L’EQUILIBRIO
1. Vettori
1.1. Introduzione al calcolo vettoriale. Supponiamo di essere al
centro di una stanza e di volerci spostare in linea retta di 1 m. Possiamo sapere qual è il punto finale che raggiungeremo? La risposta è
negativa dal momento che non sappiamo in che direzione e in che verso
dobbiamo spostarci: infatti potremmo trovarci in uno qualunque dei
punti di una circonferenza di raggio pari a 1 m. È importante dare,
oltre all’intensità dello spostamento, anche la sua direzione (la retta lungo la quale ci si sposta, esempio: orizzontale, verticale) e il suo
verso (ad esempio: da destra a sinistra o viceversa).
Le grandezze fisiche caratterizzate da un’intensità, da una direzione
e da un verso prendono il nome di grandezze vettoriali o vettori.
I vettori si indicano con una freccia sopra la lettera che rappresenta la
grandezza fisica associata a quel vettore. Ad esempio il vettore sposta→
mento si indicherà con −
s . L’intensità del vettore spostamento invece
verrà indicata con la lettera, priva della freccia, ossia con s. Nel nostro caso l’intensità del vettore spostamento è di un metro e possiamo
pertanto scrivere s = 1 m. Come vedremo, in molte applicazioni è
importante chiarire il punto d’applicazione del vettore, ossia il punto
in cui è disegnata la coda del vettore.
Andiamo ora a introdurre le regole con cui si possono sommare
due vettori. Partendo sempre dal nostro esempio degli spostamenti,
prendiamo due spostamenti consecutivi e costruiamone graficamente
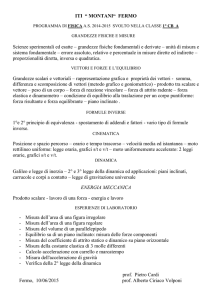
la somma. Come emerge dal disegno riportato in figura 1 il vettore
somma è un vettore che ha per punto iniziale il punto iniziale del primo vettore e per punto finale il punto finale del secondo vettore. È
importante sottolineare come il vettore somma abbia in generale una
intensità minore rispetto alla somma delle intensità dei singoli vettori.
In un triangolo infatti la lunghezza di un lato è sempre minore della
somma degli altri due.
C’è però il caso particolare in cui le direzioni dei due vettori sono
coincidenti, ossia i due vettori giacciono sulla stessa retta. In questo
caso, se i versi dei due vettori sono concordi, il vettore somma ha per
1
2
L’EQUILIBRIO
−
→
s2
−
→
s1
−
→
→
s1+−
s2
Figura 1. Somma tra due vettori.
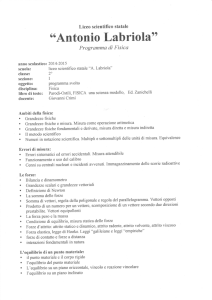
intensità la somma delle intensità, se invece i versi sono discordi allora
il vettore somma ha per intensità la differenza delle intensità, come
emerge dalla figura 2:
−
→
s1
−
→
s2
−
→
→
s1+−
s2
−
→
s1
−
→
→
s1+−
s2
−
→
s2
Figura 2. Somma e differenza tra due vettori che
giacciono sulla stessa retta.
Notiamo come nei casi che abbiamo visto in questa sezione la coda del secondo vettore coincide con la punta del primo vettore. In
questi casi si parla di metodo punta-coda per sommare due vettori. Nella prossima sezione vedremo che esiste anche un’altra regola di
fondamentale importanza per sommare due vettori.
1.2. Regola del parallelogramma. Un’altra regola con cui si sommano i vettori in fisica quando hanno lo stesso punto di applicazione
(ossia la stessa coda) è la cosiddetta regola del parallelogramma.
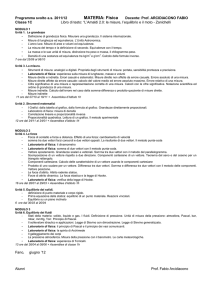
Supponiamo che un uomo si sposti in maniera obliqua su una barca,
che a sua volta si sposta orizzontalmente rispetto alla riva di un fiume.
