CAPITOLO 6
SISTEMI DI MISURA E LORO CARATTERISTICHE
SCHEMATIZZAZIONE DI UNO STRUMENTO DI MISURA
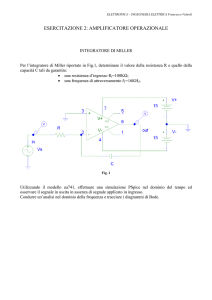
Per facilitare l'analisi generalizzata di uno strumento di misura si può introdurre la schematizzazione di fig.6.1.
Grandezza
fisica
Elemento di
conversione
della variabile
Elemento
sensibile
primario
Elemento di
trasmissione
della variabile
linea
Osservatore
linea
Elemento di
manipolazione
della variabile
Elemento di
presentazione
della variabile
Calcolatore
Registratore
Fig.6.1 - Schematizzazione di uno strumento di misura.
Gli elementi schematizzati hanno solo una importanza funzionale e non fisica e possono presentare anche un ordine
diverso, essi sono:
• elemento sensibile primario: è quello che viene in contatto con il mezzo da misurare e che produce in
uscita una variabile che dipende dalla grandezza da misurare secondo una certa legge. È importante
notare che si preleva sempre una piccola quantità di energia dal sistema da misurare, per cui esisterà sempre
un elemento di disturbo più o meno evidente causato dalla presenza del sensore. La sua uscita è una
variabile fisica opportuna come uno spostamento, una pressione, una tensione, etc.;
• elemento di conversione della variabile: non sempre la variabile fisica in uscita dal sensore è idonea per
eseguire una determinata funzione, per cui occorre spesso convertire questa variabile intermedia in una più
adatta allo scopo della misura;
• elemento di trasmissione della variabile: si rende necessario quando i componenti dello strumento sono
fisicamente separati, oppure quando l'osservatore è posto lontano dal processo da misurare, esso ha lo
scopo di inviare a distanza il segnale senza perdite apprezzabili;
• linea: mezzo trasmissivo idoneo per inviare il segnale a distanza con basse perdite e con buona immunità ai
disturbi;
• elemento di manipolazione della variabile: provvede quindi al trattamento o condizionamento del
segnale: amplificazione, filtraggio, introduzione di costanti aggiuntive, linearizzazione etc.;
• elemento di presentazione della variabile: permette di visualizzare la misura su un indicatore per un
osservatore umano o di convertirla in dato numerico per un eventuale elaboratore di processo. Spesso è
richiesta anche una registrazione permanente del segnale.
Nel caso di un sistema di acquisizione digitale, che campiona e digitalizza il segnali ad intervalli di tempo regolari,
in rispetto del teorema di campionamento, i dati potranno essere registrati:
• su supporto cartaceo: con stampante alfanumerica o grafica,
• su supporto magnetico: dischi o nastri magnetici digitali,
• su altri supporti digitali permanenti (RAM non volatili, flash card, dischi ottici, etc).
I sistemi digitali basati su microcalcolatori possono elaborare automaticamente, anche in tempo reale, grandi quantità
di dati. Occorre però avere particolare cura nello stabilire i tempi di campionamento del segnale tenendo conto della
sua banda passante. Mentre per i registratori analogici occorre stabilire la velocità di trascinamento del nastro
magnetico o della carta in base alla dinamicità del segnale.
Gli indicatori analogici sono costituiti da un ago e da una scala graduata, e quelli digitali da un display numerico.
Questi ultimi si stanno ormai diffondendo per la loro immediata lettura e sono particolarmente usati nelle
apparecchiature elettroniche, dove la variabile trasmessa è un segnale elettrico (tensione o corrente). Se viene
utilizzato un computer di processo, tutte le variabili acquisite vengono normalmente visualizzate su un display
numerico, alfanumerico o grafico. Nei moderni impianti di automazione sono usati grandi monitor a colori con
rappresentazioni grafiche funzionali dell'impianto (quadri sinottici) e con la rappresentazione numerica o grafica dei
dati relativi ai campionamenti dei segnali nel tempo.
