Urti
QdMà2° principio
Mancanza di informazioni nel caso di urti
Quantità di moto
Leggi di conservazione QdM x sistemi isolati
2° principio dinamica generalizzato
Impulso (urti ó sistemi sempre isolati!)
Urti unidimensionali
Urti nello spazio
QdM - Urti
1
Introduzione
• Processi di urto
o Interazione tra due corpi
o Interazione quasi istantanea
• Variazione finita velocità in tempo piccolissimo è grande accelerazione
• èForze molto grandi
o Forze non definibili
• Tempo brevissimo
• Numero infinito di interazioni microscopiche
• Trattazione urti
o Forze non costanti e non note
o Nuova grandezza: Quantità di Moto à Principio di conservazione
o Comprensione moto tramite solo stati iniziale e finale
• Analogia con trattazione energetica:
o Forze non costanti à Difficoltà trattazione
o Nuova grandezza: Energia à Principio conservazione
o Comprensione moto tramite solo stati iniziale e finale
QdM - Urti
2
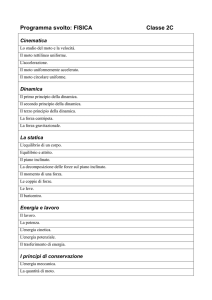
Urti
Dinamica del punto materiale
Forze non costanti
Difficili è“non note”
ignote
Nuove variabili
Lavoro !Forze
Nuove variabili
Quantità moto ! Forze
Riformulazione e
semplificazione
Riformulazione e
semplificazione
T.Lavoro ed Energia
Teoria Urti
Conservazione
Energia
POSTULATO
QdM - Urti
Forze impulsive
non costanti
Stati iniziale e
finale
Conservazione
Q.d.M
RICAVATA
Stati iniziale e
finale
3
Quantità di moto
• Astronauta
o fermo nello spazio lancia martello in avanti con velocità Vmart.
o 3º principio è Forza uguale e contraria su astronauta è si muove all’indietro
o Vastr?
• Mancanza di informazioni su forze e su tempo
• Leggi Newton valide
anche se forze non note
o Ipotesi
• 2 corpi qualunque (m1 , v1 – m2 , v2)
• Sistema isolato ó no forze esterne
(ipotesi QUASI sempre valida!)
• QdM
P = mv
• Conservazione QdM!isolati
o Sia 1! Particella che molte particelle
QdM - Urti
III°
⇒
II°
⇒
dv
a=
dt
⇒
⇒
⇒
F2→1 + F1→2 = 0
m1a1 + m2 a2 = 0
dv1
dv2
m1
+ m2
=0
dt
dt
d ( m1v1 ) d ( m2 v2 )
+
=0
dt
dt
d ( m1v1 + m2 v2 )
= 0 ⇔ ∑mjvj = k
dt
j
4
Conservazione
Quantità di moto (S.isolati)
• Sistemi isolati
Conservazione quantità di moto
∑m v
j
j
= cost
j
P = mv
P1i + P2i = P1 f + P2 f
#
%
%
%%
Ptot = ∑ Pj = cost ⇔ $
%
j
%
%
%&
∑P
jx
= cost
j
∑P
jy
= cost
j
∑P
jz
= cost
j
⇒ P1xi + P2 xi = P1xf + P2 xf
…
• Conservazione anche su singolo asse
• Indipendente da natura forze
o anche non conservative
• Conoscenza forze non necessaria
solo stato iniziale e finale (come x trattaz. Energetica)
QdM - Urti
5
IIª (Iª) Legge di Newton
generalizzata
• Se m=cost
dv d ( mv ) dp
∑ Fj = ma = m dt = dt = dt
j
dp
∑ Fj = dt
j
• Generalizzazione
o (motori a razzo)
• Contiene la vecchia formulazione
• Sistema isolato è ritrovo Iª Legge di Newton
QdM - Urti
6
Impulso e QdM
Teorema Impulso
• Conservazione QdM ó sistemi isolati
• Serve un nuovo concetto (Impulso)
per dimostrare che negli urti tutti i sistemi sono isolati
• dtàDt
!!!!