Qual è lo spostamento totale dell’uomo rispetto alla riva? È chiaro
che entrambi i vettori spostamento vanno applicati allo stesso punto
(l’uomo che si sta muovendo), come mostrato in figura 3.
Lo spostamento totale dell’uomo rispetto alla riva è dato dalla diagonale del parallelogramma che ha per lati lo spostamento dell’uomo
→
−
→
s u rispetto alla barca e lo spostamento della barca −
s b rispetto alla
riva. Per la particolare costruzione geometrica adottata questa regola
L’EQUILIBRIO
3
−
→
st
−
→
su
−
→
sb
Figura 3. Somma di due vettori con il metodo del
parallelogramma.
per sommare due vettori va anche sotto il nome di regola del parallelogramma.
Prima di procedere, notiamo come l’uomo sia stato modellizzato con
un punto materiale. Questa è una idealizzazione che useremo spesso:
un corpo esteso dotato di massa verrà visto come un punto materiale
nel quale possiamo pensare concentrata tutta la massa del corpo. Questo punto prende anche il nome di baricentro del corpo. Se il corpo
ha forma regolare il baricentro coincide con il suo centro di simmetria:
ad esempio, il baricentro di una sfera omogenea coincide con il centro
della sfera.
Perché, quando camminiamo sotto la pioggia, dobbiamo tenere l’ombrello inclinato in avanti per non bagnarci? La risposta sta proprio nel
modo in cui si sommano i vettori. Infatti, le gocce di pioggia si spostano verticalmente rispetto al suolo a causa della loro forza-peso. Se
l’uomo si sposta rispetto al suolo orizzontalmente da destra a sinistra, è
come se il suolo si muovesse rispetto all’uomo orizzontalmente da sinistra a destra. Sommando i due vettori abbiamo che la pioggia rispetto
al viandante cade in maniera obliqua e l’ombrello va inclinato in avanti.
Per concludere questa sezione ricordiamo qual è la regola per moltiplicare un numero per un vettore. Supponiamo di moltiplicare un
vettore di intensità s per un numero k positivo. Otterremo un vettore
che ha stessa direzione e stesso verso e per intensità k · s. Se invece
4
L’EQUILIBRIO
moltiplichiamo il vettore per un numero k negativo avremo un vettore
con la stessa direzione, intensità k · s e verso opposto. In particolare
due vettori si dicono opposti quando hanno stessa direzione, stessa
intensità ma verso opposto. I vettori opposti sono importanti per il
calcolo della differenza di due vettori: infatti la differenza di due vettori si definisce come la somma del primo vettore e dell’opposto del
secondo vettore.
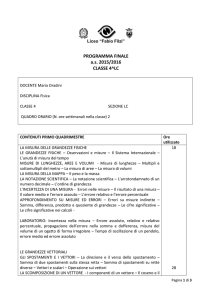
1.3. Scomposizione di vettori. Un’altra operazione importante per
quelle che sono le applicazioni alla fisica è la scomposizione di vettori rispetto a due assi. Noi ci limiteremo in questa sezione alla scomposizione di un vettore rispetto a due assi perpendicolari tra loro, ad
esempio i due assi cartesiani x e y. La scomposizione di un vettore è
un po’ l’operazione inversa rispetto alla somma: assegnato un vettore,
si tratta di trovare due vettori, uno di direzione orizzontale e l’altro
verticale, la cui somma riproduca il vettore di partenza. La procedura
che dobbiamo seguire è quella della proiezione geometrica del vettore lungo gli assi: partendo dalla punta del vettore dobbiamo tracciare
una linea orizzontale e una linea verticale come nella figura sottostante. Queste due linee intersecano gli assi cartesiani in due punti, che
diventano le punte dei due vettori richiesti: vedi figura 4.
y
−
→
v
−
→
vy
α
x
−
→
vx
Figura 4. Scomposizione di vettori in componenti.