Automazione Navale 1 – G. Carrera – Capitolo 6 – rev.11/12/07
1
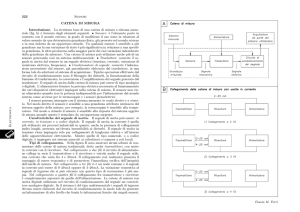
TRASDUTTORI E TRASMETTITORI
Nei moderni impianti industriali i sensori sono costituiti da
trasduttori, questi sono dei dispositivi che hanno in uscita sempre
Segnale
Grandezza
un segnale elettrico, come si vede in fig.6.2. Se questo segnale è
TRASDUTTORE
elettrico
fisica
idoneo ad essere trasmesso a distanza, si chiamano trasduttori
trasmettitori o semplicemente trasmettitori.
Fig. 6.2 - Trasduttore.
In fig. 6.3 è illustrato un trasmettitore con uscita in corrente, il tipo
più usato, con collegamento a tre fili, ma sono anche molto usati
quelli a due fili. Si consideri, ad esempio un trasmettitore di temperatura, usando la schematizzazione di fig.6.1, il
trasmettitore racchiude l’elemento sensibile
primario: una termoresistenza, che varia la
+ alimentazione
propria resistenza elettrica R in funzione della
grand.
VO
fisica
IO
temperatura T secondo una legge lineare:
RC
comune
∆R/R=α⋅∆T/T. Segue un circuito elettronico che
corrente
opera una conversione di variabile: dalla
Fig. 6.3 – Trasmettitore in corrente.
resistenza ∆R alla tensione ∆V ed un altro
circuito che converte la tensione in corrente, più idonea ad essere trasmessa su lunghe linee. Infatti, una linea lunga
presenta una non trascurabile caduta di tensione per via della resistenza dei fili, forzando una corrente non ha più
importanza la caduta di tensione. Lo standard più comune è quello in corrente 4÷20 mA, ossia, gli estremi
dell'intervallo dei valori della grandezza fisica da misurare (range) vengono a corrispondere a questi due valori di
corrente. Ad esempio, per un termometro che deve misurare la temperatura nell'intervallo −20 ÷ 70 [°C] si fa
corrispondere la corrente di 4 mA a −20°C e quella di 20 mA a +70°C, per cui la corrente trasmessa sarà: Io = 4 +
(T+20)⋅16/90 [mA], per T=0°C si hanno circa 7.55 mA in uscita. Un normale resistore RC agisce come elemento di
conversione corrente/tensione, ai cui capi si avrà la tensione: VO= IO⋅RC , per esempio, con RC=250 Ω , si ha una
tensione massima VO=0.02×250=5 V. L’avere imposto un valore minimo della corrente diverso da zero (4 mA)
serve per riconoscere facilmente una rottura della linea: in questo caso la corrente è zero ed il sistema segnala una
avaria.
Da qualche tempo esistono anche trasmettitori con uscita digitale, normalmente di tipo seriale, in questo caso essi
incorporano anche un microcalcolatore con convertitore ADC. Questi “sensori intelligenti” (Smart Sensor)
presentano una elevata immunità al rumore proprio per via della trasmissione digitale e possono essere anche
collegati in rete.
CALIBRAZIONE DI UNO STRUMENTO
Per risalire dal segnale o dato in uscita alla variabile fisica
applicata all’ingresso, occorre avere il certificato di calibrazione
dello strumento, solitamente fornito dal costruttore. In mancanza di
questo è indispensabile provvedere alla calibrazione mediante
applicazione all’ingresso di valori noti della grandezza fisica
(taratura diretta) o eseguendo una misura comparativa con un
sistema calibrato (taratura indiretta). La calibrazione di uno
strumento non rimane purtroppo permanente nel tempo a causa
prevalentemente dell’invecchiamento degli elementi componenti lo
stesso. Quindi la calibrazione andrebbe ripetuta almeno ad ogni
inizio di campagna di misure.
Se il trasduttore è lineare, si può approssimare il suo
comportamento con la retta che rende minimi gli scarti quadratici:
y(x)= ax+b
dove la pendenza a e l’intercetta b si ottengono facilmente da
Fig. 6.4 – Retta di regressione
apposite funzioni Excel o con opportuni programmi, usando le
formule riportate in fondo al capitolo. In fig.6.4 si vede la retta ai
minimi quadrati, ottenuta mediante regressione lineare sui dati sperimentali.
Poiché molti trasduttori presentano diversi comportamenti in salita ed in discesa (isteresi), si procede alla
calibrazione in entrambi i sensi.
