A
pplicazioni
MEMS
Studio applicativo
su trasduttore accelerometrico
3D MEMS
Andrea Corgiatini
MEMS sono micromacchine integrate su silicio che possono essere
utilizzati sia come sensori sia come
veri e propri attuatori.
Nella loro versione come sensori possono essere utilizzati per rilevare accelerazioni, angoli e pressioni. Essi trovano
applicazione in campo automotive, medico, realtà virtuale, guida e ricerca automatica, stabilizzazioni di masse in movimento (giroscopi), rilievo di velocità e
posizione, di supporto ai GPS nei brevi
periodi in cui il segnale satellitare svanisce o risulta insufficiente, e così via. Le
loro caratteristiche di basso costo, integrazione, consumi ridotti, li rendono
interessanti per il mercato consumer per
tutto ciò che la fantasia dei progettisti
riuscirà a realizzare ovunque sia implicato un movimento da misurare o realizzare (in scale millimetriche).
Nella loro versione come attuatori, si
pensi per esempio alla tecnologia DLP
(Digital Light Processing) usata per i
video proiettori in cui micro specchi
integrati sono comandati per formare
l’immagine oggetto della proiezione
oppure le stesse testine Ink-jet delle
stampanti - solo per citarne due esempi
In questo articolo viene descritto
l’uso del trasduttore accelerometrico a 3 assi
LIS3L02AS4 di STMicroelectronics
ed evidenziate le possibili applicazioni pratiche
dal punto di vista fisico-meccanico
I
78
che hanno già da tempo pervaso il mercato consumer - entrano nella stessa
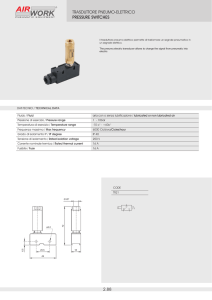
categoria di dispositivi microelettromeccanici su silicio. Nella figura 1 viene
riportato un grafico relativo al posizionamento della tecnologia MEMS in relazione alla tecnologia e ai mercati.
Fig. 1 - Posizionamento dei MEMS in
relazione alle tecnologie e ai mercati
(da ST Journal OF Research - Volume
3 - Number 1 – MEMS luglio 2006)
Attuali usi degli accelerometri
Gli accelerometri sono impiegati in
campo automobilistico nella sicurezza
attiva (ABS) e passiva (centraline airbag) e stabilizzazioni di vario genere,
ELETTRONICA OGGI 370 - SETTEMBRE 2007
A
pplicazioni
MEMS
aiuto nella partenza in salita, e così via;
nei game controller (recente successo
del Wii di Nintendo), negli hard disk
(per il distacco rapido della testine di
lettura e scrittura in caso di urti e cadute), per rilevare il tilt (inclinazione) e il
movimento (per esempio nei cellulari
per adeguare il display e le scelte dell’utente all’inclinazione dello stesso).
Caratteristiche del trasduttore
accelerometrico x-y-z
LIS3L02AS4
Di seguito vengono delineate le principali caratteristiche di questo trasduttore
a 3 assi indipendenti di tipo lineare (dal
data sheet del trasduttore):
1) sensibilità impostabile a ±2G oppure
±6G;
2) alimentazione in continua compresa
tra 2,4V e 3,6V;
3) risoluzione di 0,5mG sopra i 100Hz di
banda;
4) funzioni di self test e power down;
5) la risposta dei 3 canali rapportata
all’alimentazione (sia l’ampiezza sia la
sensibilità).
Nel datasheet di ST viene riportato lo
schema a blocchi interno descritto in
figura 2.
Per ogni asse, le accelerazioni agiscono
su micro masse sospese libere di muoversi lungo la rispettiva direzione, ancorate in un punto fisso. Tali micro masse
fanno parte di una capacità variabile, in
particolare ne rappresentano l’armatura
in grado di spostarsi in base alle accelerazioni, le quali divengono variazioni di
capacità ad esse proporzionali, dell’ordine di alcuni fF rispetto al valore di alcuni pF con accelerazioni nulle. Alle massime accelerazioni si ottengono variazioni fino a 100fF. La variazione capacitiva che trasporta l’informazione di interesse è elaborata tramite una circuiteria
80
di tipo differenziale che all’esterno
viene vista in modo single ended.
Il segnale proveniente dai sensori è multiplexato e immesso in un amplificatore
di carica a basso rumore, poi demultiplexato e dato a 3 distinti S&H che
comunicano con le rispettive uscite x-yz. L’amplificatore di carica lavora a
200KHz, mentre i 3 S&H lavorano a
66KHz.
