2.4
Pacchetti d’onda
Come abbiamo visto, la soluzione (2.16) per la particella libera non somiglia
molto al moto di una particella libera classica, in quanto:
1. l’ampiezza della (2.16) è costante;
2. se la quantità di moto classica p deve corrispondere a h̄k, la velocità
dell’onda sembra essere la metà di ciò che ci si aspetterebbe.
Per poter ottenere un limite classico sensato, dobbiamo introdurre il concetto
di pacchetto d’onde, e assumere che il moto classico si ottenga sommando fra
loro molte onde piane del tipo (2.16), anzichè considerando un’onda sola.
Proviamo a considerare per un momento la sola parte spaziale (non è una
limitazione: è la soluzione della corrispondente equazione di Schrödinger indipendente dal tempo, e conosciamo il suo legame (2.13) con la soluzione completa), e ipotizziamo una soluzione oscillante come un’onda piana con un certo
vettore d’onda k0 , ma localizzata nello spazio in una regione di lunghezza L:
ψ(x) = eik0 x se |x| ≤ L/2
= 0
se |x| > L/2
(2.22)
Ci chiediamo se la (2.22) è una soluzione dell’equazione (2.18). Per fare questo,
appoggiamoci sulla teoria delle trasformate di Fourier, secondo cui qualunque
ψ(x) può essere espressa in termini di uno sviluppo in onde:
Z
+∞
ψ(x) =
F (k)eikx dk
(2.23)
−∞
dove le ampiezze F (k) si possono ottenere da una ψ(x) mediante una trasformata inversa,
Z
1 +∞
F (k) =
ψ(x)e−ikx dx
(2.24)
2π −∞
Nel nostro caso, la forma particolare (2.22) che abbiamo ipotizzato dà
F (k) =
1
2π
Z
L/2
e−i(k−k0 )x dx =
−L/2
L sin[(k − k0 )L/2]
2π (k − k0 )L/2
(2.25)
Come noto, la funzione sin y/y ha un picco di ampiezza 1 a y = 0, si annulla
per y = ±π, e presenta altre oscillazioni di ampiezza molto inferiore al picco
principale, che decadono come 1/y al crescere di y. Pertanto F (k) ha un picco
di altezza massima L/2π e larghezza a metà altezza approssimativamente ∆k ∼
2π/L. Abbiamo quindi trovato che è possibile costruire una soluzione localizzata
e oscillante con numero d’onda k0 , ma per fare questo dobbiamo sovrapporre
un insieme di onde piane con numero d’onda centrato attorno a k0 ma con una
dispersione ∆k.
La (2.22) descrive pertanto una particella quantistica la cui posizione è
determinata con una incertezza ∆x ∼ L, e la cui quantità di moto è determinata
con una incertezza ∆p = h̄∆k ∼ h/L. Abbiamo quindi ∆x∆p ∼ h, che è
l’espressione del principio di indeterminazione. Il problema di una singola onda
16
piana è che la sua quantità di moto è determinata esattamente, e questo rende
la posizione totalmente indefinita.
Analoghe considerazioni possono essere effettuate per quanto riguarda la
variabile temporale. In questo caso si effettuano trasformate di Fourier tra la
variabile temporale e lo spazio delle frequenze. Se un treno d’onde ha una
durata finita complessiva T (che sarà quindi il ∆t) ed effettua N oscillazioni, la
precisione nella determinazione della sua frequenza è circa pari a 1 oscillazione,
ossia
∆ω
1
2π/ω0
∼
(2.26)
=
ω0
N
T
da cui
∆t∆ω ∼ 2π
(2.27)
ovvero l’indeterminazione nel tempo e quella nell’energia sono legate da ∆t∆E ∼
h.
Il limite classico della meccanica quantistica passa quindi necessariamente
attraverso i pacchetti d’onda per poter confinare la particella in una regione
finita. Va notato che alla dispersione in k corrisponderà anche una dispersione in
energia. Ogni componente k soddisfa all’equazione di Schrödinger indipendente
dal tempo per l’energia E = h̄2 k 2 /2m. Le componenti si sommano solo dopo
aver moltiplicato ciascuna di esse per il fattore di fase dipendente dal tempo,
secondo la (2.20). Questo fa sı̀ che l’aspetto del pacchetto possa in generale
variare nel tempo.
Occupiamoci allora della seconda questione relativa alla velocità. Immaginiamo di costruire un semplice pacchetto costituito da due sole onde, una di
numero d’onda k0 − δk e una di numero d’onda k0 + δk, dove δk è piccolo. Le
frequenze angolari corrispondenti (attraverso la 2.17) saranno ω0 −δω e ω0 +δω.
