Misure indirette
Si parla di misura indiretta tutte le volte in cui la misura di una grandezza non viene fatta riportando
l’unità campione sulla grandezza da misurare, ma viene ricavata indirettamente attraverso relazioni di
tipo analitico, geometrico od altro, legate alla grandezza che si vuole misurare.
Ad esempio se si vuol conoscere la lunghezza della diagonale di una stanza rettangolare, basterà
misurare la base e l’altezza del rettangolo e poi applicare il teorema di Pitagora, ecc..
Se però si vuol conosce la precisione del risultato o per meglio dire, lo scarto quadratico medio (sqm)
della misura indiretta, questo dipenderà dalla precisione con cui sono state misurate le grandezze ad
essa correlate. Si userà alternativamente, a costo di mancare di rigore, il termine “precisione” indicando
lo scarto quadratico medio della misura.
Ammesso che di ogni grandezza ottenuta con misure dirette si conosca la precisione, perché misurata
più volte, vogliamo conoscere il valore medio e la precisione della grandezza da misurare G.
G = f (x1, x2, x3,…, xn)
Il valore più corretto della grandezza G, il suo valore medio, si ricava da:
Gm= f (x1m, x2m, x3m,…, xnm)
La varianza del valor medio si ricava dalla relazione:
2
σ
2
G
2
⎛ ∂ G ⎞
2 ⎛ ∂ G ⎞
2 ⎛ ∂ G ⎞
= σ ⎜
⎟
⎟ + σ x 2 ⎜
⎟ +.....+ σ xn ⎜
⎝ ∂ x1 ⎠
⎝ ∂ x2 ⎠
⎝ ∂ xn ⎠
2
2
x1
da cui si ricava lo scarto quadratico medio.
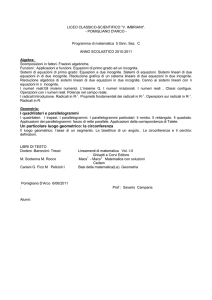
Esercizio 1: Misura indiretta di un lato opposto a un vertice di un triangolo con la formula di Carnot
In un triangolo ABC si conoscono:
BC = 120,07 m ± 2 cm
BA = 121,66 m ± 2 cm
ˆ = β = 50g,673 ± 50cc.
ABC
Si vuole determinare la lunghezza del lato AC e
la sua precisione.
2
2
AC = AB + BC − 2 AB × BC × cos β = 121,662 + 120,072 − 2 ×121,66 ×120,07 × cos50 g ,673
1
Giuseppe Manzino – Topografia
© Calderini, RCS Libri Education
Il valor medio del lato sarà dunque AC = 93, 70 m.
2
La varianza del valor medio sarà:
σ
2
AC
=σ
2
AB
2
⎛ ∂AC ⎞
2 ⎛ ∂AC ⎞
2 ⎛ ∂AC ⎞
⎜
⎟ + σ BC ⎜
⎟ + σ β ⎜
⎟
⎝ ∂AB ⎠
⎝ ∂BC ⎠
⎝ ∂β ⎠
2
Le derivate valgono:
∂AC
=
∂AB
−1
2
(2 AB − 2 BC × cos β ) =
2
AB + BC − 2 × AB × BC × cos β
BC × cos β − BC
= − 0, 40
AC
∂AC
−1
BC − AB × cos β
=
(2 BC − 2 AB × cos β ) = −
= −0,34
∂BC 2 .....
AC
∂AC
−1
=
(2 AB × BC × senβ ) = −111, 4 m
∂β 2 .....
2
2
2
2
σ AC
= 0, 022 × ( − 0, 4 ) + 0, 022 × ( − 0,34 ) + (7,85 ×10− 5 ) 2 × ( −111, 4 ) = (6, 4 ×10 −5 + 4, 62 ×10 −5 + 8, 06 × 10−5 ) m 2
2
σ AC
= 1,908 ×10− 4 m 2
⇒
σ AC = ± 0, 014 m
Si vede che a degradare la precisione della misura indiretta concorre principalmente l’imprecisione
dovuta alla misura angolare.
Vi è comunque una condizione che, a parità di errore quadratico medio delle distanze, rende minimo il
contributo dell’errore angolare alla varianza del lato AC . (Si propone come esercizio da svolgere).
Esercizio 2: Si voglia determinare l’area del triangolo precedente e la sua precisione ( cioè il suo sqm).
1
1
AB × BC × sen β = 121, 66 ×120, 07 × sen 50 g , 673 = 5218,92 m 2
2
2
2
2
2
2
2 ⎛ ∂A ⎞
2 ⎛ ∂A ⎞
2 ⎛ ∂A ⎞
σ A = σ AB ⎜
⎟ + σ BC ⎜
⎟ + σ β ⎜ ⎟
⎝ ∂AB ⎠
⎝ ∂BC ⎠
⎝ ∂β ⎠
⎛ ∂A ⎞ 1
⎜
⎟ = BC × sen β = 42,90 m
⎝ ∂AB ⎠ 2
A=
⎛ ∂A ⎞ 1
⎜
⎟ = AB × sen β = 43, 47 m
⎝ ∂BC ⎠ 2
⎛ ∂A ⎞ 1
2
⎜ ∂β ⎟ = 2 AB × BC × cos β = 5109, 72 m
⎝ ⎠
2
2
2
σ A2 = 0, 022 × ( 42,9 ) + 0, 022 × ( 43, 47 ) + (7,55 ×10−5 ) × (5109, 72 ) = σ A2 = 1, 65 m 4
σ A = ±1, 29 m 2
2
Giuseppe Manzino – Topografia
© Calderini, RCS Libri Education
Dall’ultima derivata si vede come l’errore angolare è minimo quando cos β =0 , cioè β =100g.
Da questa ultima considerazione si deduce che si può utilizzare anche un goniometro impreciso quando
l’angolo β è prossimo all’angolo retto perché l’imprecisione dell’area non è influenzata dalla
imprecisione del goniometro. Per questo motivo, operativamente nel rilievo per coordinate polari di un
appezzamento, ai fini del calcolo dell’area, conviene mettersi in stazione in una posizione in cui gli
angoli siano possibilmente prossimi ad angoli retti (ad esempio per una figura quadrangolare in
posizione grossomodo baricentrica).
Esercizio 3: Misura indiretta con le formule dei seni
In un triangolo ABC si conoscono:
BC = 190,53 m ± 2 cm
CA = 142,33 m ± 2 cm
ˆ = β = 31g,456 ± 100cc.
CBA
Si vuole determinare la lunghezza del lato AB e
la sua precisione.
