Insegnamento
di
Fondamenti di Infrastrutture viarie
Territorio ed infrastrutture di trasporto
La meccanica della locomozione: questioni generali
Il fenomeno dell’aderenza e l’equazione generale del moto
Dall’equazione generale del moto alle caratteristiche di moto
Sistemi di trazione e motori di trazione
Trazione ferroviaria: studio di una fase completa di moto
Trazione stradale: studio di una fase completa di moto
La frenatura in ferrovia e su strada
Legislazione e Normativa
Norme funzionali e geometriche per la costruzione delle strade
Andamento planimetrico di un tracciato stradale:
1) elementi del tracciato planimetrico, rettifili e curve circolari,
pendenza trasversale in curva, curve a raggio variabile
2) allargamento in curva e diagramma di velocità
Distanze di visibilità e andamento altimetrico di un tracciato stradale
Volume del solido stradale: metodi di calcolo
Fondamenti di infrastrutture viarie
SISTEMI DI TRAZIONE E MOTORI DI TRAZIONE
Un sistema di trazione in generale fa riferimento al tipo di motore di
trazione utilizzato o dal veicolo stradale o dal mezzo di trazione ferroviario.
In realtà i diversi sistemi di trazione possono essere associati alle diverse
infrastruttura di trasporto.
Inizialmente in ferrovia la trazione a vapore era la sola utilizzata,
successivamente si utilizzò anche la trazione elettrica, diesel e dieselelettrica. La sola trazione elettrica richiede impianti di alimentazione
(sottostazioni e linea aerea). Quando invece l’energia è prodotta a bordo del
mezzo di trazione si parla di trazione diesel-elettrica.
La trazione stradale utilizza motori a combustione interna (a benzina, a
gasolio, a benzina-GPL e a benzina-metano); recentemente vengono anche
utilizzati motori ibridi (a combustione interna-elettrici) e motori innovativi
(elettrici, ad idrogeno, ecc.).
Sistemi di trazione e motori di trazione
SISTEMI DI TRAZIONE
Con riferimento al tipo d’infrastruttura distinguiamo la trazione ferroviaria
dalla trazione stradale.
Infrastruttura ferroviaria
Se la trazione ferroviaria é legata ad una fonte energetica secondaria
(elettricità che in quanto tale deve essere prodotta in centrali idroelettriche,
termoelettriche, a gas, a carbone, nucleari), si parla di trazione elettrica.
Sono quindi necessari: linee di trasporto dell’energia elettrica ad alta tensione
dalle centrali elettriche agli impianti di trasformazione (della tensione) e di
conversione (della corrente o della frequenza) e linee aeree di captazione per
alimentare i mezzi di trazione.
Se invece la trazione ferroviaria è legata ad una fonte energetica primaria si
parla di trazione a vapore (se la fonte energetica è il carbone), trazione
diesel o diesel-elettrica (se la fonte energetica è il gasolio).
Infrastruttura stradale
Solitamente la trazione stradale è legata ad una fonte energetica primaria
(benzina o gasolio, ma anche GPL e metano). In alcuni casi tranvie e filovie
urbane in sede promiscua la trazione stradale è legata ad una fonte energetica
secondaria e quindi, come per le ferrovie, è necessario disporre di specifici
impianti elettrici fissi.
Sistemi di trazione e motori di trazione
MOTORI DI TRAZIONE
Si definisce motore ideale per la trazione trazione un motore a potenza costante. La
potenza meccanica P del motore ideale di trazione alle ruote è data da:
P [kW ] = Ft [kN] x v [m/sec]
L‘andamento quindi della caratteristica meccanica del motore ideale, in una
rappresentazione F(v), è quello tipico di un’iperbole equilatera.
Il motore ideale per la trazione è tale in quanto il motore si autoregola (cioè ha un
comportamento stabile):
• alle basse velocità infatti è richiesto il massimo sforzo di trazione;
• all’aumentare della velocità lo sforzo di trazione richiesto deve diminuire.
