Introduzione
La copertura globale, la tridimensionalità delle misure e la precisione fanno
del GPS uno strumento estremamente efficace per il calcolo della posizione di
un punto sulla superficie terrestre.
Risulta tuttavia molto complesso pensare ad un utilizzo di tale sistema per la
navigazione nello spazio e lontano dalla Terra, come nel caso di missioni
all’interno del Sistema Solare o al di fuori di esso.
Alcuni studiosi (Coll, 2006; Rovelli, 2002; Blagojevic, 2002; Tartaglia e
Ruggiero, 2007; Bini, 2008), nel corso di questi anni, hanno proposto sistemi
in grado di servirsi delle linee di universo di segnali elettromagnetici
provenienti da corpi celesti, al fine di effettuare un posizionamento
relativistico nello spazio.
E’ risultato immediato, a tale scopo, pensare di utilizzare dei set di pulsar,
stelle di neutroni comparabili a “fari” stellari, come sorgenti di tali segnali
elettromagnetici, data la loro capacità di emettere impulsi a periodi
estremamente regolari.
Nel presente lavoro di tesi verrà presentato dunque un approccio
matematico all’uso di emettitori pulsanti, situati a distanza infinita rispetto
all’osservatore, per definire un sistema di navigazione e di posizionamento
spaziale completamente relativistico.
Verrà mostrato inoltre come le pulsar possono essere utilizzate a tale scopo e
particolare attenzione verrà rivolta all’analisi delle fonti di errore e delle
incertezze relative al metodo di calcolo.
Sarà presentato infine un algoritmo in grado di ricavare, partendo dalla
simulazione di ricezione di segnali pulsar, il posizionamento di un punto
nello spazio, nonché di ricostruire la sua orbita.
1
Capitolo 1
Pulsar
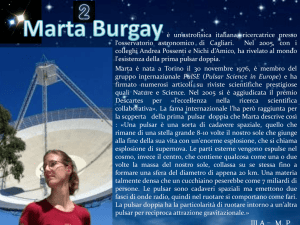
Alla fine della loro vita, le stelle aventi una massa di circa dieci volte
superiore a quella solare esplodono come supernovae: questa esplosione può
portare alla nascita di una stella di neutroni, nome dovuto alla sua
composizione interna. Tali corpi celesti risultano avere una massa pari a circa
1,5 masse solari ed un raggio di circa 10 km, il che implica densità enormi
(dell’ordine di 1014 g/cm3) (Figura 1.1).
Figura 1.1: la stella di neutroni.
Una stella di neutroni isolata, senza alcuna materia attorno ad essa, è
pressoché invisibile: la sua altissima temperatura la porta ad emettere
un’esigua quantità di radiazione visibile ma, data la sua piccola dimensione,
la luce emessa non è rilevabile a distanze astronomiche.
2
Se, al contrario, la stella di neutroni ha una compagna oppure è circondata da
materia (ad esempio una nube di gas), questa può cederle massa: in tal caso
la stella di neutroni si rende visibile e può manifestarsi sotto varie forme.
Le pulsar – pulsating stars – sono una di tali forme osservabili dalla Terra.
Esse derivano il loro nome dalla capacità di emissione di impulsi di
radiazione fortemente direzionali. Furono scoperte nel 1967 da Jocelyn Bell,
studentessa presso l'Università di Cambridge, e Antony Hewish, vincitore del
premio Nobel per la fisica nel 1974, mentre stavano cercando di studiare la
scintillazione delle quasar1.
Le stelle di neutroni ruotano in modo molto rapido dopo la loro creazione per
via della legge di conservazione del momento angolare: una stella di neutroni
appena nata può ruotare molte volte al secondo. In generale, la velocità
angolare massima che questi corpi possono raggiungere dipende dalla forza
di coesione dei protoni all'interno degli stessi. In questo giocano un ruolo
fondamentale sia la forza di gravità che la forza di interazione forte2.
Col tempo le stelle di neutroni rallentano la rotazione dal momento che i loro
campi magnetici, molto intensi, irradiano energia verso l'esterno. Questo
effetto è detto frenamento magnetico: nel caso delle pulsar, il frenamento
magnetico aumenta l'intervallo tra un impulso e un altro.
Il ritmo a cui una stella di neutroni rallenta la propria rotazione è comunque
costante e molto lento: i ritmi osservati sono tra 10-12 e 10-19 secondi al
secolo. Le stelle di neutroni con un campo magnetico più debole, inoltre,
risentono di un frenamento magnetico meno efficace, impiegando dunque più
tempo per rallentare.
__________________________________________________________________
Una quasar (contrazione di quasi-stellar radio source, radiosorgente quasi stellare) è un
oggetto astronomico che somiglia ad una stella in un telescopio ottico (cioè è una sorgente
puntiforme), e che mostra un grande spostamento verso il rosso (redshift) del suo spettro.
Con scintillazione si indica la rapida variazione della luminosità o del colore di un oggetto
luminoso distante, osservato attraverso l’atmosfera terrestre.
1
Trattasi della forza che tiene legati neutroni e protoni nei nuclei degli atomi e, su distanze
nucleari (10-13 cm), essa vince su quella elettromagnetica.
2
3
Queste differenze infinitesimali sono facilmente e precisamente misurabili da
orologi atomici, sui quali ogni osservatore di pulsar si sincronizza.
Il campo magnetico di questi corpi celesti, cento miliardi di volte superiore a
quello terrestre, può essere in generale approssimato ad un campo di dipolo
simile a quello di un’enorme calamita. Tale modello spiega il fenomeno
pulsar: la materia ionizzata catturata dal campo magnetico (principalmente
elettroni) viene convogliata verso i poli magnetici della stella. L'accelerazione
che ne consegue porta gli elettroni a velocità prossime a quella della luce e
provoca l'emissione di onde elettromagnetiche, soprattutto alle lunghezze
d'onda radio.
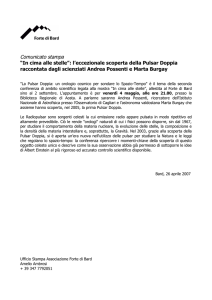
Il fatto che l'emissione non avvenga su una superficie sferica, ma solo nelle
due regioni polari, nonché il disallineamento dell'asse di rotazione rispetto a
quello magnetico, fan sì che le pulsar si comportino come dei fari: quando la
nostra linea di vista intercetta uno (o entrambi) i coni di emissione, allora
vediamo la radiazione emessa per il tempo che impiega tale cono ad
attraversare tale linea (Figura 1.2).
Percepiamo quindi l'emissione come un impulso con periodo uguale a quello
di rotazione della stella di neutroni (la metà se entrambi i coni intercettano la
nostra linea di vista).
Figura 1.2: il “fenomeno pulsar”.
4
Capitolo 2
Relativistic positioning
2.1 Emission Coordinates
Lo spazio-tempo è un concetto fisico, diretta conseguenza della teoria della
relatività ristretta, che combina le classiche nozioni tradizionalmente distinte
di spazio e di tempo in un solo costrutto unico e omogeneo. Secondo la
relatività generale, spazio e tempo costituiscono dunque una varietà
geometrica3 a quattro dimensioni, deformata a causa della presenza del
campo gravitazionale.
I punti dello spazio-tempo sono detti “eventi” e ciascuno di essi corrisponde
ad un fenomeno che si verifica in una certa posizione spaziale in un
determinato istante (vedi Appendice A). Al fine di localizzare un evento nello
spazio-tempo, sono necessari quattro parametri indipendenti: potremmo
banalmente considerare le tre coordinate spaziali cartesiane ed una
coordinata temporale, ma in generale è sufficiente una quaterna di valori
numerici indipendenti.
Consideriamo allora quattro orologi atomici, per semplicità in caduta libera
(moto geodetico4), che trasmettano regolarmente il proprio tempo tramite
segnali elettromagnetici.
