Politecnico di Milano
Facoltà di Ingegneria
Corso di Laurea in Ingegneria Elettrica (vo)
rte
Un metodo per
l’identificazione di modelli
termici ridotti di
convertitori statici
Tesi di Laurea di:
Pa
Matteo Gattanini
Relatori:
prof. Francesco Castelli Dezza
ing. Alberto Riboni
Anno Accademico 2004/05
rte
Riassunto
Pa
In questo lavoro si individua un metodo adatto ad
applicazioni system level che consenta di stimare la
temperatura di giunzione dei dispositivi integrati nei
moduli plastici usati nei convertitori statici di media
potenza.
Il modello è basato sulla rappresentazione mediante
reti resistivo-capacitive; questo genere di modelli sono
stati ampiamente adottati e validati in letteratura, e
rappresentano la scelta più conveniente in questi livelli
applicativi.
Nel lavoro viene predisposta una procedura per l’identificazione, ottenuta componendo misure esterne di
temperatura con la caratterizzazione del modulo fornita dal produttore, realizzando gli strumenti software
necessari per la misura e l’elaborazione dei dati.
Il sistema preso in considerazione per l’attuazione della procedura e la verifica dei risultati è molto semplice e consiste in una unità di frenatura che utilizza un
modulo igbt.
La meta-validazione effettuata confrontando per vari regimi di funzionamento le misure di temperatura dell’involucro con i valori simulati indica
uno scostamento entro il grado di approssimazione
previsto.
- documento compilato il 24 luglio 2005, versione 1.03 -
I
Sul documento
R
Questo documento è stato creato in ambiente Windows
; i sorgenti
sono stati editati con WinEdt 5.4 e compilati con MiKTEX 2.4.
Il formato pdf di questo documento è stato ottenuto con ps2pdf, programma fornito con l’interprete PostScript AFPL GhostScript 8.50
(AFPL = Aladdin’s Free Public Licence), il quale ha convertito il
file ps ottenuto processando col driver PostScript dvips (di Tomas
Rokicki) il file dvi (DeVice Independent) prodotto dalla compilazione
dei sorgenti.
Il formato pdf ha diversi pregi; primo fra tutti è la portabilità (non a
caso l’estensione è l’acronimo di Portable Document Format); esistono infatti visualizzatori gratuiti disponibili per la quasi totalità delle
TM
piattaforme (palmari compresi), primo fra tutti Adobe Reader , sviluppato dai creatori del formato stesso.
Il documento incorpora fonti PostScript, quindi scalabili; tuttavia è
consigliabile, per una piacevole lettura a video, attivare nel programma
di visualizzazione la funzione di smoothing dei caratteri.
Una interessante comodità che incoraggia la consultazione a video
è la presenza di link attivi in corrispondenza dei riferimenti interni
(figure, equazioni, indici, . . . ) ed esterni (come gli URL in questa
pagina).
Le figure sono disegnate con il potente pacchetto PStricks
(Timothy Van Zandt), che consente di creare macro PostScript con
semplici comandi; esse sono quindi contenute nel codice sorgente e
vengono disegnate “on the fly” da dvips; questo modo di procedere
consente di avere figure dinamiche, dipendenti da parametri (modificabili facilmente in fase di compilazione) e di non dover allegare alcunché ai file di testo sorgenti; unico svantaggio è non poter compilare direttamente con dvipdfm o pdfTEX (perlomeno non senza qualche
limitazione).
I circuiti elettrici sono stati disegnati grazie al pacchetto pst-circ,
(come si evince dal prefisso si basa su pstricks), di Herbert Voss e
Christophe Jorssen.
Il pacchetto hyperref (Sebastian Rahtz) è servito per creare i link
ipertestuali.
Sugli strumenti
Questo documento è stato un buon esercizio per acquisire familiarità
con LATEX 2ε.
LATEX è il modo più comune di accedere al potente linguaggio
multipiattaforma di formattazione testi TEX, sviluppato a cavallo
degli anni settanta e ottanta dal geniale Dr.Donald E. Knuth, il
quale rese disponibile gratuitamente al resto del mondo il suo lavoro.
LATEX è un insieme di macro TEX scritte da Leslie Lamport, che
consentono di ottenere testi di elevata qualità tipografica occupandosi
solo dei contenuti, ben separati dalla forma con cui essi vengono
organizzati.
Razionalità, qualità, flessibilità, portabilità sono indubbi vantaggi di
questo strumento; il fatto di poter di incorporare i comandi in macro
sempre più complesse ne estende l’uso a qualunque tipo di applicazione, dalla produzione di slides alla scrittura di musica. Centinaia di
pacchetti aggiuntivi sono catalogati e distribuiti da una rete di servers;
alcuni di essi costituiscono un mondo a sé nella vasta e caotica galassia di LATEX, nella quale è facile rimanere confusi o quantomeno
rischiare di fare un cattivo uso delle estensioni, perdendo di vista la
filosofia su cui lo strumento stesso è basato.
Il dilagante analfabetismo informatico rende poco diffuso LATEX
presso l’utenza media, le cui modeste esigenze, spesso ricorsivamente
conseguenti alla mediocre cultura informatica, sono meglio soddisfatte da strumenti più immediati e limitati.
Grazie alla gratuità del TEX esistono motori liberamente distribuibili
R
per tutte le piattaforme, ad esempio MiKTEX per Windows
e teTEX
(di Thomas Esser) per Unix/Linux.
Gli ingressi di questi motori sono dei semplici file di testo; molti
editors ne facilitano la creazione, implementando il riconoscimento
della sintassi e facilitando l’accesso agli eseguibili dei compilatori.
Tra quelli particolarmente specializzati nel supportare la produzione di
documenti con LATEX è doveroso citare WinEdt (shareware), un editor
R
; molto potente è lo storico
molto popolare in ambiente Windows
Emacs di Richard Stallman, nato in ambiente libero e parte integrante
di ogni distribuzione gnu-Linux.
scritto in: LATEX 2ε
compilato con: MiKTEX 2.4
PSTricks
inside
rte
Prefazione
Pa
Un compito essenziale dell’ingegneria è affrontare la
complessità della realtà cercando di descriverla secondo le finalità preposte e in modo compatibile con i costi, i tempi e i mezzi a disposizione. Gran parte di
questo lavoro è quantificare il peso delle approssimazioni possibili al fine di individuare la descrizione più
idonea e, soprattutto, di conoscerne i limiti.
Credo che l’argomento di questo lavoro di laurea
(non certo il modo in cui esso è svolto) sia un caso
esemplare di questa attività.
Avere la descrizione di una porzione di realtà significa
essenzialmente due cose: poterne prevedere il comportamento e poter progettare qualcosa che si comporti
nel modo voluto. Senza di essa non resterebbe altro
che fare come gli antichi: cercare di indovinare il futuro, sovradimensionare, e procedere per tentativi. . .
II
rte
Ringraziamenti
Questo piccolo lavoro è stato sostenuto nell’azienda
Static Control Systems di Verderio inferiore.
Vorrei ringraziare sentitamente:
" Alberto Riboni per tutto il sostegno
K Emanuele Pozzi per la sapiente scelta del
momento delle pause
Pa
H Paolo Mazza per la comprensione e l’appoggio
morale
% Fausto Molinelli per i preziosi interventi e
consigli
z prof. Francesco Castelli Dezza , del dipartimento di elettrotecnica del Politecnico di Milano,
per la libertà accordata
III
Pa
rte
Ai miei genitori
Indice
1
rte
1 Introduzione
1.1 Il contesto . . . . . . . . .
1.1.1
Esigenze progettuali .
1.1.2
Nuove tendenze . . .
1.1.3
L’azienda . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
1
1
3
3
1.2 Lo scopo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2.1
Tema essenziale . . . . . . . . . . . . . . . . . . . . . . .
1.2.2
Le specifiche . . . . . . . . . . . . . . . . . . . . . . . . .
4
4
5
1.3 Il sistema in esame . . . . . . . . . . . . . . . . . . . . . . . .
1.3.1
Prime osservazioni . . . . . . . . . . . . . . . . . . . . . .
1.3.2
Prime considerazioni . . . . . . . . . . . . . . . . . . . . .
6
6
8
1.4 Contenuti del lavoro . . . . . . . . . . . . . . . . . . . . . . . 9
1.4.1
Argomenti . . . . . . . . . . . . . . . . . . . . . . . . . .
9
1.4.2
Struttura . . . . . . . . . . . . . . . . . . . . . . . . . . 10
12
Pa
2 Sul componente di potenza
2.1 Sulle “valvole statiche” . . . . . . . . . . . . . . . . . . . . . . 12
2.2 Sull’IGBT . . . . . . . . . . . . . . .
2.2.1
Struttura e funzionamento . . . .
2.2.2
Commutazione . . . . . . . . . .
2.2.3
Gli effetti della temperatura . . .
2.2.4
Potenza dissipata . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
13
15
20
24
25
2.3 Moduli di potenza . . . . . . . . . . . . . . . . . . . . . . . . . 33
2.3.1
Architettura DCB . . . . . . . . . . . . . . . . . . . . . . 33
2.3.2
Caratterizzazione termica dei moduli . . . . . . . . . . . . . 35
3 Trasmissione del calore
38
3.1 Bilancio termico . . . . . . . . . . . . . . . . . . . . . . . . . . 38
3.2 Conduzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
V
3.2.1
3.2.2
3.2.3
3.2.4
Legge di Fourier . . . . . .
Equazione del calore . . . . .
Sistemi monodimensionali . .
Modelli a parametri concentrati
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
40
41
42
48
3.3 Convezione e irraggiamento . . . . . . . . . . . . . . . . . . . 51
3.3.1
Convezione . . . . . . . . . . . . . . . . . . . . . . . . . 51
3.3.2
Irraggiamento . . . . . . . . . . . . . . . . . . . . . . . . 52
4 Trattazione del tema
54
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
54
54
55
56
4.2 Modelli . . . . . . . . . . . . . . . . . . .
4.2.1
Caratterizzazione classica . . . . . . .
4.2.2
Modelli numerici . . . . . . . . . . .
4.2.3
Soluzioni analitiche approssimate . . .
4.2.4
Reti resistivo-capacitive . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
58
58
59
59
60
4.3 Approccio al problema . . .
4.3.1
Scelta del modello . . .
4.3.2
Ideazione delle misure .
4.3.3
Identificazione . . . . .
4.3.4
Uso del modello . . . .
4.3.5
Verifica del modello . .
rte
4.1 Uno sguardo alla letteratura . . .
4.1.1
Informazioni generiche . . . .
4.1.2
Dentro nei moduli . . . . . .
4.1.3
Tecniche di identificazione . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
67
67
72
77
82
83
4.4 Sui limiti del modello scelto .
4.4.1
La monodimensionalità . .
4.4.2
La discretizzazione . . . .
4.4.3
La linearità . . . . . . .
4.4.4
Mutuo riscaldamento . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
84
84
85
85
87
87
Pa
.
.
.
.
.
.
4.4.5
Calcoli approssimati della dissipazione
5 Implementazione
89
5.1 Software di misura . . . . . . . . . . . . . . . . . . . . . . . . 89
5.2 Ottenimento del modello . . . . . . . . .
5.2.1
Passaggio da rete Foster a Cauer . . .
5.2.2
Determinazione della rete complessiva .
5.2.3
Calcolo della potenza dissipata . . . .
5.2.4
Modello complessivo . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
89
90
92
97
104
5.3 Simulazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
VI
6 Il sistema in esame
109
6.1 Sull’apparecchio considerato . .
6.1.1
Funzionamento . . . . . .
6.1.2
L’unità di frenatura ufs15 .
6.1.3
Struttura . . . . . . . . .
6.1.4
Dissipatore . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
110
110
110
111
112
rte
6.2 Il modulo Eupec bsm75gb120dlc . . . . . . . . . . . . . . . . 113
6.2.1
Caratteristiche termiche . . . . . . . . . . . . . . . . . . . 117
6.2.2
Caratteristiche elettriche . . . . . . . . . . . . . . . . . . . 119
7 Il sistema di misura
121
7.1 Allestimento di misura . . . . . . . . . . . . . . . . . . . . . . 121
7.2 Strumenti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
7.2.1
Misura delle grandezze elettriche . . . . . . . . . . . . . . . 124
7.2.2
Misure di temperatura . . . . . . . . . . . . . . . . . . . . 125
7.3 Sulla non idealità delle condizioni di misura
7.3.1
Linea di alimentazione . . . . . . . . . .
7.3.2
Sonde elettriche . . . . . . . . . . . . .
7.3.3
Sulle misure di temperatura . . . . . . .
7.3.4
Misura della temperatura di interfaccia . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
8 Identificazione e simulazione
130
131
131
131
133
134
8.1 Sulle misure effettuate . . . . . . . . . . . . . . . . . . . . . . 134
.
.
.
.
Pa
8.2 Misure statiche . . . . . . . . . . . . .
8.2.1
Dimensionamento del carico . . . .
8.2.2
Grandezze elettriche . . . . . . . .
8.2.3
Misure statiche di temperatura . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
134
135
135
136
8.3 Identificazione . . . . . . . . . . . . . . . . . . . . . . . . . . . 139
8.3.1
Misura della risposta al gradino . . . . . . . . . . . . . . . . 139
8.3.2
Elaborazioni . . . . . . . . . . . . . . . . . . . . . . . . . 140
8.4 Ingresso intermittente . . . . . . . .
8.4.1
Sulla risposta del sistema . . . .
8.4.2
Confronto delle perdite . . . . .
8.4.3
Confronto della temperatura . .
9 Conclusione
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
146
146
149
151
155
9.1 Sviluppi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 155
9.2 Conclusioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . 156
VII
A Ulteriori informazioni
157
A.1 Sulle simulazioni . . . . . . . . . . . . . . . . . . . . . . . . . 157
R
A.2 Altri scripts MatLab
. . . . . . . . . . . . . . . . . . . . . . . 158
A.2.1 Fitting delle curve . . . . . . . . . . . . . . . . . . . . . . 158
A.2.2 Caratteristiche del dispositivo . . . . . . . . . . . . . . . . . 160
A.3 Altre misure . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161
B Applicazioni sviluppate
163
rte
B.1 Un segnale di comando . . . . . . . . . . . . . . . . . . . . . . 163
B.2 Comunicare con il data logger . . . . . . . . . . . . . . . . . . 166
C Convezione
170
C.1 Le equazioni in gioco . . . . . . . . . . . . . . . . . . . . . . . 170
C.2 Forma adimensionale . . . . . . . . . . . . . . . . . . . . . . . 174
C.3 Convezione naturale . . . . . . . . . . . . . . . . . . . . . . . 177
C.4 Piastra verticale . . . . . . . . . . . . . . . . . . . . . . . . . . 180
C.5 Nota conclusiva . . . . . . . . . . . . . . . . . . . . . . . . . . 184
Bibliografia
188
Pa
Elenco delle figure
1.1
1.2
1.3
1.4
1.5
Cause di guasto dei dispositivi elettronici . . . .
Rappresentazione black-box del modello cercato
Legami tra gli aspetti principali del problema .
Bilancio energetico . . . . . . . . . . . . . . . .
Schema a blocchi del problema . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. 2
. 5
. 6
. 9
. 10
2.1
2.2
2.3
2.4
2.5
2.6
Campo di applicazione dei dispositivi di potenza
Porte elettriche dell’IGBT . . . . . . . . . . . . .
Struttura dell’IGBT verticale . . . . . . . . . . .
Portatori di carica nell’IGBT . . . . . . . . . . .
Caratteristiche esterne dell’IGBT . . . . . . . . .
Un circuito equivalente dell’IGBT . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
VIII
14
15
16
17
18
19
Un altro modello circuitale dell’IGBT . . . . . . . . . .
Un IGBT che comanda un carico induttivo . . . . . . .
Accensione dell’IGBT . . . . . . . . . . . . . . . . . . .
Spegnimento dell’IGBT . . . . . . . . . . . . . . . . . .
Commutazione dell’IGBT vista all’oscilloscopio . . . . .
Classificazione delle perdite nell’IGBT . . . . . . . . . .
Classificazione delle perdite nel diodo di ricircolo . . . .
Dissipazione di energia durante lo switching . . . . . .
Una stima della potenza istantanea dissipata nell’IGBT
Corrente nel diodo allo spegnimento dell’IGBT . . . . .
Perdite nel diodo di ricircolo . . . . . . . . . . . . . . .
Struttura di un modulo DCB . . . . . . . . . . . . . . .
Resistenze termiche in una struttura DCB . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
19
20
21
22
23
26
26
28
29
31
32
34
36
3.1
3.2
3.3
3.4
Temperature statiche delle pareti di un sistema multistrato
Grafico di un integrale dell’equazione del calore . . . . . .
Rete equivalente del modello discretizzato . . . . . . . . .
Identificazione della rete termica per ispezione . . . . . . .
.
.
.
.
.
.
.
.
44
47
49
50
4.1
4.2
4.3
4.4
4.5
4.6
4.7
4.8
4.9
4.10
4.11
4.12
4.13
4.14
4.15
4.16
4.17
4.18
Sovrapposizione degli effetti . . . . . . . . . . . . . . . . . . .
Geometria tipica dei sistemi in studio . . . . . . . . . . . . . .
Rete Cauer . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Ispezione del sistema . . . . . . . . . . . . . . . . . . . . . . .
Rete Foster . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Rete Foster giunzione-case . . . . . . . . . . . . . . . . . . . .
Sistema avente un solo modulo . . . . . . . . . . . . . . . . . .
Esplicitazione di un modello per la parte esterna . . . . . . . .
Schema dei calcoli delle dissipazioni . . . . . . . . . . . . . . .
Unione della caratterizzazione del modulo e del sistema esterno
Esempi di acquisizioni della curva di riscaldamento . . . . . .
Rete Cauer della parte esterna . . . . . . . . . . . . . . . . .
Modello complessivo . . . . . . . . . . . . . . . . . . . . . . .
Rete Foster del modulo . . . . . . . . . . . . . . . . . . . . . .
Rete foster equivalente del sistema di dissipazione . . . . . . .
Fotogramma di una simulazione FEM . . . . . . . . . . . . . .
Interazione tra più sorgenti di calore . . . . . . . . . . . . . .
Conduttività termica del silicio e temperatura . . . . . . . . .
58
61
63
63
64
69
70
70
71
73
75
75
77
78
78
83
84
86
Pa
rte
2.7
2.8
2.9
2.10
2.11
2.12
2.13
2.14
2.15
2.16
2.17
2.18
2.19
5.1 Entrate e delle uscite dello script FosterToCauer.m . . . . . . 90
5.2 Entrate e delle uscite dello script MergeToCauer.m . . . . . . . 92
5.3 Identificazione della rete complessiva . . . . . . . . . . . . . . 97
IX
Schema a blocchi del calcolo delle perdite . . . .
Grafico delle perdite calcolate per segnali lenti .
Particolare delle perdite calcolate . . . . . . . .
Grafico delle perdite calcolate per segnali veloci
Schema a blocchi del modello complessivo . . .
TM
Implementazione della rete termica in pspice
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
97
103
103
104
105
108
6.1
6.2
6.3
6.4
6.5
6.6
6.7
6.8
6.9
6.10
Il circuito di potenza . . . . . . . . . . . . .
Interno dell’unità di frenatura . . . . . . . .
Dati del dissipatore L8044 . . . . . . . . . .
Il modulo Eupec bsm75gb120dlc low-loss .
L’interno del bsm75gb120dlc . . . . . . . .
Particolare del chip nel bsm75gb120dlc . .
Posizione delle sorgenti del calore . . . . . .
Struttura del modulo in esame . . . . . . . .
Impedenze termiche del bsm75gb120dlc .
Caratteristiche del modulo bsm75gb120dlc
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
109
111
113
113
114
115
115
116
117
120
7.1
7.2
7.3
7.4
7.5
7.6
7.7
7.8
7.9
7.10
7.11
Il sistema di misura . . . . . . . . . . . . .
Pilotaggio esterno dell’unità di frenatura .
Connessioni al modulo di potenza . . . . .
Posizionamento della termocoppia sul case
Posizione delle termocoppie . . . . . . . .
Coefficienti di Seebeck . . . . . . . . . . .
Giunzioni nelle termocoppie . . . . . . . .
Giunzioni nelle termocoppie . . . . . . . .
Schema interno del nudam 6018 . . . . . .
Il moduli nudam . . . . . . . . . . . . . .
Rumore sulle termocoppie . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
122
123
124
125
126
127
128
128
130
130
132
8.1
8.2
8.3
8.4
8.5
8.6
8.7
8.8
8.9
8.10
8.11
Circuito di potenza durante la conduzione . .
Ripple della potenza persa in conduzione . . .
Misure statiche di temperatura . . . . . . . .
Percorso case-ambiente . . . . . . . . . . . . .
Tratto case-dissipatore . . . . . . . . . . . . .
Misure sul dissipatore . . . . . . . . . . . . . .
Insieme delle risposte al gradino misurate . . .
Errore asintotico nel raffreddamento . . . . . .
Riscaldamento del case per un gradino di 48 W
Particolare delle elaborazioni . . . . . . . . . .
Raffreddamento del case . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. .
. .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
135
136
137
137
138
139
141
142
144
144
145
Pa
rte
5.4
5.5
5.6
5.7
5.8
5.9
X
.
.
.
.
.
.
.
.
.
.
.
Risposta a potenza intermittente . . . . . . . . .
Diagramma di Bode della rete . . . . . . . . . . .
Temperature misurate con ingresso intermittente .
Sovrapposizione delle dinamiche . . . . . . . . . .
Grandezze elettriche nel circuito di potenza . . . .
Grandezze elettriche in accensione . . . . . . . . .
Grandezze elettriche in spegnimento . . . . . . . .
Validazione per un riscaldamento pulsante . . . .
Particolare del riscaldamento pulsante . . . . . .
Validazione per un raffreddamento pulsante . . .
