GNGTS 2016
Sessione 3.3
Rilievo GPR in area urbana di interesse archeologico.
Applicazione della SVD (Singular Value Decomposition)
alle time-slices per migliorarne la risoluzione
T. A.M. Quarta, S. Negri
Dipartimento di Scienze e Tecnologie Biologiche e Ambientali (DISTeBA), Università del Salento
Il GPR è un metodo di indagine geofisica non invasivo, ad alta risoluzione, particolarmente
adatto per la individuazione di strutture sepolte nel sottosuolo. Per tali motivi è stato adoperato
con successo in aree di interesse archeologico (Basile et al., 2000; Conyers e Goodman, 1997).
La risoluzione e la profondità di indagine dipendono dalla frequenza dell’antenna radar e dal
valore dei parametri elettromagnetici dei materiali in cui si propaga il segnale radar. Affinché
gli oggetti di interesse possano essere individuati è necessario che essi abbiano un sufficiente
contrasto dei parametri elettromagnetici, rispetto al materiale inglobante, in modo da generare
riflessioni significative. L’elevata densità di dati acquisiti dal GPR lungo il profilo consente
generalmente di localizzare le anomalie generate da corpi sepolti senza effettuare complesse
elaborazioni come nel caso di dati sismici, gravimetrici, ecc. In ambito archeologico i rilievi
radar coprono aree molto vaste e spesso vengono acquisiti centinaia di profili. È necessario
quindi sintetizzare le informazioni contenute nei singolo profili sotto forma di time-slices (2D)
o cubi (3D) (Nuzzo et al., 2002; Nuzzo e Quarta, 2010). Questo ha determinato un crescente
interesse per le tecniche di elaborazione delle immagini allo scopo di esaltare la visualizzazione
degli oggetti di interesse.
In questo lavoro la tecnica SVD è stata utilizzata per filtrare le immagini relative alle timeslices allo scopo di delineare meglio alcuni oggetti di interesse.
Un rilievo GPR è stato eseguito nel 2012 in Piazza Tito Schipa (LE), un’area di circa
10000 m2 adibita a parcheggio. In questa area, nel 1400 era sorto un convento francescano
successivamente adibito a caserma militare. La struttura, rimaneggiata per adattarsi alla nuova
destinazione venne definitivamente distrutta nel 1971 per dare luogo al parcheggio. In seguito
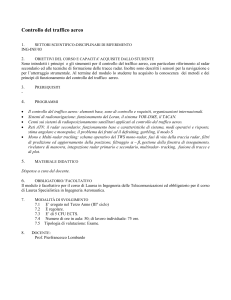
Fig. 1 – Area di indagine con la suddivisione in sub-aree (A, B…H); In ciascuna sub-area sono stati eseguiti profili
paralleli con spaziatura 1 m. A destra immagini dei materiali di riempimento e delle strutture messe in luce dallo
scavo.
616
GNGTS 2016
Sessione 3.3
alla approvazione di un progetto comunale per la realizzazione, in questa area, di un grande
complesso che prevedeva sia strutture in elevato che un parcheggio sotterraneo, è stato eseguito
un primo scavo che aveva messo in luce numerosi muri di fondazione ed altre strutture del
convento. E’ stato quindi richiesto un rilievo GPR per individuare l’estensione di tali rovine al
di sotto del parcheggio.
Il rilievo radar è stato eseguito con un SIR-3000 utilizzando una antenna da 400 MHz montata
su carrello in modo da velocizzare l’acquisizione dati. L’area di indagine è stata suddivisa in
sub-aree (A, B,……H) in Fig. 1 che circondavano lo scavo centrale. In ciascuna sub-area sono
stati eseguiti profili paralleli con spaziatura 1 m.
Dopo avere eseguito profili di prova in diverse zone per calibrare al meglio lo strumento, il
rilievo è stato eseguito adoperando i seguenti parametri di acquisizione:
fondo scala 60 ns, numero di campioni per traccia 512 (16 bit), distanza tra i markers 1m.
I dati sono stati elaborati usando Reflex v5.5. Tutte le sezioni radar sono state sottoposte alle
seguenti elaborazioni: correzione per il time-zero, background removal, stack su 5 tracce
per ottenere una spaziatura di circa 6 cm tra di esse, Kirchhoff migration con una velocità
di 0.07m/ns stimata dalle iperboli di diffrazione presenti sulle sezioni radar. L’identificazione
delle anomalie dovute ai muri di fondazione non è stata agevole in quanto i materiali dei muri
distrutti nella demolizione, sono stati adoperati come materiale di riempimento ( Fig. 1) e spesso
provocavano anomalie caotiche che mascheravano quelle dei muri.
