Tesina di Fondamenti di Automatica
A.A. 2016-17
Mirco Rampazzo
[email protected]
http://automatica.dei.unipd.it/people/rampazzo/teaching.html
Regole generali
A margine del corso di Fondamenti di Automatica è prevista la presentazione facoltativa di un elaborato. La prova viene svolta fuori dagli orari di lezione e può essere
redatta, anche in gruppo, no ad un massimo di tre studenti.
traccia tra quelle proposte.
Si deve scegliere una
L'elaborato nale verrà valutato con un punteggio da 0
a 2 punti: 0 signica elaborato non consegnato o del tutto insuciente, 2 elaborato
soddisfacente. Criterio principale per la valutazione è la capacita dello studente di applicare quanto appreso durante il corso di Fondamenti di Automatica a dei casi pratici;
la qualità, la modalità di presentazione dei risultati, l'ordine e la chiarezza espositiva
sono altresì valutate.
L'elaborato deve essere sintetico ed esauriente allo stesso tem-
po; ogni passaggio va giusticato. Gli elaborati (preferibilmente in bianco/nero) vanno
redatti a computer ed inviati, in formato pdf, all'indirizzo di posta elettronica mir-
[email protected] entro il 18 Gennaio 2017.
Matlab/Simulink sono richiesti:
tutti i computer dei laboratori informatici DEI ne sono provvisti.
1
Tesina 1
I pazienti aetti da insucienza cardiaca possono trarre benecio da pompe ventricolari
sviluppate per operare in combinazione con il cuore naturale.
In condizioni di bassa
portata cardiaca un dispositivo elettronico di assistenza ventricolare (EVAD) aiuta il
cuore ammalato per garantire un'adeguata perfusione sanguigna dell'organismo. L'obiettivo è quello di controllare il sistema e poterne regolare la portata per soddisfare la
domanda metabolica del paziente.
Il dispositivo si compone solitamente di un motore, una pompa, di una cannula di
prelievo nella zona apicale del ventricolo sinistro, di una cannula d'immissione nell'aorta,
unitamente ad un sistema di controllo e di rifornimento energetico (batterie ricaricabili),
gura 1.
Figura 1: Dispositivo elettronico di assistenza ventricolare (EVAD).
Si consideri il caso in cui l'EVAD ha un unico ingresso, la tensione applicata al motore/pompa, e una singola uscita, la porta di sangue. Il sistema di controllo dell'EVAD
regola il usso di sangue. Uno schema di controllo a catena chiusa è mostrato in gura
2 dove il sistema composto da motore, pompa, cannule, etc. è modellato da un ritardo
nominale,
τ = 1s.
Giovandosi dell'ambiente di simulazione Matlab/Simulink rispondere
ai seguenti quesiti.
i)
Considerato un controllore del tipo:
Gc (s) =
5
s(s + 10)
1. rappresentare la risposta indiciale del sistema a catena chiusa, vericare che la
sovraelongazione massima percentuale è inferiore al
nullo;
2
10%
e che l'errore a regime è
Figura 2: Sistema di controllo a catena chiusa.
2. determinare il massimo ritardo possibile,
τc ,
in modo che il controllore continui a
stabilizzare il sistema a catena chiusa;
3. disegnare il margine di fase in funzione del ritardo no al massimo valore ammesso
per assicurare la stabilità del sistema;
4. tracciare il diagramma di Nyquist relativo a
per
GOL (s) = Gc (s)G(s)
per
τ = 1s
e
τ = τc ;
5. come può essere interpretato il margine di fase quando è positivo?
ii)
1
Progettare
tre controllori:
1.
Gc1 (s) = K/s,
2.
Gc2 (s) = Kp + Ki /s
3.
Gc3 (s) = Kp + Ki /s + sKd
di tipo PI,
di tipo PID,
tali che la risposta al gradino sia caratterizzata da una sovraelongazione massima minore
o uguale al 10% ed un errore a regime inferiore al 5%.
