Capitolo 9
LA STATICA DEI SOLIDI
9.1
Introduzione.
Nel Cap. 8 siamo pervenuti a due equazioni che costituiscono il cardine intorno cui ruota tutta la
dinamica dei sistemi e cioè le equazioni cardinali della dinamica che qui riscriviamo:
PN
i=1
PN
i=1
F~i = M ~a
(9.1)
τ~i = I α
~
Vogliamo qui trattare un caso particolare, in cui siano nulle sia l’accelerazione lineare che quella
angolare. In tal caso abbiamo che il sistema si può muovere solo di moto rettilineo uniforme.
Scegliamo allora un riferimento tale che all’istante t = 0 il sistema sia fermo. Data la costanza del
moto avremo quindi che il sistema risulterà sempre fermo. Trattiamo cioè il caso della statica. In tal
caso le equazioni precedenti si trasformano nelle
PN
i=1
PN
i=1
F~i = 0
Equazionicardinalidellastatica
(9.2)
τ~i = 0
Il problema fondamentale della statica consiste allora nel determinare le condizioni grazie alle quali
un sistema rimane nel suo stato.
In generale un sistema ha, come abbiamo visto nel Cap. 8, un determinato numero di moti
possibili. Alcuni di questi però vengono impediti da azioni esterne, detti vincoli. Il numero residuo
di moti ancora possibili è appunto il numero di gradi di libertà del sistema. Il problema della statica
consiste allora nel determinare quali sono i vincoli, e quali azioni devono esercitare, in grado di rendere
stabile un sistema.
In termini energetici possiamo dire che ad ogni stato del sistema corrisponde un determinato
valore dell’energia. Poichè stiamo parlando di corpi in quiete è ovvio che tale energia è puramente
potenziale. D’altra parte sappiamo che la derivata rispetto alla posizione, o meglio il gradiente,
dell’energia potenziale è la forza risultante applicata al sistema. Ne consegue che il corpo sarà in
condizioni statiche, ovvero la forza applicata sarà nulla, se e solo se sarà nulla la derivata dell’energia
rispetto alla posizione.
Possiamo quindi enunciare un principio, valido sia in statica che in dinamica, secondo il quale lo
stato del sistema sarà tale che il gradiente dell’energia è nullo.
Dall’analisi matematica sappiamo che affinchè la derivata di una funzione sia nulla deve essere
orizzontale la tangente geometrica alla curva rappresentante la funzione stessa. Ne consegue che tre
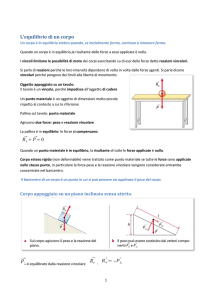
sono i possibili casi di equilibrio:
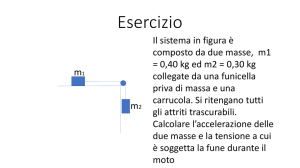
1. Equilibrio stabile: se l’energia assume un valore minimo. In tal caso un piccolo spostamento
intorno al punto di equilibrio non produce alcun effetto poichè il corpo ritorna alla condizione
di equilibrio iniziale (punto 1 della Fig 9.1).
199
200
CAPITOLO 9. LA STATICA DEI SOLIDI
3
2
1
Figura 9.1: I tre casi di equilibrio: stabile, indifferente ed instabile
2. Equilibrio indifferente: se l’energia assume un valore costante nell’intorno del punto (si ha nel
caso di un flesso orizzontale della curva). In questo caso un leggero spostamento dal punto di
equilibrio porta il sistema in un nuovo punto di equilibrio (punto 2 della Fig 9.1).
3. Equilibrio instabile: se l’energia assume un valore massimo. In tal caso un piccolo spostamento
intorno al punto di equilibrio non produce una situazione di equilibrio ma porta ad una trasformazione che cessa in un nuovo stato di equilibrio, diverso dal precedente (punto 3 della Fig
9.1).
Nel seguito tratteremo casi di equilibrio statico per corpi soggetti a forze dovute ad agenti diversi
ma occorre tener presente che spesso le forze applicate al corpo possono essere divise in due: le forze
peso e le reazioni vincolari. Possiamo allora determinare il punto di applicazione della risultante delle
forze peso e quello della risultante delle reazioni vincolari. E’ allora possibile mostrare che la condizione
d’equilibrio stabile è che il punto di applicazione delle reazioni vincolari sia al di sopra di quello delle
forze peso. Nel caso di coincidenza dei due punti si ha l’equilibrio indifferente mentre quello instabile
si ha se il punto di applicazione delle forze peso è situato al di sopra di quello delle reazioni vincolari.
Conclusa questa enunciazione generale di principi relativi alla statica dei sistemi passiamo ora a
trattare i problemi fondamentali della statica, tenendo presente che ci limiteremo ad un breve cenno
dei casi principali perchè un loro approfondito studio è argomento specifico di altri corsi di carattere
universitario (ad esempio Scienza delle Costruzioni per quel che riguarda la statica delle costruzioni).
9.2
La risultante delle forze applicate.
Poichè le equazioni cardinali della statica impongono non solo l’annullarsi delle forze applicate ma
anche quello dei momenti di tali forze occorre determinare, dato un sistema di forze, la risultante di
queste e dei loro momenti.
E’ possibile mostrare, ma qui tralasciamo la dimostrazione, che se un sistema di forze ha risultante
nulla allora la risultante dei momenti delle forze è indipendente dal polo scelto. Poichè in statica siamo
interessati a sistemi di forze con risultante nulla, utilizzeremo sempre, per calcolare i momenti delle
forze, un polo specifico e riterremo validi i risultati in relazione a qualsiasi polo.