Dal teorema dei seni si ricava:
sen α =
BC
× sen β
AC
⎛ BC
⎞
× sen β ⎟ = 43g , 7878
⎝ AC
⎠
α = arcsen ⎜
⇒
2
2
σα = σ
2
BC
2
⎛ ∂α ⎞
2 ⎛ ∂α ⎞
2 ⎛ ∂α ⎞
⎜
⎟ + σ AC ⎜
⎟ + σ β ⎜
⎟
⎝ ∂BC ⎠
⎝ ∂AC ⎠
⎝ ∂β ⎠
2
1
1
sen β
⎛ ∂α ⎞
×
× sen β =
= 4,3 ×10− 3 [1/ m ]
⎜
⎟ =
2
∂
BC
AC
cos α × AC
⎝
⎠
1− x
⎛ − BC
⎞
1
⎛ ∂α ⎞
× ⎜
× sen β ⎟ = −5, 77 ×10− 3 [1/ m ]
⎜
⎟ =
2
⎝ ∂AC ⎠ cos α ⎝ AC
⎠
⎛ BC
⎞
⎛ ∂α ⎞
1
× ⎜
× cos β ⎟ = 1,525 [g] = 5109, 72
⎜
⎟ =
⎝ ∂β ⎠ cos α ⎝ AC
⎠
2
2
2
2
σα2 = 0,032 × ( 4,31×10− 3 ) + 0,032 × ( −5,77 ×10− 3 ) + (1,57 ×10−4 ) × (1,525) = 1,04 ×10−7
σα = ± 3, 22 ×10− 4 rad ; σ α = ± 205 cc
Di nuovo, col teorema dei seni
3
Giuseppe Manzino – Topografia
© Calderini, RCS Libri Education
γ = 200 g − (α + β ) = 124 g , 7562
AB =
AC
× sen γ
sen β
⇒
AB = 277, 71 m
σ γ = 1002 + 2052 = ± 228cc
2
2
2
σ AB = σ
2
AC
⎛ ∂AB ⎞
⎛ ∂AB ⎞
2 ⎛ ∂AB ⎞
+ σ γ2 ⎜
⎟
⎜
⎟ + σ β ⎜
⎟
⎝ ∂AC ⎠
⎝ ∂β ⎠
⎝ ∂γ ⎠
2
∂AB sen γ
=
= 1,951[g]
∂AC senβ
∂AB
sen γ
= − AC ×
= −515,54 m
∂β
sen 2 β
∂AB
cos γ
= AC ×
= −113, 79 m
∂γ
sen β
2
2
2
2
σ AB
= 0,032 × (1,951) + (1,571⋅10− 4 )2 × ( −515,54 ) + (3,581⋅10− 4 ) 2 × ( −113,79 ) = 0,011665
σ AB = ± 0,11 m
Esercizio 4: Si calcoli la precisione del metodo stadimetrico per il calcolo della distanza
Note le letture alla stadia
l1= 2,583 m ± 1 mm
l2= 1,000 m ± 1 mm
ϕ = 91g,812 ± 100cc
D = K × S × sen2ϕ = 155,70 m
S = l1 − l2 = 1,583m ± 1 mm 2
2
⎛ ∂D ⎞
2 ⎛ ∂D ⎞
σ D = σ ⎜
⎟ + σ ϕ ⎜ ⎟
⎝ ∂ S ⎠
⎝ ∂ϕ ⎠
2
2
2
S
⎛ ∂D ⎞
2
⎜
⎟ = K × sen ϕ = 90,35 [g]
⎝ ∂ S ⎠
⎛ ∂D ⎞
⎜ ∂ϕ ⎟ = 2 K × S × sen ϕ × cos ϕ = 40, 27 m
⎝
⎠
2
2
σ D2 = 0,00142 × (98,35) + (1,571⋅10− 4 )2 × (40, 27 ) = 0,01904
⇒
σ D = ± 0,14 m
Si può notare che l’imprecisione del goniometro non influenza la precisione della misura della distanza
per ϕ =100g.
4
Giuseppe Manzino – Topografia
© Calderini, RCS Libri Education
Esercizio 5: Si calcoli la precisione del metodo stadimetrico per il calcolo del dislivello
Si considerano i seguenti valori:
l1= 1,583 m ± 1 mm
l2= 1,000 m ± 1 mm
lm=1,290 m ± 1 mm
ϕ = 91g,812 ± 100cc
hs= 1,58 m ± 3 mm
Δ = D × cot g ϕ + hs − lm = 155, 70 × cotg 91g ,812 + 1,58 − 1, 29 = 20, 43m
2
2
2
⎛ ∂Δ ⎞
2 ⎛ ∂Δ ⎞
2 ⎛ ∂Δ ⎞
2 ⎛ ∂Δ ⎞
σ Δ = σ ⎜
⎟ + σ ϕ ⎜ ⎟ + σ hS ⎜
⎟ + σ lm ⎜ ⎟
⎝ ∂ D ⎠
⎝ ∂hS ⎠
⎝ ∂lm ⎠
⎝ ∂ϕ ⎠
⎛ ∂Δ ⎞
⎛ ∂Δ ⎞
⎜
⎟ = cotg ϕ = 0,129 [g]
⎜
⎟ = 1;
⎝ ∂ D ⎠
⎝ ∂hS ⎠
−1
⎛ ∂Δ ⎞
⎛ ∂Δ ⎞
⎜ ⎟ = −1
⎜ ∂ϕ ⎟ = D × sen 2 ϕ = 160,95 m
⎝ ∂lm ⎠
⎝
⎠
2
2
2
D
2
2
2
2
σ Δ2 = 0,142 × ( 0,129 ) + (1,571×10− 4 ) 2 × (160,95 ) + 0, 0032 × (1) + 0, 0012 × (1) = 9, 75 ⋅10− 4 m 2
σ Δ = ± 0, 03 m
Esercizio 6: Si calcoli la precisione di una distanza valutata con il metodo dell’angolo parallattico
variabile.
ϕ1= 98g,918 ± 20cc
ϕ2= 100g,236 ± 20cc
l1= 2,900 m ± 1 mm;
l2= 0,300 m ± 1 mm
D=
l1 − l2
cotg ϕ1 − cotg ϕ2
= 125,58 m
2
2
2
2
⎛ ∂D ⎞
⎛ ∂D ⎞
2
2 ⎛ ∂D ⎞
2 ⎛ ∂D ⎞
σ = σ ⎜ ⎟ + σ l2 ⎜
+ σ ϕ1 ⎜
⎟ + σ ϕ 2 ⎜ ∂ϕ 2 ⎟
⎜ ∂l ⎟⎟
∂
ϕ
1 ⎠
⎝
⎝
⎠
⎝ ∂l1 ⎠
2
⎝
⎠
2
D
2
l1
⎛ ∂D ⎞
⎛ ∂D ⎞
1
= 4,83 [g] = − ⎜
⎜
⎟ =
⎟
⎝ ∂l1 ⎠ cotg ϕ1 − cotg ϕ2
⎝ ∂l2 ⎠
⎛ −1 ⎞
l2 − l1
⎛ ∂D ⎞
× ⎜
⎟ = − 6065, 6 m
⎜ ∂ϕ 1 ⎟ =
2
2
⎝
⎠ ( cotg ϕ1 − cotg ϕ2 ) ⎝ sen ϕ1 ⎠
⎛ 1 ⎞
l2 − l1
⎛ ∂D ⎞
× ⎜
⎟ = 6066, 79 m
⎜ ∂ϕ 2 ⎟ =
2
2
⎝
⎠ ( cotg ϕ1 − cotg ϕ2 ) ⎝ sen ϕ 2 ⎠
2
2
2
σ D2 = ⎡0,12 × ( 48,3) ⎤ × 2 + (3,14 ×10− 5 )2 × ⎡( 6065, 6 ) + ( − 6066,8 ) ⎤ = 0, 0773m 2
⎣
σ Δ = ± 0, 28m
⎦
⎣
⎦
5
Giuseppe Manzino – Topografia
© Calderini, RCS Libri Education
Allo stesso risultato si perviene approssimando l’intervallo di stadia ad un arco di circonferenza di cui
si conosce la lunghezza e l’angolo al centro ed è incognito il raggio.
S
D=
ω
ω = ϕ1 − ϕ2 = 1g ,318 ± 28cc , 28
2
⎛ ∂D ⎞
⎛ ∂D ⎞
σ D = σ ⎜ ⎟ + σ ω2 ⎜ ⎟
⎝ ∂S ⎠
⎝ ∂ω ⎠
⎛ ∂D ⎞ 1
⎜
⎟ = = 48,30 [g]
⎝ ∂S ⎠ ω
⎛ ∂D ⎞ − S
⎜
⎟ = 2 = 6080, 25 m
⎝ ∂ω ⎠ ω
2
2
2
S
s 2 D = (0, 00141)2 × (48,3) 2 + (4, 44 ×10− 5 ) 2 × (6080, 25) 2 = 0, 00776 m 2
sD = ± 0, 28m
Conclusioni: con il metodo dell’angolo parallattico variabile si può sostituire a quello dell’angolo
parallattico costante per portate dell’ordine dei 130÷150 m, ottenendo la stessa precisione se si
osservano intervalli di stadia ampi e si utilizza un goniometro preciso a 10cc. Non dovendo poi stimare
una lettura alla stadia ma potendo decidere dove collimarla, lo si fa ad un decimetro esatto e così si
aumenta il potere separatore dell’occhio umano, potendo così spingere il metodo a distanze un poco
superiori.
