Segnale
Elettronica = Elaborazione e trasmissione di
Potenza
Grandezza Fisiche
Trasduttori
Segnali Elettrici (V,I)
Informazione contenuta nella variazione rispetto ad un livello di
riferimento
Analogici
Segnali
Digitali
1
Elettronica per il controllo della potenza
Si tratta di controllare forti correnti e/o forti tensioni
E’ richiesto, in genere, elevato rendimento η:
Infatti la potenza assorbita dall’alimentazione e non fornita al carico
si tramuta tutta in calore da smaltire da parte dell’elemento attivo.
Val
Ie
Ve
Ial
Controllo
potenza sul
carico
η=
Iu
PL
Pal + Pe
Vu
Si tratta di regolare la potenza che viene fornita ad un utilizzatore (carico)
in funzione di un segnale d’ingresso Ve, prelevando la potenza fornita al
carico da una fonte primaria esterna
- Pal e’ la potenza assorbita dall’alimentazione
- Pe è la potenza che entra nell’ingresso per il controllo
- PL e’ la potenza fornita al carico,
Infatti la potenza assorbita dall’alimentazione e non fornita al carico si tramuta
tutta in calore da smaltire da parte dell’elemento attivo.
Il dispositivo che compie l’operazione di regolare la potenza fornita, purtroppo,
per funzionare deve dissipare esso stesso della potenza, che oltre ad essere
sprecata viene tramutata in calore e crea problemi di smaltimento.
Pertanto per fornire al carico una potenza PL, occorre prelevare dalla fonte di
energia una potenza Pal maggiore, e tutta la differenza PD= Pal+Pe - PL viene
trasformata in calore da dissipare.
Il rendimento sopra definito quanto più è prossimo all’unità tanto più sta ad
indicare che il sistema è in grado di controllare potenza senza sprecarne
(risparmio energetico) e minimizzando i problemi di dissipazione del calore.
prodotto.
2
Safe Operating Area
•
Potenza dissipata Pd da un dispositivo attivo (transistore)
I
Ie
V
Pd= VI +VeIe ≅ VI
Ve
•
•
•
La potenza dissipata si trasforma in calore, che eleva la temperatura del
transistore al di sopra di quella dell’ambiente.
Al di sopra di una temperatura massima il transistore si distrugge
Esiste quindi, per ogni data temperatura ambiente, una massima potenza
dissipabile Pmax, oltre la quale il trasistore (o il circuito integrato) puo’ essere
danneggiato.
Si prende ora in esame un semplice dispositivo di controllo a tre terminali, quale
un transistore.
Il dispositivo ha due porte: una d’ingresso da cui entra una potenza VeIe e una di
uscita che riceve una potenza VI, per cui la potenza che entra in totale, e che
viene trasformata in calore, è la somma delle due. In genere la potenza VeIe,
associata al segnale di controllo d’ingresso, è trascurabile rispetto a quella
dissipata sull’uscita.
3
Safe Operating Area (SOA)
I
VI = Pdmax
Imax
Ve
V
Zona
proibita
Vmax
Ogni dispositivo attivo, adatto a controllare potenza, sul piano I(V) delle sue
caratteristiche presenta una massima corrente che puo’ sopportare (Imax ), una
massima tensione ai suoi capi oltre la quale puo’ danneggiarsi (Vmax) e una
massima potenza dissipabile VI = Pdmax, che e’ rappresentata da un’iperbole
(XY=cost).La zona in cui il dispositivo puo’ funzionare senza problemi e’quella
al di sotto di tali limiti, ed e’detta S.O.A. (Safe Operating Area), mentre se il
dispositivo va a funzionare nella zona esterna, tratteggiata in figura, rischia di
danneggiarsi.
4
Modello termico semplificato
(linearizzato)
•
Il modello termico adottabile per calcolare l’incremento di temperatura
del Si (dove si dissipa la potenza Pd) prevede che l’incremento della
temperatura Tj del Si rispetto a quella Ta dell’ambiente sia
proporzionale alla potenza dissipata.
T j − Ta = K ja Pd
•
Il fattore di proporzinalita’ Kja e’ detto “resistenza termica tra la
giunzione e l’ambiente” e dipende dal tipo di contenitore dell’elemento
attivo e dalla presenza eventuale di dissipatori termici.
