ricorrere a metodi numerici, uno dei quali è
l’algoritmo di integrazione numerica noto come regola di Simpson.
Autore: Sandro Petrizzelli
e-mail: [email protected]
sito personale: http://users.iol.it/sandry
succursale: http://digilander.iol.it/sandry1
27
Autore: Sandro Petrizzelli