Particolare del raffreddamento pulsante . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
147
147
148
148
149
150
151
152
153
154
154
rte
8.12
8.13
8.14
8.15
8.16
8.17
8.18
8.19
8.20
8.21
8.22
A.1 Misure ad ingresso pulsante . . . . . . . . . . . . . . . . . . . 161
A.2 Grandezze elettriche con carico induttivo . . . . . . . . . . . . 162
A.3 Misure di temperatura in alta tensione . . . . . . . . . . . . . 162
B.1 xCtrlSet - selezione delle caratteristiche del segnale . . . . . . 165
B.2 xCtrlSet - selezione del pin della porta . . . . . . . . . . . . . 166
B.3 Uno screenshot del “nudam manager” . . . . . . . . . . . . . . 167
Pa
C.1 Piastra verticale: profili di velocità e temperatura . . . . . . . 181
C.2 Piastra verticale: velocità e temperature al variare di P r . . . 182
C.3 Numero di Nüsselt al variare del tipo di moto . . . . . . . . . 183
XI
Elenco degli acronimi
American Standard Code for Information Interchange
AN
Application Note
API
Application Programming Interface
BJT
Bipolar Junction Transistor
CFD
Computational Fluid Dynamics
CJC
Cold Junction Correction
DCB
Direct Copper Bonding
EIA
Electronic Industries Alliance
FEM
Finite Element Method
IEEE
Institute of Electrical and Electronics Engineers
Pa
rte
ASCII
IGBT
Insulated Gate Bipolar Transistor
IPEM
Integrated Power Electronics Module
JEDEC
Joint Electron Device Engineering Council
LTI
Linear Time Invariant
MCM
Multi Chip Module
MOS
Metal Oxide Silicon
MOSFET
Metal Oxide Silicon Field Effect Transistor
NPT
Non Punch Through
ODE
Ordinary Differential Equation
XII
Partial Differential Equation
PT
Punch Through
PWM
Pulse Width Modulation
RCCM
Resistors Capacitors Component Model
RTS
Request To Send
TRAIT
Thermal Resistance Analysis by Induced Transient
rte
PDE
Temperature Sensitive Parameter
TTIC
Transient Thermal Impedance Curve
Pa
TSP
XIII
Capitolo 1
rte
Introduzione
In questo capitolo viene introdotto il lavoro di laurea presentando il
contesto in cui è inserito, il traguardo che si propone e le parti principali che lo compongono, dopo aver descritto sommariamente il sistema in esame e i fenomeni che prendono parte nel problema in
questione.
1.1
1.1.1
Il contesto
Esigenze progettuali
Pa
Negli ultimi decenni i dispositivi a semiconduttore hanno rivoluzionato
le aree degli azionamenti elettrici e della conversione dell’energia; il rapido sviluppo tecnologico ha progressivamente realizzato prodotti in grado di
soddisfare le crescenti esigenze applicative.
Se da un lato questi dispositivi hanno permesso di raggiungere traguardi
tecnologici notevoli, dall’altro hanno complicato non poco i sistemi da studiare: una loro pesante non linearità deriva dal fastidioso legame del loro
comportamento elettrico con la temperatura, circostanza che ha accentuato il bisogno di descrivere il comportamento termico del sistema per poter
prevedere in modo accurato quello elettrico. Per poter tenere in conto degli
effetti dell’autoriscaldamento nella simulazione elettrica è necessario basarsi
su strumenti di simulazione termica in grado di interfacciarsi in modo veloce
ai simulatori circuitali, oppure addirittura mettere in condizioni questi ultimi
di gestire autonomamente il modello termico del sistema.
Esiste anche un’esigenza meno accademica che motiva questo tipo di studi
1
Introduzione - 1.1. Il contesto
2
(e questo lavoro): la temperatura del dispositivo non ha solo il potere di
alterarne il comportamento, ma anche quello di distruggerlo.
La massima potenza trasferibile dai convertitori elettronici è limitata da
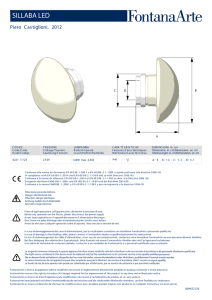
quanto calore è possibile dissipare mantenendo la temperatura di funzionamento entro valori accettabili: gli effetti nefasti della temperatura sul tempo di vita dei dispositivi sono ampiamente provati e documentati in diversi
studi1 , come quelli illustrati in figura 1.1.
rte
Temperatura
55%
Umidità
19%
Sporcizia
6%
Vibrazioni
20%
Figura 1.1: Principali cause di guasto dei dispositivi elettronici di potenza
Pa
(fonte: USA Air Force Avionics Integrity Program)
In proposito ai guasti dovuti alla temperatura non bisogna pensare solo
al cambiamento radicale della chimica dei materiali ed alla conseguente alterazione irreversibile delle caratteristiche fisiche e meccaniche (bruciatura,
fusione), ma anche semplicemente alla modificazione reversibile del comportamento elettrico che porta ad un funzionamento al di fuori dalle specifiche
di progetto; dannose sono inoltre le variazioni di temperatura, indipendentemente dal valore assoluto: i cicli di riscaldamento-raffreddamento causano
stress meccanici dovuti ai differenti coefficienti di espansione termica dei materiali costituenti il componente; queste sollecitazioni possono dare luogo a
rotture in seguito alla diffusione e raggruppamento dei difetti, danneggiando
le connessioni elettriche o termiche.
Ben nota è la legge empirica che lega la vita del dispositivo alla temperatura di
funzionamento: un esponenziale decrescente.
1
Introduzione - 1.1. Il contesto
3
Per l’utilizzatore di questi dispositivi diventa quindi fondamentale capire
quando essi corrono seri rischi di guasto a causa del riscaldamento eccessivo;
formulando il concetto con termini più appropriati questo si traduce nella
capacità di tracciare le zone di funzionamento dove il dispositivo è in grado di funzionare in modo continuativo senza guastarsi, e nel quantificare la
robustezza e l’affidabilità nelle condizioni di esercizio più gravose.
1.1.2
Nuove tendenze
Pa
rte
La temperatura è quindi la grandezza principale che limita la modalità
di impiego dei dispositivi elettronici e che influisce sulla robustezza a lungo
termine; questo comporta che nella realizzazione dei componenti elettronici
di potenza, ma anche nella progettazione degli apparecchi che ne fanno uso, è
fondamentale fornire un adeguato canale di dissipazione termica in modo da
limitare il riscaldamento dovuto alla potenza dispersa internamente; questa
necessità progettuale aggiunge ulteriormente importanza lo studio termico
del sistema.
L’attuale tendenza nell’elettronica di potenza è avere grandi capacità
di conversione in dimensioni sempre più piccole e componenti sempre più
complessi, composti da più dispositivi integrati nello stesso modulo.
Questo aumento della densità di potenza ha accresciuto la temperatura di esercizio influenzando negativamente la probabilità di guasti: per non
compromettere l’affidabilità dei prodotti i margini di progettazione termica
devono assottigliarsi, rendendo necessario l’uso di modelli più accurati che
nel passato.
Questa necessità si trasferisce dai produttori dei componenti a chi li utilizza nei propri apparecchi; ciò motiva il fiorire di studi, trattazioni e prodotti hardware e software riguardanti la caratterizzazione termica dei sistemi
elettronici di potenza.
1.1.3
L’azienda
Questo lavoro è stato svolto all’interno dell’azienda Static Control Systems
di Verderio inferiore. scs opera nel settore degli azionamenti elettronici dal
1977, inizialmente nella progettazione e realizzazione di quadri elettrici per
l’automazione di macchine ed impianti, poi nella produzione di convertitori
in corrente continua e nella distribuzione e assistenza tecnica dei convertitori
di frequenza ed AC servo Mitsubishi Electric.
La produzione comprende azionamenti per motori sincroni a magneti permanenti e unità di frenatura. Il cuore di questi prodotti è costituito dai moduli
che contengono i dispositivi a semiconduttore realizzati dalle grandi aziende
Introduzione - 1.2. Lo scopo
rte
mondiali del silicio; in particolare per queste applicazioni di media potenza
( 10 ÷ 100Kw ) sono utilizzati gli Insulated Gate Bipolar Transistors (IGBTs).
scs, in quanto utilizzatore di questi componenti, ha l’esigenza di studiare
il comportamento termico dei suoi apparecchi e di migliorare l’accuratezza
del modello precedentemente adottato.
Una stima della temperatura nei moduli è importante non solo in fase
progettuale, nella scelta dei componenti e del sistema di dissipazione, ma
anche per caratterizzare il prodotto finito valutandone il livello di affidabilità e definendo i regimi e le condizioni di funzionamento ottimali; questa
caratterizzazione è inoltre utile per quanto riguarda il supporto agli utenti
del prodotto, i quali spesso domandano di stimare le condizioni di pericolo
relative ad eventuali manovre anomale, il che presuppone una descrizione
precisa dei fenomeni in gioco.
Oltre a questo non è da sottovalutare la possibilità di un impiego on-line
del modello: se esso fosse riducibile ad un’equazione alle differenze ed elaborabile in tempi opportuni da un microprocessore, sarebbe possibile implementare una protezione software direttamente a livello della logica di comando
dei dispositivi, aumentando la robustezza del prodotto.
4
1.2
1.2.1
Lo scopo
Tema essenziale
Pa
Il tema essenziale di questo lavoro è l’indagine del legame tra la modalità di funzionamento di un convertitore switching e la sua temperatura
operativa; in particolare verranno considerati apparecchi basati su moduli di
potenza contenenti dispositivi IGBT, che coprono ormai la quasi totalità delle
applicazioni di media potenza.
Con la consapevolezza di essere ben lungi dal trattare in modo esauriente
questo vasto argomento, in questo lavoro si cerca di individuare la metodologia più opportuna per caratterizzare dal punto di vista termico, a livello di
utilizzatore, un sistema di conversione statica che fa uso di moduli di potenza.
In altre parole, ciò che motiva questo lavoro è la definizione di un percorso
adeguato al contesto di applicazione appena descritto che consenta di individuare una descrizione degli apparecchi in produzione che incorporano moduli
elettronici di potenza, al fine di stimare con una ragionevole accuratezza la
temperatura del dispositivo note le grandezze elettriche di funzionamento.
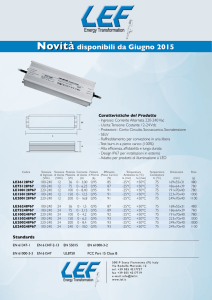
Volendo rappresentare il problema con gli schemi a blocchi dei sistemisti,
si tratta di individuare il contenuto della scatola nera in figura 1.2.
Introduzione - 1.2. Lo scopo
Tji
rte
Sistema elettrico esterno
Pilotaggio
5
Figura 1.2: Rappresentazione black-box del modello cercato
1.2.2
Le specifiche
Il modello cercato, perché possa dirsi appropriato nel contesto di utilizzo descritto, e quindi essere realmente utile a qualcuno, deve possedere dei
requisiti ben precisi:
• In primo luogo, considerazione che appare banale, il modello deve essere identificabile con gli strumenti a disposizione, che in sostanza sono un normale
oscilloscopio e delle termocoppie.
Pa
• Il modello non deve essere identificato per ogni singolo apparecchio ma deve
essere rappresentativo dell’insieme di apparecchi dello stesso tipo.
• Il modello non deve richiedere ulteriori misure al variare della marca o della serie
del modulo di potenza usato.
• Il modello deve essere identificabile attraverso un processo ben definito e il più
possibile automatizzato.
• Il modello deve essere correlato in modo noto alla topologia del sistema in modo
da facilitare la fase progettuale e l’ottimizzazione del dissipatore.
• Il modello deve essere possibilmente scalabile, ovvero poter essere facilmente
ridotto in forme semplificate e implementabili per elaborazioni in tempo reale.
Una considerazione su queste specifiche: rappresentare il comportamento di un insieme di oggetti significa prevedere un margine di pessimismo
che comprenda fattori aleatori che influenzano le uscite del sistema, come
Introduzione - 1.3. Il sistema in esame
rte
ad esempio il differente tipo di pasta termica usata in diversi lotti di produzione, le tolleranze sulla pressione di fissaggio del modulo al dissipatore,
oppure semplicemente le differenti condizioni ambientali di funzionamento;
questo comporta una necessità meno stringente sull’accuratezza del modello
da adottare, a sua volta in qualche modo legata alla tipologia di strumenti
di misura a disposizione per l’identificazione.
Specifiche del modello, strumenti a disposizione e accuratezza del modello
sono tre aspetti che devono essere perfettamente bilanciati affinché non si
abbia spreco di risorse o risultati senza alcun valore: la figura 1.3 vorrebbe
rappresentare i legami tra questi aspetti; in un mondo ideale gli strumenti
e il tempo a disposizione non sarebbero imposti ma dipenderebbero solo dal
modello da identificare scelto in base alle specifiche.
6
Strumenti,
tempo
Specifiche
Modello
Figura 1.3: Legami tra gli aspetti principali del problema
Il sistema in esame
Pa
1.3
Descriviamo in modo discorsivo i fenomeni in gioco, con il duplice intendimento di tratteggiare una prima descrizione del problema e sviscerare i
punti principali dello studio, compresi i possibili punti critici.
1.3.1
Prime osservazioni
Consideriamo un generico convertitore switching: esso è costituito da una
certa configurazione di interruttori controllati, tipicamente transistori di potenza integrati in uno o più moduli, comandati secondo un opportuno criterio di funzionamento da una logica di controllo e un circuito di comando
(driving).
Introduzione - 1.3. Il sistema in esame
7
rte
Una parte del substrato di silicio che realizza i transistori sarà sede di una
densità di corrente che per gli effetti resistivi provocherà un riscaldamento,
perturbando il campo di temperatura1 altrimenti uniforme.
Per ogni componente ciò che interessa è il campo di temperatura all’interno del silicio, ed in particolare un suo valore rappresentativo2 , che chiameremo Tj , temperatura di giunzione; è a questo valore che in genera fanno
riferimento i modelli elettrici che tengono conto della temperatura, ma l’aspetto più importante in questo ambito è il fatto che il buon funzionamento
del dispositivo è garantito per Tj al di sotto di una soglia critica.
Pa
Il campo di temperatura nel silicio dipenderà da quanto calore viene generato e da come esso si trasferisce al resto del sistema. Il calore generato
dipenderà dalle condizioni di utilizzo del dispositivo, che comprendono il sistema elettrico esterno al quale è collegato, la logica di pilotaggio, il segnale
di comando; esso sarà anche strettamente legato ai meccanismi di conduzione
elettrica nel semiconduttore, e poiché questi sono fortemente influenzati dalla
temperatura, ecco una fastidiosa non linearità3 , che potrà essere ignorata per
badare all’essenziale, ma che non dovrà essere dimenticata.
Il calore generato provocherà un riscaldamento del silicio e fluirà attraverso fenomeni di conduzione verso le zone adiacenti, seguendo prevalentemente il percorso termicamente più favorevole, espandendo il fronte della
perturbazione di temperatura verso le zone più lontane del sistema.
Le regioni attive del chip, dove viene prodotto il calore, saranno caratterizzate dalle dinamiche più veloci della temperatura, anche per la piccola
energia termica che sono in grado di assorbire, con costanti di tempo al di
sotto del millisecondo; via via allontanandosi il tempo di variazione si dilata,
arrivando a costanti di tempo di decine di minuti del dissipatore.
È da osservare che le caratteristiche termiche del silicio, da buon semiconduttore, sono fortemente dipendenti dalla temperatura; sarà quindi
opportuno perlomeno non dimenticarsi di questa non linearità.
Il calore quindi diffonde per conduzione alle regioni adiacenti il silicio
addensandosi per la via più conduttiva, costituita dagli strati di rame e dal
substrato ceramico, attraverso le resine epossidiche collanti fino alla base
metallica (baseplate) dell’involucro (case), e poi tramite la pasta termica di
interfaccia al dissipatore (heatsink).
Naturalmente si sta considerando il volume occupato dal sistema.
Ad esempio il valore massimo.
3
Questa dipendenza motiva i diversi modelli elettrotermici proposti in letteratura per
i vari dispositivi a semiconduttore, rafforzando la necessità di uno studio termico per
caratterizzare in modo accurato il comportamento elettrico di questi dispositivi.
1
2
Introduzione - 1.3. Il sistema in esame
rte
Una piccola parte del calore riscalderà le connessioni elettriche esterne, il
gel siliconico di riempimento e l’involucro plastico del modulo.
Sulla superficie che delimita il volume occupato dal sistema, principalmente la superfice del dissipatore, il calore è trasmesso all’ambiente circostante
attraverso fenomeni piuttosto complessi e fortemente non lineari. L’aria a
contatto con la superficie si riscalderà per conduzione; alla locale diminuzione di densità corrisponderà, a causa del campo gravitazionale, una forza
di galleggiamento (buoyancy) che darà luogo ad un moto convettivo tanto
più vigoroso quanto è maggiore il salto di temperatura; grazie a questo moto
il calore scambiato è ordini di grandezza maggiore di quello che si avrebbe
unicamente per conduzione.
Oltre al fenomeno convettivo parte dell’energia sarà ceduta all’ambiente
per irraggiamento: la superficie calda emetterà onde elettromagnetiche aventi
energia maggiore rispetto quelle ricevute dall’ambiente.
8
1.3.2
Prime considerazioni
Il sistema scambia energia col mondo esterno non solo attraverso le sue
porte elettriche, ma anche attraverso gli scambi termici al suo contorno;
in ogni istante deve valere l’equazione di bilancio energetico, che con la
convenzione degli utilizzatori si scrive:
energia incremento calore
elettrica =
energia
+
(1.1)
uscente
entrante
interna
Pa
Il bilancio espresso nell’equazione (1.1) è rappresentato, in termini di potenza, dalla figura 1.4, nella quale sono ben visibili i tre aspetti da sviluppare
per affrontare il problema: quantificare la potenza elettrica scambiata con
l’esterno, quantificare quanta energia viene accumulata dal sistema e in che
modo essa fluisce all’esterno.
Con un po’ di fantasia si possono immaginare le principali forme di accumulo di energia nel dispositivo: una elettrostatica, legata alle capacità interne, una magnetica dovuta alle induttanze parassite e una termica legata alla
capacità termica dell’oggetto. Quest’ultima è esprimibile nel seguente modo,
una volta definito il contorno del sistema:
energia Z
termica
=
ρcT dV
(1.2)
V
immagazzinata
Dove V è il volume interessato e ρ , c , T rispettivamente i campi di
densità, calore specifico e temperatura definiti in esso.
Introduzione - 1.4. Contenuti del lavoro
9
Qu
Pe
dW
dt
rte
Figura 1.4: Bilancio energetico
Può essere sensato ritenere che la parte preponderante dell’energia accumulata sia termica; in tal caso il bilancio energetico del nostro sistema, in
termini di potenze, si scrive così:
Z
d
dQu
ρ c T dV +
(1.3)
Pe =
dt V
dt
È proprio grazie al fenomeno conservativo espresso dalla (1.3) che il sistema può assorbire picchi di potenza entrante senza per questo subire un
sensibile innalzamento della temperatura, ed è per questo che di solito i moduli di potenza sono progettati in modo da avere una adeguata capacità di
immagazzinare energia termica.
Contenuti del lavoro
Pa
1.4
1.4.1
Argomenti
Dalle precedenti considerazioni emerge che il problema in questione è
scomponibile in due parti principali: la determinazione della sorgente del
calore e lo studio su come esso influenza il campo di temperatura del sistema.
Volendo rappresentare con uno schema a blocchi la struttura del problema
si potrebbe disegnare qualcosa di simile alla figura 1.5.
Le caselle blu corrispondono agli argomenti da sviluppare per poter descrivere opportunamente il problema.
La parte che ha a che fare con la determinazione della sorgente del calore sottintende lo studio del legame tra le grandezze elettriche ai morsetti
esterni del dispositivo e le condizioni di funzionamento, ovvero la politica di
pilotaggio del dispositivo e le caratteristiche del sistema elettrico nel quale è
inserito, in particolare il comportamento del carico.
Introduzione - 1.4. Contenuti del lavoro
10
Riscaldamento
Trasmissione del calore
Proprietà termiche dei materiali
Modalità di funzionamento
• logica di pilotaggio
• circuito esterno
Tamb
Sistema termico
Grandezze elettriche sulle porte
del dispositivo
Pe
• struttura del modulo
• dissipatore
rte
• alimentazione
Tj
Modello del carico
Segnale di comando:
azionamenti pwm
Modello elettrico
del dispositivo
Figura 1.5: Schema a blocchi del problema
La parte primaria dello studio, che ha a che fare più direttamente con
l’aspetto termico consiste nell’indagine dei meccanismi di trasmissione del
calore del sistema e come siano influenzati dalla sua geometria.
1.4.2
Struttura
Pa
Il lavoro si struttura in una prima parte generale, il cui fine è, senza
alcuna velleità di completezza, fornire un compendio nozionistico riguardante
i due aspetti principali del problema: ci occuperemo anzitutto di calcolare
la potenza dissipata nei moduli di potenza, per poi esaminare le leggi che
regolano la conduzione del calore; infine verranno presi in considerazione i
sistemi elettronici di potenza, per i quali, dopo una rapida panoramica degli
studi riguardanti lo studio termico, verrà proposta una strada possibile per
ottenere una descrizione adeguata in questo contesto applicativo.
Nella seconda parte verrà reso in considerazione un sistema reale, sul
quale verificare la bontà delle considerazioni teoriche. In definitiva il lavoro
è così strutturato:
• Generalità sull’IGBT e sui moduli di potenza
• Generalità sulla trasmissione del calore
Introduzione - 1.4. Contenuti del lavoro
• Approccio al problema
11
· Letteratura
· Individuazione del modello più opportuno
· Individuazione del metodo di identificazione
• Implementazione del processo di ottenimento del modello
(
· Descrizione dell’apparecchio
• Un sistema concreto
· Descrizione del sistema di misura
· Misure statiche
rte
• Misure e simulazione
· Risposta al gradino e identificazione
· Ingresso intermittente: simulazione e meta-validazione
Pa
• Conclusione
Capitolo 2
rte
Sul componente di potenza
In questo capitolo viene descritto il protagonista di questo studio, l’IGBT, fornendo nozioni generali sulla sua struttura e funzionamento, ed anche sull’architettura dei moduli di potenza che li
contengono.
Pa
Con interruttore si intende un bipolo ideale, lineare, tempovariante, e
bistabile, caratterizzato cioè dal presentare due diverse caratteristiche elettriche a seconda del suo stato, e in grado di passare da uno stato all’altro in
un tempo nullo.
Allo stato di interdizione, corrisponde la caratteristica elettrica di un
generatore di corrente nulla (circuito aperto o resistenza infinita); nell’altro
stato, detto di conduzione, l’interruttore esibisce il comportamento di un
generatore di tensione nulla (corto circuito o resistenza nulla).
L’utilità di questa astrazione si chiarisce nella sezione seguente.
2.1
Sulle “valvole statiche”
Il principio di funzionamento della maggior parte dei convertitori elettrici
di energia, dagli alimentatori agli azionamenti elettrici, è basato su configurazioni di interruttori1 , in grado di aprire e chiudere il circuito a frequenze
molto alte.
Il ruolo principale dei dispositivi elettronici di potenza è proprio quello
di interruttore2 in queste applicazioni, dette di tipo switching; è quindi possibile svolgere alcune considerazioni generali a prescindere dalla loro strutO più propriamente valvole, perché di solito consentono sempre il passaggio di corrente
in un senso.
1
12
Sul componente di potenza - 2.2. Sull’IGBT
Pa
rte
tura interna e dalle particolari soluzioni tecnologiche che ne influenzano le
caratteristiche.
Gli interruttori elettronici hanno due porte elettriche: una di potenza,
dove viene realizzato l’interruttore, e l’altra di bassa potenza, dove viene
applicato il segnale di comando; in genere si presentano come dei tripoli.