Ψ(x, t) = ei(k0 −δk)x e−i(ω0 −δω)t + ei(k0 +δk)x e−i(ω0 +δω)t
= ei(k0 x−ω0 t) [2 cos(δkx − δωt)]
(2.28)
ossia un’onda piana di numero d’onda k0 modulata da un fattore oscillante con
un numero d’onda assai più piccolo, ossia con una lunghezza d’onda molto più
grande. Questo è un inviluppo analogo a quello che dà luogo ai battimenti in
acustica. L’inviluppo si muove con una velocità diversa da quella dell’onda che
contiene. Possiamo trovare la sua velocità seguendo ad esempio lo spostamento
nel tempo del massimo corrispondente a un argomento nullo del coseno:
δkx − δωt = 0
ossia
(2.29)
dω
(2.30)
dk
La quantità vg è detta velocità di gruppo. Dato un pacchetto d’onde qualsiasi,
per ogni coppia di componenti vicine si può pensare che valga la (2.30), che
quindi rappresenta la velocità del pacchetto stesso. Nel limite classico, è la
velocità di gruppo che diventa la velocità della particella classica. Dalla (2.17)
si ha subito infatti
h̄k
vg =
(2.31)
m
x = vg t
,
17
vg =
che è quanto ci si aspetta. Nel caso di una particella libera, la velocità del
pacchetto è quindi doppia rispetto a quella dell’onda, e corrisponde al limite
classico.
Da notare infine che il pacchetto si delocalizza nel tempo perchè ciascuna
delle sue componenti k si propaga con una velocità ω/k diversa da quella delle
altre componenti. Affinchè il pacchetto non si degradi, occorrerebbe che ω/k
fosse una costante. Questo è in effetti il caso delle onde elettromagnetiche nel
vuoto, ma non delle onde associate a particelle con massa finita.
2.5
Potenziali modello
Consideriamo qualche caso di potenziale semplice. I casi seguenti potranno
sembrare artificiosi e di dubbio interesse, ma in realtà molti sistemi fisici sono
descrivibili in modo approssimato con potenziali molto semplici.
2.5.1
Gradino di potentiale
Consideriamo il seguente potenziale a gradino: V (x) = 0 per x < 0, V (x) = W
per x > 0 (W > 0). Si presenta subito una difficoltà: cosa succede alla funzione
d’onda nel punto di discontinuità, x = 0, del potenziale? La risposta è nota dalla
teoria matematica, ma possiamo darne una ”fisica” considerando il potenziale
discontinuo come limite di potenziali continui che passano da V (0) = 0 a V () =
W per → 0. Riscriviamo l’equazione di Schrödinger come:
ψ 00 (x) =
2m
(V (x) − E) ψ(x)
h̄2
(2.32)
da cui si ricava l’ovvio risultato che la derivata seconda della funzione d’onda è
discontinua in x = 0. Integriamo fra x = 0 e x = :
ψ 0 () − ψ 0 (0) =
2m
h̄2
Z
(V (x) − E) ψ(x)dx.
(2.33)
0
Siccome sia V (x) che ψ(x) sono finiti nell’intervallo (0, ), il secondo membro
tende a 0 per → 0. Quindi ψ 0 () → ψ 0 (0). Analogamente si dimostra la
continuità di ψ(x) intorno a x = 0. Queste sono le condizioni da imporre
ovunque sia presente un gradino (finito) di potenziale.
Per risolvere il problema, si devono distinguere tre intervalli di energia:
0) E < 0: non esistono soluzioni, o più esattamente, le sole soluzioni sono
esponenziali reali, che divergono e quindi non sono fisiche.
1) E > W : le soluzioni sono onde piane,
ψ(x) = Aeikl x + Be−ikl x ,
√
x < 0,
kl =
ψ(x) = Ceikr x + De−ikr x , x > 0, kr =
2mE/h̄;
(2.34)
q
2m(E − W )/h̄.(2.35)
Le condizioni di continuità a x = 0 ci danno
A+B = C +D
(2.36)
kr (A − B) = kl (C − D).
(2.37)
18
Abbiamo quindi quattro incognite e due condizioni, più la normalizzazione
(nel nostro caso, arbitraria). Rimane quindi una costante indeterminata.
In effetti, ci sono due soluzioni per ogni valore di energia e quindi ogni
combinazione lineare delle due è una soluzione accettabile. Possiamo per
esempio selezionale la soluzione corrispondente ad un’onda incidente da
sinistra e trasmessa a destra (D = 0). In questo caso, si trova
√
√
B
C
E− E−W
B
√
,
=√
=1+ .
(2.38)
A
A
A
E+ E−W
2) 0 < E < W : le soluzioni sono onde piane per x < 0, onde evanescenti per
x > 0:
√
ψ(x) = Aeikl x + Be−ikl x , x < 0, kl = 2mE/h̄;
(2.39)
ψ(x) = Ce−kr x ,
x > 0,
kr =
q
2m(W − E)/h̄.
