Guida al Laboratorio
di Fisica per Scienze Naturali
Lorenzo Zaninetti
[email protected]
Dipartimento di Fisica Generale
Edizione III
5 maggio 2016
ii
Introduzione
Queste note vogliono essere un compendio alla fisica connessa con le
esperienze del Laboratorio per Scienze Naturali. Si ringrazia Silvia
Alessio che ha fornito nell’ aa 2002/2003 alcune note sull’ esperienze
della distanza focale e del reticolo di diffrazione.
iii
CAPITOLO 0. INTRODUZIONE
iv
Indice
Introduzione
iii
1 Probabilità e statistica
1.1 Momenti . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2 Retta . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1
1
2
2 Misure di lunghezze
2.1 Uso del nonio . . . . . . . . . . . . . . . . . . . . . . . .
5
5
3 La molla
9
3.1 Molle multiple . . . . . . . . . . . . . . . . . . . . . . . . 11
3.1.1 Molle in parallelo . . . . . . . . . . . . . . . . . . 11
3.1.2 Molle in serie . . . . . . . . . . . . . . . . . . . . 13
4 Pendolo Semplice
15
5 Velocita limite
5.1 Stokes . . . . . . .
5.2 Eqn. diff. Stokes .
5.3 Esecuzione Stokes .
5.4 Newton . . . . . .
5.5 Eqn. diff. Newton
.
.
.
.
.
19
19
20
22
23
23
.
.
.
.
.
.
25
26
27
29
30
30
32
A Unità di misura
A.1 I sistemi mks . .
A.2 Il sistema cgs . .
A.3 Nota sulla caloria
A.4 Il sistema tecnico
A.5 Il sistema SI . . .
A.6 Prefissi nel SI . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
v
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
INDICE
INDICE
B
Dati
35
B.1 Costanti . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
B.2 Tabelle . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
C Matematica
C.1 Derivate . . . . . . . . . . . . . . . . . . . .
C.1.1 Polinomi e potenze . . . . . . . . . .
C.1.2 Esponenziali e funzioni logaritmiche .
C.1.3 Funzioni trigonometriche . . . . . . .
C.1.4 Funzioni Iperboliche . . . . . . . . .
C.1.5 Altre Funzioni . . . . . . . . . . . . .
C.2 Integrali indefiniti . . . . . . . . . . . . . . .
C.2.1 Polinomi e potenze . . . . . . . . . .
C.2.2 Funzioni esponenziali e logaritmiche .
C.2.3 Funzioni Trigonometriche . . . . . .
C.2.4 Funzioni Iperboliche . . . . . . . . .
C.2.5 Funzioni cicliche . . . . . . . . . . .
C.2.6 Radici Quadrate . . . . . . . . . . .
C.3 Integrali generalizzati . . . . . . . . . . . . .
C.4 Taylor . . . . . . . . . . . . . . . . . . . . .
C.5 Trigometria . . . . . . . . . . . . . . . . . .
C.5.1 Triangolo retto -Definizioni . . . . . .
C.5.2 Formule ridotte . . . . . . . . . . . .
C.5.3 Identità . . . . . . . . . . . . . . . .
C.5.4 Somme e Differenze . . . . . . . . . .
C.5.5 Angolo doppio e metà . . . . . . . .
C.5.6 Altre formule . . . . . . . . . . . . .
C.5.7 Cambiamenti . . . . . . . . . . . . .
C.5.8 Funzioni trigometriche inverse . . . .
C.6 Alfabeto greco . . . . . . . . . . . . . . . . .
vi
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
39
39
39
40
40
41
41
42
42
42
43
43
44
44
45
47
47
47
47
48
48
48
49
49
50
51
Capitolo 1
Probabilità e statistica
1.1
Momenti
Se gli elementi di un campione hanno la tendenza a raggrupparsi attorno
ad un valore particolare può essere utile rappresentare l’ insieme da
pochi numeri che sono i momenti; il più importante è il valor medio,
N
1 X
xj
x=
N j=1
,
(1.1)
che stima il valore centrale. Un altro importante valore è la varianza
empirica
N
1 X
2
s =
(xj − x)2 ,
(1.2)
N − 1 j=1
collegata ovviamente alla deviazione standard empirica
√
s = s2 .
(1.3)
In alcuni casi, tipo distribuzione di Lorentz, la deviazione standard non
esiste perchè tende ad infinito; bisogna allora ricorrere ad uno stimatore
più robusto che è la deviazione assoluta
N
1 X
|xj − x| .
ADEV (x1 .......xN ) =
N j=1
(1.4)
Questa definizione è stata poco adoperata dagli statistici per il fatto
che essendo un valore assoluto i teoremi sono difficilmente provabili.
1
1.2. RETTA
CAPITOLO 1. PROBABILITÀ E STATISTICA
Abbiamo poi i momenti di ordine superiore che sono in realtà poco
usati; sono in genere numeri adimensionali mentre ricordiamo che il valor medio e deviazione standard empirica sono dimensionali. Abbiamo
quindi che la asimmetria è cosı̀ definita
N
1 Xh x j − x i 3
skew(x1 ....xN ) =
N j=1
s
,
(1.5)
dove s è la deviazione standard empirica. Un valore positivo della
asimmetria significa che abbiamo una coda che si estende verso i valori positivi e negativo viceversa. Un altro parametro importante è la
curtosi
N h
n1 X
xj − x i4 o
Kurt(x1 ....xN ) =
−3 .
(1.6)
N j=1
s
Ricordiamo che questo parametro nel caso di una distribuzione Gaussiana vale 0. Una maniera per calcolare la varianza che minimizza gli
errori di arrotondamento è l’ algoritmo a due passi: prima il calcolo di
x e poi quello di s2
N
N
i2 o
1 hX
1 nX
2
.
(xj − x) −
(xj − x)
s (x1 ....xN ) =
N − 1 j=1
N j=1
2
(1.7)
La seconda somma è zero nel caso in cui x è esatto altrimenti corregge
gli errori di arrotondamento del primo termine.
1.2
Retta
Qui si illustra come, date due serie di datix ey e l’ errore relativo alla
variabile y ,al fine di stabilire eventuali relazioni di tipo lineare tra di
esse, vengono calcolati:
1. valor medio:
N
1 X
xi
x̄ =
N i=1
N
1 X
yi
ȳ =
N i=1
2
(1.8)
(1.9)
CAPITOLO 1. PROBABILITÀ E STATISTICA
1.2. RETTA
2. deviazione standard:
v
u
u
sx = t
v
u
u
sy = t
N
1 X
(xi − x̄)2
N − 1 i=1
(1.10)
N
1 X
(yi − ȳ)2
N − 1 i=1
(1.11)
3. coefficienti della retta di regressione (coef. angolare b e intercetta
a):
PN
(xi − x̄)(yi − ȳ)
b = i=1
(1.12)
PN
2
(x
−
x̄)
i
i=1
a = ȳ − bx̄
(1.13)
4. errore sui coefficienti
error(b) =
error(a) =
sP
N
i=1 (yi
s P
N
− a − bxi )2
P
2
(N − 2) N
i=1 (xi − x̄)
i=1 (yi
(1.14)
− a − bxi )2 1
x̄2
(1.15)
+ PN
2
(N − 2)
N
(x
−
x̄)
i=1 i
5. coefficiente di correlazione r di Pearson
PN
(xi − x̄)(yi − ȳ)
r = qP i=1
PN
N
2
2
i=1 (xi − x̄)
i=1 (yi − ȳ)
(1.16)
6. Valore di χ2
N
X
(yi − a − bxi ) 2
χ (a, b) =
σi
i=1
2
3
(1.17)
1.2. RETTA
CAPITOLO 1. PROBABILITÀ E STATISTICA
4
Capitolo 2
Misure di lunghezze
In questa sezione ci occuperemo della più semplice delle esperienze:
misurare delle lunghezze con un calibro. Prima però dobbiamo capire
come funziona il nonio.