Gli sforzi dei produttori di questi componenti sono volti ad avvicinare
il più possibile la caratteristica degli interruttori ideali al fine di diminuire le perdite interne, principale fattore che limita la potenza trasmessa e
l’affidabilità.
Se nello stato di interdizione la potenza persa è trascurabile, durante la
conduzione si avrà una dissipazione dipendente dalla caduta di tensione sulla
porta di potenza e dalla corrente richiesta dal carico. È da sottolineare che
una parte sostanziale delle perdite ha luogo durante il transitorio di commutazione, il quale, a dispetto delle condizioni ideali, richiede un tempo finito.
Nel corso delle fasi di accensione e spegnimento tensione e corrente sulla
porta di potenza assumono valori tali da avere picchi di potenza dissipata,
limitando così la frequenza operativa dell’interruttore elettronico.
Tipicamente migliorare le prestazioni in commutazione significa peggiorare quelle in conduzione: il miglior compromesso tra velocità e potenza dipende
dall’applicazione in cui deve essere impiegato il dispositivo.
Ormai la maggior parte dei sistemi di conversione, se non quelli di alta
potenza, fanno uso di dispositivi basati sulla tecnologia Metal Oxide Silicon
(MOS), il cui processo produttivo è ormai consolidato e consente una buona integrazione dei componenti; questi dispositivi sono avvantaggiati della
facilità di pilotaggio e del buon comportamento in commutazione.
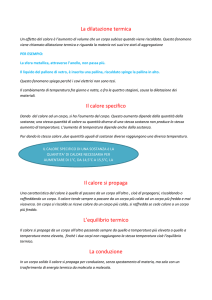
Se le applicazioni caratterizzate da alte frequenze di commutazione (fino
ed oltre 500kHz ) e basse potenze sono dominate dai transistori Metal Oxide Silicon Field Effect Transistor (MOSFET), quelle di media potenza sono
ormai dominate dagli IGBT, come si può osservare in figura 2.1 nella pagina
seguente.
13
2.2
Sull’IGBT
Disponibile sul mercato dal 1988, l’IGBT combina la capacità di sostenere
alte densità di correnti tipica dei dispositivi bipolari, con un buon comportamento in commutazione e la facilità di pilotaggio proprie dei dispositivi
MOS.
Spesso gli “elettrici” si riferiscono a questi dispositivi con il termine interruttori statici,
distinguendoli così dai congegni meccanici che realizzano lo stesso bipolo.
2
Sul componente di potenza - 2.2. Sull’IGBT
1 GW
14
Thyristor
100 MW
GTO/IGCT
10 MW
1 MW
IGBT
rte
100 kW
10 kW
MOSFET
1 kW
100 W
10 Hz
1 kHz
100 kHz
10 MHz
Figura 2.1: Panoramica del campo di applicazione dei dispositivi di potenza
(fonte: G.Joòs, Power Electronic Systems)
Pa
Grazie a questo ottimo compromesso, alla facilità di utilizzo in parallelo,
ed anche al fatto di condividere con i MOSFET la tecnologia produttiva e i
circuiti di pilotaggio, Gli IGBT hanno avuto una grande diffusione sostituendo
progressivamente i transistori bipolari (Bipolar Junction Transistor (BJT))
nei sistemi di conversione di media potenza (centinaia di kW ), lavorando
con frequenze di commutazione fino a 20kHz (ed oltre in applicazioni softswitching); sono inoltre allo studio sistemi di potenza oltre il 1MW .
Questa natura ibrida motiva l’uso di indicare i corrispondenti morsetti di
drain e source come collettore ed emettitore; il simbolo circuitale adottato in
questo documento (figura 2.2) evidenzia lo stretto legame con il transistore
bipolare.
Il dispositivo che stiamo considerando è un tripolo, quindi caratterizzato
elettricamente, in regime quasistazionario, dalle tensioni e correnti presenti
sulle tre porte elettriche; queste sei grandezze sono legate dalle due relazioni
di Kirchhoff, quindi si hanno solo due due porte elettriche indipendenti; di
solito si considerano quelle rappresentate in figura 2.2, dove si può distinguere
la porta di comando e quella di potenza.
Esaminiamo ora in modo sommario la struttura ed il funzionamento di
questo dispositivo (si veda ad esempio [BGG99], oppure [MUR95]).
Sul componente di potenza - 2.2. Sull’IGBT
15
Cb
IC
b
rte
G
VCE
IG
VGE
b
E
Figura 2.2: Porte elettriche dell’IGBT
2.2.1
Struttura e funzionamento
Per completezza ed a vantaggio del lettore descrivo in modo discorsivo
e senza alcuna velleità di completezza la struttura e il principio di funzionamento dell’IGBT, focalizzando l’attenzione sugli aspetti che potrebbero far
comprendere meglio alcuni punti di questo documento.
Struttura
Pa
Come si può vedere in figura 2.3 nella pagina successiva la struttura della
cella elementare dell’IGBT a canale n ottenuto per diffusione verticale è molto
simile a quella del MOSFET, ad eccezione di uno strato p+ posto nella regione
di drain.
Questo strato forma con lo strato sovrastante la giunzione pn J1 , che
inietta portatori minoritari nella regione di drift, dando luogo al fenomeno
della modulazione di conduttività, che consente all’IGBT di sopportare delle densità di corrente venti volte maggiori rispetto alla struttura MOSFET
equivalente.
Lo stato di conduzione e interdizione del dispositivo è controllato, come
nel MOSFET, dalla tensione di gate, ossia la differenza di potenziale tra gate e
drain. Se questa tensione è minore di una certo valore di soglia non si crea lo
strato di inversione e il dispositivo è interdetto; pur applicando una tensione
diretta tra collettore ed emettitore fluirà tra essi solo la piccola corrente
di dispersione della giunzione J2 inversamente polarizzata. Poiché tutta la
16
rte
Sul componente di potenza - 2.2. Sull’IGBT
Figura 2.3: Struttura dell’IGBT verticale (fonte: [MUR95])
Pa
tensione applicata cade su di essa, il valore massimo di tensione diretta1 che
è possibile bloccare dipende dalla tensione di rottura di questa giunzione ed
è quindi strettamente legata alla concentrazione dei droganti nella regione
n di deriva: minore è il drogaggio, maggiori sono le dimensioni della zona
di svuotamento e quindi la tensione di rottura, e, naturalmente, peggiori le
prestazioni in conduzione.
In alcuni IGBT, come quello in figura 2.3, detti Punch Through (PT), viene
aggiunto uno strato “tampone” n+ (buffer layer) tra la zona p+ del drain e la
regione di deriva (drift region), che impedisce alla zona di svuotamento della
giunzione J2 di invadere il collettore, consentendo di minimizzare lo spessore della regione di deriva migliorando il comportamento in conduzione ma
limitando notevolmente la tensione diretta che è possibile bloccare; inoltre la
presenza di questo strato favorisce la ricombinazione dei portatori minoritari durante lo spegnimento, diminuendo il tempo necessario per passare allo
1
forward breakdown voltage
Sul componente di potenza - 2.2. Sull’IGBT
17
stato di interdizione.
Conduzione
rte
Applicando una tensione positiva tra il gate e l’emettitore maggiore del
valore di soglia si innesca la transizione verso lo stato di conduzione: si forma lo strato di inversione che permette all’emettitore (source) di immettere
elettroni nella regione di deriva, mentre il collettore inietta dall’altro lato
lacune. Una pregevole rappresentazione del percorso dei portatori di carica è
in figura 2.4.
Emitter
+
A´ Gate
B´
Emitter
+
Al
SiO2
-
+
+
+
n+
d
-
p-
-
p+ +
+
p-
+
+
-
p+
-
-
+
+
-
+
+ -
+
+
+
+ -
+
+
+
+ -
+
+
+
+ -
+
+
+
+ -
+
np+
2
3
1
B
+
1
+
3
np+
2
A
+ -
Collector
-
+
+
Pa
Figura 2.4: Percorso dei portatori di carica durante la conduzione (fonte: [SEM])
Questo meccanismo porta ad avere una elevata concentrazione di portatori liberi nella regione di deriva e quindi di esibire un comportamento da
conduttore.
Il comportamento in conduzione è sintetizzato nel primo quadrante della
caratteristica elettrica esterna statica in figura 2.5 nella pagina successiva (a),
dove si distinguono due regioni di funzionamento distinte.
Per una tensione di gate VGE di poco superiore al valore di soglia, la
corrente di collettore IC è indipendente dalla tensione collettore-emettitore
VCE ma è legata al valore di VGE con una relazione univoca del tipo riportato
in figura 2.5 nella pagina seguente (b), dove si può distinguere la definizione
della transconduttanza diretta gf s , in analogia al MOSFET.
In queste applicazioni dove si vuole che il dispositivo approssimi la caratteristica di un interruttore bisogna evitare assolutamente il funzionamen-
18
Avalanche-Breakdown
IC
Active Region
Saturation Region
Sul componente di potenza - 2.2. Sull’IGBT
IC
gfs=
rte
VGE
∆ IC
∆VGE
VCE
V < VGE(th)V(BR)CES
Forward BlockingGE
Characteristic
-VCE
IGBT without hybride
Antiparallel-Diode
a)
VGE(th)
VGE
b)
IGBT with hybride
Antiparallel-Diode I (-I )
F
C
Figura 2.5: Caratteristiche esterne dell’IGBT (fonte: [SEM])
Pa
to in questa regione, detta attiva (active region), date le elevate dissipazioni termiche che comporta; è chiaro però che essa è attraversata durante la
commutazione.
Lo stato di on dell’interruttore è ben approssimato dalla regione di saturazione (saturation region), dove la caduta di tensione VCE è minima e,
tipico dei dispositivi bipolari, poco sensibile alla corrente di collettore, determinata dal circuito esterno; questo regime di funzionamento si raggiunge per
tensioni di gate ben oltre la soglia, ed è caratterizzato dal valore della caduta
di tensione in saturazione, che per quanto detto è sensibilmente minore di
quella del MOSFET.
Circuito equivalente e fenomeni parassiti
Alcune delle lacune iniettate si ricombineranno nella regione di deriva,
ma altre diffonderanno fino all’opposta regione p (➁ in figura 2.4). L’IGBT
può quindi essere assimilato ad un transistore bipolare pnp la cui corrente di
base è fornita da un MOSFET attraverso la regione di deriva, così i modelli
circuitali di questo dispositivo hanno la struttura di figura 2.6 nella pagina
successiva, dove oltre al MOSFET e il BJT pnp in configurazione Darlington si
Sul componente di potenza - 2.2. Sull’IGBT
19
può notare il transistore parassita npn formato dalla zona n del source, dalla
adiacente zona p (body) e dalla regione di deriva.
C
rte
RMOD
RBE
G
Figura 2.6:
E
E
Un circuito equivalente dell’IGBT (fonte: Mitsubishi)
La RBE rappresenta la resistenza trasversale della zona p, la cui caduta
di tensione può polarizzare direttamente il transistore parassita causando una
elevata iniezione di elettroni nella regione p; questo fenomeno, detto latch-up,
porta il dispositivo fuori controllo e, probabilmente, alla sua distruzione.
Un modello circuitale più preciso e il suo legame con la struttura è riportato in figura 2.7, dove sono evidenziati gli effetti capacitivi di cui parleremo
affrontando la commutazione.
Gate
Emitter
Pa
Emitter
CGE
RG
C
(Collector)
Al
SiO 2
n+
RW
p-
CGC p
-
p+
RD
CGC
CCE
RG
G
(Gate)
CCE
np+
a)
RD
p+
CGE
RW
np+
Collector
(Emitter)
E
b)
Figura 2.7: Un modello circuitale più accurato e la corrispondenza con la
struttura (fonte: [SEM])
Sul componente di potenza - 2.2. Sull’IGBT
20
Il transistore npn fa parte del tiristore parassita evidenziato in figura 2.3
a pagina 16; per ridurre il rischio che esso si attivi causando il latch-up si
cerca di minimizzare la resistenza trasversale RBE e si usano tecniche di
controllo del tempo di vita dei portatori minoritari per ridurre il guadagno
del componente parassita.
2.2.2
Commutazione
Pa
rte
Il passaggio tra gli stati di interdizione e conduzione comporta picchi
di dissipazione di potenza, come già osservato infatti per tensioni di gate
vicine al valore di soglia il dispositivo funziona in zona attiva, dove tensione e
corrente della porta di potenza possono essere contemporaneamente elevate.
Le perdite in commutazione spesso rappresentano la parte preponderante
delle perdite totali, influenzando quindi pesantemente la modalità di lavoro
del dispositivo.
b
Durante la commutazione dell’IGBT
si possono distinguere le due diverse dinamiche associate al MOSFET e
L
al BJT dei quali lo possiamo pensaR
re composto. Come ci si può aspettare la parte iniziale dei transitori
bc
VDC
hanno tratti molto simili a quelli dei
IC
MOSFET.
La dinamica più veloce è quella
VCE
g
relativa al segnale di comando, legab
ta alle capacità ed alla resistenza di
be
gate. Dal punto di vista del circuito
b
V
GE
di comando l’IGBT appare come una
maglia rc alla quale deve essere for- Figura 2.8: Un IGBT che comanda un
carico induttivo
nita e rimossa nel più breve tempo
possibile una certa quantità di carica.
Minore è il valore della resistenza, minore sarà il tempo di stabilizzazione
della tensione di gate, maggiore la corrente che il circuito di pilotaggio dovrà
essere in grado di erogare per caricare e scaricare le capacità.
Molte applicazioni richiedono all’IGBT l’apertura e la chiusura forzata
(hard switching) di carichi di tipo induttivo (tipicamente motori), aventi costante di tempo molto maggiore del periodo di commutazione del transistore.
Descriviamo in queste condizioni le fasi della commutazione di un IGBT,
riferendoci alla configurazione di figura 2.8.
Sul componente di potenza - 2.2. Sull’IGBT
21
Accensione
rte
Applicando una tensione positiva2 alla porta di comando gate-emettitore,
la tensione di gate sale con un andamento esponenziale che come già anticipato dipende essenzialmente dal valore della resistenza di gate RG e dalla capacità gate-emettitore CGE ; la capacità di Miller CGC è molto piccola a causa
degli alti valori di tensione sulla porta di potenza (collettore-emettitore).
Quando la tensione di gate raggiunge il valore di soglia (istante t1 in
figura 2.9), la corrente tra collettore ed emettitore comincia a salire con un
andamento lineare. Se il diodo di ricircolo del carico è ancora polarizzato
direttamente, durante questa fase la tensione collettore-emettitore VCE è
circa uguale alla tensione di alimentazione VDC .
VGth
VG
IL
IC
.VDC
Pa
VCE
VCE on
t1
t2
t3
t4
Figura 2.9: Grandezze elettriche all’accensione dell’IGBT
Quando il diodo si polarizza inversamente la VCE comincia a decrescere
(istante t2 in figura 2.9); in questa fase si possono distinguere due intervalli,
uno corrispondente al passaggio nella regione attiva e l’altro nella regione
ohmica. Mano a mano che la VCE si fa piccola l’effetto della capacità di
Miller si fa rilevante; quando essa si scarica completamente la tensione di
gate aumenta e l’IGBT entra in saturazione piena (istante t4 in figura 2.9).
È importante osservare che il comportamento in commutazione è strettamente legato alla tensione di gate secondo leggi ben definite; questa caratteristica, ereditata dal MOSFET, permette ad esempio di limitare la rapidità
2
Pensiamo a dispositivi a canale n
Sul componente di potenza - 2.2. Sull’IGBT
22
di variazione della corrente e della tensione della porta di potenza attraverso una retroazione sulla porta di comando, evitando di aggiungere circuiti
limitatori esterni.
rte
Spegnimento
VGth
VG
IL
IC
.VDC
VCE on
VCE
t1
t2
t3
t4
Figura 2.10: Grandezze elettriche allo spegnimento dell’IGBT
Pa
Applicando un segnale di tensione negativo alla porta di comando si osserva che la tensione di gate VGE decresce in modo approssimativamente
lineare; quando viene oltrepassata una soglia minima (istante t1 in figura 2.10) il canale tra collettore ed emettitore diverrà meno conduttivo e la
relativa caduta di tensione comincerà ad aumentare, anch’essa linearmente.
Nel frattempo la corrente di collettore tenderà a mantenersi inalterata a causa dei fenomeni induttivi, fino a quando la tensione VCE non raggiunge la
tensione continua di ingresso VDC (istante t2 in figura 2.10). Quando ciò
accade il diodo di ricircolo del carico entra in conduzione e IC comincerà a
decrescere; anche qui si possono riconoscere due diversi intervalli. Al primo
tratto, corrispondente allo spegnimento della parte MOSFET, segue una coda
di pendenza minore dovuta alla parte BJT (istante t3 in figura 2.10), corrispondente allo svuotamento della carica dei portatori minoritari nella zona
di deriva, che può avvenire solo per ricombinazione. È proprio questa coda,
tipica dei dispositivi bipolari, che rende maggiori le perdite di turn off e che
limita la frequenza di commutazione del dispositivo.
Sul componente di potenza - 2.2. Sull’IGBT
rte
In proposito è interessante osservare che rendere minore il tempo di vita
dei portatori in eccesso nella zona di deriva significa diminuire il tempo di
spegnimento e quindi le perdite di commutazione, aumentando però la caduta
di tensione in conduzione e quindi le relative perdite. Questo compromesso
spiega la presenza in commercio di IGBT cosiddetti veloci, ottimizzati cioè
per lavorare ad alte frequenze di switching, e IGBT low-loss, ottimizzati per
applicazioni lente, come quelli usati nelle unità di frenatura.
Come già anticipato il tempo di rimozione delle cariche in eccesso può
notevolmente essere migliorato grazie ad uno strato aggiuntivo n+ posto sopra il collettore (struttura PT): l’elevato tasso di ricombinazione rispetto
l’adiacente zona di deriva provoca un gradiente di densità delle lacune e
quindi un flusso di diffusione uscente che migliora notevolmente il tempo di
svuotamento.
23
Fenomeni parassiti
Pa
In figura 2.11 si possono osservare degli andamenti più realistici di VCE
e IC durante la commutazione, che testimoniano la presenza di fenomeni
parassiti di cui non avevamo tenuto conto.
Figura 2.11: Commutazione dell’IGBT vista all’oscilloscopio (fonte: Eupec)
La sovraelongazione della corrente di collettore in accensione è dovuta
alla corrente di recupero del diodo di ricircolo che si spegne, mentre durante
il turn-off si può notare un picco della tensione tra collettore ed emettitore, dovuto al rilascio dell’energia magnetica immagazzinata dalle induttanze
parassite.
La caduta di tensione sulle induttanze parassite è dipendente dalla rapidi
dità di variazione della corrente di collettore ( dt
), che può essere controllata
Sul componente di potenza - 2.2. Sull’IGBT
rte
attraverso il segnale di comando, in particolare agendo sulla resistenza di gate. Una variazione di corrente troppo rapida ha effetti molto negativi sul buon
funzionamento del dispositivo: essa potrebbe dar luogo a sovratensioni sulle
induttanze non sopportabili dal dispositivo, inoltre la caduta sull’induttanza
parassita comune di emettitore si sovrappone alla tensione di comando, circostanza molto pericolosa; queste sovratensioni possono inoltre avere un cattivo
effetto sulla corrente di recupero del diodo in antiparallelo, che a sua volta
di
si agisce aumentando
può causare pericolose sovratensioni. Per limitare dt
la resistenza di gate, quindi peggiorando il tempo di commutazione.
Il valore della resistenza di gate ha un marcato effetto sulle prestazioni
dinamiche dell’IGBT. Se un valore basso consente di caricare e scaricare più
velocemente le capacità di gate consentendo di ridurre il tempo di commudi
tazione e quindi le perdite, esso può dare luogo a dt
troppo elevati ed a
oscillazioni tra le induttanze delle connessioni e le capacità in ingresso.
La corrente massima di collettore è fissata in modo da evitare il latchup del tiristore parassita, in base alle condizioni dinamiche peggiori; corrispondentemente viene specificato un valore massimo della tensione di gate per limitare le sovracorrenti dovute ai guasti, forzando il funzionamento nella regione attiva dove la corrente si mantiene costante al variare di
VCE ; ovviamente questa condizione di funzionamento, caratterizzata da alte
dissipazioni, è sopportabile solo per pochi istanti.
24
2.2.3
Gli effetti della temperatura
Pa
La temperatura influenza pesantemente il comportamento elettrico dei
semiconduttori.
Come già accennato i dispositivi a conduttore cessano di funzionare nel
modo preordinato se la temperatura di funzionamento è troppo elevata; in
[SWF98] si è osservato che la temperatura di giunzione operativa per IGBTs
PT, anche se dipendente dalle condizioni di lavoro, si può collocare nell’intervallo 115 ÷ 170◦ C , mentre per quelli di tipo Non Punch Through (NPT),
termicamente più stabili, può superare i 200◦ C .
Senza considerare valori tali da pregiudicare totalmente il funzionamento,
gli effetti dell’incremento di temperatura di giunzione nei transistori IGBT si
traduce in un generale peggioramento delle prestazioni.
La caduta di tensione diretta e quindi le perdite in conduzione crescono negli IGBT di tipo NPT in modo proporzionale alla temperatura (mentre decrescono nei PT), circostanza che evita il rischio di fughe termiche
nell’esercizio in parallelo di più dispositivi.
Con la temperatura aumenta il tempo necessario alla commutazione, in
particolare le perdite in fase di spegnimento possono aumentare in modo
Sul componente di potenza - 2.2. Sull’IGBT
25
rte
significativo a causa dell’accentuamento della coda finale di corrente (tailing
effect), così come avviene nei BJT; questo significa avere una grave instabilità
termica per dispositivi spinti alle frequenze di funzionamento limite.
Un altro effetto pericoloso dell’aumento di temperatura è la diminuzione
della tensione di soglia di accensione (e anche della transconduttanza che
lega la tensione di comando alla corrente di collettore), facendo aumentare il
rischio di accensioni non volute.
Tipicamente per evitare questi rischi i produttori raccomandano una
temperatura di funzionamento massima di 125 ÷ 150◦ C .
2.2.4
Potenza dissipata
Il fine ultimo che motiva queste considerazioni sul dispositivo di potenza
è il calcolo di quanta potenza esso assorbe, degradandola in calore al suo
interno. Con le convenzioni della figura 2.2 la potenza elettrica entrante nel
dispositivo è data da:
Pe = VGE IG + VCE IC ≃ VCE IC
(2.1)
Pa
La potenza scambiata attraverso il gate ha un valore relativamente piccolo
e la trascuriamo; bastano quindi le grandezze elettriche sulla porta di potenza
per caratterizzare lo scambio di potenza elettrica col mondo esterno.
Lo schema di figura 2.12 suddivide le perdite nel dispositivo in base allo
stato di funzionamento, ricordando il fatto che oltre alla potenza necessaria
al comando anche la corrente inversa nello stato di interdizione è in genere
trascurabile.