__________________________________________________________________
In geometria, una varietà è un concetto abbastanza generale definito con lo scopo di
modellare "spazi a più dimensioni", eventualmente curvi, che "visti con una lente di
ingrandimento" sembrano piatti e simili allo spazio euclideo, ma che visti globalmente
possono assumere le forme più svariate.
3
Le geodetiche descrivono la traiettoria di un punto materiale in presenza di un campo
gravitazionale.
4
5
Un osservatore che è in grado di ricevere tali segnali da ognuno dei quattro
emettitori può dunque ottenere, in qualsiasi momento, i tempi corretti di
emissione del segnale di ciascuna sorgente.
Ogni quaterna formata da questi tempi dipende dalla posizione nello spazio-
tempo del ricevitore e ad essa è univocamente associato un evento: risulta
che i quattro tempi veicolati dai segnali elettromagnetici rappresentano
effettivamente un buon set di coordinate per individuare la posizione di un
osservatore nello spazio-tempo.
Queste coordinate sono dunque note come emission coordinates, coordinate
di emissione.
2.2 Posizionamento relativistico
Analizziamo ora il metodo di calcolo per il posizionamento di un osservatore
nello spazio tramite l’utilizzo delle emission coordinates. Tale approccio è
stato già affrontato da diversi autori: qui faremo riferimento in particolar
modo al modello proposto dal Prof. A. Tartaglia e dai suoi collaboratori in
[1], [2], [3].
2.2.1 Definizione del Sistema di riferimento e composizione della
Griglia nello spazio-tempo
Prendiamo in esame una singola sorgente di onde elettromagnetiche, fissa
nello spazio e in grado di emettere impulsi periodici: a distanza infinita, un
osservatore percepirà i singoli fronti d’onda come piani e, nel complesso, il
segnale come un set di fronti d’onda planari che si muovono alla velocità
della luce. Dal momento che lo spazio-tempo di Minkowski (vedi Appendice
A) è quadridimensionale, risulta più corretto identificare ogni impulso in un
iperpiano5.
__________________________________________________________________
uno spazio di dimensione finita n, è detto iperpiano un sottospazio di dimensione n-1.
In questo caso il nostro iperpiano avrà dimensione 3.
5 Dato
6
L’orientamento del segnale è quindi definito da un quadrivettore6 nullo7,
ortogonale a tali iperpiani e che può essere espresso nella forma:
𝒇𝒇 = 𝑓𝑓 𝜇𝜇 = (𝑓𝑓 0 , 𝑓𝑓 1 , 𝑓𝑓 2 , 𝑓𝑓 3 ) =
1
(1, 𝐧𝐧
�)
𝑐𝑐𝑐𝑐
(2.1)
dove c è la velocità della luce e T rappresenta il periodo degli impulsi forniti
in un sistema di riferimento dove la sorgente è fissa.
� è un versore di tipo spazio, a tre dimensioni, che descrive la direzione di
𝐧𝐧
propagazione del segnale in un sistema a coordinate cartesiane di origine
arbitraria: le sue componenti sono i coseni direttori del vettore rispetto agli
assi (vedi Appendice B).
Il fattore 1/cT è infine utile per ottenere quattro coordinate fisicamente
omogenee.
Dal momento che stiamo parlando di impulsi elettromagnetici, il
quadrivettore 𝒇𝒇 è auto-normale, ovvero si ha che 𝒇𝒇 ∙ 𝒇𝒇 = 0.
Consideriamo ora N sorgenti fisse che emettono segnali periodici
caratterizzati ciascuno da una frequenza e da una direzione nello spazio.
Al fine del calcolo della posizione di un ricevitore nello spazio, sono
necessarie almeno quattro sorgenti. Consideriamo dunque N pari a 4: si
avranno quattro famiglie di iperpiani, definite ciascuna da un quadrivettore
𝒇𝒇, che si intersecheranno le une con le altre e andranno a formare nell’intero
spazio circostante una sorta di reticolo o griglia.
Identificando tali sorgenti con gli indici 𝑎𝑎, 𝑏𝑏, 𝑐𝑐 e 𝑑𝑑, risulta che i quattro
quadrivettori nulli �𝒇𝒇(𝑎𝑎) , 𝒇𝒇(𝑏𝑏) , 𝒇𝒇(𝑐𝑐) , 𝒇𝒇(𝑑𝑑) � , essendo linearmente indipendenti,
rappresentano una base nello spazio-tempo di Minkowski e dunque un
sistema di riferimento nullo.
__________________________________________________________________
In relatività ristretta, un quadrivettore, o tetravettore, è un vettore dello spazio-tempo di
Minkowski, rappresentato da una quadrupla di valori che nelle trasformazioni di coordinate
tra
due
riferimenti
inerziali
rispetta
le
trasformazioni
di
Lorentz.
0
1
2
3
m:=(m ,m ,m ,m )=(ct,x,y,z). Vedi Appendice A.
6
Il termine “nullo” nel corso del presente testo indicherà grandezze vettoriali di tipo luce.
Vedi Appendice A.
7
7
Introduciamo ora, nel medesimo sistema di riferimento in cui è definito il
vettore di propagazione del segnale e quindi sempre rispetto ad un’origine
arbitraria, il quadrivettore di posizione 𝒓𝒓 = (𝑐𝑐𝑐𝑐, 𝐱𝐱�), con 𝐱𝐱� vettore spaziale a
tre dimensioni.
Tale quadrivettore può anche essere scritto, secondo il formalismo delle
tetradi9 e utilizzando la convenzione di Einstein8, nella forma:
𝒓𝒓 = 𝑋𝑋 (𝑁𝑁) 𝒇𝒇(𝑁𝑁) = 𝑋𝑋(𝑁𝑁) 𝒇𝒇(𝑁𝑁) ,
𝑁𝑁 = 𝑎𝑎, 𝑏𝑏, 𝑐𝑐, 𝑑𝑑
(2.2)
dove è utile precisare che, mentre il sistema �𝒇𝒇(𝑁𝑁) � = �𝒇𝒇(𝑎𝑎) , 𝒇𝒇(𝑏𝑏) , 𝒇𝒇(𝑐𝑐) , 𝒇𝒇(𝑑𝑑) � è
costituito da vettori nulli, il sistema �𝒇𝒇(𝑁𝑁) � = { 𝒇𝒇(𝑎𝑎) , 𝒇𝒇(𝑏𝑏) , 𝒇𝒇(𝑐𝑐) , 𝒇𝒇(𝑑𝑑) } è costituito
da vettori di tipo spazio.
Lo scalare X
è una funzione relativa all’evento spazio-temporale che,
identificata appunto dal quadrivettore 𝒓𝒓, può essere pensata come la
differenza di fase dell’onda, descritta da 𝒇𝒇, rispetto al suo valore nell’origine
del sistema una volta raggiunto l’evento:
𝑋𝑋(𝒓𝒓) = 𝒇𝒇 ∙ 𝒓𝒓 .
L’operatore “∙” identifica il prodotto scalare di Minkowski.
Le quattro differenze di fase
𝑋𝑋(𝑁𝑁) = 𝒇𝒇(𝑁𝑁) ∙ 𝒓𝒓,
(2.3)
(2.4)
relative ad ogni evento 𝒓𝒓, sono coordinate nulle e definiscono dunque un
sistema di coordinate nullo.
Inoltre, dal momento che sono legate fisicamente alla recezione di segnali
elettromagnetici emessi dalle sorgenti, sono a tutti gli effetti anche delle
emission coordinates.
__________________________________________________________________
Secondo questa convenzione, ogni indice che compare all'interno di un fattore più di una
volta deve essere sommato al variare di tutti i possibili valori che l'indice può assumere.
Nelle applicazioni più comuni l'indice può valere 1,2,3 (per calcoli nello spazio euclideo), o
1,2,3,4 (per calcoli nello spazio di Minkowski), ma esso può variare in qualsiasi intervallo.
8
Il formalismo tetrade è un approccio alla relatività generale che sostituisce una scelta di
coordinate locali alla scelta meno restrittiva di una base locale.
