POLITECNICO DI MILANO
DIPARTIMENTO DI MATEMATICA
Corsi di Analisi Numerica delle EDP2 e Programmazione
Avanzata per il Calcolo Scientifico
TECNICA DI RICOSTRUZIONE DELLE
DERIVATE PRIME E SECONDE IN 2D.
Prof. Alfio Quarteroni
Prof. Luca Formaggia
Benedetta Franzelli
Matr. 680481
ANNO ACCADEMICO 2006-2007
Contents
1 Introduzione
2
2 Teoria della ricostruzione
2.1 Un esempio 1d . . . . . . . . . . . . . . . . . .
2.2 Proprietà dell’operatore di ricostruzione . . . .
2.2.1 Condizione di consistenza . . . . . . . .
2.2.2 Condizione di località . . . . . . . . . .
2.2.3 Condizione di linearità e limitatezza . .
2.2.4 Ipotesi di superconvergenza . . . . . . .
2.3 Possibili tecniche di ricostruzione del gradiente
2.3.1 Procedure di ricostruzione globale . . .
2.3.2 Procedure di ricostruzione locale . . . .
2.3.3 Operatore di ricostruzione dell’Hessiana
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
3
4
5
5
6
6
7
7
7
8
12
3 Analisi dei risultati numerici
3.1 Esempio 1: comportamento uniforme . .
3.2 Esempio 2: concentrazione centrale . . .
3.3 Esempio 3: concentrazione in un angolo
3.4 Esempio 4: infittimento su 2 lati . . . .
3.5 Esempio 5: infittimento su un lato . . .
3.6 Esempio 6: diffusione e trasporto . . . .
3.7 Conclusioni sui metodi . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
13
13
19
23
26
29
32
35
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
4 Codice C++ per i metodi ricostruttivi
4.1 Geometria del problema: file SHAPE.HPP . . . . . . . . . .
4.2 Generazione e gestione della mesh: MESH.HPP . . . . . . . .
4.3 Polinomio interpolante e gradiente esatto: POLINOMI.HPP .
4.4 Metodi per la risoluzione di un sistema lineari: METODI.HPP
4.5 Metodi di ricostruzione: RICOSTRUZIONE.HPP . . . . . . .
4.6 Il calcolo dell’errore: ERRORE.HPP . . . . . . . . . . . . . .
4.7 Inserimento dei dati da parte dell’utente: UTENTE.HPP . .
4.8 Come funziona il programma: MAIN.CPP . . . . . . . . . . .
36
38
40
41
43
44
44
45
45
5 Conclusioni
47
1
Chapter 1
Introduzione
Il calcolo del gradiente di una approssimazione ad elementi finiti risulta
spesso necessario da un punto di vista applicativo. Numerose quantità
macroscopiche (quali gli sforzi e le deformazioni nell’elasticità, il campo elettrico in elettrostatica e la corrente nei semiconduttori) sono infatti descritte
in termini del gradiente. Le derivate prime (e seconde), inoltre, vengono
spesso usate nella costruzione di stime a posteriori dell’errore di discretizzazione.
D’altra parte la componente normale del gradiente di un’approssimazione
FEM risulta generalmente discontinua attraverso i lati degli elementi della
mesh. La quantità di interesse risulta cosı̀ discontinua. Stesso risultato si
ottiene quando si sceglie di lavorare con polinomi P1 nella costruzione della
soluzione approssimata: il gradiente calcolato sarà dato da funzioni costanti
a tratti.
Si rende quindi necessaria l’introduzione di opportune procedure di postprocessing dei gradienti all’interno dei codici di calcolo, al fine di fornire approssimazioni più regolari. Queste procedure prendono il nome di tecniche
di ricostruzione del gradiente della soluzione discreta. Sotto opportune ipotesi forniscono soluzioni più accurate rispetto ai gradienti veri della
soluzione approssimata.
Obbiettivo di questo lavoro quindi è descrivere l’idea generale alla base
delle tecniche ricostruttive, concentrandosi poi sulla descrizione di quattro
metodi (capitolo 2). Nel capitolo 4 si descriverà il codice scritto in C++
che calcola il gradiente e l’ Hessiana con i metodi presentati. I risultati
ottenuti per diverse funzioni verranno analizzati, nel capitolo 3, in termini
di accuratezza e tempo di calcolo al fine di ricercare un qualche criterio su
quale e quando un metodo risulti vincente piuttosto che un altro.
2
Chapter 2
Teoria della ricostruzione
Dato un poligono Ω ⊂ R2 , si considera una famiglia di triangolazioni {Th }
di Ω tale che ogni coppia di triangoli in Th abbia in comune al massimo un
vertice o un lato.
Si definisce lo spazio ad elementi finiti lineari a tratti:
Xh1 = {v ∈ H 1 (Ω) : v |T ∈ P1 (T )}
dove P1 (T ) indica lo spazio dei polinomi di grado non superiore a 1 ristretto
al triangolo T :
P1 (T ) = {v(x, y) = v00 + v10 x + v01 y, (x, y) ∈ T }.
La soluzione EF di grado 1 sarà data da:
uh (x, y) =
1 X
i
X
uij Li (x)Lj (y)
i=0 j=0
dove uij = u(xi , yj ), L
à i (x) e L
à j (y) sono i polinomi di Lagrange:
Y x − xk
.
L
à i (x) =
xi − xk
k6=i
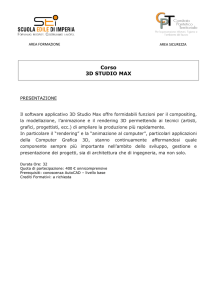
Figure 2.1: La figura di sinistra mostra triangolazioni ammissibili (sopra)
e non ammissibili(sotto). A destra invece si mostra la mappa affine dal
triangolo di riferimento T̂ al triangolo T ∈ Th .
3
CHAPTER 2. TEORIA DELLA RICOSTRUZIONE
4
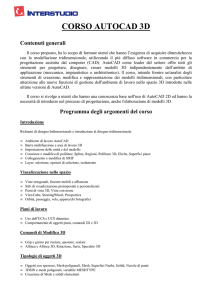
Figure 2.2: Polinomio di Lagrange caratteristico in due dimensioni di grado
0 e 1.
Si ricorda che i calcoli verranno effettuati su un triangolo di riferimento.
Ogni elemento T ∈ Th , di area uguale a |T |, è l’immagine attraverso la
mappa affine x = FT (x̂) = BT (x̂) + bT del triangolo di riferimento T̂ di
vertici (0,0), (1,0) e (0,1) nel piano x̂ = (x̂, ŷ), dove la matrice invertibile
BT e il vettore bT sono dati da:
¯
¯
¯x2 − x1 x3 − x1 ¯
¯
¯
BT = ¯
y2 − y1 y3 − y1 ¯
bT = (x1 , y1 )T ,
(i)
mentre le coordinate dei vertici di T sono dati da aT = (xi , yi )T . Tramite
la mappa affine è possibile lavorare sul triangolo di riferimento e in seguito
rapportare i risultati al triangolo T ∈ Th . Per ulteriori approfondimenti si
veda [1].
Ad ogni nodo Ni , 1 ≤ i ≤ M , si associa una patch Ki , costituita da
tutti i triangoli T ∈ Th che hanno il nodo Ni come vertice. L’area della
patch Ki coincide con il supporto della funzione base nel nodo Ni .
2.1
Un esempio 1d
In questa sezione proponiamo un caso monodimensionale di ricostruzione
della derivata prima per facilitare la comprensione del problema e dell’idea
di base per la sua risoluzione.
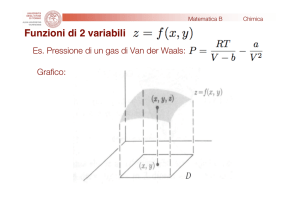
Chiamiamo uh la soluzione ad elementi finiti lineari. Il suo gradiente
esatto ∇uh fornisce un’approssimazione discontinua per il gradiente esatto
∇u. Si ricostruisce allora il gradiente tramite elementi finiti lineari, facendo
riferimento alla figura (2.1). Si calcolano i valori • che ∇uh assume nei punti
medi degli intervalli. Ad ogni nodo ◦ si associa il valore ? calcolando la media tra i due valori • che lo circondano. La nuova approssimazione di ∇u
si ottiene interpolando i nuovi valori ? utilizzando le stesse funzioni base di
uh . Risulterà quindi essere anch’essa lineare a pezzi e continua su tutto il
CHAPTER 2. TEORIA DELLA RICOSTRUZIONE
5
Figure 2.3: Ricostruzione del gradiente nel caso monodimensionale
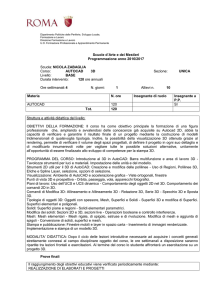
Figure 2.4: Ricostruzione del gradiente nel caso bidimensionale
dominio.
OSS 1. Per mediare i valori di ∇uh nei nodi ◦ esistono differenti tecniche
e di conseguenza diverse approssimazioni ? per ∇u, caratterizzate da costi
computazionali e accuratezza differenti.
OSS 2. E’ possibile estendere la tecnica al caso bidimensionale sia nel caso
di elementi della mesh triangolari che quadrati (nel seguito si considereranno
solo elementi triangolari). Il valore assunto dal gradiente ∇u in corrispondenza del centro della patch ◦ sarà dato come combinazione dei valori del
gradiente ∇uh assunti nei baricentri • degli elementi che compongono la
patch. I nuovi valori ? calcolati per il centro di ogni patch verrano interpolati usando le funzioni di base di uh per ottenere il gradiente ricostruito.
2.2
Proprietà dell’operatore di ricostruzione
Prima di descrivere alcune tecniche di ricostruzione e di valutarne l’efficacia
numerica, è importante formalizzare le condizioni sufficienti dell’operatore
di ricostruzione GR (uh ), affinchè lo stesso sia una buona approssimazione di
∇u. Per una trattazione rigorosa si faccia riferimento a [3].
2.2.1
Condizione di consistenza
Come in tutte le tecniche numeriche, si richiede per un operatore di postprocessing che in circostanze favorevoli questo riproduca il risultato esatto.
CHAPTER 2. TEORIA DELLA RICOSTRUZIONE
6
Si richiede allora che valga la seguente condizione:
COND 1: Sia u un polinomio di grado p + 1 sulla patch K (cioè u ∈
Pp+1 (K) ). Allora:
GR (Πh (u)) = Πh (∇u)
su K.
E’ possibile dimostrare che questa proprietà è vera quando u è un polinomio
quadratico e uh coincide con l’interpolato Πh (u) lineare a pezzi di u. Quindi
è garantita la consistenza sui P2 , cioè GR (Πh (v)) = ∇v per ogni v ∈ P2 . Per
la dimostrazione si veda [2].
2.2.2
Condizione di località
Una richiesta pratica importante è che il calcolo di GR sia poco costoso.