Questa classificazione evidenzia i due principali termini che compongono
le perdite nel chip dell’IGBT: conduzione e commutazione.
La potenza persa nel diodo di ricircolo in parallelo all’IGBT (free-wheeling
diode) può essere scomposta nei termini visualizzati nello schema di figura 2.13.
Anche per il diodo si possono ritenere trascurabili le perdite nello stato di
interdizione3 ; le perdite in fase di spegnimento (che ha luogo quando l’IGBT si
accende) sono dovute al processo di svuotamento delle cariche, che comporta
l’assorbimento di una corrente di recupero; nei diodi veloci spesso è possibile
trascurare questo termine.
È da puntualizzare che questo potrebbe non essere vero per i diodi Schottky, la cui
corrente inversa è fortemente dipendente dalla temperatura.
3
Sul componente di potenza - 2.2. Sull’IGBT
Statiche
(static
losses)
Perdite
IGBT
Pilotaggio
(driving
losses)
(IGBT
losses)
Conduzione
(on-state
losses)
Interdizione
(blocking
losses)
Accensione
(turn-on
losses)
rte
Commutazione
(switching
losses)
26
Spegnimento
(turn-off
losses)
Figura 2.12: Classificazione delle perdite nell’IGBT
Statiche
(static
losses)
Conduzione
(on-state
losses)
Interdizione
(blocking
losses)
Perdite diodo
(diode losses)
Pa
Dinamiche
(switching
losses)
Accensione
(turn-on
losses)
Recupero
(recovery
losses)
Figura 2.13: Classificazione delle perdite nel diodo di ricircolo
Perdite in conduzione
Le perdite di conduzione dell’IGBT e del diodo sono date dal prodotto
della caduta di tensione diretta del dispositivo per la corrente assorbita dal
carico.
Visto che le cadute di tensione diretta dell’IGBT e del diodo sono in genere
piccole rispetto la tensione sul carico, la corrente che li attraversa dipende
ben poco dal loro comportamento elettrico ed è in sostanza fissata dalla linea
di alimentazione e dal carico stesso.
Grazie alla modulazione di conduttività la caduta di tensione diretta di
Sul componente di potenza - 2.2. Sull’IGBT
rte
questi dispositivi varia meno che linearmente al crescere della corrente (figura 2.5 a pagina 18), tanto da approssimarla costante in calcoli di massima
che riguardano variazioni limitate di corrente4 .
La caratteristica di uscita VCE (IC ) oltre che dipendere dalla tensione
di comando VGE è influenzata dalla temperatura di giunzione, ma questa
dipendenza è raramente messa in conto negli usuali calcoli, anche perché
solitamente i produttori nel fornire questi dati considerano un solo valore
di temperatura corrispondente alla condizione peggiore di funzionamento (di
norma 125◦ C ).
Riassumendo il calcolo della potenza dissipata durante la conduzione comporta la determinazione della corrente del carico e la conoscenza del primo
quadrante della caratteristica di uscita VCE (IC ) , corrispondente alla tensione
di comando dell’IGBT.
Poiché durante la conduzione dell’IGBT il diodo è interdetto, la potenza
persa in esso è trascurabile.
27
Perdite in commutazione
Pa
Per visualizzare invece cosa accade durante la commutazione è illuminante
osservare il grafico di figura 2.14 nella pagina successiva, che visualizzato il
prodotto tra tensione e corrente durante l’accensione e lo spegnimento di un
carico induttivo, e dove tra l’altro è visibile la usuale definizione dell’intervallo
di commutazione.
In esso si possono notare i picchi di potenza dissipata durante i transitori
rispetto il valore ben più basso durante la conduzione; l’area di questi picchi
corrisponde all’energia assorbita.
Per prevedere cosa accade durante questi transitori non serve solo un modello dettagliato del dispositivo, ma anche la conoscenza del sistema elettrico
esterno; in genere l’unica via ragionevole per quantificare queste perdite è
affidarsi a misure dirette, oppure, quando questo non è possibile, alle misure
effettuate dal produttore stesso del modulo che tipicamente fornisce i valori di
energia persa durante l’accensione e lo spegnimento dell’IGBT ( Eon , Eof f ),
e l’energia di spegnimento o di recovery del diodo di ricircolo integrato nel
modulo ( Erec ); in genere questi valori sono forniti al variare della corrente
di collettore e della resistenza di gate, per un valore fissato della tensione di
alimentazione e della temperatura di giunzione.
Di solito per riportare il valore dell’energia persa per tensioni di alimentazione diverse da quella relativa alle curve riportate si usa un legame
Nell’IGBT considerato in questo lavoro VCE varia di un volt e mezzo per correnti di
collettore da 25A a 125A .
4
Sul componente di potenza - 2.2. Sull’IGBT
28
IC
n
VCE
d
10%
10%
10%
10%
rte
ESW(off)
ESW(on)
P = IC X VCE
Figura 2.14: Dissipazione di energia durante lo switching (fonte: Mitsubishi)
lineare:
VDC
= ElossV
)
DC
DCN
VDCN
Eloss(V
(2.2)
Note queste energie, la potenza dissipata media di commutazione durante
un regime intermittente di frequenza fc è stimabile con:
Pon/of f = fc Eon/of f
(2.3)
Pa
In mancanza di questi dati sperimentali forniti dal produttore è possibile
effettuare una stima in prima approssimazione dell’energia persa in commutazione nell’IGBT a partire dai valori della tensione tra collettore ed emettitore
durante lo stato di off ( VDC ) e la corrente assorbita dal carico durante lo stato
di on ( IL ), azzardando un valore del tempo di commutazione e ipotizzando
degli andamenti lineari:
Eon/of f =
VDC IL
ton/of f
2
Ovviamente se è necessaria una stima della potenza istantanea occorre
unire all’informazione riguardante l’energia persa quella relativa ai tempi di
commutazione. I produttori indicano i tempi di commutazione in condizioni
standard5 fornendo addirittura i tempi relativi alle dinamiche veloci (quelle
legate al MOSFET) e lente.
Carico induttivo, pilotaggio consigliato, tensione di alimentazione e corrente di
collettore nominali, temperatura di giunzione a 25◦ C e a 125◦C .
5
Sul componente di potenza - 2.2. Sull’IGBT
29
rte
In particolare vengono indicati i tempi di “reazione” al segnale di comando, definiti come l’intervallo di tempo tra quando la tensione di gate ha
raggiunto il 90% del valore di regime e la tensione tra collettore ed emettitore è cambiata del 10% del valore precedente; questi tempi si indicano di
solito con tdon (turn-on delay time) e tdof f (turn-off delay time).
Le dinamiche lente sono invece individuate dai tempi tr (rise time) e
tf (fall time), che indicano i tempi in cui la IC completa la transizione,
passando nel primo caso dal 10% al 90% del valore finale e nel secondo
caso dal 90% al 10% del valore iniziale.
I tempi totali di commutazione possono essere stimati sommando questi
parametri:
ton = tdon + tr
tof f = tdof f + tf
L’ordine di grandezza dei valori dei tempi di commutazione è attorno ai
decimi di microsecondo.
Perdite nell’IGBT
Con queste informazioni siamo in grado di rappresentare in qualche modo
la potenza istantanea dissipata dall’IGBT, ad esempio assumendo il profilo
rettificato illustrato in figura 2.15.
P
max
Pof
f
Pa
max
Pon
Eon
ton
Pcond
Eof f
tof f
t
Figura 2.15: Una stima della potenza istantanea dissipata nell’IGBT
In tal caso, volendo esprimere in linguaggio matematico la potenza du-
Sul componente di potenza - 2.2. Sull’IGBT
rante il turn-on (il turn off è speculare) si può scrivere:
max
Pon
∆t
, 0 < ∆t < tonr
tonr
Pon (t) =
P max − Pcond
− on
(∆t − ton ) + Pcond , tonr < ∆t < ton
tonf
30
(2.4)
Dove la potenza in conduzione e il picco in commutazione sono date da:
,
max
Pon
=
2 Eon − Pcond ton
ton
(2.5)
rte
Pcond = VCE(I) IC
In questa stima si è pensato di poter distinguere nel tempo di commutazione ton l’intervallo di salita tonr e di discesa tonf della potenza; senza
affliggersi troppo sul loro effettivo valore, questi potrebbero ad esempio essere
assunti identici.
Naturalmente il calcolo si può perfezionare adottando un profilo più realistico, usando ad esempio una funzione esponenziale per il fronte di discesa;
tuttavia è bene non dimenticare qual è il livello di approssimazione di questi
calcoli.
È da osservare che questo tipo di considerazioni, che si risolvono nel fissare
a priori l’andamento della potenza dissipata, perdono di senso se gli intervalli
tra le commutazioni sono minori dei tempi di commutazione stessi; del resto
una condizione di esercizio simile sarebbe a dir poco irragionevole.
Perdite nel diodo
Pa
Le perdite nel diodo hanno luogo durante le fasi transitorie che seguono
la commutazione dell’IGBT.
A seguito del turn on dell’IGBT il diodo si spegne e assorbe una potenza
stimabile in modo analogo alle potenze di commutazione dell’IGBT dal valore
dell’energia di recovery Erec e da una stima del tempo di recovery trec , anche
se il peso sul bilancio energetico di queste perdite è in genere molto più piccolo
di quelle dell’IGBT; il comportamento del diodo in turn off è importante
soprattutto per quanto riguarda il valore delle sovratensioni innescate dalla
brusca variazione di corrente.
Nella fase che segue il turn off dell’IGBT il diodo conduce la corrente
alimentata dall’induttanza del carico; la potenza istantanea dissipata sarà
data dal prodotto della caduta di tensione diretta sul diodo per la corrente
che lo attraversa, data dalla differenza tra la corrente di ricircolo del carico
e la coda di corrente assorbita dall’IGBT in fase di spegnimento:
PDcond = VDF (I) IDF = VDF (I) (IL − IC )
(2.6)
Sul componente di potenza - 2.2. Sull’IGBT
31
Mentre la caduta di tensione diretta può essere stimata usando la caratteristica di uscita del diodo fornita dal produttore, la corrente dipenderà dalle
caratteristiche del carico (volendo essere precisi, della maglia che forma con
il diodo).
L’andamento della corrente nel carico induttivo nella fase successiva lo
spegnimento non sarà tanto lontano da un’esponenziale decrescente, la cui
costante di tempo è data dalla resistenza e induttanza della maglia diodocarico, in genere approssimabili a quelle relative al solo carico:
t
IL = IL e− τ
rte
Dove IL è la corrente di regime. La corrente che attraversa il collettore dell’IGBT durante lo spegnimento può essere assunta, sulla spinta delle
approssimazioni fatte, come una retta decrescente:
t
IC = IL
−1
tof f
Le correnti così calcolate e la loro differenza sono rappresentate nel grafico
in figura 2.16.
I
b
IL
b
Pa
tof f
t
Figura 2.16: Corrente che attraversa il diodo durante lo spegnimento dell’IGBT
In definitiva le perdite nel diodo sono stimabili se si conosce l’energia
di recupero e la caratteristica di uscita del diodo, e la costante di tempo del
carico. Analogamente a quanto visto per l’IGBT, esse possono essere calcolate
come in figura 2.17 nella pagina successiva.
Una nota sulle misure dirette
In virtù dell’equazione (2.1), la potenza dissipata nel dispositivo potrebbe essere sperimentalmente determinata misurando con un oscilloscopio tensione e corrente tra collettore ed emettitore e facendo il prodotto dei due
andamenti.
Sul componente di potenza - 2.2. Sull’IGBT
P
32
b
Erec
b
b
on
4 ÷ 5 τL
t
rte
trec
off
Figura 2.17: Perdite nel diodo di ricircolo
Pa
Il verbo è coniugato nel modo congiuntivo perché la tensione e la corrente
effettive ai capi dell’IGBT non sono accessibili fisicamente a causa degli elementi parassiti: è chiaro quindi che la potenza misurata comprende anche la
potenza che questi elementi conservativi palleggiano con l’esterno.
Se quindi il valore istantaneo della potenza misurata non coincide con
quello della potenza dissipata, è da osservare che ipotizzando un regime periodico, per la conservazione dell’energia, le media temporali dovranno essere
le stesse.
D’altra parte, se è noto il comportamento termico statico del sistema, è
possibile stimare la potenza dissipata media attraverso misure di temperatura
all’equilibrio termico:
TAB
Pe =
Rth AB(T)
In questo lavoro sono utilizzati entrambe le strade come verifica della
bontà delle stime effettuate con i dati del produttore.
Sul componente di potenza - 2.3. Moduli di potenza
2.3
33
Moduli di potenza
Pa
rte
Le prestazioni e la robustezza dei componenti elettronici di potenza dipendono strettamente da come vengono fornite loro l’isolamento e le connessioni elettriche, il supporto meccanico, la protezione dall’esterno, il canale
per smaltire il calore: in una parola, dal packaging del componente.
In un modulo di potenza (IPEM) uno o più dispositivi a semiconduttore sono integrati su un supporto comune unito ad una piastra metallica di
dissipazione elettricamente isolata e protetto da un involucro plastico.
I moduli di potenza sono prodotti pensati per essere usati in produzioni
di massa, e perciò dovrebbero essere caratterizzati da una lunga vita, buona
affidabilità ed un basso costo.
L’affidabilità è intimamente legata alle prestazioni termiche; queste si
quantificano misurando la temperatura del die di silicio, data una certa
potenza dissipata: minore è la temperatura, migliore è il modulo.
Nonostante lo svantaggio di avere solo un lato a disposizione per la dissipazione termica, i moduli di potenza sono sempre più utilizzati per i numerosi
vantaggi che offrono, come la facilità di utilizzo, grazie al fatto che il dissipatore è elettricamente isolato, e la flessibilità delle funzionalità implementate,
nulla vieta infatti di integrare nello stesso modulo i circuiti di protezione e di
controllo (smart modules); non bisogna sottovalutare poi i bassi costi dovuti
alla produzione di massa.
C’è da dire che le prime produzioni di moduli avevano seri problemi di
affidabilità principalmente dovuti alla qualità della realizzazione dell’interfaccia di saldatura tra i vari materiali, messe alla prova dagli stress meccanici
dovuti ai cicli termici.
Le tipiche ragioni di guasto sono il formarsi di intercapedini d’aria nel
canale di dissipazione termica, che causano dannosi surriscaldamenti locali,
oppure il distaccamento dei fili di Alluminio usati per le connessioni elettriche
sui chip.
L’uso di materiali aventi coefficienti di espansione termica vicini ha migliorato di molto le cose; grandi passi sono stati fatti nella direzione dell’affidabilità a lungo termine dei moduli plastici, e la ricerca continua.
2.3.1
Architettura DCB
La struttura interna dei moduli di potenza deve equilibrare esigenze di
diversa natura, ad esempio dal punto di vista elettrico è necessario minimizzare le induttanze parassite delle connessioni interne, causa di pericolose
sovratensioni durante lo spegnimento; allo stesso tempo deve essere assicurato un adeguato isolamento tra i conduttori; dal punto di vista termico le
Sul componente di potenza - 2.3. Moduli di potenza
34
rte
zone attive devono essere il più congiunte possibile al dissipatore; dal punto
di vista meccanico serve una protezione dall’esterno e inoltre sarebbe ideale
che non ci esistessero sforzi interni alla struttura.
Una tecnologia costruttiva di grande impatto sulla robustezza e tempo di
vita dei moduli è l’architettura Direct Copper Bonding (DCB).
Attraverso un processo ad alta temperatura e pressione vengono fissate
delle lamine di rame ad uno strato isolante ceramico ( Al2 O3 o AlN ): il
fissaggio è così saldo da permettere sforzi interni tali che i due materiali
saranno soggetti alla stessa espansione termica. Gli spessori di queste lamine
sono dell’ordine di 300 µm .
Su un lato del substrato così ottenuto sono saldati i chips di silicio, mentre
l’altro lato viene unito mediante un materiale di saldatura eutettico alla
piastra metallica di smaltimento del calore baseplate) del case, tipicamente
costituita da uno spesso strato di Rame. Questa tecnica combina una buona
conduttanza termica verso l’esterno ed una alta tensione di isolamento.
Diode Chip
IGBT
Chip
Bonding Wire
Rame
Chip Solder
Al2 O3
DCB
Rame
solder
substrate
Baseplate
Pa
Figura 2.18: Struttura di un modulo DCB
Il silicio è quindi saldato allo strato metallizzato del substrato isolante, che
oltre fornire l’isolamento elettrico dalla piastra metallica esterna costituisce la
via principale per lo smaltimento del calore. Le connessioni elettriche interne
sono fornite dallo strato metallizzato e da filamenti metallici (bonding wires)
saldati sul lato superiore dei chips, annegati in un gel siliconico termicamente
conduttivo.
Questo sandwich di materiali differenti comporta diversi problemi di “convivenza”, ad esempio stress meccanici dovuti al differente coefficiente di espansione termica: cicli di riscaldamento-raffreddamento ripetuti possono causare
la separazione localizzata del substrato ceramico dalla base metallica, causando vuoti che ostacolano il flusso di calore verso l’esterno e che quindi
possono portare al danneggiamento definitivo del modulo; in proposito sono
eloquenti le immagini ottenute con l’ecografia ad ultrasuoni in [GSH97].
Sul componente di potenza - 2.3. Moduli di potenza
2.3.2
35
Caratterizzazione termica dei moduli
Vediamo come i produttori quantificano la qualità del canale di dissipazione termica dei moduli di potenza.
Resistenza termica
rte
Le prestazioni termiche dei moduli sono in genere quantificate con il rapporto all’equilibrio termico del il salto di temperatura tra tra le parti attive
del chip (giunzione) e la parte del modulo a contatto con l’esterno (case)
con la potenza dissipata costante che lo genera; questa quantità è chiamata
resistenza termica giunzione-case ( Rth jc ).
Tj − Tc
(2.7)
Pe
L’uso di questa grandezza è un modo grossolano ed estremamente pratico
(quindi diffuso ed abusato) per descrivere il comportamento termico statico
dei moduli; è bene osservare che esso sottintende una precisa modellizzazione del sistema in cui si suppone che il calore fluisca dal chip all’ambiente
attraverso un’unica via, ipotesi non sempre rappresentativa delle condizioni
reali.
Affinché la resistenza termica possa fungere da termine di confronto delle
performances termiche dei moduli di potenza è inoltre importante che essa
sia rilevata nelle stesse condizioni di misura, magari seguendo gli standard
proposti a livello internazionale1 .
La misura della resistenza termica è un concetto semplice in teoria ma
complicato in pratica, perché comporta la difficile rilevazione della temperatura di giunzione.
Uno dei fattori che più influenzano la resistenza termica è l’area del chip,
ovvero la dimensione della prima zona di diffusione del calore generato negli
hot spot del die. Come già accennato la struttura DCB offre una buona performance termica, ma ci si può chiedere quale sia il collo di bottiglia tra gli
strati costituenti la struttura.
La figura 2.19, presa da una pubblicazione di Semikron, dà un’idea di come
si distribuisce il salto di temperatura statico sui diversi strati costituenti un
modulo DCB con IGBT da 1200V , con substrato ceramico in Allumina e
piastra in Rame.
Come si può notare il contributo maggiore alla resistenza termica è dato dal substrato ceramico, la cui presenza è fondamentale per assicurare
l’isolamento elettrico con la piastra del case.
Pa
Rth jc =
1
Queste misure sono standardizzate da
JEDEC
nella serie di documenti
EIA/JESD
51.
Sul componente di potenza - 2.3. Moduli di potenza
36
10%
20%
Solder
8%
Baseplate
Cu
rte
6% Si
Al2O3
56%
Figura 2.19: Distribuzione del salto di temperatura in un modulo DCB ( Al2 O3 e
base di rame) da 1200V , area chip 9mm × 9mm (fonte: [SEM])
Impedenza termica
Pa
La resistenza termica fornisce informazioni solo sul comportamento statico del sistema; solitamente i produttori forniscono anche una misura del
comportamento termico dinamico del modulo attraverso la curva di impedenza termica (Transient Thermal Impedance Curve (TTIC)), che riproduce
la risposta temporale del salto di temperatura giunzione-case all’applicazione
di un gradino unitario di potenza dissipata, mantenendo il case a temperatura
costante.
Con impedenza termica ( Zth (t) ) si intende in effetti il rapporto tra il salto
di temperatura e la potenza fluente in regime transitorio; essa quindi definita
come:
Tj (t) − Tc
Zth jc(t) =
(2.8)
Pe(t)
È da osservare che le curve di impedenza termica pubblicate nei datasheets sono in genere maggiorate rispetto quelle effettive per tenere conto di
eventuali variazioni dovute al processo produttivo o al tempo.
Queste informazioni riguardano solo il percorso termico tra chip e case;
uno studio a livello di sistema complessivo deve essere svolto unendo le informazioni che riguardano il sistema di dissipazione esterno al modulo, in genere dipendente anche da fattori poco prevedibili come la resistenza termica
dell’interfaccia case-dissipatore.
Sul componente di potenza - 2.3. Moduli di potenza
37
La misura della temperatura di giunzione
Pa
rte
La misura della temperatura di giunzione è non è affatto semplice a causa della difficile raggiungibilità del punto di misura e alla sua particolare
sensibilità alle perturbazioni esterne a fronte della piccola capacità termica.
La misura diretta deve quindi essere svolta con sensori poco invasivi ed
elettricamente isolati, come i sensori ad infrarossi. Più frequentemente la temperatura viene rilevata attraverso misure indirette, sfruttando la sua influenza sul comportamento elettrico del dispositivo: individuato un parametro
elettrico facilmente misurabile e dipendente dalla temperatura (Temperature
Sensitive Parameter (TSP)), si procede alla rilevazione della relazione che lo
lega allo stato termico attraverso delle misure svolte portando il dispositivo
a temperature note (calibrazione).
Il parametro più comunemente usato è la tensione ai capi di una giunzione
pn polarizzata direttamente con una piccola corrente; nel caso di transistori
di potenza si utilizza la caduta di tensione diretta VCE o la tensione gateemettitore.
Uno dei vantaggi di questo metodo è che una volta eseguita la calibrazione
esso non richiede nessuna speciale modifica al dispositivo; lo svantaggio è
che il legame tra parametro elettrico e temperatura varia da dispositivo a
dispositivo e deve essere ogni volta determinato.
Capitolo 3
rte
Trasmissione del calore
In questo capitolo vengono illustrate alcune considerazioni teoriche sulla trasmissione del calore, in particolare sul fenomeno della
conduzione termica.
Pa
Il calore si trasmette attraverso tre meccanismi: per mezzo di onde elettromagnetiche, per mezzo di trasporto macroscopico di materia, e per mezzo
dell’interazione tra atomi o molecole che consente la diffusione dell’agitazione
termica.