Si tenga presente che, per
prolungare la durata delle batterie, la tensione è limitata a 30 V.
Comparare le prestazioni dei tre controllori riportando in una tabella, la sovraelongazione massima, il tempo di salita (10-90%), il tempo di picco (ascissa del massimo
assoluto se nita) ed il tempo di assestamento (al 2%).
1 Si
può pensare di approssimare il ritardo G(s) = e−τ s con una approssimazione di Padé del primo
o secondo ordine:
e−sτ ≈ Gp1
τ
s)
2
=
τ ;
(1 + s)
2
(1 −
e−sτ ≈ Gp2
3
τ
s+
2
=
τ
(1 + s +
2
(1 −
τ2 2
s )
12
.
2
τ 2
s )
12
Tesina 2
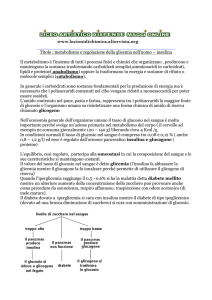
Il diabete è un disturbo del sistema di regolazione glucosio-insulina che causa nel malato un'iperglicemia cronica. L'aumento di glucosio nel sangue del soggetto aetto da
diabete è l'indice di una incapacità del sistema di mantenere la concentrazione entro
limiti che, siologicamente, sono abbastanza contenuti. Una possibile terapia prevede
l'impiego di microinfusori automatici, gura 3.
Figura 3: Pompa di insulina automatica.
Per il sistema glucosio-insulina si consideri il seguente modello stazionario relativo
2
ad un soggetto sano :
Ġ(t) = SG Gb − G(t)[SG + Z(t)] +
Ż(t) = −p2 Z(t) + p3 [I(t) − Ib ].
1
U (t),
VG
(1)
(2)
dove:
G(t)
è la concentrazione di glucosio nel plasma;
U (t)
è l'ingresso di glucosio dovuto al pasto;
Z(t) è l'eetto sulla dinamica del glucosio da parte della concentrazione di insulina
nei uidi interstiziali;
I(t)
è la concentrazione di insulina nel plasma;
2 In
un soggetto diabetico di tipo 1 (caratterizzato da assoluta decienza di insulina causata dalla
distruzione delle b-cellule) il pancreas non produce insulina, mentre gli altri processi (assorbimento
di glucosio dal pasto e scomparsa insulino-indipendente SG ) rimangono simili a quelle di un soggetto
normale. Per simulare tale comportamento tutti i parametri del modello sono mantenuti ai valori
del soggetto sano, ma non compare risposta insulinica. Le equazioni del modello sono le stesse di un
soggetto sano e uguale è l'ingresso U (t) di glucosio dal pasto, ma I(t) = Ib = 0 quindi Z(t) = 0. Il
modello si riduce quindi alla sola equazione (1) per il glucosio.
4
SG
descrive la velocità con cui il glucosio viene prodotto e scompare dal plasma
in condizioni basali, quando
VG
p2
I(t) = Ib
quindi
Z(t) = 0;
è il volume di distribuzione di glucosio nel plasma;
e
p3
sono due parametri che descrivono il legame tra l'insulina nel plasma e
l'insulina nei uidi interstiziali: in particolare
p2
è la costante di tempo e
p3
il
guadagno;
Gb
e
Ib
sono le concentrazioni basali di glucosio e insulina nel sangue.
In gura 4 è riportato uno schema compartimentale del modello nora descritto.
Figura 4: Schema compartimentale del modello glucosio-insulina.
Nel soggetto sano il pancreas produce insulina in risposta ad uno stimolo di glucosio;
l'andamento medio misurato nei soggetti sani rappresenta l'ingresso
I(t) nelle equazioni
dierenziali.