Idealmente dovrebbe essere possibile calcolare il gradiente ricostruito senza
rifarsi al problema globale, altrimenti risulterebbe più semplice risolvere il
problema originale di partenza su una mesh più fine. Gli schemi più convenienti ricostruiscono il gradiente in un punto x0 come una combinazione
lineare dei valori del gradiente dell’approssimazione campionati nei punti
vicini a x0 . Questa condizione può essere scritta come:
COND 2: Se x0 ∈ K, allora il valore del gradiente ricostruito GR (u)(x0 )
dipende solo dai valori di ∇uh campionato sulla patch K.
2.2.3
Condizione di linearità e limitatezza
La forma del gradiente ricostruito dovrebbe idealmente poter essere maneggiata in maniera efficiente dalle strutture dati preesistenti all’interno del
codice. In particolare GR dovrebbe essere una funzione semplice, che possa
essere valutata e integrata agevolmente. La scelta per questo lavoro è quella
dei polinomi Xh1 , cioè di polinomi lineare a tratti:
COND 3: GR : X → X × X è un operatore lineare e esiste una costante
C, indipendente da h, tale che:
kGR (uh )kL∞ (K) ≤ C|uh |W 1,∞ (K)
per ogni approssimazione ad elementi finiti uh ∈ X. Si osservi che è stata
inoltre aggiunta l’ipotesi di linearità e limitatezza.
CHAPTER 2. TEORIA DELLA RICOSTRUZIONE
2.2.4
7
Ipotesi di superconvergenza
Quest’ultima condizione unita alla consistenza, alla località, alla limitatezza
e alla linearità rendono GR (uh ) un’approssimazione di ∇u migliore di quanto
lo sia ∇uh .
COND 4: Se u ∈ H 3 (Ω) e la partizione è uniforme, allora esiste una
costante C tale che:
|uh − Πh (u)|H 1 (Ω) ≤ Ch2 |u|H 3 (Ω) ,
ovvero uh è superconvergente all’interpolato Πh (u).
Ricordando che
|u − uh |H 1 (Ω) ≤ Ch|u|H 3 (Ω) ,
ne segue che uh è un’approssimazione di Πh (u) migliore di quanto non lo sia
per u. Si osservi che la superconvergenza non dipende dalla scelta fatta per
l’operatore GR (.).
2.3
2.3.1
Possibili tecniche di ricostruzione del gradiente
Procedure di ricostruzione globale
Una prima famiglia di tecniche di ricostruzione comprende le procedure
di ricostruzioni globali. Queste tecniche però presentano un costo computazionale molto elevato, poichè calcolare GR (uh ) costa circa il doppio di
quanto costi calcolare l’approssimazione uh . Come già detto precedentemente è conveniente richiedere al ricostruttore di lavorare patchwise, cioè
sulle singole patch. Solo per completezza riportiamo quindi un metodo di
ricostruzione globale ( proposto da O.C.Zienkiewicz e J.Z.Zhu in [4] ), che
però non affronteremo dal punto di vista numerico.
Proiezione L2 (Ω) del gradiente ∇uh su [Xh1 ]2 :
Il gradiente ricostruito GR (uh ) è soluzione dell’equazione
Z
Z
GR (uh ) · vdΩ =
∇uh · vdΩ
Ω
Ω
per ogni v ∈ [Xh1 ]2 . Sia Nh l’insieme dei nodi della griglia Th e ϕi la funzione base dello spazio Xh1 associata al nodo Ni ∈ Nh . Si riscrive il gradiente ricostruito in funzione delle basi dello spazio studiato: GR (uh )(x) =
CHAPTER 2. TEORIA DELLA RICOSTRUZIONE
8
P
Ni ∈Nh GR (uh )(Ni )ϕi (x), dove i valori nodali GR (uh )(Ni ) sono soluzioni
del sistema:
¶
Z
X µZ
X |T |
ϕi ϕj dΩ GR (uh )(Ni ) =
∇uh · ϕj dΩ =
∇(uh |T )
3
Ω
Ω
Ni ∈Nh
T 3Nj
per ogni Nj ∈ Nh ed essendo |T | l’area del triangolo T.
2.3.2
Procedure di ricostruzione locale
La seconda famiglia di tecniche di ricostruzioni è composta da procedure di
ricostruzione locale. Lavorando con funzioni non necessariamente continue,
anzichè usare l’operatore di interpolazione di Lagrange si preferisce lavorare
con l’interpolato di Clément ΠC .
Data una funzione v ∈ L2 (Ω), sia Pi v la proiezione di una funzione v|Ki ∈
L2 (Ki ) sul sottospazio Pk (Ki ), cioè:
Pi v ∈ P1 (Ki )
(v − Pi v, p)Ki = 0
(2.1)
per ogni p ∈ Pk (Ki ),dove (., .)Ki rappresenta il prodotto scalare L2 in Ki .
L’operatore di Clément è definito come:
Πc v =
M
X
Pi v(Ni )ϕi ,
i=1
dove M è il numero dei nodi della mesh. L’operatore di ricostruzione del
gradiente GR : Xh1 → (Xh1 )2 è allora dato da:
·
µ
¶
µ
¶¸
∂uh
∂uh
GR uh = ΠC (∇uh ) := ΠC
, ΠC
.
∂x
∂y
E’ ora possibile sostituire il prodotto scalare L2 dell’equazione (2.1) con
un prodotto scalare pesato, ad esempio:
Z
(v, w)Ki =
v(x)w(x)gi (x)dx
Ki
dove gi (x)|T è il peso. Risolvendo l’integrale con grado k = 0 si ottengono i metodi che appartengono alla classe delle tecniche della media pesata
(weighted average techniques). I valori nodali sono ricavati esplicitamente come:
1 X
GR (uh )(Ni ) =
gi |T ∇(uh |T )
W
T 3Ni
CHAPTER 2. TEORIA DELLA RICOSTRUZIONE
dove W =
P
T 3Ni
9
gi |T .
Usando invece i punti di Gauss e/o i punti di ottimo d’ integrazione nel
calcolo dell’integrale dell’equazione (2.1) si ottengono i metodi che appartengono alla classe delle tecniche di ricostruzione sulla patch (patch recovery
techniques). Per maggiori dettagli si veda [5].
WEIGHTED AVERAGE TECHNIQUES
Una classe tra le tecniche locali più importanti è la famiglia dei metodi di
media pesata. Il gradiente dell’ approssimazione ad elementi finiti fornisce
un’approssimazione discontinua del gradiente esatto. Questa può essere usata per costruire un’approssimazione in ogni nodo mediando i contributi
pesati di tutti gli elementi che circondano il nodo. Questi nuovi valori vengono poi interpolati per ottenere un’approssimazione continua sull’intero
dominio.
All’interno di questa classe descriviamo due metodi che verranno in seguito
analizzati anche dal punto di vista numerico.
Lumping della matrice di massa (Metodo MEDIA):
Zienkiewicz e Zhu nel 1987 presentarono questo metodo al fine di ridurre
il costo computazionale dell’approccio globale (si veda [4]). Scegliendo in
(2.1) di lavorare con k=0, i valori nodali GR (uh )(Ni ) possono essere ricavati
esplicitamente come:
GR (uh )(Ni ) =
X |T |
∇(uh |T )
|Ki |
T 3Ni
S
dove Ki = T 3Ni T ∈ Th . Risulta corrispondere a un metodo della media
pesata una volta scelto gi (x)|T = |T |. Il valore della derivata nei triangoli
di una patch di area più grande contribuirà maggiormente rispetto al valore
della derivata dei triangoli di area inferiore.
Media pesata con l’inverso della distanza (Metodo ID):
Nell’equazione
GR (uh )(Ni ) =
1 X
gi |T ∇(uh |T )
W
T 3Ni
si sceglie gi (x) = kNi − bKT k, dove bKT è il baricentro del triangolo T . In
questo modo si privilegia il valore che la derivata assume nei nodi che fanno
parte della patch e che sono maggiormente vicini al nodo di interesse.
CHAPTER 2. TEORIA DELLA RICOSTRUZIONE
10
Figure 2.5: Ricostruzione del gradiente col metodo SPR
PATCH RECOVERY TECNIQUES
Su ogni patch locale è possibile ottenere delle soluzioni GR (uh ) sotto forma
di espansione polinomiale, cioè:
[GR uh (x)]j = P (x)aj
dove [GR uh (x)]j è la componente j-esima del gradiente definita sulla patch
e aj è il vettore colonna dei coefficienti del polinomio da determinare. I
monomi presenti in ogni colonna della matrice P (x) sono quelli presenti
nelle funzioni base degli elementi utilizzati. Nel caso di triangoli lineari
P (x) = [1, x, y]. I coefficienti non noti aj possono essere calcolati tramite
metodi diversi. Di seguito ne vengono riportati due.
Superconvergent Patch Recovery technique (Metodo SPR)
Si cerca GR (.) ∈ [Xh1 ]2 come soluzione di un problema locale discreto ai
minimi quadrati. Si generalizza al caso bidimensionale il modello proposto
in [6]. Partendo da un campionamento di ∇uh nei baricentri bKi = (xKi , yKi )
• dei triangoli costituenti la patch Kp viene ricostruito il valore di GR (uh ) in
corrispondenza del centro della patch Np . Le componenti del gradiente nel
nodo Np GR (uh )(Np ) = (G1R (uh )(Np ), G2R (uh )(Np )) vengono determinate
nella forma:
GjR (uh )(Np ) = P (Np )T aj
per j = 1, 2, dove P (x) = [1, x, y]T è il vettore dei polinomi P1 utilizzati per
la costruzione di Xh1 , mentre gli aj sono i vettori delle incognite determinati
mediante un’approssimazione ai minimi quadrati basata sui valori discreti
∇uh (bKi ). Il problema diviene allora:
si cerca aj tale che I(aj ) =
P ³ ∂uh
i
´2
T aj )
(b
−
P
(b
)
sia minimo
K
K
i
i
∂xj
per j=1,2. Tale condizione è verificata se aj è soluzione del sistema
M aj = bj
CHAPTER 2. TEORIA DELLA RICOSTRUZIONE
11
Pelp
Pelp
h
per j=1,2 con M = i=1
P (bKi )P (bKi )T e bj = i=1
P (bKi ) ∂u
∂xj (bKi ), dove
elp indica il numero di elementi che costituiscono la patch p-esima.
Il problema può essere riscritto nella seguente forma matriciale:
GGT aj = Gbj
dove:
¯
¯ 1
¯
¯xK
G = ¯¯ 1
¯ yK1
¯
¯
1 ¯
¯
xK2
xKelp ¯¯
yK2
yKelp ¯¯
¯
¯
¯ ∂uh
¯
¯
¯ ∂xj (bK1 ) ¯
¯ ∂uh (b ) ¯
¯ ∂xj K2 ¯
¯
bj = ¯¯
..
¯
¯
¯
.
¯
¯ ∂uh
¯ ∂x (bKelp )¯
j
1
···
···
···
Minimizzazione di un funzionale (Metodo ZZ):
Per questo metodo si veda [7]. Si cerca GR (.) ∈ [Xh1 ]2 come soluzione di
un problema locale continuo ai minimi quadrati. I vettori delle incognite aj
vengono cercati minimizzando il funzionale
¶2
Z µ
∂uh
(x) − P (x)T aj dx
I(aj ) =
∂xj
Ki
con j=1,2. Questo comporta la risoluzione di un sistema lineare di equazioni:
Pi aj = bi
dove
Pi =
eli µZ
X
n=1
bi =
¶
P (x)P (x)dx
T
Tn
eli µZ
X
n=1
¶
∂uh
P (x)
dx
∂xj
Tn
T
dove eli è il numero di elementi nella patch e Ωn è l’area legata al triangolo
n-esimo che compone la patch. Si osservi che il valore del gradiente ricostruito dipende esclusivamente dal campionamento di ∇uh sulla patch.