Esercizio 7: Studiare una formula per la tolleranza nella misura diretta di una distanza ottenuta con un
longimetro.
Si faccia l’ipotesi che il longimetro sia la canna triplometrica: d= 3m ±1cm
D = d + d + d + ….+ d (n volte)
2
2
2
⎛ ∂D ⎞
⎛ ∂D ⎞
⎛ ∂D ⎞
σ D2 = σ d2 ⎜ ⎟ + σ d2 ⎜ ⎟ + ... + σ d2 ⎜ ⎟
⎝ ∂d ⎠
⎝ ∂d ⎠
⎝ ∂d ⎠
(n volte)
⎛ ∂D ⎞
⎜ ⎟ = 1
⎝ ∂d ⎠
2
2
σD
⎛ ∂D ⎞
2
= n × σ × ⎜
⎟ = n × σ d
⎝ ∂ d ⎠
2
d
con n =
D
d
6
Giuseppe Manzino – Topografia
© Calderini, RCS Libri Education
σ D2 = σ d2 ×
D
d
da cui σ D =
σd
d
× D
ed essendo σ d e d delle costanti
σD = k × D
Nel nostro caso la costante k vale 0, 01/ 3 = 0, 00577
La tolleranza è tre volte l’errore quadratico medio per cui con T = 0, 02 × D [m]
Gli errori sistematici riguardano l’imperfetta sistemazione della fine di una canna con l’inizio della
successiva, l’imperfetto allineamento, l’imperfetta orizzontalità dell’asta ecc.
Si ipotizza ragionevolmente che, in condizioni agevoli di misura (in piano), questo errore sia
riconducibile ad 1 cm ogni alzata.
D
L’errore complessivo sarà quindi n volte 1 cm , cioè
× 0, 01 = 0, 003 × D
3
Si può produrre quindi una formula finale per la tolleranza che vale:
T = 0, 02 × D + 0, 003 × D (con D in metri)
Esercizio 8: Valutare la formula della tolleranza nella misura dell’errore di chiusura di un anello di
livellazione geometrica.
n
In un anello di livellazione la somma di tutti i dislivelli dovrebbe tornare zero:
∑Δ
ij
=0
i=1
n
Indicando invece con E l’errore di chiusura
∑Δ
ij
= E calcoleremo l’errore dell’errore di chiusura.
i =1
2
2
σE =σ
2
Δ12
2
⎛ ∂E ⎞
2 ⎛ ∂E ⎞
2 ⎛ ∂E ⎞
⎟ + ... + σ Δn1 ⎜
⎟
⎜
⎟ + σ Δ 23 ⎜
⎝ ∂Δ12 ⎠
⎝ ∂Δ 23 ⎠
⎝ ∂Δ n1 ⎠
2
(n termini)
⎛ ∂E ⎞
⎜
⎟ = 1 ; σ Δ12 = σ Δ 23 = ... = σ Δn1 = σ Δ
⎝ ∂Δ12 ⎠
σ E2 = n × σ Δ2 ;
σE = σΔ × n
In una livellazione geometrica è ragionevole ritenere che la lunghezza dei lati sia pressoché uguale, per
cui, indicando con D la lunghezza complessiva dell’anello:
D D
D
D
n= =
= ... =
=
d
12 23
n1
σ
σE = Δ × D = k × D
d
7
Giuseppe Manzino – Topografia
© Calderini, RCS Libri Education
Esempio numerico: ipotizzando una lunghezza dei lati di circa 70,80 m
Δ12 = l1 − l2
σ l1 = σ l 2 = ±1 mm
σ Δ = ± 1 mm × 2
12
con 6 lati
σ E = ±1 mm × 2 × 6 = ± 3, 46 mm
La tolleranza è 3 volte l’errore quadratico medio per cui si otterrebbe TD = ±10 mm
ESERCIZI DA SVOLGERE
1) Calcolare l’area e l’errore commesso nel calcolo dell’area di un triangolo scaleno noti i tre lati
a = 120,30 m ; b = 111,76 m; c =98,96 m . I lati hanno scarto quadratico medio ± 3 cm.
Soluzione: A = 5173,60 m2 ± 0,17 m2
2) Una particella catastale di forma perfettamente rettangolare ha le dimensioni dei lati che sono state
lette graficamente in mappa in scala 1:2000 con uno scalimetro di precisione ricavandone b = 1,21 cm;
h = 7,93 cm. Valutare l’area in ha, a, ca, il suo scarto quadratico medio e l’errore percentuale,
assumendo un valore congruo per l’errore di graficismo.
Soluzione: assunto il minimo errore di graficismo pari ad un decimo di mm si ha: A= 0 ha 38 a 38 ca ±
32 ca ; errore percentuale: circa 1%
Metodo dei minimi quadrati
È buona norma in ogni pratica di misura controllare le misure stesse, sia per evitare errori grossolani sia
per migliorare la precisione del risultato finale. Ciò si ottiene ripetendo più volte le misure dirette. Un
metodo aggiuntivo, specie quando si ha a che fare con misure indirette, è quello di aggiungere misure
legate con un legame funzionale fra di loro.
Ad esempio, per determinare la forma e le dimensioni di un quadrilatero è buona norma misurare, oltre
ai lati, anche le due diagonali.
Nel caso in esame sia le misure dirette, come le distanze, sia le misure indirette, come ad esempio la
superficie del quadrilatero o le coordinate dei vertici, sono condizionate da queste leggi.
Un altro esempio può essere la misura dei tre angoli di un triangolo piano. La legge lineare che lega
queste misure è che la somma degli angoli deve essere l’angolo piatto.
Più generalmente un insieme di m misure, che indichiamo con y1, y2, ym possono essere legate da m
relazioni a n parametri incogniti (che in genere sono coordinate) da relazioni funzionali.
Facciamo qui l’ipotesi che il numero di misure superi il numero di incognite e che le relazioni siano
funzioni lineari.
In questo modo possiamo scrivere un sistema di equazioni sovrabbondanti rispetto al numero di
incognite, (di per sé è un sistema impossibile).
a11 x1 + a12 x2 +…+ a1n xn = y1
….........
am1 x1 + am2 x2 + …+ amn xn= ym
8
Giuseppe Manzino – Topografia
© Calderini, RCS Libri Education
il sistema ha m equazioni in n incognite, con m > n e alla destra dell’uguale i termini noti
rappresentano le misure eseguite a cui si sommano eventuali quantità note e costanti.
Un sistema di questo genere, come accennato è impossibile, per questo, per trovare una soluzione serve
qualche considerazione statistica e non geometrica.
Facciamo subito un semplice esempio: una rete di livellazione costituita da tre vertici di cui due di
quota incognita ed uno di quota nota.
Le misure siano i tre dislivelli fra i vertici. In questo caso quindi m = 3 ed n = 2.
Chiamando con x1, x2, x3 le tre quote e y1, y2, y3 i tre dislivelli misurati si può scrivere:
x2 − x1 = y1
x3 − x2 = y2
x3 − x1 = y3
Ora ci rendiamo conto però che una di queste quote è nota, ad esempio x1 e che, portando a destra i
termini noti il sistema diviene
x2 + 0 x3 = y1 + x1
− x2 + x3 = y2
0 x2 + x3 = y3 + x1
Si nota che è un sistema di tre equazioni in due incognite (n = 2).