Dividendo le forze agenti su un sistema in forze attive e reazioni vincolari possiamo analizzare
separatamente i due tipi di forze determinando separatamente le due risultanti delle forze e le due
risultanti dei momenti delle forze.
Questa ripartizione risulta comoda poichè i problemi di statica possono ripartirsi in due casi:
1. Sono note le forze attive e si devono determinare le reazioni vincolari.
9.2. LA RISULTANTE DELLE FORZE APPLICATE.
201
O
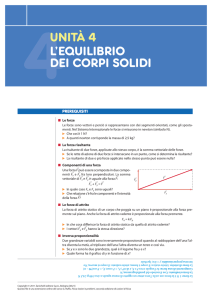
Figura 9.2: Individuazione della retta d’azione del vettore somma di due vettori obliqui
2. Sono noti i vincoli ed occorre determinare quali sono le possibili forze attive equilibrabili dai
vincoli.
Consideriamo quindi un primo caso particolarmente semplice. Siano cioè date due forze F~1 ed F~2
agenti lungo due diverse rette d’azione. La risultante di queste due forze avrà un modulo che può
facilmente calcolarsi graficamente col metodo del parallelogramma.
Tale metodo, però, non permette di determinare il punto di applicazione di tale risultante, o meglio
la retta di azione della risultante.
Per poter determinare tale retta conviene allora modificare la definizione della regola del parallelogramma e calcolare la risultante prolungando le due rette d’azione delle forze sinchè esse non si
intersecano. Successivamente si traslano le forze lungo le loro rette di azione sinchè esse non abbiano
un punto in comune ed a partire da questa posizione si genera il parallelogramma, come mostrato in
Fig. 9.2. La risultante cosı̀ ottenuta appartiene ad una retta di azione che è proprio quella cercata.
Per dimostrare che ciò è vero basta calcolare il momento delle due forze applicate rispetto al punto
O, di intersezione delle rette d’azione. Si osserva che sono nulli entrambi i momenti delle due forze e
quindi è nullo anche il momento risultante. Ne consegue che la forza risultante deve avere anch’essa
un momento nullo e quindi deve anch’essa passare per il punto O.
Ovvia è l’estensione al caso in cui le forze agenti siano più di due. In tal caso basta sommare
le forze due alla volta per ottenere la risultante totale. Esistono, però, anche altri metodi capaci di
trattare questo tipo di problema in maniera più rapida (ad esempio il metodo del poligono funicolare)
ma in ogni caso la logica rimane la stessa.
Più complessa è la situazione nel caso in cui le forze applicate siano parallele tra loro. In tal caso
infatti, comunque si prolunghino le rette d’azione, non si avrà mai un punto di intersezione e non si
potrà quindi applicare il metodo precedentemente descritto.
Per risolvere questo problema graficamente dobbiamo adoperare una regola dell’algebra: se ad un
membro di un’equazione si somma e si sottrae un stesso termine, l’equazione non cambia.
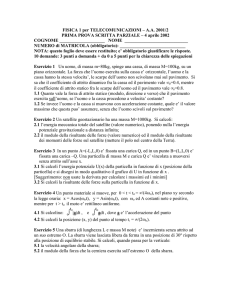
Pertanto date due forze F~1 ed F~2 , parallele tra di loro, onde calcolare la forza F~ , somma delle due,
occorre sommare e sottrarre una forza vecf qualsiasi.
Consideriamo quindi la retta
congiunge i punti di applicazione delle due forze e consideriamo
che
~
una forza di modulo generico, f . Sommando la forza F~1 e la forza F~2 con le forze + f~ e − f~ si
ottengono le due forze G~1 ed G~2 rispettivamente, come mostrato in Fig. 9.3.
Queste due forze non sono più parallele tra di loro e pertanto possono essere sommate con la regola
adoperata precedentemente, ottenendo cosı̀ la soluzione cercata.
A questo metodo geometrico può essere unito anche un metodo analitico che chiarisce maggiormente il concetto: quel che si sta cercando è una forza che possa sostituire il sistema di forze originario
sia come risultante delle forze che come risultante dei momenti.
202
CAPITOLO 9. LA STATICA DEI SOLIDI
f
G1
F1
FT
-f
F2
G2
Figura 9.3: Metodo per la somma di due vettori paralleli
F1
d1
d
FT
d2
F2
Figura 9.4: Calcolo della risultante di due vettori paralelli con la tecnica analitica
Date due forze F~1 ed F~2 , parallele tra di loro, spostiamole lungo le loro rette di azione sinchè la
retta che unisce i loro punti di applicazione non sia perpendicolare alle rette di applicazione delle forze
stesse. Indichiamo con d la distanza tra queste due rette d’azione.
Considerando una retta qualsiasi, indichiamo con d 1 la sua distanza dalla forza F~1 e con d2 la sua
distanza dalla forza F~2 ed applichiamo le due relazioni:
~T = F
~ 1 + F~2
F
(9.3)
τ~T = τ~1 + τ~2
Calcoliamo ora i momenti delle forze rispetto ad un polo generico, ad esempio rispetto al punto di
applicazione della seconda forza. Scrivendo soltanto i moduli otteniamo
FT = F 1 + F 2
(9.4)
FT d2 = F 1 d
ovvero
d2 = d
F1
F1 + F 2
(9.5)
d1 = d
F2
F1 + F 2
(9.6)
Ricavando l’altra distanza si ottiene:
203
9.3. I DIVERSI TIPI DI VINCOLI.
Possiamo quindi dire che la retta d’azione della risultante si trova ad una distanza dalle rette
d’azione delle forze originarie che è inversamente proporzionale alle intensità delle forze stesse:
d1
F2
=
d2
F1
(9.7)
E’ da notare che se le due forze sono equiverse la loro risultante sarà situata nella zona interna tra
le due forze mentre se queste hanno verso discorde la risultante si troverà all’esterno, dal lato della
forza più grande.