2.1
Uso del nonio
Nell’ apprezzare la posizione di un indice scorrevole lungo una scala
graduata, come accade misurando uno spessore con un calibro, avviene
quasi sempre che l’ indice indichi una posizione intermedia fra due tratti
incisi sulla scala e quindi si debba valutare una frazione dell’ intervallo
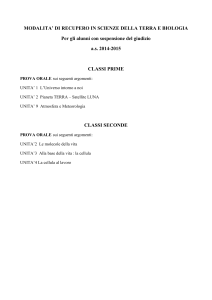
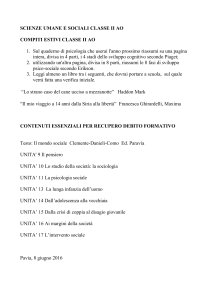
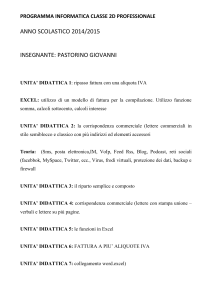
minimo della graduazione. Nell’ esempio della figura 2.1, l’ indice I
inciso sulla parte scorrevole NN indica una posizione fra il tratto 26
ed il tratto 27 della scala S ed occorre valutare la distanza x fra il
tratto 26 e l’ indice I . A tale scopo sulla parte scorrevole NN è incisa
una graduazione ausiliaria che costituisce propriamente il nonio ( da
Nonius, nome latinizzato di Pedro Nuñes che lo inventò). La lunghezza
di n intervalli del nonio ricopre n-1 intervalli della scala; quindi se a è la
lunghezza di un intervallino di quest’ ultima, un intervallino del nonio
a. Nella figura 2.1, 10 intervalli del nonio corrispondono
è lungo n−1
n
a 9 intervalli del regolo graduato. L’ indice I corrisponde allo zero
del nonio. Per una posizione qualsiasi, i tratti incisi su NN non sono
allineati con quelli della scala eccettuato uno che vi corrisponde se non
esattamente almeno con buona approssimazione. Nella figura 2.1 il
settimo tratto di NN è allineato con il tratto adiacente inciso sul regolo.
Supponiamo che fra I zero del nonio e tale tratto vi siano k intervallini.
5
2.1. USO DEL NONIO
CAPITOLO 2. MISURE DI LUNGHEZZE
Figura 2.1: Nonio decimale
Scrivendo la lunghezza ka (vedi figura 2.1) in due modi diversi si ha
x+k
n−1
a = ka ,
n
(2.1)
dalla quale si ricava
k
a ,
(2.2)
n
Quindi la lunghezza x è i k -ennesimi di a. Nel caso della figura 2.1, se
7
mm e perciò l’ indice I indica la posizione 26.7 mm.
a= 1mm, è x = 10
Il nonio dei calibri usualmente è diviso in 20 intervalli corrispondentemente a 19 mm della graduazione,quindi consente l’ apprezzamento del
1
mm=0.05mm.
20
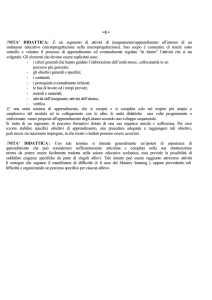
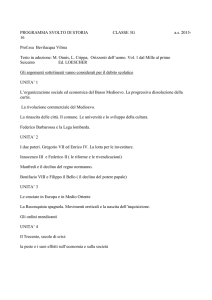
Per maggiori dettagli consultare il libro del [Bussetti 1967] . Riportiamo in Figura 2.2 una fotografia di un calibro di laboratorio.
ELABORAZIONE DATI SU PC.
Per quanto riguarda i dati possiamo adoperare il programma GAUSS,
che, analizzando le varie lunghezze, compie alcune operazioni di statistica, produce una divisione in classi e confronta la distribuzione osservata
con quella Gaussiana.
x=
6
CAPITOLO 2. MISURE DI LUNGHEZZE
2.1. USO DEL NONIO
Figura 2.2: Foto di un calibro di laboratorio
7
2.1. USO DEL NONIO
CAPITOLO 2. MISURE DI LUNGHEZZE
8
Capitolo 3
La molla
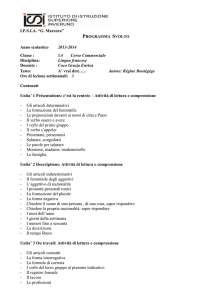
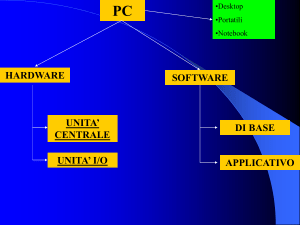
La lunghezza naturale di una molla non sollecitata sia l0 (parte a della
figura 3.1). Appendiamo un peso w che allungherà la molla di una
lunghezza l ( parte b della figura 3.1
A causa dello sforzo dovuto al peso una forza di richiamo viene
originata nella molla che cerca di tornare nella posizione di partenza.
Tramite la legge di Hooke questa forza è proporzionale alla distanza l
( la lunghezza di cui si è allungata la molla):
F = kl ,
(3.1)
. Riportiamo nella
dove k > 0 è la costante della molla espressa in N
m
tabella 3.1 alcuni parametri tipici delle molle presenti in laboratorio.
La forza agente verso il basso è la forza peso della massa attaccata
alla molla. Se la molla è sulla superficie della terra, allora F=mg.
Poichè la molla è in equilibrio la forza diretta verso il basso eguaglia la
Tabella 3.1: Parametri della molla
costante della molla N m−1 Carico max in N lunghezza in cm diametro in cm
3
10
25
32
2
5
5
10
9
15
12
12
35
3
1
1.5
35
CAPITOLO 3. LA MOLLA
Figura 3.1: Schema della molla
forza verso l’ alto :
kl = mg
.
(3.2)
Dalla formula precedente è già possibile dedurre un primo valore di k
k=
mg
l
.
(3.3)
Sia y=0 la posizione di equilibrio della molla con il peso w attaccato ad
essa. Se la molla con questo peso attaccato è allungata di un ulteriore
distanza y le seguenti forze agiranno sulla molla :
• una forza verso l’alto dovuta alla tensione della molla che adesso
è k(l+y)
• una forza diretta verso il basso dovuta al peso w eguale ad mg
L’ equazione del moto diventa:
d2 y
m 2 = mg − k(l + y) = mg − kl − ky .
(3.4)
dt
Grazie alla situazione di equilibrio precedente l’equazione si semplifica
ulteriormente :
d2 y
(3.5)
m 2 = −ky .
dt
10
CAPITOLO 3. LA MOLLA
3.1. MOLLE MULTIPLE
Questa è l’equazione dell’oscillatore la cui soluzione è
y = Acos(ωt + ω1 ) ,
dove ω =
q
k
m
(3.6)
. Il periodo di tale moto oscillatorio vale:
2π
T =
= 2π
ω
r
m
k
.
(3.7)
La relazione che connette la costante k con il periodo T vale
k = 4π 2
m
T2
,
(3.8)
e questa è pure la seconda definizione di k.
Dalle equazioni (3.3) e (3.8) è possibile ricavare il valore della costante g che rappresenta la gravità a Torino quando le masse sono
uguali
l4π 2
(3.9)
g= 2 .
T
L’attrezzatura di laboratorio è riportata nella Figura 3.2.
3.1
Molle multiple
Le molle possono essere in parallelo o in serie.
3.1.1
Molle in parallelo
Ambedue le molle toccano il punto di azione e il livello di compressione
, l , sarà uguale per entrambe. La forza sul blocco Fb sarà
Fb = F1 + F2 = −k1 l − k2 l = −(k1 + k2 )l ,
(3.10)
che significa una costante della molla equivalente ,keq , del tipo
keq = k1 + k2
11
.