Per ogni applicazione di potenza occorre controllare che il dispositivo utilizzato,
a causa della potenza dissipata, non rischi di danneggiarsi, cosa che succederebbe
se la sua Tj dovesse superare il valore massimo consentito Tjmax.
Poiche’ quindi Pdmax = (Tjmax -Ta)/Kja, la massima potenza dissipabile dipende
dalla temperatura ambiente nonche’ dalla resistenza termica tra il Silicio e
l’ambiente, cioe’ anche dalla presenza di dissipatori.
5
Controllo analogico della potenza
V
la potenza nel carico e’ pari a RLI2
Ve
I
V = Val - RLI
Val
VL=RLI
Sul transistore:
RL
Pd = VI = ValI – RLI2
La potenza dissipata dal transistore varia
al variare di I secondo una parabola, ed
ha un max per I = Val / 2RL, che vale
Pmax= Val2/4RL
Vantaggi:
Controllo molto preciso e veloce, effettuabile sino a frequenze molto alte
Difetti:
Rendimento scarso, e per questo difficilmente realizzabile per potenze
elevate
La tensione sul carico e’ sempre inferiore alla tensione di alimentazione
6
Controllo a commutazione (switching)
(esempio)
Q1
L
A
I
Val
Q2
VA
C
Q1 e Q2 sono comandati periodicamente
e in controfase tra loro, con periodo T e
Duty Cycle Ton1/T= δ
RL
VL
L e C costituiscono un
filtro passabasso che
lascia passare solo il
valor medio
Si vuole qui schematizzare un possibile circuito che, a partire da una tensione
permetta di
ricavare una diversa tensione d’uscita VL, con
elevato rendimento ed indipendentemente dalla
corrente I assorbita dal carico. Cerchiamo quindi
un circuito che si comporti come un
trasformatore di tensione in continua.
d’ingresso fornita da una fonte di alimentazione Val,
I due interruttori schematizzati nel circuito in
realtà saranno realizzati da un transistore e un
diodo, ma per comprendere il funzionamento del
sistema possiamo pensarli due interruttori ideali.
7
Forme d’onda
Q1
Q1 A
on
Val
off
Q2
VA
VL
t
on
t
off
T1
VA
Val
Q2
T2
T1
T = T1+T2
δ = T1/T
VL
VL = Val x δ
t
Durante il tempo T1 Q1 e’ on e Q2 e’ off, per cui la tensione nel punto A e’ pari
alla Val, come mostrato nella figura.
Durante T2, essendo Q1 off e Q2 on, la tensione in A e’ zero.
Nella figura si evidenzia con linea tratteggiata il valor medio della tensione in A,
che e’ quello che e’ presente sul carico a valle del filtro passabasso che lascia
passare solo la componente continua.
Il valor medio della tensione in A e’dato da VL = Val T1/T, e quindi dipende da
δ=T1/T, che si definisce “Duty Cycle” dell’onda quadre di comando.
E’quindi possibile regolare la tensione in uscita, e quindi la potenza fornita ad un
carico, semplicemente regolando il duty cycle.
Questo tipo di regolazione e’ a rendimento molto alto, in quanto gli interruttori
idealmente non dissipano energia, cosi’ come gli elementi reattivi costituiti dal
condensatore e dall’induttore. In realta’ nessun elemento e’ del tutto ideale, ma
comunque il rendimento puo’ essere notevolmente elevato (80-90%).
Con configurazioni diverse, ma basate sullo stesso principio, si puo’ anche
ottenere una tensione di uscita superiore a quella d’ingresso.
Le frequenze di Switching variano da decine di KHz a qualche MHz: al crescere
della frequenza aumentano le perdite ma si riducono le dimensioni dei
componenti
Questo tipo di regolatore e’ meno preciso del controllo analogico, e meno pronto
alla risposta. Crea notevoli disturbi (problemi di compatibilita’ elettromagnetica)
8
Controllo a commutazione della potenza
(switching)
•
Frequenze di switching:
– da decine di KHz a qualche MHz: al crescere della frequenza
aumentano le perdite ma si riducono le dimensioni dei componenti
•
Pregi:
– Elevato rendimento e quindi risparmio energetico e ridotto calore
da smaltire
– Con diverse configurazioni circuitali la tensione d’uscita puo’
essere maggiore o minore della tensione di alimentazione.