9
8
In sostanza, se consideriamo gli iperpiani relativi al sistema nullo
�𝒇𝒇(𝑎𝑎) , 𝒇𝒇(𝑏𝑏) , 𝒇𝒇(𝑐𝑐) , 𝒇𝒇(𝑑𝑑) �, nella griglia da essi definita rispetto ad un’origine
arbitraria ogni evento è identificato da una propria fase dei segnali
elettromagnetici: le coordinate dell’evento sono date, in tale sistema di
riferimento, dalle funzioni { 𝑋𝑋 (𝑁𝑁) }. Allo stesso modo, per la (2.2), le fasi { 𝑋𝑋(𝑁𝑁) }
rappresentano le coordinate del sistema { 𝒇𝒇(𝑎𝑎) , 𝒇𝒇(𝑏𝑏) , 𝒇𝒇(𝑐𝑐) , 𝒇𝒇(𝑑𝑑) }.
Se un osservatore si trovasse allora in moto nello spazio-tempo, la sua linea
di universo andrebbe ad intercettare una serie di iper-celle di tale griglia,
aventi i bordi di lunghezza pari a cT(a), cT(b), cT(c), cT(d): l’intersezione fra la
linea di universo ed un iperpiano identificherebbe l’evento di ricezione del
corrispondente impulso.
2.2.2 Posizionamento all’interno della griglia per N=4 sorgenti
Supponiamo che l’osservatore sia dotato di un ricevitore in grado di
riconoscere e contare gli impulsi provenienti da ciascuna delle sorgenti di
segnali elettromagnetici periodici (nel nostro caso reale quattro pulsar
opportunamente scelte). Al fine del calcolo è quindi fondamentale conoscere
� di propagazione dei vari segnali e le frequenze ν proprie di
i quattro vettori 𝐧𝐧
questi ultimi.
Ammettiamo inoltre che il ricevitore sia dotato di un orologio atomico in
grado di misurare con precisione, per ogni pulsar, gli intervalli temporali fra
l’arrivo di un impulso e il successivo.
Costruiamo allora il sistema di riferimento inerziale delle sorgenti e poniamo
nella sua origine (arbitraria) un evento iniziale 𝒓𝒓 = 0, dal quale vengono
misurate le fasi di ciascun segnale. Chiameremo ricezione l’evento
corrispondente all’arrivo di un impulso da una sorgente.
Ad un successivo evento 𝒓𝒓 associamo le quattro differenze di fase (2.4): in
accordo alla (2.2) è possibile ottenere le coordinate dell’evento in funzione
delle differenze di fase misurate:
𝒓𝒓 = 𝑋𝑋(𝑎𝑎) 𝒇𝒇(𝑎𝑎) + 𝑋𝑋(𝑏𝑏) 𝒇𝒇(𝑏𝑏) + 𝑋𝑋(𝑐𝑐) 𝒇𝒇(𝑐𝑐) + 𝑋𝑋(𝑑𝑑) 𝒇𝒇(𝑑𝑑) .
9
(2.5)
Le 𝑋𝑋(𝑁𝑁) , dal momento che i segnali emessi delle pulsar non sono continui e
consistono di una serie di impulsi, sono esprimibili come somma di un valore
intero n, che numera l’ordine di arrivo di tali impulsi, e da una frazione χ , il
cui valore solitamente varia da 0 a 1:
𝑋𝑋(𝑎𝑎) = 𝑛𝑛(𝑎𝑎) + 𝜒𝜒(𝑎𝑎) ,
(2.6)
𝑋𝑋(𝑏𝑏) = 𝑛𝑛(𝑏𝑏) + 𝜒𝜒(𝑏𝑏) ,
(2.7)
𝑋𝑋(𝑑𝑑) = 𝑛𝑛(𝑑𝑑) + 𝜒𝜒(𝑑𝑑) ,
(2.9)
𝑋𝑋(𝑐𝑐) = 𝑛𝑛(𝑐𝑐) + 𝜒𝜒(𝑐𝑐) ,
(2.8)
Nelle equazioni (2.6 - 2.9), solo una delle χ sarà in generale a zero: quando
arriva, per esempio, un impulso dalla sorgente a, 𝜒𝜒(𝑎𝑎) sarà pari a zero,
mentre 𝜒𝜒(𝑏𝑏) , 𝜒𝜒(𝑐𝑐) , 𝜒𝜒(𝑑𝑑) no. Parimenti, quando arriva un impulso dalla sorgente
b, 𝜒𝜒(𝑏𝑏) sarà pari a zero mentre le altre tre frazioni no, e così via.
Una volta scelta un’origine arbitraria, il ricevitore è in grado di contare gli
impulsi per ottenere le n(N); non ha tuttavia mezzi per misurare in modo
diretto i valori frazionari 𝜒𝜒(𝑁𝑁) . Essi possono comunque essere ricavati tramite
calcolo numerico, a seguito di opportune ipotesi geometriche: supponiamo
che l'accelerazione dell'utente sia molto piccola nel corso di una serie limitata
di eventi di ricezione e che la sua linea di universo possa essere quindi
identificata, in questo intervallo, con una linea retta. Tale ipotesi è detta di
linearità. Sapendo che l’osservatore è in grado di misurare il corretto
intervallo di tempo τij tra l’evento di arrivo i-esimo e j-esimo, procediamo
come segue per determinare i valori frazionari χ.
Prendiamo in considerazione due sequenze10 di tempi di arrivo dalle
sorgenti: abbiamo otto eventi, ciascuno dei nella forma
𝒓𝒓𝑗𝑗 = 𝑋𝑋(𝑎𝑎)𝑗𝑗 𝒇𝒇(𝑎𝑎) + 𝑋𝑋(𝑏𝑏)𝑗𝑗 𝒇𝒇(𝑏𝑏) + 𝑋𝑋(𝑐𝑐)𝑗𝑗 𝒇𝒇(𝑐𝑐) + 𝑋𝑋(𝑑𝑑)𝑗𝑗 𝒇𝒇(𝑑𝑑) , 𝑗𝑗 = 1, … 8,
dove le 𝑋𝑋(𝑁𝑁)𝑗𝑗 sono espressioni come le (2.6 - 2.9).
(2.10)
__________________________________________________________________
Essi possono essere successivi o no, purché l'intervallo di tempo totale non faccia decadere
l'ipotesi di linearità della linea di universo.
10
10
Gli eventi sono disposti in modo tale che 𝒓𝒓1 sia l'arrivo del segnale generico
dalla pulsar 𝑎𝑎 e 𝒓𝒓2 , 𝒓𝒓3 , 𝒓𝒓4 siano gli arrivi del primo segnale, dopo 𝒓𝒓1 ,
rispettivamente delle pulsar 𝑏𝑏, 𝑐𝑐 e 𝑑𝑑. 𝒓𝒓5 è l'arrivo del segnale successivo della
pulsar 𝑎𝑎, e così via. Le pulsar sono ordinate in funzione del periodo: dal più
grande, corrispondente ad 𝑎𝑎, al più breve, corrispondente a 𝑑𝑑.
L’ipotesi geometrica della planarità dei fronti d’onda consente di scrivere il
quadrivettore spostamento tra due eventi di ricezione come:
𝒓𝒓𝑖𝑖𝑖𝑖 = 𝒓𝒓𝑖𝑖 − 𝒓𝒓𝑗𝑗 = �𝑋𝑋(𝑁𝑁)𝑖𝑖 − 𝑋𝑋(𝑁𝑁)𝑗𝑗 �𝒇𝒇(𝑁𝑁) = Δ𝑋𝑋(𝑁𝑁)𝑖𝑖𝑖𝑖 𝒇𝒇(𝑁𝑁) .
(2.11)
Prendiamo ora in considerazione tre eventi di ricezione successivi i, j, k :
𝒓𝒓𝑗𝑗𝑗𝑗 = Δ𝑋𝑋(𝑁𝑁)𝑗𝑗𝑗𝑗 𝒇𝒇(𝑁𝑁) ,
𝒓𝒓𝑘𝑘𝑘𝑘 = Δ𝑋𝑋(𝑁𝑁)𝑘𝑘𝑘𝑘 𝒇𝒇(𝑁𝑁) .