(3.11)
3.1. MOLLE MULTIPLE
CAPITOLO 3. LA MOLLA
Figura 3.2: L’esperimento della molla
12
CAPITOLO 3. LA MOLLA
3.1.2
3.1. MOLLE MULTIPLE
Molle in serie
Supponiamo che la posizione di equilibrio sia l2
Fb = −keq l2
.
(3.12)
Per continuare dobbiamo definire il punto di equilibrio fra le due molle
l1
Fb = −k1 l1 + k2 (l2 − l1 ) .
(3.13)
Essendo che all’ equilibrio la forza fra le molle è 0 possiamo risolvere
per l1
k2
l1 =
l2 ,
(3.14)
k1 + k2
e quindi
k1 k2
Fb = −(
)l2 ,
(3.15)
k1 + k2
ovverosia
k1 k2
,
(3.16)
keq =
k1 + k2
che può essere scritta come
1
1
1
=
+
keq
k1 k2
13
.
(3.17)
3.1. MOLLE MULTIPLE
CAPITOLO 3. LA MOLLA
14
Capitolo 4
Pendolo Semplice
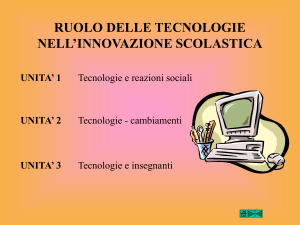
Il pendolo semplice di lunghezza l, con un peso di massa m è visualizzato
nella Figura 4.1 ed è soggetto ad un moto oscillatorio. La forza che
produce il moto è la forza di richiamo gravitazionale che agisce nella
direzione tangente all’ arco del moto e vale m g sin(θ) dove θ è l’angolo
di oscillazione. La seconda legge del moto di Newton dice che
F =m
dv
= −m gsin(θ) ,
dt
(4.1)
e quindi
dv
= −g sin(θ) .
dt
La distanza s che percorre la massa sull’ arco vale
s = lθ ,
(4.2)
(4.3)
e quindi
dθ
dv
d2 θ
v=l
(4.4)
,
=l 2 .
dt
dt
dt
Dalle equazioni precedenti otteniamo la seguente equazione differenziale
del secondo ordine
d2 θ
(4.5)
l 2 + g sin(θ) = 0 .
dt
Questa è un equazione differenziale non lineare che sfruttando lo sviluppo in serie di Taylor
sin(θ) = θ −
15
θ3
+ ...
3!
(4.6)
CAPITOLO 4. PENDOLO SEMPLICE
Figura 4.1: Il pendolo semplice
16
CAPITOLO 4. PENDOLO SEMPLICE
θ3
θ5
d2 θ
+ g ... = 0 .
(4.7)
l 2 +gθ−g
dt
3!
5!
Quindi per angolo piccoli possiamo linearizzare l’equazione precedente
ottenendo
d2 θ
l 2 +gθ = 0 ,
(4.8)
dt
oppure
d2 θ g
+ θ=0 .
(4.9)
dt2
l
Ma questa è l’equazione dell’ oscillatore
d2 θ
+ ω2 θ = 0 ,
2
dt
(4.10)
dove
g
,
l
e quindi il periodo, T0 , delle oscillazioni vale
s
l
T0 = 2π
.
g
ω2 =
(4.11)
(4.12)
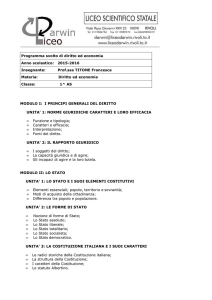
Nel caso in cui θ non sia piccolo la risoluzione non lineare dell’equazione (4.5) richiede gli integrali ellittici. La soluzione non lineare per il
periodo, T, è
9 (sin (1/2 θmax))4
T
2
= 1 + 1/4 (sin (1/2 θmax)) +
T0
64
dove θmax è l’ampiezza iniziale in radianti.
Figura 4.2 riporta la soluzione numerica del rapporto
dell’ ampiezza massima in radianti.
17
,
(4.13)
T
T0
funzione
CAPITOLO 4. PENDOLO SEMPLICE
Figura 4.2: Periodo normalizzato
18
T
T0
Capitolo 5
Velocita limite
Le forze di attrito nei fluidi si dividono come forze proporzionali alla
velocità, regime di Stokes, oppure come forze proporzionali al quadrato
della velocità, regime di Newton.
5.1
Stokes
Le condizioni di partenza considerate da Stokes furono la presenza di
una sfera immersa in un fluido e sottoposta ad una forza di gravità Fg
Fg = m g
,
(5.1)
dove: m è la massa e g l’ accelerazione gravitazionale. La sfera è
tuttavia sottoposta anche all’attrito del fluido viscoso, Fd , che è dato
da:
Fd = −6πηrv ,
(5.2)
dove η è la viscosità, r il raggio della sfera, v la velocità del fluido
rispetto alla sfera, il segno è negativo perchè l’attrito del fluido ha
direzione opposta alla forza di gravità. Infine la sfera è sottoposta
anche all’azione della spinta di Archimede, FA , dato che è immersa in
un fluido:
FA = −ρf gV
(5.3)
dove ρf è la densità del fluido, g l’ accelerazione gravitazionale, V il
volume del corpo immerso ed il segno è negativo perchè la spinta di
Archimede ha direzione opposta alla forza di gravità.
19
5.2. EQN. DIFF. STOKES
CAPITOLO 5. VELOCITA LIMITE
In condizioni di equilibrio l’accelerazione è nulla e quindi:
6πηrv = mg − ρf gV
6πηrv = ρs V g − ρf gV
6πηrv = V g(ρs − ρf ) ,
(5.4)
con ρs densità della sfera e V volume della sfera. Il volume della sfera
V è
4πr3
V =
(5.5)
3
e sostituendo si ha:
4πr3
(ρs − ρf )g
3
2r2
(ρs − ρf )g
3ηv =
3
2r2
v=
(ρs − ρf )g .
9η
6πηrv =
(5.6)
La somma vettoriale (che tiene conto dei versi delle forze) di queste
tre forze è sempre nulla e permette di ottenere la formula della legge
di Stokes, dalla quale si ricava la velocità della sfera in condizioni di
equilibrio raggiunto. La viscosita sarà quindi
2r2
(ρs − ρf )g
η=
9v
oppure
η=
mg
6rπv
,
,
(5.7)
(5.8)
dove m è la massa della sfera.
5.2
Eqn. diff. Stokes
La pallina si trova in un fluido (per es. aria). Essa è soggetta alla
forza peso, alla spinta di Archimede (che pero’ è trascurabile nel caso
in cui la densità del fluido sia molto inferiore a quella della pallina).
Una volta in moto la pallina è sottoposta alla forza di attrito viscoso
proporzionale alla velocità
F v = −γv
20
,
(5.9)
CAPITOLO 5. VELOCITA LIMITE
5.2. EQN. DIFF. STOKES
Se vale la legge di Stokes allora γ = 6ηR, dove R è il raggio della
pallina. Il moto avviene tutto verticalmente e quindi fissando l’ asse y
delle coordinate orientato positivo verso l’ alto avremo, come risultante
delle forze:
X
Fy = −mg + FA − γv ,
(5.10)
dove m = ρs V e V è il volume della pallina, mentre ρs è la densità della
pallina. La forza di Archimede è FA = ρf l V g , dove ρf l è la densità del
fluido. Per la seconda legge della dinamica possiamo scrivere
ma = m
dv
= −mg + FA − γv
dt
,
(5.11)
e dividendo per la massa
FA
γ
dv
= −g +
− v
dt
m
m
,
(5.12)
i due termini costituiti dal campo gravitazionale g e dalla spinta di
Archimede sono due termini costanti e possono essere espressi da un
singolo parametro che possiamo definire campo gravitazionale efficace
ge , che sarà uguale a g nel caso che la spinta di Archimede sia trascurabile, ma che, nel caso la spinta di Archimede sia non trascurabile
mi definirà una costante da moltiplicare per la massa della pallina per
avere il valore della forza costante che agisce su di essa
ge = g −
FA
ρf l
= g(1 −
) .
m
ρs
(5.13)
Da qua si vede per esempio che se ρf l > rhos la forza efficace sarà
diretta verso l’ alto. Inseriamo il tempo caratteristico
4πR3 ρs
2R2 ρs
m
=
=
τ=
γ
3(6πηR)
9η
.