Il chip ha subito una taratura in fabbrica
sulla sensibilità e il valore a 0G, quindi non
c’è bisogno di ulteriori calibrature per
l’uso. Il costruttore consiglia di disaccoppiare le uscite x-y-z con inseguitori rea-
Fig. 2 - Schema a blocchi del trasduttore accelerometrico x-y-z LIS3L02AS4
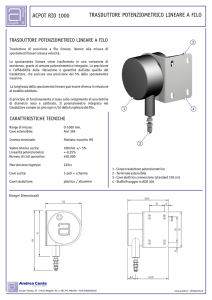
Fig. 3 - Layout del trasduttore con filtro
PB in uscita e orientazione degli assi
ELETTRONICA OGGI 370 - SETTEMBRE 2007
A
pplicazioni
MEMS
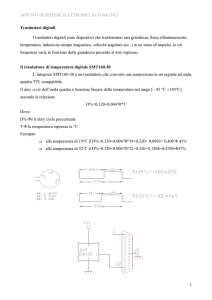
Fig. 4 - Posizione del trasduttore rispetto al suolo
e relative risposte per
asse, Vdd=3,3V
lizzati tramite operazionali, preceduti da
un semplice filtro RC passa basso per
canale, con la raccomandazione di progettare il filtro dalla DC alla frequenza
max di 1,5KHz (frequenza di risonanza
meccanica del trasduttore). La resistenza R è quella dello stadio di uscita dai
S&H e la minima capacità C esterna sia
pari a 320pF. Nelle figure 3 e 4 vengono
riportate rispettivamente il layout del
trasduttore con filtro PB in uscita e
orientazione degli assi e la posizione
del trasduttore rispetto al suolo e le
relative risposte per asse con Vdd pari a
3,33 V. Di seguito viene riportato uno
studio realizzato dall’autore con la collaborazione dell’ISIS “E. Fermi” di
Bibbiena (AR).
Schema elettrico
per l’acquisizione del segnale
del trasduttore
Nella figura 5 viene riportato lo schema
elettrico utilizzato per acquisire il
segnale dal trasduttore. Quest’ultimo,
ospitato in un package tipo SO24, è
ELETTRONICA OGGI 370 - SETTEMBRE 2007
stato montato su una piccola basetta
collegata con un flat cable di circa 1m
ad un’altra basetta in cui è posta l’alimentazione e un condizionamento di
segnale. Il prossimo sviluppo prevede
la comunicazione di tipo wireless dei
dati del trasduttore.
Il segnale condizionato e costituito da
tre tensioni comprese tra 0 e 3,3V relative alle 3 accelerazioni X-Y-Z devono
essere inviati alla scheda di interfaccia
per PC che ha solo 2 ingressi analogici:
il problema è stato superato operando
con un mux analogico e sincronizzando
opportunamente la scheda di interfaccia.
Descrizione di dettaglio
L’elettronica è alimentata da una tensione stabilizzata di 12Vcc e per garantire
una stabilizzazione della tensione al trasduttore (la cui risposta è influenzata
proporzionalmente) si è utilizzato un
integrato tipo 7805 con uno stadio successivo a diodo zener. In questo modo è
possibile ottenere la tensione di 3,3V
raccomandata da ST (NB: assorbimen-
to di LIS3L02AS4 max=1,5mA). Il trasduttore è così impostato:
- modo di funzionamento normale (pin
9 ST a massa);
- modo di funzionamento normale nei
riguardi del consumo (pin 11 PD a
massa);
- scala di misura a ±2G (pin 13 FS a
massa).
Il segnale proveniente dal trasduttore
arriva con il flat cable alla basetta in cui
tre filtri passa basso del 1 ordine tagliano a circa 14,5Hz: essi sono costituiti
dalla Rout del chip (tipica Rout=110Kohm) e dalla capacità esterna
da 100nF. Seguono 3 AO tipo LM 358
collegati come voltage follower. Il
segnale Z è inviato direttamente alla
scheda di interfaccia (tipo Velleman
8055) al canale analogico CH2 mentre
l’altro canale analogico CH1 riceve in
multiplex i segnali X e Y attraverso il
mux analogico tipo CD 4051, pilotato
dal segnale SELECT (1 bit) proveniente dall’uscita OUT1 della scheda di
interfaccia.