9.3
I diversi tipi di vincoli.
I vincoli esistenti in natura sono di tipo diverso ma essi possono essere considerati come appartenenti
ad alcuni gruppi principali, ognuno dei quali può esplicare una particolare azione.
Indichiamo qui i diversi tipi di vincoli, con l’azione da essi esplicabile.
1. Appoggio semplice: E’ in grado di esercitare una forza diretta verso la superfice, perpendicolarmente a questa. Permette movimenti laterali e lungo la direzione di allontamento dall’appoggio.
2. Incastro semplice: E’ in grado di esercitare una forza diretta perpendicolarmente alla superfice,
in entrambe le direzioni. Permette solo movimenti laterali.
3. Cerniera: Esercita una forza in qualunque direzione. Impedisce qualsiasi moto traslatorio e
permette solo moti rotatori intorno a se stessa.
4. Incastro multiplo: Blocca completamente il sistema esercitando una forza ed un momento in
qualunque direzione. Non permette alcun movimento, nè traslatorio nè rotatorio.
9.4
Le macchine semplici.
Un qualunque dispositivo in grado di porre in equilibrio più forze aventi origine e natura differenti tra
di loro viene detto, in fisica, macchina.
Schematicamente si può dire che su una macchina agiscono due risultanti delle forze; una di queste
è detta forza motrice e l’altra forza resistente. Il rapporto tra le due forze viene indicato come
guadagno V della macchina.
Una macchina verrà detta vantaggiosa se il suo guadagno è maggiore di 1, ovvero se permette di
equilibrare una forza con una forza inferiore, mentre sarà svantaggiosa se il guadagno è minore di 1
poichè necessita, per l’equilibrio, di una forza motrice superiore alla forza resistente.
Le macchine in genere sono dispositivi abbastanza complessi ma essi possono essere schematizzati
come un insieme di dispositivi più semplici, detti macchine semplici, che qui di seguito andremo ad
analizzare.
9.4.1
Piano inclinato.
Il piano inclinato è semplicemente costituito da una superfice piana inclinata di un certo angolo rispetto
all’orizzontale. Il suo scopo è quello di permettere l’innalzamento di un corpo avente un peso P , grazie
all’applicazione di una forza inferiore.
Consideriamo pertanto una superfice piana, inclinata di un angolo θ rispetto all’orizzontale. Su di
esso poniamo un corpo di peso P . Scomponiamo ora la forza peso in due componenti, l’una parallela
e l’altra perpendicolare al piano stesso, come mostrato in Fig. 9.5.
La componente perpendicolare sarà completamente equilibrata dalla reazione vincolare del piano
e quindi la risultante delle forze è la sola componente parallela, data da:
Fp = P sin θ .
(9.8)
204
CAPITOLO 9. LA STATICA DEI SOLIDI
Fp
P
q
Figura 9.5: Il piano inclinato
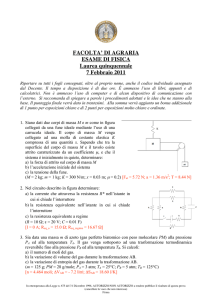
Potenza
Resistenza
Potenza
Fulcro
Leva di 1° genere
Potenza Resistenza
Resistenza
Fulcro Fulcro
Leva di 2° genere
Leva di 3° genere
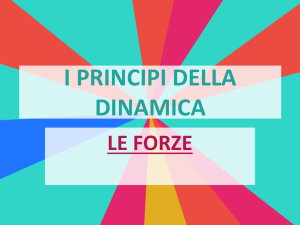
Figura 9.6: I tre tipi di leve
Per equilibrare questa forza occorre quindi applicare una forza di pari valore ed il guadagno della
macchina sarà:
1
P
=
.
(9.9)
V =
P sin θ
sin θ
Ne consegue che la macchina piano inclinato è una macchina vantaggiosa, con un vantaggio
crescente al diminuire dell’angolo di inclinazione.
E’ da notare che il piano inclinato permette di ridurre l’intensità della forza ma non diminuisce
il lavoro necessario ad innalzare il corpo. In assenza di attrito infatti esso dipende in ogni caso dalla
variazione di quota del corpo, mentre in presenza di attrito esso sarà dato dalla variazione di energia
potenziale sommata al lavoro dissipato dalle forze di attrito.
Un altro esempio di applicazione del piano inclinato è costituita dalla vite la quale non rappresenta
altro che un piano inclinato, avvolto elicoidalmente su un cilindro. In tal caso il vantaggio è determinato
dall’angolo di inclinazione, od anche come più propriamente si dice per le viti, dal passo cioè dalla
distanza tra due filetti adiacenti.
9.4.2
Leva.
Per leva si intende un qualunque sistema rigido di forma allungata in grado di eseguire rotazioni
intorno ad un suo punto.
In una leva si distinguono tre distinti punti e cioè il fulcro, punto intorno al quale il sistema è in
grado di ruotare, il punto di resistenza, laddove è applicata la resistenza, ed il punto di potenza,
laddove è applicata la forza motrice. A seconda della reciproca posizione di questi tre punti abbiamo
1. la leva di primo genere, se il fulcro è intermedio,
205
9.4. LE MACCHINE SEMPLICI.
Punto
fisso
Potenza
Resistenza
q
Figura 9.7: Carrucola mobile: Un estremo della fune è tenuto fisso mentre all’altro è applicata la
potenza. La resistenza è collegata alla carrucola
2. la leva di secondo genere, se il fulcro è esterno dal lato della resistenza, ed infine
3. la leva di terzo genere, se il fulcro è esterno dal lato della forza motrice.