(2.12)
Grazie all’ipotesi di linearità possiamo scrivere:
Δ𝑋𝑋(𝑎𝑎)𝑗𝑗𝑗𝑗
Δ𝑋𝑋(𝑏𝑏)𝑗𝑗𝑗𝑗
Δ𝑋𝑋(𝑐𝑐)𝑗𝑗𝑗𝑗
Δ𝑋𝑋(𝑑𝑑)𝑗𝑗𝑗𝑗
𝜏𝜏𝑗𝑗𝑗𝑗
=
=
=
=
,
𝜏𝜏𝑘𝑘𝑘𝑘
Δ𝑋𝑋(𝑎𝑎)𝑘𝑘𝑘𝑘 Δ𝑋𝑋(𝑏𝑏)𝑘𝑘𝑘𝑘 Δ𝑋𝑋(𝑐𝑐)𝑘𝑘𝑘𝑘 Δ𝑋𝑋(𝑑𝑑)𝑘𝑘𝑘𝑘
(2.13)
dove τji e τkj sono i tempi corretti trascorsi rispettivamente tra l'i-esimo e il j-
esimo evento di ricezione e il j-esima e il k-esimo.
Queste relazioni ci permettono di ottenere i valori χ che ci interessano:
possiamo organizzare infatti i coefficienti dell’equazione (2.10) in una
matrice 8 × 4 (8 eventi, 4 fonti):
(𝑎𝑎)
𝑛𝑛1
𝑋𝑋(𝑁𝑁)𝑖𝑖
⎛𝑛𝑛2(𝑎𝑎) + 𝜒𝜒2(𝑎𝑎)
⎜ (𝑎𝑎)
(𝑎𝑎)
⎜𝑛𝑛3 + 𝜒𝜒3
⎜𝑛𝑛(𝑎𝑎) + 𝜒𝜒 (𝑎𝑎)
= ⎜ 4 (𝑎𝑎) 4
⎜ 𝑛𝑛5
⎜ (𝑎𝑎)
(𝑎𝑎)
⎜𝑛𝑛6 + 𝜒𝜒6
⎜𝑛𝑛(𝑎𝑎) + 𝜒𝜒 (𝑎𝑎)
7
7
(𝑎𝑎)
(𝑎𝑎)
⎝𝑛𝑛8 + 𝜒𝜒8
(𝑏𝑏)
(𝑏𝑏)
𝑛𝑛1 + 𝜒𝜒1
(𝑏𝑏)
𝑛𝑛2
(𝑏𝑏)
(𝑏𝑏)
𝑛𝑛3 + 𝜒𝜒3
(𝑏𝑏)
(𝑏𝑏)
𝑛𝑛4 + 𝜒𝜒4
(𝑏𝑏)
(𝑏𝑏)
𝑛𝑛5 + 𝜒𝜒5
(𝑏𝑏)
𝑛𝑛6
(𝑏𝑏)
(𝑏𝑏)
𝑛𝑛7 + 𝜒𝜒7
(𝑏𝑏)
(𝑏𝑏)
𝑛𝑛8 + 𝜒𝜒8
(𝑐𝑐)
(𝑐𝑐)
𝑛𝑛1 + 𝜒𝜒1
(𝑐𝑐)
(𝑐𝑐)
𝑛𝑛2 + 𝜒𝜒2
(𝑐𝑐)
𝑛𝑛3
(𝑐𝑐)
(𝑐𝑐)
𝑛𝑛4 + 𝜒𝜒4
(𝑐𝑐)
(𝑐𝑐)
𝑛𝑛5 + 𝜒𝜒5
(𝑐𝑐)
(𝑐𝑐)
𝑛𝑛6 + 𝜒𝜒6
(𝑐𝑐)
𝑛𝑛7
(𝑐𝑐)
(𝑐𝑐)
𝑛𝑛8 + 𝜒𝜒8
(𝑑𝑑)
(𝑑𝑑)
𝑛𝑛1 + 𝜒𝜒1
(𝑑𝑑)
(𝑑𝑑)
𝑛𝑛2 + 𝜒𝜒2 ⎞
(𝑑𝑑)
(𝑑𝑑) ⎟
𝑛𝑛3 + 𝜒𝜒3 ⎟
(𝑑𝑑)
⎟
𝑛𝑛4
⎟
(𝑑𝑑)
(𝑑𝑑)
𝑛𝑛5 + 𝜒𝜒5 ⎟
(𝑑𝑑)
(𝑑𝑑) ⎟
𝑛𝑛6 + 𝜒𝜒6 ⎟
(𝑑𝑑)
(𝑑𝑑)
𝑛𝑛7 + 𝜒𝜒7 ⎟
(𝑑𝑑)
𝑛𝑛8
(2.14)
⎠
Come si vede, le χ assumono valore zero lungo le diagonali principali della
metà matrice superiore e di quella inferiore.
Questo avviene in corrispondenza degli arrivi degli impulsi provenienti dalle
varie pulsar: all’arrivo di un impulso da 𝑎𝑎, la corrispondente 𝜒𝜒(𝑎𝑎) è zero;
parimenti all’arrivo di un impulso da 𝑏𝑏, 𝜒𝜒(𝑏𝑏) è zero, e così via.
11
Utilizzando le relazioni della (2.13) si ottengono i valori frazionari nei
termini degli intervalli corretti di tempo misurati dall’osservatore. Avremo:
(𝑎𝑎)
𝜒𝜒1
(𝑏𝑏)
𝜒𝜒1
(𝑐𝑐)
= 0,
(𝑏𝑏)
(𝑏𝑏)
(𝑏𝑏)
(𝑐𝑐)
(𝑐𝑐)
(𝑐𝑐)
(𝑑𝑑)
(𝑑𝑑)
(𝑑𝑑)
(𝑑𝑑)
(𝑎𝑎)
(𝑎𝑎)
(𝑎𝑎)
(𝑎𝑎)
(𝑐𝑐)
(𝑐𝑐)
(𝑑𝑑)
(𝑑𝑑)
(𝑑𝑑)
(𝑑𝑑)
(𝑎𝑎)
(𝑎𝑎)
(𝑎𝑎)
(𝑎𝑎)
(𝑏𝑏)
(𝑏𝑏)
(𝑏𝑏)
(𝑏𝑏)
(𝑑𝑑)
(𝑑𝑑)
(𝑑𝑑)
(𝑑𝑑)
(𝑎𝑎)
(𝑎𝑎)
(𝑎𝑎)
(𝑎𝑎)
(𝑏𝑏)
(𝑏𝑏)
(𝑏𝑏)
(𝑏𝑏)
(𝑐𝑐)
(𝑐𝑐)
(𝑐𝑐)
(𝑐𝑐)
𝜒𝜒1 = 𝑛𝑛3 − 𝑛𝑛1 − �𝑛𝑛7 − 𝑛𝑛3 �
(𝑑𝑑)
𝜏𝜏21
,
𝜏𝜏62
(𝑏𝑏)
= 𝑛𝑛2 − 𝑛𝑛1 − �𝑛𝑛6 − 𝑛𝑛2 �
𝜏𝜏31
,
𝜏𝜏73
= 𝑛𝑛4 − 𝑛𝑛1 − �𝑛𝑛8 − 𝑛𝑛4 �
𝜒𝜒2
= 𝑛𝑛1 − 𝑛𝑛2 + �𝑛𝑛5 − 𝑛𝑛1 �
𝜏𝜏41
,
𝜏𝜏84
𝜒𝜒1
(𝑎𝑎)
(𝑏𝑏)
𝜒𝜒2
(𝑐𝑐)
= 0,
(𝑐𝑐)
(𝑐𝑐)
𝜒𝜒2 = 𝑛𝑛3 − 𝑛𝑛2 + �𝑛𝑛7 − 𝑛𝑛3 �
(𝑑𝑑)
𝜏𝜏21
,
𝜏𝜏51
𝜏𝜏23
,
𝜏𝜏73
= 𝑛𝑛4 − 𝑛𝑛2 + �𝑛𝑛8 − 𝑛𝑛4 �
𝜒𝜒3
= 𝑛𝑛1 − 𝑛𝑛3 + �𝑛𝑛5 − 𝑛𝑛1 �
𝜒𝜒3
= 𝑛𝑛2 − 𝑛𝑛3 − �𝑛𝑛6 − 𝑛𝑛2 �
𝜏𝜏24
,
𝜏𝜏84
𝜒𝜒2
(𝑎𝑎)
(𝑏𝑏)
(𝑐𝑐)
𝜒𝜒3 = 0,
(𝑑𝑑)
𝜏𝜏31
,
𝜏𝜏51
𝜏𝜏23
,
𝜏𝜏62
= 𝑛𝑛4 − 𝑛𝑛3 + �𝑛𝑛8 − 𝑛𝑛4 �
𝜒𝜒4
= 𝑛𝑛1 − 𝑛𝑛4 + �𝑛𝑛5 − 𝑛𝑛1 �
𝜒𝜒4
= 𝑛𝑛2 − 𝑛𝑛4 − �𝑛𝑛6 − 𝑛𝑛2 �
𝜏𝜏34
,
𝜏𝜏84
𝜒𝜒3
(𝑎𝑎)
(𝑏𝑏)
(𝑐𝑐)
(𝑐𝑐)
𝜒𝜒4 = 𝑛𝑛3 − 𝑛𝑛4 − �𝑛𝑛7 − 𝑛𝑛3 �
(𝑑𝑑)
𝜒𝜒4
= 0,
𝜏𝜏41
,
𝜏𝜏51
𝜏𝜏24
,
𝜏𝜏62
𝜏𝜏34
,
𝜏𝜏73
12
e via seguendo.