81
A
pplicazioni
MEMS
Si è reso necessario un segnale di reazione sulla scheda di interfaccia, dall’uscita di tipo digitale OUT2 verso l’ingresso digitale della stessa I1, che permetta al programma di gestione di ricevere il feedback di avvenuta commutazione del mux (difatti OUT2 riproduce
OUT 1), quindi acquisire la coppia di
valori analogici Z e X o Y, quindi di commutare di nuovo OUT1 e OUT2 in loop
continuo.
Software di gestione
e acquisizione:
descrizione generale
Il programma di gestione e acquisizione è stato scritto in VB.net 2003 e usa le
librerie fornite dal costruttore della
scheda di interfaccia, contenute nell’annessa dll, per procedere all’acquisizione dei 3 segnali analogici che la stessa
82
scheda provvede a digitalizzare e fornire al PC via USB. Allo stato di revisione
attuale il programma provvede a:
1) in base ad un input utente iniziale, si
imposta la velocità di acquisizione dei
dati sui 3 canali x-y-z (max 15,6 Hz con
la scheda utilizzata, ogni canale fornisce 8 bit di risoluzione su una scala 05V) e il numero di campioni per canale
che si desiderano;
2) visualizzazione “live” su progressbar
delle 3 letture corrispondenti ai segnali
di accelerazione x-y-z;
3) un calcolo, leggermente approssimato, della accelerazione esterna in modulo, cui il trasduttore è sottoposto, visualizzato su trackbar. Per accelerazione
esterna, si intende quando il sensore
risulta in movimento, avendo “tolto”
l’effetto dell’accelerazione gravitazionale, si veda oltre;
Fig. 5 - Schema elettrico utilizzato
4) la proiezione rispetto a x-y-z dell’accelerazione esterna cui è sottoposto il
trasduttore;
5) il calcolo “live” dell’angolo ϕ rispetto
ai versori x e y e dell’angolo θ rispetto al
piano x-y delle componenti dell’accelerazione totale;
6) La registrazione su file della serie
tripla di campioni di accelerazione
acquisiti.
Ove: xms2(i), yms2(i),zms2(i) rappreELETTRONICA OGGI 370 - SETTEMBRE 2007
A
pplicazioni
MEMS
Software di gestione e acquisizione: analisi di dettagli salienti
Di seguito, si evidenziano alcune righe di codice di particolare importanza.
Misura dell’accelerazione espressa in m/s^2 – per singolo asse
x(i) = datax * 5 / 256 ‘datax, datay, dataz: valori correnti in unità 0-255 corrispondenti alle letture X-Y-Z
y(i) = datay * 5 / 256 ‘x(i),y(i),z(i): vettori accelerometrici per ogni canale, in volt, scala 0-5v
z(i) = dataz * 5 / 256
xms2(i) = (x(i) - gx0 + offset_x) / gain / sensibility_x * 9.8 ‘accelerazione X in m/s^2
yms2(i) = (y(i) - gy0 + offset_y) / gain / sensibility_y * 9.8 ‘accelerazione Y in m/s^2
zms2(i) = (z(i) - gz0 + offset_z) / gain / sensibility_z * 9.8 ‘accelerazione Z in m/s^2
sentano 3 vettori contenenti rispettivamente i valori di accelerazione per
canali x-y-z espressi in m/s^2. Tali
valori si ottengono con la formula riportata sopra, tenendo conto che:
Tali valori dipendono dal sensore e dal-
ponendo l’asse del sensore “ortogonale” rispetto alla gravità, tenendolo
fermo (come indicazione ci si può riferire alla lettura dell’asse parallelo alla
gravità che deve dare la max lettura.....); la prova effettuata, con la preci-
gx0 = 2.4
gy0 = 2.36 ‘offset a G=0 per ogni asse,
in volt, sulla scheda di acquisizione
gz0 = 2.53
l’elettronica di acquisizione, sono leggermente differenti per ogni asse, e
vanno “accuratamente” rimisurati se il
trasduttore deve essere sostituito. La
valutazione di tali valori è stata eseguita
per ogni canale nel seguente modo:
1) lettura della risposta a 1G—-> Vmax;
2) lettura della risposta a -1G—-> Vmin;
3) valore di offset a G=0—-> (VmaxVmin)/2=gi0;
4) verifica del valore stimato “gi0”
sione dei rilievi (ed gli 8 bit a disposizione), ha praticamente confermato la
linearità del trasduttore.
of fset_x, of fset_y,of fset_z: valori
modificabili “run time” tramite trackbar,
servono per la regolazione fine in base
al movimento o posizione del trasduttore e ai risultati che sono visualizzati.