Per il calcolo dell’integrale, lavorando con polinomi P1 si utilizza la formula composita dei trapezi (si veda [1]):
Z
3
|Tn | X
c
1
I1 (f ) =
Πh f (x)dx =
f (aT (j) )
3
Tn
j=1
CHAPTER 2. TEORIA DELLA RICOSTRUZIONE
12
Figure 2.6: Nodi di interpolazione. Il calcolo dell’integrale con la formula
composita dei trapezi viene effettuata coi nodi del triangolo di mezzo
che ha grado di esattezza pari a 1 ed il cui ordine di infinitesimo rispetto a
h è uguale a 2.
OSS 1: La matrice Pi è simmetrica e definita positiva.
OSS 2: Il numero di equazioni che devono essere risolte simultaneamente
è piccolo (tre se si lavora con triangoli lineari) ed il costo della valutazione
della ricostruzione è proporzionale al numero di nodi della griglia.
OSS 3: Una volta che i vettori dei parametri a sono calcolati, il gradiente
in un nodo è facilmente determinato.
OSS 4: La ricostruzione del gradiente funziona meglio per nodi interni piuttosto che sulle patches vicino ai bordi. L’esistenza di nodi di bordo comporta
dei risultati poco accurati finchè la patch è costituita da pochi elementi. Per
risolvere questo inconveniente è possibile ricostruire il gradiente con le tecniche Patch recovery per i nodi interni ed applicare invece i metodi weighted
average per i nodi di bordo.
2.3.3
Operatore di ricostruzione dell’Hessiana
E’ possibile studiare l’operatore di ricostruzione anche per la matrice Hessiana HR (uh ) ∈ [Xh1 ]2×2 data da:
HR (uh ) =
H ∗ (uh ) + (H ∗ (uh ))T
2
dove H ∗ (uh ) è la matrice definita come:
H ∗ (uh ) =
µ
¶¶
¶¶¶T
µ µ
µ µ
∂uh
∂uh
GR Πc
GR Πc
.
∂x
∂y
Ovviamente esistono anche differenti approcci, ed è anche possibile combinare tra di loro le diverse tecniche ricostruttive per il calcolo delle derivate
seconde. In questo lavoro, ci limitiamo a ricostruire l’Hessiana basandoci
sulle quattro tecniche presentate sopra prese singolarmente.
Chapter 3
Analisi dei risultati numerici
L’obbiettivo di questo lavoro è la descrizione di alcuni metodi di ricostruzione
e un’analisi di tipo numerico per comprendere se e sotto quali ipotesi una
tecnica sia da prediligere piuttosto che un’altra. Per fare questo si considereranno diverse funzioni (sufficientemente regolari), di cui si ricostruirà
il gradiente e l’Hessiana tramite le 4 tecniche illustrate lavorando su mesh
uniformi e mesh adattate fornite dal programma di calcolo Freefem++. Le
stime degli errori nel calcolo del gradiente e dell’Hessiana:
µZ
¶2
2
kG(u) − GR (uh )kL =
(∇u − GR (uh )) · (∇u − GR (uh ))dΩ
Ω
µZ
kH(u) −
HR (uh )k2L
=
Ω
¶2
(H(u) − HR (uh )) · (H(u) − HR (uh ))dΩ
saranno utilizzati come indici della bontà della tecnica di ricostruzione.
3.1
Esempio 1: comportamento uniforme
Si considera la funzione u(x, y) = exp(−(x − 0.5)2 − (y − 0.5)2 ) sul dominio
Ω = (0, 1)2 .
Mesh uniforme:
Tramite Freefem si costruisce la mesh uniforme di partenza costituita da 50
elementi (la lunghezza degli elementi è quindi di h = 0.2). Ad ogni iterazione
si dimezza la dimensione h fino ad arrivare a una mesh costituita da 51200
elementi. Si studia il comportamento delle quattro tecniche ricostruendo le
derivate e calcolando le due stime di errore. Si presta particolare attenzione
al calcolo delle derivate nei nodi di bordo nei due metodi di patch recovery.
Nei nodi di bordo si applicherà o il metodo in esame o il metodo della media
inversa (nel secondo caso li chiameremo metodi SPR+INV e ZZ+INV). Si
13
CHAPTER 3. ANALISI DEI RISULTATI NUMERICI
14
Figure 3.1: a) Soluzione esatta b) Componente x del gradiente della
soluzione esatta c) Componente xx dell’hessiana della soluzione esatta
osservi che il comportamento dei 4 metodi è qualitativamente lo stesso.
GRAD
Media
INV
SPR
ZZ
SPR+INV
ZZ+INV
50
0.072752
0.0816795
1.183319
0.0698597
0.073927
0.073927
100
0.023396
0.0247928
0.121435
0.0221542
0.0234452
0.0234452
400
0.0077647
0.00796322
0.259151
0.00727214
0.00775759
0.00775759
3200
0.00264629
0.00267602
0.0148015
0.00246074
0.00264313
0.00264313
12800
0.000917238
0.000921919
0.00702885
0.000849407
0.000916374
0.000916374
Figure 3.2: Componente del gradiente e dell’Hessiana ricostruita con il
metodo SPR. Si osservi l’esistenza di valori sul bordo distanti dal valore
esatto. Il grafico dell’Hessiana è schiacciato per effetto di un valore sbagliato
molto grande nel nodo (1,0)
Si osservi che i valori calcolati con la tecnica SPR sia per il gradiente che per
l’Hessiana risultano decisamente maggiori rispetto a quelli ottenuti con gli
altri metodi. Questo perchè il metodo SPR calcola dei valori poco accurati
nei nodi di bordo. Il problema sembra risolversi applicando il metodo della
media inversa nei nodi esterni (metodo SPR+INV).
CHAPTER 3. ANALISI DEI RISULTATI NUMERICI
HESS
Media
INV
SPR
ZZ
SPR+INV
ZZ+INV
50
0.375431
0.425249
332.282
0.3516
0.380524
0.380524
100
0.211518
0.224706
2.95069
0.196105
0.211826
0.211826
400
0.149454
0.151765
37.5316
0.14135
0.149154
0.149154
3200
0.109394
0.109741
1.24149
0.104662
0.109207
0.109207
15
12800
0.0792117
0.0792429
1.67497
0.0761731
0.0791185
0.0791185
Figure 3.3: Andamento qualitativo del tempo di calcolo per i vari metodi
Il metodo INV, sebbene mostri risultati simili agli altri metodi, risulta in
tutte le iterazioni peggiore rispetto a ZZ e a quello di media. Interessante è
il confronto tra MEDIA e ZZ, studiato sia col metodo di media inversa per i
nodi esterni che nella versione standard. In questo caso la versione standard
risulta sempre vincente, mentre il metodo di media risulta migliore rispetto
alllo ZZ+INV solo nelle prime iterazioni.
Prime conclusioni da verificare negli altri esempi per griglie uniformi:
1. Il metodo di media presenta un buon rapporto accuratezza costo computazionale
2. il metodo standard ZZ ha l’accuratezza maggiore, ma anche il costo
computazionale più elevato.
3. Il metodo SPR fornisce errori significativamente peggiori degli altri
metodi, il problema viene risolto introducendo un controllo sui nodi di
bordo.
CHAPTER 3. ANALISI DEI RISULTATI NUMERICI
16
Si osservi inoltre che:
• il calcolo col metodo ZZ, sebbene offra risultati migliori, è computazionalmente più complesso e comporta un tempo di calcolo notevolmente
maggiore rispetto al metodo MEDIA (e al metodo ZZ+INV)
• il metodo ZZ+INV e il metodo SPR+INV forniscono risultati pressocchè identici
• il metodo ZZ+INV supera il metodo MEDIA una volta che il numero
di nodi interni è di molto superiore al numero di nodi esterni (sperimentalmente per ogni nodo esterno si hanno quattro nodi interni)
• il metodo SPR+INV corregge gli errori del metodo SPR sui nodi esterni
MESH ADATTATA
Tramite Freefem è possibile costruire una mesh adattata per il problema in
esame tramite la funzione adaptmesh(). Questa funzione prende in ingresso
Figure 3.4: Griglia adattata alla prima e all’ultima iterazione. In questo
caso non vi è molta differenza.
la griglia di partenza da adattare e la funzione su cui basare l’adattazione.
Vi sono poi dei parametri ulteriori che si possono scegliere per caratterizzare l’adattazione di griglia. E’ possibile ad esempio fissare la lunghezza
minima e massima per ogni elemento, cercare di mantenere il più possibile i
vertici di partenza, fissare l’errore o la metrica da usare. In questo lavoro si
sfrutteranno due parametri per analizzare la robustezza dei vari metodi dalle
caratteristiche della griglia. Innanzittutto si costruisce a partire dalla griglia
di 50 elementi uniforme tramite 5 iterazioni successive la griglia adattata con
CHAPTER 3. ANALISI DEI RISULTATI NUMERICI
17
Figure 3.5: Risultati ottenuti sulla griglia adattata all’ultima iterazione. a)
Componente x del gradiente ricostruito col metodo della Media b) Componente xx del gradiente ricostruito col metodo della Media
i parametri standard della funzione adaptmesh(). Vengono riportati i risultati ottenuti per la prima griglia adattata e l’ultima griglia trovata.
GRAD
Media
INV
SPR
ZZ
SPR+INV
ZZ+INV
50
0.072752
0.0816795
1.183319
0.0698597
0.073927
0.073927
1 iter
0.00639991
0.00742848
0.0273363
0.00550232
0.00659395
0.00659395
ultima iter
0.00666939
0.0075084
0.124705
0.00585982
0.00694518
0.00664568
Il comportamento qualitativo per il gradiente e per l’Hessiana non è di molto
dissimile, sebbene l’errore per l’Hessiana sia di molto maggiore. Per calcolare
l’Hessiana si applica due volte il metodo, di conseguenza gli errori commessi
saranno amplificati.
HESS
Media
INV
SPR
ZZ
SPR+INV
ZZ+INV
50
0.375431
0.425249
332.282
0.3516
0.380524
0.380524
1 iter
0.116627
0.135441
2.02289
0.0935778
0.111993
0.111993
ultima iter
0.121143
0.125721
12.3486
0.0945305
0.0997407
0.109269
Con la prima iterazione di adattazione il valore ottenuto per tutti i metodi
si abbassa, raggiungendo con 900 elementi un ordine di grandezza che corrisponde a una griglia uniforme con più di 1000 elementi. Questo comporta
innanzittutto un costo computazionale minore. Si osservi che alla fine del
CHAPTER 3. ANALISI DEI RISULTATI NUMERICI
18
processo iterativo l’errore cresce anche se di poco, poichè diminuisce il numero di elementi in esame a 880. Ancora una volta il metodo SPR funziona
male a causa del mal funzionamento nei punti di bordo . Poichè la mesh
adattata non è molto diversa da una mesh uniforme il comportamento qualitativo dei vari metodi non cambia.