(5.14)
L’ equazione del moto (5.12) si può quindi scrivere come
dv v
+ = −ge
dt τ
.
(5.15)
Questa è un’ equazione differenziale del primo ordine a variabili separabili. Imponendo v(0)=0 otteniamo
t
v(t) = −ge τ (1 − e− τ ) .
21
(5.16)
5.3. ESECUZIONE STOKES
5.3
CAPITOLO 5. VELOCITA LIMITE
Esecuzione Stokes
Elenchiamo la strumentazione disponibile
• Becker graduato
• Liquido di cui si vuole determinare il coefficiente di viscosità
• Bilancia elettronica per la misura del peso del corpo immerso
• Palmer per la misura del diametro del corpo
• Cronometro per la misura del tempo di caduta
• Metro per la misura della distanza percorsa dal corpo
Riportiamo l’esecuzione dell’esperienza. Le misure preliminari da eseguire sono:
• Misurare con la bilancia elettronica il peso medio dei pallini di
piombo (sensibilità della bilancia 0,1g)
• Misurare con il palmer il diametro medio dei pallini e ricavarne il
raggio medio (sensibilità del palmer 0,01mm)
• Misurare i segmenti ∆xi (i=1,2,3) in cui è suddiviso il becker
(sensibilità del metro 0,01 m)
Dobbiamo adesso verificare il moto rettilineo uniforme dei pallini
• Ciascuno sperimentatore misure il tempo ti impiegato dal pallino
a percorrere il segmento ∆xi
• Calcolare il tempo medio impiegato dal corpo a percorrere ciascuno dei tre segmenti e ricavarne la velocità media
• Verificare che entro il margine di errore le tre velocità sono uguali
tra loro
Calcoliamo adesso la velocità limite ed il coefficiente di viscosità:
• Misurare il tempo impiegato dal pallino a percorrere il segmento complessivo di lunghezza ∆x dato dalla somma dei singoli
segmenti ∆xi
22
CAPITOLO 5. VELOCITA LIMITE
5.4. NEWTON
• Calcolare il tempo medio e la velocità media (coincidente con la
velocità limite )
• Determinare il valore del coefficiente di viscosità η con il relativo
errore
5.4
Newton
Una prima forza nel regime di Newton per un oggetto che cade è la
forza di gravità Fg
Fg = m g ,
(5.17)
dove: m è la massa e g l’ accelerazione gravitazionale. La seconda forza
è la resistenza idraulica, Fb , che è data da:
Fb = −bv 2
,
(5.18)
dove b è il coefficiente di resistenza idraulica che vale
1
b = ρCx A ,
2
(5.19)
dove Cx è il coefficiente di resistenza aerodinamica, A è l’area interessata
e ρ è la densità del fluido nel quale avviene la caduta. La seconda legge
del moto di Newton è
m a = Fg + Fb = m g − bv 2
,
(5.20)
ed essendo che alla velocità limite l’accelerazione è zero otteniamo la
velocità terminale
r
2mg
.
(5.21)
v=
ρCx A
Riportiamo nella tabella 5.1 alcuni valori di velocità limite per oggetti
che cadono nell’ aria.
5.5
Eqn. diff. Newton
La seconda legge del moto di Newton vale
m
dv
= Fg + Fb = m g − bv 2
dt
23
,
(5.22)
5.5. EQN. DIFF. NEWTON
CAPITOLO 5. VELOCITA LIMITE
Tabella 5.1: Valori numerici osservati per la velocità limite
Oggetto
massa
area
paracadutista
75 kg
0.7 m2
chicco grandine .48 g .79 cm2
pioggia
0.034 g .13 cm2
velocità
60 m/s
14 m/s
9 m/s
e la soluzione di questa equazione differenziale è
r
r
2mg
g ρCx A
tanh
t
.
v=
ρCx A
2m
q
g ρCx A
Dato che limt→∞ tanh
t =1 otteniamo
2m
v=
24
r
2mg
ρCx A
.
(5.23)
(5.24)
Appendice A
Unità di misura
Nei vari sistemi di unità di misura esistenti la scelta delle unità di
misura è completamente arbitraria, ma deve rispettare certi criteri di
convenienza e di praticità, quale per esempio di adottare unità che non
siano nè troppo grandi nè troppo piccole da imporre poi nei calcoli
l’ uso di troppi prefissi, di multipli o sottomultipli; questo criterio non
è però strettamente applicabile, in quanto molto spesso si deve tener
conto della possibilità di costruire un campione dell’ unità adottata.
Premettiamo alla trattazione dei sistemi di unità di misura una serie di
definizioni.
Un sistema di unità di misura si dice completo quando in esso
è definito un numero di unità di grandezze fondamentali sufficiente a
rappresentare quantitativamente tutti i fenomeni osservabili.
Un sistema di unità di misura si dice assoluto quando le unità in
esso adottate sono invariabili in ogni tempo e luogo e sono definite teoricamente senza alcun riferimento a definizioni sperimentali. Le unità
di un tale sistema vengono dette assolute.
Un sistema di unità di misura si dice coerente quando il prodotto
o il quoziente di più unità di tale sistema forniscono una nuova unità il
cui valore è sempre unitario.
Un sistema di unità di misura si dice decimale quando i multipli ed
i sottomultipli delle sue unità sono scelti secondo le potenze del 10.
Un sistema di unità di misura si dice razionalizzato quando i coefficienti numerici che compaiono nelle leggi vengono scelti in modo che
l’ irrazionale π appaia soltanto in formule relative a configurazioni circolari, sferiche o cilindriche e non in quelle relative a configurazioni piane;
25
A.1. I SISTEMI MKS
APPENDICE A. UNITÀ DI MISURA
Figura A.1: Foto del metro campione nel laboratorio
Figura A.2: La barra di platino-iridio utilizzata come campione del
metro dal 1889 al 1960.
la razionalizzazione si rende in particolar modo necessaria nell’ unità
dell’ elettromagnetismo.
Per maggiori dettagli consultare [Fazio 1995] .
A.1
I sistemi mks
Il sistema mks trae il proprio nome dalle iniziali delle tre unità di
misura delle grandezze meccaniche in esso adottate: il metro (m) per
la lunghezza, il kilogrammo (kg) per la massa e il secondo (s) per gli
intervalli di tempo. Riportiamo in Figura A.1 una fotografia del metro
campione esistente in laboratorio ed in Figura A.2 la barra campione del
metro depositata presso l’Ufficio internazionale dei pesi e delle misure
a Sevres, in Francia.
Il chilogrammo è la massa di un particolare cilindro di altezza e
diametro pari a 0,039 m di una lega di platino-iridio depositato presso
26
APPENDICE A. UNITÀ DI MISURA
A.2. IL SISTEMA CGS
Figura A.3: Foto del kilogrammo campione
l’Ufficio internazionale dei pesi e delle misure a Sevres, in Francia, vedi
Figura A.3.
Tale sistema è ovviamente incompleto, assoluto e razionalizzato.
Dato che esso non poteva descrivere tutte le grandezze, mancando l’
unità di misura di una grandezza fondamentale elettrica o magnetica,
ne sono state fatte successive estensioni introducendo una quarta unità:
a seconda che la quarta grandezza fondamentale fosse la carica elettrica
(unità di misura: coulomb , C), la resistenza elettrica (unità di misura:
ohm , Ω) o intensità di corrente elettrica (unità di misura: Ampere ,
A ) vennero introdotti i tre sistemi mksC, mksΩ ed mksA. In pratica
l’ ultimo, completato con le tre unità di temperatura (kelvin, K ), di
intensità luminosa (candela, cd ) e di quantità di sostanza (mole, mol ),
è quello che va sotto il nome di Sistema Internazionale. Le unità dei tre
sistemi mksC, mksΩ ed mksA sono perfettamente coincidenti in quanto
esse differiscono l’ uno dall’ altro soltanto per la scelta della grandezza
elettrica fondamentale da associare alle tre grandezze meccaniche.
