INGEGNERIA E TECNOLOGIE DEI SISTEMI
DI CONTROLLO
Modellazione su base fisica
Prof. Carlo Rossi
DEIS - Università di Bologna
Tel: 051 2093020
email: [email protected]
Modellazione fisica
Modelli e modellistica
• Motivazioni per utilizzo di modelli
–
–
–
–
–
–
rappresentazione compatta della conoscenza
istruzione
più facile e meno costoso che lavorare sul sistema reale
a volte il sistema non esiste ancora
modellazione per il progetto
modellazione per il controllo
• Avvertenze
– il modello descrive solamente alcuni aspetti del sistema
– il modello diviene sempre più complesso e pesante aumentando il
livello di dettaglio: modellare solo il necessario
– esiste sempre un range di validità del modello: attenzione al suo
utilizzo al di fuori di tale range
Modellazione fisica
Modelli e modellistica
• Nella costruzione di un modello sono sempre presenti
approssimazioni
–
–
–
–
–
semplificazioni fisiche
approssimazioni sulla struttura di modello
approssimazioni nella identificazione del modello
corrispondenza con i parametri fisici
normalmente si utilizza una famiglia di modelli con diversi gradi di
approssimazione
• La modellazione per definizione è un’attività multidisciplinare
che copre una grande varietà di aspetti
1
Modellazione fisica
Modelli e modellistica
•
•
•
Sistemi meccanici
Sistemi elettrici
Fluidi ed idraulica
•
Sistemi termici
•
–
–
–
–
– fluidi comprimibili e non
– conduzione di calore
– scambiatori di calore
– boiler
•
•
•
Motori
Pompe
Sistemi di potenza
Veicoli
biciclette
autovettore
navi
aeroplani
•
Processi chimici
•
•
Sistemi economici
Ecosistemi
– reattori
– colonne di distillazione
Modellazione fisica
Gestione della complessità
• Da cosa deriva la complessità
• Fattori dipendenti dal sistema
–
–
–
–
–
domini fisici differenti - diversità
comportamenti complessi
dimensioni fisiche
numero di componenti
interazione stretta tra sistemi
• Fattori dipendenti dallo sviluppo del progetto
– progetto parallelo dei vari componenti/sottosistemi
– sottosistemi eterogenei tra di loro
– presenza di componenti tempo continue, tempo discrete e ad
eventi
• La modellazione è essenziale
Modellazione fisica
Gestione della diversità
•
•
•
•
•
•
Astrazione
Forme standard di modello
Parametri adimensionali e variabili normalizzate
Utilizzo di librerie
Utilizzo di tool software
Lavoro in team
2
Modellazione fisica
Modellazione e simulazione
• La modellazione si è sviluppata in parallelo alla simulazione;
questo ha avuto un grande impatto sullo sviluppo dei tool di
modellazione
• Tecniche di simulazione
– analogica: costruzione di sistemi elettrici o meccanici di
simulazione
– digitale: utilizzo di metodi di simulazione approssimati con
soluzione numerica delle equazioni differenziali
• Ambienti di simulazione odierni
–
–
–
–
–
–
simulatori analogici virtuali
facili da utilizzare
granularità e strutturazione
interfaccia grafica e utilizzo di schemi a blocchi
integrazione con ambienti di controllo ed identificazione
esempi: Simulink, VisSim, . . .
Modellazione fisica
Schemi a blocchi
• L’utilizzo di schemi a blocchi rappresenta una forma di
astrazione che è anche un esempio di incapsulamento
dell’informazione
• Rappresenta una maniera elegante per strutturare un sistema
• E’ in relazione diretta con le funzioni di trasferimento
• Presenta comunque delle limitazioni
– molto lavoro di preparazione per passare dal modello fisico allo
schema a blocchi
– modello orientato con ingressi ed uscite
• Esistono altri paradigmi, non ancota sufficientemente maturi
– equazioni algenrico-differenziali
– Modelica
Modellazione fisica
Limitazioni degli schemi a blocchi
• Gli stati possono scomparire
– un condensatore si descrive con una variabile di stato
– due condensatori connessi in parallelo?