Hanno tutti valori standard pari a zero,
possibile regolazione +-0.1, step 0.01.
gain: guadagno introdotto dallo stadio
di condizionamento =1,4545 nel nostro
caso (impostazione sulla scheda di
interfaccia per usare tutta la dinamica 05v del convertitore ADC).
sensibility_x,sensibility_y,sensibility_z: valore di sensibilità per ogni asse.
Il data sheet riporta come valore standard Vdd/5: nel nostro caso 3.3/5=0,66
V/G (volt/accelerazione di gravità).
Sempre nell’ottica di ottenere il miglior
valore possibile “reale” riferito all’elettronica ed a quel particolare trasduttore, è stata fatta per ogni asse tale misura
e relativo calcolo:
Sensibility_i=(ViGp-ViGn)/2/gain
ove:
ViGp= valore rilevato di tensione sull’asse i-esimo, dopo la scheda di interfaccia
e quindi direttamente a video, con gravità parallela e a favore dello stesso
asse.
ViGn= valore rilevato di tensione sull’asse i-esimo, dopo la scheda di interfaccia
e quindi direttamente a video, con gravità parallela e a sfavore dello stesso
asse.
Tale formula permette di calcolare l’ac-
Fig. 6 - Varie posizioni del trasduttore
rispetto alla gravità G e relativi angoli
θeϕ
84
ELETTRONICA OGGI 370 - SETTEMBRE 2007
A
pplicazioni
MEMS
Con il prototipo in questione, sono stati ottenuti i seguenti risultati:
sensibility_z = 0.666
sensibility_x = 0.6583 ‘ sensibilità sul trasduttore, in V/G
sensibility_y = 0.6463
Fig. 7 - Screen shot del programma di gestione e acquisizione: le barre di scorrimento in blu sono i valori in
tensione rilevati di X-Y-Z (campionamento a circa 15,6
hz per canale, 8 bit); il trasduttore è fermo, per cui è
interessato dalla sola gravità
Misura dell’accelerazione espressa in m/s^2 : modulo
aT = (xms2(i) ^ 2 + yms2(i) ^ 2 + zms2(i) ^ 2) ^ 0.5 ‘ modulo accelerazione totale in m/s^2 comprensiva della gravità
celerazione complessiva cui è sottoposto il trasduttore, quindi c’è la gravità e
accelerazioni dovute alle traslazioni ma
non accelerazioni dovute alle rotazioni
su se stesso, per cui il trasduttore è
cieco (come è abbastanza logico supporre).
Il calcolo dell’angolo θ in gradi (cioè
lo ϕ rispetto all’asse x) presenta qualche problema: la formula è essenzialmente fi=atan (ay/ax), ove ay e ax rappresentano rispettivamente i valori di
accelerazione rilevati lungo gli assi.
Il calcolo:
1) risulta indeterminata quando i valori
ay=ax= 0 e in pratica quando risultano
se z all’accelerazione: se così fosse i valori
di ax e ay sarebbero pressoché nulli. I
valori di soglia prescelti sono per lo meno
una differenza pari a 5° rispetto alla “non
perpendicolarità” a cui è stata aggiunta la
condizione che il valore di ax debba essere almeno pari a 0,4 m/s^2.
Il punto 2) è stato risolto semplicemen-
Misura dei 2 angoli “fi” e “teta”
teta = Acos((zms2(i) / aT)) * 180 / pigreco
If (Abs(teta - 180) > 5 And teta > 5) Then ‘solo se teta <> 0 oppure 180 gradi (almeno 5 gradi di differenza)
If Abs(xms2(i) - 0.4) > 0 Then
fi = Atan((yms2(i) / xms2(i))) * 180 / pigreco
End If
If xms2(i) < 0 Then fi = fi + 180 ‘ correzione quadrante 2 e 3
Else
TextBox15.Text = “indeterminato”
fi = 90 ‘ corrisponde ad indeterminato
End If
l’angolo del vettore accelerazione rispetto al piano x-y di un sistema di riferimento solidale con il trasduttore) non
presenta particolari problematiche.
Il calcolo dell’angolo ϕ (la componente
del vettore accelerazione che si proietta
sul piano x-y del traduttore, fa un angoELETTRONICA OGGI 370 - SETTEMBRE 2007
troppo “piccoli” (in particolare per il termine a denominatore ax) dando luogo a
errori di calcolo numerico;
2) ϕ va corretto nel 2° e 3° quadrante.