Spostando la coppia di sequenze e ripetendo le operazioni passo dopo passo,
siamo in grado di ricostruire l'intera linea di universo del ricevitore in
termini di tempi di arrivo.
Richiamiamo a questo punto l’equazione (2.4): essa ci permette di calcolare
le esatte coordinate 𝑥𝑥̅ di ogni evento 𝒓𝒓 e, per farlo, può essere scritta in forma
di sistema lineare:
𝐴𝐴𝑥𝑥̅ = 𝑦𝑦�
(2.15)
in cui il vettore 𝑦𝑦� ha come componenti le differenze di fase X(N)
precedentemente ricavate:
mentre la matrice
𝑋𝑋(𝑎𝑎)
⎛𝑋𝑋(𝑏𝑏) ⎞
𝑦𝑦� = ⎜
,
𝑋𝑋(𝑐𝑐) ⎟
0
𝑓𝑓(𝑎𝑎)
0
⎛𝑓𝑓(𝑏𝑏)
𝐴𝐴 = ⎜ 0
𝑓𝑓(𝑐𝑐)
0
⎝𝑓𝑓(𝑑𝑑)
⎝
𝑋𝑋(𝑑𝑑)
1
−𝑓𝑓(𝑎𝑎)
1
−𝑓𝑓(𝑏𝑏)
1
−𝑓𝑓(𝑐𝑐)
1
−𝑓𝑓(𝑑𝑑)
⎠
(2.16)
2
−𝑓𝑓(𝑎𝑎)
3
−𝑓𝑓(𝑎𝑎)
2
−𝑓𝑓(𝑑𝑑)
(𝑐𝑐)
3
−𝑓𝑓(𝑑𝑑)
⎠
2
−𝑓𝑓(𝑏𝑏)
2
−𝑓𝑓(𝑐𝑐)
3
−𝑓𝑓(𝑏𝑏)
⎞
3 ⎟
−𝑓𝑓
(2.17)
ha come componenti le 𝒇𝒇(𝑁𝑁) , che, come visto, sono dipendenti sia dai periodi
0 −1
𝑖𝑖
𝑖𝑖
dei segnali 𝑇𝑇(𝑁𝑁) = (𝑐𝑐𝑓𝑓(𝑁𝑁)
) , sia dai coseni direttori 𝑛𝑛(𝑁𝑁)
= 𝑐𝑐𝑇𝑇(𝑁𝑁) 𝑓𝑓(𝑁𝑁)
, indicanti
le posizioni angolari delle sorgenti.
�(𝑁𝑁) tutti differenti, A risulta essere una matrice non singolare: il
Essendo gli 𝐧𝐧
generico vettore
𝑥𝑥 0
𝑐𝑐𝑐𝑐
1
𝑥𝑥
𝑥𝑥̅ = �𝑥𝑥 2 � = � 𝑦𝑦 �,
𝑥𝑥
𝑧𝑧
𝑥𝑥 3
(2.18)
appartenente a ℝ4 (da non confondere quindi con un quadrivettore), potrà
pertanto essere calcolato tramite il sistema 𝑥𝑥̅ = 𝐴𝐴−1 𝑦𝑦� e l’utente sarà in grado
di ricavare per ogni evento di ricezione degli impulsi la propria posizione
nello spazio.
13
E’ opportuno ricordare che il metodo di calcolo qui descritto fornisce
soluzioni rispetto ad un’origine scelta arbitrariamente in un sistema di
riferimento in cui le sorgenti sono fisse: ciò significa che esso non provvede
ad un posizionamento assoluto nello spazio, bensì relativo ad un evento
iniziale che si collocherà in tale origine. All’atto pratico, dunque, la
localizzazione esatta di un utente in moto nello spazio è possibile a patto di
conoscere le coordinate relative al punto di partenza,
corrispondenti
all’evento di ricezione iniziale, ovvero il momento in cui viene acceso il
ricevitore.
2.3 Errori sistematici e limiti del metodo di calcolo
L'errore sistematico (o determinato) è definito come lo scostamento tra il
valore ottenuto con una misurazione ed il valore reale della grandezza
studiata: è indice dell'accuratezza11 dei dati. È detto sistematico perché è
costante al ripetersi della misura e, per questo, non può essere eliminato con
la ripetizione della misurazione, come avviene per l'errore statistico.
In generale, gli errori sistematici dipendono dalla scarsa conoscenza di alcuni
parametri del sistema o da una ricostruzione non corretta o approssimativa
dei processi fisici alla base del modello di calcolo.
2.3.1 Sorgenti in movimento
Ipotesi base del modello di calcolo proposto è considerare le sorgenti di
segnali pulsanti fisse nello spazio, a distanza infinita: questo comporta un
errore sistematico, dal momento che qualsiasi sorgente, in particolare una
pulsar, possiede un moto proprio ed è locata ad una distanza finita
dall’osservatore.
__________________________________________________________________
L'accuratezza è il grado di corrispondenza del dato teorico, desumibile da una serie di
valori misurati (campione di dati), con il dato reale o di riferimento, ovvero la differenza tra
valor medio campionario e valore vero o di riferimento.
11
14
Ad ogni modo, considerando appunto il caso di pulsar reali, è stato stimato
che il rateo di variazione della posizione angolare è genericamente
100 pc
dell’ordine di 10−6 �
𝑑𝑑
� rad all’anno: in pratica, è possibile considerare tali
sorgenti fisse nello spazio per diversi mesi prima di correggere il valore dei
coseni direttori relativi alla direzione di propagazione dei loro segnali. Si
presuppone, ovviamente, la conoscenza del comportamento delle pulsar nel
tempo.
La grande distanza che ci separa da esse, infine, permette di mantenere
valida la seconda ipotesi iniziale.
2.3.2 Aumento del periodo dei segnali pulsar
E’ noto che, come visto nel capitolo 1, le pulsar sono soggette al frenamento
magnetico, il quale comporta una perdita di energia da parte della stella.