(2.40)
L’esponenziale con il segno opposto per x > 0 è ovviamente non accettabile! Le condizioni di continuità a x = 0 ci danno
kr (A − B) = −kl C
A + B = C,
da cui
√
√
E−i W −E
B
√
= √
,
A
E+i W −e
B
C
=1+ .
A
A
(2.41)
(2.42)
In questo caso c’è una sola soluzione per ogni valore di E: l’autovalore è
non degenere (cosa prevista dal teorema di non degenerazione, valido in
sistemi unidimensionali).
Da notare come nell’intervallo 2 la funzione d’onda nella regione x > 0, classicamente inaccessibile, è evanescente e rapidamente tendente a zero, ma comunque
non nulla: esiste una probabilità piccola ma finita di trovare la particella in una
zona dove ”non dovrebbe stare”. E’ un fenomeno intrinsecamente quantomeccanico, di grande rilevanza.
2.5.2
Barriera di potenziale
Consideriamo ora una barriera di potenziale: V (x) = W per |x| < a/2, V (x) = 0
per x < −a/2 e x > a/2. In questo caso si richiedono due operazioni di
”matching” della funzione d’onda, a x = −a/2 e x = a/2. Per gli intervalli
di energie 0 e 1 sopra introdotti, i risultati sono del tutto analoghi al caso del
gradino: nessuna soluzione e due soluzioni degeneri per ogni E, rispettivamente.
Più interessante il caso dell’intervallo 2. Consideriamo una soluzione che si
propaga verso destra nella regione x < −a/2. Tale soluzione diventerà un’onda
evanescente nella regione classicamente proibita |x| < a/2. Tuttavia in x =
a/2 sopravviverà una componente piccola di onda evanescente che avrà come
corrispettivo un’onda propagantesi nella regione x > a/2. Esistono quindi
soluzioni che ”scavalcano” la barriera: è il cosiddetto effetto tunnel.
19
Scriviamo la funzione d’onda per il caso come quello descritto sopra, assumendo per semplicità il coefficiente dell’onda incidente uguale a 1:
√
(2.43)
ψ(x) = eikx + Ae−ikx , x < −a/2, k = 2mE/h̄;
0
0
ψ(x) = Be−k x + B 0 e−k x ,
ikx
ψ(x) = Ce
,
|x| < a/2,
k0 =
q
2m(W − E)/h̄; (2.44)
x > a/2.
(2.45)
Notare la presenza di una componente di onda crescente nella funzione d’onda
per |x| < a/2: in effetti, non abbiamo il diritto di escluderlo a priori! Il calcolo,
relativamente semplice ma un po’ laborioso, dà il seguente risultato:
4E(W − E)
4E(W − E) + W 2 sinh2 (k 0 a)
W 2 sinh(k 0 a)
.
= 1 − |C|2 =
4E(W − E) + W 2 sinh2 (k 0 a)
|C|2 =
(2.46)
|A|2
(2.47)
Il caso E > W si può ottenere con la sostituzione
0
p
k −→ ik1 = i
2m(E − W )
h̄
(2.48)
e dà il seguente risultato:
4E(E − W )
4E(E − W ) + W 2 sin2 (k1 a)
W 2 sin(k1 a)
.
= 1 − |C|2 =
4E(E − W ) + W 2 sin2 (k1 a)
|C|2 =
(2.49)
|A|2
(2.50)
|C|2 è detto coefficiente di trasmissione, mentre |A|2 è il coefficiente di riflessione. In generale, essi dipendono dall’energia e dalla forma del potenziale.
2.5.3
Buca di potenziale
La buca di potenziale è una schematizzazione molto semplice di un potenziale
attrattivo o vincolante: V (x) = −W per |x| < a/2, V (x) = 0 per x < −a/2
e x > a/2. Consideriamo l’intervallo di energia interessante: −W < E < 0.
Scriviamo la soluzione sotto la forma
0
k0 =
ψ(x) = Aek x ,
ψ(x) = B cos(kx − α),
−k0 x
ψ(x) = Ce
,
k=
q
2m|E|/h̄,
q
2m(W + E)/h̄,
x ≥ a/2,
x ≤ a/2
|x| ≤ a/2
(2.51)
(2.52)
(2.53)
più conveniente per i calcoli (scrivere la soluzione come coseno + fase è del tutto
equivalente a scrivere come somma di esponenziali complessi: possiamo sempre
ricondurci a soluzioni reali). Le condizioni di continuità a x = −a/2 e x = a/2
sono:
0
Ae−k a/2 = B cos(−ka/2 − α),
0
k 0 Ae−k a/2 = −kB sin(−ka/2 − α), (2.54)
20
0
0
Ce−k a/2 = B cos(ka/2 − α),
−k 0 Ce−k a/2 = −kB sin(ka/2 − α),
(2.55)
ovvero, dividendo membro a membro,
k tan(ka/2 + α) = k 0 ,
k tan(ka/2 − α) = k 0 .
