Affidabilità
Metodi di analisi affidabilistica
Introduzione
• Nella lezione precedente abbiamo introdotto il metodo
RBD (reliability block diagram) per la stima
dell’affidabilità di un sistema
• Altri metodi di analisi sono disponibili
• Fault Tree Analysis: conveniente per la modellazione
gerarchica della concatenazione dei guasti che causano
un malfunzionamento
• Markov Chains: conveniente per la modellazione della
evoluzione temporale di sistemi complessi
Fault Tree Analysis
• Si basa su una modellazione degli eventi che
portano all’evento catastrofico tramite simboli
logici (come porte logiche)
• Si concatenano eventi intermedi per portare
all’evento catastrofico.
• Obiettivo è la correlazione delle varie cause
che portano a uno specifico evento non voluto
• È possibile associare probabilità numeriche
agli eventi per calcolare la probabilità
dell’evento non voluto
Fault Tree Analysis
Assunzioni: • Sistemi non riparabili • Processo Markoviano ovvero la probabilità dello stato successivo dipende solo dallo stato a:uale e non da quelli preceden< • Bernoulli ovvero gli sta< analizza< di ogni parte del sistema sono due e tra loro indipenden< (acceso/spento; ro:o funzionante; etc.) Simboli
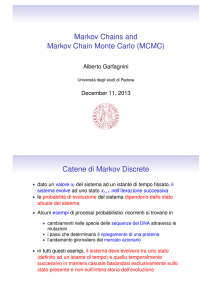
• Simboli logici: – Evento causato: • Finale indesiderato in cima all’albero • Intermedio causato da even< preceden< – Porta OR • Ciascun evento in input deve essere necessario e sufficiente a causare l’evento in uscita Simboli
• Simboli logici: – Porta AND • TuN gli even< in input devono essere necessari e sufficien< a causare l’evento in uscita – Evento basilare: • Evento non sviluppato oltre nell’albero • Anche de:o “foglia” “iniziatore” • Definisce la risoluzione dell’albero Passi per la costruzione di un albero Evento indesiderato
connessione contributi (AND)
Evento intermedio
Evento intermedio
connessione
contributi (OR)
Eventi basilari
Prosegue fino a
eventi basilari
• Si comincia iden<ficando l’evento indesiderato • Connessioni logiche solo tra even0 • Si prosegue fino agli even< basilari e/o di cui non si vuole analizzare ulteriormente Calcolo R e PF
• Si può associare una probabilità di fail PF all’evento indesiderato. • Relazione tra reliability R e PF – R + PF = 1 • Caso di failure rate λ costante – Parte centrale della curva bathtub – R= e-­‐λ*T • Si può assumere λ*T <<1 (T<0.2 MTTF) – T: tempo di esposizione – Si può assumere che PF=λ*T – Con un errore di meno del 2% Calcolo R e PF
• Porta OR – Il guasto di almeno uno dei due (o più) componen< che afferiscono alla porta causa un guasto in uscita – RT=RARB • PF = 1 -­‐ RT • PF = 1 -­‐ (RARB) • PF = 1-­‐ [(1-­‐PA)(1-­‐PB)] – PF = PA+PB – PAPB • Con approssimazione che la probabilità dell’intersezione sia bassa (PA,B ≤ 0,2) ovvero che gli even< siano rari si può approssimare – PF ≅ PA+PB • Con errore ≤ 11% Calcolo R e PF
• Porta AND – Il guasto di tuN e due (o più) componen< che afferiscono alla porta causa un guasto in uscita – RT=RA + RB – RARB (da 1-­‐ [(1-­‐RA)(1-­‐RB)] ) • PF = 1 -­‐ RT • PF = 1 -­‐ (RA + RB – RARB) • PF = 1-­‐ [(1-­‐PA)+(1-­‐PB)-­‐(1-­‐PA)(1-­‐PB)] – PF = PAPB Sistema Serie
A
B
C
Rappresentazione con Reliability Block Diagram
• Sistema Serie: il guasto di un modulo causa la ro:ura del sistema • PF = PA+ PB + PC – PAPB – PAPC – PcPB -­‐ PAPBPC FAIL • Approssimazione even< rari: A B C Rappresentazione con Fault Tree Analysis
• PF ≅ PA+ PB + PC • R = 1-­‐ PF Sistema Parallelo
A B C Rappresentazione con Reliability Block Diagram
• Sistema Parallelo: il guasto di tuN moduli causa la ro:ura del sistema FAIL • PF = PAPBPC A B C Rappresentazione con Fault Tree Analysis
• R = 1-­‐ PF Esempio
FAIL B
A
C
B
Rappresentazione con Reliability Block Diagram
• Concatenazione di porta AND e porta OR tramite l’evento intermedio FAIL B A B FAIL B C B Rappresentazione con Fault Tree Analysis
Esempio cont.