Questa perdita si traduce in un aumento del periodo dei segnali
elettromagnetici da essa emessi: in generale, comunque, essendo anche
questo rateo di decadimento noto e molto piccolo, è possibile considerare i
periodi delle pulsar “fissi” per lungo tempo (compatibilmente all’accuratezza
richiesta) per poi essere corretti.
2.3.3 Ipotesi di planarità
Al fine del calcolo è utile garantire che, per tempi sufficientemente brevi, i
fronti d’onda dei segnali emessi dalle sorgenti possano essere considerati
delle superfici piane.
Per giustificare la validità di tale assunzione in un contesto fisico reale,
possiamo pensare che la velocità relativa di un emettitore rispetto
all’osservatore sia, ad oggi, dell’ordine di 104 m/s: ciò implica uno
spostamento massimo dell’ordine del metro durante il periodo di
integrazione dell’algoritmo. A distanze molto elevate questo spostamento è
percepito come una variazione angolare dai μrad fino ai nrad. Anche
considerassimo
un’accelerazione
relativa
15
dell’emettitore
rispetto
al
ricevitore, la più alta credibile porterebbe a una variazione della velocità
dell’ordine del cm/s: lo scostamento dalla planarità sarebbe dell’ordine di
1/1019, tranquillamente trascurabile dunque per tempi brevi di ricezione e
integrazione.
2.3.4 Ipotesi di linearità
Cerchiamo di giustificare ora l’ipotesi di linearità, introdotta in 2.2.2, e di
analizzare la validità di tale approssimazione, secondo cui è possibile, per
tempi sufficientemente brevi e corrispondenti a pochi eventi di ricezione,
considerare la linea di universo dell’osservatore come una retta.
Chiamiamo δτ12 la precisione dell'orologio montato sul ricevitore e definiamo
il massimo intervallo di tempo Δτmax , cosicché valga la seguente relazione:
𝛥𝛥𝛥𝛥𝑚𝑚𝑚𝑚𝑚𝑚 = �
2 𝑣𝑣 𝛿𝛿𝛿𝛿
,
𝑎𝑎
(2.19)
dove 𝑎𝑎 rappresenta l’ordine di grandezza dell’accelerazione dell’utente, 𝑣𝑣 la
sua velocità.
Supponiamo allora che l’utente sia in movimento nello spazio-tempo con, per
esempio, δτ ≃ 10-10 s, 𝑣𝑣 = 5×105 m/s e 𝑎𝑎 = 1 m/s2: per la (2.19) il Δτmax
sarà dell’ordine di 10-2 s. Tale intervallo è corrispondente a diversi periodi di
emissione dei segnali di una pulsar millisecondo13 ed è sufficiente al fine
della ricostruzione a tratti della linea di universo.
In realtà, lo scostamento della linea di universo dell'utente dalla linearità può
anche essere dovuto alla curvatura dello spazio-tempo, ossia alla presenza di
un campo gravitazionale.
__________________________________________________________________
In questa δτ dovremmo in realtà includere anche le variazioni dovute al moto proprio e al
decadimento del periodo delle pulsar, che consideriamo costante durante ogni singola fase di
processo; questi ultimi sono comunque effetti da considerarsi di gran lunga inferiori a quelli
dovute alla accelerazione del ricevitore.
12
Una Pulsar millisecondo (MSP) è una pulsar con un periodo rotazionale compreso tra 1 e
10 millisecondi. Può essere visibile nella porzione dello spettro in microonde o nei raggi X.
13
16
Chiamando ϕ il suo potenziale, poniamo che 𝑎𝑎 sia dello stesso ordine di
grandezza del campo gravitazionale indotto dal Sole alla distanza di 1 AU14:
𝑎𝑎 = |∇ϕ| = 10-3 m/s2. Se consideriamo una velocità 𝑣𝑣 = 103 m/s otteniamo
ancora che, sempre per la (2.19), Δτmax = 10-2 s.
E’ possibile allora far riferimento a casi reali in fisica per i quali ha senso
l'ipotesi di linearità: limitatamente ad essi, la procedura di calcolo descritta
per il posizionamento di un utente nello spazio-tempo è dunque valida.
2.3.5 Influenza del campo gravitazionale
Oltre a condizionare l’andamento della linea di universo dell’osservatore, la
presenza di campi gravitazionali influenza anche la propagazione dei segnali
elettromagnetici nello spazio.
Al fine di un posizionamento reale nel Sistema Solare, nonostante il modello
matematico proposto si sviluppi sotto l’ipotesi di moto nello spazio-tempo
piatto di Minkowski, risulta comunque ovvio che si debba tenere conto degli
effetti del campo gravitazionale del Sole (come di qualsiasi altro corpo celeste
maggiore) e che vadano poste nuove condizioni al calcolo.
L’ordine di grandezza del campo gravitazionale statico relativo al Sole è di
circa 10−8 (
𝐺𝐺 𝑀𝑀𝑆𝑆
𝑐𝑐 2 𝑅𝑅
1 𝐴𝐴𝐴𝐴
𝑅𝑅
) e raggiunge valore massimo nelle sue vicinanze:
= 𝛿𝛿𝑆𝑆 ≈ 10−6 . Tale campo condiziona i tempi di arrivo degli impulsi
elettromagnetici provenienti dalle sorgenti: questo effetto risulta rilevante
solo nel caso in cui i tempi di arrivo subiscano variazioni di quantità
comparabili ai tempi di integrazione dell’algoritmo.
Immaginiamo allora che un utente stia viaggiando nello spazio con velocità 𝐯𝐯�
e direzione radiale 𝐫𝐫� rispetto al Sole (solo questa componente è di interesse).
__________________________________________________________________
1 AU (Astronomical Unit) = 149598000 kilometri. Esprimiamo la distanza in AU cosicché
ad una distanza pari a 1 corrisponda la posizione della Terra.
14
17
Gli effetti dovuti al suo moto in un intervallo di tempo δt sono espressi in
termini di variazioni in frazioni di periodo dei segnali: sapendo che
𝛿𝛿𝑆𝑆,𝑣𝑣 =
𝐺𝐺 𝑀𝑀𝑠𝑠
𝑐𝑐 2 𝑅𝑅 2
𝐯𝐯� ∙ 𝐫𝐫� 𝛿𝛿𝛿𝛿 è quindi possibile fissare un limite superiore al valore
accettabile di δt affinché l’effetto sia compatibile con la tolleranza richiesta
dall’algoritmo.
In ogni caso, la presenza di questi disturbi diventa trascurabile nel caso si
scelgano sorgenti a grande distanza nello spazio come, appunto, le pulsar.
2.4 Incertezze ed errori relativi
Dopo aver discusso gli errori sistematici legati al modello fisico che è alla
base del calcolo, esaminiamo ora gli errori relativi alla procedura in sé e alle
incertezze connesse alle variazioni stocastiche delle grandezze coinvolte nel
processo di posizionamento.
Consideriamo allora, nuovamente, il sistema (2.15). Mentre le componenti
della matrice A sono affette da errori sistematici, la misura delle fasi soffre di
errori casuali: è possibile calcolare il massimo errore relativo 𝛿𝛿𝑥𝑥̅ sulle
soluzioni 𝑥𝑥̅ quantificando gli errori su A e stimando tramite un’analisi
statistica l’incertezza sulla misura delle fasi.
2
Definiamo dunque una norma appropriata, per esempio ‖𝐴𝐴‖ = �∑𝑖𝑖,𝑗𝑗 �𝑎𝑎𝑖𝑖,𝑗𝑗 � e
‖𝑥𝑥̅ ‖ = �∑𝑖𝑖 |𝑥𝑥𝑖𝑖 |2 . Vale la seguente relazione:
dove 𝛿𝛿𝑥𝑥̅ =
‖∆𝑥𝑥̅ ‖
‖𝑥𝑥̅ ‖
, 𝛿𝛿𝛿𝛿 =
‖∆𝐴𝐴‖
‖𝐴𝐴‖
𝛿𝛿𝑥𝑥̅ ≤ 𝑘𝑘(𝐴𝐴)2 𝛿𝛿𝛿𝛿
(2.20)
e 𝑘𝑘(𝐴𝐴) è il numero di condizionamento del sistema
(2.15). Se supponiamo che gli errori relativi ∆𝑇𝑇/𝑇𝑇 dei periodi e ∆𝑛𝑛𝑖𝑖 dei coseni
direttori siano più o meno gli stessi per tutte le sorgenti e in ogni direzione,
allora l’equazione (2.20) ci permette di scrivere:
∆𝑇𝑇 2 3
�
𝛿𝛿𝑥𝑥̅ ≤ 𝑘𝑘(𝐴𝐴) � � � + (∆𝑛𝑛)2 � .