I primi due modi coinvolgono fenomeni fortemente non lineari la cui trattazione teorica non è affatto semplice, e di cui nella maggioranza dei casi
si tiene conto solo attraverso risultati empirici, quando non vengono brutalmente linearizzati come in questo lavoro; grande importanza ha il terzo
meccanismo, che rappresenta l’unico modo di trasmissione tra le parti calde
e la superficie esterna del sistema.
3.1
Bilancio termico
Per scrivere le equazioni differenziali che governano la trasmissione del
calore e per meglio comprendere il significato delle grandezze termiche caratteristiche dei materiali, è utile partire scrivendo il bilancio energetico del
generico sistema delimitato da una superficie chiusa S che racchiude un volume V , nel quale è definito un campo scalare di densità di massa1 ρ , che
rende conto della materia che costituisce il sistema.
1
Kg · m−3
38
Trasmissione del calore - 3.1. Bilancio termico
39
Definito un campo scalare di densità di energia interna per unità di massa2
w , l’energia interna complessivamente immagazzinata sarà:
Z
W =
ρ w dV
(3.1)
V
rte
Se il sistema non è isolato la sua energia interna può variare in seguito a
scambi termici attraverso la frontiera; questi scambi possono essere descritti
con una grandezza che renda conto di quanto calore passa attraverso una
superficie in un certo tempo, rappresentata da un campo vettoriale della
densità di flusso di potenza3 q ; introdotto questo campo, se S è la superficie
di frontiera, l’energia accumulata dovrà diminuire nel tempo in conseguenza
al flusso di calore uscente dal volume:
Z
Z
d
ρ w dV = − q · n dS
(3.2)
dt V
S
L’energia interna inoltre può variare in seguito a conversione di energie
esterne all’interno del volume, rappresentabili da una densità volumetrica di
energia4 j sovente indicata come “sorgente” di calore; aggiungendo questo
termine alla (3.2) il bilancio termico del sistema è completo:
Z
Z
Z
d
ρ w dV =
j dV − q · n dS
(3.3)
dt V
V
S
| {z }
| {z } | {z }
energia
interna
sorgente
interna
potenza
termica
uscente
Pa
La (3.3) si può porre facilmente in forma locale ricordando che il flusso di
un campo vettoriale attraverso una superficie chiusa è calcolabile integrando
nel volume la divergenza del campo:
Z
Z
Z
d (ρw)
dV =
j dV −
∇·q dV
(3.4)
dt
V
V
V
E quindi, in forma locale:
d (ρw)
= j − ∇·q
dt
(3.5)
Per avere una descrizione completa bisogna poter quantificare in qualche
modo la densità di energia interna w e il calore fluente q .
J · Kg −1
3
−2
W · m−3 4
J ·m
2
Trasmissione del calore - 3.2. Conduzione
40
L’energia termica interna è ovviamente legata allo stato termico del corpo,
individuato dal campo di temperatura T ; di solito si esplicita questo legame
nel modo seguente:
w = cT
(3.6)
rte
Dove il coefficiente c , in generale dipendente dalla temperatura, è una
proprietà caratteristica del materiale detta calore specifico5 , misurata attraverso prove sperimentali.
In molti materiali, per variazioni di temperatura non elevate, c si può
considerare con buona approssimazione costante, quindi si può ritenere l’energia proporzionale alla temperatura.
Possiamo quindi scrivere il bilancio energetico per sistemi che accumulano
energia termica:
d (ρcT )
= j − ∇·q
(3.7)
dt
Per quanto riguarda il calore fluente q , esso dipenderà dal meccanismo
di trasmissione del calore; spendiamo qualche parola su questi meccanismi.
3.2
3.2.1
Conduzione
Legge di Fourier
Pa
I tipici esperimenti riguardanti il passaggio di calore nei solidi sono effettuati con lastre di materiale le cui pareti sono mantenute a temperature differenti; questa infatti è la tipica configurazione che per simmetria è
riconducibile ad un sistema unidimensionale.
Fourier mostrò che approssimativamente esiste una semplice relazione
di proporzionalità tra la potenza termica passante e il salto di temperatura
tra le pareti1 : la costante di proporzionalità rappresenta la facilità con cui il
sistema conduce il calore e quindi è detta conducibilità termica, la cui parte
indipendente dalle dimensioni del sistema rappresenta la capacità intrinseca
del materiale a condurre il calore, ed è detta conduttanza termica2 k :
dQ
S
= k
∆T
(3.8)
dt
l
J · Kg −1 · K −1
1
Proprio per questi studi sulla trasmissione del calore elaborò la teoria della
scomposizione
in serie
in seni e coseni delle funzioni continue periodiche.
2
W · m−1 · K −1
5
Trasmissione del calore - 3.2. Conduzione
41
In modo più generale e in forma locale questa legge si esprime così3 :
q = − k ∇T
3.2.2
(3.9)
Equazione del calore
rte
Unendo questa informazione al bilancio di potenza del sistema (3.7) otteniamo:
d (ρcT)
= j − ∇·(−k ∇T)
(3.10)
dt
In una regione dove la conducibilità non dipende dalle coordinate spaziali
e si possano ritenere densità e calore specifico costanti nel tempo si può
scrivere:
dT
ρc
= j + k ∇2T
(3.11)
dt
Dalla (3.11) si ottiene la forma con cui di solito si scrive l’equazione di
diffusione termica nei solidi, chiamata anche equazione del calore, nelle zone
esterne alle sorgenti4 ( j = 0 ):
dT
= k ∇2T
dt dT
∂2T ∂2T ∂2T
2
= κ∇ T = κ
+ 2 + 2
dt
∂x2
∂y
∂z
ρc
(3.12)
Pa
k
, che
Dove si è introdotto il coefficiente di diffusività termica5 κ = ρc
riassume le caratteristiche termiche del materiale.
L’equazione (3.12) consente di determinare il campo di temperatura lontano dalle sorgenti in un sistema dove il calore fluisce per conduzione, date
delle opportune condizioni al contorno; è questa equazione che viene integrata
con metodi numerici dai simulatori 3d.
Le condizioni che individuano le soluzioni della (3.12) possono essere
di tre tipi: può essere data ad esempio la condizione iniziale del campo di
temperatura:
T(x ,y,z ,0 ) = f(x,y,z)
Come si può notare è del tutto analoga alla legge di Ohm, che lega campo elettrico e
densità di corrente attraverso la conduttività elettrica:
3
j = σe = −σ∇v
Nel caso dei sistemi in esame il termine sorgente j è non nullo solo nelle regioni attive
del Silicio,
2 quindi
in una parte molto piccola del volume del sistema.
5
m · s−1
4
Trasmissione del calore - 3.2. Conduzione
Il valore di temperatura alla frontiera del sistema:
T(x ,y,z ,t) = f(x,y,z,t) (x,y,z)∈S
42
(3.13)
(x,y,z)∈S
rte
Oppure il calore scambiato alla frontiera, tipicamente usata per specificare
le pareti adiabatiche:
∂T(x ,y,z ,t) = qn
(3.14)
−k
∂n (x,y,z)∈S
Le non linearità della (3.12) sono dovute alla dipendenza dalla temperatura dei parametri termici, tuttavia per molti solidi questo effetto è contenuto
tanto che spesso non è un grave errore considerare costante la loro diffusività
termica. È da notare che questa approssimazione può essere troppo grossolana per materiali semiconduttori, a causa della marcata dipendenza della loro
conduttività termica con la temperatura.
Notiamo infine che le soluzioni stazionarie della (3.12) sono date dall’equazione di Laplace:
∇2T = 0
(3.15)
Le cui soluzioni sono indipendenti dalle caratteristiche termiche del sistema e dipendono solo dalle condizioni sulla frontiera.
3.2.3
Sistemi monodimensionali
Pa
I sistemi aventi simmetria assiale nei quali le isoterme, ossia le superficie
equipotenziali del campo di temperatura, coincidono con i piano normali
all’asse di simmetria, sono descrivibili con una sola coordinata spaziale perché
il gradiente di temperatura è esprimibile come:
∇T =
∂T
i
∂x
In questo caso l’equazione (3.12) diventa:
dT
∂2T
= κ 2
dt
∂x
(3.16)
Possono essere ricondotti a questa trattazione monodimensionale sistemi
modellizzabili con lastre indefinite, o con cilindri aventi pareti adiabatiche,
entrambi ovviamente composti da materiale omogeneo.
Trasmissione del calore - 3.2. Conduzione
43
Soluzioni stazionarie: resistenza termica
Le soluzioni stazionarie della (3.16) sono date da:
∂2T
= 0
∂x2
⇒
T = Ax + B
rte
Quindi si ha un profilo di temperatura lungo la coordinata spaziale rettilineo.
Vediamo una soluzione particolare immaginando il problema definito da
una lastra omogenea di spessore L nella cui parete sinistra x = 0 venga
iniettata una potenza costante Pe e la cui parete destra sia mantenuta a
temperatura costante Ta ; se S è la superficie delle pareti laterali queste
condizioni al contorno si esprimono così:
∂T
= PSe
−k
∂x x=0
T(L) = Ta
Quindi la soluzione è data da:
T(x ) = Pe
1
(L − x) + Ta
kS
Pa
Come si può notare, il salto di temperatura tra le pareti della lastra
dipende dalla potenza iniettata secondo una relazione piuttosto familiare a
noi elettrici6 :
1L
Pe
kS
Ecco quindi che scopriamo in forma integrale la similarità descrittiva che
accomuna i fenomeni della conduzione del calore e della conduzione elettrica.
Il coefficiente di proporzionalità tra la potenza fluente e il salto di temperatura è chiamato, in analogia ai fenomeni elettrici, resistenza termica.
Se fossimo interessati solamente al valore di temperatura in prossimità delle
pareti basterebbe la conoscenza della resistenza termica per caratterizzare
staticamente il comportamento termico del sistema.
T(0 ) − T(L) =
6
Chi non conosce la relazione costitutiva di un conduttore ohmico?
L
∆V = ρ I = RI
S
Trasmissione del calore - 3.2. Conduzione
44
Alla luce di queste osservazioni è facile constatare che le temperature
sulle pareti in un sistema multistrato costituito da più lastre sovrapposte
corrispondono alle tensioni ai capi delle resistenze termiche poste in serie
perché attraversate dalla stessa potenza fluente (figura 3.1).
R1
R2
R3
rte
Pe
∆T1
∆T2
∆T3
Figura 3.1: Temperature statiche delle pareti di un sistema multistrato
Soluzioni non stazionarie
Senza voler appesantire eccessivamente la trattazione, esploriamo in quale
forma si presentano le soluzioni non stazionarie della (3.16).
Ipotizzando a priori che il campo di temperatura sia esprimibile nella
forma:
T(x ,t) = X(x) Γ(t)
Pa
Riservandoci di tornare su questa assunzione nel caso non esistano soluzioni, sostituendo la forma della temperatura nella (3.16) otteniamo:
1 dΓ(t)
1 dX
=
X dx
κ Γ dt
Se il materiale è omogeneo e ha un comportamento termico indipendente
dalla temperatura, la diffusività κ è uniforme e costante, quindi esprimibile
con una costante reale. In tal caso l’equazione si può integrare col metodo
di separazione delle variabili, infatti l’unica condizione affinché l’uguaglianza
dei due membri sia sempre verificata è che entrambi siano costanti:
1 d2 X
= −ω 2
X dx2
dΓ(t)
1
= −ω 2
κ Γ dt
Trasmissione del calore - 3.2. Conduzione
45
La scelta di indicare la costante con la bizzarra forma −ω 2 è motivata dal
significato fisico che assume; questo spiega anche perché la pensiamo reale.
L’equazione alle derivate parziali si è quindi divisa in due equazioni differenziali ordinarie (ODE), le cui soluzioni sono ben note a qualsiasi ingegnere:
X(x) = A′ cos ωx + B ′ sin ωx
Γ(t) = C e−ω
2κ t
rte
Quindi la forma generale di un integrale della (3.16) è:
T(x ,t) = ( A cos ωx + B sin ωx) e−ω
2κ t
(3.17)
Per mostrare come si possa ricavare in modo analitico una soluzione non
stazionaria della (3.16), consideriamo un semplice problema omogeneo.
Pensiamo ad una lastra di materiale, di spessore L le cui restanti dimensioni sono indefinite e immaginiamo che essa sia a temperatura uniforme T .
Vediamo cosa succede se nell’istante t = 0 forziamo entrambe le pareti ad
avere temperatura nulla7 .
Questo problema corrisponde al problema di Dirichlet omogeneo, espresso
dalle condizioni:
T(x ,0 ) = T
(profilo iniziale)
(3.18)
T(0 ,t) = T(L,t) = 0 (condizioni al contorno)
Pa
Le condizioni al contorno nulle consentono di avere un problema omogeneo
e quindi semplice da trattare: applicandole alla (3.17) si ottiene che A deve
essere nullo e il semi-periodo del seno deve essere un sottomultiplo dello
spessore della lastra L , affinché sulle pareti la temperatura sia sempre nulla,
condizione che si esprime nel seguente modo:
n
π
= L
ω
⇒
ωn =
π
n
L
, n = 1, 2, 3, . . .
(3.19)
Quindi esistono infinite soluzioni indipendenti della (3.17), ognuna associata ad un numero naturale n :
2
Tn(x ,t) = ( Bn sin ωn x) e−ωn κ t
7
(3.20)
Il problema formulato potrebbe trovare applicazione nella tempra di lastre d’acciaio.
Trasmissione del calore - 3.2. Conduzione
46
Ogni soluzione possibile è quindi esprimibile, per il principio di sovrapposizione degli effetti, come combinazione lineare delle (3.20):
Tn(x ,t) =
∞
X
Bn sin
n=1
πn πn 2
x e−( L ) κ t
L
(3.21)
Le costanti Bn sono fissate dalla condizione iniziale:
Bn sin
n=1
L
πnx L
rte
T(x ,0 ) = T =
∞
X
Bn =
2
L
Z
0
T sin
πnx L
dx
Come si può notare l’espressione coincide con lo sviluppo in serie di
Fourier del profilo iniziale. Nel nostro caso i coefficienti sono pari a:
(
, per n pari
0
2T h πnx iL
Bn = −
cos
= 4T
πn
L
0
, per n dispari
πn
Quindi la soluzione del nostro problema è infine:
∞
2
2i+1
4T X 1
2i + 1
sin
πx e−( L π) κ t
T(x ,t) =
π i=0 2i + 1
L
(3.22)
Pa
Questa soluzione è rappresentata graficamente dalla superficie in figura 3.2, dove si vede il progressivo livellamento col passare del tempo del
profilo di temperatura nella lastra, inizialmente rettangolare.
Abbiamo quindi visto come si ottiene la soluzione al problema di Dirichlet
omogeneo dell’equazione del calore; con un procedimento molto simile si può
arrivare alla soluzione del problema omogeneo di Neumann, le cui condizioni
al contorno consentono di specificare il flusso di calore scambiato attraverso
l’interfaccia col mondo esterno (è chiaro che problema omogeneo significa
avere pareti adiabatiche); in genere è molto più frequente avere a che fare
con questo tipo di condizione.
Questo tipo di problemi sono i più semplici immaginabili; problemi poco più complessi richiedono metodi di integrazione molto più pesanti, rendendo allettante la strada dell’integrazione numerica o l’uso di descrizioni
semplificate.
L’equazione (3.22) mostra la forma della soluzione per il problema di
Dirichlet omogeneo, nella quale si può distinguere la dipendenza temporale costituita dalla somma di infiniti esponenziali, aventi costanti di tempo
Trasmissione del calore - 3.2. Conduzione
rte
47
Figura 3.2: Soluzione dell’equazione del calore per una lastra con frontiera a
temperatura nulla; l’asse temporale è uscente dal foglio
progressivamente più piccole:
T(x ,t) =
∞
X
Ai(x) e−(
2
2i+1
π κt
L
)
i=0
Pa
Poiché i coefficienti Ai(x) decrescono all’aumentare di i , gli esponenziali
più lenti hanno il peso maggiore. Se si dovesse approssimare questo sistema
di ordine infinito con un primo ordine, sarebbe quindi opportuno considerare
solo l’esponenziale più lento, corrispondente a i = 0 :
2
−( 2i+1
π) κ t L
e
i=0
−
= e
t
L2
2
π κ
t
= e− τ
La cui costante di tempo ha la forma:
τ ∝
L2
L2 ρc S
ρcSL
=
=
= Rth Cth
κ
k S
k LS
Riconosciamo la resistenza termica della lastra, incontrata ispezionando le
soluzioni stazionarie del sistema, e la capacità termica del volume di materiale
della lastra. Supponendo ancora di essere interessati solo alla temperatura
sulle pareti della lastra, abbiamo di fronte un transitorio relativo ad una rete
elettrica rc del primo ordine.
Trasmissione del calore - 3.2. Conduzione
48
Questo ragionamento, a dire la verità un po’ tirato per i capelli, può far
intuire il percorso che porta alle descrizioni semplificate dei sistemi termici
caratterizzate da equazioni formalmente identiche a quelle relative a reti costituite da resistori e condensatori. È da sottolineare che la discretizzazione
della equazione del calore non si applica solo a sistemi monodimensionali.
3.2.4
Modelli a parametri concentrati
rte
Come si può osservare l’equazione (3.16) è formalmente identica all’equazione della tensione in una linea di trasmissione caratterizzata dai soli8 fenomeni resistivi longitudinali e capacitivi trasversali:
∂v
1 ∂2v
=
r c ∂x2
∂t
Un buon ingegnere elettrico ricorda come questa equazione viene risolta
per separazione delle variabili, e come può essere discretizzata fino addirittura ottenere una semplice rete equivalente a T o a Π . Svolgiamo alcune
considerazioni generali in merito a questa analogia formale.
La conduzione del calore fa parte della vasta categoria di fenomeni fisici
di tipo diffusivo o propagativo i quali, limitandosi al caso lineare, possono
essere descritti mediante la forma generale:
∇ u = −z i
∇ i = −y u
Pa
In queste equazioni si possono distinguere i parametri distribuiti z e
y , che possono essere visti in termini elettrici, nel caso monodimensionale,
rispettivamente come l’impedenza e l’ammettenza per unità di lunghezza.
Queste equazioni ammettono una soluzione rappresentabile tramite l’analogia
elettrica e la trasformata di Laplace.
Quando la geometria del sistema è così semplice da consentire l’integrazione delle equazioni locali, è possibile ottenere un modello composto da
impedenze globali in forma esplicita: queste impedenze si possono esprimere nella forma di funzioni iperboliche (funzioni di Bessel ) e possono essere
Considerando anche i fenomeni induttivi longitudinali l (che in realtà sono quelli
prevalenti) e le conduttivi trasversali g , l’equazione completa ha la forma:
8
∂2v
∂2v
∂v
= cl 2 + (cr + gl)
+ gr v
2
∂x
∂t
∂t
Trasmissione del calore - 3.2. Conduzione
49
considerate come funzioni di trasferimento di ordine infinito. Ad esempio,
considerando sistemi monodimensionali, l’espressione:
r
z
√
Z =
tanh (L z y)
y
rte
rappresenta l’impedenza di una linea di trasmissione elettrica la cui estremità alla coordinata L è cortocircuitata, ma è anche la funzione di trasferimento tra la temperatura e il flusso di calore entrante in una lastra di
materiale di spessore L , la cui parete opposta è mantenuta a temperatura
nulla.
Questi modelli di ordine infinito comportano un onere computazionale
troppo elevato per molte applicazioni e spesso sono quindi preferiti dei modelli di ordine ridotto, ottenuti attraverso il troncamento di uno sviluppo in
serie della soluzione distribuita, il che si traduce nel far collassare in punti un
numero finito di regioni del sistema (si potrebbe definire una discretizzazione
spaziale) ottenendo così dei modelli rappresentabili con delle reti elettriche a
parametri concentrati.
Tornando all’analogia con le equazioni delle linee elettriche, risulta comprensibile come l’equazione del calore in sistemi monodimensionali possa essere rappresentata da una rete rc della forma visualizzata in figura 3.3, qualora
vengano discretizzate le dimensioni spaziali del sistema.
T1 Rth 1 T2 Rth 2 T3 Rth 3
b
Cth 1
b
Cth 2
Cth 3
Pa
Pi
b
Tn Rth n
b
Cth n
Tu
Figura 3.3: Rete equivalente del modello discretizzato
È da osservare che i parametri della rete in figura 3.3 hanno un significato
fisico ben preciso perché corrispondono alle resistenze e capacità termiche
relative alle regioni discretizzate del sistema termico, e quindi note queste
regioni essi possono essere determinati, se la struttura del sistema non è
troppo complessa, mediante ispezione. È stato mostrato ([Hef94],[BCCD98])
che la determinazione per ispezione visuale della rete equivalente ha buoni
risultati se:
• La divisione delle zone avviene in modo da avere costanti di tempo
progressivamente più grandi nella direzione del flusso termico
Trasmissione del calore - 3.2. Conduzione
50
• Si tiene conto dell’espansione laterale del flusso termico quando l’area
da dove proviene il calore è più piccola della sezione trasversale disponibile per la conduzione; di solito per materiali omogenei si considera
un angolo di allargamento pari a 40◦ . Per quanto riguarda l’effetto
capacitivo bisogna considerare tutto il volume della zona.
Questa interessante possibilità di identificazione, è attuabile per strutture
semplici, è ben illustrata in una immagine tratta da [MN99], in figura 3.4.
rte
„ Tj “
Cth1
Cth2
α
chip
Cth3
P
Rth1
A
Rth2
l th
d
Rth3
Cth4
Rth =
Rth4
solder
Cth5
d
λth ⋅ A
Rth5
Cth = c ⋅ ρ ⋅ d ⋅ A
Cth6
leadframe
Rth6
„ Tc “
Figura 3.4: Identificazione della rete termica per ispezione (fonte: [MN99])
Pa
Quantificati la sezione ed il volume interessati dal flusso di calore in
ogni zona di suddivisione del sistema è possibile determinare le rispettive
resistenze e capacità termiche:
1 li
ki Si
= ci ρi Vi
Rth i =
Cth i
(3.23)
(3.24)
È da notare che a seguito della discretizzazione del sistema l’energia interna immagazzinata dal sistema espressa dalla (3.1) è ora pari alla sommatoria:
X
W =
Cth i Ti
(3.25)
i
Questa rappresentazione semplificata dell’equazione del calore in sistemi
monodimensionali discretizzati rappresenta per un vasto campo applicativo
Trasmissione del calore - 3.3. Convezione e irraggiamento
51
un ottimo compromesso tra accuratezza e facilità di calcolo; questa qualità
la rende ampiamente utilizzata nello studio termico dei sistemi elettronici di
potenza.
3.3
Convezione e irraggiamento
rte
Sulla superficie esterna del sistema si innescano fenomeni fortemente
non lineari che determinano le condizioni al contorno delle soluzioni della
equazione del calore definita nel volume.
Queste condizioni avranno la forma di Neumann, espresse dalla (3.14),
specificanti il flusso di calore scambiato verso l’esterno.