– è possibile ottenere il modello del parallelo tramite composizione
dei modelli elementari dei due condensatori?
• Il modello dipende dal contesto
– modellazione di una resistenza: dipende da cosa viene definito
come ingresso
V = RI
–
–
–
–
?
I =V / R
la stessa equazione appare in molte forme
facile commettere errori
difficile da cambiare
difficile costruire delle librerie di componenti
3
Modellazione fisica
Metodologia di modellazione
•
•
•
•
Dividere un sistema in sottosistemi
Equazioni di bilancio di massa, momenti ed energia
Costruire e/o utilizzare librerie di componenti (orientati)
Attività
–
–
–
–
–
–
–
–
capire il plant
rappresentarlo
derivare il modello matematico
analisi delle prorpietà stazionarie
linearizzazione delle dinamiche non lineari
approssimazione e semplificazione
validazione
definire componente di libreria
Modellazione fisica
Attività di modellazione
• Capire il plant
–
–
–
–
meccanismi e funzionamento
ordini di grandezza
standard
limitazioni
• Rappresentare il plant
– schizzi
– schemi a blocchi
– diagrammi di flusso
• Modelli matematici
–
–
–
–
–
scopo
assunzioni e ipotesi
scrittura delle equazioni
normalizzazione delle variabili
range di validità
Modellazione fisica
Attività di modellazione
• Modelli matematici
– definizione di ingressi, stati ed uscite
– parametri e parametri adimensionali
– valori numerici di progetto e/o identificazione parametrica
• Analisi dei modelli
–
–
–
–
proprietà stazionarie
nonlinearità
simulazione
linearizzazione
• Tipi di modello
–
–
–
–
–
relazioni statiche
equazioni differenziali ordinari
equazioni differenziali alle derivate parziali
macchine a stati, reti di Petri, Statecharts e SFC
ibridi
4
Modellazione fisica
Attività di modellazione
• Analisi del modello linearizzato
–
–
–
–
–
–
–
–
equazioni
normalizzaizone e parametri adimensionali
relazione con i parametri fisici
range di validità
funzione di trasferimento
risposta frequenziale
costanti di tempo e guadagni
poli e zeri instabili, ritardi
Modellazione fisica
Modellazione su base fisica
• Uno dei metodi più semplici per ottenere un modello di un
sistema dinamico è ricavare le relazioni che esistono tra ingressi
ed uscite a partire dalle leggi fondamentali della fisica
• Nell’ambito del controllo e della diagnosi si è in genere
interessati a modelli semplici. Utilizzo di modelli a parametri
concentrati
• L’utilizzo delle leggi fondamentali è utile anche quando non si è
in grado di predire il valore numerico dei parametri, per definire
almeno la struttura del modello
• E’ facile ricavare modelli complessi come interconnessione di
modelli elementari
• I vari ambiti applicativi portano a modelli elementari con la
stessa struttura matematica
• Equazioni differenziali del primo o secondo ordine
Modellazione fisica
Modelli di sistemi elementari
• I componenti elementari possono essere classificati in base al
loro comportamento rispetto all’energia
– dissipatori
– accumulatori (di due tipi)
– convertitori
5
Modellazione fisica
Circuiti elettrici