𝑇𝑇
2
2
18
(2.21)
𝑘𝑘(𝐴𝐴) è sempre maggiore o uguale a 1 e, nel nostro caso, possiamo scrivere:
4
1
1
𝑘𝑘(𝐴𝐴) ∝
� 2 2 .
2
|det(𝐴𝐴)|
𝑇𝑇(𝑁𝑁) 𝑐𝑐
(2.22)
𝑁𝑁
Possiamo notare che l’errore relativo è minimo quando il determinante della
matrice A e i periodi sono massimi. Dal momento che le componenti spaziali
della matrice A sono i coseni direttori, il determinante è massimo quando è
massimo il volume individuato da questi vettori.
2.4.1 Geometric Dilution of Precision (GDOP)
Al fine di garantire una maggiore accuratezza al calcolo, è utile analizzare le
proprietà prettamente geometriche del sistema (2.15), in particolar modo le
posizioni angolari delle sorgenti dislocate nel cielo.
Faremo dunque riferimento ad una grandezza di fondamentale importanza
anche per i sistemi GPS: il GDOP, ovvero il Geometric Dilution of Precision.
Esso ci permette di valutare l’affidabilità del nostro set di quaterne, in
funzione della posizione nello spazio delle sorgenti, l’una rispetto all’altra.
Il GDOP è calcolabile tramite la matrice delle covarianze15 degli errori di
posizionamento. Tale matrice può essere espressa come:
cov(𝑥𝑥̅ ) = [𝐴𝐴𝑇𝑇 cov(𝑦𝑦�)𝐴𝐴]−1
(2.23)
Se gli errori nelle misurazioni delle differenze di fase sono scorrelati e
2
distribuiti in maniera Gaussiana, con media zero e varianza 𝜎𝜎(𝑁𝑁)
, la matrice
diventa:
2
2
2
2
cov(𝑥𝑥̅ ) = �𝐴𝐴𝑇𝑇 diag(𝜎𝜎(𝑎𝑎)
, 𝜎𝜎(𝑏𝑏)
, 𝜎𝜎(𝑐𝑐)
, 𝜎𝜎(𝑑𝑑)
)𝐴𝐴�
−1
(2.24)
__________________________________________________________________
La matrice delle covarianze rappresenta la variazione di coppie di variabili aleatorie in una
analisi statistica di un fenomeno, cioè rappresenta il modo in cui ogni variabile varia rispetto
alle altre.
15
19
Il GDOP è allora definito come:
GDOP = �Tr�cov(𝑥𝑥̅ )�
dove con “Tr” indichiamo la traccia16 della matrice.
(2.25)
Considerando ora il caso in cui le misurazioni delle fasi abbiano la stessa
varianza 𝜎𝜎 2 ed utilizzando la notazione in cofattori17 per scrivere
(𝐴𝐴𝑇𝑇 𝐴𝐴)−1 =
1
|det (𝐴𝐴)|2
(cof A)T (cof A) , possiamo esprimere il GDOP come:
GDOP =
σ
�Tr(cof A)T (cof A)
|det(𝐴𝐴)|2
(2.26)
Risulta anche qui fondamentale il ruolo del determinante di A al fine di
minimizzare gli errori: il GDOP è minimo quando gli angoli compresi fra le
direzioni relative alle sorgenti sono massimi.
2.4.2 Disposizione delle pulsar nello spazio
Avendo discusso la dipendenza dell’accuratezza del calcolo rispetto alle
proprietà geometriche del sistema, è utile sottolineare che la maggioranza
delle pulsar ad oggi scoperte è concentrata lungo il disco galattico, ovvero il
piano di simmetria della Galassia.
Questa distribuzione planare delle sorgenti è interessante al momento del
posizionamento perché pone un limite minimo al GDOP, causando la
presenza di un errore che, seppur piccolo, non è eliminabile.
__________________________________________________________________
In matematica, si definisce traccia di una matrice quadrata la somma di tutti gli elementi
della sua diagonale principale.
16
In algebra lineare, il cofattore descrive una particolare costruzione che è utile per calcolare
sia determinante e l’inversa di matrici quadrate.
17
20
Capitolo 3
Posizionamento con N>4 pulsar
Fino ad ora abbiamo considerato, al fine del calcolo, un numero minimo di
sorgenti pari a quattro: il perché di tale numero è dettato dal fatto che le
coordinate necessarie a localizzare un punto nello spazio sono appunto
quattro (tre spaziali ed una temporale).
E’ comunque molto sensato e conveniente utilizzare un numero N di sorgenti
maggiore: il metodo di calcolo rimarrebbe invariato, ma si applicherebbe ad
ogni possibile quadrupla contenuta in N e la posizione finale sarebbe
determinata come media dei risultati ottenuti per ciascuna quadrupla. E’
possibile, in questo modo, smorzare gli effetti dei disturbi casuali
sull’emissione dei segnali.
Inoltre, se una sorgente dovesse venire meno per qualsiasi motivo (ad
esempio nel caso di eclissi), la localizzazione non verrebbe interrotta.
3.1 Simulazione numerica
Al fine di valutare la bontà del metodo e di applicarlo ad un numero di
sorgenti superiore a quattro, abbiamo scritto in codice MATLAB un algoritmo
in grado di simulare la ricezione degli impulsi elettromagnetici e la
misurazione dei tempi di arrivo per ricostruire la traiettoria ellittica nota di
un punto materiale nello spazio (vedi Appendice C).
Si è dunque fatto riferimento a quindici millisecond pulsar18 reali supposte
__________________________________________________________________
18
Una pulsar millisecondo è una pulsar con un periodo rotazionale compreso tra 1 e 10 ms.
21
fisse nello spazio e i cui parametri principali, riportati nella Tabella 1, sono
stati presi dal Catalogo Pulsar ATNF [4].
I quadrivettori base 𝒇𝒇 di ogni sorgente sono stati ottenuti calcolando i coseni
direttori a partire dai parametri relativi alle coordinate ellittiche delle pulsar
scelte e ricorrendo alla formula (2.1), con N pari a 15. Si è assunto di
conoscere sia periodi che coseni direttori con un’accuratezza limitata alla
sola precisione numerica.
Ricevendo segnali da svariati emettitori, la posizione finale del ricevitore
deve essere calcolata come media dei risultati ottenuti per ciascuna
quadrupla q contenuta in N: è necessario dunque calcolare le combinazioni
𝑁𝑁
15
ℂN,k , con k=4. In totale, esse saranno 𝑄𝑄 = � � = � � = 1365 .
𝑘𝑘
4
Con l’obiettivo di minimizzare gli errori relativi, come visto in 2.4 e in 2.5,
abbiamo ritenuto opportuno scegliere, fra la totalità delle combinazioni Q ,
solamente le quaterne aventi le pulsar disposte geometricamente meglio
nello spazio, le une rispetto alle altre: per fare ciò abbiamo pensato di
calcolare il numero di condizionamento delle matrici chi, di componenti 𝒇𝒇(𝑁𝑁)
(vedi l’espressione 2.17), e di porre un limite al suo valore per selezionare le
migliori combinazioni.
Un valore del numero di condizionamento accettabile per il sistema in esame
è compreso fra 1 e 100: nel nostro caso abbiamo comunque imposto che
debba essere inferiore a 30, al fine di garantire risultati più precisi.