CARATTERISTICHE PRINCIPALI DI UNO STRUMENTO
Si possono distinguere in:
• statiche: ossia quelle rilevate alla risposta a regime, quando il sistema ha esaurito la fase transitoria;
Automazione Navale 1 – G. Carrera – Capitolo 6 – rev.11/12/07
2
• dinamiche: caratteristiche rilevate durante il transitorio;
Le caratteristiche dinamiche sono significative quando i segnali variano abbastanza rapidamente col tempo e sono
molto importanti quando il sensore fa parte di un sistema di regolazione. Un trasduttore relativamente lento, ossia
con costanti di tempo dello stesso ordine di quelle del sistema da controllare, può quasi sicuramente rendere instabile
il sistema quando si chiude il loop. Un trasduttore con banda passante più piccola della variabile da misurare perde
parte dell’informazione e quindi provoca errori.
Un’altra caratteristica importante è il tipo di uscita elettrica: resistenza, corrente, tensione, carica, capacità, etc.
Caratteristiche statiche
• Sensibilità: è il rapporto uscita/ingresso. Essa è una costante per un sistema lineare. Deve essere il più grande
possibile in modo da ottimizzare il rapporto Segnale/Disturbo (Signal/Noise).
• Accuratezza: è la capacità dello strumento a fornire valori in uscita molto simili al valore atteso.
• Precisione: è la capacità dello strumento a fornire valori in uscita molto simili per gli stessi ingressi e nelle
stesse condizioni operative.
• Errore di linearità: rappresenta la precisione del sensore, è espresso usualmente dalla massima deviazione
(±% Fondo Scala) dalla retta ingresso-uscita (solo per trasduttori con un comportamento lineare atteso).
• Intervallo di ingresso (range or span): l'intervallo tra il valore minimo e quello massimo della grandezza
misurabile dal trasduttore. Un termine correlato è la dinamica del livello del segnale (dynamic range), ossia,
il rapporto tra il più alto ed il più basso valore del segnale in ingresso, generalmente espresso in decibel.
• Deriva termica (thermal drift): questo effetto è dovuto alla dipendenza dalla temperatura del trasduttore.
Essa è normalmente espressa in ±%FS/°C. Essa può essere suddivisa in deriva dello zero (Thermal Zero
Shift) e deriva della sensibilità (Thermal Sensitivity Shift). I dispositivi a semiconduttore sono quelli che
hanno grandi sensibilità ma anche le derive termiche più alte.
• Risoluzione o discriminazione (resolution or discrimination): è il minimo cambiamento di ingresso che
produce un cambiamento in uscita, nei sistemi digitali la risoluzione è il peso della cifra meno significativa.
• Isteresi: il valore dell’uscita dipende dal senso (crescente o decrescente) della variabile in ingresso, quindi
esistono due distinti valori in uscita per ogni valore in ingresso.
Caratteristiche dinamiche
• Risposta in frequenza: descrive il comportamento del trasduttore al variare della frequenza. La caratteristica
ingresso/uscita del trasduttore non è costante, ma varia con la frequenza. È molto importante conoscere la
risposta in frequenza del trasduttore nel caso di misure dinamiche: la banda passante del trasduttore deve
essere superiore a quella della grandezza fisica da misurare. La velocità di risposta è legata alla banda
passante. Nel caso di un trasduttore del secondo ordine, la sua frequenza di risonanza deve essere lontana
dalle frequenze da misurare.
• Ordine del sensore: dipende dalla funzione di trasferimento che meglio lo caratterizza: si possono avere
trasduttori schematizzati con FdT di ordine zero, uno o due.
Se il sistema non ha elementi di accumulo di energia esso è di ordine zero, il suo comportamento è costante al
variare della frequenza (la risposta in frequenza è infinita). Naturalmente questo è un modello semplificato,
utilizzato nei casi in cui la sua FdT presenti poli molto distanti (a frequenze più alte) rispetto a quelli del sistema.
Se esiste un elemento di accumulo, il sistema è di ordine uno, così come è di ordine due se esistono due elementi di
accumulo energetico.
Su alcune di queste caratteristiche statiche e dinamiche si ritornerà ad approfondire più avanti.