A.2
Il sistema cgs
È un sistema assoluto basato sull’ adozione delle tre grandezze meccaniche fondamentali (lunghezza, massa, intervallo di tempo ), cui sono
associate rispettivamente come unità di misura: il centimetro (cm), il
27
A.2. IL SISTEMA CGS
APPENDICE A. UNITÀ DI MISURA
grammo (g) e il secondo (s), dalle cui iniziali esso trae il nome. Esso fu
proposto su suggerimento di Lord Kelvin dall’ Associazione Britannica
per il Progresso delle Scienze (1873 ) e adottato nel 1881 al I Congrsso Internazionale di Elettricità. Tale sistema è incompleto, in quanto
non comprende grandezze elettriche nè magnetiche ed è perciò adatto
solo per la rappresentazione di fenomeni meccanici. L’ estensione alla
rappresentazione dei fenomeni elettromagnetici è stata fatta con l’ adozione dei sistemi cgses (elettrostatico ) e cgsem (elettromagnetico) ai
quali rimandiamo. L’ unità di velocità è il cm/s; l’ unità di accelerazione, il cm /s2 , detta anche gal (Gal). L’ unità di forza è la dina (simbolo
dyn ), definita come quella forza che, applicata ad un corpo di massa 1
g , gli conferisce un ’ accelerazione di 1 cm /s2 nella stessa direzione di
applicazione della forza; per la seconda legge della dinamica (F = ma
) avremo perciò
1 dyn = 1 g 1cm/s2 .
(A.1)
L’ unità di lavoro è l ’ erg , definito come il lavoro compiuto dalla
forza di 1 dyn per spostare un corpo di 1 cm nella stessa direzione di
applicazione della forza; per la definizione di lavoro sarà perciò
1 erg = 1 dyn 1cm .
(A.2)
L’ erg è anche l’ unità di misura dell ’ energia nel sistema cgs. L’ unità
di misura della potenza è ergs; quella della massa volumica g/cm3 ;
quella della pressione, sarà dyn/cm2 , chiamata anche baria. L’ unità
di quantità di moto , g cm /s; l’ unità di momento meccanico , dyn
cm; l ’ unità di momento della quantità di moto (o momento angolare )
erg s; l’ unità di portata di volume , cm3 /s, mentre quello di portata di
massa è g/s. L’ unità di viscosità dinamica , dalla legge di Newton che
definisce il coefficiente di viscosità η (F =−η A dv/dx), risulta essere
g / (cm s ), chiamata poise (P), mentre l’ unità di viscosità cinematica
ν, definita dalla relazione: ν = η/ρ, con ρ massa volumica del fluido, è
cm2 /s, chiamata stokes (St).
Per quanto riguarda i fenomeni termici, il sistema cgs adotta altre
due unità, il grado Celsius ( 0 C) per la temperatura e la caloria (cal)
per la quantità di calore. La caloria (o piccola caloria è invece definita
come la quantità di calore che si deve fornire alla massa di 1 g di acqua
distillata per portarne la temperatura da 14.5 a 15.5 0 C.
Pertanto nel sistema cgs l’ unità di calore specifico sarà cal/ (g 0 C);
l’ unità di capacità termica , cal / 0 C; l’ unità di calore latente, cal/ g;
28
APPENDICE A. UNITÀ DI MISURA
A.3. NOTA SULLA CALORIA
l’ unità di conduttività termica , dalla legge di Fourier che definisce il
coefficiente di conduttività termica [λ = (δQ)/A(dT /dx)], è cal/(s cm
0
C ).
L’ unità dei vari potenziali termodinamici, che si identificano con
delle energie è l’ erg.
Il sistema cgs utilizza tre unità supplementari comuni ad altri sistemi metrici, che sono:
• il radiante (rad), unità di angolo piano;
• lo steradiante (sr), unità di angolo solido;
• la mole (mol), unità di quantità di sostanza.
Per la loro definizione ufficiale si rimanda il lettore ad uno dei prossimi
paragrafi.
A.3
Nota sulla caloria
In effetti la caloria è oggi un’ unità poco usata, in quanto si tende a
sostituirla con l’ erg o con il joule e ciò in base alla ormai acquisita
nozione che il calore è una forma di energia interna dei corpi e quindi
misurabile in unità di energia. Sono state proposte dal 1934 ad oggi
vari tipi di caloria:
la caloria a 15 0 C, ovvero quella definita nel paragrafo precedente,
tale che:
1 cal15 = (4.1855 ± 0.0005)J ,
(A.3)
adottata nel 1934 dall’ Unione Internazionale di Fisica Pura e Applicata e successivamente anche dal Comitato Internazionale Pesi e Misure
nel 1960; chiamata anche piccola caloria o grammo caloria ;
la caloria termochimica , definita come:
1 caltc = 4.184 J
;
(A.4)
la caloria internazionale , adottata nel 1956 alla 5a Conferenza Internazionale sulle Proprietà dei Vapori e definita come:
1 calIT = 4.1868 J
;
(A.5)
quest’ ultimo valore è quello oggi più comunemente usato, anche se la
direttiva CEE del 27 luglio 1976 ha vietato l’ uso di tutto le calorie a
partire dal 1 gennaio 1978.
29
A.4. IL SISTEMA TECNICO
A.4
APPENDICE A. UNITÀ DI MISURA
Il sistema tecnico
Chiamato anche sistema degli ingegneri o sistema gravitazionale , è
un sistema metrico, non assoluto, non coerente e incompleto che assume come grandezze fondamentali la lunghezza, la forza e gli intervalli
di tempo e adotta come unità di misura rispettivamente il metro, il
kilogrammo-forza (o kilogrammo-peso ) e il secondo.
Il kilogrammo-forza (kgf) è definito come quella forza che, applicata
a un corpo massa 1 Kg, gli imprime un’ accelerazione pari a quella di
gravità campione, fissata in 9.80665 m/s2 .
Sarà, come è facile ricavare:
1 Kgf = 9.80665N
.
(A.6)
In tale sistema di conseguenza, l’ unità di massa è un’ unità derivata;
essa viene indicata con um e vale 9.80665 kg.
L’ unità di lavoro e di energia è il kilogrammetro (kgf m, più
raramente kgm ), definito come 1 Kgf 1 m e pari a 9.80665 J.
L’ unità di potenza è il kgf m/s, del quale è molto usato un multiplo
chiamato cavallo vapore (CV), definito esattamente come 75 kgf m/s
= 735.499 W.
L’ unità di pressione è il Kgf /m2 , corrispondente al millimetro
d’ acqua (mmH2 O).
Pe ricavare i fattori di conversione fra le unità tecniche e le corrispondenti unità degli altri sistemi basta tener presente che 1 Kgf =
9.80665 N, 1 um = 9.80665 kg, che si ricavano entrambe dalla seconda
legge della dinamica, se si ricorda che mentre la forza di 1 N accelera
la massa di 1kg accelerazione di 1m/s2 , la forza di 1 kgf le imprime
invece un’ accelerazione di 1 m/s2 , la forza di 1 kgf le imprime invece
un’ accelerazione di 9.80665 m/s2 .
A.5
Il sistema SI
La XI Conferenza Generale di Pesi e Misure, tenutasi a Parigi dall’ 11
al 20 ottobre 1960, considerata la Risoluzione 6a della X CGPM, con la
quale essa ha adottato le sei unità che devono servire di base per l’ istituzione di un sistema pratico di misura per le relazioni internazionali,
considerata la Risoluzione 3a adottata dal Comitato Internazionale Pesi
e Misure nel 1956, considerate le Raccomandazioni adottate dal CIPM
30
APPENDICE A. UNITÀ DI MISURA
A.5. IL SISTEMA SI
nel 1958, concernenti l’ abbreviazione del nome di questo sistema e i
prefissi per la formazione dei multipli e sottomultipli delle unità.