Indichiamo con T il vettore dei termini noti (in numero uguale alle misure m) e con A la matrice dei
coefficienti che in questo semplice esempio vale:
⎡ 1 0 ⎤
A = ⎢⎢ −1 1 ⎥⎥
⎢⎣ 0 1 ⎥⎦
AX = T
In un problema generale, in forma matriciale si può scrivere:
oppure
AX − T = 0
Se il numero n di equazioni fosse uguale al numero m di incognite e tutte le equazioni fossero tra di
loro indipendenti si potrebbe trovare la soluzione moltiplicando a sinistra per A−1 cioè:
A−1 A X = A−1T
cioè
X = A−1T
Tuttavia, passando al sistema iperdeterminato non sarà mai vero che le misure reali soddisfano tutte e
tre le equazioni.
Qualsiasi valore noi scegliamo per le incognite x, rappresentato dal vettore X, potremmo al massimo
soddisfare nell’esempio due su tre equazioni e, in genere, solo n equazioni potrebbero essere
soddisfatte esattamente.
Ammettiamo allora che nessuna delle equazioni sia soddisfatta esattamente e che tutte le equazioni
forniscano uno scarto che indicheremo vettorialmente con V.
AX − T = V
V è il vettore degli scarti formato da m elementi, quanti le misure stesse.
La matrice dei coefficienti A è chiamata anche matrice disegno.
9
Giuseppe Manzino – Topografia
© Calderini, RCS Libri Education
A questo punto non ci arrendiamo all’idea che il sistema sia geometricamente impossibile a risolversi.
Siccome ammettiamo che, proprio per questa impossibilità esista per ogni equazione di misura uno
scarto, fra le infinite soluzioni possibili (per l’esattezza infinite elevato a m−n) scegliamo quella sola
soluzione che rende minimo questo scarto secondo una certa legge.
Per l’esattezza scegliamo quelle incognite che rendono minima la somma del quadrato degli scarti (da
ciò deriva il nome “principio dei minimi quadrati”).
Un altro modo per comprendere ciò che rendiamo minimo è osservare che gli scarti, indicati con V
rappresentano un vettore, il quadrato del suo modulo è appunto V T V che è la quantità che cercheremo
di minimizzare.
Imponendo questa condizione troveremo quei valori di x che saranno le soluzioni che soddisfano “al
meglio” alle equazioni che rendono cioè la somma dei quadrati degli scarti minima. Occorre scrivere:
∑
m
i =1
vi2 = min
Nel caso di misure di differente precisione occorre tener conto delle singole precisioni attraverso i pesi
per cui la precedente relazione assume la forma
m
∑pv
j
j =1
2
j
= min
Primo caso: Misure di egual precisione
L’equazione si traduce in forma matriciale col prodotto del vettori scarti per il suo trasposto
V TV = min
Cioè
T
( AX − T ) ( AX − T ) = min
X T AT AX T − 2T T AX T + T T T = min
Il minimo di queste equazioni si ottiene derivandole per il vettore ed uguagliando a zero la derivata
(come per le funzioni continue).
∂ (V T V )
T T
T
= 2 X A A − 2T A = 0
∂X
Si ricava così la soluzione:
−1
T
X = ( AT A) A T
Dopo aver ricavato le incognite si calcoleranno gli scarti
AX
−
T =V
Dagli scarti occorre stimare la varianza dell’unità di peso
0
m
vi2
V TV
=
m−n m−n
∑
σˆ =
2
j =1
Cioè σˆ 0 è la sommatoria degli scarti al quadrato fratto il numero di equazioni meno il numero delle
incognite cioè fratto la ridondanza del sistema.
2
10
Giuseppe Manzino – Topografia
© Calderini, RCS Libri Education
Infine si ricava la precisione delle incognite attraverso la “matrice di varianza covarianza
C = σˆ 0 2 ( AT A)
−1
I termini diagonali della matrice sono le varianze (i quadrati degli scarti quadratici medi) delle
incognite.
Secondo caso: Misure di differente precisione
m
∑pv
j
j =1
2
j
= min
L’equazione ai minimi scarti si traduce in forma matriciale col prodotto del vettori scarti per il suo
trasposto
V T PV = min
Derivando le equazioni
T
( AX − T ) P ( AX − T ) = min
T
T
T
T
X A PAX − 2T PAX + T PT = min
Il minimo di queste equazioni si ottiene derivandole per il vettore X ed uguagliando a zero la derivata
(come per le funzioni continue).
∂ (V T V )
T T
T
= 2 X A PA − 2T PA = 0
∂X
−1
Si ricava così la soluzione
T
X = ( AT PA) A PT
In modo analogo al precedente si ricavano
0
n
pi ν i2 V T PV
=
n−m
n−m
σ =∑
2
i =1
e la precisione delle incognite attraverso la “matrice di varianza covarianza
C = σˆ 0 2 ( AT PA)
−1
Esercizio: Compensazione di una rete di livellazione di precisione
Si è eseguita la seguente livellazione geometrica chiudendo gli
anelli tra ABC e ACD, ottenendo i seguenti dislivelli:
ΔAB= 6,315 m
ΔBC= -3,272 m
ΔAC= 3,050 m
ΔCD= -2,508 m
ΔDA= -0,540 m
QA= 10,000 m
11
Giuseppe Manzino – Topografia
© Calderini, RCS Libri Education
Partendo dalla quota del punto A fissata a 10,000 m calcolare le quote degli altri punti .
Si scrivono le seguenti equazioni di condizione indipendenti:
ΔAB = QB − QA
ΔBC = QC − QB
ΔAC = QC − QA
ΔCD = QD − QC
ΔDA = QA − QD
che, in forma matriciale, ricordando che QA è nota e lasciando come incognite le quote degli altri tre
punti B, C e D si può scrivere:
1
−1
0
0
0
0
1
1
−1
0
0
0
0
1
−1
×
QB
QC
QD
+
−QA
0
−QA
−QA
0
Δ AB
Δ BC
=
Δ AC
Δ CD
Δ DA
Si intravede la classica formulazione A x + l = T la cui soluzione si ottiene prima moltiplicando tutti i
termini per At e poi isolando l'incognita x:
At A x + At l = At T
At A x = At T − At l
( At A )−1 (At A) x = ( At A ) −1 At (T − l )
x = ( At A )−1 At (T − l )
Nel nostro caso:
A=
1
−1
0
0
0
0
1
1
−1
0
0
0
0
1
−1
x=
QB
QC
QD
l=
−QA
0
−QA
−QA
0
=
−10
0
−10
−10
0
Δ AB
Δ BC
T=
Δ AC
Δ CD
Δ DA
12
Giuseppe Manzino – Topografia
© Calderini, RCS Libri Education
2 −1 0
t
A A = −1 3 −1
0 −1 2
( At A)
−1
0,625 0 , 25 0 ,125
0, 25 0,5 0, 25
0,125 0, 25 0 ,625
=
QB
19,587
t
A (T − l ) = 12, 286
8,032
x=
=
QC
QD
16,317
13,048
10,540
Si calcolano ora gli scarti:
v=
16,317 −16,315
13,048 −13,050
10,540 −10,540
=
0,002
− 0 ,002
0,000
L’errore quadratico medio dell’unità di peso s0 si ricava da:
vt v 1
σ =
=
n −1 2
2
0
0,002 0,002 0,002
0,002
2( 0,002 )2
− 0, 002 =
= 0, 000004
2
0,000
La varianza delle tre quote si ricava da:
2 ⎛ t ⎞
C = σ 0 ⎜ A A ⎟
xx
⎝
⎠
σ
σ
σ
−1
C
xx
= 4 × 10
−6
0,625 0, 25
0, 250 0,50
0,125 0, 25
0,125
0, 250
0,625
−3
QB
= 1, 58 × 10 m
−3
QC
= 1, 41 × 10 m
−3
QD
= 1, 58 × 10 m
Esercizio: Compensazione di una rete di livellazione di precisione per misure pesate
Si debba compensare la precedente livellazione geometrica tenendo conto di differenti precisioni nella
misura dei dislivelli che, come dimostrato, sono inversamente proporzionali alla lunghezza della
livellazione geometrica, cioè:
σ
2
Δ ij
= k × d essendo i pesi inversamente proporzionali alle varianze
ij
13
Giuseppe Manzino – Topografia
© Calderini, RCS Libri Education
p
Δ ij
=
1
1
= k *×
k × dij
dij
con k * costante arbitraria.