• Legge di Ohm generalizzata: serve per definire i modelli dei
componenti elementari
– resistenze
– capacità
– induttanze
• Leggi di Kirchoff: servono per connettere i sistemi elemetari
– somma di correnti in un nodo
– somma di tensioni su una maglia
• Sistema di riferimento di solito fissato dalla massa comune;
attenzione alla composizione di sistemi con masse separate
Modellazione fisica
Modelli di sistemi elementari
• Sistemi elettrici elementari
–
–
–
–
resistore
induttore
condensatore
trasformatore
• Componenti attivi: inseriscono energia nel sistema
– amplificatore
– transistore
Modellazione fisica
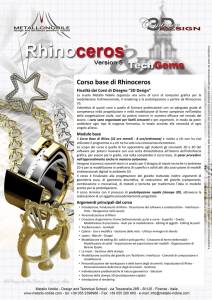
Dissipatori di energia
• Conduttore elettrico
– specifiche:
– modello per:
capacità e induttanza nulle
studiare la relazione tensione/corrente
i
I
v1
un modello matematico
parametro: resistenza
v2
1
i = (v 1 − v 2 )
R
(v1 − v 2 ) = Ri
potenza dissipata
Pd = ∆vi
Pd =
∆v 2
R
Pd = Ri2
6
Modellazione fisica
Accumulatori di energia - 1° tipo
• Condensatore ideale
– specifiche:
– modello per:
non c'è resistenza, non c'è induttanza
studiare la relazione tensione/corrente
i
v1
un modello matematico
energia accumulata
1
E a = C∆ v 2
2
v2
d(v1 − v 2 )
i=C
dt
(v1 − v 2 ) = 1 ∫ idt
C
capacità elettrica
Modellazione fisica
Accumulatori di energia - 2° tipo
• Induttore ideale
– specifiche:
– modello per:
non c'è resistenza, non c'è capacità
studiare la relazione tensione/corrente
i
i
v1
v2
un modello matematico
energia accumulata
(v1 − v 2 ) = L di
i=
1
Ea = Li2
2
dt
1
(
v
−
v
∫ 1 2 )dt
L
induttanza
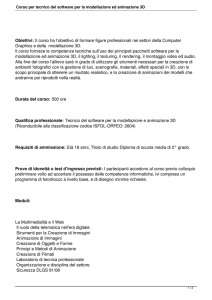
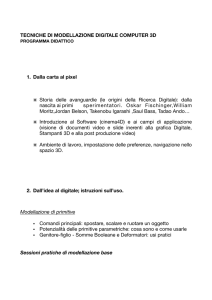
Modellazione fisica
Sistemi complessi - equazione del nodo
• Esempio di circuito elettrico
i(t)
iL
iR
iC
v(t)
i = iL+ iR + iC
equazione
integro-differenziale
equazione differenziale
del 2° ordine
i( t ) =
1
1
dv ( t )
∫ v( t )dt + R v( t ) + C dt
L
di 1
1 dv
d2 v
= v+
+C
dt L
R dt
dt 2
7
Modellazione fisica
Sistemi complessi - equazione della maglia
• Esempio di circuito elettrico
v(t)
i(t)
v = vC + vR + vL
equazione
integro-differenziale
equazione differenziale
del 2° ordine
v=
1
di
∫ idt +RiR + L dt
C
dv 1
di
d2i
= i+R +L
dt C
dt
dt 2
Modellazione fisica
Costruzione di modelli meccanici
• La procedura per la costruzione di modelli meccanici risulta la
seguente
– definizione del sistema di riferimento inerziale
– scomposizione del sistema in componenti (elementi rigidi)
– definizione delle forze/coppie agenti su ciascun elemento, con
esplicitazione delle forze interne secondo il principio di
azione/reazione
– scrittura delle equazioni elementari per ciascun elemento
– eliminazione delle forze interne
• Nel caso di strutture complesse con vincoli, la procedura
precedente può risultare laboriosa; esistono metodi più efficaci
basati su considerazioni energetiche e coordinate generalizzate
Modellazione fisica
Costruzione di modelli meccanici
• I modelli elementari hanno un modello costituito da una
equazione statica o da una equazione differenziale del primo
ordine