Soluzione con RBD
Rsys = RA "#1− (1− RB )2 $% RC = RA (2RB − RB2 )RC
Soluzione con FTA
Rsys= 1- PF = 1- ( PA+Pc + PBPB)
= 1- [(1-RA) + (1-RC) + (1-RB)2]
= RA + RC + 2(RB-1) -RB2
Esempio cont.
• La approssimazione vale per evento raro,
le singole PF sono <<1
• L’effetto dell’approssimazione è di fare una
reliability peggiore di quella effettiva (non
considero termini che si sottraggono a PF)
• Si può anche usare la approssimazione di
– PF= 1- e-λ*T
– Con λ*T <<1 (T<0.2 MTTF)
– PF=λ*T
Esempio cont.
• Calcolo dell’en<tà dell’approssimazione con • PFA=λa*T= 0,1 • PFB=λb*T=0,15 • PFC=λc*T=0,12 • Valore esa:o – Rsys= RA*(2RB-­‐RB2)*RC= e-­‐λa*T(2e-­‐λb*T-­‐e-­‐2λb*T)e-­‐λc*T=0.7869 • Valore approssimato – Rsys=1-­‐( PA+Pc+PBPB)=1-­‐(λa*T+λb*T+λaλb*T2)=0,7575 • Errore di approssimazione ~-­‐3,74% Processo di Markov
• Le catene di Markov o Markov Chains sono un
modo di rappresentare l’evoluzione probabilistica
di un sistema attraverso vari stati nel tempo.
• Rappresentazione di un processo stocastico
detto Processo di Markov
• Un processo stocastico è una funzione i cui
valori sono variabili aleatorie
• Un processo di Markov è un processo stocastico
detto “senza memoria” ovvero in cui il futuro ed il
processo è definito solo dal presente e non dal
passato
Markov Chain
• Se gli stati in cui il processo di Markov può trovarsi è
un numero finito si ha una Markov Chain
• Dati n stati ad un tempo t si hanno n variabili aleatorie
a cui si associa un vettore probabilità P(t) ad n
elementi tale che
– Σi pi(t)=1
• Il sistema è sempre in uno sola degli n stati
• La somma delle probabilità di essere nello stato i e di
lasciare lo stato i è sempre = 1
• Il modello Markov cattura il comportamento in un
piccolo intervallo di tempo Δt
Markov Chain
• Nel caso della modellazione affidabilistica gli stati di una
Markov chain rappresentano lo stato di guasto del sistema
(numero di moduli guasti)
• Si assume il sistema funzionante al tempo t.
• La probabilità di un guasto dopo il tempo (t+Δt)=F (t+Δt) è:
• F ( t + Δt) = 1 - e-λ Δt
• L’affidabilità a t+Δt è
• e-λ Δt = 1 + (-λ Δt) + (-λ Δt)2/2! + …
• E quindi la probabilità di guasto 1-R
• 1 - e-λ Δt = (λ Δt) + (λ Δt)2/2! + …
• Per piccoli Δt à (-λ Δt)2/2! può essere ignorato e allora la
probabilità di guasto
• F (t+Δt) = 1- e-λ Δt ≈ λ Δt
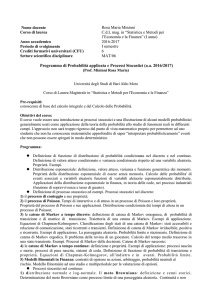
Rappresentazione della Markov chain : sistema parallelo 1- λΔt
10 1- 2λΔt
• Ogni stato rappresenta una possibile configurazione del sistema λΔt
λΔt
11 λΔt
00 01 λΔt
1- λΔt
1
– 1 modulo funzionante – 0 modulo ro:o • Ad ogni ramo è associata la pij
• La probabilità di di
rimanere sullo stesso stato
– pii = 1- Σj pij
• Lo stato 00 non ha uscita
ed è detto stato
assorbente Rappresentazione della Markov chain : sistema parallelo collassato • Gli sta< 10 e 01 sono equivalen< e possono essere raggruppa< 1- λΔt
1- 2λΔt
2λΔt
11 10
01 λΔt
00 1
• I rate che vanno verso
stati equivalenti vengono
sommati
• Semplifica la trattazione
di sistemi complessi
Matrice di transizione