La leva di secondo genere è sempre vantaggiosa mentre la leva di terzo genere è sempre svantaggiosa.
Quella di primo genere invece può essere vantaggiosa o svantaggiosa a seconda che il fulcro sia più
vicino alla resistenza o alla forza motrice.
9.4.3
Carrucola fissa.
La carrucola fissa non è altro che una ruota il cui asse di rotazione è tenuto fisso attraverso una
staffa. Sul bordo della ruota è presente una scanalatura nella quale scorre una fune ai cui estremi sono
applicati la forza motrice da un lato e la resistenza dall’altro. Il suo guadagno è sempre pari ad 1 ed
il suo scopo è semplicemente quello di variare la direzione di applicazione della forza.
9.4.4
Carrucola mobile.
In questo caso l’asse di rotazione della carrucola non è più tenuto fermo ma è libero di muoversi; viene
invece tenuto fisso un estremo della fune che passa attraverso la carrucola. All’altro estremo viene
applicata la forza motrice mentre la resistenza è applicata sull’asse della carrucola.
Dal bilancio delle forze e dei momenti si osserva che la forza motrice e la reazione vincolare nel
punto di fissaggio sono uguali mentre il vantaggio è dato da:
V = 2 cos
θ
2
(9.10)
e quindi al massimo, quando i due rami della fune sono paralleli, vale 2.
Sfruttando più carrucole mobili viene a costruirsi il bilancino, il cui guadagno è pari al doppio del
numero di carrucole mobili.
In generale possiamo dire che un insieme di carrucole fisse e mobili avrà un guadagno pari sempre
al doppio del numero di carrucole mobili.
9.4.5
Verricello.
E’ costituito da un cilindro intorno al quale è avvolta una fune. All’estremo libero della fune viene
applicata la resistenza mentre la forza motrice viene applicata su una sbarra solidale col cilindro.
206
CAPITOLO 9. LA STATICA DEI SOLIDI
Resistenza
d
R
Potenza
Figura 9.8: Il verricello
Detto R il raggio del cilindro e d la distanza tra asse del cilindro e punto di applicazione della forza
motrice, il guadagno del verricello è dato da:
V =
d
R
(9.11)
e quindi può essere maggiore o minore di 1, a seconda dei parametri costruttivi del verricello.
9.4.6
Ruote dentate.
Per la trasmissione di momenti motori sorge spesso il problema di trasferire la potenza da un asse ad
un altro, variando la velocità di rotazione. In tal caso si potrebbe far uso delle ruote di frizione ovvero
di due ruote che vengono poste a stretto contatto: la rotazione di una delle due ruote provoca, per
attrito, il moto dell’altra. Il vantaggio in tal caso è dato semplicemente dal rapporto tra i raggi delle
due ruote. Questo sistema di trasmissione ha però molti difetti tra i quali il principale è lo slittamento
che può verificarsi tra le due ruote.
Per risolvere questo problema si fa uso delle ruote dentate ovvero di ruote di frizione sulla superfice
circolare delle quali siano state prodotte delle scanalature, dette denti in modo che ogni dente di
una ruota vada ad incastrarsi nella scanalatura tra due denti dell’altra ruota. In tal moto si ha la
trasmissione del momento motore senza alcuna possibilità di slittamento. Il vantaggio è in questo caso
dato dal rapporto tra i numeri di denti delle due ruote.
Un altro sistema di trasmissione dei momenti motori, molto adoperato nella pratica, è quello
basato sulle cinghie di trasmissione. Abbiamo cioè due carrucole fisse collegate attraverso una cinghia
di trasmissione in modo che la rotazione di una carrucola faccia ruotare (nella stessa direzione) l’altra
ruota. Anche qui il vantaggio è dato dal rapporto tra i raggi delle due ruote ed anche qui si ha il
problema del possibile slittamento.
207
9.5. ESERCIZI
b
120°
90°
c
a
150°
Figura 9.9: Tre forze sono applicate ad un corpo
9.5
ESERCIZI
Esercizio 9.1 : Determinare la risultante del sistema di forze costituito da F~1 = (1, 2), applicata
nel punto P1 = (1, 1) , e da F~2 = (3, 6), applicata nel punto P2 = (2, 3).
Esercizio 9.2 :
Un asse è fissato con una cerniera posta a 3 m dal suo baricentro. Se la massa
della sbarra è di 1 kg si determini dove deve essere applicata una forza di 30 N per poter bilanciare il
sistema.
Esercizio 9.3 :
Determinare le reazioni vincolari esercitate da due appoggi che sostengono una
sbarra di massa m = 2 kg, se essi sono posti in posizioni simmetriche, a d = 1 m dal baricentro della
sbarra.
Esercizio 9.4 :
Una scala è poggiata sul suolo e sul muro. Supponendo che non vi sia attrito
sul muro ma che il coefficiente di attrito statico tra suolo e scala sia µ = 0.2, si determini quale deve
essere l’inclinazione massima della scala per la quale si ha ancora equilibrio.
Esercizio 9.5 : Un cubo di massa m = 3 kg è poggiato su uno spigolo ed è tenuto fermo da una
forza F . Si determini il valore di tale forza.
Esercizio 9.6 :
Un corpo di massa m = 6 kg è poggiato su un piano inclinato di un angolo
θ = 45◦ rispetto all’orizzontale. Si determini il valore della forza da applicare tangenzialmente al
piano, necessaria a mantenere in equilibrio il sistema sia nel caso in cui non vi sia attrito che nel caso
in cui l’attrito statico tra piano e corpo sia µ = 0.3.