• Generico sistema NON isolato
o 1! Particella
o Sistema multi-particelle
• Solo Fest
Fint è Dpint=0 sempre!
dP
∑ Fj,est = dt
j
# &
⇒ dP = %% ∑ Fj,est (( dt
$ j
'
integrando ⇒ ΔP = Pf − Pi =
∫
tf
ti
# &
%% ∑ Fj,est (( dt = I
$ j
'
• Teorema Impulso su Dt ó Equivalente 2ª Legge di Newton istant
• Teorema Impulso ó Analogo conservazione Energia
o Interazione con ambiente è variazione di Energia
o Interazione con ambiente è variazione di impulso o QdM
QdM - Urti
7
Forze impulsive
•
•
•
•
Applico di nuovo ad 1! Particella è tutte forze “esterne”
Alcune forze agiscono per Dt"0, altre per tempi finiti
La maggior parte delle forze sono definite e “finite”
Considero Dt(à0)
Considero DP(Dt) finito (misurabile sperimentalmente)
I=
• Forze impulsive
QdM - Urti
" %
∫ ti $$∑ Fj '' dt = ∑ Fj,media ⋅ Δt = ΔP
# j &
j
1
3
Fk → ∞
⇒ ∃Fk : 2
34 Fk >> Fj , ∀j ≠ k
tf
8
Urti
• Torniamo ad un sistema di (2) particelle
• Processo d’urto
Interazione tra due corpi
Interazione quasi istantanea
Variazione finita velocità in tempo piccolissimo è grande accelerazione
èForze molto grandi
Forze non definibili
• Tempo brevissimo
• Numero infinito di interazioni microscopiche
o Forza impulsiva interna (per risultati su 1! Particella)
o # Tutte forze esterne trascurabili # Sistema isolato
o
o
o
o
o
• è Approssimazione d’impulso
• è Conservazione QdM
P1i + P2i = P1 f + P2 f
• ~Conservazione Energia
Interessa solo stato iniziale e finale
QdM - Urti
" P +P =P +P
2 xf
$$ 1xi 2 xi 1xf
⇒ #
$
$%
9
v1
m1
m2
b
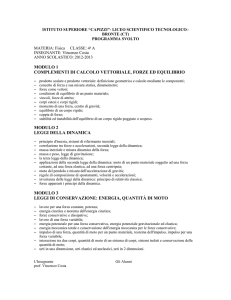
Modelli
d’urto
v1
m1
x
m2
• Bidimensionali (urti radenti)
•
Unidimensionali (urti centrali)
• Vale sempre Conservazione QdM
• Urti anelastici
•
o Non conservazione Energia Cinetica ß deformazione per urto
o Urto perfettamente anelastico ß max deformazione - corpi uniti
• Max conversione EK in deformazione ed energia interna
" x : m v + m v = (m + m )v
1 ix1
2 ix 2
1
2
xf
$$
urto centrale
m1vi1 + m2 vi2 = (m1 + m2 )v f
y : 0 = (m1 + m2 )vyf
#
(⇒
unidimens)
$
Urti elastici
z : 0 = (m1 + m2 )vzf
$%
o Conservazione Energia Cinetica
(Potenziale non varia: ∆tà0 è posizione non cambia)
"
$ CQdM : m1vi1 + m2 vi2 = m1v f 1 + m2 v f 2
$
#
$
1
1
1
1
2
2
2
2
QdM - Urti$ CE : m1v i1 + m2 v i2 = m1v f 1 + m2 v f 2
2
2
2
2
%
Urto centrale
⇒ unidim
⇒ x : m1vix1 + m2 vix 2 = m1vxf 2 + m2 vxf 2
10
Esempi
Veicolo adi80Km/h
• Rimbalzo
una palla sul pavimento?!?!?
-1s è
o Non conservazione quantità
di moto
a massa
Deformazione
lamiere
èper
10sistemi
25g infinita
(»6g!)
Non sono isolati!! Vincolo al vincolo per
impedirgli di muoversi
-2sè
Urto
contro
volante
è
10
250g
• Corpo che sale in un rampa con un angolo secco
-1s cambiamento
è massa
infinita: unico
effetto
Cintura
di rampa
sicurezza
è 10
è 25g direzione velocità
• Esempi
di tutti i giorni è >10-1s è 15g
Cinturanella
convita
pretensionatore
o Cellulare
Airbag
è doppio
effe\o o Ammortizzatori
treno
o Macchine con sicurezza passiva
o Airbag
o Ammortizzatore imbracatura da scalata
QdM - Urti
11
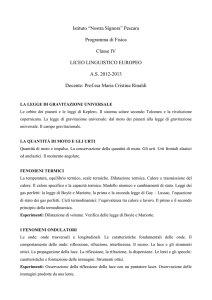
Compito 24.09.2010
! • Una$ parete viene
% ! con una1fune, %con un
1
attrezzata
ΔE
=
T
2
2
i t + at
j
# y(t)
#
#
#
=
y
+
v
y(t)
=
gt
0 ancorato in (A) al muro e trattenuta
& i0 fisso
estremo
2in (C), #
## al muro
##
& anchej2con un##moschettone
#
C.E.