Per snellire il calcolo, abbiamo deciso infine di considerare un massimo di
quaranta quaterne fra quelle già selezionate.
Partendo a questo punto dalla conoscenza della traiettoria del ricevitore (un
moto ellittico uniforme sul piano (x,y), percorso ad una velocità angolare
costante e pari a quella media della Terra attorno al Sole)(Figure 3.1 e 3.2)
abbiamo simulato la ricezione degli impulsi: i loro ToA (tempi di arrivo) sono
stati ricavati numericamente per ciascuna quaterna intersecando la curva
parametrica nota con quattro famiglie di iperpiani paralleli fra loro,
corrispondenti ai segnali elettromagnetici provenienti dalle pulsar.
22
Figura 3.1: l’orbita ideale e nota del punto materiale, vista nel piano (x,y).
Figura 3.2: l’orbita ideale e nota del punto materiale, vista nel piano (x,y,z).
Ripercorrendo lo stesso metodo di calcolo presentato in 2.2.2 e dopo aver
impostato opportunamente l’origine del nostro sistema di riferimento, è stato
possibile ricostruire le orbite ellittiche per ognuna delle quaranta quaterne
scelte (Figure 3.3 e 3.4), raccogliendo in appositi vettori le coordinate
spaziali e la base dei tempi degli eventi di ricezione.
23
Figura 3.3: le quaranta orbite ricostruite dall’algoritmo, sul piano (x,y).
Figura 3.4: le quaranta orbite ricostruite dall’algoritmo, sul piano (x,y,z). Si nota lo
scostamento dal caso ideale sul piano z.
In Figura 3.4 si nota come il complesso delle orbite ricostruite presenti un
certo scostamento dall’orbita ideale sull’asse z: si tratta di un modesto errore
imputabile ad una disposizione nello spazio ancora non ottimale di alcune
quaterne.
24
Come anticipato, è necessario a questo punto mediare le soluzioni ottenute
per ciascuna quaterna al fine di ottenere un’unica orbita ricostruita. Tale
operazione è resa complicata dal fatto che ogni quaterna assume come tempo
di riferimento il periodo maggiore di una delle quattro pulsar di cui è
composta. Si ha dunque che la scala temporale delle quaranta orbite riportate
in Figura 3.4 non è sempre la stessa.
Abbiamo ritenuto allora opportuno scegliere una base temporale adeguata, in
funzione della quale sia possibile effettuare un’interpolazione fra le
componenti spaziali dei vettori costruiti tramite le coordinate di ricezione.
Abbiamo assunto quindi come base dei tempi quella relativa alla quaterna
avente periodo minore in assoluto, e abbiamo eseguito un’interpolazione
polinomiale di primo ordine.
Le soluzioni ottenute sono riportate nelle Figure 3.5, 3.6 e 3.7: in rosso è
indicata la funzione interpolante le curve relative alle componenti spaziali
della traiettoria individuata da ciascuna quaterna.
Figura 3.5: curva interpolante e curve relative alla componente x della traiettoria individuata
dalle quaranta quaterne.
25
Figura 3.6: curva interpolante e curve relative alla componente y della traiettoria individuata
dalle quaranta quaterne.
Figura 3.7: curva interpolante e curve relative alla componente z della traiettoria individuata
dalle quaranta quaterne. Sono osservabili gli scostamenti su sull’asse z delle orbite ellittiche
ricostruite rispetto all’orbita ideale.
La soluzione ottimizzata è infine riportata in figura 3.8.
26
Figura 3.8: l’orbita del punto materiale ricostruita tramite l’algoritmo.
Si riscontra un’incertezza lungo l’asse z, molto piccola ed evidentemente
dipendente dalla bontà della scelta di alcune quaterne. Ricordiamo a tal
proposito che, come visto in 2.4.2, per quanto si cerchi di selezionare le
migliori costellazioni di pulsar, esse sono locate prevalentemente lungo il
piano galattico: questa particolare distribuzione influisce negativamente
sull’accuratezza del posizionamento.
Abbiamo ritenuto interessante, a questo punto, capire come varia l’errore
spaziale all’aumentare del numero delle quaterne, mantenendo sempre il
limite di 30 sul numero di condizionamento, con l’obiettivo di capire se
all’aumentare
delle
quaterne
considerate
si
ha
un
miglioramento
nell’accuratezza del calcolo e se, in tal caso, esiste una quantità soglia oltre la
quale i miglioramenti sono trascurabili.
Abbiamo diagrammato dunque l’errore in funzione del tempo all’aumentare
delle quaterne considerate, fino a considerarne un totale di quaranta: il
grafico ottenuto è rappresentato in Figura 3.9.
27
Figura 3.9: errore spaziale in funzione del tempo.
L’errore non tende a variare all’aumentare delle quaterne considerate: si
deduce dunque che le diverse combinazioni di quaterne non rappresentano
un insieme statistico e che, al fine di minimizzare l’errore, è importante
analizzare la qualità e bontà di ogni quaterna scelta, scartando ulteriormente
fra esse quelle che forniscono i risultati più dispersi.
28
Conclusione
Abbiamo qui presentato un interessante approccio matematico all’uso di
sorgenti di segnali elettromagnetici pulsanti per il posizionamento nello
spazio.
La procedura è completamente relativistica, non richiede sincronizzazione
fra i segnali provenienti dalle diverse sorgenti né stesse frequenze, e
permette di determinare la posizione di un utente rispetto ad un evento
arbitrario nello spazio tempo. Quest’ultimo aspetto rappresenta un limite
pratico di tale modello di calcolo in quanto l’utente, per poter ricostruire la
sua posizione nello spazio, deve conoscere le esatte coordinate del suo punto
di partenza. Ipotizzando una missione spaziale con partenza dalla Terra, il
computer connesso al ricevitore dovrà associare all’evento di ricezione
iniziale le coordinate della base terrestre da cui avviene il lancio, e non dovrà
essere spento per tutta la durata della missione. Uno spegnimento o la
perdita momentanea di segnale implicherebbero l’impossibilità di proseguire
con il posizionamento.
Nel presente lavoro di tesi abbiamo fatto riferimento ad impulsi
elettromagnetici emessi da millisecond pulsar. Sebbene tali corpi celesti
abbiano caratteristiche molto interessanti, quali un periodo di emissione
costante per lunghi periodi di tempo e una forte direzionalità, presentano
comunque un problema di rilevante importanza: la debolezza del loro
segnale. Questo difetto si traduce nella necessità di antenne e dispositivi di
ricezione all’avanguardia, molto ingombranti e molto costosi, che rendono
difficoltosa oggigiorno un’applicazione reale di tale sistema.
E’ comunque da considerare che lo stesso principio di calcolo può essere
applicato a sorgenti che non siano pulsar: si potrebbe pensare, ad esempio, di
29
porre degli emettitori di segnali pulsanti su corpi celesti e satelliti in orbita
all’interno del Sistema Solare, per un posizionamento all’interno dello stesso.
Un utente potrebbe dunque ripercorrere gli stessi calcoli affrontati nel
presente lavoro per ricostruire la sua traiettoria nello spazio, con l’accortezza
di conoscere il moto esatto di ciascun emettitore e aggiornare di continuo le
sue effemeridi.
In conclusione, il modello di calcolo qui descritto rappresenta, al netto di
errori e di incertezze già approfonditi e al netto di perfezionamenti futuri,
soprattutto in ambito tecnologico, un passo importante verso un sistema di
posizionamento completamente autonomo e relativistico nello spazio-tempo.
30
Riferimenti
[1] A. Tartaglia, ML. Ruggiero, E. Capolongo. A null frame for spacetime
positioning by means of pulsating sources. 2011.
[2] A. Tartaglia. Emission coordinates for the navigation in space. 2009.
[3] A. Tartaglia, ML. Ruggiero, E. Capolongo. A relativistic navigation system
for space. 2011.
[4] http://www.atnf.csiro.au/
[5] N. Ashby. Relativity in the Global Positioning System. 2003.
http://www.livingreviews.org/lrr-2003-1.
31