DECIDE:
1. Il sistema metrico fondato sulle sei unità di misura base di cui
sopra è designato con il nome di Sistema Internazionale di Unità
2. L’ abbreviazione internazionale di detto sistema e SI
Il Sistema Internazionale, adottato con il documento della XI CGPM di cui sopra e completato dalla XIV CGPM (1971), alla XV CGPM
(1975), alla XVI CGPM (1979 ) e alla XVII CGPM (1983) con alcune nuove adozioni e modifiche di precedenti definizioni, è fondato sulla
adozione di sette grandezze fondamentali: le quattro del sistema mksA razionalizzato, o sistema Giorgi, e cioè la lunghezza , la massa, gli
intervalli di tempo, l’ intensità luminosa e la quantità di sostanza.
Le corrispondenti unità di misura vengono cosı̀ definite:
lunghezza: il metro (m) ovvero la distanza percorsa nel vuoto dalla
luce nell’ intervallo di tempo di (1 / 299 792 458 ) s .
massa: il kilogrammo (kg) ovvero la massa del prototipo di platinoiridio, depositato presso il Bureau International des Poids et Mesures, nei sotteranei del padiglione di Breteuil, a Sevres.
tempo: il secondo(s), ovvero la durata di 9 192 631 770 oscillazioni
della radiazione emessa dall’ atomo di Cesio 133 ( 133 Cs) nello stato fondamentale 2S1/2 nella transizione dal livello iperfine
F=4, M=0 al livello iperfine F=3, M=0.
corrente elettrica: l’ Ampere (A), ovvero la corrente elettrica costante
che, fluendo in due conduttori rettilinei, paralleli, indefinitamente
lunghi, di sezione circolare trascurabile, posti a distanza di 1 m
nel vuoto, determina fra essi una forza di 2 10−7 N per metro di
conduttore.
temperatura: il Kelvin (k), ovvero la frazione di 1 /273.16 della temperatura termodinamica del punto triplo dell’ acqua.
intensità luminosa: la candela (cd) è l’ intensità luminosa in una data
direzione di una sorgente che emette una radiazione monocromatica di frequenza 540 ·1012 Hz e la cui intensità energetica in tale
direzione è di (1/683) W/sr.
31
A.6. PREFISSI NEL SI
APPENDICE A. UNITÀ DI MISURA
sostanza: la mole (mol), ovvero la quantità di sostanza di un sistema
che contiene tante unità elementari quanti sono gli atomi in 0.012
Kg di carbonio 12 ( 12 C).
Accanto alle sette unità fondamentali vengono definite nel SI due
unità supplementari, il radiante e lo steradiante:
angolo piano: il radiante (rad), ovvero quell’ angolo piano con il vertice nel centro della circonferenza che sottende un arco di lunghezza
uguale al raggio.
angolo solido: lo steradiante (sr) ovvero quell’ angolo solido con il
vertice nel centro della sfera che sottende una calotta sferica la
cui area è uguale a quella di un quadrato con lati uguali al raggio
della sfera.
A.6
Prefissi nel SI
Questi prefissi (vedi tabella A.1) sono adoperati per indicare multipli o
sottomultipli delle unità di base, eccetto che per le unità di massa che
sono formate applicando il prefisso al simbolo g: esempio Mg e non kkg
e mg e non µkg .Solamente un singolo prefisso è permesso . Usate ns
piuttosto che mµs , pF piuttosto che µµF ,GW piuttosto che kMW .
32
APPENDICE A. UNITÀ DI MISURA
A.6. PREFISSI NEL SI
Tabella A.1: Tabella dei prefissi
f attore pref isso simbolo f attore pref isso simbolo
f attore pref isso simbolo f attore pref isso symbolo
101
deka
da
10−1
deci
d
2
−2
10
hecto
h
10
centi
c
3
−3
10
kilo
k
10
milli
m
6
−6
10
mega
M
10
micro
µ
9
−9
10
giga
G
10
nano
n
12
−12
10
tera
T
10
pico
p
15
−15
10
peta
P
10
f emto
f
18
−18
10
exa
E
10
atto
a
21
−21
10
zetta
Z
10
zepto
z
24
−24
10
yotta
Y
10
yocto
y
33
A.6. PREFISSI NEL SI
APPENDICE A. UNITÀ DI MISURA
34
Appendice B
Dati
B.1
Costanti
Presso l’ I.M.G., alla quota di 239 m sul livello del mare ( a circa 2.5
m sotto il livello stradale ), il valore di g è misurato nel 2006
g = 9.805341970m s−2
(B.1)
Una variazione di un metro, sulla quota verticale, porta ad una variazione di 3 parti sulla settima cifra significativa. Se ci fosse un dislivello
di circa +/- 10 m ( tra IMG e IFG) si potrebbe aver dei dubbi sul 4.
Per maggiori dettagli consultare [?] .
Concludendo forse basta 9.8053.............................
La costante di gravitazione universale vale invece:
G = 6.67428(67) 10−11 m3 kg −1 s−2
(B.2)
le cifre fra parentesi danno l’ incertezza ad una 1-deviazione standard nelle ultime cifre ( ovverosia 0.00067 ) l’ incertezza in parti per
milione è: 128 ppm
Per maggiori dettagli consultare [Cohen 1996] .
La costante di Boltzmann vale
k = 1.38 10−23 joule/ K
(B.3)
k = 1.381 0−14 erg/ 0 C
(B.4)
35
B.2. TABELLE
APPENDICE B. DATI
Tabella B.1: Tabella dei calori specifici
Sostanza
cp [cal/(g 0 C] a 250
Acqua
Alluminio
Benzolo
Rame
Mercurio
P iombo
V etro
Zolf o
N aCl
Glicerina
N eon
Aria
0.998
0.215
0.409
0.0925
0.0033
0.031
0.20
0.178
0.204
0.57
0.246
0.24
Riportiamo la costante dei gas perfetti R:
B.2
R = 8.314 joule/(mole K)
(B.5)
R = 8.314107 erg/(mole K)
(B.6)
R = 0.08206 litri atm/(mole K)
(B.7)
Tabelle
36
APPENDICE B. DATI
B.2. TABELLE
Tabella B.2: Tabella della conduttività termica
Sostanza
K [cal/(cm sec
Argento
Rame
P iombo
Mercurio
Sughero
lana di roccia
acqua
legno di larice
0
C)] a 250
0.98
0.92
0.08
0.02
0.0001
0.0001
410−5
910−4
Tabella B.3: Tabella del modulo di Young
Materiale
dimensioni
Acciaio − AST M − A36
Alluminio
V etro
Calcestruzzo
Legno − douglas
Osso
P olistirene
Densità Modulo di Y oung Limite di rottura
Kg/m3
7860
2710
2190
2320
525
1900
1050
109 N/m2
200
70
65
30
13
9
3
37
106 N/m2
400
110
50
40
50
170
48
B.2. TABELLE
APPENDICE B. DATI
Tabella B.4: Tabella delle Viscosità ;
a
Peso medio (S.A.E. 30)
Sostanza
viscosità (N s/m2 )
Glicerina (20 0 C)
Olio lubrif icante da motorea (0 0 C)
Olio lubrif icante da motorea (20 0 C)
Sangue (37 0 C)
Acqua (20 0 C)
Acqua (90 0 C)
Benzina (20 0 C)
Aria (20 0 C)
CO2 (20 0 C)
1.5
0.11
0.03
4.010−3
1.010−3
0.3210−3
2.910−4
1.810−5
1.510−5
Tabella B.5: Tabella del valori a e b dei gas
Gas
Ar
CO2
He
N2
H2O
O2
SO2
a[litri2 atm/mole2 ] b[litri/mole]
1.345
3.592
0.034
1.390
5.464
1.360
6.714
38
3.2210−2
4.2610−2
2.3710−2
3.9110−2
3.0410−2
3.1810−2
5.6310−2
Appendice C
Matematica
C.1
Derivate
Sotto troverete alcune tabelle di funzioni reali e la loro corrispondente
derivata.