ADATTAZIONE CON NUMERO DI ELEMENTI COSTANTI
Tramite un altro parametro della funzione adaptmesh() (nbvx = numero
massimo di nodi) è possibile fissare il numero massimo di nodi della griglia.
Di conseguenza è possibile esercitare un controllo sul numero di elementi
della griglia.
GRAD
Media
INV
SPR
ZZ
SPR+INV
ZZ+INV
50
0.072752
0.0816795
1.83319
0.0698597
0.073927
0.073927
1 iter
0.0431438
0.0296571
1.20583
0.0348511
0.0294463
0.0345911
ultima iter
0.0296775
0.0210865
3.56302
0.0240998
0.0214811
0.0239924
Figure 3.6: Griglia adattata alla prima e all’ultima iterazione. In questo
caso non vi è molta differenza.
In questo caso si è imposto un numero massimo di nodi pari a 200, che
hanno portato alla costruzione di mesh composte da circa 320 elementi. Si
è quindi deciso di partire con una griglia iniziale composta da 50 elementi e
di adattarla con 6 iterazioni di griglie con al massimo 200 nodi.
CHAPTER 3. ANALISI DEI RISULTATI NUMERICI
HESS
Media
INV
SPR
ZZ
SPR+INV
ZZ+INV
50
0.375431
0.425249
332.282
0.3516
0.380524
0.380524
1 iter
0.356509
0.256426
20031.17
0.273017
0.203776
0.277427
19
ultima iter
0.284378
0.205775
7808.65
0.214554
0.170251
0.217568
Si riportano i risultati sulla griglia di partenza, sulla mesh della prima iterazione di adattazione e sull’ultima mesh calcolata. In questo caso non si
ottiene il risultato sperato. Il motivo può essere ricercato nella costrizione
forte sul numero dei nodi, che comporta una perdita di informazioni in
alcune iterazioni. Questo comportamento era in effetti intuibile già a partire dalle mesh prodotte via Freefem. Quest’ultime, infatti, al procedere
dell’iterazione non andavano verso una configurazione finale, ma cambiavano notevolmente, indicando il fatto che difficilmente si sarebbe raggiunta
una configurazione ottimale per la mesh adattata. Si osservi che in questo
caso il metodo INVERSA e il metodo SPR+INV battono il metodo MEDIA
e il metodo ZZ+INV e perfino il metodo ZZ. Da questa prima analisi si può
iniziare a supporre che:
1. il metodo MEDIA e il metodo ZZ (e ZZ+INV) forniscono delle stime
migliori se si lavora con griglie strutturate o su griglie adattate ad hoc.
2. il metodo SPR+INV e il metodo INV funzionano in maniera peggiore
su griglie ben adattate, ma lavorano meglio su griglie non strutturate
o costruite appositamente.
3.2
Esempio 2: concentrazione centrale
Si considera la funzione u(x, y) = exp(−100(x − 0.5)2 − 0.1(y − 0.5)2 ) sul
dominio Ω = (0, 1)2 . Si procede in maniera del tutto analoga per questa
nuova funzione. Se la funzione precedente era caratterizzata da una forte
simmetria, questa funzione invece porterà alla generazione di griglie infittite
in una striscia verticale centrale. D’ora in poi riporteremo solo i risultati
ottenuti per il gradiente. Le conclusioni ricavate sul gradiente si potranno
poi applicare anche all’Hessiana.
MESH UNIFORME
Il comportamento è del tutto analogo al caso precedente.
CHAPTER 3. ANALISI DEI RISULTATI NUMERICI
20
Figure 3.7: a) Soluzione esatta b) Componente x del gradiente della
soluzione esatta c) Componente xx dell’hessiana della soluzione esatta
GRAD
Media
INV
SPR
ZZ
SPR+INV
ZZ+INV
50
4.07784
4.11136
4.09433
4.07689
4.07928
4.07928
100
1.21446
1.23455
1.38035
1.20054
1.21307
1.21307
400
0.529852
0.532658
0.602807
0.523703
0.529576
0.529576
3200
0.143846
0.144532
0.180559
0.140532
0.143779
0.143779
12800
0.037848
0.0380098
0.0545226
0.0361933
0.0378322
0.0378322
Il metodo SPR e il metodo INVERSO sono i due meno accurati, mentre il
metodo ZZ risulta sempre il migliore. Il metodo SPR commette un errore che
rispetto all’errore commesso dagli altri metodi cresce al crescere del numero
degli elementi.
Figure 3.8: Risultati ottenuti sulla griglia adattata all’ultima iterazione. a)
Componente x del gradiente ricostruito col metodo della Media b) Componente xx del gradiente ricostruito col metodo della Media
MESH ADATTATA
Si propongono i risultati per la prima mesh del ciclo (380 elementi) e la mesh
finale ottimale (345 elementi).
CHAPTER 3. ANALISI DEI RISULTATI NUMERICI
GRAD
Media
INV
SPR
ZZ
SPR+INV
ZZ+INV
50
4.07784
4.11136
4.09433
4.07689
4.07928
4.07928
1 iter
0.0912201
0.126089
0.191808
0.0809992
0.110929
0.100837
21
ultima iter
0.0385979
0.0489994
2.98803
0.0326069
0.0445527
0.0353608
Figure 3.9: Griglia adattata alla prima e all’ultima iterazione.
Si osservi ancora una volta il buon funzionamento dell’adattazione di griglia:
si ottiene un errore corrispondente a quello di una mesh uniforme con più
di 12000 elementi. Qualitativamente il risultato ottenuto è come sopra: il
metodo MEDIA e ZZ battono il metodo SPR e il metodo INV.
MESH ISOTROPICA
Visto la scarsità degli elementi nella griglia adattata, sembra abbastanza inutile un’analisi sui metodi fissando il numero di nodi della griglia. Per mesh
caratterizzata da triangoli cosı̀ schiacciati, sembra invece più interessante
studiare il comportamento delle varie tecniche di ricostruzione, richiedendo
tramite il parametro iso=true della funzione adaptmesh() di lavorare con
mesh isotropiche. Questo comando porterà alla creazione di mesh composte
da triangoli pressocchè equilateri. Per riuscire a descrivere l’infittimento
nella zona centrale della mesh con triangoli equilateri, la triangolazione
sarà composta da 5132 (mesh alla prima iterazione) e 8162 elementi (mesh
all’ultima iterazione), implicando quindi un costo computazionale maggiore
rispetto alle matrici adattate.
CHAPTER 3. ANALISI DEI RISULTATI NUMERICI
22
Figure 3.10: Griglia adattata alla prima e all’ultima iterazione.
GRAD
Media
INV
SPR
ZZ
SPR+INV
ZZ+INV
50
4.07784
4.11136
4.09433
4.07689
4.07928
4.07928
1 iter
0.0796898
0.0821293
3.7865
0.0809992
0.075385
0.075385
ultima iter
0.0328687
0.053522
2.93954
0.0302428
0.0410212
0.0306863
Si sperava che i metodi della media e della media inversa fossero avvantaggiate dall’utilizzo di triangoli equilateri. Questi metodi infatti sono sensibili
alla forma degli elementi della mesh. Sebbene i metodi MEDIA e ZZ forniscano risultati migliori, si è propensi a pensare che questo miglioramento
sia dovuto all’utilizzo di molti più elementi rispetto all’adattazione standard
piuttosto che all’utilizzo di triangoli equilateri. Per quanto riguarda questi
due metodi, si è portati a pensare che non convenga il passaggio a elementi
di tipo equilatero, poichè il costo computazionale è notevolmente aumentato rispetto a quello relativo alla mesh adattata standard. Il metodo della
media inversa, che a priori avrebbe dovuto ricavare dei vantaggi da questa
scelta, ne risente invece in maniera negativa. Questo perchè per descrivere
l’infittimento centrale si useranno, come già detto, molti più elementi, che
saranno di conseguenza molto più piccoli. L’inverso delle distanze tra baricentro e vertici del triangolo su cui si basa questo metodo tenderà a crescere
notevolmente portando a un peggioramento del risultato finale. Per quanto
riguarda la dipendenza dell’accuratezza dei metodi dalla forma dei triangoli
si può dedurre che:
1. il metodo ZZ non richiede di lavorare con triangoli equilateri
2. i metodi MEDIA e INV probabilmente risentono della forma dell’elemento,
ma il primo metodo guadagna in accuratezza in virtù di un numero
CHAPTER 3. ANALISI DEI RISULTATI NUMERICI
23
maggiore di elementi piuttosto che per l’equilaterità degli elementi,
mentre il secondo metodo perde più in accuratezza per l’utilizzo di elementi molto piccoli piuttosto che guadagnarne per la loro equilaterità
3.3
Esempio 3: concentrazione in un angolo
1
sul dominio Ω = (0, 1)2 . Questa
Si considera la funzione u(x, y) = (x+y+0.1)
funzione porterà un’infittimento della mesh in un angolo del dominio.
Figure 3.11: a) Soluzione esatta b) Componente x del gradiente della
soluzione esatta c) Componente xx dell’hessiana della soluzione esatta
MESH UNIFORME
Il comportamento qualitativo questa volta è leggermente diverso nelle mesh
con un numero di elementi piccolo.
GRAD
Media
INV
SPR
ZZ
SPR+INV
ZZ+INV
50
13.2136
13.1755
18.8802
13.2483
13.2168
13.2168
100
5.65883
5.6588
6.77946
5.68023
5.69694
5.69694
400
2.30514
2.35221
4.42616
2.30955
2.36109
2.36109
3200
0.907759
0.966755
1.66836
0.904174
0.947978
0.947978
12800
0.346463
0.384122
0.881725
0.342686
0.363962
0.363962
Nelle prime due mesh, infatti, il metodo della media inversa presenta un
errore minore, seguita dal metodo ZZ+INV (e ZZ+SPR) e dal metodo della
MEDIA. Si osservi che finchè il metodo della media inversa presenta l’errore
minore il metodo ZZ+INV è migliore rispetto alla sua versione standard. Al
crescere del numero degli elementi il comportamento qualitativo ritorna a
essere quello simile.
MESH ADATTATA
Si procede ancora una volta con l’adattamento standard della mesh. Anche in questo caso la sua applicazione risulta vincente, raggiungendo alla
CHAPTER 3. ANALISI DEI RISULTATI NUMERICI
24
Figure 3.12: Risultati ottenuti sulla griglia adattata all’ultima iterazione.
a) Componente x del gradiente ricostruito col metodo della Media b) Componente xx del gradiente ricostruito col metodo della Media
prima iterazione con 256 elementi un errore che sulla griglia adattata veniva
raggiunto con più di 3500 elementi, mentre all’ultima iterazione con soli 141
elementi si raggiunge una precisione ottenibile solo con più di 12800 elementi
su griglia uniforme.