Esercizio 9.7 : Se per schiacciare una noce occorre superare il carico di rottura del gusci, che vale
R = 800 N, si determini quale forza occorre applicare su uno schiaccianoci in cui il fulcro sia a p = 10
cm dal punto di applicazione della potenza ed a r = 3 cm da quello della resistenza.
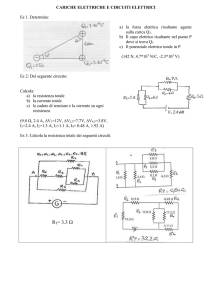
Esercizio 9.8 : Su un corpo sono applicate le tre forze ~a, ~b e ~c, come indicato in Fig. 9.9. Calcolare
la forza F~ da applicare al corpo per ottenere l’equilibrio statico, nell’ipotesi che sia |~a| = 5 N , ~b = 12
N e |~c| = 6 N.
208
CAPITOLO 9. LA STATICA DEI SOLIDI
F2
F1
Figura 9.10: Due forze applicate ad un corpo
Esercizio 9.9 :
Su un punto materiale agiscono le forze F~1 ed F~2 , come indicato in Fig. 9.10.
Determinare la forza F~ da applicare al punto affinchè esso sia in equilibrio, nell’ipotesi che sia F~1 =
2.94 N ed F~2 = 1.70 N.
Esercizio 9.10 : Un corpo di massa m = 2 kg è sospeso tramite due fili di uguale lunghezza, che
formano un angolo α = 30◦ con l’orizzontale. Si determinino la tensione del filo ed il valore minimo
dell’angolo α per il quale i fili si spezzano, se il loro carico di rottura è R = 200 N.
Esercizio 9.11 : Una trave di materiale omogeneo, con una massa M = 400 kg ed una lunghezza
L = 3 m, è appoggiata su due ritti. Uno di essi dista l 1 = 0.2 m dall’estremo della sbarra mentre
l’altro dista, sempre dallo stesso estremo, l 2 = 2.5 m. Determinare quali sono le reazioni vincolari
nei ritti. Si determini ancora dove deve essere posto un corpo la cui massa è m = 50 kg, affinchè le
reazioni vincolari siano uguali tra loro.
Esercizio 9.12 :
Un punto P , di massa m = 2 kg, poggia su una superfice orizzontale ed è
collegato ad un punto O del piano, mediante una molla di costante elastica k = 1.2 N/m che lo attrae
verso il punto O. Si determini la posizione di equilibrio del punto P se il coefficiente di attrito statico
tra piano e corpo è µ = 0.3.
Esercizio 9.13 : Una massa M = 4 kg è sospesa ad un filo. L’altra estremità del filo è fissata al
soffitto. A metà altezza di questo filo è fissata un’estremità di un altro filo che, dopo essere passato
attraverso una carrucola priva di massa e di attrito, è collegato ad una massa m = 1 kg, come mostrato
in Fig. 9.11. Il sistema si pone in equilibrio per un particolare valore dell’angolo θ. Si determini il
valore di tale angolo.
Esercizio 9.14 :
Un corpo di forma sferica, avente massa m = 2 kg e raggio R = 10 cm, è
sospeso ad una corda di lunghezza L = 50 cm ed appoggiata alla parete, come indicato in Fig. 9.12.
Si determini la tensione della fune e la reazione vincolare della parete nel punto di appoggio tra corpo
e parete.
Esercizio 9.15 : Tra due pali, distanti l = 20 m, viene sospeso un cavo avente un carico di rottura
pari ad R = 200 N. Si determini quale deve essere la lunghezza minima del cavo se al centro di esso
209
9.5. ESERCIZI
q
Figura 9.11: Un corpo sospeso ad una fune, tirata lateralmente da un altro corpo
Figura 9.12: Sfera appoggiata ad una parete e tenuta da una corda
vogliamo sospendere un lampione la cui massa è m = 16 kg.
Esercizio 9.16 :
Un cilindro di raggio r = 6 cm, è coassiale ad una puleggia di raggio R = 30
cm. Intorno alla puleggia scorre senza scivolare una corda cui è applicata una forza F = 200 N. Si
determini qual’è il peso che è possibile sostenere in tali condizioni all’estremo libero di una corda
avvolta intorno al cilindro.
Esercizio 9.17 : Un sistema di biella e manovella è costituito da una ruota su cui è imperniata,
a distanza r = 30 cm dal centro, una manovella che permette di trasformare il moto rotatorio della
ruota in un moto traslatorio alternativo e viceversa. Determinare quale coppia motrice viene trasferita
alla ruota se sulla manovella è agente una potenza W = 600 W, nell’istante in cui la velocità della
manovella è v = 36 m/s.
Esercizio 9.18 : Una sbarra, priva di massa ed avente lunghezza L = 10 cm, è imperniata in un
estremo. All’altro estremo è applicata una forza F = 0.03, come indicato in Fig. 9.13. A distanza
l = 6 cm dal perno è fissata una molla la cui costante elastica è k = 3.33 N/m. Si determini l’angolo
θ di cui è deflessa la sbarra, rispetto all’orizzontale.
Esercizio 9.19 : Una sbarra è imperniata in un punto. All’altro estremo è fissato un filo, collegato
poi alla parete. Si determinino le reazioni vincolari e la tensione del filo nell’ipotesi che la massa della
sbarra sia m = 3 kg , la sua lunghezza sia L = 0.4 m ed infine che la sbarra sia orizzontale mentre il
210
CAPITOLO 9. LA STATICA DEI SOLIDI
Figura 9.13: Una sbarra imperniata in un estremo è spinta da una forza e trattenuta da una molla
Figura 9.14: Due corpi sono poggiati su un piano inclinato
filo formi un angolo θ = 30◦ rispetto alla verticale.