Regole di Base della derivazione
f (x)
f (x) + g(x)
f (x)g(x)
f (x)
, g 6= 0
g(x)
f (g(x))
f −1 (x)
C.1.1
df (x)
= f ′ (x)
dx
f ′ (x) + g ′ (x)
f ′ (x)g(x) + f (x)g ′ (x)
f ′ (x)g(x) − f (x)g ′ (x)
g(x)2
′
f (g(x))g ′(x)
1
f ′ (f −1 (x))
Polinomi e potenze
f (x)
c∈R
xr
√
x
|x|
f ′ (x)
0
rxr−1
1
√
2 x
x
|x|
=
|x|
x
Dominio di applicazione
x∈R
x∈R
x>0
x 6= 0
39
C.1. DERIVATE
C.1.2
APPENDICE C. MATEMATICA
Esponenziali e funzioni logaritmiche
f (x)
exp(x) = ex
ax
ln x
xx
C.1.3
f ′ (x)
exp(x) = ex
ax ln a
1
x
xx (1 + ln x)
Dominio di applicazione
x∈R
x∈R
x>0
x>0
Funzioni trigonometriche
f (x)
sin x
cos x
tan x
f ′ (x)
cos x
− sin x
sec2 x
Dominio di applicazione
x∈R
x∈R
π
x 6= nπ + , n ∈ Z
2
cot x
− csc2 x
x 6= nπ, n ∈ Z
π
sec x
sec x tan x
x 6= nπ + , n ∈ Z
2
csc x
− csc x cot x
x 6= nπ, n ∈ Z
1
√
arcsin x
|x| < 1
1 − x2
1
arccos x − √
|x| < 1
1 − x2
1
arctan x
x∈R
1 + x2
40
APPENDICE C. MATEMATICA
C.1.4
C.1. DERIVATE
Funzioni Iperboliche
f (x)
sinh x
cosh x
tanh x
coth x
sech x
csch x
f ′ (x)
Dominio di Applicazione
cosh x
x∈R
sinh x
x∈R
2
sech x
x∈R
2
− csch x
x 6= 0
− sech x tanh x
x∈R
− csch x coth x
x 6= 0
1
√
arsinh x
x 6= 0
x2 +1
1
√
arcosh x
|x| > 1
x2 −1
1
artanh x
−1 < x < 1
1−x2
1
arcoth x
|x| > 1
1−x2
C.1.5
Altre Funzioni
f (x)
f ′ (x)
Dominio di Applicazione
2
2
√ e−x
Erf x
x∈R
π
1
Li x
x>1
ln x
Si x
sinc x
x∈R
1
gd x
x∈R
cosh x
1
gd−1 x
|x| < π2
cos x
Hn (x) 2nHn−1 (x)
x∈R
41
C.2. INTEGRALI INDEFINITI
C.2
APPENDICE C. MATEMATICA
Integrali indefiniti
Qui‘ sotto troverete alcune funzioni reali ed il loro corrispondente integrale.
C.2.1
Polinomi e potenze
Z
f (x)
n
x for n 6= −1
x−1
|x|n for n 6= −1
|x|−1
C.2.2
f (x) dx
xn+1
+C
n+1
ln |x| + C
x|x|n
+C
n+1
x ln |x|
+C
|x|
Funzioni esponenziali e logaritmiche
Z
f (x)
ex
f (x) dx
ex + C
ekx
kx
e for k 6= 0
+C
kx
a
ax for a > 0
+C
ln a
ln x
x ln x − x + C
2
(ln x)
x[(ln x)2 − 2 ln x + 2] + C
1
Li x + C
ln x
ln(ln x)
x ln ln x − Li x + C
Dove la versione Euleriana del logaritmo integrale (in Latino logarithmus integralis) è definita come
Li x =
Z
0
42
x
dt
ln t
.
APPENDICE C. MATEMATICA
C.2.3
C.2. INTEGRALI INDEFINITI
Funzioni Trigonometriche
f (x)
Z
f (x) dx
cos x
sin x + C
sin x
− cos x + C
cot x
ln | sin x| + C
tan x
− ln | cos x| + C
sec x
ln | sec x + tan x| + C
csc x
− ln | csc x + cot x| + C
1
x ln tan + C
sin x
2
2
sec x
tan x + C
2
csc x
− cot x + C
sec x tan x
sec x + C
csc x cot x
− csc x + C
1
arctan x + C
1 + x2
1
√
arcsin x + C
1 − x2
C.2.4
Funzioni Iperboliche
f (x)
Z
f (x) dx
cosh x
sinh x + C
sinh x
cosh x + C
tanh x
ln(cosh x) + C
coth x
ln | sinh x| + C
2
sech x
tanh x + C
2
csch x
− coth x + C
sech x tanh x − sech x + C
csch x coth x − csch x + C
43
C.2. INTEGRALI INDEFINITI
C.2.5
APPENDICE C. MATEMATICA
Funzioni cicliche
f (x)
arccos x
arcsin x
arccot x
arctan x
arcsec x
C.2.6
Z
f (x) dx
√
x arccos x − √ 1 − x2 + C
x arcsin x + √
1 − x2 + C
x arccot x + ln √1 + x2 + C
x arctan x − ln √
1 + x2 + C
x arcsec x − ln(x + x2 − 1) + C
Radici Quadrate
f (x)
√
x
√
x2 + 1
√
x2 − 1
1
√
x2 + 1
1
√
x2 − 1
Z
f (x) dx
2 √
x x+C
3
√
x 2
1
x + 1 + arsinh x + C
2
2
1
x√ 2
x − 1 − arcosh x + C
2
2
arsinh x + C
arcosh x + C (x > 1)
• La costante C denota una costante arbitraria rappresentata da
un numero reale ; Li è l’ integrale logaritmico.
• Notate che le tavole possono essere usate solo quando ’integrale c̀ontinuo sul dominio di integrazione. Notate ad esempio il
seguente calcolo errato
Z1
−1
1
x
ln
|x|
= 1 ln |1| − −1 ln | − 1| = 0 − 0 = 0
|x|−1 dx =
|x| −1
|1|
| − 1|
Il calcolo è incorretto perchè |x|−1 non è continuo a x = 0.
44
APPENDICE C. MATEMATICA
C.3
C.3. INTEGRALI GENERALIZZATI
Integrali generalizzati
Riportiamo alcuni integrali generalizzati più comuni
Z
Z
∞
∞0
0Z
√
2
π
2
e−x dx
√
π − 1 k2
e 4
2
2
e−x cos kx dx
∞
2
e−x
π a2
e erfc a
dx
2a
2 +x2
a
0
Z ∞
√
R∞
2
2π
2
sin x dx = 0 cos x dx
4
0
Z ∞
sin ax
(sgn a) π2
(a ∈ R)
dx
x
0
2
Z ∞
sin x
π
dx
2
x
Z 0∞
1 − cos kx
πk
dx
2
2
x
0 Z
∞
x−k
π
dx
(0 < k < 1)
sin πk
x+1
Z 0∞ kx
e
π
(0 < k < 1)
dx
sin πk
x
1+e
−∞
Z ∞
cos kx
π
dx
2ek
2
x +1
0
Z ∞
R ∞ x sin x
a cos x
π
dx
=
dx
(a > 0)
2ea
0 x2+a2
2
2
x +a
0
45
C.3. INTEGRALI GENERALIZZATI
Z
Z
∞
Z0
APPENDICE C. MATEMATICA
sin ax
dx
x(x2 +1)
∞
π
(1
2
− e−a )
√
π
3
e−x x− 2 dx
0
∞
e−x x3 sin x dx
Z ∞0
1
1
− x dx
x −1
e
xe
0
Z ∞
2
cos ax − cos ax
dx
x
0Z
∞ −ax
e −e−bx
dx
x
0
Z ∞
1 1
dx
arcsin −
x x
1 Z
1
arctan x
√
dx
2
x
1−x
0
Z 1
ln(1+x)
dx
x
0
Z 1
ln(1−x)
dx
2
1
x
2
46
(a > 0)
0
γ
γ+ln a
2
ln ab
(a > 0)
(a > 0, b > 0)
1 + ln 2 −
π
2
π
2
√
ln(1+ 2)
π2
12
−2 ln 2
APPENDICE C. MATEMATICA
C.4
C.4. TAYLOR
Taylor
Riportiamo lo sviluppo in serie di Taylor intorno allo 0 di alcune funzioni importanti
x2 x3
x
+
+ ···
e =1+ +
1! 2!