• La combinazione di modelli elementari porta in genere ad una
equazione differenziale di ordine più elevato tra ingresso ed
uscita (modello I/O)
• Nello studio del comportamento del sistema, le condizioni iniziali
giocano un ruolo fondamentale
• L’evoluzione del sistema è univocamente determinata una volta
definite la funzione di ingresso e le condizioni iniziali
8
Modellazione fisica
Sistemi meccanici
• Seconda legge di Newton: serve per definire i modelli dei
componenti elementari
– moti traslatori
f = ma
v=
– moti rotativi
1
f
m
x=
1
f
m
1
1
ϑ= T
J
J
• Terza legge di Newton (principio di azione e reazione): serve
per connettere i sistemi elemetari
• Non trascurare la prima legge: serve per scegliere il sistema di
riferimento rispetto al quale le equazioni diventano semplici
T = Jα
ω= T
Modellazione fisica
Moti rotativi e rototraslazioni
• Nei moti rotativi valgono esattamente le stesse considerazioni
dei moti traslazionali, con le sostituzioni
posizione lineare <=> posizione angolare
velocità lineare <=> velocità angolare
accellerazione lineare <=> accellerazione angolare
forza <=> coppia
massa <=> momento di inerzia
Jϑ = Jω = Jα =C
• Nelle rototraslazioni, nella composizione dei moti dei vari
componenti si usa la relazione tra forza e coppia e tra variabili
angolari e variabili lineari
v = rω
C=r f
Modellazione fisica
Dissipatori di energia
• Ammortizzatore
– specifiche:
– modello per:
massa nulla, corpi rigidi
studiare la relazione velocità/forza
f
v
y
un modello matematico
parametro: attrito viscoso
f = βv
1
v= f
β
potenza
dissipata
Pd = fv
Pd = βv 2
Pd =
1
β
f2
9
Modellazione fisica
Accumulatori di energia - 1° tipo
• Massa ideale
– specifiche: non c'è attrito, non c'è elasticità
– modello per: studiare il moto
f
m
y
v
un modello matematico
f = ma a =
energia accumulata
f =m
1
Ea = mv 2
2
dv
dt
dv
dt
v=
dy
dt
v=
1
∫ fdt
m
massa concentrata
Modellazione fisica
Accumulatori di energia - 1° tipo
• Inerzia ideale
– specifiche: non c'è attrito, non c'è elasticità
– modello per: studiare il moto
ϑ
c
J
un modello matematico
energia accumulata
Ea =
1
Jω 2
2
c = Jα
c=J
dω
dt
dω
dϑ
ω=
dt
dt
1
ω = ∫ cdt
J
α=
momento di inerzia
Modellazione fisica
Accumulatori di energia - 2° tipo
• Molla ideale
– specifiche: non c'è massa, non c'è attrito
– modello per: studiare la relazione velocità/forza
f
f
v1
v2
y1
un modello matematico
energia accumulata
Ea =
1 2
f
2k
rigidità
y2
f = k ( y1 − y2 )
f = k ∫ (v1 − v2 )dt
(v1 − v2 ) = 1 df
k dt
10
Modellazione fisica
Espressione della forza
• Forza elastica
– molle lineari f e = k x
– molle non lineari f e = k x + k nl x 3
k nl ≠ 0
• Forza di attrito
– statico e dinamico f as = cas Fn
– viscoso lineare f v = b x
f ad = cad Fn
(
cad < cas
)
– viscoso non lineare f v = f v x, x 2 , x 3 , …
kx
f
bv
M x = f −k x−bx
M
cs M g
Mg
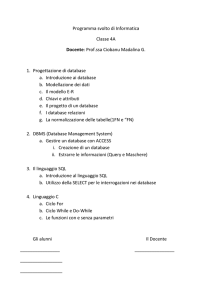
Modellazione fisica
Componenti cinematici
• Riduttore meccanico
– specifiche: non c'è attrito,
– modello per: studiare la relazione rotazione1/rotazione2
ω1
ω2
c1
c2