Quesito 1
La comparsa di glucosio nel plasma derivante dall'assunzione di un pasto
concentrazione di insulina
I(t)
partire dal modello descritto dalle equazioni (1-2), dagli ingressi
gli andamenti della concentrazione di glucosio
1. soggetto (70 kg) sano,
3A
U (t)
3
e la
siano descritte tramite funzioni lineare a tratti .
Gb = 80
mg/dl,
G(t)
e di
Z(t)
U (t)
e
I(t)
riportare
nei seguenti due casi:
Ib = 3 µU/ml, [G(0) = Gb , Z(0) = 0]:
(a)
tU = [0, 5, 15, 30, 45, 60, 90, 120, 180, 420, 490, 600] min
Usano (tU ) = [0, 0, 5.36, 7.78, 6.00, 5.05, 4.77, 3.52, 2.09, 0.34, 0, 0]
(b)
tI = [0, 5, 15, 20, 30, 60, 120, 210, 300, 420, 600] min
Isano (tI ) = [Ib , 6, 23, 39, 64, 40, 19, 6, 3, Ib , Ib ] µU/ml
tale scopo, in Matlab si può pensare di usare il comando interp1, in Simulink
5
A
mg/Kg/min
lookup table.
2. soggetto (70 kg) diabetico di tipo 1,
Gb = 180
mg/dl,
Ib = 0 µU/ml, [G(0) =
Gb , Z(0) = 0]:
tU = [0, 5, 15, 30, 45, 60, 90, 120, 180, 420, 490, 600] min
Udiab (tU ) = [0, 0, 5.36, 7.78, 6.00, 5.05, 4.77, 3.52, 2.09, 0.34, 0, 0]
(a)
mg/Kg/min
Quesito 2
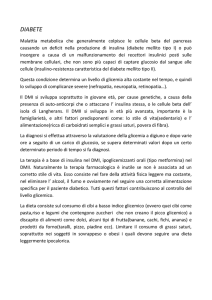
La condizione di iperglicemia è dannosa per l'organismo se mantenuta nel tempo: i
soggetti diabetici di tipo 1 vengono trattati con iniezioni quotidiane di insulina prima
dei pasti:
tali somministrazioni avvengono non per via intra-venosa bensì in modo
molto meno invasivo per via sottocutanea. In presenza di insulina il modello glucosioinsulina di riferimento è quello del soggetto sano (1-2) a cui si aggiunge una descrizione
del processo di assorbimento di insulina nella zona che va dal sottocute al sangue. Il
modello tricompartimentale risulta, gura 5:
1
I˙1 (t) = −k1 I1 (t) + ID(t),
VI
I˙2 (t) = −k1 I2 (t) + k1 I1 (t),
˙ = −nI(t) + k1 I2 (t).
I(t)
(3)
(4)
(5)
dove:
ID(t)
I(t)
è l'infusione di insulina;
è la concentrazione di insulina nel plasma;
I1 (t)
è la concentrazione di insulina nel sito di infusione;
I2 (t)
è un compartimento di insulina più interno, utile per descrivere il processo
di assorbimento da parte del plasma dell'insulina stessa.
Figura 5: Modello tricompartimentale.
6
1. Avendo a disposizione il modello che lega la velocità di somministrazione di insulina alla glicemia si può pensare di progettare un controllore che lavori a catena
chiusa. Si consideri un sistema di controllo che comprende un dispositivo per la
misura in linea del glucosio e un infusore in grado di modulare la somministrazione di insulina, gura 6. Per il modello (1-5), con
Gb = 180
mg/dl,
Ib = 0 µU/ml,
si consideri il punto di lavoro caratterizzato da:
assenza della perturbazione da pasto:
il glucosio si mantiene prossimo al valore target:
c'è un ingresso di insulina che mantiene questo valore di glicemia, questo
−1
implica Z(0) 6= 0 min .
2. Calcolare i valori di
U =0
mg/Kg/min.
G(0) = Gtarget = 130 mg/dl;
[Z(0), I1 (0), I2 (0), I(0)], ID(0).