Volendo pesare i dislivelli in funzione del percorso si assumono i seguenti percorsi:
AB = 680 m;
BC = 860 m;
AC = 1030 m;
CD = 750 m;
AD = 550 m.
I pesi si possono assumere tutti maggiori di 1 fissando k = 1030 m
pAB = 1030/680 = 1,5147; pBC = 1030/860 =1,1977; pAC = 1; pCD = 1;3733; pDA= 1,8727
1,515
0
P=
0
1,198
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
t
A PA =
1,373 0
0 1,873
2,712 −1,198
0
3,571 −1,373
simm.
3, 246
28,631
t
A P (T − l ) = 12,576
16, 294
(
QB
x=
QC
QD
=
At PA
)
−1
=
0 , 448 0 ,179 0 ,076
0 , 406 0 ,172
simm.
0,381
16,317
13,047
10,540
Come si vede il risultato è quasi identico al precedente.
Misura indiretta di piu’ grandezze con il metodo delle osservazioni indirette
Ammettiamo che una misura indiretta non sia funzione lineare di altre misure dirette come visto nel
precedente paragrafo, ma sia funzione fisica o geometrica non lineare di un certo numero n di variabili
indipendenti con cui poter scrivere una serie di m equazioni così fatte:
f1 ( x1, x2, … , xn) = t1
f2 ( x1, x2, … , xn) = t2
.......
fn ( x1, x2, … ,xn) = tn
14
Giuseppe Manzino – Topografia
© Calderini, RCS Libri Education
tale sistema non lineare si può linearizzare a partire da valori approssimati di x1, x2, … , xn cosicché
0
0
∂f1
∂f
∂f
x1 − x10 ) + 1 ( x2 − x20 ) + ... + 1 ( xn − xn0 )
(
∂x1
∂x2
∂xn
0 ⎞
f 1 ( x1 , x2 ,..., xn ) = f 1 ⎜⎝ x1 , x1 x1 ⎟⎠ +
⎛
0
0
0 ⎞
f 2 ( x1 , x2 ,..., xn ) = f 2 ⎜⎝ x1 , x1 x1 ⎟⎠ +
⎛
∂f 2
∂f
∂f
x1 − x10 ) + 2 ( x2 − x20 ) + ... + 2 ( xn − xn0 )
(
∂x1
∂x2
∂xn
....
0
0
0 ⎞
fn ( x1 , x2 ,..., xn ) = fn ⎜⎝ x1 , x1 x1 ⎟⎠ +
⎛
∂f n
∂f
∂f
x1 − x10 ) + n ( x2 − x20 ) + ... + n ( xn − xn0 )
(
∂x1
∂x2
∂xn
Le precedenti equazioni trascendenti si ripropongono così in forma lineare ed è possibile scriverne la
versione matriciale nel seguente modo:
⎛
⎞
f
⎛
2 ⎜
,
⎝ 1
x x1 , ..., x
⎞
⎟
n ⎠
f x x2 , ..., x
=
f
f
⎛ 0
2 ⎜
,
⎝ 1
0
0 ⎞
0
0 ⎞
⎟
n ⎠
x x1 , ..., x
0 ⎞
⎟
n ⎠
0
f x x2 , ..., x
0 ⎞
⎟
n ⎠
0
f x x2 , ..., x
+
∂f 2
∂x1
0 ⎞
⎟
n ⎠
∂f1
∂f
..... 1
∂x2
∂xn
∂f 2
∂f
.... 2
∂x2
∂xn
. . .
∂f m
∂x1
×
∂f m
∂f
.... m
∂x2
∂xn
x1 − x10
x 2 − x20
....
xn − xn0
=
↓
+
↓
× ↓
=
l
+
A
×
∂f1
∂x1
+
∂f 2
∂x1
∂f1
∂f
..... 1
∂x2
∂xn
∂f 2
∂f
.... 2
∂x2
∂xn
. . .
. . . . .
⎛ 0
m ⎜
,
⎝ 1
0
x x1 , ..., x
⎛ 0
m ⎜
,
⎝ 1
⎞
⎟
n ⎠
f 1 ⎜⎝ x1 , x2 , ..., xn ⎟⎠
⎛ 0
2 ⎜
,
⎝ 1
0 ⎞
. . . . .
⎛
m ⎜
,
⎝ 1
0
0
f 1 ⎜⎝ x1 , x2 , ..., xn ⎟⎠
. . . . .
⎛
0
⎛
f 1 ⎜⎝ x1 , x2 , ..., xn ⎟⎠
∂f1
∂x1
∂f m
∂x1
∂f m
∂f
.... m
∂x2
∂xn
×
x1 − x10
x 2 − x20
....
xn − xn0
=
x
t
t2
....
tn
15
Giuseppe Manzino – Topografia
© Calderini, RCS Libri Education
Ritroviamo ancora la solita formulazione matriciale l + A x = T
Si vede qui che le incognite non sono più le grandezze ma le correzioni da dare ai valori approssimati
delle grandezze e, partendo da un valore approssimato delle incognite la soluzione può richiedere più
iterazioni.
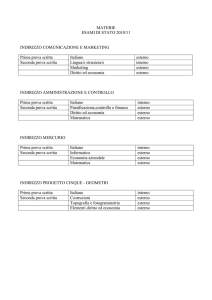
Esercizio: Intersezione all’indietro ampliata
Note le coordinate dei seguenti punti:
1 =(72,65;1113,33) m;
2 =(800,42;1151,64) m;
3 =(2075,75;934,62)m;
4 =(2195,74;284.86) m
Sono incognite le coordinate di un punto P da cui si osservano i tre punti noti sotto gli angoli
)
)
)
a1= 1P 2 = 44g,434; a2= 2 P3 =63g,083
a3= 3P 4 =27g,993
Nella figura sottostante si è indicata in linea tratteggiata la direzione del Nord.
Risolvendo graficamente l’esercizio si ricava una posizione approssimata di P cioè P =(723; 197) m
Gli angoli e, ricavabili in via approssimata dalle coordinate approssimate di P sono legati agli angoli α
misurati dalle relazioni:
ε1 + ε2 = α1
ε3 − ε1 = α2
ε4 − ε3 = α3
Le equazioni generali sulle misure angolari dovrebbero essere così fatte:
ϑP 2 − ϑP1 = α1
ϑP 3 − ϑP 2 = α 2
ϑP 4 − ϑP 3 = α 3
ϑP1 = arctan
X1 − X P
+ 2π ;
Y1 − YP
ϑP 2 = arctan
X2 − XP
;
Y2 − YP
ϑP 3 = arctan
X3 − X P
;
Y3 − YP
dove gli azimuth vengono calcolati con le formule:
in funzione del quadrante in cui ci si trova si lascia l’angolo
inalterato oppure si somma l’angolo piatto o l’angolo giro
X4 − XP
;
Y4 − YP
Tuttavia qui di seguito, per comodità, si è cercato di formare gli angoli α come somma o differenza di
angoli ε senza aggiungere o sottrarre angoli giri o piatti.
