Teoria dei mezzi continui
Il modello di un sistema continuo è un modello fenomenologico adatto a descrivere sistemi
fisici macroscopici nei casi in cui le dimensione dei fenomeni osservati siano sufficientemente
grandi da poter trascurare la struttura particellare della materia.
Le configurazioni nello spazio di un corpo rigido sono descritte da un numeri finito di parametri
(sei: tre coordinate spaziali e tre angolari). Le equazioni che ne descrivono il moto formano un
sistema di equazioni differenziali ordinarie del tempo
I continui deformabili invece si possono pensare come sistemi con “infiniti” gradi di libertà e le
equazioni del moto assumono in generale la forma di equazioni differenziali alle derivate
parziali (spazio e tempo) .
Quello che accomuna la descrizione dei sistemi continui è l’assunzione che esista una
funzione di densità ρ (x, t) tale che la massa di una porzione D del sistema sia esprimibile
tramite la
M ( D ) = ∫ ρ (x, t )dV
D
(2.1)
dove dV indica l’elemento di volume nello spazio.
Questa assunzione è evidentemente in contrasto con la struttura atomica della materia.
Oggi la trattazione della materia come un sistema continuo è considerata come una
assunzione puramente fenomenologica che permette di studiare l’equilibrio e il moto di corpi
macroscopici su scale molto maggiore di quelle atomiche.
Equazioni macroscopiche della dinamica dei fluidi
A livello macroscopico è possibile studiare la dinamica dei sistemi continui utilizzando
due diversi tipi di descrizione, il metodo euleriano e il metodo lagrangiano.
Il metodo euleriano descrive l’andamento temporale delle grandezze
macroscopiche in un dato punto dello spazio, e utilizza derivate euleriane ∂/∂t,
indipendenti dalle derivate spaziali.
Il metodo lagrangiano descrive invece l’andamento temporale delle grandezze
seguendo le traiettorie degli elementi fluidi, per cui le derivate lagrangiane d/dt
tengono anche conto del moto del fluido.
La 'velocita lagrangiana, adottata tipicamente
nella descrizione del moto di un corpo ben
individuato nello spazio (come una particella
singola), è una grandezza vettoriale funzione del
tempo v(t) che e’ attribuita ad un corpo, ovunque
esso si trovi. Il vettore velocità è dunque solo
funzione del tempo e la derivata (totale) rispetto
al tempo della velocità lagrangiana a = dv/dt
fornisce l'accelerazione a cui e sottoposto quel
determinate elemento di fluido ad un istante
dato.
In meccanica dei fluidi, non è sempre possibile individuare il moto di un elemento di
fluido su una traiettoria perché si confonde con quella di altri elementi. E’ tuttavia
possibile misurare in un certo punto dello spazio la velocità degli elementi di fluido che
passano per quel punto. Il vettore velocità eurleriana è pertanto una funzione
vettoriale v(x,t) dello spazio e del tempo che e rappresenta la velocità con cui gli
elementi del fluido transitano all'istante t per il punto di coordinate x (x1,x2,x3).
: a derivata parziale rispetto al tempo di questa
L
velocità indica come varia la velocità degli elementi
di fluido che all‘ istante t transitano per il punto
P(x1,x2,x3), individuato dal vettore x nel sistema di
coordinate, rispetto alla velocità di altri elementi di
fluido che in istanti vicini transitano per lo stesso
punto x. Questa derivata parziale rispetto al tempo
nulla ha a che vedere, in generale, con l’
accelerazione a cui sono sottoposti gli elementi di
fluido che all'istante t si trovano nel punto x.
x3
x
P(x1,x2,x3)
O
x1
x2
Se risulta, per esempio, che la ∂v/∂t è identicamente nulla, ciò significa che il moto non
varia nel tempo (moto del fluido stazionario) in quel punto, ma non significa
necessariamente che gli elementi del fluido in quel punto non sono sottoposti ad
accelerazione
Le due velocità, 'lagrangiana' e ed 'euleriana', sono evidentemente numericamente
uguali (nel senso che se un certo elemento di fluido ad un istante t si trova in un punto
x con velocità (lagrangiana) v(t), questo stesso valore coincide con la velocità
(euleriana) del fluido nel punto x all'istante t : v(x,t), ma le due rappresentazioni hanno
una dipendenza funzionale diversa.