Quindi la sua caratteristica meccanica è solo teorica.
Le caratteristiche meccaniche dei motori di trazione reali si avvicinano a tre
caratteristiche meccaniche teoriche tipo:
• “potenza costante”: motori elettrici monofasi (sia corrente continua che a corrente
alternata) e motori a vapore.
• “velocità costante”: motori elettrici trifasi (a corrente alternata)
• “coppia costante”: motori endotermici (a benzina o diesel)
Pertanto solo i motori la cui caratteristica meccanica si avvicina a quella a potenza
costante sono adatti alla trazione. Per gli altri occorre trasformare la caratteristica
meccanica propria per avvicinarla il più possibile a quella ideale.
Motori di trazione
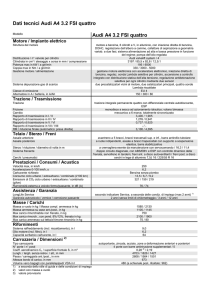
Caratteristiche meccaniche
La caratteristica meccanica del motore ideale, in una rappresentazione F(v), è
un’iperbole equilatera. In figura sono riportate le caratteristiche meccaniche dei
kN
motori di trazione.
Legenda:
•
•
•
•
•
•
I
II
III
IV
V
VI
motore ideale
a vapore
elettrico c.c.
elettrico c.a. monofase
elettrico c.a. trifase
a combustione interna
1020 CV
750 kW
A
[ 1 CV sono 735,5 W
1 kW sono 1,36 CV ]
In A: P = (45 x 60) / 3.6 = 750 kW
cioè 750 x 1.36 = 1020 CV
[ N. B. 1 HP = 1,91 CV ]
Km/h
Motori di trazione
Motori elettrici
Sono utilizzati sui mezzi di trazione elettrici ferroviari, sui tram e sui filobus.
Il tipo più utilizzato in passato, ma ancora oggi, era ed é il motore elettrico a c.c.
eccitato in serie che presenta una caratteristica meccanica del tipo “potenza costante”
molto simile a quella del motore ideale.
Presenta un numero di giri n, direttamente proporzionale alla tensione di alimentazione
E ed inversamente proporzionale al flusso induttore Ø, è dato da: n = E / k Ø e dove il
flusso induttore Ø dipende dal n° delle spire del circuito d’eccitazione e dalla corrente i
assorbita. La sua potenza motrice Pm è data da: P = e . i [ W ], dove e la sua f.c.e. che è
data da: e = E - r . i [ V ] ed i [ A ] è la corrente assorbita. La potenza alle ruote Pr è
data da: Pr = η k n Ø i, ma anche da: Pr = Cr ω = Cr 2 π n.
E’ possibile quindi ricavare la coppia alle ruote che è data da:
Cr = (η k / 2 π) Ø i [ N m ]
Esistono poi altri due tipi di motori elettrici: il motore monofase a c.a. (la cui
caratteristica meccanica, del tipo “potenza costante”, è quasi coincidente con quella del
motore ideale) ed il motore trifase (che, con l’avvento dell’elettronica di potenza, ha
potuto essere riutilizzato come motore di trazione).
Motori di trazione
Motori a combustione interna (a scoppio)
Sono motori che, per poter essere utilizzati per la trazione di veicoli, devono essere
accoppiati a variatori di coppia per poter adattare la loro caratteristica meccanica
(poco adatta alla trazione) avvicinandola il più possibile a quella del motore ideale.
La potenza motrice Pm per un motore a quattro tempi, è data da:
Pm = 0,87 η N V pm n
(il doppio se il motore fosse a due tempi)
dove:
0,87 = costante dimensionale
η = rendimento organico del motore
N = n° dei cilindri
V = volume di un cilindro
Pm = pressione media del ciclo
n = n° di giri al m.p.
La coppia motrice Cm è direttamente proporzionale alla potenza motrice Pm
ed inversamente proporzionale alla velocità angolare ω.