Esercizio 9.20 :
Un corpo di massa M = 4 kg, è poggiato su un piano inclinato. Sopra di esso
è poggiato un altro corpo, di massa m = 1 kg. Tale corpo è fissato tramite un filo in modo che non
possa scivolare verso il basso, come mostrato in Fig. 9.14.
Si determini l’angolo massimo di inclinazione del piano affinchè non si abbia alcun movimento
del corpo inferiore, se tra i due corpi non vi à attrito mentre tra piano e corpo inferiore esiste un
coefficiente di attrito statico pari a µ = 0.2.
211
9.6. SOLUZIONI
9.6
SOLUZIONI
Svolgimento dell’esercizio 9.1 :
Eseguiamo questa somma per ogni singola componente, tenendo conto che il punto di applicazione si
deve trovare sulla retta che congiunge i due punti di applicazione.
Per la componente lungo l’asse x abbiamo:
X =1+3=4
e la retta di azione ha ascissa:
x=1+1
3
1
= 2 − 1 = 1.75
4
4
Per la componente lungo l’asse y abbiamo:
Y =2+6 =8
con retta di azione con ordinata:
y =1+2
6
2
= 3 − 2 = 2.5
8
8
e quindi la risultante è R = (4, 8) con punto di applicazione in P = (1.75, 2.5).
Svolgimento dell’esercizio 9.2 :
Detta D la distanza cercata è ovvio che essa si deve trovare dall’altra parte del baricentro, rispetto
alla cerniera.
La cerniera esercita una forza che permette il bilanciamento delle forze ma non quello dei momenti.
Calcolando pertanto i momenti rispetto al punto di incernieramento ottenia-mo:
F D=mg L
ove F è la forza da applicare, m la massa del corpo ed L la distanza tra baricentro e cerniera.
Ne consegue che:
L
D=mg
= 1m
F
Svolgimento dell’esercizio 9.3 :
Essendo tutte le forze verticali si possono scrivere le equazioni di bilanciamento delle forze nelle sole
intensità. Indicando con F1 ed F2 le due reazioni vincolari abbiamo che, per il bilanciamento delle
forze:
F1 + F 2 = m g
mentre per il bilanciamento dei momenti rispetto al baricentro deve anche essere:
F1 d = F 2 d
ovvero
F1 = F 2 =
1
mg
2
Svolgimento dell’esercizio 9.4 :
Indichiamo con θ l’angolo che la scala forma con la verticale.
212
CAPITOLO 9. LA STATICA DEI SOLIDI
R
q
N
mg
Fa
Figura 9.15: Scala appoggiata su una parete
Le forze applicate sulla scala sono la forza peso, applicata nel baricentro, le reazioni vincolari al
suolo ed alla parte, applicate nei rispettivi punti di appoggio, e l’attrito statico al suolo, come mostrato
in Fig. 9.15.
Indichiamo ora con R la reazione vincolare sulla parete, con N quella al suolo,con F a la forza
d’attrito al suolo, con m la massa della sbarra e con l la lunghezza della stessa.
Per l’equilibrio delle forze deve allora risultare:
R=
Fa = µ N
N= mg
ovvero:
R=µmg
Per l’equilibrio dei momenti delle forze, rispetto al punto di appoggio al suolo abbiamo:
mgl
sin θ = R l cos θ
2
e quindi:
mgl
sin θ = µ m g l cos θ
2
che, semplificata, porta a
ovvero
sin θ
= µ cos θ
2
sin θ
=2µ
cos θ
e pertanto
θ = arctan (2 µ) = arctan (0.4) = 0.38 = 21.8◦
Svolgimento dell’esercizio 9.5 :
Sul corpo sono applicate la forza peso, la forza F e la reazione vincolare. Per determinare il valore
della forza F occorre equilibrare i momenti delle forze, rispetto al punto di appoggio. Pertanto, detto
L la lunghezza dello spigolo del cubo, risulterà:
F L=
e quindi
F =
mgL
2
mg
= 15N
2
213
9.6. SOLUZIONI
Svolgimento dell’esercizio 9.6 :
Le forze agenti sul corpo sono la forza peso, verticale, la reazione vincolare del piano, perpendicolare
a questo, la forza d’attrito, tangente, e la forza F esterna.