Nelle equazioni del moto dei fluidi, si presenta la necessita di dover esprimere l‘
accelerazione degli elementi del fluido, avendo a disposizione la velocità euleriana e
non quella lagrangiana. Possiamo valutare questa accelerazione in base al limite per
t -> 0 del rapporto incrementale delle velocità fra gli istanti t e t + dt degli elementi di
fluido che all'istante t si trovano in r e all'istante t+ dt si sono spostati nel punto x+v dt:
1
[ v(x + v∆t , t + ∆t ) − v(x, t )]
∆t →0 ∆t
a = lim
(2.2 )
Eseguendo il differenziale totale si riconosce che questo limite dà la derivata totale
della velocità euleriana rispetto al tempo
dv
∂
= [ + ( v ⋅ ∇)]v
dt ∂t
con
(2.3)
la ragione intuitiva di questo fatto è che per eseguire correttamente questa operazione
di derivata occorre seguire l'elemento di fluido nel suo moto
I concetti espressi a proposito della velocità lagrangiana ed euleriana, valgono per
qualsiasi altra funzione scalare o vettoriale dello spazio e del tempo Q(x,t). , di cui
vogliamo calcolare la variazione nel tempo in un punto fisso dello spazio oppure i un
punto mobile col fluido.
La derivata lagrangiana definita come:
2.4)
sviluppando Q(x + uδt, t+δt) in serie di Taylor al prim’ordine:
2.5)
definisce il legame tra i due tipi di derivata:
2.6)
Consideriamo per esempio la densità di massa ρ(x,t). La derivata parziale rispetto al
tempo ∂ρ/∂t esprime la variazione di densità di elementi di fluido che in istanti successivi
transitano per il punto x. La derivata totale :
'
dρ
dt
=
∂ρ
∂t
+ u ⋅ ∇ρ
2.7)
indica la variazione di densità di un ben individuato elemento di fluido, seguito nel suo
moto.
Cinematica dei fluidi
L ‘ adozione del punto di vista euleriano, richiede una
ridefinizione dei parametri cinematici usati, che viene
brevemente descritti in questo capitolo. Nella
descrizione euleriana, viene definito nello spazio un
“campo di velocità” ossia viene assegnato il
valore del vettore velocità v di un elemento fluido in
ogni punto dello spazio e in ogni istante di tempo,
rispetto ad un sistema di riferimento (cartesiano
ortogonale) fisso (fig. 5.1):
v(x; t) = u(x; t)i + v(x; t)j + w(x; t)k
(2.8)
Figura 5.1: Sistema di riferimento cartesiano
per l’analisi cinematica
dove x = (x; y; z) rappresenta il vettore posizione.
Il vettore velocità è definito in un riferimento cartesiano come
Ognuna di queste componenti ha una sua variazione spaziale.
Pertanto occorrono quindi 9 quantità per definire la variazione
spaziale di v .
L’entità che ne risulta è un tensore di 9 componenti scalari :
Possiamo descrivere la variazione spaziale di V anche da un
altro punto di vista, osservando che V può variare secondo le 3
componenti cartesiane.
che, utilizzando la notazione di Einstein e ridefinendo x = (x1; x2; x3) e V = (u1; u2; u3) si
puo’ anche
Si puo’ dimostrare che il tensore sij , con cui rappresentiamo la variazione spaziale di V ,
puo’ essere sempre scomposto nella somma di un tensore simmetrico eij e di un tensore
antisimmetrico rij :
(2.9)
in cui abbiamo definito:
(2.10)
(2.11)
Parametri cinematici
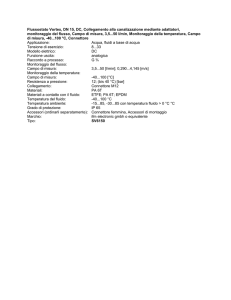
Traiettoria, linea di flusso, traccia
La traiettoria di un elemento fluido in un intervallo di
tempo, tra il tempo t1 e il tempo t2. è il luogo dei punti
occupati dal suo baricentro nell’intervallo di tempo
t1 < t < t2
Traiettoria
Una linea di flusso, o linea di corrente, al generico
istante t, è ogni linea che in ogni punto è tangente al
vettore velocità considerato a quell’istante, V (x; t) La
linea di flusso istantanea `e quindi una linea integrale del
campo
(2.12)
In condizioni stazionarie, in cui il campo di velocità è
indipendente dal tempo, traiettoria e linea di flusso
coincidono.