Il punto 1) è stato superato eseguendo il
calcolo dell’arco tangente solo se θ segnala che il sensore non sia parallelo con l’as-
te costatando che ϕ deve essere aumentato di 180° se i valori ax risultano negativi. Nel caso che ϕ non sia valutabile, è
mostrato a video “indeterminato” e memorizzato nella variabile il valore di 90°.
Nella figura 6 vengono riassunte le varie
posizioni del trasduttore rispetto alla
85
A
pplicazioni
MEMS
gravità G e relativi angoli θ e ϕ, mentre
nella figura 7 viene proposto lo screen
shoot del programma di gestione e
acquisizione.
Analisi dei risultati
L’apparecchiatura di acquisizione utilizzata presenta delle caratteristiche che
limitano in partenza la precisione dei
risultati. Inoltre per ottenere le informazioni di velocità e posizione occorre
integrare i valori di accelerazione, con il
calcolo numerico che tenderà ad accumulare nel tempo l’errore, soprattutto
nel calcolo della posizione. Le fonti di
errore che influenzano il calcolo di velocità e posizione associati al trasduttore
sono 3:
1) errore di quantizzazione;
2) offset G=0;
3) calcolo numerico associato alle integrazioni.
Errore di quantizzazione:
stima dell’errore introdotto
dall’interfaccia elettronica
I campioni sono a 8bit riferiti ad un
intervallo 0-5V (passo di quantizzazione
5/256=19,5 mV, errore di quantizzazione +- 9,77 mV). Il data sheet del trasduttore riporta una sensibilità di 0,72V/G,
cioè 73,4mV/(m/s^2) (NB: è un valore
medio) ——> tale segnale viene amplificato di 1,4545 volte e diviene
106,8mV/m/s^2)——>l’errore di quantizzazione (stima media per ogni asse)
equivale a sbagliare di+- 0,0915 m/s^2
per ogni campione (cioè ogni 1/15,6
s)——> quindi, supponendo tale errore
“una accelerazione costante” troviamo
che dopo 1 secondo S=0.5*a*t^2=+-4,6
cm—-> dopo un minuto: +-165m—->
cioè dopo un minuto, solo in base all’errore di quantizzazione il trasduttore
assume una posizione che sta dentro
una sfera di raggio 165m. Tale stima
86
sconforta, ma si possono fare le seguenti considerazioni:
1) bisogna rapportare il valore assoluto
di tale errore di posizione ai valori effettivi di moto dell’oggetto, ottenendo un
errore relativo, che comunque se il
moto risulta uniforme, tende ad aumentare nel tempo;
2) per limitare l’errore di quantizzazione, ineliminabile, occorre aumentare il
numero di bit: per ogni bit in più di
quantizzazione l’“accelerazione” di errore che ne deriva si dimezza. Se utilizzassimo una conversione a 16 bit, ripetendo
la stima fatta sopra, otterremmo dopo
un minuto un’incertezza pari a +165/256=+-0,64m, con un’”accelerazione” di errore di quantizzazione pari a +3,57E-4m/s^2
Errore dovuto al valore a G=0:
errore di offset gravitazionale
Il trasduttore risponde alle sollecitazioni
che lo accelerano con una tensione proporzionale; quando l’asse preso in considerazione non subisce accelerazione,
si ha una risposta che il data sheet pone
= Vdd/2 +-10%, fornendo anche il relativo diagramma di dispersione statistica
per ogni asse di tale valore, indicato
come offset G=0. Risulta evidente che
occorre fare una taratura specifica per
ogni asse e trasduttore con cui si abbia
a che fare, e che ciò sia critico.
Nel nostro caso, il valore di offset G=0
sono risultati pari a:
Asse X = 2.4V
Assey = 2.36V
Assez = 2.53V
A fronte di un risultato atteso pari a
2,4V. Per ottenere delle informazioni su
velocità e posizione, senza ancora entrare in dettaglio, le uscite in tensione dei
tre canali X-Y-Z vanno diminuite dei
rispettivi valori di offset a G=0, poi pro-
cedere ai calcoli e integrazioni. Come
già osservato nella stima dell’errore di
quantizzazione, per ogni 106,8mV
abbiamo 1m/s^2 di accelerazione corrispondente: quindi errare di soli 10mV
tale stima a G=0 implica l’introdurre
un’”accelerazione” di errore corrispondente a 10/106,8 =0,0936m/s^2, che
dopo un minuto comporterebbe un’incertezza stimata pari a+-168m.