Applicando il teorema di Pitagora abbiamo che le intensità dei tre
vettori v, vx e vy sono legate tra loro dalla relazione v 2 = vx2 + vy2 .
L’EQUILIBRIO
5
Prima di passare agli esercizi, vogliamo ricordare come moltissime
grandezze fisiche in natura sono grandezze vettoriali: oltre allo spostamento, sono dei vettori la velocità e l’accelerazione che incontreremo
a più riprese durante queste lezioni. Le forze sono caratterizzate da una
direzione (la retta d’azione della forza), da un verso, da un punto d’applicazione e dall’intensità misurata dal dinamometro. Pertanto anche
le forze sono dei vettori. Esistono tuttavia anche delle grandezze fisiche caratterizzate solamente da un’intensità: tali grandezze sono dette
grandezze scalari. Tipici esempi sono la massa di un corpo o la sua
temperatura.
2. Equilibrio per traslazioni
2.1. Condizione di equilibrio. In questa sezione vogliamo cominciare a studiare la statica, ossia quella parte della meccanica che si
occupa dell’equilibrio dei corpi. Partiremo con lo studio dell’equilibrio
dei corpi per traslazioni. Un corpo subisce una traslazione quando ogni
suo punto si sposta della stessa quantità nella stessa direzione e nello
stesso verso, in altre parole quando ogni suo punto è sottoposto allo
stesso vettore spostamento.
In fisica giocano un ruolo importante i cosiddetti corpi rigidi. Un
corpo rigido è un corpo che non si può deformare, ossia un corpo in cui
ogni punto mantiene nel tempo la stessa distanza da ogni altro punto
del corpo. In generale studiare il moto o l’equilibrio di un corpo rigido
può non essere banale se il corpo rigido non ha forma regolare. Se però
il corpo rigido ha forma regolare (ad esempio sferica) si può immaginare tutta la massa del corpo concentrata in un punto che è il centro
di simmetria del corpo (nell’esempio della sfera, il suo centro). Questo
centro di simmetria va anche sotto il nome di baricentro.
Lo studio del moto oppure dell’equilibrio del corpo rigido viene in
questo modo ridotto allo studio del moto oppure dell’equilibrio di un
particolare punto dotato di massa, ossia di un particolare punto materiale. In queste pagine useremo sempre per semplicità questo modello
del punto materiale, ossia immagineremo tutta la massa M del corpo
rigido concentrata nel baricentro che pertanto risulterà sottoposto a
una forza peso totale pari a M · g, dove g = 9.81 N/kg. Più in generale, si può utilizzare il modello del punto materiale quando il corpo è
molto più piccolo delle dimensioni fisiche che caratterizzano il problema e quando le direzioni di tutte le forze agenti sul corpo si incontrano
6
L’EQUILIBRIO
in un unico punto.
Anche nel linguaggio di tutti i giorni diciamo che un corpo è in
equilibrio quando non si muove. Cerchiamo ora di tradurre questa
definizione a parole di equilibrio in formule matematiche, limitandoci
per il momento alle traslazioni. Abbiamo visto che le forze hanno effetti
dinamici, ossia sono in grado di mettere in movimento i corpi ai quali
sono applicate. Per avere equilibrio per traslazioni è perciò necessario
che la somma vettoriale di tutte le forze applicate al corpo in esame sia
→
−
uguale a 0 :
−
→
→
−
→
−
→
−
F 1 + F 2 + F 3 +··· = 0 .
Ad esempio consideriamo due squadre che giocano a tiro alla fune:
se una squadra applica una forza diretta orizzontalmente da destra a
sinistra di intensità F e la squadra avversaria applica una forza di ugual
intensità F, ma diretta orizzontalmente da sinistra a destra, avremo che
la somma dei due vettori forza, uguali ed opposti, è uguale a zero e la
fune risulta perciò in equilibrio.