Nella derivazione le formule sono le medesime o cambia il segno di una derivata mentre nei termini
noti, usando le prime generali equazioni ci si troverà da aggiungere o sottrarre l’angolo piatto o
l’angolo giro.
ϑP 4 = arctan
16
Giuseppe Manzino – Topografia
© Calderini, RCS Libri Education
arctan
X2 − XP
X − X1
+ arctan P
= α1
Y2 − YP
Y1 − YP
arctan
X3 − X P
X − XP
− arctan 2
= α2
Y3 − YP
Y2 − YP
X − XP
X4 − XP
− arctan 3
= α3
Y4 − YP
Y3 − YP
Linearizzando le equazioni e passando alle derivate si ottiene
⎡⎛
⎞ ΔX P ⎤ 0 ⎡⎛
⎞ ΔX P ⎤ ⎡ X 2 − X P
⎤
−1
1
1
ε10 + ⎢⎜
×
×
×
× ΔYP +
⎥ + ε 2 + ⎢⎜
⎥ + ⎢
2 0 ⎟
2 0 ⎟
2
2 0 ⎥
⎣⎝ 1 + tan ε1 ⎠ Y2 − YP ⎦
⎣⎝ 1 + tan ε 2 ⎠ Y1 − YP ⎦ ⎣ (Y2 − YP ) 1 + tan ε1 ⎦
arctan
⎡ X − X 1
⎤
1
+ ⎢ P
×
× ΔYP = α1
2
2 0 ⎥
⎣ (Y1 − YP ) 1 + tan ε 2 ⎦
⎡⎛
⎛
⎞ ΔX P
⎞ ΔX P ⎤ ⎡ X 3 − X P
⎤
−1
1
1
ε 30 + ⎜
×
− ε 30 − ⎢⎜
×
×
× ΔYP +
⎥ + ⎢
2 0 ⎟
2 0 ⎟
2
2 0 ⎥
⎝ 1 + tan ε 3 ⎠ Y3 − YP
⎣⎢⎝ 1 + tan ε 3 ⎠ Y3 − YP ⎦⎥ ⎣ (Y3 − YP ) 1 + tan ε 3 ⎦
⎡ X − X P
⎤
1
− ⎢ 2
×
× ΔYP = α 2
2
2 0 ⎥
⎣ (Y2 − YP ) 1 + tan ε1 ⎦
⎡⎛
⎞ ΔX P ⎤ ⎡ X 4 − X P
⎛
⎞ ΔX P
⎤
−1
1
1
ε 40 + ⎜
×
− ε 30 − ⎢⎜
×
×
× ΔYP +
⎥ + ⎢
2 0 ⎟
2 0 ⎟
2
2 0 ⎥
⎢⎣⎝ 1 + tan ε 3 ⎠ Y3 − YP ⎥⎦ ⎣ (Y4 − YP ) 1 + tan ε 4 ⎦
⎝ 1 + tan ε 4 ⎠ Y4 − YP
⎡ X − X P
⎤
1
− ⎢ 3
×
× ΔYP = α 3
2
2 0 ⎥
⎣ (Y3 − YP ) 1 + tan ε 3 ⎦
Con le coordinate approssimate di P si calcolano:
X − XP
ε10 = arctan 2
= 5g ,1116
Y2 − YP
ε 30 = arctan
X3 − X P
= 68g , 2192
Y3 − YP
X4 − XP
= 96 g , 2066
Y4 − YP
Passando ai valori numerici
(6,96566 ×10− 4 − 1, 08417928 ×10− 3 )ΔX P + (8, 43966 ×10− 5 + 5,150815 ×10− 4 )ΔYP = −0 g , 0116
ε 40 = arctan
(−3,107101 + 1, 08417928 ×10− 3 )ΔX P + (5, 6981781×10− 4 − 8, 43966 ×10− 5 )ΔYP = 0 g , 0154
(−4, 0367 ×10−5 + 3,107101×10− 4 )ΔX P + (6, 76596 ×10− 4 − 5, 6981781×10− 4 )ΔYP = 0 g , 0056
Al secondo membro occorre trasformare gli angoli da centesimali a radianti, poi si moltiplica primo e
secondo membro per 104 e si ottiene il sistema:
( −3,87613 × ΔX P ) + (5,99478 × ΔYP ) = −1,82212
( 7, 29961× ΔX P ) + ( 4,854212 × ΔYP ) = 2, 41903
( 2, 702431× ΔX P ) + (1,167782 × ΔYP ) = 0,87965
17
Giuseppe Manzino – Topografia
© Calderini, RCS Libri Education
La soluzione classica è data da:
X = ( AT A)−1 × AT (T − l )
−3,87613 5,99478
A = 7, 29961
4,85421 ; ( AT A)−1 =
0, 013938
-0, 003516
; AT (T − l ) =
27, 0988
-0, 003516 0, 017317
1,84646
2, 70243 1,16778
Si ottiene per x la soluzione
ΔX
0,371
X=
=
m
ΔY −0, 063
che fornisce i valori delle nuove coordinate del punto P
P = (723,37; 196,94) m
Per ottenere una precisione centimetrica sarebbe necessario un nuovo ricalcolo a partire da queste
coordinate più precise.
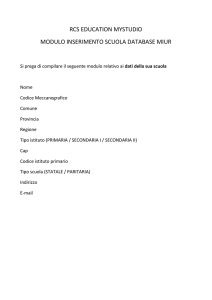
Esercizio: Intersezione in avanti con misure sovrabbondanti
Note le coordinate dei punti
Nel triangolo ABC si sono misurati i seguenti
elementi:
AC = 468, 20 m ± 4 cm
AB = 361,40 m ± 3 cm
α = 61g,7240 ± 50cc
β = 84g,4040 ± 50cc
Inserendo tale triangolo in un sistema cartesiano
ortogonale con origine in A ed asse delle ascisse
lungo AB, si calcoli la posizione corretta di C e la
dimensione dell’ellisse d’errore.
Le coordinate approssimate di C si possono calcolare con:
X C = AC × sen qAC =
con
qAC = 100g − α = 38g, 2860
si ottiene:
YC = AC × cos qAC =
X 0C = 264,84 m
Y 0C = 386, 09 m
dove l’indice zero significa di prima approssimazione.