3!
x
x3 x5 x7
sin x = −
+
−
+ ···
1!
3!
5!
7!
x2 x4 x6
+
−
+ ···
cos x = 1 −
2!
4!
6!
x
C.5
C.5.1
Trigometria
Triangolo retto -Definizioni
Considerate il triangolo retto ABC, dove C è l’angolo retto. Quindi :
BC
opposto
sin A =
= ipotenusa
AB
AC
adiacente
= ipotenusa
cos A =
AB
BC
opposto
= adiacente
tan(A) =
AC
1
AB
csc A =
=
= ipotenusa
opposto
sin A
BC
AB
1
=
= ipotenusa
sec A =
adiacente
cos A
AC
1
AC
cot A =
=
= adiacente
opposto
tan A
BC
C.5.2
Formule ridotte
1. sin(−x) = − sin x
2. cos(−x) = cos x
3. sin( π2 − x) = cos x
4. cos( π2 − x) = sin x
5. sin( π2 + x) = cos x
6. cos( π2 + x) = − sin x
47
C.5. TRIGOMETRIA
APPENDICE C. MATEMATICA
7. sin(π − x) = sin x
8. cos(π − x) = − cos x
9. sin(π + x) = − sin x
10. cos(π − x) = − cos x
C.5.3
Identità
1. sin2 x + cos2 x = 1
2. tan2 x + 1 = sec2 x
3. cot2 x + 1 = csc2 x
C.5.4
Somme e Differenze
1. sin(α + β) = sin α cos β + sin β cos α
2. sin(α − β) = sin α cos β − sin β cos α
3. cos(α + β) = cos α cos β − sin α sin β
4. cos(α − β) = cos α cos β + sin α sin β
5. tan(α + β) =
tan α + tan β
1 − tan α tan β
6. tan(α − β) =
tan α − tan β
1 + tan α tan β
C.5.5
Angolo doppio e metà
1. sin 2α = 2 sin α cos α
2. cos 2α = cos2 x − sin2 x = 2 cos2 x − 1 = 1 − 2 sin2 x
2 tan α
1 − tan2 α
r
α
1 − cos α
(determinare se è + o - trovando il qua4. sin = ±
2
2
α
drante in cui giace)
2
3. tan 2α =
48
APPENDICE C. MATEMATICA
C.5. TRIGOMETRIA
r
1 + cos α
α
5. cos = ±
(come sopra)
2
2
6. tan
C.5.6
α
1 − cos α
sin α
=
=
2
sin α
1 + cos α
Altre formule
Considerate un triangolo con lati di lunghezza a, b, e c, ed angoli opposti
A, B, e C, rispettivamente.
1. sin2 α =
1 − 2 cos(2α)
2
2. cos2 α =
1 + 2 cos(2α)
2
3.
sin A
sin B
sin C
=
=
(Law of Sines)
a
b
c
4. c2 = a2 + b2 − 2ab cos C (Legge dei coseni)
5. Area del triangolo = 21 ab sin C
6. Area del triangolo =
( Formula di Heron)
C.5.7
p
s(s − a)(s − b)(s − c), dove s =
a+b+c
2
Cambiamenti
Definizione 1 (Periodicità). Una funzione f è periodica , se per qualche numero p, f (x + p) = f (x) per tutti gli x nel dominio di f .
⊲ Le funzioni trigonometriche sono tutte periodiche.
• sin x, cos x, csc x, e sec x hanno tutte un periodo di 2π.
• tan x and cot x hanno periodi di π.
⊲ Se x in sin x, cos x, etc., è moltiplicato per una costante b , il
periodo è diviso da quella costante:
• sin bx, cos bx, csc bx, e sec bx (b costante) hanno un periodo di
• tan bx e cot bx hanno per πb .
49
2π
b
C.5. TRIGOMETRIA
APPENDICE C. MATEMATICA
Definizione 2 (Ampiezza ). La magnitudine di una oscillazione (solamente per funzioni che oscillano come seno e coseno) è metà della
distanza fra valore massimo e minimo.
⊲ A sin x e A cos x hanno ognuno ampiezza A.
C.5.8
Funzioni trigometriche inverse
Se f (x) = sin x, allora
f −1 (x) = sin−1 x = arcsin x, con −1 ≤ x ≤ 1
Se f (x) = cos x, allora
−1
f (x) = cos−1 x = arccos x, con −1 ≤ x ≤ 1
Se f (x) = tan x, allora
−1
f (x) = tan−1 x = arctan x, con − π2 ≤ x ≤ π2
50
APPENDICE C. MATEMATICA
C.6
C.6. ALFABETO GRECO
Alfabeto greco
minuscolo
α
β
γ
δ
ǫ oppure ε
ζ
η
θ oppure ϑ
ι
κ
λ
µ
ν
ξ
o
π oppure ̟
ρ oppure ̺
σ oppure ς
τ
υ
φ oppure ϕ
χ
ψ
ω
maiuscolo
nome
commenti
A
alpha
B
beta
bita nel Greco moderno
Γ
gamma
∆
delta
E
epsilon
Z
zeta
zita nel Greco moderno
H
eta
ita nel Greco moderno
Θ
theta
thita nel Greco moderno
I
iota
K
kappa
Λ
lambda
M
mu
mi nel Greco moderno
N
nu
ni nel Greco moderno
Ξ
xi
O
omicron significa o-minuscolo nel Greco moderno
Π
pi
P
rho
Σ
sigma
ς è adoperato solo alla fine delle parole
T
tau
Υ
upsilon
ipsilon nel Greco moderno
Φ
phi
X
chi
Ψ
psi
Ω
omega significa o-maiuscolo nel Greco moderno
51
C.6. ALFABETO GRECO
APPENDICE C. MATEMATICA
52
Bibliografia
[Bussetti 1967] G.Bussetti,“Esercitazioni pratiche di Fisica, quarta edizione,
Levrotto & Bella , Torino (1967).
[Cohen 1996] E.R. Cohen , “The Physics Quick Reference Guide ,
AIP Press, Woodbury (NY) (1996)
[Fazio 1995] M.Fazio ,“Dizionario e manuale delle unità di misura, terza edizione,
Zanichelli , Bologna (1995)
[Pescetti 1975] D. Pescetti,“Termodinamica,
Piccin Editore,Padova (1975)
53
Indice analitico
C
R
caloria
a 15 gradi, 29
internazionale , 29
termochimica , 29
cgs, 27
R-gas, 36
E
Esperienza
misura di lunghezze, 5
molla, 9
pendolo, 15
velocitaà limite, 19
G
g-accurato, 35
G-grande-accurato, 35
S
sistema-internazionale, 30
sistema-tecnico, 30
sistemi-misura, 25
T
Tabella
a-b, 36
costante-molla, 9
cp specifici, 36
K, 36
modulo, 36
viscosità, 36
M
mks, 26
momenti, 1
asimmetria, 2
curtosi, 2
dev.-stand.-empirica, 1
deviazione-assoluta, 1
valor-medio, 1
varianza-empirica, 1
N
nonio, 5
54