Per ricondurci ad un errore confrontabile con quello stimato con una conversione ADC a 16bit (”accelerazione” di
errore di quantizzazione pari a +-3,57E4m/s^2), occorrebbe la conoscenza del
valore a G=0 entro +-5000/2^17=+0,0381mV.
Precedentemente abbiamo indicato il
metodo seguito per la valutazione dei
valori a G=0 per ogni asse, e per raggiungere l’accuratezza di +-0,0381mV
dovremmo appunto avere per lo meno
un convertitore a 16bit.
L’ostacolo è parzialmente aggirabile dal
momento che una prima taratura si
ottiene con il metodo già indicato, mentre quella fine può essere svolta “runtime” agendo su delle regolazioni “fini”
per canale, (Fig. 7) e ponendo il trasduttore fermo ma in varie posizioni
angolari si deve avere:
aT = abs((xms2(i) ^ 2 + yms2(i) ^ 2 +
zms2(i) ^ 2) ^ 0.5 -9,8)=0, come indicato in figura 7 nella quarta barra a partire dall’alto. Nella figura 7 viene mostrato un valore numerico pari a 0.1366671
m/s^2 invece che un valore pari a 0,
visto che il sensore è fermo.
Considerazioni
di tipo fisico-meccanico
Un corpo rigido nello spazio ha 6gdl
(gradi di libertà), in quanto ha 3 coordinate che ne individuano l’origine del
proprio sistema di riferimento e altre 3
coordinate occorrono per individuarlo
come orientamento rispetto al proprio
ELETTRONICA OGGI 370 - SETTEMBRE 2007
A
pplicazioni
MEMS
sistema di riferimento. Un punto nello spazio ha 3gdl.
Un corpo rigido nel piano ha 3gdl (coordinata X, Y, e
angolo di rotazione di se stesso rispetto al sistema di
riferimento fisso). Un punto nel piano ha 2 gdl.
Un trasduttore di accelerazione 3D fornisce potenzialmente le informazioni per poter risalire al moto nel
caso di un punto (sia sul piano che nello spazio) che
non subisca rotazioni, che tanto non sarebbero rilevabili e anzi, renderebbero i dati acquisiti non adatti alla
ricostruzione del moto.
Si supponga che il trasduttore sia reso wireless, solidale all’oggetto di cui si vuole risalire al moto di tipo traslazionale (senza rotazioni): se fosse nota costantemente l’inclinazione del sistema, rispetto al piano orizzontale, saremmo in grado di sottrarre la componente
gravitazionale da ogni asse ed ottenere l’accelerazione
ax-ay-az del punto “baricentrico” unicamente dovute al
moto e integrando risalire alla velocità e posizione (a
meno degli errori).
Se si avesse un altro trasduttore che segnalasse costantemente l’inclinazione del sistema, il tutto funzionerebbe automaticamente e non ci sarebbe il vincolo di avere
una inclinazione costante (rimarrebbe quello della non
rotazione): purtroppo un altro trasduttore di accelerazione delegato a questo compito fallirebbe, visto che
risponderebbe con dei segnali funzioni vettoriali sia del
moto che dell’inclinazione.
Di seguito si analizza il risultato ottenuto con due e tre
sensori di accelerazione.
Nel primo caso essi forniscono 6 informazioni, che
scendono a 5 visto il vincolo che li lega; si perdono
quindi altre 2 informazioni per gli assi ortogonali al
moto (si pensi al moto sul piano X-Y: l’informazione
lungo l’asse Z=z non è significativa). Rimangono 3
informazioni indipendenti necessarie e sufficienti a
risolvere i 3 gdl del moto di un corpo rigido sul piano,
che può traslare e ruotare.
Unico vincolo: il corpo rigido non deve affrontare salite o discese: i 2 sensori non sarebbero in grado di
capirlo e si otterrebbero risultati errati.
Con tre sensori di accelerazione si riesce a fare praticamente tutto, anche se è sicuramente complicato.
Infatti da tre trasduttori si ottengono 9 informazioni,
non indipendenti, che scendono a 6 togliendo i 3 vincoli di distanza reciproca: tante quanti i 6gdl del corpo
rigido nello spazio.
✍
ELETTRONICA OGGI 370 - SETTEMBRE 2007
87