un modello matematico
bilancio di potenze
rapporto di
riduzione
ω
kr = 1
ω
c
c1 = 2 c2 = 2
ω1
kr
c1ω1 = c2ω 2
ω2
Modellazione fisica
Componenti cinematici
• Riduttore meccanico
– specifiche: non c'è attrito,
– modello per: studiare la relazione rotazione1/rotazione2
c1
ω1
c1
ω1
ω2
1
1
J 2eqω12 = J 2ω 22
2
2
2
ω
J
J 2eq = 2 J 2 = 22
2
k
ω1
r
J1
J1
J2
J2eq
un modello matematico
c1 = J1
dω1
dω
dω1
+ J 2eq 1 = J1 + J 2eq
dt
dt
dt
(
)
11
Modellazione fisica
La lagrangiana
• Si introducono
– le coordinate generalizzate q
– i momenti generalizzati p
• Si calcolano
– l’enervia potenziale V(q)
– l’energia cinetica T(p,q)
• Si definisce la lagrangiana
d ∂L ∂L
−
=F
dt ∂q ∂q
• Le equazioni del moto sono date da
L ( p , q ) = T ( p , q ) − V (q )
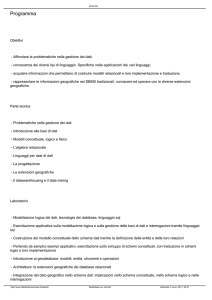
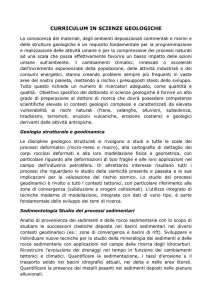
Modellazione fisica
Pendolo su carrello
x p = x + l sen (θ )
mp
x
y p = l cos(θ )
θ
x p = x + l θ cos(θ )
l
y p = −lθ sen (θ )
F
mcar
V = m p g l cos(θ )
• Energia potenziale
• Energia cinetica
(
)
1
1
T = mcar x 2 + m p x 2p + y 2p
2
2
1
1
= m p l 2 θ 2 + m p + mcar x 2 + m p l x θ cos(θ )
2
2
1
1
= J p θ 2 + M x 2 + m p l x θ cos(θ )
2
2
(
)
Modellazione fisica
Equazioni del moto
∂L
= J p θ + m p l x cos(θ )
∂θ
∂L
= M x + m p l θ cos(θ )
∂x
∂L
= m p g l sen (θ ) − m p l x θ sen (θ )
∂θ
∂L
=0
∂x
• Equazioni di Lagrange
d ∂L ∂L
−
=F
dt ∂q ∂q
danno
J p θ + m p l x cos(θ ) − m p g l sen (θ ) = 0
m p l θ cos(θ ) − m p l θ 2 sen (θ ) + M x = F
12
Modellazione fisica
Esempio - Capire il plant
•
•
•
•
•
•
Le equazioni hanno senso?
Qual’è l’interpretazione dei singoli termini?
Cosa capita se il carrello è molto pesante?
Qunado si può trascurare l’interazione tra pendolo e carrello?
Qual’è una normalizzazione adeguata?
Quanti parametri indipendenti sono presenti?
Modellazione fisica
Esempio - normalizzazione
• Le equazioni del moto si possono scrivere come
θ+
x+
mp l
Jp
mp l
M
x cos(θ ) −
mp g l
θ cos(θ ) −
mp l 2
F
θ sen (θ ) =
M
M
Jp
sen (θ ) = 0
• Si ottengono quattro parametri ancora non adimensionali
• Normalizzazione della dimensione lineare
xn = x / l
xn = x / l
• Normalizzazione della scala temporale
τ = ωo t = m p g l J p t
Modellazione fisica
Esempio - normalizzazione
• Le equazioni normalizzate divengono
θ + xn cos(θ ) − sen (θ ) = 0
xn +
mp
M
θ cos(θ ) −
mp 2
F
θ sen (θ ) =
=u
M
M ω o2
dove u è l’accellerazione normalizzata
• Il sistema normalizzato presenta un unico parametro
adimensionale
β = mp M
θ + xn cos(θ ) − sen(θ ) = 0
xn + β θ cos(θ ) − β θ 2 sen (θ ) = u
13
Modellazione fisica
Esempio - linearizzazione
• Linearizzazione intorno ai punti di equilibrio
• Determinazione dei punti di equilibrio
•
θ = θ = 0
x = x = 0
Equazioni linearizzate
θe = 0 ,π
⇒
θ + xn cos(θ e ) − θ cos(θ e ) = 0
xn + β θ cos(θ e ) = u
• Si noti il cambiamento di segno a seconda dell’equilibrio
considerato
INGEGNERIA E TECNOLOGIE DEI SISTEMI
DI CONTROLLO
Modellazione su base fisica - fine
Prof. Carlo Rossi
DEIS - Università di Bologna
Tel: 051 2093020
email: [email protected]
14