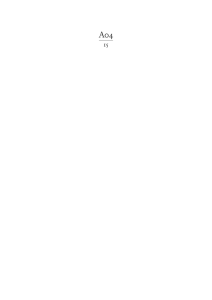
Utilizzando le sezioni radar migrate sono state realizzate time-slices ogni 5 ns nel range (040) ns per tutte le sub-aree. In Fig. 2a è rappresentata la time-slices tra 15 e 20 ns relativa alla
sub-area D in Fig. 1. In essa le anomalie dovute ai muri sono evidenti tra 0-10 m in Y con una
inclinazione di circa 45° rispettagli assi della immagine, la parte in basso a destra mostra alcune
anomalie di grande intensità e non vi è evidenza di muri.
Abbiamo provato ad applicare la SVD alle time- slices realizzando dei filtri che potessero
migliorare la qualità dell’immagine. La tecnica SVD è utilizzata con successo nella elaborazioni
di immagini (Riaz e Ghafoor, 2012; Verdonk et al., 2013).
Fig. 2 – Time-slice tra 15ns e 20 ns relativa alla sub-area D in Fig. 1: a) ottenuta dalle sezioni migrate; b) ottenuta dalla
applicazione della SVD alla immagine a).
L’immagine radar è rappresentata da una matrice X di dimensioni (M x N). La SVD permette
di decomporre X (supponiamo per semplicità che M<N e che il rango di X sia M) in matrici
ortogonali:
dove: S è una matrice diagonale di dimensioni (M x N) con M valori singolari non nulli di X
S = diag (σ1, σ2, σ3 ... σM) con σ1, σ2, σ3 ... σM >0
U matrice unitaria (UUT = UTU = I) di dimensioni (M x M) di autovettori di XXT,
V matrice unitaria (VVT = VTV = I) di dimensioni (N x N) di autovettori di XTX,
Xj matrici (M x N) chiamate autoimmagini.
617
GNGTS 2016
Sessione 3.3
Le matrici XJ sono tra loro ortogonali e la loro somma permette la ricostruzione perfetta di
X. Le autoimmagini relative ai primi autovalori contengono anomalie di grande intensità spesso
associate a disturbi che si desidera attenuare o eliminare, quelle relative agli autovalori più
piccoli contengono rumore ad alta frequenza che rende meno nitida l’immagine. Analizzando
il grafico degli autovalori e le autoimmagini ad essi relative è possibile selezionare il range
di autovalori più opportuno per attenuare o sopprimere i disturbi indesiderati. In Fig. 2b é
visualizzato il risultato della applicazione della SVD alla slice in Fig. 2a ottenuta sommando
le autoimmagini relative al range di autovalori (7-30). In pratica si è realizzato un filtro passabanda che è riuscito ad evidenziare la presenza di muri nella parte in basso a destra, la presenza
di altri particolari nel resto della immagine ed ha soppresso anche alcuni disturbi orizzontali tra
10m e 30 m in Y che si estendevano lungo tutto l’asse X. In conclusione l’ applicazione della
SVD alle time-slices ottenute attraverso un processing standard si è rivelata una tecnica efficace,
che non richiede uno sforzo eccessivo nel selezionare il range opportuno di autoimmagini da
utilizzare per eliminare i disturbi indesiderati ed ottenere una migliore risoluzione.
Bibliografia
Basile V., Carrozzo M.T., Negri S., Nuzzo L., Quarta T. , Villani A.V. ; 2000: A ground penetratingradar survey for
archaeological investigations in an urban area (Lecce, Italy). J. Appl.Geophys., 44, 15-32.
Conyers, L.B., D. Goodman; 1997: Ground-Penetrating Radar – An Introduction for Archaeologists. (AltaMira Press,
A Division of SagePublications, Inc.).
Nuzzo L., Leucci G., Negri S., Carrozzo M. T., Quarta T. 2002: Application of 3D visualization techniques in the
analysis of GPR data for archaeology. Annales of Geophysics, 44, 321-337.
Nuzzo L., Quarta T.; 2010: Near-surface geophysical investigations inside the cloister of the historical palace ‘Palazzo
dei Celestini’ in Lecce, Italy. J. Geophys. Eng. 7, 200-210.
Reflex v5.5 software package (Sandmeier Software, 2010).
Riaz M. M., Ghafoor A.;2012: Information theoretic criterion based clutter reduction for ground penetrating radar.
Progress In Electromagnetic Research B, 45, 147-164.
Verdonck L., Vermeulen F., Docter R., Meyer C., Kniess R.; 2013: 2D and 3D ground penetrating radar surveys
with a modular system: data processing strategies and results from archaeological field tests. Near Surface
Geophysics, 11, 239-252.
618