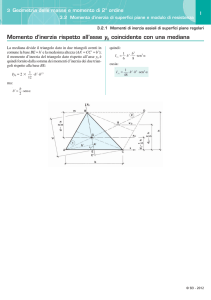
")
Dinamica del Manipolatore
(seconda parte)
Ph.D Ing. Michele Folgheraiter
Corso di ROBOTICA2
Prof.ssa Giuseppina Gini
Anno. Acc. 2006/2007
Equilibrio Statico Manipolatore
Il manipolatore può essere rappresentato tramite una catena cinematica aperta,
su di esso agiranno delle forze/momenti provenienti dai motori e delle
forze/momenti esterni (solitamente applicati all’end-effector).
•Vogliamo determinare i momenti da applicare ai giunti per mantenere un
equilibrio statico.
Hp: trascuriamo la forza peso
Dove: fi è la forza esercitata dal link i-1 sul link i
ni è il momento che il link i-1 esercita sul link i
1
Se vogliamo che il link-i giaccia in equilibrio:
Possiamo trovare la forma iterativa e portare tutte le
forze e momenti rispetto il sdr. dove agiscono:
OSS: quasi tutte le componenti delle forze e dei momenti che agiscono sul link
si scaricano sulla struttura, tranne quelle che agiscono lungo l’asse di rotazione
o di traslazione del link.
Quindi i motori, per mantenere l’equilibrio statico, dovranno generare un
momento pari a:
Nel caso di giunto prismatico la forza sarà:
Oss: per noi il momento torcente è positivo se diretto in senso antiorario.
2
ESERCIZIO: Considerato il manipolatore planare di figura calcolare i momenti
che devono generare gli attuatori ai giunti per equilibrare la forza esterna
3F=(Fx,Fy,0):
3
In generale si può dimostrare che lo jacobiano lega la forza sull’end-effector con
i momenti applicati ai giunti:
r
r
τ = JT f
4
Modello Dinamico Del Manipolatore
Ci permette di risolvere due problemi:
1. Supposti noti i momenti/forze applicate ai giunti quale sarà il moto seguito
dal manipolatore (simulatore).
2. Date la traiettorie dei giunti Ө(t), Ө’(t), Ө’’(t), determinare i momenti/forze
richiesti ai giunti per attuare tale moto (controllo).
Le equazioni dinamiche necessitano le accelerazioni lineari ed angolari di ogni
link.
Accelerazione Lineare ed Angolare di un corpo rigido
Per determinare l’accelerazione lineare ed angolare di un corpo rigido possiamo
derivare le velocità:
Supponiamo inizialmente che il corpo rigido possa solo ruotare attorno all’asse
definito da AΩB , vogliamo determinare l’accelerazione lineare del punto Q
(che può muoversi sul corpo rigido, nel sdr. {B} ).
Sappiamo che la velocità di Q rispetto al sdr. {A} è:
che possiamo esprimere anche come:
Derivando la velocità otteniamo l’accelerazione:
5
Sostituendo e generalizzando (al posto di Q mettiamo V):
Se consideriamo anche l’accelerazione dovuta alla
traslazione di {B} rispetto {A}, e supponiamo che
il punto Q sia solidale a {B}, BVQ=BV’Q=0
Accelerazione Angolare di un Corpo Rigido
Consideriamo un sdr. {B} che ruota relativamente ad {A} con velocità
angolare AΩB , e un sdr. {C} che ruota rispetto {B} con velocità angolare BΩC,
({C} è il sdr. solidale con il corpo rigido) allora :
Se differenziamo:
Useremo questa eq. per calcolare la velocità angolare del link i-esimo
6
Equazioni di Newton e Eulero
Quando abbiamo a che fare con un corpo rigido, per poterlo accelerare e
decelerare dobbiamo applicarvi delle forze e dei momenti:
Eq. Newton
Eq. Eulero
Dove CI è il tensore di inerzia calcolato nel sdr. {C} che ha origine nel centro di
massa del corpo rigido. N rappresenta il momento che permette di ruotare il
corpo con velocità angolare ω e accelerazione angolare ω’.
Dimostrazione eq. di Eulero in un caso particolare:
7
Calcolo del tensore di inerzia I
Per un corpo rigido libero di muoversi nello spazio ci sono infiniti assi di
rotazione possibili, quindi ci serve uno strumento matematico che ci permetta di
descrivere la distribuzione di massa del corpo rigido in modo completo.
Consideriamo un sdr. {A} solidale con il corpo rigido, il tensore di inerzia AI è
una matrice simmetrica 3x3:
Dove gli elementi sulla diagonali sono detti
Momenti di Inerzia, mentre quelli esterni sono
detti Prodotti di Inerzia.
Queste 6 quantità indipendenti, per un certo corpo
sono funzione del tipo di sdr. {A} scelto
Se scegliamo un sdr. tale per cui tutti i prodotti di inerzia sono nulli
IXY=IXZ=IYZ=0 allora gli assi del sdr. scelto vengono detti assi principali di
inerzia, e i momenti di inerzia ad essi associati vengono detti momenti di inerzia
principali.
E’ possibile ricavare i momenti di inerzia e i prodotti di inerzia rispetto ad assi
paralleli rispetto a quelli utilizzati per il calcolo del tensore di inerzia
utilizzando le seguenti equazioni:
Dove xC , yC, e zC rappresentano le coordinate del sdr. {C} collocato con
l’origine nel centro di massa del corpo rigido.
In modo analogo, permutando x y e z, si calcolano anche gli altri momenti di
inerzia e prodotti di inerzia.
8
ESERCIZIO: Determinare il Tensore di Inerzia del solido rappresentato in
figura. La densità del materiale è ρ, calcolare il tensore rispetto il sdr. {A}. AI
9
10
")