GRAD
Media
INV
SPR
ZZ
SPR+INV
ZZ+INV
50
13.2136
13.1755
18.8802
13.2483
13.2168
13.2168
1 iter
0.632171
0.630064
3.00312
0.601562
0.635798
0.617642
ultima iter
0.113059
0.0985932
0.497515
0.0623844
0.0956929
0.09087
Figure 3.13: Griglia adattata alla prima e all’ultima iterazione.
Questo è un chiaro esempio di quanto una buona griglia riesca a migliorare
le prestazioni dei metodi di ricostruzione. E’ possibile supporre che:
CHAPTER 3. ANALISI DEI RISULTATI NUMERICI
25
1. quando si lavora con pochi elementi tutti concentrati su un angolo il
metodo della media inversa ottiene la migliore prestazione e il metodo
ZZ+INV batte il metodo della media
2. quando la concentrazione dei nodi si verifica al centro della mesh oppure se si lavora con tanti elementi il metodo della media funziona
meglio rispetto al metodo della media inversa
3. il metodo SPR lavora particolarmente male poichè c’è la possibilità
di perdere le informazioni nei nodi di bordo, che in questo caso sono
particolarmente importanti.
MESH ISOTROPICHE
Visto che la triangolazione della griglia finale presenta dei triangoli molto
schiacciati sembra interessante studiare come si comportano i metodi di
ricostruzione qualora si lavori con triangoli equilateri.
GRAD
Media
INV
SPR
ZZ
SPR+INV
ZZ+INV
50
13.2136
13.1755
18.8802
13.2483
13.2168
13.2168
1 iter
0.811751
0.847777
2.7782
0.780098
0.816532
0.804249
ultima iter
0.162307
0.161427
3.81638
0.129827
0.151351
0.14311
Figure 3.14: Griglia adattata alla prima e all’ultima iterazione.
La prima mesh sarà composta da circa 200 elementi e raggiunge un’accuratezza
che veniva offerta da una mesh uniforme di circa 3000 elementi. Si osservi
che il comportamento è lo stesso di quello su una mesh uniforme con appunto 3000 elementi. L’ultima iterazione offre una mesh di 405 elementi con
CHAPTER 3. ANALISI DEI RISULTATI NUMERICI
26
una precisione che riferita alla griglia uniforme si ottiene con più di 12800
elementi. Lavorare comunque con triangoli equilateri in questo caso non è
conveniente poichè i risultati ottenuti con l’adattazione standard risultano
migliori. Qui i due metodi ZZ sono i migliori (a causa del numero elevato
di elementi), ma il metodo della media inversa si conferma ancora una volta
capace di lavorare bene in un problema in cui si ha una concetrazione in un
angolo.
ADATTAZIONE CON NUMERO DI ELEMENTI COSTANTI
Per questa funzione particolare, i cui valori elevati sono concentrati in un
angolo della mesh, può essere interessante cercare di costruire una mesh
che dia buoni risultati con pochi elementi. Si osservi però che il metodo
d’adattazione standard in questo caso crea una mesh con un numero di
elementi minore di 200.
3.4
Esempio 4: infittimento su 2 lati
Si studia ora la funzione u(x, y) = (1 − x40 )(1 − y 40 ). Questa funzione porta
a un infittimento della griglia in prossimità di due lati.
Figure 3.15: a) Soluzione esatta b) Componente x del gradiente della
soluzione esatta c) Componente xx dell’hessiana della soluzione esatta
MESH UNIFORME
Per matrici con un numero di elementi inferiore a 10000 il metodo INV
risulta vincente rispetto a tutti gli altri metodi, seguito dal metodo ZZ.
CHAPTER 3. ANALISI DEI RISULTATI NUMERICI
GRAD
Media
INV
SPR
ZZ
SPR+INV
ZZ+INV
50
14.6509
14.6386
22.8822
14.648
14.6504
14.6504
100
9.39145
9.37398
9.68395
9.38725
9.39106
9.39106
400
5.12069
5.10763
5.07641
5.11597
5.12048
5.12048
3200
2.32789
2.32296
2.33577
2.32444
2.32783
2.32783
27
12800
0.936967
0.935713
0.949168
0.93511
0.936955
0.936955
Si ha ancora una volta la conferma che il metodo della media inversa funziona meglio nel caso di gradienti forti in prossimità dei lati della mesh,
migliore perfino del metodo ZZ anche se computazionalmente è molto meno
complesso.
Figure 3.16: Risultati ottenuti sulla griglia adattata all’ultima iterazione.
a) Componente x del gradiente ricostruito col metodo della Media b) Componente xx del gradiente ricostruito col metodo della Media
MESH ADATTATA
Figure 3.17: Griglia adattata alla prima e all’ultima iterazione.
La prima matrice adattata è composta da 570 elementi ed ha un ordine
CHAPTER 3. ANALISI DEI RISULTATI NUMERICI
28
di precisione che si raggiungeva con griglie uniformi con più di 3200 elementi.
Media
INV
SPR
ZZ
SPR+INV
ZZ+INV
50
14.6509
14.6386
22.8822
14.648
14.6504
14.6504
1 iter.
0.61688
0.635729
1.7152
0.605296
0.616698
0.619846
ultima iter.
0.109409
0.12082
35.7527
0.106398
0.112644
0.110654
Nell’ultima griglia si lavora con oltre 1000 elementi ma con una precisione
raggiungibile con griglia uniforme solo con più di 13000 elementi.
Al contrario dell’esempio precedente, lavorando sulla mesh adattata il metodo
MEDIA è più accurato del metodo INV. Si osservi però che il numero degli
elementi per le mesh adattate è più elevato rispetto al caso precedente. Si
ricorda che il metodo della media inversa funziona meglio di MEDIA soprattutto nel caso di griglia di pochi elementi.
MESH ISOTROPICA
Anche in questo caso adattando la mesh si ottengono dei triangoli molto
schiacciati. Si cerca di vedere ancora una volta se lavorare con triangoli
equilateri possa portare dei benefici o meno ai metodi ricostruttivi. Con la
Figure 3.18: Griglia adattata alla prima e all’ultima iterazione.
prima iterata si ottiene una mesh di 2000 elementi ma con una precisione per
mesh di oltre 3000 elementi, come capitava con la mesh adattata. L’ultima
mesh è 16000 elementi, con una precisione superiore a quella ottenuta con
la mesh uniforme.
CHAPTER 3. ANALISI DEI RISULTATI NUMERICI
Media
INV
SPR
ZZ
SPR+INV
ZZ+INV
50
14.6509
14.6386
22.8822
14.648
14.6504
14.6504
1 iter.
0.647879
0.653547
2.92849
0.641105
0.643693
0.644508
29
ultima iter.
0.101862
0.120678
0.273793
0.0960087
0.0993348
0.0971036
Ancora una volta il metodo della media funzione meglio di INV (come sempre riteniamo che questo sia causato dall’elevato numero di elementi della
griglia). Le osservazioni fatte in merito al miglioramento dei metodi con
l’utilizzo di triangoli equilateri restano le stesse.
3.5
Esempio 5: infittimento su un lato
Si studia ora la funzione u(x, y) = (1 − x40 ). Questa funzione porta a un
infittimento della griglia in prossimità di un lato.
Figure 3.19: a) Soluzione esatta b) Componente x del gradiente della
soluzione esatta c) Componente xx dell’hessiana della soluzione esatta
MESH UNIFORME
Ancora una volta, il metodo della media inversa risulta migliore rispetto al
metodo della media a causa del forte gradiente in prossimità del lato destro
della griglia.
GRAD
Media
INV
SPR
ZZ
SPR+INV
ZZ+INV
50
11.1255
11.1108
16.6841
11.1247
11.1245
11.1245
100
6.88163
6.86321
7.16503
6.88041
6.88105
6.88105
400
3.70903
3.69588
3.71015
3.70763
3.70883
3.70883
3200
1.68255
1.67768
1.70628
1.68156
1.68252
1.68252
12800
0.677094
0.675864
0.687295
0.676594
0.677091
0.677091
CHAPTER 3. ANALISI DEI RISULTATI NUMERICI
30
Per una mesh di 50 elementi i metodi ZZ+INV e SPR+INV sono superiori
alla loro versione standard. A partire però da una mesh di 100 elementi,
i risultati per ZZ sono migliori rispetto alla versione modificata. Troviamo
quindi un’ulteriore conferma di quanto detto finora:
1. il metodo INV funziona meglio del metodo della media finchè il gradiente è concentrato lungo un lato o vertice della mesh
2. i metodi corretti ZZ+INV e SPR+INV forniscono dei risultati migliori
della versione standard (con un costo computazionale molto ridotto)
finchè la mesh è composto da un numero relativamente piccolo di elementi e il metodo della media inversa funziona bene.
MESH ADATTATA
Figure 3.20: Griglia adattata alla prima e all’ultima iterazione.
Lavorando con una griglia di soli 127 elementi si recupera un errore che
si aveva solo su una griglia uniforme con più di 3200 elementi e con 153
elementi si raggiunge un’accuratezza ancora maggiore.
GRAD
Media
INV
SPR
ZZ
SPR+INV
ZZ+INV
50
11.1255
11.1108
16.6841
11.1247
11.1245
11.1245
1 iter.
1.01814
1.02612
1.35683
1.0305
1.03042
1.02451
ultima iter.
0.0697682
0.0737744
14.7326
0.0657949
0.07177
0.070284
Ancora una volta il metodo della media batte il metodo INV su una mesh
adattata anche se composta da pochi elementi. Si può dedurre allora che
generalmente su una griglia adattata funziona meglio MEDIA piuttosto che
il metodo della media inversa. Il metodo ZZ resta sempre il metodo migliore,
anche se il tempo di calcolo è elevato.
CHAPTER 3. ANALISI DEI RISULTATI NUMERICI
31
Figure 3.21: Risultati ottenuti sulla griglia adattata all’ultima iterazione.
a) Componente x del gradiente ricostruito col metodo della Media b) Componente xx del gradiente ricostruito col metodo della Media
MESH ISOTROPICA
Figure 3.22: Griglia adattata alla prima e all’ultima iterazione.
L’analisi su una mesh isotropica non risulta conveniente rispetto a lavorare su una mesh adattata standard poichè si ottengono due matrici di
oltre 1100 e circa 8900 elementi che portano comunque dei risultati meno
accurati delle matrici adattate standard.
GRAD
Media
INV
SPR
ZZ
SPR+INV
ZZ+INV
50
11.1255
11.1108
16.6841
11.1247
11.1245
11.1245
1 iter.
1.46087
1.45803
1.45533
1.4536
1.46062
1.46004
ultima iter.
0.0756749
0.0989536
4.38856
0.0731755
0.0759857
0.0741438
Come già osservato in precedenza il fatto di utilizzare elementi isotropici non
migliora i risultati del metodo inverso perchè si utilizzano triangoli troppo
piccoli. Un’eventuale soluzione potrebbe essere imporre una dimensione
CHAPTER 3. ANALISI DEI RISULTATI NUMERICI
32
minima degli elementi, ma questo potrebbe portare a delle mesh che non
riescono a descrivere il forte gradiente nel lato destro della mesh.