SENSORI ATTIVI E PASSIVI
Un sensore si considera passivo se l'energia necessaria per il suo funzionamento è prelevata interamente o per la
maggior parte dal sistema da misurare. Il tradizionale termometro a bulbo è un sensore passivo: il fluido contenuto
nel bulbo si scalda
Alimentazione
prelevando calore dal
da rete o batterie
mezzo di cui si vuole
conoscere la temperatura,
questo tipo di trasduttore
uscita
non può ovviamente
Sistema di condizionamento
Uscita
e di alimentazione del
essere usato per sistemi a
alimentazione
TRASDUTTORE
trasduttore
bassa capacità, dove la
perturbazione causata dal
Fig.6.5
bulbo causerebbe un
apprezzabile errore nella misura della temperatura del recipiente.
Un trasduttore, secondo la definizione data, è un sensore attivo: occorre fornire dall'esterno la maggior parte
dell'energia necessaria per il funzionamento dei suoi circuiti elettrici od elettronici. Questo tipo di strumento provoca
Automazione Navale 1 – G. Carrera – Capitolo 6 – rev.11/12/07
3
alterazioni del tutto trascurabili nel sistema da misurare e porta ad una precisione più elevata della misura. Per
contro, si ha una maggiore complessità dell'apparecchiatura con conseguente costo più elevato. L'energia, come si
vede in fig.6.5, viene fornita da batterie o da alimentatori collegati alla rete elettrica. Il sistema di condizionamento e
di alimentazione provvede a fornire al trasduttore la sua adeguata alimentazione, ad amplificare il segnale in uscita, a
convertire il segnale elettrico in tensione, a filtrarlo, etc.
STRUMENTI ANALOGICI E DIGITALI
È possibile introdurre una classificazione basata sulla natura del segnale osservando il tipo di informazione che esso
fornisce ossia se varia secondo un andamento continuo o discreto. I segnali che variano con continuità possono
idealmente assumere infiniti valori in un campo finito sono detti segnali analogici.
I segnali che, al contrario, variano secondo gradini discreti, possono assumere solo un certo numero di stati in un
campo finito e vengono detti segnali digitali.
In natura non esistono variabili fisiche che variano "a scatti", per cui i segnali digitali vengono generati da appositi
dispositivi di conversione o da sistemi a soglia, come si vedrà in seguito. L'uso di elementi digitali non è di impiego
esclusivo elettronico od elettrico, ma si estende anche alla pneumatica ed alla oleodinamica.
Poiché il trasduttore è quasi sempre di tipo analogico, occorre introdurre in una apparecchiatura digitale un elemento
di conversione analogico/digitale (A/D o ADC, acronimo di Analog to Digital Converter). Ad esempio, un voltmetro
digitale è un convertitore A/D collegato ad un display numerico. La sua precisione è in genere molto superiore a
quella di uno strumento galvanometrico (tipico lo 0,05% contro 1,5%) ed ormai ha un prezzo competitivo, anche se
richiede un alimentatore esterno (tipico strumento attivo).
STRUMENTI A DEFLESSIONE E AD AZZERAMENTO
Una classificazione utile è quella di dividere la strumentazione in base al modo di operare sullo strumento, cioè se
per fare la misura si deve effettuare un azzeramento o è sufficiente misurare uno scostamento rispetto ad un valore
iniziale.
Nel sistema ad azzeramento occorre intervenire sullo strumento in modo da
annullare l'effetto introdotto dalla variabile da misurare: l'esempio più classico è
la bilancia a bracci eguali o del tipo a stadera. Conoscendo con precisione i pesi
aggiunti per azzerare lo scostamento dell'ago rispetto alla posizione di riposo, si
può risalire al peso dell'oggetto da pesare. Con i levismi della stadera è possibile
ridurre il peso aggiunto secondo rapporti noti.