Detta F a l’eventuale forza di attrito, essa sarà:
Fa ≤ µ m g cos θ
cui si opporrà la componente tangenziale della forza peso:
P = m g sin θ
La reazione vincolare del piano sarà pari alla componente perpendicolare della forza peso:
N = m g cos θ
Per l’equilibrio del corpo la forza esterna dovrà essere non tanto piccola, da bilanciare la componente tangenziale della forza peso cui si sarà sottratta la forza di attrito, e quindi tale da non far
cadere verso il basso il corpo. D’altra parte essa non dovrà essere tanto grande da superare la somma
della componente tangenziale della forza peso e della forza di attrito, in modo da non far muovere
verso l’alto il corpo. Per la prima condizione avremo allora:
F = m g sin θ − Fa = m g (sin θ − µ cos θ)
mentre per la seconda condizione deve risultare:
F = m g sin θ − Fa ≤ m g (sin θ + µ cos θ)
Nel caso di assenza di attrito le due condizioni si riducono a:
F = m g sin θ = 42.4N
mentre in presenza di attrito abbiamo:
m g (sin θ − µ cos θ) ≤ F ≤ mg(sin + µcos )
ovvero:
29.7N ≤ F ≤ 55.1N
Svolgimento dell’esercizio 9.7 :
Per l’equilibrio dei momenti, detta F la forza da applicare, deve risultare:
F p=Rr
ovvero:
F =R
r
= 240N
p
Svolgimento dell’esercizio 9.8 :
Per ottenere l’equilibrio deve essere:
F~ + ~a + ~b + ~c = 0
214
CAPITOLO 9. LA STATICA DEI SOLIDI
b
c
a
Figura 9.16: Tre forze applicate ad un corpo
e quindi:
F~ = − ~a + ~b + ~c
Determiniamo pertanto la risultante delle tre forze. A tale scopo consideriamo un riferimento xy
tale che l’asse x coincida con la direzione ed il verso della forza ~c, mentre l’asse y coincida con la
direzione ed il verso della forza ~b, come indicato in Fig. 9.16
Le componenti dei tre vettori saranno:
~a = (|~a| sin 210◦ , |~a| cos 210◦ ) = (−2.5 , −4.33)
~b =
0 , ~b
= (0 , 12)
~c = (|~c| , 0)
= (6 , 0)
e quindi la risultante sarà:
~ = ~a + ~b + ~c = (3.50 , 7.67)
R
ovvero:
~ = (−3.50 , −7.67)
F~ = −R
In particolare sarà:
~
F = 8.43N
Svolgimento dell’esercizio 9.9 :
La condizione d’equilibrio è che sia:
F~ + F~1 + F~2 = 0
ovvero
F~ = − F~1 + F~2
Consideriamo quindi un riferimento xy con l’asse x coincidente in direzione e verso con la forza F~1
e con l’asse y coincidente in direzione e verso con la forza F~2 . In tale riferimento le due forze saranno
espresse da:
F~1 = (2.94 , 0)
F~2 = (0 , 1.70)
La risultante sarà quindi:
~ = F~1 + F~2 = (2.94 , 1.70)
R
215
9.6. SOLUZIONI
T
T
mg
Figura 9.17: Un corpo tenuto da una fune
e la forza richiesta sarà:
~ = (−2.94 , −1.70)
F~ = −R
con un modulo dato da:
~
F = 3.40N
Svolgimento dell’esercizio 9.10 :
Per determinare le tensioni dei fili occorre considerare come si distribuisce la forza peso del corpo.
Considerando che le due tensioni dei fili, indicate con T , devono essere uguali, per simmetria,
avremo che le componenti orizzontali delle tensioni saranno uguali e contrarie mentre la somma delle
componenti verticali saranno uguali alla forza peso del corpo. Risulta pertanto che:
m g = 2 T sin θ
Per la prima risposta abbiamo:
T =
mg
2 × 10
=
= 20N
2 sin θ
2 sin 30◦
mentre per la seconda si ha:
sin θ =
per cui
2 × 10
mg
=
= 0.05
2T
2 × 200
θ = arcsin 0.05 = 0.05rad = 2.9◦
Svolgimento dell’esercizio 9.11 :
Le equazioni cardinali della statica, nel nostro caso, possono essere scritte come:
F1 + F 2 − M g
F1 l1 + F 2 l2 − M g
= 0
L
2
= 0
ove con F1 ed F2 si sono indicate le due reazioni vincolari ed i momenti delle forze sono stati calcolati
rispetto all’estremo della sbarra, come indicato in Fig. 9.18.
Ricavando la forza F2 dalla prima equazione e sostituendo nella seconda abbiamo:
= M g − F1
F2
F1 l1 + M g l 2 − F 1 l2 = M g
L
2
per cui
F1 = M g
L
2
3
− l2
− 2.5
= 400 × 10 × 2
= 1740N
l1 − l 2
2.5 − 0.2
216
CAPITOLO 9. LA STATICA DEI SOLIDI
0.2
2.5
Figura 9.18: Una sbarra poggiata su due ritti
mentre:
F2 = M g − F1 = 400 × 10 − 1740 = 2260N
Per la seconda parte occorre indicare con x la distanza dall’estremo a cui si pone il corpo e riscrivere
le equazioni cardinali della statica:
F1 + F 2 − M g − m g
= 0
L
2
−m g x = 0
F1 l1 + F 2 l2 − M g
Imponendo che le due reazioni vincolari siano uguali si ha:
2 F1
= (M + m) g
F1 (l1 + l2 ) = M g
Si ottiene allora
F1 =
e
L
2
+m g x
(M + m)
g
2
(M + m)
L
(l1 + l2 ) g = M g
+m g x
2
2
ovvero
x=
(M + m)
M L
(l1 + l2 ) −
2m
m 2
che numericamente fornisce
x=
400 3
(400 + 50)
× (0.2 + 2.5) −
× = 0.15m
2 × 50
50
2
Svolgimento dell’esercizio 9.12 :
La forza di attrito statico massima è:
F =µmg
con direzione qualsiasi.
La forza elastica generata dalla molla è invece:
F1 = −k r
e quindi è posizione di equilibrio qualunque posizione contenuta nel cerchio di raggio r, dato dalla
relazione:
k r=µmg
ovvero:
217
9.6. SOLUZIONI
µmg
0.3 × 2 × 10
=
= 5.0m
k
1.2
r=
Svolgimento dell’esercizio 9.13 :
Per potersi ottenere l’equilibrio, le forze peso agenti sui due corpi devono produrre nel tratto di filo
verticale ed in quello orizzontale, tensioni tali da avere, per risultante, una forza giacente lungo la
direzione del tratto di filo obliquo. Detta allora T la tensione della fune nel tratto orizzontale e T 1 le
due tensioni della fune nel tratto obliquo, abbiamo:
T =mg
e la condizione di equilibrio è
mg=T
= 2 T1 sin θ
M g = 2 T1 cos θ
per cui
mg
θ = arctan
M g
= arctan
1
4
= 0.25rad = 14◦
Svolgimento dell’esercizio 9.14 :
Le forze agenti sulla sfera sono il peso P , applicato nel suo centro di massa e diretto verticalmente
verso il basso, la tensione T della fune, diretta verso l’alto lungo la direzione della fune stessa, ed infine
la reazione vincolare F della muro, diretta perpendicolarmente al muro, da questo verso la sfera.