3.6
Esempio 6: diffusione e trasporto
Si affronta ora un problema di diffusione e trasporto:
−∆u + u = 0 in Ω = (0, 1)2
∂n u = sin(πx) su Γup ≡ {y = 1, 0 < x < 1}
u = 0 su ∂Ω\Γup
la cui soluzione esatta è data da:
u(x, y) =
con λ =
sinh λy
sin(πx)
λ cosh(λ)
√
1 + π2.
Figure 3.23: a) Soluzione esatta b) Componente x del gradiente della
soluzione esatta c) Componente xx dell’hessiana della soluzione esatta
MESH UNIFORME
La soluzione esatta è una funzione regolare e non presenta gradienti elevati
in prossimità dei lati della mesh.
GRAD
Media
INV
SPR
ZZ
SPR+INV
ZZ+INV
50
0.101345
0.101622
0.182811
0.0999169
0.101705
0.101705
100
0.0381634
0.0382113
0.134237
0.0371527
0.0382869
0.0382869
400
0.0138859
0.0138961
0.159535
0.0134263
0.0139151
0.0139151
3200
0.00497636
0.00497847
0.0115107
0.00479414
0.00498224
0.00498224
12800
0.00177098
0.0017714
0.00510333
0.0017029
0.00177208
0.00177208
CHAPTER 3. ANALISI DEI RISULTATI NUMERICI
33
Di conseguenza il metodo della media funziona meglio del metodo della
media inversa, anche se di poco. In generale la differenza dei risultati tra
ZZ e la sua versione modificata è piccola quando la derivata esatta della
soluzione non presenta gradienti elevati. E’ allora conveniente utilizzare il
metodo modificato perchè presenta un costo computazionale inferiore.
MESH ADATTATA
Figure 3.24: Griglia adattata alla prima e all’ultima iterazione.
Si procede all’adattamento della mesh tramite il metodo standard.
GRAD
Media
INV
SPR
ZZ
SPR+INV
ZZ+INV
50
0.101345
0.101622
0.182811
0.0999169
0.101705
0.101705
1 iter.
0.0106351
0.0110155
0.0212598
0.0100074
0.0104462
0.0105636
ultima iter.
0.00820553
0.00881764
0.0182514
0.00754251
0.00801394
0.0081214
Si ottiene una prima mesh di 650 elementi che saranno addossati al lato
superiore della mesh restando comunque dei triangoli pressochè equilateri.
La precisione della prima mesh è uguale a quella di una mesh uniforme con
più di 800 elementi. La matrice finale è composta da 683 elementi e migliora
leggermente l’accuratezza dei metodi. Studiando la mesh stessa è possibile
intuire quale metodo utilizzare: non esistendo un forte raffinamento della
mesh in prossimità di un lato, ma presentando solo una concentrazione di
triangoli equilateri nella parte superiore della mesh, è consigliabile utilizzare
il metodo della media piuttosto che la media inversa. Sebbene il metodo
ZZ funzioni meglio è altresı̀ consigliabile utilizzare il metodo ZZ+INV che
con un piccolo errore aggiuntivo permette di ridurre notevolmente il costo
computazionale.
CHAPTER 3. ANALISI DEI RISULTATI NUMERICI
34
Figure 3.25: Risultati ottenuti sulla griglia adattata all’ultima iterazione.
a) Componente x del gradiente ricostruito col metodo della Media b) Componente xx del gradiente ricostruito col metodo della Media
ADATTAZIONE CON NUMERO DI ELEMENTI COSTANTI
Figure 3.26: Griglia adattata alla prima e all’ultima iterazione.
Dato che la mesh adattata è composta da un numero di triangoli equilateri relativamente grande, risulta più interessante studiare il caso di adattazione con numero di elementi costanti(< 350) piuttosto che procedere
cercando una mesh isotropica.
GRAD
Media
INV
SPR
ZZ
SPR+INV
ZZ+INV
50
0.101345
0.101622
0.182811
0.0999169
0.101705
0.101705
1 iter.
0.0245699
0.0166213
0.248997
0.0169474
0.0149849
0.0171639
ultima iter.
0.0249425
0.0154337
0.933958
0.0160973
0.0133383
0.0160952
Si osserva che dalla prima iterazione all’ultima iterazione il risultato non
cambia molto. Questo perchè come già accaduto nell’esempio 1, la mesh
CHAPTER 3. ANALISI DEI RISULTATI NUMERICI
35
costruita ad ogni iterazione è sottoposta ad un restrizione sui nodi troppo
forte per cui ad ogni passo si rischia la perdita di informazioni importanti.
I risultati seguono comunque l’andamento generale.
3.7
Conclusioni sui metodi
In questo capitolo abbiamo analizzato 4 metodi di ricostruzione locale su
diversi tipi di funzioni. In merito ai risultati ottenuti si possono fare alcune
osservazioni interessanti:
1. il metodo SPR nella sua versione standard commette troppi errori
di valutazione del gradiente nei nodi di bordo, soltanto la versione
modificata può dare dei risultati accurati (esempio 1);
2. il metodo INV risulta il più accurato quando si lavora con griglie uniformi di piccole dimensioni e il gradiente della funzione presenta valori
elevati in prossimità dei vertici o dei lati della griglia (esempi 3,4,5);
3. il metodo INV e il metodo SPR+INV funzionano meglio su griglie non
uniformi e non costruite appositamente, mentre su griglie uniformi,
costruite ad hoc o con un numero elevato di elementi è consigliabile
utilizzare il metodo MEDIA e ZZ+INV (esempio 1,2,6);
4. il metodo ZZ è generalmente il metodo con una miglior precisione di
ricostruzione, ma il tempo di calcolo richiesto è molto più elevato.
La scelta del metodo dovrà allora essere fatta in funzione della griglia su cui
si effettuano i calcoli al fine di ottimizzare il rapporto accuratezza-tempo
di calcolo. Abbiamo infatti illustrato l’esistenza di casi in cui il metodo
della media offre risultati più accurati o di poco dissimili da quelli dello
ZZ, sebbene sia computazionalemnte meno complicato. Allo stesso modo il
metodo INV risulta a volte più accurato del metodo SPR+INV. Al fine di
scegliere il metodo in maniera adeguata è consigliabile analizzare l’aspetto
della mesh.
Chapter 4
Codice C++ per i metodi
ricostruttivi
Il codice proposto permette di calcolare il gradiente ricostruito con i quattro
metodi presentati. Nella scrittura del codice si è cercato di curare contemporaneamente tre aspetti: l’ottimizzazione delle operazioni, la chiarezza e la
semplicità del programma, la possibilità di generalizzarlo e estenderlo facilmente. E’ infatti importante poter riutilizzare il programma su mesh con
elementi quadrangolari o nel caso di elementi finiti quadratici tramite semplici modifiche del codice. In questo lavoro ci concentreremo maggiormente
su questi aspetti, mentre per una descrizione più particolareggiate del codice
si rimanda ai commenti del codice stesso (e all’output di Doxygen).
Obbiettivo del programma è valutare l’errore di ricostruzione per varie
Figure 4.1: Grafico dei file costituienti il programma
36
CHAPTER 4. CODICE C++ PER I METODI RICOSTRUTTIVI
37
funzioni. Ma può anche essere leggermente modificato al fine di ottenere a
partire da un vettore di valori nodali della soluzione approssimata (prodotta
ad esempio da FREEFEM), il suo gradiente e l’hessiana. In questo lavoro descriveremo il codice per il calcolo dell’errore di ricostruzione.
Prima di poter compilare il programma, l’utente dovrà modificare il contenuto del file utente.hpp. All’interno di questo file sarà possibile innanzitutto scegliere la precisione del programma modificando la riga:
typedef double real.
In secondo luogo l’utente dovrà inserire la funzione esatta, le componenti
del gradiente e dell’Hessiana. La prima operazione di main.cpp permette
all’utente di inserire il nome della mesh (specificandone il percorso completo). Questa mesh non è altro che un file con estensione .msh generato da Freefem. Il file si occupa anche della costruzione della struttura
dati mesh. La definizione di questa classe è contenuta in mesh.hpp, mentre la definizione dei suoi elementi (punti, triangoli e patches) è contenuta
nell’header file shape.hpp. All’utente viene inoltre richiesto di inserire un
indice per la forma degli elementi della mesh. Sebbene il codice funzioni solo
per il valore 0 (che corrisponde ai triangoli), questa richiesta dà la possibilità
di introdurre anche mesh con elementi quadrangolari una volta aggiunti alcuni metodi specifici all’approssimazione su quadrati. Con lo stesso intento
all’utente viene richiesto di scegliere il grado del polinomio con cui si lavora.
Anche in questo caso solo una scelta pari a 1 permette il corretto utilizzo del
codice, ma all’utente è data la possibilità di estendere il programma modificando pochi punti. Si osserva però che i metodi proposti in letteratura
sono costruiti specificatamente su elementi triangolari con elementi finiti di
grado 1.
Il programma prosegue con il calcolo dei valori nodali della soluzione u,
del gradiente e dell’Hessiana tramite la funzione sol_uh(). Verrà inoltre
costruito il polinomio interpolante uh , tramite la funzione Lagrange() (che
costruisce i polinomi di lagrange per ogni elemento della mesh) e interpole()
(che fornisce il valore nodale del polinomio interpolante su ogni vertice della
griglia). Si calcola in seguito il gradiente di uh , cioè il gradiente che si otterrebbe derivando la soluzione agli EF in maniera esatta. Per far ciò si
utilizzano le funzioni deriv_x() e deriv_y(). Tutte queste funzioni sono
contenute nel file polinomi.hpp.
A questo punto il programma chiede all’utente quale metodo di ricostruzione
preferisce usare. La ricostruzione del gradiente avviene richiamando le funzioni contenute in ricostruzione.hpp. Alcune di queste utilizzano i metodi
implementati all’interno della libreria LAPACK di Fortran. All’interno del
file metodi.hpp è possibile trovare l’importazione della libreria e con quale
CHAPTER 4. CODICE C++ PER I METODI RICOSTRUTTIVI
38
metodo risolvere il sistema a seconda della precisione. Si osservi che al momento della compilazione bisognerà allora importare la libreria col seguente
comando:
g++ -o main main.cpp -L/usr/local/lib/ -llapack.
Per la ricostruzione dell’Hessiana invece si dovrà costruire il polinomio interpolante per il gradiente ricostruito e applicarvi i metodi per il gradiente.
A questo punto il programma calcola i due errori tramite le funzioni definite
in errore.hpp, visualizzandoli a schermo insieme al tempo di calcolo della
ricostruzione per i vari metodi.
In ultimo si salvano su file i valori nodali delle varie funzioni calcolate. Questi
file .dat permettono la rappresentazione grafica tramite gnuplot seguendo le
istruzioni contenute nel file plot.gnu.
Nel seguito illustreremo gli header file in dettaglio.
4.1
Geometria del problema: file SHAPE.HPP
Nel header file shape.hpp sono definite le classi Point, Shape, Triangle e
Patch che servono a contenere le informazioni sulla griglia del problema.
CLASS POINT :
La classe Point descrive i nodi della mesh. I suoi metodi privati sono:
• x : ascissa del nodo (default 0)
• y : ordinata del nodo (default 0)
• Pid : numero che identifica il nodo (default 0)
• Pb : 0-nodo interno, 1-nodo di bordo, 2-non si conosce se il nodo è
interno o esterno (default 2).