In un sistema a deflessione, alla grandezza fisica da misurare viene opposto un
effetto che in qualche modo è in relazione alla variazione della variabile. Un
esempio ne è la bilancia dinamometrica: una molla tarata si oppone alla forza
peso dell'oggetto, si ha come risultato uno spostamento proporzionale al peso. La
precisione ottenibile con gli strumenti ad azzeramento è notevolmente superiore a
quella degli strumenti a deflessione. Una ragione è che nel sistema a deflessione
(per esempio la molla) non è di per se uno standard di riferimento, ma deve essere
soggetta ad una taratura, peraltro con limiti di linearità che sono praticamente
nulli nel caso dello strumento ad azzeramento. Gli strumenti a deflessione hanno,
però, un comportamento più rapido rispetto a quelli ad azzeramento, che
richiedono un certo tempo per l'operazione di bilanciamento. Gli strumenti a
deflessione sono quindi più idonei per eseguire misure di tipo dinamico, cioè con
Fig.6.6
variabili da misurare che non rimangono costanti nel tempo. Per via della loro
tendenza a stararsi, occorre frequentemente calibrare lo strumento, effettuando la misura su valori noti con
sufficiente precisione.
ACCURATEZZA E PRECISIONE DI UNO STRUMENTO
La precisione di uno strumento è la sua capacità di riprodurre la stessa uscita per uno stesso ingresso. Uno strumento
preciso darà sempre lo stesso valore ogni volta che verrà usato, la misura è ripetibile ma può essere non corretta. La
precisione è anche rappresentata dal numero di cifre significative delle letture.
L’accuratezza di uno strumento è rappresentata dal minimo scarto tra il valore atteso ed il valore misurato. Uno
strumento accurato fornisce in uscita un valore molto vicino a quello atteso, ma potrebbe non dare sempre lo stesso
valore. La figura 6.7 mostra in grafico una serie di misure nei quattro casi:
1- preciso ed accurato
2- preciso ed inaccurato
3- impreciso ed accurato
4- impreciso ed inaccurato
Automazione Navale 1 – G. Carrera – Capitolo 6 – rev.11/12/07
4
Un metodo statistico molto usato per evidenziare la precisione di uno strumento è quello di effettuare una serie di
misure ad ingresso costante e di calcolare la deviazione
standard sulle letture: maggiore è la σ minore è la
precisione.
Calcolando la media delle stesse misure si può risalire alla
sua accuratezza: uno strumento accurato dovrebbe avere la
media molto vicina al valore atteso.
L’accuratezza di uno strumento è spesso data come
percentuale del fondo scala, per cui occorre lavorare con la
scala più piccola che possa ancora contenere il segnale da
misurare.
Per quanto riguarda gli strumenti digitali, poiché c’è
sempre l’incertezza della cifra meno significativa, questa
definisce la risoluzione dello strumento, essa è la più
piccola quantità che lo strumento può misurare. Va detto
che la risoluzione non è legata all’accuratezza ma alla
precisione: un termometro digitale può facilmente avere
una risoluzione di 1/10°C ma un’accuratezza di ±2°C.
Fig.6.7
Ogni cosa è soggetta ad incertezza e può essere sorgente di
errori. E’ molto importante, quando si esegue una misura,
sapere che essa può essere influenzata da molte cose. Trascurando l’errore umano, cosa che non dipende dallo
strumento di misura e su cui è difficile intervenire, si possono considerare quattro tipi di errore:
Zona di insensibilità
La zona di insensibilità è quell’intervallo nel quale la grandezza può variare senza provocare alcuna variazione
dell'uscita dello strumento. Questa si manifesta soprattutto negli strumenti meccanici ed è dovuta all'attrito ed ai
giuochi meccanici degli elementi dello strumento stesso. Ne risulta un ritardo iniziale dato che lo strumento inizierà
a funzionare solo dopo che il segnale è uscito dalla zona di insensibilità. Questo tempo è funzione dell'ampiezza
della zona di insensibilità e della velocità con cui il segnale cambia.
ERRORE DINAMICO
L’errore dinamico è una diretta conseguenza del ritardo dovuto alla risposta dello strumento ad una repentina
variazione del segnale di ingresso. La velocità di risposta è una caratteristica molto importante soprattutto per la
strumentazione che viene a fare parte di un sistema di regolazione. Ecco le caratteristiche al variare dell’ordine:
• Sistemi di ordine zero: risposta istantanea, nessun ritardo, banda infinita. Esempio: potenziometro.
• Sistemi di ordine uno: la risposta, il ritardo e la banda passante dipendono dalla costante di tempo τ.
Esempio: termometro a bulbo.
• Sistemi di ordine due: la risposta, il ritardo e la banda passante dipendono dal coefficiente di smorzamento
ξ e dalla pulsazione naturale ωn. Esempio bilancia dinamometria.