• Una volta o:enuta la Markov Chain si può ricavare un matrice di transizione. • Processo di Markov: la probabilità di essere in uno stato j a t+Δt dipende da:
– Probabilità di essere in uno stato (i) da cui si può
transire allo stato j
– Probabilità di transizione da i a j pij
• Esempio precedente (00 =1 01/10 =2 11=3) – p3(t+Δt)= (1-­‐ 2λΔt)p3(t)
– p2(t+Δt)= 2λΔtp3(t) + (1-­‐ λΔt) p2(t)
– p1(t+Δt)= λΔtp2(t)+p1(t)
Matrice di transizione
• Il sistema equazioni precedenti si può
scrivere in forma matriciale:
" p (t+Δt) % "
$ 3
' $ 1− 2 λΔt
$ p 2 (t+Δt) ' = $ 2 λΔt
$
' $
0
p
(t+Δt)
$# 1
'& #
P(t+Δt)
0
1− λΔt
λΔt
A
• In forma compatta:
– P(t+Δt)=A P(t)
0
0
1
% " p3 (t) %
'
' $
' • $ p 2 (t) '
' $ p (t) '
& $# 1
'&
P(t)
Matrice di transizione
• Per t=0 P(0) è la probabilità dello stato iniziale – P(Δt)=A P(0)
– P(2Δt)=A P(Δt)= A2 P(0) – … – P(nΔt)=An P(0)
• Dalla matrice di transizione e dalla probabilità
dello stato iniziale si può ricavare lo stato a un
tempo nΔt
• La reliability è la somma delle probabilità di
essere in stati funzionanti (2 e 3) o
alternativamente è 1 meno la probabilità di
essere in uno stato di guasto (1) Equazioni in forma chiusa
•
•
Dalla forma matriciale si possono anche ricavare le equazioni in forma chiusa.
Soluzione del sistema per le tre variabili:
•
Risolvendo per creare i differenziali:
– p3(t+Δt)= (1-­‐ 2λΔt)p3(t)
– p2(t+Δt)= 2λΔtp3(t) + (1-­‐ λΔt) p2(t)
– p1(t+Δt)= λΔtp2(t)+p1(t)
– [p3(t+Δt) - p3(t)]/Δt = -­‐ 2λp3(t)
– [p2(t+Δt) – p2(t)]/Δt = 2λp3(t) - λp2(t)
– [p1(t+Δt) – p1(t)]/Δt = λp2(t)
• Che per Δt à 0 si risolve come equazioni differenziali in forma
chiusa che sono le stesse ricavate dal calcolo con RBD
– p3(t) = e-­‐2λt
– p2(t) = 2e-­‐λt-2e-­‐2λt
– p1(t) = 1- 2e-­‐λt+e-­‐2λt
• R(t) = p3(t)+p2(t) oppure R(t) = 1- p1(t)
Valutazione Availability
• Finora abbiamo visto Markov Chain
acicliche ovvero il sistema tende a uno
stato assorbente di guasto.
• Se un sistema prevede anche la
riparazione la Markov Chain che lo
rappresenta è detta ciclica
• La frequenza di riparazione µ è analoga
al failure rate
Valutazione Availability
• Esempio a 2 sta< – G: il sistema funziona – F : il sistema è guasto λΔt
1- λΔt
G • La Markov Chain è ciclica F µΔt
1- µΔt
– Probabilità di riparazione nel tempo Δt è μΔt
• Valutazione Availability
" p (t+Δt) % " 1− λΔt
µΔt
G
$
'=$
$# p F (t+Δt) '& $# λΔt 1− µΔt
•
•
•
•
•
%" p (t) %
'
'$ G
'&$# p F (t) '&
La Markov chain precedente ha questa rappresentazione matriciale In forma di sistema di equazioni differenziali: – dpF(t)/dt= λpG(t)– μpF(t) – dpG(t)/dt= -­‐ λpG(t) + μpF(t) La cui soluzione – pG(t) = μ/(μ+λ) + λ/(μ+λ) e-­‐(λ+μ)t
– pF(t) = λ/(μ+λ) + λ/(μ+λ) e-­‐(λ+μ)t
La Availability è la probabilità di essere in uno stato funzionante per
t à ∞ e quindi:
– A= pG(t à ∞)= = μ/(μ+λ) Che è lo stesso risultato trovato in precedenza
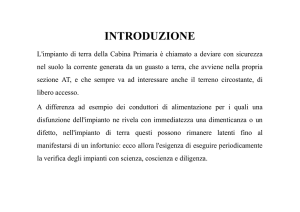
Valutazione Availability:Esempio
• Simulazione (Octave) del sistema con riparazione – μ=0,1 – λ=0,05 • Availability deve tendere a 0,1/(0,1+0,05)=0,666 • Grafico della availability per tà ∞ tende a
0,666