•
Difetti:
– Meno preciso del controllo analogico, e meno pronto alla risposta
– Crea notevoli disturbi (problemi di compatibilita’
elettromagnetica)
9
Alimentatore stabilizzato
1
2
3
4
5
1. Filtro antidisturbi all’ingresso
2. Trasformatore (eventualmente con piu’ secondari) per riportare la tensione, a
partire da quella della rete, ai valori desiderati
3. Raddrizzatore per ottenere una forma d’onda a valor medio non nullo
4. Filtro per eliminare le componenti alternate e ottenere la sola continua
5. Regolatore di tensione, per ottenere all’uscita una tensione precisa,
indipendente dal valore di quella di ingresso, dalla corrente assorbita dal
carico, e dalla temperatura.
Qualunque apparato elettronico, per funzionare, necessita di alimentazione, cioe’
di ricevere la potenza necessaria da generatori di tensione continua di valore
preciso e costante, in grado di fornire tutta la corrente richiesta dalle esigenze di
funzionamento.
Qualunque apparato dispone pertanto di un alimentatore, che, a partire da una
fonte primaria di energia, fornisce tutte le tensioni necessarie per il suo
funzionamento, e assicura la disponibilita’ di potenza che puo’ essere richiesta
anche nelle situazioni di funzionamento piu’ gravose.
La potenza per l’alimentazione puo’ essere prelevata o dalla rete di distribuzione
dell’energia elettrica (230V, 50Hz) oppure direttamente da una fonte continua
(batteria) come accade ad esempio per gli apparati portatili
Parametri fondamentali dell’alimentatore sono pertanto:
•Fonte primaria d’ingresso (alternata o continua, valore di tensione e sue
tolleranze)
•Potenza totale max da fornire al carico
•Valori delle tensioni di uscita e delle correnti da fornire al carico e loro
tolleranze
•Rendimento in potenza
10
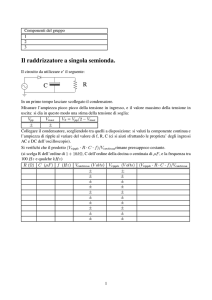
Raddrizzatore a semplice semionda
Durante la semionda positiva il diodo conduce e la tensione sul carico è uguale a
quella d’ingresso meno la piccola caduta sul diodo. Durante la semionda negativa
il diodo si interdice e l’uscita è a tensione 0.
Il raddrizzatore a semplice semionda è usato solo per potenze di piccola entità:
infatti esso sfrutta solo una semionda e quindi richiede un filtraggio passabasso
pesante per poter ricavare, dalla forma d’onda d’uscita, un valore continuo.
Inoltre nel secondario del trasformatore circola una corrente a valor medio non
nullo, cosa che fa sì che il nucleo del trasformatore lavori male e debba essere
surdimensionato.
11
Raddrizzatori a doppia semionda
Vu
Ponte di Graetz
Nel primo circuito viene utilizzato un trasformatore con secondario con presa
centrale. Si può notare come, essendo uguale e di egual verso la tensione sui due
mezzi secondari, quando Vu è positivo conduce il diodo D1 e si ha Vu’ circa
uguale a Vu; quando invece la tensione Vu è negativa conduce D2, e la corrente
che circola in RL, percorrendola nello stesso verso che nella semionda positiva,
provoca una Vu’ circa uguale a Vu’ con lo stesso segno di prima.
Questa volta si sfruttano entrambi le semionde, il filtro passabasso che seguirà
avrà compito facilitato nel costruire una continua e la corrente che circola nel
secondario del trasformatore ha valor medio nullo.
Nel secondo circuito, detto ponte di Graez, quando la tensione Vu all’ingresso del
ponte è positiva conducono D4 e D2, quando la tensione è negativa conducono
D3 e D1, ma la resistenza che simula il carico è sempre percorsa nello stesso
verso e quindi la tensione ai suoi capi ha lo stesso segno in entrambi le semionde.
12
Regolatori di tensione
•
•
A controllo analogico (dissipativi)
– Molto precisi
– Basso rendimento
A commutazione (Switching)
– Elevato rendimento
– Poco precisi
13