L’equilibrio del sistema impone che sia:
P + T + F~ = 0
Scegliamo ora un riferimento xy, con l’asse x orizzontale diretta dalla parete verso l’esterno, e con
l’asse y diretto verticalmente, verso l’alto.
In questo riferimento le tre forze si scrivono come:
P
= (0 , −m g)
T
= (T sin θ , T cos θ)
F~
= (F , 0)
ove con θ si è indicato l’angolo che il filo forma con la verticale. Esso è dato dalla relazione:
sin θ =
R
L
Per l’equilibrio delle forze deve essere, per l’asse x:
F = T sin θ = T
R
R
=
L
L
e. per l’asse y:
m g = T cos θ = T
ovvero
s
1−
R2
L2
mgL
2 × 10 × 0.5
=√
= 20.4N
T =√
2
2
L −R
0.52 − 0.12
218
CAPITOLO 9. LA STATICA DEI SOLIDI
Ne consegue che:
F =
T R
20.4 × 0.1
=
= 4.08N
L
0.5
Svolgimento dell’esercizio 9.15 :
Per poter bilanciare il peso P = m g del lampione, il cavo deve essere leggermente inclinato, di un
angolo θ, rispetto all’orizzontale. La sua lunghezza dovrà essere pertanto:
L=
l
l
=p
cos θ
1 − sin2 θ
D’altra parte la somma delle due tensioni, ai lati del lampione, dovranno essere uguali in modulo,
per motivi di simmetria, ovvero dovranno essere uguali le loro componenti orizzontali. Per le componenti verticali abbiamo che la loro somma dovrà uguagliare la forza peso del lampione. Risulta
quindi:
mg
T =
2 sin θ
ovvero
mg
sin θ =
2T
ed in definitiva
L=
2T
l
=p 2 2
l
cos θ
2 T − m2 g 2
Se non vogliamo che il cavo si rompa la tensione della fune non deve superare il carico di rottura
e quindi la lunghezza del cavo deve essere di almeno:
L= p
2R
2 × 200 × 20
√
l
=
= 21.8m
22 R 2 − m2 g 2
22 × 2002 − 162 × 102
Svolgimento dell’esercizio 9.16 :
Per ottenere il bilancio basta uguagliare i momenti delle due forze, la forza F ed il peso P . Abbiamo
quindi:
P r=F R
ovvero
P =F
R
200 × 0.30
=
= 1000N
r
0.06
Svolgimento dell’esercizio 9.17 :
Poichè la potenza è legata alla forza dalla relazione:
W =F v
abbiamo che la forza applicata alla manovella è:
F =
W
v
e quindi viene generato un momento motore:
τ =F r=
W r
600 × 0.30
=
= 5.0N m
v
36
219
9.6. SOLUZIONI
30°
Figura 9.19: Una sbarra, imperniata ad un estremo, è tenuta ferma da una fune
Svolgimento dell’esercizio 9.18 :
Calcoliamo il momento delle forze applicate sulla sbarra, rispetto al perno:
F L cos θ − T l cos θ = 0
ove
è la forza elastica della molla e quindi è anche data da:
T = k x = k l sin θ
Si ha quindi:
F L cos θ = T l cos θ = (k l sin θ) l cos θ = k l 2 sin θ cos θ
ovvero
F L = k l2 sin θ
per cui
F L
θ = arcsin
k l2
0.03 × 0.10
= arcsin
3.33 × 0.062
= 0.25rad = 14.5◦
Svolgimento dell’esercizio 9.19 :
La reazione vincolare del muro nel punto in cui è fissato il filo sarà ovviamente uguale alla tensione
del filo.
Sulla sbarra sono applicate la sua forza peso P = m g, diretta verticalmente verso il basso ed
applicata nel baricentro della sbarra, la tensione T del filo, diretta verso l’alto lungo la direzione del
filo, ed infine la reazione vincolare F del muro nel punto di incernieramento, la cui direzione non è
precisabile.
Per l’equilibrio dei momenti delle forze, calcolati rispetto al punto di incernieramento, si ha:
P
L
= T L cos θ
2
e quindi:
T =
che numericamente fornisce
T =
P
2 cos θ
3 × 10
= 17.3N
2 × 0.866
220
CAPITOLO 9. LA STATICA DEI SOLIDI
Per determinare ora la reazione vincolare nel punto di incernieramento scomponiamo tale forza
lungo le direzioni orizzontale e verticale indicandole con F 1 ed F2 rispettivamente.
Per l’equilibrio delle forze deve risultare:
F1 = T sin θ = 17.3 × 0.5 = 8.65N
F2 = m g − T cos θ = 3 × 10 − 17.3 × 0.866 = 15.0N
Svolgimento dell’esercizio 9.20 :
Sul corpo inferiore agiscono la forza peso, la reazione normale del piano e la forza di attrito statico
tra corpo inferiore e piano. La forza di attrito statico massima è data da:
F = µ N = µ (m + M ) g cos θ
Tale forza deve essere non inferiore alla componente tangenziale della forza peso del corpo M e
cioè:
F = µ (m + M ) g cos θ ≤ M g sin θ
da cui si deduce che il valore limite dell’angolo di inclinazione è dato dalla relazione:
tan θ =
µ (m + M )
M
per cui
µ (m + M )
0.2 × (1 + 4)
θ = arctan
= arctan
= 0.25rad = 14◦
M
4