Le equazioni sulle misure riguardano i due lati e i due angoli:
⎧ π
⎛ X C − X A ⎞
r
⎪ − arctan ⎜
⎟ − α = 0
⎝ YC − YA ⎠
⎪ 2
⎪
⎪ π + arctan ⎛ X C − X B ⎞ − β r = 0
⎜
⎟
⎨ 2
⎝ YC − YB ⎠
⎪
⎪ X − AB = 0
⎪ B
⎪ X 2 + Y 2 − AC = 0
C
C
⎩
Introducendo per le incognite XC , YC , XB i valori approssimati e sapendo che XA = YA = YB = 0 ,
derivando si ottiene:
18
Giuseppe Manzino – Topografia
© Calderini, RCS Libri Education
⎧
⎛
⎞
⎛
⎞
⎪
⎜
⎟
⎜
⎟
⎛ X C0 ⎞
− X C0 ⎟
⎪ π
1
1 ⎟
1
⎜
⎜
r
× 0 ⎟ × ΔX C + ⎜
×
× ΔYC = 0
2
2
2 ⎟
⎪ 2 − arctan ⎜ Y 0 ⎟ − α + ⎜
0
0
0
YC
⎛
⎞
⎛
⎞
⎝ C ⎠
Y
X
X
⎪
C
C
C
⎜ 1 +
⎟
⎜ 1 +
⎟
⎜ ⎜ Y 0 ⎟
⎟
⎜ ⎜ Y 0 ⎟
⎟
⎪
⎝ ⎝ C ⎠
⎠
⎝ ⎝ C ⎠
⎠
⎪
⎪
⎛
⎞
⎛
⎪
⎜
⎟
⎜
− X C0 − X B0
⎛ X C0 − X B0 ⎞
⎪ π
1
1
1
⎜
⎟
⎜
r
× 0 ⎟ × ΔX C + ⎜
×
⎟ − β + ⎜
⎪ + arctan ⎜
2
2
2
0
0
0
0
0
2
Y
Y
⎛
⎞
⎛
⎞
C
C
⎝
⎠
YC0
X
−
X
X
−
X
⎪
C
B
C
B
⎜ 1 +
⎟
⎜ 1 +
⎪
⎜ ⎜ Y 0 ⎟
⎟
⎜ ⎜ Y 0 ⎟
C
C
⎠
⎠
⎝ ⎝
⎠
⎝ ⎝
⎪
⎪ ⎛
⎞
⎨ ⎜
⎟
⎪ ⎜
1
−1 ⎟
× 0 ⎟ × ΔX B = 0
⎪+ ⎜
2
⎪ ⎜ ⎛ X C0 − X B0 ⎞ YC ⎟
⎟
⎪ ⎜ 1 + ⎜
0
⎟
⎠
⎠
⎪ ⎝ ⎝ YC
⎪
⎪
⎪ X B0 − AB + ΔX B = 0
⎪
⎪
⎪
⎛ X 0
⎞ ⎛ Y 0
⎞
⎪ AC − 468, 2 + ⎜ C × ΔX C ⎟ + ⎜ C × ΔYC ⎟ = 0
⎪
⎝ AC
⎠ ⎝ AC
⎠
⎪
⎩
Cioè:
⎧ π
⎛ X C0 ⎞
⎛ YC0
⎞ ⎛ − X C0
⎞
r
−
arctan
−
α
+
×
Δ
X
× ΔYC ⎟ = 0
⎪
⎜ 0 ⎟
⎜
C ⎟ + ⎜
2
2
⎝ AC
⎠ ⎝ AC
⎠
⎝ YC ⎠
⎪ 2
⎪
0
0
⎤ ⎛ −Y 0
⎛ X C0 − X B0 ⎞
⎛ YC0
⎞ ⎡ − ( X C − X B )
⎞
⎪ π
r
C
⎢
⎥
+
arctan
−
β
+
×
Δ
X
+
×
Δ
Y
× ΔX B ⎟ = 0
⎜
⎟
⎜
⎟
C
C + ⎜
2
2
2
0
⎪ 2
⎥⎦ ⎝ BC
BC
⎝ BC
⎠ ⎢⎣
⎠
⎝ YC
⎠
⎪⎪
⎨
⎪ 0
⎪ X B − AB + ΔX B = 0
⎪
⎪
⎪
⎛ X 0
⎞ ⎛ Y 0
⎞
⎪ AC − 468, 2 + ⎜ C × ΔX C ⎟ + ⎜ C × ΔYC ⎟ = 0
⎪⎩
⎝ AC
⎠ ⎝ AC
⎠
( )
(
)
( )
⎞
⎟
⎟
⎟ × ΔYC
⎟
⎟
⎠
Sostituendo i valori si ottiene:
⎧0r , 000001182 + 0, 001761313 × ΔX C − 0, 001208201 × ΔYC = 0
⎪ r
⎪− 0 , 00008868 + 0, 002437601× ΔX C + 0, 000609637 × ΔYC − 0, 002437601× ΔX B = 0
⎨
⎪ΔX B = 0
⎪0,565667784 × ΔX + 0,824643841× ΔY = 0
C
C
⎩
19
Giuseppe Manzino – Topografia
© Calderini, RCS Libri Education
La matrice coi pesi delle grandezze misurate a, b, AB, AC, è una matrice diagonale:
σ 02
π ⎞
⎛
⎜ 0,005
⎟
200 ⎠
⎝
0
P=
0
2
σ 02
π ⎞
⎛
⎜ 0,005
⎟
200 ⎠
⎝
0
0
0
0
2593,8
0
0
0
0
2593,8
0
0
P=
0
0
1,778 0
0
0
0
1
2
0
0
0
0
σ 02
0
0,032
prendendo per s20 il valore 1,6 10-3 si ha:
σ 02
0
0,042
2,594 × 105
P=
0
0
0
2,594 × 10
0
0
0
0,001761313 − 0,001208201
0
0,002437601 0,000609637 − 0,002437601
A=
0
0
1
0,565667784 0,824643841
0
0
5
0
0
0
1,778 0
0
1
− 0,000001182
0,000088680
T=
0
0
Risolvendo le incognite:
ΔX C
0,016
X = ( AT PA) −1 × ( AT P T ) = ΔYC = − 0,011 m
ΔX B
0,000
Per cui le coordinate del punto C diventano C = ( 264,856; 386,079).
Occorrerebbe provare una seconda iterazione per essere sicuri che gli scarti siano piccoli.
Volendo conoscere le dimensioni dell’ellisse d’errore si calcolerà prima il σ 0 con:
vT P v
σ0 =
m−n
con m numero di equazioni ed n numero di incognite
e di seguito la matrice di varianza covarianza
σ 0 = 4,39407×10-5
C =σ 0 × ( AT PA)−1 ⋅
20
Giuseppe Manzino – Topografia
© Calderini, RCS Libri Education
C=
1,58E−03
−1,07E−03
1,13E−05
−1,07E−03
7,91E−04
−7,50E−06
1,13E−05
−7,50E−06
2,46E−05
Le dimensioni delle ellissi di errore sono le radici quadrate dei termini diagonali
s X C = ± 0,0397 m ; sYC = ± 0,0281 m ; s X B = ± 0,0050 m
la matrice C di varianza e covarianza è semplificatamente fatta in questi termini:
σ xx2 σ xy
le dimensioni dei semiassi minore e maggiore che indicheremo con sa e sb si
C=
σ xy σ yy2
calcolano con
σ
2
a ,b
⎛ σ xx2 + σ yy2 ⎞ 1
= ⎜
⎟ ±
2
⎝
⎠ 2
(σ
2
xx
2
− σ yy2 ) + 4σ xy2
L’inclinazione q del semiasse maggiore dell’ellisse rispetto all’asse X si calcola con la formula:
tan 2ϑ =
2σ xy
σ xx2 − σ yy2
Introducendo i valori nelle due precedenti equazioni si ricava:
sa = 0,0482 m = semiasse maggiore
sb = 0,0066 m = semiasse minore
2q = −77,5879 ;
q = −38g,7939
Esercizio: rototraslazone ai minimi quadrati
Si vogliano determinare le tre incognite di una rototraslazione piana conoscendo le coordinate di tre
punti nei due sistemi di coordinate XY ed xy:
PUNTO
A
B
C
X
743,16
927,07
1238,79
Y
805,10
1007,59
786,41
x
213,44
465,19
655,83
y
405,54
512,56
181,28
L’equazione della rototraslazione
⎛ X ⎞
⎛ x ⎞ ⎛ X 0 ⎞
⎜ ⎟ = R ⎜ ⎟ + ⎜ ⎟
⎝ Y ⎠
⎝ y ⎠ ⎝ Y0 ⎠
La esplicitiamo così
X = x cos α − y senα + X 0
Y = x senα + y cosα + Y0
Ponendo sen α = b e cos α = a si ottiene:
21
Giuseppe Manzino – Topografia
© Calderini, RCS Libri Education
X = ax − by + X 0
Y = bx + ay + Y0
La matrice delle incognite A, (matrice disegno), ha questa forma:
⎛ x1
⎜ y
⎜ 1
A = ⎜ ...