I meccanismi di trasmissione che hanno luogo sulla frontiera sono due:
convezione e irraggiamento1 ; la condizione al contorno relativa alla superficie
interessata si esprime così:
∂T(x ,y,z ,t) = qconv + qrad
−k
∂n (x,y,z)∈S
Questi meccanismi sono piuttosto complessi; l’approccio teorico fornisce
risultati poco fruibili in questo contesto applicativo, per questo le trattazioni
dei meccanismi di irraggiamento e convezione sono trascurate a vantaggio
della conduzione.
3.3.1
Convezione
Pa
Un corpo caldo immerso in un fluido riscalda per conduzione il fluido
adiacente, il quale, se non è in stato di quiete, sottrae calore attraverso lo
spostamento macroscopico di materia.
Se il moto è imposto dall’esterno si parla di convezione forzata; in questo
caso la velocità caratteristica del sistema è indipendente dal salto termico, e
il calore scambiato per unità di superficie è in genere espresso per comodità
nella stessa forma della legge di Fourier :
qconv = h (T − T∞ )
(3.26)
Dove h , corrispettivo della conduttività termica (a parte una lunghezza),
è detto coefficiente di avvezione e viene in genere determinato attraverso
prove sperimentali.
1
A meno che il sistema non confini con un altro corpo solido.
Trasmissione del calore - 3.3. Convezione e irraggiamento
rte
Se il fluido ha una densità dipendente dalla temperatura, un gradiente
termico avente una componente ortogonale al campo gravitazionale genera
un moto dovuto alla forza di galleggiamento che agisce sul fluido di densità
minore. Se la sola causa del moto è dovuta a questo meccanismo si parla
di convezione naturale; in questo caso il moto del fluido dipende dal salto
termico e le equazioni che regolano il passaggio del calore sono fortemente
non lineari; nonostante questo il calore scambiato viene espresso secondo la
forma definita dalla (3.26).
Il calore scambiato per convezione dipende fortemente dalle condizioni
fisiche del fluido; è stato mostrato che lo stesso apparecchio scalda 20% in
più se fatto funzionare a 2500 m rispetto all’esercizio a livello del mare.
La temperatura ambiente oltre a determinare il salto termico, che ha
un impatto diretto sul calore scambiato, influisce sulle caratteristiche termiche del fluido; è stato mostrato che l’aria scambia calore più efficientemente
quando è calda (da 0◦ C a 100◦ C l’efficienza migliora del 20% ).
Considerazioni teoriche più approfondite sul meccanismo della convezione sono riportate nell’appendice C per non appesantire inutilmente il
documento; questi contenuti possono essere utili per sviluppi futuri.
52
3.3.2
Irraggiamento
Pa
Sulla frontiera del sistema il calore si trasmette all’esterno anche mediante
l’emissione di onde elettromagnetiche.
Un radiatore termico ideale, o corpo nero, emette energia proporzionale2
alla quarta potenza della sua temperatura assoluta del corpo e alla superficie
interessata. Il bilancio di potenza irradiata e ricevuta dal mondo esterno è
dato da:
4
qrad = ǫ σ T 4 − T∞
(3.27)
Dove T∞ è la temperatura del mondo esterno, pensato come una superficie lontana avente temperatura costante, mentre il coefficiente ǫ è chiamato
emissività ed è introdotto per tener conto che i corpi reali emettono meno di
un corpo nero.
Il totale calore scambiato sarà pari all’integrale sulla superficie del corpo
della equazione (3.27) e dipenderà dalla forma, dall’estensione e dall’emissività della superficie di interesse.
2
Secondo la costante di Stefan-Boltzmann:
σ = 5.729 · 10−8
W
m2 K 4
Trasmissione del calore - 3.3. Convezione e irraggiamento
53
Pa
rte
L’irraggiamento assume un peso rilevante in sistemi caratterizzati da alte
temperature di esercizio rivestendo un ruolo sostanziale per le applicazioni
n assenza di fluidi (come quelle spaziali); esso è in genere trascurabile per
sistemi in convezione forzata.
Capitolo 9
rte
Conclusione
In questo capitolo vengono tratte le conclusioni del lavoro e si
prospettano i naturali sviluppi futuri.
9.1
Sviluppi
Pa
Impiego real time
Un aspetto non trattato in questo lavoro è la riduzione dell’ordine del
modello e la sua discretizzazione nel tempo per ottenere equazioni alle
differenze utilizzabili per elaborazioni in tempo reale nel microcontrollore dell’azionamento. La parte più importante e interessante di questa
trattazione sarebbe l’implementazione dell’algoritmo di predizione della temperatura nei calcoli ciclici del microcontrollore e la valutazione
dell’errore confrontando i risultati per vari regimi di funzionamento del
dispositivo.
Blocchi della rete e regioni del sistema
Un altro aspetto non opportunamente approfondito da questo lavoro
è una indagine sulla non unicità delle reti Cauer equivalenti (fissato
un ordine) del sistema, esplorando meglio un metodo per stabilire il
legame tra i blocchi della rete Cauer ottenuta e le regioni fisiche del
sistema.
Calcolo delle perdite PWM
Non tutti gli strumenti proposti in questo lavoro sono idonei per descrivere in generale qualsiasi convertitore statico.
155
Conclusione - 9.2. Conclusioni
156
L’aver considerato un sistema particolarmente semplice, costituito da
un solo interruttore comandato con un segnale pulsante a periodo costante, ha permesso di focalizzare l’attenzione sulla parte termica: lo
script del calcolo delle perdite si basa infatti sull’assunzione che gli
istanti di commutazione siano equispaziati in modo fisso, permettendo
una facile costruzione dell’array della potenza dissipata istantanea.
rte
Questo lavoro quindi apre la strada allo studio di sistemi più complessi,
ai quali potranno essere estesi i risultati ottenuti, benché essi richiederanno un ulteriore approfondimento di aspetti del problema quali
la dissipazione di potenza per azionamenti PWM, ed in particolare la
modifica dello script del calcolo delle perdite.
Analisi FEM
Una grave mancanza di questo lavoro è l’impossibilità di validare in
modo diretto la temperatura di giunzione dei dispositivi; in merito
si potrebbe pensare di colmare, almeno parzialmente, questa lacuna
attraverso simulazioni tridimensionali FEM.
9.2
Conclusioni
Pa
In questo lavoro è stato proposto un metodo system level per ottenere una
descrizione termica di convertitori statici basati su moduli di potenza, considerando in particolare la configurazione più semplice, alla base di qualsiasi
applicazione switching.
La descrizione ottenuta mostra, a livello di predizione della temperatura
dell’involucro del modulo, una prestazione accettabile e in linea con il grado
di approssimazione preventivato.
La facilità della modalità di identificazione, la quale comporta solamente
una semplice misura della risposta al gradino della temperatura del case del
modulo e la raccolta di alcuni parametri standard disponibili nei datasheets,
e la semplicità di implementazione e calcolo, fanno del metodo proposto una
strada ragionevole da seguire per la descrizione termica a livello di sistema
dei convertitori statici.
Appendice A
rte
Ulteriori informazioni
In questa appendice sono raccolti ulteriori dati e informazioni che per
questioni di snellezza non hanno trovato spazio nel testo principale.
A.1
Sulle simulazioni
Le simulazioni effettuate per validare il modello, i cui risultati esposti
in questo documento sono in verità solo una piccola parte, sono compiute
R
con MatLab
ed in particolare attraverso la comoda funzione lsim. Lo script
attraverso il quale se ne fa uso è il seguente:
listato A.1: Simulazione con lsim
Pa
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% [< time >,<Temperature >] = S i m u l a te _ l s i m (<Cauer n e t p a ra m e te rs >,
%
<time v e c t o r >) ,
%
<i n p u t s matrix >) ,
%
<te m p e ra t u r e i n i t i a l v a l u e s >) ;
%
% S i m u l a t e s th e Cauer RC th erm a l model b e h a v i o u r
% g i v e n power d i s s i p a t i o n and ambient te m p e ra tu r e
%
% Version : 1.0
% 2005 Matteo G a t t a n i n i
%
% Example
% [ t T ] = S i m u l a te_ l s i m ( Rth , Cth , U, t , T0 ) ;
%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
f u n c t i o n [ t , T ]= S i m u l a t e _ l s i m ( Rth , Cth , U , t , T0 )
18
19
% −−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
20
21
% d e f a u l t o u tp u t
157
R
Ulteriori informazioni A.2. Altri scripts MatLab
22
158
T =[];
23
24
% −−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
25
26
% c r e a t i n g LTI model from s t a t e s p a c e e q u a t i o n s . . .
27
28
29
[ A B C D ] = B u i l d S t a t e S p a c e M o d e l ( Rth , Cth ) ;
sys = ss ( A , B , C , D ) ;
30
31
% . . . and s i m u l a t i n g
it
32
33
34
disp ( ’ ’ )
d i s p ( ’ S o l v i n g model e q u a t i o n . . . ’ )
35
[ T , t ] = lsim ( sys , U , t , T0 ) ;
plot (t , T (: ,5) , ’b ’ )
rte
36
37
38
39
d i s p ( ’ . . . Done ’ )
40
% −−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
Questo tipo di sistemi, in cui coesistono dinamiche molto diverse tra loro,
devono essere risolti con algoritmi stiff, capaci di scegliere opportunamente il
passo di integrazione in modo da limitare il carico computazionale necessario
a coprire l’intero intervallo di integrazione.
Un problema non da poco è causato dall’array della potenza dissipata
in ingresso, poiché i suoi veloci picchi di potenza in corrispondenza delle
commutazioni, visibili in figura 5.5, richiederebbero un passo di integrazione
costante e molto fitto, che renderebbe assai gravosa, se non impossibile con
i mezzi odierni, la simulazione.
Per ovviare a questo problema che avrebbe nel migliore dei casi allungato
i tempi di simulazione, considerando le osservazioni sottosezione 8.4.1, poiché
nelle simulazioni si era solo interessati alla temperatura del case, l’array delle
perdite è stato opportunamente filtrato considerando solo il valor medio dei
picchi di potenza, sicuri che comunque il loro effetto sarebbe stato comunque
pesantemente attenuato dalla dinamica lenta del nodo in questione.
Pa
41
A.2
A.2.1
R
Altri scripts MatLab
Fitting delle curve
L’estrazione della funzione composta da somme di esponenziali dalla misura della risposta al gradino può essere svolto facilmente grazie alle primitive
R
offerte da MatLab
, in particolare la funzione fit.
L’operazione di fitting, che costituisce il cuore della identificazione del
modello, è implementata con la seguente funzione:
R
Ulteriori informazioni A.2. Altri scripts MatLab
1
2
3
4
5
6
7
8
9
10
11
12
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% [ f i t r e s , g o o d n es s ] = ExpFit (<time >,<data >,<type >,<o rd e r >) ;
%
%
<type> i s 0 i f i s a c o o l i n g c u r v e
%
% F i t s a data s e t u s i n g ’ o rd er ’ e x p o n e n t i a l s
%
% Version : 1.0
% 2005 Matteo G a t t a n i n i
%
% Example
% [ f i t r e s , g o o d n es s ] = ExpFit ( t , T, 1 , 3 ) ;
%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
f u n c t i o n [ fitres , goodness ]= ExpFit ( X , Y , IsRising , order )
rte
13
listato A.2: Adattamento con esponenziali
159
14
15
16
17
% −−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
18
19
% settings
20
21
% −−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
22
23
% controls
24
25
26
27
28
i f ( nargin < 4 )
d i s p ( ’ Usage : [ f i t r e s , g o o d n e s s ]= ExpFit (X, Y,0 −1 , o r d e r ) ’ )
return
end
29
30
% −−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
31
32
% preparing f i t t i n g
33
34
35
disp ( ’ ’ )
d i s p ( [ ’ P erf o rm i n g f i t t i n g with ’ num2str ( order ) ’ e x p o n e n t i a l s . . . ’ ] )
36
37
ok_ = ~( i s n a n ( X ) | i s n a n ( Y ) ) ;
38
i f ( order == 2 ) % two e x p o n e n t i a l s
fo_ = fitoptions ( ’ method ’ , ’ N o n l i n e a r L e a s t S q u a r e s ’ , . . .
’ Lower ’ , [ 0 0 0 0 ] ) ;
%’ Algorithm ’ , ’ Levenberg −Marquardt ’ , . . .
st_ = [ 0 . 1 0 . 1 10 1 0 0 ] ;
e l s e i f ( order == 3 ) % t h r e e e x p o n e n t i a l s
fo_ = fitoptions ( ’ method ’ , ’ N o n l i n e a r L e a s t S q u a r e s ’ , . . .
’ Lower ’ , [ 0 0 0 0 0 0 ] ) ;
st_ = [ 0 . 1 0 . 1 0 . 1 1 10 1 0 0 ] ;
else
d i s p ( ’ Wrong o r d e r ! ’ )
return
end
Pa
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
s e t ( fo_ , ’ S t a r t p o i n t ’ , st_ ) ;
54
55
56
57
58
59
60
i f ( IsRising )
i f ( order == 2 ) % two e x p o n e n t i a l s
ft_ = fittype ( ’ r1 ∗(1− exp(−x/ t1 ) )+r2 ∗(1− exp(−x/ t2 ) ) ’ , . . .
’ dependent ’ , { ’ y ’ } , ’ i n d e p e n d e n t ’ , { ’ x ’ } , . . .
’ c o e f f i c i e n t s ’ , { ’ r1 ’ , ’ r2 ’ , ’ t1 ’ , ’ t2 ’ } ) ;
e l s e i f ( order == 3 ) % t h r e e e x p o n e n t i a l s
R
Ulteriori informazioni A.2. Altri scripts MatLab
ft_ =
fittype ( ’ r1 ∗(1− exp(−x/ t1 ) )+r2 ∗(1− exp(−x/ t2 ) )+r3 ∗(1− exp(−x/ t3 ) ) ’
,...
’ dependent ’ , { ’ y ’ } , ’ i n d e p e n d e n t ’ , { ’ x ’ } , . . .
’ c o e f f i c i e n t s ’ , { ’ r1 ’ , ’ r2 ’ , ’ r3 ’ , ’ t1 ’ , ’ t2 ’ , ’ t3 ’ } ) ;
61
62
63
else
64
d i s p ( ’ Wrong o r d e r ! ’ )
return
65
66
67
68
69
70
71
72
end
e l s e % Data a r e d e c l i n i n g
i f ( order == 2 ) % two e x p o n e n t i a l s
ft_ = fittype ( ’ r1 ∗ exp(−x/ t1 )+r2 ∗ exp(−x / t2 ) ’ , . . .
’ dependent ’ , { ’ y ’ } , ’ i n d e p e n d e n t ’ , { ’ x ’ } , . . .
’ c o e f f i c i e n t s ’ , { ’ r1 ’ , ’ r2 ’ , ’ t1 ’ , ’ t2 ’ } ) ;
e l s e i f ( order == 3 ) % t h r e e e x p o n e n t i a l s
ft_ = fittype ( ’ r1 ∗ exp(−x/ t1 )+r2 ∗ exp(−x / t2 )+r3 ∗ exp(−x/ t3 ) ’ , . . .
’ dependent ’ , { ’ y ’ } , ’ i n d e p e n d e n t ’ , { ’ x ’ } , . . .
’ c o e f f i c i e n t s ’ , { ’ r1 ’ , ’ r2 ’ , ’ r3 ’ , ’ t1 ’ , ’ t2 ’ , ’ t3 ’ } ) ;
else
d i s p ( ’ Wrong o r d e r ! ’ )
return
end
end
rte
73
160
74
75
76
77
78
79
80
81
82
83
% −−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
84
85
86
% f i t operation
[ fitres , goodness ] = fit ( X ( ok_ ) , Y ( ok_ ) , ft_ , fo_ )
87
88
% −−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
A.2.2
Caratteristiche del dispositivo
Pa
Per poter usare i dati elettrici forniti dal datasheet del modulo nelle simulazioni è comodo estrarre le funzioni interpolanti i dati e implementarle
R
con script MatLab
come il seguente.
1
2
3
4
5
6
7
8
listato A.3: Caratteristica di uscita
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% v = Vcef ( I c )
%
% BSM75GB120DLC OutPut C h a r a c t e r i s t i c
Vg=17V , Tj=125◦ C
%
%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
f u n c t i o n v=Vcef ( Ic )
9
10
% −−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
11
12
% main c a l c u l a t i o n
13
14
% I c = 1 0 . 8 9 ∗ Vce ^ 2 . 2 2 8
15
16
v = ( Ic / 1 0 . 8 9 ) . ^ ( 1 / 2 . 1 5 ) ;
17
18
% −−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
Ulteriori informazioni A.3. Altre misure
A.3
161
Altre misure
Durante la fase di validazione sono state effettuate diverse misurazioni
per vari segnali di comando applicati all’IGBT. In figura A.1 si può ammirare una lunga sessione di misure di temperatura corrispondenti alle cinque
termocoppie la cui posizione è descritta in figura 7.5; una parte di questa
sessione è stata usata per la validazione esibita nella sottosezione 8.4.3.
90
rte
100%
80
50s 70%
temperature [°C]
70
40s 40%
60
50
Tc
Ths1
Ths2
Ths3
Tamb
40s 10%
40
30
20
0
2000
4000
6000
8000
10000
time [s]
12000
14000
16000
Figura A.1: Misure ad ingresso pulsante
Pa
È da notare che la configurazione di misura adottata, caratterizzata da
un carico prevalentemente resistivo, una bassa tensione di alimentazione e
piccolissime frequenze di commutazione, rende la potenza persa in conduzione
nell’IGBT praticamente l’unica dissipazione di rilievo nel sistema; essa è pari
a 48 W .
Altre sessioni di misura, non menzionate nel corpo del documento per
questioni di spazio, sono state effettuate aumentando considerevolmente l’induttanza del carico in modo da avere una maggiore potenza persa (altrimenti trascurabile) nel diodo; in figura A.2 nella pagina seguente è possibile osservare le grandezze elettriche acquisite con l’oscilloscopio per questa
configurazione.
Un lodevole tentativo di effettuare misure in alta tensione (alta si fa
per dire, poiché si tratta di circa 350 V ), per verificare le perdite calcolate,
si è rivelato ben poco utile dal punto di vista termico a causa delle basse
Ulteriori informazioni A.3. Altre misure
162
Vce
Ic
Pe
Id
Ir
Vpn
V [1 V] ; I [1 A] ; Pe [1 W]
60
40
20
0
rte
−20
0
0.01
0.02
time [s]
0.03
0.04
0.05
Figura A.2: Grandezze elettriche con carico induttivo
correnti e frequenze di commutazione in gioco; come si può osservare nelle
misure di temperatura in figura A.3 il dispositivo risulta ben poco stressato
termicamente.
45
100%
0%
50ms 50%
0%
100ms 50%
Tc
35
Ths1
Ths2
30
Ths3
Tamb
Pa
temperature [°C]
40
25
0
1000
2000
3000
4000
time [s]
5000
6000
7000
Figura A.3: Misure di temperatura in alta tensione
8000
Appendice B
rte
Applicazioni sviluppate
Questo capitolo è dedicato ad una veloce descrizione del software
stand-alone creato in supporto alle misure.
A dispetto della parte marginale che dedico ad esse in questo documento,
buona parte del tempo dedicato a questo lavoro è stato speso nello sviluppo
R
di due applicazioni Windows
, entrambe scritte in C++ con l’ambiente di
TM
++
sviluppo Borland C
Builder 5.
B.1
Un segnale di comando
Pa
La prima applicazione nasce dalla necessità di creare in modo flessibile e
facilmente controllabile un segnale di comando per l’IGBT, che si traduce nel
generare un’onda quadra di tensione avente un certo periodo e duty-cycle,
selezionabili nel range più vasto possibile.
Per creare il segnale si possono sfruttare i pin di controllo di flusso della
porta seriale, direttamente comandabili grazie ad una funzione delle AppliR
cation Programming Interface (API) di Windows
.
Si comprende bene che la difficoltà e la sfida in questo genere di necessità
è il riprodurre nell’elaboratore una misura temporale più precisa possibile:
R
è ovvio che un sistema operativo grafico come quello di Windows
non è
l’ambiente ideale per eseguire processi aventi stringenti esigenze temporali,
ed è ovvio che la scelta di questo sistema operativo motivata esclusivamente
da questioni di comodità, confidando nelle prestazioni dei moderni processori.
R
Tipicamente il programmatore Windows
a cui serve una temporizzazione utilizza le funzioni offerte dalle API del sistema operativo, usandole in
modo diretto o tramite dei wrappers offerti dall’ambiente di programmazione.
163
Applicazioni sviluppate B.1. Un segnale di comando
164
Pa
rte
R
Windows
offre dei timers che allo scadere di un certo intervallo temporale generano degli interrupt, e quindi la possibilità di eseguire una funzione.
R
La granularità minima dichiarata del timer di Windows
è di 1 ms , ma
in realtà ho avuto modo di constatare sul mio elaboratore che una corretta
temporizzazione è garantita solo per intervalli maggiori di 15 ms , subordinatamente all’attuale carico di lavoro del processore. Una simile granularità
temporale limita notevolmente la frequenza del segnale ottenibile.
Esiste sulle piattaforme pc ormai da diversi anni un contatore a 64 bit
che funziona in modo indipendente dal resto del sistema, il cui valore si
incrementa in modo regolare con una frequenza considerevole1 .
Questo contatore è tipicamente usato per misurare le prestazioni del sistema, ed infatti viene chiamato performance counter; la scoperta della sua esistenza mi ha aperto la possibilità di migliorare il range di frequenze ottenibili
tramite il pc.
L’unica funzione offerta da questo contatore è la lettura del suo valore, un
intero senza segno a 64 bit . L’unico modo per sfruttare questa informazione
temporale è creare un thread che legga continuamente il contatore e controlli
se il il tempo impostato è scaduto o meno.
In questo modo si riesce ad ottenere temporizzazioni il cui limite inferiore
si può avvicinare molto alla granularità del performance counter, impostando
in modo opportuno la priorità del thread; notevoli risultati si possono ottenere
con processori che supportano la tecnologia hyper-threading; in ogni caso
R
.
questa tecnica ha prestazioni migliori del timer di Windows
Un grave svantaggio di questa struttura polling, che potrebbe essere parzialmente attenuato, è il considerevole impegno delle risorse di sistema, costantemente occupate nel confrontare il valore del contatore con il tempo di
attivazione dell’evento.
Ecco la struttura semplificata del thread:
listato B.1: Il thread di temporizzazione
// − − − − − − − − − − − − − − − − − − − − − − − − − − − − − − −
void __fastcall T T h r e a d C o u n t e r : : C o u n t W i t h _ P e r f o r m a n c e C o u n t e r ( )
{ // Counting t h r e a d k e r n e l , main s t r u c t u r e
LARGE_INTEGER x ;
Q u e r y P e r f o r m a n c e C o u n t e r (&x ) ;
__int64 c = x . QuadPart ;
f o r ( ; ; ) { // For e v e r do :
// S e t s e l e c t e d pi n t o on
Sugli elaboratori odierni la frequenza è di 3579545 counts/s , corrispondente ad una
granularità temporale di circa 0.28 µs .