(2.56)
Queste due condizioni possono essere soddisfatte contemporaneamente solo se
α = 0 o se α = π/2. Distinguiamo i due casi:
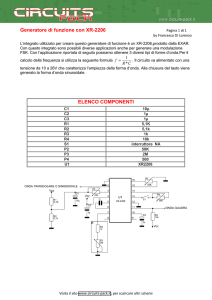
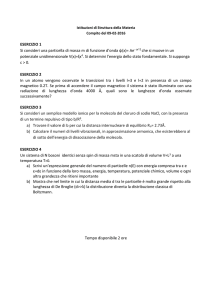
• Soluzioni pari (α = 0): esistono solo a energie per cui k tan(ka/2) = k 0 .
Introduciamo le variabili ausiliarie ζ = ka/2 e η = k 0 a/2. Le soluzioni si
possono trovare graficamente dall’intersezione delle due curve:
η2 + ζ 2 =
2m W a2
,
h̄2 4
η = ζ tan ζ
(2.57)
• Soluzioni dispari (α = π/2), per le quali k/ tan(ka/2) = −k 0 . Si procede
come sopra, cercando le intersezioni delle curve
η2 + ζ 2 =
2m W a2
,
h̄2 4
10
η = −ζ/ tan ζ
(2.58)
x tan x
-x/tan x
sqrt(1-x^2)
sqrt(9-x^2)
sqrt(36-x^2)
8
6
4
2
0
0
1.5708
3.1416
4.7124
6.2832
Si trova uno spettro (ovverosia l’insieme delle soluzioni) discreto, ovvero
formato da valori isolati di E. C’e’ sempre almeno una soluzione (è una caratteristica del potenziale considerato che non vale per altre forme di potenziale).
Lo spettro discreto è una caratteristica degli stati legati, ovvero confinati in una
zona di spazio. Notiamo anche che:
• Le soluzioni sono non degeneri; Questa è una caratteristica dello spettro
discreto nei sistemi unidimensionali (teorema di non degenerazione).
• Le soluzioni sono o pari: ψ(x) = ψ(−x), o dispari: ψ(x) = −ψ(−x),
rispetto all’operazione di inversione, x → −x. Questa è una conseguenza
della simmetria del potenziale, V (x) = V (−x).
• La soluzione di più bassa energia (lo stato fondamentale) è pari, quella di
energia subito sopra è dispari, e cosı̀ via. Questa è una proprietà generale
dei potenziali unidimensionali simmetrici per inversione.
21
• Lo stato fondamentale non ha nodi (ovverosia non passa mai per lo zero:
per nessun x, ψ(x) = 0); le soluzioni di energia crescente hanno un numero
crescente di nodi (1,2,3,...). Anche questa è una proprietà generale dei
potenziali unidimensionali.
Ovviamente non dobbiamo dimenticare che esiste anche uno spettro continuo
di soluzioni non legate e due volte degeneri per E > 0.
E‘ utile il confronto con il caso della buca infinita, le cui soluzioni si ottengono banalmente imponendo che la funzione d’onda sia nulla cove il potenziale
diventa infinito. Si tratta di condizioni diverse da quelle imposte per discontinuità finite del potenziale; ci se ne può convincere con una procedura di limite.
Conviene traslare l’origine rispetto al caso precedente e consideraro un
potenziale V (x) = 0 fra x = 0 e x = a, V (x) = ∞ al di fuori di tale intervallo. Imponiamo la condizione ψ(0) = ψ(a) = 0 sulle soluzioni per la particella
libera. Si ottiene
ψn (x) = sin(kn x),
kn =
nπ
a
En =
h̄2 k 2
n 2 h2
=
,
2m
8ma2
n = 1, ..., ∞ (2.59)
Si ritrovano tutte le caratteristiche del caso della barriera finita, salvo il numero
di soluzioni (infinito per la barriera infinita) e lo spettro continuo (qui assente).
Si notano inoltre due aspetti molto importanti:
• le funzioni d’onda sono ortogonali fra di loro:
Z
ψn∗ (x)ψm (x) = 0
se
n 6= m,
(2.60)
• le funzioni d’onda formano un insieme completo, ovvero qualunque funzione d’onda può essere espressa come somma, in generale infinita, delle
soluzioni dell’equazione di Schrödinger.
Tali aspetti sono presenti anche nel caso della buca finita, in quanto derivano
da proprietà generali dell’equazioni di Schrödinger, ma sono in questo caso
particolarmente visibili.
22