La traccia, all’istante t2, è il luogo delle particelle fluide
che, nell’intervallo di tempo t1 < t < t2, sono transitate
dallo stesso punto xo (fig. 5.4). Nel caso stazionario, la
traccia coincide anch’essa con la traiettoria e la linea di
flusso.
Linea di flusso
Traccia
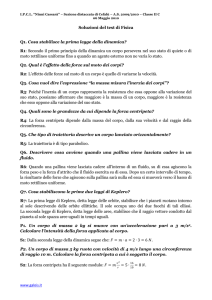
Possibili moti di un fluido
I possibili tipi di moto sono: traslazione, rotazione, dilatazione e deformazione angolare.
Considerato un elemento di fluido di geometria cubica e
volume Ω, la traslazione é un moto rigido in cui non varia
né la forma né il volume dell’elemento, associato a un
campo di moto uniforme. E’ facile verificare che, se la
velocità è spazialmente uniforme, tutti i vertici dell’elemento
quadrato in figura subiscono lo stesso spostamento
nell’intervallo di tempo dt
La dilatazione `e una variazione di volume
dell’elemento senza deformazione (fig. 5.6).
Questo tipo di moto corrisponde ad un campo di
velocità tale che:
(2.12)
Infatti, indicando con dx e dy la lunghezza dei lati
dell’elemento abbiamo:
(2.13)
(2.14)
Considerando piccolo l’elemento di fluido e trascurando gli infinitesimi di ordine
superiore
(2.15)
La variazione di volume nell’intervallo di tempo dt vale quindi:
:
(2.16)
Se consideriamo tale variazione in termini relativi, riferita al volume iniziale Ω(t) = Ω
(2.17)
da cui
(2.18)
e per un flusso tridimensionale
(2.19)
Che permette di interpretare fisicamente la divergenza del vettore velocità come una
variazione di volume per unità di volume e unità di tempo.
; (2.20)
y
∂u
dx = d
dt
∂y
dθ2
La rotazione rigida dell’elemento fluido `e definita come
la velocità angolare media di due superfici dell’elemento
perpendicolari tra loro. Nel nostro esempio, definendo
con dθ1 e dθ2 le variazioni angolari dei lati dx e dy
coincidenti con gli assi (fig. 5.7), otteniamo:
d
∂v
il cui valor medio risulta:
(2.21)
d
dθ1 dy = d ∂x dt
dθ1
che corrisponde alla parte antisimmetrica del tensore sij per questo campo di moto
bidimensionale ed esprime una rotazione rigida con velocità angolare Ωz attorno all’asse
perpendicolare al piano del moto.
Se il campo di moto `e tale per cui l’elemento fluido non ha rotazione, il moto si dice
irrotazionale.
Per un flusso fluido tridimensionale tale espressione si generalizza in:
(2.22)
che fornisce la definizione fisica del rotore di V
x
Deformazione angolare
L’altro tipo di moto possibile con il campo di velocità che
abbiamo preso in considerazione é quello di
deformazione angolare. definita come la media
della differenza delle velocità angolari di due superfici
dell’elemento perpendicolari tra
loro. Ricordando la (2.20), nel nostro esempio questa
differenza risulta in:
2.23)
Espressioni analoghe si ottengono se il moto di
scorrimento avviene negli altri piani coordinati:
esse costituiscono le componenti non diagonali del
tensore simmetrico (2.9) che permette di descrivere in
modo unitario, come vedremo nel seguito, sia la
dilatazione che la deformazione.
Da un punto di vista più generale. consideriamo un generico punto Q di coordinate dxi
nell’intorno di primo ordine del punto P, in cui abbiamo collocato l’origine del sistema di
riferimento. La velocità in Q é data da:
2.24)
in cui V é la velocità in P e abbiamo utilizzato una notazione tensoriale nota come
notazione einsteniana, che implica la sommatoria degli indici ripetuti, ovvero
2.25)
La componente di VQ lungo il generico asse xi é quindi data da:
2.26)
Ricordando la (5.2.2) e la scomposizione sij = eij + rij risulta
2.27)
in cui:
-ui rappresenta la traslazione
-rijdxj = 1/2ω x PQ rappresenta la rotazione rigida - eijdxj rappresenta l’insieme di deformazione e
dilatazione
Il tensore doppio eij , definito dalla (5.2.3) prende il
nome di tensore velocità di deformazione e in
componenti cartesiane si scrive come:
la cui traccia (sommatoria degli elementi diagonali)
rappresenta r¢V .
2.28)