3. Linearizzare il modello (1-5) nell'intorno del punto di lavoro [G(0),
Z(0), I1 (0),
I2 (0), I(0)], ID(0).
4. Per il modello linearizzato tracciare le risposte impulsiva ed indiciale.
5. Relativamente al modello linearizzato si progetti un controllore di tipo PID e si
riporti l'andamento della concentrazione di glucosio
polata
ID(t)
G(t)
e della variabile mani-
in risposta ad una perturbazione dovuta ad un pasto
Udiab (tU ).
6. Si applichi il controlore PID al modello non lineare e si riporti l'andamento della
concentrazione di glucosio in risposta alla medesima perturbazione dovuta ad un
pasto
Udiab (tU ).
Confrontare tale risposta con quella ottenuta al punto precedente.
Figura 6: PID.
7
Tesina 3
Il pilota automatico di un aereo jet può essere usato in una delle sue modalità per
controllare la quota di volo. Per progettare la porzione dell'anello relativa al controllo di
quota, è rilevante la sola dinamica dell'aereo a lungo termine. La relazione linearizzata
tra l'altezza e l'angolo del timone di profondità per la dinamica a lungo termine è:
G(s) =
20(s + 0.01)
h(s)
=
,
2
δ(s)
s(s + 0.01s + 0.0025)
ft
deg
Il pilota automatico riceve dall'altimetro un segnale elettrico proporzionale alla quota. Questo segnale è confrontato con il segnale di riferimento (proporzionale alla quota
prescelta dal pilota) e la dierenza rappresenta il segnale di errore.
Figura 7: Jet.
Il segnale di errore viene modicato da un compensatore e poi utilizzato per comandare l'attuatore del timone di profondità.
Uno schema a blocchi de sistema è
rappresentato in gura 8. Si deve progettare tale compensatore.
1. Considerare dapprima l'impiego della sola azione proporzionale
D(s) = K
(a) Usare Matlab per tracciare il diagramma di Bode del sistema ad anello aperto
per
D(s) = K = 1.
(b) Quale valore di
(|G|
= 1)
K
comporta una pulsazione di attraversamento (cioè dove
pari a 0.16 rad/s?
(c) Con tale valore di
K,
se chiudessimo l'anello, il sistema risulterebbe stabile?
(d) Quale è il margine di fase (PM) con tale valore di
8
K?
Figura 8: Sistema di controllo.
(e) Tracciare il diagramma di Nyquist del sistema ed individuare accuratamente
tutti i punti nei quali la fase vale 180° o il modulo vale 1.
(f ) Usare Matlab per tracciare il luogo delle radici rispetto a
posizioni dei poli corrispondenti ai valori di
K
K
e individuare le
individuati al punto 1(b).
(g) Quale sarebbe l'errore a regime se il comando fosse un cambiamento a gradino
di 1000 piedi?
2. Assumere un compensatore del tipo:
D(s) = K
(a) Scegliere i parametri
K, T
e
Ts + 1
αT s + 1
α in modo che la pulsazione di attraversamento
sia 0.16 rad/s e PM risulti maggiore di 50°.
ponendo il diagramma di Bode di
Vericare il progetto sovrap-
D(s)G(s)/K
al diagramma tracciato al
punto 1(a) e misurare direttamente PM.
(b) Usare Matlab per tracciare il luogo delle radici rispetto a
K
per il sistema che
include il compensatore progettato al punto 2(a). Individuare la posizione
delle radici corrispondenti al valore di
K
di cui al punto 2(a).
(c) I piloti automatici di quota posseggono anche una modalità di funzionamento
nella quale la velocità di salita è misurata direttamente e comandata dal
pilota.
i. Disegnare il diagramma a blocchi per tale modalità.
ii. Calcolare la relativa
iii. Progettare
D(s)
G(s).
in modo che il sistema abbia la stessa pulsazione di
attraversamento che nella modalità quota e che PM risulti superiore a
50°.
9