La classe è fornita di costruttore, di metodi che restituiscono i metodi privati, il metodo norma, l’overloading dell’operatore << di visualizzazione a
schermo e dell’operatore − che restituisce la differenza tra due punti.
CLASS SHAPE :
La classe Shape è la classe base per le figure geometriche. I suoi metodi
privati sono:
• SnP : numero di punti della figura (default=0)
• Spoints : vettore dei punti della figura
• SnE : numero di lati
CHAPTER 4. CODICE C++ PER I METODI RICOSTRUTTIVI
39
• Sid : numero che identifica la figura (default=0).
La classe è dotata di costruttore, distruttore (dichiarato virtual per evitare
conflitti con i distruttori delle classi derivate), metodi che restituiscono i
metodi privati e di visualizzazione. Esiste inoltre il metodo baricentro()
che restituisce il suo baricentro. Si osservi la creazione di un membro virtual
measure() dichiarato nullo. Questo fa in modo che la classe Shape sia in
realtà una classe astratta.
OSSERVAZIONE: La costruzione di questa classe può essere vista come un
primo tentativo di generalizzazione. A partire da questa, infatti, è possibile costruire delle classi derivate che descrivano la geometria degli elementi
della mesh. Nel nostro caso triangoli (cui ricordiamo è stato associato il
numero 0) ma è possibile introdurre anche quadrangoli e altre figure (ricordando sempre di associarvi un numero, di modo che l’utente possa passare
la forma degli elementi come parametro del programma).
CLASS TRIANGLE :
La classe Triangle è una classe derivata della classe Shape. Erediterà quindi
i suoi metodi privati. Presenta due diversi costruttori a partire da 3 punti
o da 3 punti e il valore dell’identificatore. Il metodo measure() restituisce
l’area del triangolo, dist_inversa() restituisce l’inverso della distanza del
baricentro da un punto (questo servirà nel metodo della media inversa dove
si calcolerà l’inverso della distanza per i vari nodi del triangolo).
CLASS PATCH :
La class Patch descrive l’unione di triangoli che condividono uno stesso nodo.
I suoi metodi privati sono:
• P tchid : numero che identifica la Patch, coincide con l’identificatore
del nodo centrale
• P tchtriangles : vettore contenente l’identificatore dei triangoli che costituiscono la Patch
• P tchb : il nodo centrale della Patch è di bordo? 0-nodo interno, 1-nodo
di bordo, 2-non si conosce se il nodo è interno o esterno .
La classe è fornita dei metodi di restituzione dei metodi privati e dell’overloading
dell’operatore <<.
OSSERVAZIONE 2: La creazione della classe Patches è di fondamentale
importanza. In tutte le tecniche di ricostruzione, infatti, il valore del gradiente in un punto viene calcolato in funzione del valore assunto nei punti
vicini. E’ quindi possibile immaginare che in diverse circostanze si voglia
richiamare l’insieme dei nodi vicini a un dato vertice. Questa operazione
CHAPTER 4. CODICE C++ PER I METODI RICOSTRUTTIVI
40
è gestibile con qualche ciclo for, ma durante la scrittura di tutto il codice
si è sempre preferito aumentare i costi in termine di spazio di memoria a
beneficio dei costi in termine di tempo.
4.2
Generazione e gestione della mesh: MESH.HPP
La classe Mesh permette di gestire i dati contenuti in un file .msh prodotta da
Freefem. Il file .msh presenta sulla prima riga il numero di nodi, di elementi
e di lati del bordo della mesh. Dalla seconda riga in poi fornisce per ogni
nodo ascissa, ordinata e il lato della mesh cui appartiene (0 se nodo interno).
Si osservi che nel nosto caso non importa a quale lato della mesh un nodo
di bordo appartenga, quindi si assegnerà valore 1 all’identificatore di tutti
quei nodi che non sono interni. Finita la descrizione dei nodi, si trovano le
informazioni per ogni elemento. Su ogni riga si ha l’ID dei nodi che formano
l’elemento e un numero che identifica la forma dell’elemento (se triangolo=0,
se quadrato=1). In ultimo ci sono le informazioni sui lati che costituiscono
il bordo della mesh. I primi due elementi indicano i nodi che ogni lato dei
triangoli unisce, il terzo elemento indica il lato della mesh cui appartengono.
OSSERVAZIONE: il fatto che il file .msh abbia l’informazione della forma
dell’elemento come ultimo numero della riga relativa all’elemento può creare
qualche difficoltà. E’ infatti di più difficile gestione l’informazione sulla
natura di un elemento e la sua costruzione rispetto all’averla come primo
valore della riga. Per ogni riga relativa all’elemento si prelevano sempre
almeno quattro valori (la natura dell’elemento e almeno tre suoi vertici) e se
l’ultimo elemento è pari a zero allora è un triangolo, altrimenti si memorizza
anche il valore successivo perchè è il valore di un vertice per un quadrato.
Questo ragionamento casca nel caso in cui un quadrato abbia proprio come
terzo vertice il nodo di indice 0. Per evitare che si presenti questo tipo di
errore supponiamo di lavorare con griglie composte da elementi dello stesso
tipo, di modo che questa informazione possa essere inserita dall’utente a
schermo. Un’altra soluzione potrebbe essere richiedere al codice di leggere
la lunghezza di ogni riga e da questa dedurre la forma dell’ elemento. Questo
tipo di operazione, seppur semplice, comporterebbe un aumento del costo
computazionale.
CLASS MESH:
I suoi metodi privati sono:
• Mpoints : array di punti che costituiscono la mesh
• Melements : vettore contenente i puntatori ad elementi di tipo shape
che costituiscono la mesh; l’utilizzo di un vettore di puntatori è indispensabile poichè non è possibile inizializzare un vettore di elementi di
cui non si conosce la natura
CHAPTER 4. CODICE C++ PER I METODI RICOSTRUTTIVI
41
• Mpatches : vettore contenente le patches.
La classe è dotata di un costruttore che legge i dati dal file .msh, genera i punti, i triangoli e le patches costituenti la griglia.E’ presenta anche
l’operatore di visualizzazione a schermo della mesh.
OSSERVAZIONE 2: il vettore relativo alle patches viene costruito in maniera
immediata durante la lettura e la generazione della mesh. Con poche accortezze è stato possibile memorizzare le informazioni sulle patches alla
prima lettura del file .msh. Si risparmia cosı̀ almeno un ciclo for che sarebbe
stato necessario nel caso in cui, una volta costruita la matrice mesh, si avesse
voluto costruire le patches su ogni nodo.
OSSERVAZIONE 3: in questo caso la struttura dati per il vettore è quella
della standard library. Solo nel caso di un vettore di reali si preferirà il vettore presente nella libreria UBLAS. Questo perchè, mentre negli altri casi
i vettori sono solo dei ”contenitori” di informazioni, i vettori di reali verranno utilizzati per risolvere il sistema. La libreria UBLAS contiene qualche
funzione per le operazioni tra vettori e matrici (nel nostro caso le matrici
saranno tutte di reali, quindi descritte tramite libreria UBLAS) che risultano comode qualora si vada a risolvere il sistema lineare (per i dettagli si
veda [12]). Negli altri casi si preferisce fare riferimento alla standard library
(si veda [10]) .
4.3
Polinomio interpolante e gradiente esatto: POLINOMI.HPP
All’interno di questo file si trovano le funzioni e le classi che servono alla
costruzione del polinomio interpolante e del gradiente esatto.
FUNZIONE SOL UH:
La funzione sol_uh() fornisce i valori nodali di una funzione. In ingresso la
funzione riceve un puntatore a funzione u, un vettore di Point per il quale
si vuole calcolare il valore della funzione. Ovviamente il numero di punti
per elemento deve essere coerente con la scelta degli elementi e del grado.
Nel nostro caso è sufficiente passare il vettore contenente le informazioni dei
punti della matrice. Nel caso di un grado diverso da uno, sarà necessario
costruire il vettore dei punti necessari per una giusta interpolazione. In uscita fornisce il vettore dei valori nodali. A partire da questi valori è possibile
costruire il polinomio interpolante, nella forma:
uh (x, y) =
i
1 X
X
i=0 j=0
uij Li (x)Lj (y)
CHAPTER 4. CODICE C++ PER I METODI RICOSTRUTTIVI
42
dove uij = u(xi , yj ), Li (x) e Lj (y) sono i polinomi di Lagrange:
n
Y
x − xk
.
Li (x) =
xi − xk
k6=i
CLASS LAGRANGE elem:
Si osserva che, lavorando con il grado uno, su ogni elemento l’unico contributo non nullo delle funzioni base è quello relativo ai nodi dell’elemento.
Questa classe presenta due costruttori. Il primo, generico, avvisa l’utente di
aver scelto una combinazione di forma e grado non contemplata dal codice.
Il secondo costruttore è una specializzazione del costruttore nel caso di triangoli e polinomi di grado 1. Si lavora sul triangolo di riferimento T̂ e traduce
quanto trovato sul triangolo T tramite una mappa affine. I metodi privati
di questa classe forniscono un vettore dei coefficienti per P (x) = (1, x, y) in
ogni nodo. Il costruttore prende in ingresso un elemento della classe Triangle e il grado dei polinomi. Per ogni nodo del triangolo T si ottiene il
contributo della funzione base calcolata sul nodo sul triangolo stesso. La
classe contiene inoltre i metodi che ritornano i valori dei metodi privati.
CLASS LAGRANGE:
La classe Lagrange() fornisce come metodo privato l’insieme dei polinomi
di Lagrange per tutti gli elementi. Il costruttore quindi prende come input
il vettore degli elementi della mesh.
CLASS INTERPOLE elem:
Il metodo privato di questa classe fornisce i coefficienti del polinomio interpolante sull’elemento T. E’ sufficiente sommare sui nodi in esame il contributo di ogni funzione base moltiplicata per il valore nodale. Il costruttore
prende in ingresso un elemento della classe Lagrange_elem e il vettore dei
valori nodali della funzione di cui si sta calcolando il polinomio interpolante.
CLASS INTERPOLE:
La classe fornisce i polinomi interpolanti su ogni triangolo. Prende in ingresso il vettore dei triangoli, il vettore dei valori nodali della funzione e
un elemento della class Lagrange. Bisogna prestare particolare attenzione
affinchè i dati in ingresso siano coerenti tra di loro e che ci sia la giusta
corrispondenza tra nodo in esame e valore della funzione.
FUNZIONI DERIV X / DERIV Y:
Sono definite le due funzioni deriv_x e deriv_y che a partire da un elemento della classe interpole() restituisce il valore della derivata rispetto a
x e a y ( lavorando con EF del primo grado si ottiene un valore costante su
ogni triangolo). Anche loro per semplicità sono state specializzate al caso
in esame.