⇒
%
v(t)
= v0+H+ΔE
" all’altezza
m.at )+…&
(ΔE
=⇒
LM"+…v(t) = gt &
K
P
# complessiva
# • La corda
# a(t) =L. g #
&a(t)
ha
un’altezza
=
a
0ΔEi
Tj
# • All’estremo
#della∑#corda
∑superiore
(posizione#B),
&'
i
#$ completamente
#' verticalmente,
#$j
#'
distesa
viene
∑
∑
un peso M.
2K )+[(U
2
(K⇒f −vattaccato
−UGi )+ −(UyEf )−U Ei )] = 0
i = v Gf
(t)
+
2g(y(t)
verticalmente,
0
0
• Il peso viene
lasciato cadere
0?
0?
0? la quota del moschettone,
raggiunge
prosegue la
m la corda non si2 blocca.
sua caduta finché
ex : v fin ≅ 2 *10
* 9m ≅mg
13.4m
/ sg≅2 +50km
/ h )= 13.8m / s
2
±
(m
2kmgH
1
• A questo punto
entra
in
gioco
l’elasticità
della
2
s ⇒d=
−mg(H
+
d)+
kd
= +2.2m
corda (Ke) che continua ad allungarsi di un tratto
2 *14m / s
k
mv 70kg
⇒ F d.=
=
= 93KN ⇒ 136g
Calcolare
…?0.01s
⇒• Fmax
=Δtkd ~ 7KN
⇒ amax ~ 10g
• …cosa succederebbe se la corda non fosse
elastica?
• …l’intensità massima della forza applicata alla
corda nel momento di massima elongazione.
0
QdM - Urti
12
Corpi estesi
Sistemi punti materiali
• Corpi estesi ó sistemi di punti materiali
o ~Urti: sistema di ≥2 punti materiali
o Sistemi rigidi (solido)
o Sistemi non rigidi (fluido)
• Studio del moto (cinematica-dinamica)
∞3 variabili
• Nuove variabili per descrivere
Modelli
o Comportamente complessivo (medio) del sistema (C.d.M.)
e/o
o Moto esatto di ogni singolo punto del sistema (C.d.M.; Angolo rotazione)
Corpo rigido
Moto traslatorio puro
Sistemi rigidi (mutue
distanze non cambiano)
Moto rotatorio puro
Sistemi non rigidi
13
Centro di massa
• Moto complessivo di un sistema di
particelle visto come moto di un
punto particolare detto
Centro di massa
o Media PESATA delle posizioni delle particelle del
sistema = “posizione media della massa del sistema”
• Unidimensionale è scalari
• Tridimensionale è vettori
• Massa continua: Processo di limite
• Moto di un sistema di particelle
o Rcm: Prendiamo il centro di massa come se fosse un
punto vero di posizione data
o Vcm = media pesata Vi è QdMcm = somma delle
QdMi ovvero si comporta come se…
o Acm = media pesata Ai è ovvero si comporta
come se…
o Kcm = Ktot è ovvero…
Corpo rigido
xCM
∑ mi xi
m1 x1 + m2 x2
=
= i
m1 + m2
M tot
rCM
∑ mi ri
m r + m2 r2
= 11
= i
m1 + m2
M tot
∑ Δm x
i i
xCM = lim
Δm→0
i
M tot
=
1
M tot
∫
M
x dm
drCM
1
dri
1
vCM =
=
mi
=
∑
dt
M tot i
dt M tot
PCM = ∑ pi = ∑ mi vi = MvCM
i
i
x def
∑m v
i i
i
dvCM
1
dvi
1
aCM =
=
mi
=
mi ai
∑
∑
dt
M tot i
dt M tot i
MaCM = ∑ mi ai = ∑ Fi = ∑ Fint + ∑ Fest
i
i
int
est
=0
dpCM
∑ Fest = MaCM = dt
est
14