1
Applicazioni sviluppate B.1. Un segnale di comando
165
E s c a p e C o m m F u n c t i o n ( hComm , Set_Pin ) ;
// Counter v a l u e s o f e v e n t s
Tton = c + Signal . ton ;
TT = c + Signal . T ;
// Wait f o r t u r n o f f
while ( c < Tton ) {
Q u e r y P e r f o r m a n c e C o u n t e r (&x ) ;
c = x . QuadPart ;
}
rte
// S e t s e l e c t e d pi n t o o f f
E s c a p e C o m m F u n c t i o n ( hComm , Clr_Pin ) ;
// Check f o r t h r e a d t e r m i n a t i o n
i f ( Terminated ) {
Signal . cEnd = c ;
return ;
}
// Wait f o r c y c l e end
while ( c < TT ) {
Q u e r y P e r f o r m a n c e C o u n t e r (&x ) ;
c = x . QuadPart ;
}
}
}
Pa
In questo listato si possono individuare le chiamate alle API che permettono di pilotare il pin seriale selezionato e di leggere il valore del contatore.
L’applicazione è stata dotata di una comoda interfaccia grafica che consente di scegliere le caratteristiche del segnale (figura B.1) e di modificare le
impostazioni della porta seriale (figura B.2).
Figura B.1: xCtrlSet - selezione delle caratteristiche del segnale
166
rte
Applicazioni sviluppate B.2. Comunicare con il data logger
Figura B.2: xCtrlSet - selezione del pin della porta
B.2
Comunicare con il data logger
Pa
Molto più complessa ed elaborata è l’applicazione sviluppata per gestire
il data logger usato per acquisire i segnali delle termocoppie, il nudam 6108
della Adlink.
Il grande orgoglio di questo programma è che non dipende da librerie di
terze parti sia per quanto riguarda la comunicazione seriale che per la parte
grafica di visualizzazione delle acquisizioni.
La comunicazione seriale è interamente gestita a basso livello attraverso
le API, secondo le preziose indicazioni di un articolo di Allen Denver 1; in particolare è stata implementata sia una comunicazione sincrona che asincrona
(overlapped), anche se con questa c’è ancora qualche problema di timeout.
La classe che implementa il grafico delle acquisizioni è derivata esclusivamente da un componente visuale fornito con l’ambiente di programmazione,
le cui primitive comprendono il tracciamento di linee, la colorazione dei pixels
e la scrittura di testi. Particolarmente pregevole è la funzionalità di gestione automatica della griglia e della scala degli assi a seconda dei valori di
temperatura misurati.
In figura B.3 è riportata una schermata del programma, relativa al tab
contenente il grafico delle acquisizioni.
Questa applicazione si presta bene ad essere strutturata mediante classi,
consentendo una organizzazione del codice particolarmente comoda: ll modulo di acquisizione è gestito mediante un oggetto istanziato da una classe
1
Microsoft Windows Developer Support.
167
rte
Applicazioni sviluppate B.2. Comunicare con il data logger
Figura B.3: Uno screenshot del “nudam manager”
Pa
che ingloba tutte le informazioni che lo riguardano e che fornisce dei metodi
che permettono l’interazione con gli altri oggetti dell’applicazione.
Il modulo comunica con il computer tramite la porta seriale, scambiando messaggi composti da caratteri ASCII in modo passivo secondo lo schema
domanda-risposta; il fulcro della classe rappresentante il dispositivo è quindi la parte di creazione dei comandi e di “digestione” delle risposte, che in
sostanza si tratta di un rudimentale parser di stringhe.
La struttura a oggetti consente di svincolare facilmente l’applicazione dallo specifico dispositivo usato grazie all’ereditarietà e al polimorfismo: se nel
codice si interagisce con l’oggetto rappresentante il modulo mediante una
interfaccia comune, usando cioè una classe generica che implementi l’interfaccia del generico data logger, esso è svincolato dai dettagli implementativi
che si occupano della gestione dello specifico dispositivo, contenuti in classi
derivate dalla classe comune.
Ecco l’interfaccia usata nell’applicazione per gestire il dispositivo di acquisizione:
Applicazioni sviluppate B.2. Comunicare con il data logger
listato B.2: Interfaccia della classe che gestisce il data logger
168
//======================== C l a s s D e f i n i t i o n =============================
c l a s s GenericMng { // Generic d e v i c e manager
public :
GenericMn g ( TSerialPo r t ∗ , TMemo ∗ =0) ;
~GenericMng ( ) ;
rte
// . . . O pe r at i on s
bool Connect ( String ) ; // Port c o n n e c t i o n management
bool Disconnect ( ) ;
bool R e t r i e v e S t a t u s ( ) ; // F i l l s a l l s e t t i n g par am e t e r s
bool Scan ( ) ; // Returns t r u e i f a d e v i c e i s found
// . . . C a l i b r a t i o n
void __fastcall A D C a l i b r a t i o n ( ) ; // AD c o n v e r t e r c a l i b r a t i o n
void __fastcall C J C C a l i b r a t i o n ( double ) ; // C or r e c t CJC o f f s e t e r r o r s
// . . . S e t t i n g s
bool S e t C o n f i g u r a t i o n ( String , String , String , unsigned char ) ;
bool R e a d C o n f i g u r a t i o n ( ) ; // Read t h e c o n f i g u r a t i o n
bool R e a d M o d u l e N a m e ( ) ; // Read module name
bool R e a d F i r m w a r e V e r s i o n ( ) ; // Read Firmware V e r s i on
bool S o f t w a r e R e s e t ( ) ; // Module S o f t w a r e R e s e t
// . . . A c q u i r i n g
String ReadData ( unsigned char ) ; // Read Analog Data From a Channel
bool ReadAllDa t a ( ) ; // Read a l l c h a n n e l s
bool C h o o s e C h a n n e l s ( unsigned char ) ; // Enable / D i s a b l e c h a n n e l s
bool R e a d C h a n n e l S t a t u s ( ) ; // Read t h e s t a t u s o f c h a n n e l s
} ; //=====================================================================
//======================== C l a s s D e f i n i t i o n =============================
c l a s s NudamMng : public GenericMng { // NuDAM d e v i c e manager
Pa
public :
TNudamMng ( TSerialPor t ∗ , TMemo ∗ =0) ;
// Uses common g e n e r i c i n t e r f a c e
protected :
// . . . S p e c i f i c commands ( don ’ t u s e f o r p o r t a b i l i t y )
bool R e a d L e a d i n g C o d e S e t t i n g ( ) ; // . . . and h o s t watchdog s t a t u s
bool C h a n g e L e a d i n g C o d e S e t t i n g ( String ) ;
bool S e t H o s t W a t c h d o g S a f e t y ( bool , String , String ) ; // S e t h o s t watchdog
bool R e a d H o s t W a t c h d o g S a f e t y ( ) ; // // Read h o s t watchdog t i m e r
bool HostOk ( ) ; // S i g n a l h o s t Ok f o r watchdog
} ; //=====================================================================
Come si vede la classe NudamMng, che contiene i dettagli che riguardano
il nudam, è derivata da una classe generica, che funge da layer verso chi nel
programma usufruisce dei servizi offerti dal data logger.
La temporizzazione delle acquisizioni è gestita da un apposito thread, che
Applicazioni sviluppate B.2. Comunicare con il data logger
Pa
rte
ha il compito di controllare il tempo trascorso e di interrogare il modulo
secondo intervalli prestabiliti, memorizzando i dati acquisiti in un file.
Il poter sviluppare autonomamente l’applicazione di acquisizione dei dati
permette una notevole flessibilità e libertà; ad esempio non è difficile programmare le acquisizioni secondo scale temporali non regolari, come ad esempio
scale logaritmiche.
Poiché le acquisizioni di temperatura tramite termocoppie non richiedono
temporizzazioni spinte, nulla vieterebbe di implementare delle elaborazioni
online dei dati; in particolare potrebbe essere utile un criterio di controllo del
termine del transitorio, comunicando al generatore di segnale di modificare
opportunamente il comando all’IGBT.
169
Appendice C
rte
Convezione
La validità di un risultato si misura anche nella consapevolezza di
ciò che si è trascurato per conseguirlo. Qualche nota sui fenomeni
convettivi, solo per renderci conto di quanto siano complicati; queste
informazioni sono essenzialmente tratte da [Tri77].
C.1
Le equazioni in gioco
Pa
Le equazioni che concorrono nella descrizione dei fenomeni convettivi derivano essenzialmente dalla legge di conservazione dell’energia: considerando
un volume di fluido le variazioni di massa ed energia devono essere bilanciate
dagli scambi con il mondo esterno.
Esprimiamo ora queste leggi con il linguaggio matematico, nell’ambito
della fisica classica e in forma locale1 . Definito il campo scalare della densità
di materia ρ e il campo vettoriale di velocità u , la conservazione della massa
in ogni punto nella regione occupata dal fluido si esprime così:
∂ρ
+ ∇ · (ρu) = 0
∂t
(C.1)
Questa equazione è anche chiamata equazione di continuità perché formalizza
l’assenza di pozzi o sorgenti di materia: pensando di integrarla in un volume
si vede come il flusso2 di materia entrante bilanci l’aumento di densità.
Considerando cioè un volumetto di fluido piccolo a piacere, tale da confondersi con un
punto, in modo tale che in esso le grandezze di interesse sono costanti.
2
L’integrale di volume della divergenza è pari al flusso attraverso la superficie di
contorno, secondo le usuali convenzioni matematiche positivo se uscente.
1
170
Convezione C.1. Le equazioni in gioco
171
rte
La seconda equazione che si può scrivere rappresenta l’aspetto meccanico
della conservazione dell’energia: l’equazione fondamentale della dinamica, che
esprime la conservazione della quantità di moto. Definito il campo scalare di
pressione p , di viscosità µ e un campo vettoriale di forze esterne distribuite
f , si scrive:
du
= −∇p + µ∇2 u + f
(C.2)
ρ
dt
Si può distinguere il termine inerziale al primo membro bilanciato da un
termine di pressione, un termine viscoso, e dalla forza esterna.
La terza equazione completa il principio di conservazione dell’energia
esprimendo il bilancio termico del sistema: l’aumento di energia termica interna è dato unicamente dalla somma del calore entrante ed un eventuale
calore distribuito nel volume, generato da interazioni col mondo esterno. Da
notare che il primo termine, ossia il calore che passa attraverso la frontiera
del volumetto infinitesimo, è scambiato per conduzione.
Introdotti i campi scalari di temperatura T , di calore specifico c , di
conduttività termica k e di generazione di calore j :
ρc
dT
= k∇2 T + j
dt
Pa
In definitiva il sistema è descritto dalle equazioni:
∂ρ
+ ∇ · (ρu) = 0
equazione di continuità
∂t
du
ρ
= −∇p + µ∇2 u + f equazione dinamica
dt
ρc dT = k∇2 T + j
bilancio termico
dt
(C.3)
(C.4)
Questa descrizione deve ovviamente essere completata dalle relazioni costitutive che caratterizzano i parametri del fluido (coefficiente di espansione
termica, conduttività, viscosità e calore specifico); ci si può rendere conto di
quanto sia complesso il fenomeno da studiare considerando che questi termini dipendono dai campi di pressione, velocità e temperatura, ossia dalle
incognite stesse del problema.
Al fine di ottenere un modello trattabile si introducono delle ipotesi semplificative; con Boussinesq supponiamo che le variazioni dei campi di temperatura e pressione nella regione di interesse siano così piccole da non provocare in essa variazioni sensibili delle caratteristiche fisiche del fluido; in virtù
Convezione C.1. Le equazioni in gioco
Pa
rte
di questa ipotesi si considerano quindi α (espansione termica3 ), β (compressibilità isoterma4 ), µ (viscosità), k (conduttività termica), c (calore
specifico) costanti; per quanto riguarda la densità ρ linearizziamo la sua variazione rispetto la temperatura ρ = ρ0 + ∆ρ introducendo quando possibile
l’ipotesi di incomprimibilità ∆ρ ≪ ρ0 .
Queste ipotesi vengono sovente formalizzate nel seguente modo:
L’espansione dovuta alla temperatu
A = αΘ ≪ 1
ra deve essere piccola
La lunghezza caratteristica di varia
L
zione della pressione isoterma deve
≪1
B=
essere grande rispetto le dimensioni
1
del sistema
gρβ
La lunghezza caratteristica di varia
zione della temperatura adiabatica
deve essere grande rispetto le dimen
L
sioni del sistema. Questa quantità è
C= ≪1
(C.5)
dello stesso ordine di grandezza del
c
rapporto QL1 , tra il lavoro che man
gα
tiene l’energia cinetica del moto del
fluido ed il calore entrante.
In aggiunta alle precedenti e non
strettamente necessaria; essa è
gαT0
strettamente legata a C e rappre
c
senta
il rapporto tra il gradiente
≪1
D=
Θ
di temperatura adiabatico e quello
L
imposto; T0 è la temperatura di
172
riferimento.
L’approssimazione sul termine A può dare problemi se si ha a che fare
con gas oppure con alcuni liquidi come l’acqua, per la quale α ha davvero
3
Il coefficiente di espansione termica del fluido α è dato da:
1 ∂ρ
α=−
ρ ∂T p
4
Il coefficiente di compressibilità isoterma del fluido β è dato da:
1 ∂ρ
β=
ρ ∂p T
Convezione C.1. Le equazioni in gioco
173
rte
uno strano andamento con la temperatura. I termini B e C hanno lo stesso
ordine di grandezza e per sistemi di piccola scala sono in genere molto piccoli;
solo per sistemi estesi (ad esempio nei modelli meteorologici) è necessario
tenere conto degli effetti non previsti da queste approssimazioni (detti quindi
effetti non-Boussinesq). Per quanto riguarda D , usualmente è D ≫ C ; se
D ≪ 1 non è verificata è necessario considerare una scala di temperatura
che tenga conto del profilo di temperatura adiabatico5 : θ = T − (Ta − T0 ) .
Applichiamo ora le approssimazioni di Boussinesq alle (C.4); le forze di
volume siano dovute al campo gravitazionale g .
Nella equazione di continuità introduciamo l’ipotesi di incomprimibilità ponendo ρ ≃ ρ0 , mentre nella equazione dinamica conglobiamo nella
pressione il termine idrostatico ponendo: P = p + ρ0 Φ con g = −∇Φ
Infine è da osservare che per le ipotesi fatte è:
α=−
1 ∂ρ 1 ρ − ρ0
∆ρ
≈−
⇔
= −α∆T
p
ρ ∂T
ρ0 T − T0
ρ0
(C.6)
Pa
Quindi è possibile esplicitare in modo semplice l’effetto legato alla temperatura nell’equazione di moto.
k
Introducendo la viscosità cinematica ν = µρ e la diffusività termica κ = ρc
riscriviamo le (C.4) dopo aver applicato ad esse le approssimazioni di Boussinesq:
∇·u=0
1
∂u
+ (u · ∇)u = − ∇P + ν∇2 u − gα∆T
(C.7)
∂t
ρ0
∂T + u · ∇T = κ∇2 T + j
∂t
ρ0 c
Nell’equazione di moto è possibile distinguere al primo membro il termine inerziale, bilanciato dal gradiente di pressione, dal termine viscoso6 e
da un termine di galleggiamento (Bouyancy) che rappresenta l’elemento di
accoppiamento principale con l’equazione termica, nonché l’origine del moto
convettivo naturale.
Nell’equazione termica si riconosce a primo membro il termine di avvezione, che rappresenta l’accoppiamento con l’equazione di moto, e il termine di
conduzione a secondo membro. Per quanto riguarda il termine di produzione
Il profilo di temperatura adiabatico è quella distribuzione di temperatura tale per
cui un volumetto di fluido, spostandosi nella regione di interesse, non scambia calore pur
subendo compressioni ed espansioni.
6
Purtroppo spesso è necessario tenere in conto che la viscosità cinematica ν dipende
dalla temperatura.
5
Convezione C.2. Forma adimensionale
rte
di calore, affinché esso non sia un termine di accoppiamento, non deve dipendere dalle incognite, quindi non deve essere originato da dissipazioni viscose
o espansioni adiabatiche.
Introducendo opportune approssimazioni abbiamo ottenuto un modello
che descrive i sistemi convettivi; questo modello, se propriamente investigato, può fornire utili indizi su fenomeni di grande interesse come la transizione
da moto laminare a turbolento, l’onset di instabilità idrodinamiche, la formazione di patterns regolari e il manifestarsi fenomeni di auto-organizzazione.
Riscriviamo le (C.7) per le soluzioni stazionarie dei sistemi in studio,
dove è possibile trascurare il termine di pressione e non esiste il termine di
produzione di calore:
∇·u=0
(u · ∇)u = ν∇2 u − gα∆T
(C.8)
u · ∇T = κ∇2 T
174
Pa
Le (C.8) sono infine le equazioni che danno le soluzioni stazionarie del
sistema una volta associate le condizioni al contorno; queste sono equazioni a derivate parziali accoppiate e non lineari, la cui soluzione, degenere e
non unica, è fornita da osservazioni sperimentali oppure ottenuta attraverso
onerose integrazioni numeriche.
Quando si ha a che fare con modelli così complessi (seppur non privi
di pesanti approssimazioni) è naturale cercare dei criteri di similitudine tra
sistemi, in modo da poter estendere le soluzioni a sistemi tra loro simili.
C.2
Forma adimensionale
Supponiamo abbia senso introdurre delle quantità caratteristiche che sintetizzino le proprietà del sistema, come una lunghezza caratteristica L ,
un salto di temperatura caratteristico Θ , una velocità caratteristica1 U .
Sebbene da un punto di vista matematico queste quantità siano arbitrarie,
esse devono essere scelte in modo oculato affinché abbia senso il confronto
tra sistemi geometricamente simili, e le grandezze riscalate siano dell’ordine
di grandezza dell’unità.
È bene notare che al contrario delle altre due quantità la velocità caratteristica non è
in genere un valore impresso dall’esterno e quindi definibile a priori.
1
Convezione C.2. Forma adimensionale
175
Introducendo nelle (C.8) le grandezze riscalate con le quantità caratteristiche:
u
t
p
T
∇′ = L∇ , T ′ =
, u′ =
, t′ = L , p′ =
Θ
U
ρ0 U 2
U
rte
Otteniamo il modello nella forma adimensionale, dove abbiamo esplicitato il
versore del campo gravitazionale g = gig .
ν
gαΘL ′
′
′
′
′2 ′
(u · ∇ )u = + UL ∇ u − U 2 T ig
(C.9)
κ
u′ · ∇′ T ′ =
∇′ 2 T ′
UL
Ecco che riferendoci a grandezze riscalate abbiamo evidenziato tre coefficienti adimensionali nei quali sono condensate le proprietà del sistema, e che
individuano una famiglia di sistemi tra loro simili.
L’approssimazione di Boussinesq sembra introdurre un comodo criterio
di similarità, corrispondente all’uguaglianza di questi tre parametri, ma ci
si rende facilmente conto che è ben poco utile se non è possibile stimare
U , quantità che dipende dalla soluzione del problema stesso. Riscriviamo
ora in modo più comodo questi parametri, in modo che la scomoda velocità
caratteristica sia confinata in un ben preciso termine.
Nel coefficiente del termine viscoso riconosciamo il numero di Reynolds,
Numero
quantità che rende conto del peso del termine inerziale rispetto quello viscoso:
di Rey-
Pa
(u · ∇)u
UL
< inerziale >
nolds
=
∼
Re =
2
< viscoso >
ν∇ u
ν
Quando Re è piccolo è il termine viscoso a dominare il moto, mentre
quando Re è grande l’effetto del termine viscoso è confinato nelle zone dove
devono essere rispettate le condizioni al contorno introdotte da esso (è il
termine col grado maggiore); queste zone sono dette Boundary Layers del
moto.
Nel coefficiente del termine di conduzione si riconosce l’analogo termico
Numero
del numero di Reynolds, il numero di Péclet; esso rappresenta il peso del
di
termine di avvezione rispetto quello di conduzione:
< avvezione >
u · ∇T
UL
Pe =
=
∼
< conduzione >
κ∇2 T
κ
Quando Re aumenta il Boundary Layer viscoso si fa sempre più sottile e sopraggiunge
la possibilità di transizioni turbolente. Lo spessore del Boundary Layer è legato a Re dalla
relazione:
U
U
δ
1
U ∼ ν 2 ⇔ ∼ Re− 2
L
δ
L
1
Péclet
Convezione C.2. Forma adimensionale
176
L’ analogia formale con l’equazione di moto porta a fare considerazioni
simili alle precedenti: quando P e è piccolo il calore sarà trasmesso nel fluido prevalentemente per conduzione, mentre quando P e è grande prevarrà
il termine di avvezione; vicino al contorno a diversa temperatura vi sarà comunque una zona in cui il calore è scambiato per sola conduzione, chiamata
Boundary Layer termico2 .
Poiché è comodo fare riferimento ad un parametro che dipende solo dalle
Numero
proprietà del fluido si introduce il numero di Prandtl definito come:
ν
κ
rte
Pr =
di
Prandtl
Pa
Per cui sovente si esprime il numero di Péclet come P e = ReP r . Il numero
di Prandtl evidenzia come l’estensione delle soluzioni da un sistema all’altro
sia limitato dalla diversa natura dei fluidi coinvolti. La maggior parte dei
liquidi hanno P r maggiore dell’unità (ad esempio H2 O a temperatura ambiente ha P r ≃ 6 ); poiché ν ha un range di variazione molto più ampio
di κ , di solito liquidi ad alti numeri di Prandtl sono anche molto viscosi (fanno eccezione i metalli liquidi, caratterizzati da conducibilità termiche
molto alte). Spesso i gas hanno numeri di Prandtl poco inferiori all’unità (ad
esempio l’aria ha P r ≃ 0.7 ).
Particolare importanza ha infine il coefficiente del termine di Bouyancy;
Numero
questa quantità è chiamata numero di Richardson e dà l’idea del peso della
di
forza di Bouyancy rispetto il termine inerziale3 .
Grashof
Poiché esso contiene la scomoda velocità caratteristica, cerchiamo di riconoscere e separare il numero di Reynolds, affinché questa appaia solo in
esso:
3
gαΘL
gαΘL ν 2 L2
Gr
gαΘL
ν2
=
=
2
2 =
2
2
2
U
U
ν L
Re
Re2
,
Gr =
gαΘL3
ν2
La quantità Gr non contiene la velocità caratteristica ed è detto numero
di Grashof ; esso è correlato al rapporto tra il termine di Bouyancy e il termine
2
Analogamente a Re , P e dà l’idea delle dimensioni del Boundary Layer termico:
U
3
Θ
Θ
δ
1
∼ κ 2 ⇔ ∼ P e− 2
L
δ
L
Il numero di Richardson è definito come:
gL2 ∂ρ ρU 2 ∂z Convezione C.3. Convezione naturale
rte
viscoso, e come vedremo ha un’importanza fondamentale nella convezione
naturale.