CHAPTER 4. CODICE C++ PER I METODI RICOSTRUTTIVI
43
OSSERVAZIONE: ancora una volta ci teniamo a dire che si è cercato di generalizzare al massimo le funzioni. Una soluzione alternativa poteva essere
quella di lavorare con le Class Template. Questa scelta sarebbe stata ottimale nel caso in cui si fosse potuto riscontrare qualche elemento comune ad
esempio, nella costruzione tra polinomi di Lagrange su triangoli e quadrati
per diversi gradi. In realtà il polinomio su quadrato è di più facile descrizione
e in questo caso aumentare il grado non comporta particolari difficoltà. Al
contrario aumentare il grado su triangolo è più complicato. Si poteva pensare di far ricorso alle funzioni gerarchiche (si veda [11]) ma in realtà la
scelta del grado avviene all’inizio del programma e non si modifica più. E’
quindi sufficiente definire diversi costruttori a seconda del grado con cui si
vuole lavorare.
4.4
Metodi per la risoluzione di un sistema lineari:
METODI.HPP
All’interno di questo header file sono presenti tutti quei metodi che servono
per la risoluzione del sistema lineare. Sono inoltre presenti delle funzioni
che non dipendono nè dal metodo ricostruttivo scelto, nè dalla forma degli
elementi o del grado. Queste non sono che una serie di operazioni che si
ripetono all’interno del codice e che sono state raggruppate per una miglior
chiarezza. Vengono quindi definite le funzioni: twonorm() che restituisce
la norma di un vettore, dot() che restituisce il prodotto scalare tra due
vettori, area() che restituisce un vettore contenente le aree degli elementi
della griglia, baricen() che restituisce un vettore contenente i baricentri
degli elementi.
OSSERVAZIONE: Le ultime due funzioni vengono richiamate all’interno
dei metodi ricostruttivi. Ancora una volta si è preferito occupare memoria,
risparmiando però del tempo. Infatti, durante la ricostruzione si procede
per patches. Questo significa che ogni elemento viene richiamato tante volte
quanti sono i suoi vertici e se non si costruissero questi due vettori aggiuntivi
si rifarebbe la stessa operazione troppe volte.
La parte più interessante di questo file resta comunque quella dedicata
alla risoluzione di un qualsiasi sistema lineare. Sebbene la risoluzione dei
sistemi non sia di particolare difficoltà (sono comunque matrici 3*3) si è
preferito utilizzare delle funzioni presenti nella libreria LAPACK scritta in
Fortran (per i dettagli si veda [9]). Si è quindi scelto di costruire una function
template che utilizzi metodi diversi a seconda del grado di precisione del
programma. Di default la precisione è double. Si è poi specializzata la
funzione nel caso si stia lavorando con precisione di tipo float. Si ricorda
CHAPTER 4. CODICE C++ PER I METODI RICOSTRUTTIVI
44
ancora una volta che al momento della compilazione sarà opportuno caricare
anche la libreria in questione.
4.5
Metodi di ricostruzione: RICOSTRUZIONE.HPP
In questo header file sono presenti la definzione dei 4 metodi ricostruttivi
presentati. Lo schema è sempre lo stesso: ogni metodo è stato diviso in due
parti. La prima parte permette il calcolo del gradiente ristretto a un solo
elemento (funzioni seguite da patch). La seconda parte poi applica queste
funzioni a tutti gli elementi della mesh. E’ stato utile, inoltre, introdurre due
ulteriori funzioni per il metodo ZZ e SPR (matrix _ SPR e matrix _ ZZ)
che costruiscono la matrice su una singola patch che serve al calcolo del
gradiente in un nodo.
Le funzioni sulla mesh restituiscono un vettore contenente il valore nodale
della grandezza cercata.
OSSERVAZIONE: E’ utile sottolineare il fatto che si è cercato di descrivere
i passaggi comuni ai vari metodi (magari raggruppati a due a due) tramite
un’unica funzione. In questo modo il codice risulta più chiaro e comprensibile. Si osservi inoltre che questo procedimento aiuta a evidenziare quali
sono i tratti in comune e quali specifici di ogni metodo. Questo diviene
evidente quando si vuole vedere la differenza,ad esempio, tra metodo ZZ e
ZZ+INV. Ciò che cambia sono poche righe di codice, cosa che non si sarebbe
colto altrettanto facilmente se non si fossero definite le funzioni sulle singole
patches.
OSSERVAZIONE 2: Si ricorda che questo file è specifico per il caso di elementi di grado uno su triangoli. In letteratura, infatti, la maggior parte dei
metodi viene costruito per questo caso. Si ricorda che una delle qualità di
un buon metodo ricostruttivo era quello di ottenere un gradiente tramite elementi finiti dello stesso grado della soluzione di partenza. Seguendo questa
idea l’utente che desidera utilizzare elementi finiti del secondo ordine non
potrà utilizzare i metodi ricostruttivi descritti in questo file, ma dovrà cercare una loro generalizzazione. Per quanto riguarda invece l’utilizzo di elementi quadrangolari abbiamo già detto che l’applicazione dei metodi qui
illustrati a questo caso è pressochè immediata.
4.6
Il calcolo dell’errore: ERRORE.HPP
All’interno di questo file è possibile trovare quanto è necessario per calcolare
l’errore per il calcolo del gradiente e dell’Hessiana.
FUNZIONE SCALAR():
La funzione viene definita in maniera diversa a seconda che abbia come
CHAPTER 4. CODICE C++ PER I METODI RICOSTRUTTIVI
45
parametro di input un vettore o una matrice. Nel caso in cui riceva un
vettore restituisce la somma del quadrato delle componenti del vettore. Se
riceve in ingresso una matrice restituisce il valore della traccia della matrice
trasposta per la matrice stessa.
REAL ERROR():
La funzione calcola l’errore effettuato dal gradiente ricostruito. Riceve in
ingresso il vettore delle componenti del gradiente esatto ∇u e del gradiente
ricostruito GR uh oltre che il vettore di Triangle.
REAL ERROR2():
La funzione calcola l’errore effettuato dall’Hessiana ricostruita. Oltre che
alle componenti dell’Hessiana esatta Hu e dell’Hessiana ricostruita HR uh
riceve in ingresso un vettore di Triangle.
4.7
Inserimento dei dati da parte dell’utente: UTENTE.HPP
Il programma effettua i conti a partire dalla soluzione esatta u, dalle componenti di ∇u e di Hu. Questi dati vengono inseriti dall’utente nel file
main.hpp dove:
• f : puntatore a funzione che definisce la soluzione esatta u
• dfx : puntatore a funzione che definisce
∂u
∂x
• dfy : puntatore a funzione che definisce
∂u
∂y
• dfxx : puntatore a funzione che definisce
∂2u
∂x2
• dfxy : puntatore a funzione che definisce
∂2u
∂x∂y
• dfyy : puntatore a funzione che definisce
∂2u
.
∂y 2
L’utente può inoltre modificare la precisione dell’ intero programma tramite
il comando: typedef double real.
4.8
Come funziona il programma: MAIN.CPP
Nel file main.cpp vengono richiamati i file di cui si è parlato finora. All’inizio
della funzione main() vengono costruiti la classe Mesh, il valore nodale della
soluzione esatta, del gradiente e dell’Hessiana. Si costruisce poi la base di
Lagrange per tutti i nodi e il polinomio d’interpolazione uh . Si costruisce
il gradiente ∇uh . All’utente sarà allora richiesto di scegliere quale metodo
di ricostruzione usare e, nel caso dei metodi Patch recovery, se utilizzare la
versione modificata per i nodi di bordo. A questo punto verranno ricostruiti
CHAPTER 4. CODICE C++ PER I METODI RICOSTRUTTIVI
46
il gradiente e l’Hessiana. I risultati saranno salvati in un file di tipo .dat
che può essere usato per una rappresentazione grafica via gnuplot. A video
verranno visualizzati l’errore di ricostruzione e il tempo di calcolo per la
ricostruzione della derivata e del gradiente.
OSSERVAZIONE: I risultati ottenuti saranno contenuti in una cartella creata appositamente, se non già preesistente, chiamata ”results” al fine di
rendere più chiara e gestibile la cartella in cui è stato memorizzato il programma.
Chapter 5
Conclusioni
I metodi descritti e i risultati ottenuti permettono la ricostruzione del gradiente in maniera accurata. La forma del gradiente e dell’Hessiana calcolata
risulta simili alla forma esatta.
Per quanto riguarda il codice di calcolo si ritiene di aver scritto un programma sufficientemente efficiente: i calcolati effettuati anche su griglie
composte da numerosi elementi vengono risolti in tempi ragionevoli (per
griglie di 51200 elementi si ottengono tempi di circa 11 secondi). E’ comunque possibile migliorare i tempi di calcolo e l’occupazione di memoria
modificando le strutture dati e la loro gestione (creazione e gestione mesh,
patches, basi lagrange, matrici). Anche per la risoluzione dei sistemi lineari
è possibile utilizzare dei metodi diversi, anche se la ridotta dimensione del
sistema non necessita di metodi particolarmente più veloci.
Numerose sono le possibili estensioni del progetto. Innanzittutto è possibile
migliorare le prestazioni dei metodi, soprattutto per i weighted average traducendo ogni patch tramite delle trasformazioni in una patch di riferimento
su cui verranno effettuati i calcoli.
Si può inoltre approfondire l’analisi dei metodi attraverso la loro applicazione
ad altri tipi di funzioni e di domini. E’ inoltre possibile studiare anche altri
metodi di ricostruzione e qualche loro applicazione ad esempio nell’ambito
della costruzione di stime a posteriori dell’errore o di griglie adattate.
47
Bibliography
[1] A.Quarteroni, A.Sacco, F.Saleri, Numerical Mathematics, SpringerVerlag, 2000, New York
[2] S.Perotto
Ricostruzione
del
gradiente
di
una
soluzione
discreta
e
stimatori
a
posteriori
recovery-based
,
http://mox.polimi.it/it/progetti/adattivita.php3
[3] ???
[4] O.C. Zienkiewick, J.Z. Zhu, A simple error estiamtor and adaptive procedure for pratical engineering analysis, Int.J.Numer.Methods Eng. 24,
337-357 (1987)
[5] R.C. Almeida, R.A. Feijòo, A.C.Galeao, C.Padra, R.S. Silva, Adaptive
finite element computational fluid dynamics using an anisotropic error
estimator, Comput. Methods Appl. Mech. Engrg. 182,379-400 (2000)
[6] O.C. Zienkiewick, J.Z. Zhu, The superconvergent patch recovery
and a posteriori error estimates. Part 1: the recovery technique,
Int.J.Numer.Methods Eng. 33, 1331-1364 (1992)
[7] L.Borges, R.Feijòo, C.Padra, N. Zouain, A directional error estiamtor
for adaptive finite element analysis, Computational Mechanics, New
trends and Applications, Barcelona ,Spain (1998)
[8] V.Comincioli, Analisi numerica:
McGraw-Hill, 1995, Italy
[9] Sito
internet
ufficiale
Boost
www.boost.org/libs/numeric/ublas/
metodi,
Basic
modelli,applicazioni,
Linear
Algebra:
[10] The C++ Standard Library: A tutorial and reference, AWL Publiesher,1999
[11] A.Quarteroni, Modellistica Numerica per Problemi Differenziali,
Springer-Verlag Italia, 2003, Milano
48
BIBLIOGRAPHY
[12] Sito
internet
ufficiale
www.netlib.org/lapack/
49
Linear
Algebra
PACKage: