I Sistemi di riferimento
Un Sistema di Riferimento (SR) è un insieme di regole e misure che ci permettono di
rispondere ai quesiti
dove si trova un punto? quando è avvenuto un evento?
Un sistema di riferimento deve permettere di
vincolare tutti i gradi di libertà del quesito.
Esigenze storiche e strumentali,
nonché differenti applicazioni hanno portato alla definizione di differenti SR per
georeferenziare punti e per temporeferenziare eventi.
I SR tridimensionali
Per definire un SR nello spazio tridimensionale ricorriamo a tre versori e X , eY , e Z con
origine comune, ortogonali e tali da formare una terna destrogira, ovvero tali che
e X ⋅ e X = eY ⋅ eY = 1, e X ⋅ eY = 0, e X × eY = e Z ,
Le coordinate di un punto e il vettore fra due punti
Dato un punto P si tracciano le sue proiezioni ortogonali
sugli assi X , Y , Z identificati dai versori e X , eY , e Z ; data
un opportuna unità di misura lineare u, definite X P , YP , Z P
le lunghezze delle tre proiezioni,
⎡X P ⎤
P è identificato dalla terna P = ⎢ YP ⎥
⎢ ⎥
⎣⎢ Z P ⎥⎦
Il vettore (base) congiungente due punti P e Q è dato da
⎡XQ − X P ⎤
⎡∆X ⎤
⎥
⎢
PQ = ⎢ ∆Y ⎥
= ⎢ YQ − YP ⎥
⎢ ⎥
⎢⎣ ∆Z ⎥⎦ P,Q ⎢⎣ Z Q − Z P ⎥⎦
La trasformazione fra SR
Analogamente a un corpo rigido i gradi di libertà di un SR 3D sono 6: tre componenti di
traslazione e tre angoli
Per definire compiutamente un SR tipicamente
si impone la posizione dell’origine, due angoli di direzione per l’asse Z,
un angolo di direzione per l’asse X.
La trasformazione fra SR
Si considerino due SR [e X eY e Z ]I e [e X eY e Z ]II con uguale origine ma diverso
orientamento degli assi. Per portare gli assi di uno dei due a coincidere con gli assi dell’altro
si deve operare una rotazione. Questa viene in genere (non è l’unico modo possibile!)
realizzata mediante la composizione di tre rotazioni piane rispetto ai tre assi.
Rotazione piana
Rimane fisso uno dei tre assi (asse di rotazione); gli
altri due ruotano in senso antiorario rispetto all’asse di
rotazione; ad esempio per una rotazione pari a un
angolo θ
di X e Y intorno a Z si ha
E’ immediato verificare che la relazione fra coordinate nel primo e nel secondo SR è data
dalla
⎡X ⎤
⎡X ⎤
= R Z ( θ) ⎢ Y ⎥
X P II = ⎢ Y ⎥
= R Z (θ) X P I
⎢ ⎥
⎢ ⎥
⎢⎣ Z ⎥⎦ P , II
⎢⎣ Z ⎥⎦ P , I
ove RZ, matrice di rotazione intorno all’asse Z, è
⎡ cos θ sin θ 0⎤
R Z (θ) = ⎢− sin θ cos θ 0⎥
⎢
⎥
0
1⎥⎦ I
⎢⎣ 0
Nota
La trasformazione fra i versori che definiscono i 2 SR è data invece dalla
[e X
eY
e Z ]II = [e X
eY
e Z ]R TZ (θ)
In generale indichiamo con R X , R Y , R Z le tre matrici di rotazione piana rispetto agli assi
X, Y e Z rispettivamente; siano RX, RY, RZ i relativi angoli di rotazione. Si ha
0
⎡1
R X ( RX ) = ⎢0 cos Rx
⎢
⎢⎣0 − sin Rx
⎡cos RY
R Y ( RY ) = ⎢ 0
⎢
⎣⎢ sin RY
⎡ cos Rz
R Z ( RZ ) = ⎢− sin Rz
⎢
⎢⎣ 0
0 ⎤
sin Rx ⎥
⎥
cos Rx ⎥⎦
0 − sin RY ⎤
1
0 ⎥
⎥
0 cos RY ⎥⎦
sin Rz
cos Rz
0
0⎤
0⎥
⎥
1⎥⎦
La composizione di tre rotazioni piane consecutive è formalizzata mediante il prodotto delle
tre matrici di rotazione in ordine inverso rispetto all’ordine delle rotazioni stesse.
La rotazione completa mediante composizione
di RX, RY, RZ
Si ricorda che l’ordine della composizione di tre rotazioni piane consecutive non è
indifferente: nella rotazione da [e X eY e Z ]I a [e X eY e Z ]II tipicamente si adotta la
sequenza RX, RY, RZ che porta al risultato
⎡X ⎤
⎡X ⎤
⎢ Y ⎥ = R( R , R , R )⎢ Y ⎥
X
Y
Z ⎢ ⎥
⎢ ⎥
⎢⎣ Z ⎥⎦ II
⎢⎣ Z ⎥⎦ I
R ( R X , RY , RZ ) = R Z ( RZ ) R Y ( RY )R X ( R X )
1. Rotazione intorno all’asse X
⎡X ⎤
⎡X ⎤
⎢Y ⎥
= R X ( RX )⎢ Y ⎥
⎢ ⎥
⎢ ⎥
⎢⎣ Z ⎥⎦ RX
⎢⎣ Z ⎥⎦ I
L’angolo di rotazione viene scelto in modo tale che
il nuovo piano [e X , e Z ]RX contenga il futuro versore e Z II ;
il versore eY RX giace sul futuro piano [e X , eY ]II .
2. Rotazione intorno all’asse YRX
⎡X ⎤
⎡X ⎤
⎢Y ⎥
= R Y ( RY ) ⎢ Y ⎥
⎢ ⎥
⎢ ⎥
⎢⎣ Z ⎥⎦ RX
⎢⎣ Z ⎥⎦ RX , RY
Si ottiene il versore e Z II definitivo; il nuovo versore e X RX , RY giace sul futuro piano
[e X , eY ]II
3. Rotazione intorno all’asse ZRX,RY
⎡X ⎤
⎡X ⎤
⎢ Y ⎥ = R ( R )⎢ Y ⎥
Z Z ⎢ ⎥
⎢ ⎥
⎢⎣ Z ⎥⎦ RX , RY
⎢⎣ Z ⎥⎦ II
Rotazione completata!
La matrice di rotazione complessiva per le coordinate è data dal prodotto delle 3 matrici
precedenti
R = R ZR YR X
Nota 1
La trasformazione fra i versori che definiscono i 2 SR in questo caso è data dalla
[e X
eY
e Z ]II = [e X
eY
e Z ]I R T = [e X
eY
e Z ]I R TX R TY R TZ
Nota 2
Si nota da ultimo che R I RTI = RTI R I = I ,
indipendentemente dall’asse (I) e dall’angolo di rotazione;
ne segue che
RT R = ( R K R J R I )T R K R J R I
= RTI RTJ RTK R K R J R I = I = RRT
indipendentemente dall’ordine e dagli angoli delle rotazioni piane: l’inversa di una rotazione
qualunque può essere realizzata applicando alle coordinate ruotate la trasposta della matrice
di rotazione originaria.
La trasformazione completa con fattore di scala
Siano [e X eY e Z ]I e [e X eY e Z ]II due SR con diverso orientamento, diversa origine e
diversa unità di misura delle lunghezze ( u I e u II ). Si ha:
X0 = [ X 0 Y0 Y0 ]T : coordinate dell’origine di [e X eY e Z ]I nel SR [e X eY e Z ]II
R: matrice di rotazione per
portare [e X eY e Z ]I paralleli a [e X eY e Z ]II
λ=
u1
: fattore di scala, ovvero il rapporto fra le unità di misura di lunghezza nei due SR.
u2
Sia P un punto di coordinate [ X
Y
Z ]TP, I nel sistema di riferimento [e X eY e Z ]I e sia R
la matrice di rotazione da [e X eY e Z ]I a [e X eY e Z ]II . Le coordinate di P nel secondo
sistema di riferimento possono essere ottenute applicando nell’ordine la rotazione, il cambio
di scala e la traslazione di origine alle coordinate originali, ovvero
⎡X ⎤
⎡X0⎤
⎡X ⎤
⎢Y ⎥
= ⎢ Y0 ⎥ + λR ⎢ Y ⎥
⎢ ⎥
⎢ ⎥
⎢ ⎥
⎢⎣ Z ⎥⎦ P, II ⎢⎣ Z 0 ⎥⎦
⎢⎣ Z ⎥⎦ P, I
Poiché R dipende dai tre angoli RX, RY, RZ
la trasformazione dipende in totale da 7 parametri.
Alcuni cenni di dinamica terrestre
Per la successiva discussione dei SR adottati in geodesia è necessario introdurre alcuni cenni
di dinamica e fisica terrestre.
Il nostro pianeta compie ciclicamente un’orbita ellittica intorno al Sole (moto di
rivoluzione): il periodo di rivoluzione è di 365.25 giorni solari; il piano contenente l’orbita
terrestre è detto piano dell’eclittica;
Il pianeta inoltre ruota intorno al proprio asse (moto di rotazione): il periodo di rotazione è di
1 giorno solare; asse di rotazione terrestre e asse ortogonale al piano dell’eclittica formano
un angolo di circa 23° 27’.
I moti dell’asse di rotazione terrestre
L’asse di rotazione terrestre compie due moti conici nello spazio:
Moto di precessione:
un moto con angolo al centro di 23°27’ e con periodo di 25800 anni;
Moto di nutazione:
un moto oscillatorio intorno al moto di precessione:
con ampiezza angolare di 9.2” e con periodo di 18.6 anni.
Inoltre il pianeta “oscilla” rispetto al proprio asse di rotazione; ovvero, per un osservatore
solidale al pianeta, la posizione del polo rispetto alla superficie terrestre cambia nel tempo: il
moto è solo approssimatamente conico, ha periodo di circa 435 giorni e ampiezza di circa
0.1”-0.2”. Tale fenomeno prende nome di
fenomeno di polar motion o Chandler Wobble:
(© 1997 Dr. Sten Odenwald)
Alcune definizioni
Sfera celeste:
sfera di raggio unitario centrata sulla Terra (considerata puntiforme) sulla quale vengono
proiettati gli astri; per un osservatore solidale alla Terra la sfera appare ruotare da est a ovest
intorno all’asse di rotazione terrestre.
Equatore celeste:
proiezione del piano equatoriale sulla sfera celeste.
Eclittica:
proiezione dell’orbita apparente del Sole sulla sfera
celeste.
Punti equinoziali:
intersezione dell’eclittica con l’equatore celeste;
γ: equinozio di primavera, γ’ equinozio d’autunno.
Per i moti di precessione e nutazione equatore celeste e punti equinoziali variano nel tempo;
data un’epoca, sottraendo all’equatore celeste e ai punti equinoziali effettivi gli effetti della
nutazione si ottengono Equatore Celeste Medio e Punti Equinoziali Medi
per quell’epoca. In particolare si definiscono:
Equatore Celeste e Punto Equinoziale γ di riferimento.
Equatore e punto equinoziale di primavera medi per le ore 12 del 01.01.2000 (epoca J2000).
Posizione convenzionale del polo per un certo intervallo
La media delle posizioni del polo rispetto alla superficie del pianeta (ovvero la media
rispetto al Chandler Wobble) in un determinato intervallo di tempo.
In particolare:
Origine Convenzionale Internazionale (CIO): media sugli anni 1900-1905;
Polo Convenzionale Terrestre (CTP):
ridefinizione del 1984 del Bureau International dell’Heure (BIH).
Altri moti della massa costituente il pianeta
Fenomeni periodici
maree oceaniche; oscillazioni della distribuzione delle acque dovute
all’attrazione gravitazionale di Sole e Luna: da pochi decimetri a diversi metri
maree terrestri; oscillazioni della distribuzione delle masse solide dovute
all’attrazione gravitazionale di Sole e Luna: alcuni decimetri!
carico oceanico e atmosferico; deformazioni della crosta terrestre, dovute alle oscillazioni di
massa oceanica e atmosferica: alcuni centimetri!
Periodi fondamentali dei precedenti fenomeni: sottomultipli dei periodi
di orbita relativa di sole e luna rispetto a un osservatore solidale alla terra
Fenomeni non periodici
La crosta del pianeta è interessata da fenomeni di:
moto orizzontale (tettonica delle placche, 2-3 cm/anno),
moto verticale (teoria dell’isostasia, fino a 40 cm/anno).
Quindi:
i SR per il posizionamento terrestre devono descrivere una realtà fisica variabile nel tempo,
realizzare un SR implica la stima o la conoscenza esatta a priori di tutti questi fenomeni.
Sistemi di Riferimento in Geodesia
Viene data una definizione formale, cui segue
la realizzazione del SR,
mediante osservazioni fisiche e geometriche (campo di gravità, distanze, angoli),
al suolo e dallo spazio (livellazioni, osservazioni a stelle fisse).
Per realizzare un SR si deve fornire
un catalogo di punti fondamentali di coordinate stimate
coerenti con la definizione del SR,
rispetto ai quali determinare la posizione di nuovi punti.
Poiché ogni realizzazione di un SR dipende dalle osservazioni utilizzate,
realizzazioni diverse della stessa definizione di SR possono differire fra loro.
Sistemi di riferimento astronomici
(inerziali o quasi inerziali)
Origine nel centro di massa dei corpi celesti, direzioni degli assi definite da direzioni
astronomiche fisse; vengono utilizzati per lo studio del moto degli astri e dei satelliti.
Sistema di Riferimento Convenzionale Celeste (SRCC)
E’ definito da:
origine nel baricentro terrestre;
asse Z ortogonale all’Equatore Celeste di Riferimento;
asse X definito dal Punto Equinoziale γ di riferimento,
asse Y tale da completare una terna destrorsa.
Il SRCC viene utilizzato per il calcolo e la descrizione
delle orbite dei satelliti terrestri, come quelli GPS.
Il SRCC non è solidale alla rotazione della Terra,
quindi non è adatto per rappresentare la posizione di punti materializzati sulla sua superficie.
I Sistemi di Riferimento Terrestri
Servono per la georeferenziazione di punti solidali con i moti della Terra. Si distinguono in
SR globali
Definiti e coerenti su scala planetaria, realizzati mediante reti globali di stazioni permanenti
che utilizzano metodi della geodesia satellitare (VLBI, SLR e, di recente, GPS) per stimare
la propria posizione e il proprio spostamento nel tempo.
SR locali
Orientati e definiti su scala locale mediante reti locali, regionali, nazionali
(per l’Italia Roma40), continentali (per l’Europa: ED50) di punti fondamentali planimetrici e
altimetrici, la cui posizione relativa viene stimata mediante misure di angoli, distanze e
dislivelli.
Nota
I SR globali costituiscono, per le metodologie di misura e la precisione delle stime, lo stato
dell’arte. I SR locali hanno valenza storica poiché vennero realizzati prima dell’avvento della
geodesia da satellite, ricorrendo a metodologie di misura e di stima meno precise di quelle
oggi disponibili. Hanno però importanza fondamentale poiché spesso costituiscono il
riferimento ufficiale cartografico per il territorio cui si riferiscono.
Il SR di Riferimento Convenzionale Terrestre
(International Terrestrial Reference System)
L’ITRS è definito da:
origine nel centro di massa
convenzionale della Terra;
asse Z passante per il Polo
Convenzionale Terrestre (BIH 1984);
asse X definito dall’intersezione fra
piano meridiano di riferimento
(piano meridiano passante per il punto
fondamentale di Greenwich, BIH 1984)
e piano equatoriale terrestre (BIH 1984);
asse Y tale da completare la terna
destrorsa.
Le reti di stazioni permanenti per la realizzazione dell’ITRS
Sostanzialmente 3 metodi affini (ma non uguali) di osservazione:
VLBI: Very Long Baseline Interferometry
SLR: Satellite Laser Ranging
GPS: Global Positioning System
realizzati da stazioni di osservazione monumentate in modo stabile,
che operano continuativamente nel tempo.
La rete globale VLBI (International VLBI Service)
http://ivscc.gsfc.nasa.gov/ivs.html
Circa 30 stazioni, realizzate mediante appositi radiotelescopi
Le stazioni effettuano contemporaneamente misure a quasar:
sostanzialmente le osservazioni derivate sono:
angoli di osservazione dalle singole stazioni,
differenze di distanza dai quasar alle stazioni.
La rete globale SLR (International SLR Service)
http://ilrs.gsfc.nasa.gov/
Circa 90 stazioni attive nel pianeta, realizzate mediante cannoni laser orientabili
Le singole stazioni effettuano misure sui tempi di andata e ritorno del fascio laser
dal cannone a satelliti artificiali in orbita geocentrica
Nuovamente un’osservazione derivata di distanza
La rete globale GPS (International GPS Service)
http://igscb.jpl.nasa.gov/
365 stazioni realizzate mediante ricevitori GPS operanti 24 ore su 24 che effettuano
osservazioni di pseudo-distanza ai satelliti della costellazione GPS.
Gli scopi geodetici delle reti globali
Dal 1988 i risultati forniti dalle singole metodologie vengono analizzati congiuntamente
presso lo IERS (International Earth Rotation Service),
http://hpiers.obspm.fr/
sottocommissione di IAG e IAU, i cui scopi sono di determinare
i parametri di orientamento e di rotazione terrestre (EOP)
il Sistema di Riferimento Internazionale Celeste
il Sistema di Riferimento Internazionale Terrestre
le deformazioni in atto sulla crosta terrestre
La realizzazione dell’ITRS: l’ITRF (ITR Frame)
http://lareg.ensg.ign.fr/
Il numero di SP (VLBI, SLR, GPS) aumenta; gli algoritmi di stima si raffinano.
Quindi le stime di ITRF (ovvero i cataloghi) si evolvono; si sono avuti:
ITRF89, …, ITRF97, ITRF2000.
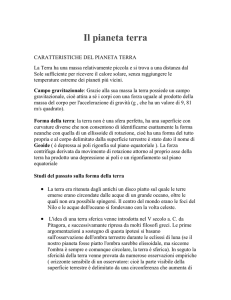
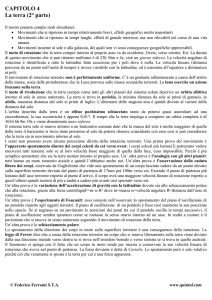
Una realizzazione di ITRS (ITRF)
consiste nel catalogo
delle coordinate delle Stazioni
Permanenti che hanno contribuito
alla soluzione
Nell’immagine, le SP
utilizzate nella soluzione ITRF2000
Per ogni stazione del catalogo vengono stimate e fornite:
& 0 (e σ& 0 )
posizione cartesiana geocentrica X0 (e σ 0 ), velocità annuale X
all’epoca di riferimento per la soluzione t0 .
Posizione e velocità ITRF2000 di alcune stazioni permanenti GPS italiane
(non si riportano i σ di stima)
ITRF2000 STATION POSITIONS AT EPOCH 1997.0 AND VELOCITIES
NOME
X
Y
X
Vx
(m)
(m)
(m)
(m/y)
LAMPEDUSA
LAMP 5073164.888 1134512.425 3683181.032 -.0142
BOLOGNA
MEDI 4461400.895
919593.423 4449504.682 -.0187
GENOVA
GENO 4507892.447
707621.329 4441603.426 -.0165
TORINO I
TORI 4472544.459
601634.192 4492545.112 -.0113
CAGLIARI
CAGL 4893378.933
772649.625 4004182.063 -.0122
MATERA
MATE 4641949.707 1393045.271 4133287.343 -.0188
PADOVA
UPAD 4389531.283
923253.642 4519256.346 -.0174
BOLZANO
BZRG 4312657.614
864634.517 4603844.341 -.0124
PERUGIA
UNPG 4555145.782
997822.263 4337432.551 .0163
Vy
(m/y)
.0185
.0200
.0194
.0193
.0195
.0191
.0188
.0189
.0248
Vz
(m/y)
.0137
.0086
.0092
.0094
.0116
.0131
.0104
.0139
.0399
La stima della posizione della stazione a una generica epoca t ≠ t0 , è data dalla
& 0 ⋅ (t − t 0 ) ,
X (t ) = X 0 + X
σ i2 (t ) = σ i2 + σ& i2 ⋅ (t − t 0 ) 2
0
0
in ITRF97 i σ erano dell’ordine di alcuni mm, in ITRF2000 migliorano,
Rimangono però significativi problemi di coerenza nelle stime,
che implicano la necessità di approfondimenti e miglioramenti dei metodi di stima.
In tabella alcuni confronti fra ITRF97 e ITRF2000 su SP catalogate in ITRF dal 1989.
ITRF1997 (t=2003.25)ITRF2000(t=2003.25)
X [m]
Y [m]
Z [m]
GRASSE
MEDICINA
ZIMMERWALD
0.0221
0.0035
-0.0179
0.0194
0.0044
-0.0131
0.0294
0.0020
-0.0046
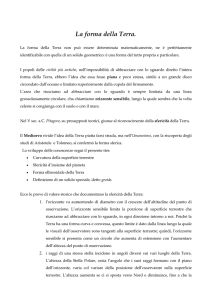
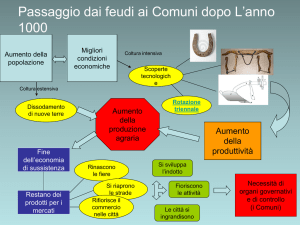
Realizzazioni europea e italiana dell’ITRF: ETRF89 e IGM95
ETRF89 rappresenta la realizzazione europea dell’ITRF89.
La nuova rete geodetica fondamentale italiana,
monumentata e rilevata
dall’Istituto Geografico Militare Italiano (IGMI)
e denominata IGM95,
si compone di circa 1200 caposaldi sul
territorio nazionale le cui coordinate sono
calcolate e monografate in ETRF89:
quindi
ETRF89 è un raffittimento europeo di ITRF89,
IGM95 è un raffittimento nazionale di ETRF89.
Nell’immagine, il quadro d’unione per igm95, dal sito
http://www.nettuno.it/fiera/igmi/igmit.htm
Un altro SR globale: il WGS84
Il SR globale WGS (World Geodetic System) viene sviluppato dal
Defence Mapping Agency (DMA), ora NIMA (National Imagery and Mapping Agency),
a partire dagli anni 60;
E’ formalmente definito come ITRS,
ma è realizzato mediante una rete di stazioni di controllo del NIMA.
Negli ultimi 40 anni anche le realizzazioni del WGS84 si sono evolute in funzione dei dati e
delle informazioni disponibili; attualmente siamo alla realizzazione WGS84(G1150).
Il WGS84 è realizzato con minore precisione dell’ITRF:
la coerenza fra i 2 SR è di alcuni centimetri.
E’ comunque un SR fondamentale, perché è il SR in cui vengono
calcolate e fornite all’utenza le orbite dei satelliti GPS.
Coordinate WGS84(G873) e differenze rispetto alle WGS84(G736) di alcune stazioni di
controllo del NIMA (NIMA, 2003)
Le coordinate geodetiche in un SR 3D: l’ellissoide di riferimento
Nelle applicazioni di posizionamento terrestre occorre una superficie geometrica di
riferimento descritta da pochi parametri che ben approssimi la forma della Terra, rispetto alla
quale sia definibile e utilizzabile in pratica un sistema di coordinate:
l’ellissoide di rotazione
L’ellissoide di rotazione è una figura geometrica che coniuga
semplicità d’uso e consistenza con la forma del pianeta.
L’ellissoide si presta dunque per descrivere
le coordinate planimetriche di punti rispetto alla superficie terrestre.
Definiamo ellissoide di rotazione con centro nell’origine del SR il luogo dei punti X, Y, Z
tali che
X2 +Y2
a
2
+
Z2
b
2
=1
ove
a
b
semiasse maggiore o equatoriale;
semiasse minore o polare.
In funzione dei parametri a e b
si possono definire:
b2
l’eccentricità e = 1 − 2
a
(a − b)
e lo schiacciamento f =
a
Forma e dimensioni di un ellissoide sono determinate dalla scelta dei suoi parametri: in
applicazioni di posizionamento terrestre l’ellissoide viene scelto in modo da approssimare al
meglio il geoide terrestre (vedi oltre); nella storia, con il miglioramento delle stime della
forma del geoide, si sono progressivamente adottati differenti ellissoidi; fra questi
Ellissoide
Internazionale
(Hayford, 1924)
WGS84
GRS80
a (m)
6378388
f
1/297
6378137
6378137
1/298.257223563
1/298.257222101
A titolo di esempio si ricorda che, rispetto all’ellissoide GRS80, il geoide presenta
scostamenti a media nulla e con valori massimi di ≅ 100 m.
Geoide e ellissoide: gli scostamenti sono magnificati di un fattore 1000 per permetterne la
percezione visiva.
Le coordinate geodetiche di un punto P
Dato un SR e il relativo ellissoide associato
le coordinate geodetiche di P sono definite da
ϕ:
λ:
h:
(latitudine geodetica): angolo fra la
normale all’ellissoide passante per P e il piano equatoriale [X,Y];
(longitudine geodetica): angolo antiorario fra il piano meridiano per P
e il piano meridiano origine [X,Z];
(quota ellissoidica)
distanza lungo la normale all’ellissoide fra l’ellissoide stesso e P.
La relazione fra coordinate cartesiane e geodetiche di P è data da
X P = ( N + hP ) cos ϕ P cos λ P
YP = ( N + hP ) cos ϕ P sin λ P
Z P = [ N (1 − e 2 ) + hP ] sin ϕ P
ove N =
a
,
( 1 − e sin ϕ P )
N è definito grannormale (da non confondere con l’ondulazione del geoide).
2
2
Il passaggio [ϕ, λ, h]P → [X, Y, Z]P è immediato; il passaggio inverso richiede qualche
conto, ma è comunque ben definito.
In genere viene svolto in modo iterativo:
⎛Y ⎞
λ = arctan⎜ ⎟
⎝X⎠
per ϕ e h si considera la seguente uguaglianza:
Z
2
X +Y
2
=
N ϕ (1 − e 2 ) + h
Nϕ + h
tan ϕ
alla prima iterazione si trascura la quota, ottenendo
⎛
1 ⎞⎟
Z
a
⎜
, h1 =
, N1 =
ϕ1 = arctan
⎜
⎟
2
2
2
(1 − e sin ϕ1 )
⎝ X 2 + Y 2 1− e ⎠
X2 +Y2
− N1
cos ϕ1
quindi si itera, utilizzando per ogni iterazione
⎛
⎞
Z
Ni −1 + hi −1
a
⎜
⎟, N =
, hi =
ϕi = arctan
i
⎜
2
2
2
2 N (1 − e 2 ) + h ⎟
(1 − e sin ϕ i )
⎝ X +Y
i −1
i −1 ⎠
X2 +Y2
− Ni
cos ϕi
il procedimento si arresta allorché stime successive di ϕ e h non differiscono in modo
significativo.
La trasformazione di Molodensky.
Si è visto come trasformare le coordinate cartesiane di un punto da un SR ad un altro
mediante una rototraslazione con fattore di scala (R.T.c.f.s.). Esiste anche un metodo per il
calcolo diretto della trasformazione delle coordinate geodetiche fra SR (trasformazione di
Molodensky), sempre a 7 parametri, ovvero, anziché la
[ X , Y , Z ]SRI ⇔ RTcfs ⇔ [ X , Y , Z ]SRI
si può usare la
[ϕ, λ, h]SRI ⇔ Molodensky ⇔ [ϕ, λ, h]SRI
Svantaggi
Formulazione più complessa e meno intuitiva (non affrontata in questa sede).
Vantaggi
Viene disgiunta la componente planimetrica [ϕ, λ] da quella altimetrica (h).
Questa necessità è legata alla trasformazione fra SR con quote ellissoidiche e
SR con quote ortometriche (vedi oltre).
Una nota su Sistemi di riferimento e Sistemi di coordinate
Definiti due SR la trasformazione delle coordinate di un punto da uno all’altro è realizzata
mediante una trasformazione fra SR. Tale trasformazione è geometricamente ben definita
qualora si conoscano i parametri di trasformazione, il che, in ambito geodetico, non è sempre
vero: spesso i parametri di trasformazione fra SR sono noti solo con approssimazione e
quindi qualunque trasformazione di SR implica una perdita di precisione delle stime di
posizione.
Definito un SR la posizione di un punto P in quel SR può essere espressa mediante diversi
Sistemi di Coordinate: abbiamo visto le coordinate cartesiane geocentriche e le coordinate
geodetiche. La scelta su quale sistema di coordinate utilizzare è basata su motivi di comodità
interpretativa e computazionale: la trasformazione fra diversi sistemi di coordinate
all’interno di un unico SR è sempre calcolabile esattamente.
Introduzione al geoide: cenni alla struttura e forma della Terra
In prima approssimazione il pianeta può essere considerato composto da diversi strati
concentrici.
Nucleo interno solido: raggio ca. 1225 Km
costituenti: composti di ferro e nikel, ρ ≅ 13 gr / cm 3
Nucleo esterno liquido: spessore ca. 2270 Km
costituenti: composti di ferro e nikel, ρ ≅ 11 gr / cm 3
Mantello inferiore: spessore ca. 2200 Km
costituenti: eterogenei, ρ ≅ 5 gr / cm 3
Mantello superiore: spessore ca. 645 Km
costituenti: silicati di magnesio, ρ ≅ 3.5 gr / cm 3
Crosta: spessore ca. 30 Km (variabile da 5 a 60 Km)
costituenti: stratificato, ρ ≅ 2.8 gr / cm 3
Al di là di questa categorizzazione elementare la struttura interna di ogni strato presenta
significative eterogeneità laterali:
Il campo di gravità terrestre, e le relative superfici equipotenziali non hanno simmetria
semplice nello spazio.
Il geoide
La forza gravitazionale generata da una massa M puntiforme su un corpo di massa unitaria
posto a distanza r è data dalla
F = −G
M
r
3
r
ove G è la costante di gravitazione universale, G = 66.7 ⋅10 −9 cm 3 g −1 sec − 2 .
Alla forza gravitazionale è possibile associare un potenziale (potenziale gravitazionale)
V =G
M
r
tale per cui
⎡ ∂V ∂V ∂V ⎤
F = gradV = ⎢ ,
, ⎥
⎣ ∂X ∂Y ∂Z ⎦
Caso Terrestre: corpo esteso e disomogeneo, in rotazione
Il potenziale gravitazionale che la Terra esercita in un punto P è dato dall’integrale esteso a
tutta la distribuzione di massa del pianeta
dm(Q)
Terra rPQ
V (P) = G ∫∫∫
Si consideri inoltre il moto di rotazione, supponendo che avvenga intorno all’asse Z con
velocità angolare costante ω. Alla forza gravitazionale si aggiunge la forza centrifuga che, in
un punto P = [ X , Y , Z ] solidale al moto di rotazione, è data da
⎡X ⎤
f = ω2 ⎢ Y ⎥
⎢ ⎥
⎣⎢ 0 ⎥⎦
Anche alla forza centrifuga si può associare un potenziale
ω2 2
Φ( X ,Y , Z ) =
(X + Y 2)
2
Si consideri ora la somma delle forze agenti su un punto, dovute alla gravitazione del pianeta
e alla rotazione del SR; si consideri la somma dei potenziali associati a tali forze:
W ( X ,Y , Z ) = V ( X ,Y , Z ) + Φ( X ,Y , Z )
W prende il nome di potenziale di gravità terrestre;
il suo gradiente g = grad (W ) è definito forza di gravità terrestre;
le unità di misura usualmente adottate in geodesia per g = g sono
cm
il gal, 1 gal = 1 2 e il mgal, 1 mgal = 10 −3 gal .
s
Le superfici equipotenziali per W e il geoide
Si considera il potenziale di gravità W(X,Y,Z). Dato uno spostamento infinitesimale dX
( dX = [ dX , dY , dZ ]T ) nello spazio si ha sempre
dW (dX) = gradW ⋅ dX = g ⋅ dX
Si consideri ora la generica superficie equipotenziale per W, ovvero la superficie di
equazione
W ( X , Y , Z ) = W0 = cost
per uno spostamento dX sulla superficie W = W0
si ha dW (dXW 0 ) = 0 ; quindi g ⊥ dXW 0 ovvero
g ⊥ W0 ( X , Y , Z )
ovvero una superficie equipotenziale di gravità è ortogonale in ogni suo punto
alla forza di gravità stessa.
Evidentemente, considerata la forza di gravità terrestre,
esistono infinite superfici equipotenziali, in funzione della scelta del valore W0.
Quella particolare superficie equipotenziale passante per un insieme di
punti definenti il livello medio dei mari è definita geoide.
La Terra è un corpo disomogeneo e di forma solo approssimatamente simmetrica; quindi la
superficie del geoide, pur essendo abbastanza liscia, è irregolare e non descrivibile mediante
semplici funzioni analitiche: si ricorre in genere a sviluppi in armoniche sferiche.
Si definisce ondulazione del geoide N(ϕ,λ) rispetto a un ellissoide di riferimento nel punto
di coordinate geodetiche (ϕ, λ) lo scostamento del geoide rispetto all’ellissoide.
Dato un ellissoide di rotazione, i cui parametri di forma siano scelti opportunamente, lo
scostamento massimo fra geoide e tale ellissoide è di 100 m
Nota
Il geoide non coincide mai con il livello istantaneo degli oceani:
su di essi infatti, oltre alla forza di gravità terrestre , agiscono continuamente
altre forze perturbative, periodiche (maree) e non (correnti oceaniche);
si può però affermare che, il geoide coincide con la superficie ideale che
assumerebbero gli oceani se su di essi agisse solo la forza di gravità terrestre
e se essi potessero prolungarsi sotto le terre emerse.
Ondulazione del geoide secondo il modello globale EGM96, dal sito:
http://cddisa.gsfc.nasa.gov/926/egm96/egm96.html
Le stime di geoide globali e locali
La conoscenza di N (e di altri funzionali del potenziale di gravità) può essere fornita tramite
stime (modelli) globali e stime (modelli) locali.
Stime/modelli globali (per l’intero pianeta):
vengono determinate facendo uso di dati derivati da misure a terra e da satellite per l’intero
pianeta. Hanno validità globale e sono riferite ad un ellissoide geocentrico (generalmente il
GRS80). Sono tipicamente disponibili liberamente e hanno precisioni circa metriche.
Stime/modelli locali (per una regione limitata):
vengono determinate a partire da dati ricoprenti un certo territorio di interesse,
tipicamente a scala continentale o nazionale:
hanno ambito limitato, ovvero il territorio cui si riferiscono i dati,
ma sono in genere più accurate delle stime globali.
Un esempio di modello globale
La maschera di calcolo di N secondo il modello globale EGM96,
presso il sito WEB del NIMA.
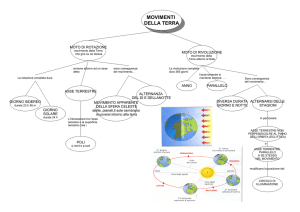
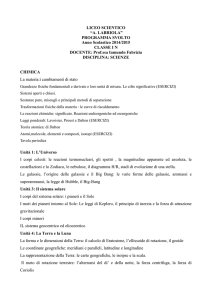
Modelli locali: il modello ITALGEO per l’Italia
ITALGEO è il modello locale ufficiale per l’Italia.
Viene stimato e periodicamente aggiornato dal DIIAR del Politecnico di Milano,
su convenzione per l’IGMI, che ne cura la distribuzione al pubblico.
La stima più recente è ITALGEO99.
Le ondulazioni N sono stimate e memorizzate
per i nodi di una griglia regolare in ϕ e λ (con
passo di 2' x 2') e sono riferite all’ellissoide
GRS80. Per un generico punto del territorio la
stima può essere ricavata (mediante
interpolazione non banale) a partire dalle stime
nei nodi circostanti il punto.
La precisione è decimetrica in assoluto,
di circa 1 parte per milione (ppm) in relativo.
In figura, ondulazione del geoide secondo il
modello ITALGEO95 (Barzaghi et al., 1995)
I SR locali
Tipicamente si vincola il SR vincolando l’ellissoide di riferimento, senza definire assi e
coordinate cartesiane: si impone la forma (a, b) per l’ellissoide di riferimento; quindi si
impongono 6 condizioni per vincolare l’ellissoide:
Orientamento locale
si considera un punto fondamentale P e si impone che
in tale punto lo scostamento fra normale all’ellissoide
e normale al geoide (deviazione della verticale) sia
annullato
(2 vincoli di traslazione e 2 di rotazione);
si impone che la quota ellissoidica sia uguale alla
quota ortometrica (1 vincolo di traslazione).
l’ultimo vincolo di rotazione viene imposto fissando la rotazione attorno alla normale in P;
ad esempio imponendo l’azimut A da P a un secondo punto Q:
A(PQ)geodetico= A(PQ)astronomico
SR locale italiano: Roma40
Sistema di Riferimento Nazionale Italiano
fondamentale per la cartografia nazionale
Ellissoide: internazionale (Hayford)
Orientamento locale,
nel punto fondamentale di Roma M.Mario
con imposizione dell’azimut con il punto di M. Soratte.
Realizzazione e disseminazione:
rete di triangolazione fondamentale I.G.M.
(compensazione a blocchi 1908-1919)
e reti di raffittimento.