⎜
⎜ x3
⎜ y
⎝ 3
− y1
1
x1
...
0
...
0 ⎞
⎛ X 1 ⎞
⎟
⎜ Y ⎟
1 ⎟
⎜ 1 ⎟
.. ⎟ e T= ⎜ ... ⎟
⎟
⎜ ⎟
0 ⎟
⎜ X 3 ⎟
⎜ Y ⎟
1 ⎟⎠
⎝ 3 ⎠
Si può scrivere ancora
− y3 1
x3 0
⎛ a ⎞
⎜ b ⎟
⎟ il termine AT A assume la forma
Con X = ⎜
⎜ X 0 ⎟
⎜ ⎟
⎝ Y0 ⎠
(− x1 y1 + x1 y1 +
⎛ 2
2
2
⎜ ( x1 + x2 + x3 +
− x2 y2 + x2 y2 +
x1 + x2 + x3
⎜ y 2 + y 2 + y 2 )
2
3
⎜ 1
− x3 y3 + x3 y3 )
⎜
(− x1 y1 + x1 y1 +
2
2
2
AT A = ⎜
(
x
+
x
+
x
+
1
2
3
⎜ − x y + x y +
− y1 − y2 − y3
2 2
2 2
⎜
y12 + y2 2 + y32 )
⎜ − x3 y3 + x3 y3 )
⎜ x + x + x
− y1 − y2 − y3
1+1+1
1
2
3
⎜
⎜ y + y + y
x1 + x2 + x3
0
⎝
1
2
3
Si riconoscono nei termini le seguenti formule ricorsive:
⎛ n ( x ) 2 + ( y ) 2
i
i
⎜ ∑
i =1
⎜
⎜
0
⎜
T
A A = ⎜
n
xi
⎜
∑
i =1
⎜
n
⎜
yi
⎜
∑
⎝
i =1
n
0
∑x
i =1
n
∑ ( xi ) 2 + ( yi ) 2
i =1
n
−∑ yi
n
−∑ yi
i =1
n
i =1
n
∑x
i =1
i
i
0
AX=T
⎞
⎟
y1 + y2 + y3 ⎟
⎟
⎟
⎟
x1 + x2 + x3 ⎟
⎟
⎟
⎟
0
⎟
1 + 1 + 1 ⎟⎠
n
∑ y ⎞⎟
i =1
i
⎟
⎟
x
∑
i
i =1
⎟
⎟
0 ⎟
⎟
n ⎟⎟
⎠
n
con n pari al numero di punti
Si riconoscono nelle sommatorie delle x e delle y n volte le coordinate baricentriche nel sistema x,y.
il termine AT T assume la forma
22
Giuseppe Manzino – Topografia
© Calderini, RCS Libri Education
⎛ x1 X 1 + x2 X 2 + x3 X 3 + y1Y1 + y2Y2 + y3Y3 ⎞
⎜ x Y + x Y + x Y − ( y X + y X + y X ) ⎟
1 1
2
2
3
3 ⎟
T
che, in forma ricorsiva, si può scrivere:
A T = ⎜ 1 1 2 2 3 3
⎜
⎟
X1 + X 2 + X 3
⎜
⎟
Y1 + Y2 + Y3
⎝
⎠
3
3
⎛ X x + y Y ⎞
∑
i i
i i ⎟
⎜ ∑
i =1
i =1
⎜ 3
⎟
3
⎜ ∑ xiYi − ∑ yi X i ⎟
i =1
i =1
⎟
AT T = ⎜⎜
3
⎟
Xi
⎜
⎟
∑
i =1
⎜
⎟
3
⎜
⎟
Yi
⎜
⎟
∑
⎝
i =1
⎠
Si riconoscono nelle sommatorie delle X e delle Y (n volte) le coordinate baricentriche nel sistema X,Y.
Viene perciò spontanea l’idea di annullare alcuni termini sia della matrice ATA che della matrice AT T
utilizzando anziché le coordinate di partenza, le coordinate baricentriche in entrambi i sistemi e
ricordandosi poi alla fine di sommare alle Xo Yo ottenute quelle del baricentro.
Ne abbiamo il vantaggio notevole di ottenere una matrice diagonale che è facilmente invertibile
attraverso il reciproco degli elementi diagonali.
PUNTO
A
B
C
G (baric.)
Xg
−226,51
−42,60
269,12
969,67
Yg
−61,27
141,22
−79,96
866,37
xg
−231,38
20,37
211,01
444,82
yg
39,08
146,10
−185,18
366,46
0
0 0 ⎞
⎛155640.95
⎛141373.94 ⎞
⎜
⎟
⎜ 65092.46 ⎟
0
155640.95 0 0 ⎟
⎟
AT A = ⎜
AT T = ⎜
⎜
⎜
⎟
0
0
3 0 ⎟
0
⎜
⎟
⎜
⎟
0
0
0 3 ⎠
0
⎝
⎝
⎠
Il vettore soluzioni X vale
⎛ 141373.94 ⎞
⎛ a ⎞ ⎜ 155640.95 ⎟ ⎛ 0,908333829 ⎞
⎟ ⎜
⎜ b ⎟ ⎜
65092.46
0,418221940 ⎟⎟
⎜
⎟
⎜
⎟
⎜
X=
=
=
⎜ X 0G ⎟ ⎜ 155640.95 ⎟ ⎜
⎟
0
⎟
⎜ G ⎟ ⎜
⎜
⎟
0
0
⎟ ⎝
⎠
⎝ Y0 ⎠ ⎜
⎜
⎟
0
⎝
⎠
tan α =
b
a
⇒
α = 27 g ,4696
Applicando la rototraslazione al punto baricentrico
XG=444,82 m e YG= 366,46 m
23
Giuseppe Manzino – Topografia
© Calderini, RCS Libri Education
969,67 = ( 444,82 × cos 27 g ,4696 ) − ( 366,46 × sen27 g ,4696 ) + X 0
866,37 = ( 444,82 × sen27 g ,4696 ) + ( 366,46 × cos 27 g ,4696 ) + Y0
Si ricavano X0= 718,890 m e Y0= 347.463 m
Le due incognite a e b che abbiamo ipotizzato in partenza indipendenti in realtà non lo sono perché
a2 + b2 = cos2 a + sen 2a = 1. La somma a2 + b2 nell’esercizio vale 0,99998, cioè mancano a 20 parti
per milione ad 1.
Questo è il fattore di scala teorico migliore, ma visto che il fattore di scala e la rotazione sono
incorrelati, l’esercizio svolto tiene come imposto un fattore di scala =1 e calcola l’unica incognita (dato
che la traslazione coincide col baricentro) che è la rotazione.
Si calcolano ora gli scarti
X − x cos α − y senα = vx
Y − x senα + y cosα = vx
Scarti (m)
0,00439476922
0,00050643988
− 0,00053466273
− 0,00675333470
0,00613989351
− 0,00375310518
∑ν
2
i
=
(Scarti)2
1,93 × 10-5
2,56 × 10-7
2,86 × 10-7
4,56 × 10-5
3,70 × 10-5
1,408 ×10-5
1,1724 × 10-4
(m−n)=6−1=5
σ 2 = ∑ν i2 / (m − n) =
σ α2 =
σ
n11
2,9312 × 10-5
1,88331 × 10-10
Elemento diagonale della matrice normale =
n11 =155640,5
σ α = ± 1,37234 × 10-5 rad σ α = ± 0,00087 gon
Il problema è così concluso e non occorrono altre iterazioni perché il sistema di equazioni è lineare
nelle incognite a e b.
24
Giuseppe Manzino – Topografia
© Calderini, RCS Libri Education