Ecco quindi le equazioni nelle variabili adimensionali riscritte in funzione
dei tre parametri introdotti:
Gr ′
′
′
′
′2 ′
(u · ∇ )u = Re ∇ u − Re2 T ig
(C.10)
′
1
2
′
u · ∇ T′ =
∇′ T ′
P rRe
177
Vedremo che quando è possibile stimare U questi parametri consentono una stima qualitativa del comportamento del sistema sulla base di
osservazioni sperimentali effettuate su sistemi simili.
Questa rappresentazione suggerisce una classificazione dei sistemi in studio a seconda del peso degli effetti di Bouyancy, che in questa approssimazione rappresentano il solo effetto della temperatura nell’equazione di moto; tutte le considerazioni seguenti sono ben poco utili allorquando non sia
possibile introdurre e valutare U .
C.3
Convezione naturale
Pa
Quando Gr ≪ Re2 la temperatura sparisce dall’equazione di moto che
risulta così disaccoppiata dall’equazione termica: è possibile introdurre una
scala di velocità U indipendente e un criterio di similarità dato dall’uguaglianza di Re e P r . In queste condizioni parliamo di convezione forzata.
Quando Gr ≫ Re2 il termine di Bouyancy è la causa predominante del
moto: in questo caso il sistema viene detto in convezione libera o naturale,
perché permane in quiete in assenza di gradienti di temperatura. Vedremo
come il numero di Grashof caratterizzi il comportamento del sistema1 .
In regime di convezione libera le equazioni dinamica e termica sono accoppiate tra loro: il campo di velocità dipende dal gradiente di temperatura
che a sua volta dipende dal campo di velocità. Non è più possibile introdurre
una scala di velocità indipendente, quindi Re e P e non hanno più il ruolo
di primo piano che avevano nella convezione forzata. Bisogna fare riferimento
alle quantità determinabili dai dati che individuano il problema: esse sono
Gr e P r .
Convezione forzata e libera sono casi estremi che racchiudono una varietà di situazioni:
Quando Gr ∼ Re2 le cose si complicano; è il caso ad esempio della convezione in flussi
stratificati o in fluidi rotanti.
1
Convezione C.3. Convezione naturale
178
rte
Consideriamo le equazioni adimensionali e facciamo debite considerazioni
sulle informazioni che contiene il numero di Grashof : dobbiamo cercare di
vedere se e quando è possibile introdurre un criterio di similarità e quindi un
modo per stimare la quantità incognita Re (e quindi la velocità caratteristica
U ) conoscendo Gr e P r .
Guardando l’equazione di moto abbiamo tre termini che si equilibrano:
il termine inerziale, viscoso e di Bouyancy, il quale non è mai trascurabile
per ipotesi: non possiamo fare molto, se non considerare i due casi estremi di
questo equilibrio:
Quando il termine viscoso è trascurabile la forza di Bouyancy è equilibrata
dal termine inerziale: questo avviene ad alti numeri di Grashof.
Re2 (u′ · ∇′ )u′ =
2
− GrT ′ ig
Re∇′ u′
L’ipotesi di ritenere trascurabile il termine viscoso è buona ad alti Gr ,
infatti perché vi sia equilibrio anche Re2 deve essere grande: possiamo quindi
trascurare Re rispetto le precedenti quantità.
Questo equilibrio suggerisce la seguente scala di velocità:
2
U
p
< inerzia >
|(u · ∇)u|
=
∼ L ∼ 1 → U ∼ gαLΘ
< buoyancy >
|gα∆T |
gαΘ
Pa
Con la quale si valuta il numero di Reynolds:
r
√
gαLΘL
gαΘL3 √
UL
∼
=
= Gr
Re =
ν
ν
ν2
Per quanto riguarda l’equazione termica:
u′ · ∇′ T ′ =
1
P rGr
2
1
2
∇′ T ′
Come si vede in regime di convezione libera ad alti numeri di Grashof il
1
valore Gr 2 consente di stimare Re , ossia il Boundary Layer di velocità, e
quindi consente di fare previsioni sul tipo di moto; analogamente la quantità
1
P rGr 2 consente di stimare P e , quindi il Boundary Layer termico.
Consideriamo ora il caso opposto: la forza di Bouyancy è equilibrata unicamente dal termine viscoso, ossia il termine inerziale è trascurabile. Questo
avviene a bassi numeri di Grashof.
Re2 (u′ · ∇′ )u′
2
= Re∇′ u′ − GrT ′ ig
Convezione C.3. Convezione naturale
179
Il termine inerziale è trascurabile quando Gr è basso: infatti affinché il
termine di Bouyancy conservi il suo ordine di grandezza, Re2 deve essere un
infinitesimo di ordine superiore rispetto Gr .
Questo equilibrio suggerisce la seguente scala di velocità:
ν LU2
|ν∇2 u|
gαΘL2
< viscoso >
=
∼
∼1 → U ∼
< buoyancy >
|gα∆T |
gαΘ
ν
Con la quale si valuta il numero di Reynolds:
gαΘL2
L
ν
gαΘL3
= Gr
ν2
rte
UL
Re =
∼
ν
ν
=
Per quanto riguarda l’equazione termica:
u′ · ∇′ T ′ =
1
2
∇′ T ′
P rGr
Pa
In regime di convezione libera a bassi numeri di Grashof il valore Gr
stesso consente di stimare Re , e quindi P rGr consente di stimare P e . La
quantità Ra = P rGr è detta numero di Rayleigh 2 . Questa quantità ha un
ruolo di primo piano nello studio del moto convettivo dei layers di fluido
orizzontali (celle di Rayleigh-Bénard ).
Abbiamo visto che nei sistemi caratterizzati da convezione libera ad alti
o bassi numeri di Grashof, la similarità dinamica e termica è assicurata dall’uguaglianza di Gr e P r ; in altre parole l’uguaglianza di questi parametri
assicurano la similarità tra due sistemi.
Poiché Gr e P r bastano ad identificare il sistema, ogni altro parametro
caratteristico sarà funzione di questi: ad esempio abbiamo visto le relazioni
Re = f(Gr,P r) e P e = f(Gr,P r) .
Il numero di Grashof ha un ruolo affine a quello di Reynolds nella convezione forzata perché indica il tipo di moto da attendersi: Per Gr grandi3 (e
P r non troppo piccoli) si ha che le forze d’inerzia ed i fenomeni di avvezione
dominano sulle forze viscose e i fenomeni conduttivi; gli effetti di questi ultimi saranno confinati in sottili zone dove devono essere verificate le condizioni
al contorno (i Boundary Layers). All’aumentare del numero di Grashof oltre
una certa soglia avremo transizioni turbolente.
È da puntualizzare che il tipo di moto influenza pesantemente la quantità di calore trasmessa dal fluido: in genere un moto turbolento garantisce
un maggior passaggio di calore rispetto ad un moto laminare. Una quantità
È molto frequente avere Gr grande: ad esempio, per Θ = 1◦ C e L = 1cm abbiamo
Gr ≈ 102 in aria e Gr ≈ 103 in acqua.
3
Numero
di Rayleigh
Numero
di
Nüsselt
Convezione C.4. Piastra verticale
180
che rende conto del calore che viene trasmesso è il numero di Nüsselt, definito come il rapporto tra il calore totale trasmesso e il calore trasmesso per
conduzione.
< Qtrasmesso >
Nu =
< Qconduzione >
C.4
Piastra verticale
Pa
rte
Vediamo ora l’esempio più semplice di un sistema in convezione libera, una
lastra indefinita verticale1 piana avente uniforme Tp immersa in un fluido
fermo ed a temperatura T0 < Tp . Questo sistema può essere un modello di
prima approssimazione di un dissipatore metallico in aria.
Vicino alla parete il fluido scaldato per conduzione è trascinato verso l’alto
dalle forze di Bouyancy, quindi a partire dal bordo inferiore della piastra
si instaura un moto ascendente inizialmente laminare, su cui focalizziamo
la nostra attenzione. Più in alto, quando il numero di Grashof supera un
valore critico, si ha una transizione turbolenta, ed oltre il bordo superiore il
fluido continuerà a salire con una piuma. Con l’approssimazione dei Boundary
Layers pensiamo al moto confinato all’interno di una sottile regione vicino
alla piastra, al di fuori della quale il fluido è con buona approssimazione
fermo. Allo stesso modo esisterà un Boundary Layer termico al di fuori del
quale il fluido sarà alla temperatura imperturbata T0 .
In figura C.1 nella pagina seguente sono riportati a due diverse quote
i profili di velocità e temperatura ottenuti per integrazione numerica delle
(C.10). Questi profili non si discostano molto da quelli reali finantoché il
moto si mantiene laminare.
Al crescere di x aumenta la velocità massima; vediamo in che modo. Si
definisce ad ogni quota un numero di Grashof locale pari a:
Grx =
gα(Tp − T0 )x3
ν2
1
Ricordando che se Gr è abbastanza grande è Re ∼ Gr 2 possiamo stimare
la velocità caratteristica:
U=
1
1
ν
ν
Rex ∼ Grx2 ∝ x 2
x
x
Campo gravitazionale uniforme verticale. Data la simmetria il sistema è
bidimensionale.
1
Convezione C.4. Piastra verticale
x
181
x
Pr ≃ 1
umax
xcrit
gαΘx3crit
Grcrit =
∼ 109
ν2
1
u
∆T ′
−1
1
1
δ ∝ x4
rte
δ ∝ x Grx 4 ∝ x 4
Tp
umax
u
umax ∝ x
1
2
1
Tp
∆T ′
∆T ′ =
T − T0
∆T
=
Θ
Tp − T0
T0 < Tp
U0 = 0
y
y
Figura C.1: Piastra verticale calda: profili di velocità e temperatura
Ed avremo umax ∝ U . È possibile ora calcolare il flusso di fluido ascendente:
Z y
1
3
u(y) dy ∼ Uδ ∝ νGrx4 ∝ x 4
Pa
0
Consideriamo ora un numero di Prandtl non troppo discosto dall’unità
(condizione verificata per i fluidi gassosi) il Boundary Layer di temperatura
coincide con quello di velocità perché il numero di Reynolds e di Péclet sono
uguali.
Se pensassimo di aumentare la conducibilità termica del fluido, in modo
da diminuire il numero di Prandtl, il calore diffonderebbe più lontano e il
Boundary Layer di temperatura assumerebbe dimensioni maggiori; questo
comporterebbe un aumento il Boundary Layer di velocità perché il fluido
riscaldato per conduzione si muove per effetto della Bouyancy.
Se al contrario pensassimo di diminuire la conducibilità termica del fluido,
aumentando così P r , il Boundary Layer di temperatura diventa più sottile
di quello di velocità: il calore diffonde a breve distanza dalla parete, ma il
moto di questo sottile strato caldo trascina anche il fluido attiguo freddo
attraverso gli effetti viscosi.
Convezione C.4. Piastra verticale
182
rte
Una sintesi dell’andamento dei profili di velocità e temperatura al variare
di P r è rappresentata dai grafici in figura C.2, dove in ordinata ci sono le
grandezze riscalate u′ e T ′ , mentre in ascissa si pone il comodo parametro
1
η = Gr4 x 4 xy .
Si può notare come all’aumentare di P r il Boundary Layer di temperatura diminuisca maggiormente rispetto quello di velocità.
Figura C.2: Profili delle velocità e temperature nel Boundary Layer al variare
del numero di Prandtl
Pa
Come già anticipato, salendo verso l’alto il flusso laminare diventa instabile e subisce una transizione che dà luogo ad un flusso totalmente turbolento.
È estremamente difficile individuare un valore di Gr per il quale ha inizio
la questa transizione, in primo luogo perché il moto è visibilmente alterato
solo dopo una certa lunghezza da cui essa ha effettivamente inizio, inoltre
esso varia con P r ed è molto sensibile ai disturbi. Comunque, per fluidi con
P r ∼ 1 , si osserva un flusso sostanzialmente laminare per valori del numero
di Grashof minori di 109 .
Ci sono due meccanismi per cui il Boundary Layer diviene instabile: il
primo è comune ad altri shear-flow ed è legato all’aumento del numero di
3
Reynolds locale, Reδ = Uνδ ∝ x 4 . Il secondo è strettamente legato alla natura delle forze di Bouyancy, che tendono ad accentuare lo spostamento del
volumetto di fluido dal suo equilibrio dinamico. Questo secondo tipo di instabilità parte prima, a quote basse (se P r non è troppo piccolo), ma si
amplifica lentamente, quindi probabilmente solo il primo tipo dà inizio alla
transizione, eccetto forse i casi in cui P r è grande.
La transizione turbolenta è chiaramente visibile nel grafico in figura C.3
nella pagina seguente, che rappresenta il legame sperimentale tra il numero
Convezione C.4. Piastra verticale
183
rte
di Nüsselt locale Nux = Qx
( Q è ovviamente il calore trasmesso per unità
kΘ
di superficie) in funzione del numero di Rayleigh.
Figura C.3: Numero di Nüsselt al variare del tipo di moto
Notiamo che quando il flusso è laminare i logaritmi sono tra loro proporzionali, quindi si ha una legge del tipo: Nux ∝ Grxn . Talvolta anche la parte
turbolenta viene confusa con una retta (avente pendenza maggiore).
Il brusco aumento del numero di Nüsselt per Grx P r ∼ 109 coincide con
il passaggio dal regime di moto laminare a quello turbolento.
Un’ultima considerazione: riferendoci alla lunghezza totale della piastra,
se il moto non subisce transizioni:
QT L
∝ GrLn ∝ Θn
kΘ
Pa
NuL =
Quindi il calore totale scambiato deve aumentare col salto di temperatura secondo la legge: QT ∝ Θn+1 ; contrariamente alla convezione forzata la legge
di Newton2 non è più valida: il calore scambiato aumenta più che linearmente perché la temperatura rende il moto più vigoroso aumentando il calore
trasmesso.
Dal punto di vista pratico in genere si tiene conto dell’effetto complessivo
dei fenomeni convettivi mediante un’espressione analoga alla legge di Newton,
introducendo un coefficiente medio di trasmissione, detto di avvezione, h ,
una superficie di scambio S e un salto di temperatura medio:
Q = h S (Ts − Tamb )
La legge di Newton sulla trasmissione del calore esprime la proporzionalità tra calore
scambiato e salto di temperatura.
2
Convezione C.5. Nota conclusiva
184
I valori di h possono essere trovati in letteratura per le configurazioni
geometriche più semplici, ottenuti attraverso studi empirici.
Ad esempio per una superficie piana investita da un flusso di fluido di
velocità u∞ , considerando la coordinata x parallela al flusso si trova che:
r
1
u∞ x
hx x
3
, con Grx =
= 0.664 Grx Pr
Nux ≡
k
ν
rte
Questa relazione empirica permette di calcolare il coefficiente di avvezione
medio nota la superficie di scambio e le caratteristiche del fluido.
C.5
Nota conclusiva
Pa
In questa sezione è possibile apprezzare con quale sforzo e con quali approssimazioni si può costruire un modello teorico che consenta in qualche
modo di leggere e riutilizzare le osservazioni riguardanti i fenomeni convettivi.
Non c’è da stupirsi se tipicamente a livello ingegneristico si tiene conto di
questi fenomeni attraverso modelli piuttosto grossolani, essenzialmente basati
sul criterio della situazione peggiore, identificati con misure dirette o attraverso dati standard raccolti in tabelle. Questo approccio è stato storicamente
l’unica soluzione possibile quando non esistevano strumenti per l’integrazione
numerica, ma per un numeroso sottoinsieme di casi rimane tuttora la soluzione più ragionevole proprio perché affinare il modello comporterebbe un onere
computazionale immotivato: a questo sottoinsieme appartiene questo stesso lavoro, in cui considerare la non linearità dovuta ai fenomeni convettivi
avrebbe significato stravolgere (e complicare non poco) il percorso ottenuto per ottenere il modello, probabilmente senza ottenere un salto di qualità
apprezzabile (perché in esso convivono diverse grosse approssimazioni).
Bisogna sottolineare che negli ultimi tempi la crescente necessità di margini progettuali ridotti e la disponibilità di elaboratori elettronici con la necessaria capacità di calcolo hanno dato grande spinta allo sviluppo di prodotti
software che consentono di ottenere le soluzioni delle (C.7) anche per sistemi complessi. Questi strumenti sono sempre più perfezionati e il loro uso è
sempre più diffuso.
Bibliografia
rte
[BCCD98] Paolo Emilio Bagnoli, Claudio Casarosa, Mario Ciampi, and Enrico Dallago. Thermal resistance analysis by induced transient
(TRAIT) method for power electronic devices thermal characterization part i: Fundamentals and theory. IEEE Transactions on
Power Electronics, 13(6), November 1998.
[BCDN98] Paolo Emilio Bagnoli, Claudio Casarosa, Enrico Dallago, and
Marco Nardoni. Thermal resistance analysis by induced transient
(TRAIT) method for power electronic devices thermal characterization part ii: Practice and experiments. IEEE Transactions on
Power Electronics, 13(6), November 1998.
[BGG99]
Vítězlav Benda, John Gowar, and Duncan A. Grant. Power Semiconductor Devices - theory and applications. John Wiley &
sons, New York, 1999.
Pa
[BRH+ 03] D. Berning, J. Reichl, A. Hefner, M. Hernández, C. Ellenwood,
and J.S. Lai. High speed IGBT module transient thermal response measurements for model validation. In Conference Record of
the 38th IAS Annual Meeting, volume 24 of 3, pages 1826–1832.
Industry Applications Conference, 2003.
[DTL96]
Jean Marie Dorkel, Patrick Tounsi, and Philippe Leturcq. Threedimensional thermal modeling based on two-port network theory
for hybrid or monolitic integrated power circuits. IEEE transactions on components, packaging and manifacturing technology,
19(4):501–507, December 1996.
[GSH97]
C. Van Godbold, V. Anand Sankaran, and Jerry L. Hudgins.
Thermal analysis of high-power modules. IEEE transactions on
power electronics, 12(1):3–11, January 1997.
185
A. R. Hefner and D. L. Blackburn. Simulating the dynamic
electrothermal behavior of power electronic circuits and systems.
IEEE Transactions on Power Electronics, 8(4):376–385, 1993.
[HB94]
A. R. Hefner and D. L. Blackburn. Thermal component models for electrothermal network simulation. IEEE Transactions on Components, Packaging and Manufacturing Technology,
17(3):413–424, 1994.
[HCT88]
T. Hopkins, C. Cognetti, and R. Tiziani. Designing with thermal
impedance. In IEEE Semiconductor Thermal and Temperature
Measurement Symposium, page 55, San Diego, 1988.
rte
[HB93]
A. R. Hefner and D. M. Diebolt. An experimentally verified
IGBT model implemented in the saber circuit simulator. IEEE
Transactions on Power Electronics, 9(5):532–542, 1994.
[Hef94]
A. R. Hefner. A dynamic electro-thermal model for the IGBT.
IEEE Transactions on Industry Applications, 30(2):394–405,
1994.
[HM97]
A. R. Hefner and H. A. Mantooth. Electrothermal simulation of an IGBT PWM inverter. IEEE Transactions on Power
Electronics, 12(3):474–484, 1997.
[IV03]
John H. Lienhard IV and John H. Lienhard V. A heat transfer textbook. Phlogiston press, Cambridge Massachusetts, third
edition, 2003.
Pa
[HD94]
[LAN04]
Zhaohui Luo, Hyungkeun Ahn, and Mahmoud A. El Nokali. A
thermal model for insulated gate bipolar transistor module. IEEE
Transactions on Power Electronics, 19(4), July 2004.
[MN99]
Martin März and Paul Nance. Fundamentals of thermal resistance measurement. Technical report, Fraunhofer Institute
for Integrated Circuits, IIS-B, Erlangen, 1999. (and Infineon
Technologies AG, Munich).
[MUR95]
Ned Mohan, Tore M. Undeland, and William P. Robbins. Power
Electronics: Converters Application and Design. John Wiley, New
York, second edition, 1995.
[NVER02] Jody J. Nelson, Giri Venkataramanan, and Ayman M. EL-Refaie.
Fast thermal profiling of power semiconductor devices using
fourier techniques. Research report, University of WisconsinMadison, Department of Electrical and Computer Engineering,
1415 Engineering Drive Madison, WI 53706 USA, February 2002.
José Miguel Ortiz-Rodríguez. Electro-thermal modeling of a power electronic module. PhD thesis, University of Puerto Rico
Mayagüez campus, 2004.
[SEM]
Semikron International, 90431 Nürnberg. Application manual
Power Modules.
rte
[OR04]
John W. Sofia. Analysis of thermal transient data with synthesized dynamic models for semiconductor devices. IEEE Transactions on Components Packaging and Manufacturing Technology,
18(1):39–47, 1995.
[Sof95b]
John W. Sofia. Fundamentals of thermal resistance measurement.
Technical report, Analysis Tech, 1995. [email protected].
[SS91]
Gary L. Skibinski and Willam A. Sethares. Thermal parameter
estimation using recursive identification. IEEE Transactions on
Power Electronics, 6(2):228–239, April 1991.
[STK97]
J. Sigg, P. Türkes, and R. Kraus.
Parameter extraction
methodology and validation for an electro-thermal physicsbased NPT IGBT model.
Application Note AN-PSM2e,
Siemens AG, D-81739 Munich, Germany, October 1997.
http://www.siemens.de/.
Pa
[Sof95a]
[SWF98]
K. Sheng, B.W Williams, and S.J Finney. Maximum operating
junction temperature of PT and NPT IGBTs. IEEE Electronic
Letters, 34(23):2276–2277, November 1998.
[Tür01]
P. Türkes. Thermal network calculation for level-3 compact models. Application Note AN-PSM-12, Infineon Technologies AG,
August 2001. http://www.infineon.com/simulate.
[Tri77]
D.J. Tritton. Physical Fluid Dynamics. Van Nostrand Reinhold
Company, 1977. School of Physics University of Newcastle-uponTyne.
[XLH+ 02] Dewei Xu, Haiwei Lu, Lipei Huang, Satoshi Azuma, Masahiro
Kimata, and Ryohei Uchida. Power loss and junction temperature analysis of power semiconductor devices. IEEE transactions
on industry applications, 38(5):1426–1431, September/October
2002.
[YMCF01] Chan Su Yun, Paolo Malberti, Mauro Ciappa, and Wolfgang
Fichtner. Thermal component model for electrothermal analysis of IGBT module systems. IEEE Transactions on Advanced
Packaging, 24(3):401–406, August 2001.
Chan Su Yun. Static and dynamic thermal behavior of IGBT
power modules. Master’s thesis, Swiss Federal Institute of
Technology Zurich, 2000.
Pa
rte
[Yun00]
rte
Pa
Documento stampato con le Computer Modern Fonts
prime pianificazioni