Le figure seguenti mostrano le risposte forzate ad un ingresso a gradino (step), alla rampa unitaria e la risposta in
Fig. 6.8 – Risposte di un sensore di ordine uno.
frequenza (diagrammi di Bode: modulo e fase) dei sistemi del primo e del secondo ordine.
Automazione Navale 1 – G. Carrera – Capitolo 6 – rev.11/12/07
5
Si noti che un sistema del secondo ordine presenta una sovra-elongazione e delle oscillazioni che vanno ridotte con
Fig. 6.9 – Risposte di un sensore di ordine due.
appositi sistemi di smorzamento.
LINEARITÀ DI UNO STRUMENTO
È possibile trovare diversi modi per specificare gli errori di non linearità di un sistema. L'errore può essere espresso
come percentuale riferita alla misura oppure al fondo scala dello strumento od ad una combinazione dei due. Uno
dei metodi più corretti sembra essere quello della linearità indipendente, che si può esprimere come:
linearità indipendente = + A% della lettura, oppure = +B% del fondo scala
a seconda di quello che è maggiore. La prima parte (+A%) della lettura rappresenta il desiderio di avere un errore di
non linearità costante percentualmente, mentre il secondo termine (+B%) rappresenta la impossibilità di fare misure
in prossimità dello zero: l'errore riferito percentualmente
alla misura tenderebbe ad una forma indeterminata con
deviazione tendente a zero per valori in ingresso che
tendono a zero, per cui si stabilisce una fascia di errore
riferito al fondo scala.
La curva mostrata in fig.6.10 rappresenta quanto espresso
nella relazione precedente. Si considera l'errore di tipo B%
per valori piccoli fino al punto in cui A%=B%, quindi si
tiene conto dell'errore tipo A%, riferito alla lettura. In altri
casi vengono definite diversamente le caratteristiche di
linearità di uno strumento: per esempio, molti costruttori di
celle di carico fanno riferimento ad una retta tracciata tra il
punto a carico nullo ed il punto di fondo scala e, prendendo
la deviazione massima dei punti sperimentali rispetto a
questa curva, calcolano l'errore come il rapporto tra la
massima deviazione ed il fondo scala.
Fig.6.10 - Metodo della linearità indipendente.
SENSIBILITÀ DI UNO STRUMENTO
Se la curva di ingresso/uscita di uno strumento è una retta, la sua
sensibilità è definita come la pendenza ∆U/∆I della retta. Se la sua
risposta non è lineare, la sensibilità non sarà costante per tutto il campo di
variabilità dell'ingresso e sarà data dalla funzione derivata della curva di
taratura, o rilevando la tangente dei punti più significativi, come indicato
in fig.6.11. Normalmente la sensibilità di uno strumento viene espressa
come rapporto delle grandezze fisiche di uscita e di ingresso.
Fig.6.11 - Sensibilità.
Automazione Navale 1 – G. Carrera – Capitolo 6 – rev.11/12/07
6
APPENDICE
VALORE MEDIO
Il valore medio Am di un segnale periodico a(t), ossia un segnale che si ripete con periodicità T, è definito come:
T
1
Am ≡ ∫ a (t ) ⋅ dt
T 0
Nel caso di una sinusoide di ampiezza A, operando un cambiamento di variabile, si ha:
T
Am =
1
1
a (t ) ⋅ dt =
∫
T 0
2 ⋅π
2π
∫ a(ω ⋅ t ) ⋅ d (ω ⋅ t ) =
0
1
2 ⋅π
2π
∫ A ⋅ sen(ω ⋅ t ) ⋅ d (ω ⋅ t ) =0
0
2π
infatti:
∫ sen( x )dx = − cos(2π ) + cos(0) = −1 + 1 = 0
0
Valore medio di una serie temporale
Considerando una serie temporale A1, A2,..,AN, costituita da N campionamenti eseguiti nel periodo T con intervallo di
campionamento ∆t, si ha che: T= N⋅∆t , quindi il valore medio sarà:
1
Am ≡
N
N
∑A
i
i =1
VALORE QUADRATICO MEDIO
Il valore quadratico medio (Root Mean Square: R.M.S.) di un segnale a(t ), periodico di periodo T, è definito come:
T
1 2
Ae ≡
a (t ) ⋅ dt
T ∫0
Nel caso di una sinusoide si ha:
T
1 2
1
Ae =
a (t ) ⋅ dt =
∫
T 0
2 ⋅π
2π
∫A
2
A
2
⋅ sen 2 (ω ⋅ t ) ⋅ d (ω ⋅ t ) =
0
infatti:
2π
2π
x − cos( x ) ⋅ sen( x )
=π
∫0 sen ( x ) =
2
0
2
In elettrotecnica ed in elettronica il valore quadratico medio si chiama valore efficace.
Valore quadratico medio di una serie temporale
Considerando una serie temporale costituita da N campionamenti, il valore quadratico medio è:
1
N
Ae ≡
N
∑A
2
i
i =1
Deviazione standard
E definita come il valore quadratico medio delle deviazioni rispetto al valore medio:
s≡
1
N
N
∑( A − A )
i
2
m
i =1
2
∑A
2
=
N
2
∑A
−
=
N
A2 m − Am
2
dove si è indicata con A m la media dei quadrati e con Am il quadrato della media.
Nel caso di media nulla, la deviazione standard coincide con il valore quadratico medio.
s≡
1
N
N
∑( A − A )
i
i =1
m
2
∑A
2
=
N
2
∑A
−
=
N
2
A2 m − Am
dove si è indicata con A m la media dei quadrati e con Am2 il quadrato della media.
Nel caso di media nulla, la deviazione standard coincide con il valore quadratico medio.
Automazione Navale 1 – G. Carrera – Capitolo 6 – rev.11/12/07
7
2
2
IL METODO DEI MINIMI QUADRATI
Il metodo dei minimi quadrati permette di ricavare la retta, come si vede in fig.6.5, che minimizzi lo scarto
quadratico dai punti sperimentali, quindi permette di ricavare in forma analitica la dipendenza dell'uscita
(variabile dipendente) dello strumento con il suo ingresso (variabile indipendente), anziché ricorrere ad una
forma tabellare. Naturalmente la retta si discosterà notevolmente dalla curva dei dati sperimentali se lo strumento
non avrà un comportamento lineare, è comunque possibile verificare la linearità valutando la dispersione dei dati.
Si supponga di aver rilevato una serie di misure corrispondente alle coppie di punti: (x1,y1),(x2,y2)...(xn,yn).
Esisterà una retta, detta dei minimi quadrati, che minimizzerà i quadrati degli scarti da questa retta ai punti
sperimentali. Essa avrà l’equazione generica:
y = a⋅x + b
per quanto detto occorrerà' minimizzare la somma dei quadrati:
n
S = ∑ [ yi − ( a ⋅ xi + b)]
2
i=1
per far questo basterà porre a zero le sue derivate rispetto ad a e b, dopo alcuni passaggi si ottiene:
n ⋅ b + a ∑ xi = ∑ yi
b∑ xi + a ∑ xi2 = ∑ xi ⋅ yi
risolvendo il sistema delle due equazioni si ricavano la pendenza della retta:
a=
n ∑ xi ⋅ y i −
(∑ x )(∑ y )
n∑ x − ( ∑ x )
i
i
2
2
i
i
e l’intercetta:
(∑ y )(∑ x ) − (∑ x ⋅ y )( x )
b=
n∑ x − ( ∑ x )
i
2
i
i
i
i
2
2
i
i
Il metodo dei minimi quadrati non è solo limitato alla retta, ma si può estendere a curve polinomiali o altre
funzioni analitiche.
Riferimenti bibliografici della parte riguardante i sistemi di misura:
1)
2)
3)
4)
"Strumenti e metodi di misura", Ernest O.Doebelin, McGraw-Hill, 2001.
"Measurement Systems: Application an Design", Ernest O.Doebelin, McGraw-Hill 1966.
"Experimental Methods for Engineers", J.P.Holman, McGraw-Hill 1971.
"Criteria for the Selection of Acquisition Systems for Measurements on Board of Ships", G.Carrera,
WEGEMT Association 23rd School 'Full Scale Surveys of the Performance of Ships and Platforms', Genoa,
September 22-26 1997.
Automazione Navale 1 – G. Carrera – Capitolo 6 – rev.11/12/07
8