Se ragioniamo in termini di componenti dei vettori avremo che, per
avere equilibrio, la somma di tutte le componenti orizzontali dei vettori
forza deve essere uguale a zero, cosı̀ come deve essere uguale a zero la
somma di tutte le componenti verticali dei vettori forza. Vedremo nelle
prossime sezioni varie applicazioni di questo concetto.
2.2. Forza equilibrante, reazione vincolare. Abbiamo visto nella sezione precedente che la condizione di equilibrio per traslazioni è
l’annullamento della forza totale (detta anche risultante) applicata al
corpo. Vediamo quali conseguenze ha questa condizione di equilibrio.
Supponiamo che ci sia una forza che agisce su un corpo. Evidentemente
il corpo non è in equilibrio. Come facciamo a ripristinare la condizione
di equilibrio? Possiamo aggiungere una seconda forza uguale ed opposta alla prima, ossia una forza con ugual direzione, uguale intensità
ma verso opposto. Una forza con queste caratteristiche è detta forza
equilibrante.
Un esempio in cui entra in gioco la forza equilibrante è quello di un
corpo posto su un tavolo. Sappiamo che ogni corpo dotato di massa è
soggetto a una forza peso. Perché allora il corpo risulta essere in equilibrio? Evidentemente perché esiste una forza in grado di equilibrare la
forza peso del corpo: il tavolo, con la sua presenza, esercita una forza
L’EQUILIBRIO
7
sul corpo uguale ed opposta alla forza peso. Questa particolare forza equilibrante prende il nome di reazione vincolare del piano; vedi
figura 5.
−
→
Rv
−
→
Fp
−
→
→
−
→
−
Rv + F p = 0
Figura 5. Esempio di reazione vincolare.
Ovviamente la forza peso di un corpo può essere equilibrata anche
per mezzo di più forze, come nel caso dell’insegna in figura tenuta in
equilibrio grazie alla tensione esercitata da due fili; vedi figura 6.
−
→
F2
−
→
F1
−
→
→
−
→
−
→
−
F1+ F2+ Fp= 0
−
→
Fp
Figura 6. Insegna sospesa da due fili.
Usando la regola del parallelogramma è facile verificare graficamente
che la somma vettoriale delle due tensioni esercitate dai fili obliqui
8
L’EQUILIBRIO
è esattamente uguale alla forza peso dell’insegna. In questo modo la
risultante di tutte le forze è uguale a zero e l’insegna risulta in equilibrio.
2.3. Piano inclinato. Consideriamo un piano inclinato di altezza AC =
h e lunghezza AB = l, come nella figura 7 dove, per semplicità, un
carrello di massa m è rappresentato da una sferetta.
−
→
F pk
A
−
→
Fp
−
→
F p⊥
B
C
Figura 7. Piano inclinato.
Quando l’attrito è assente, la forza totale che agisce sul carrello è
→
−
→
−
data dalla componente parallela ( F pk ) della forza peso F p ovvero,
considerando il modulo abbiamo che Fp = m · g, dove g = 9.81 N/kg.
→
−
La componente perpendicolare ( F p⊥ ) al piano della forza peso è infatti compensata dalla reazione vincolare del piano inclinato. È facile
rendersi conto che i triangoli ABC ed il triangolo formato dai vetto→
−
ri che scompongono la forza F p sono simili, pertanto hanno i lati in
proporzione, in particolare
AB : Fp = AC : Fpk
da cui
l : mg = h : Fpk .
La componente parallela della forza peso, che provoca lo scivolamento
del corpo lungo il piano, viene pertanto ad essere uguale a
mgh
Fpk =
.
l
È interessante considerare due casi limite.
• Piano orizzontale: in questo caso l’altezza del piano è uguale
a 0, ossia h = 0, da cui la componente parallela della forza peso
Fpk = 0. Rimane solo la componente perpendicolare della forza
peso che è interamente compensata dalla reazione vincolare del
piano. Di conseguenza la forza totale applicata al corpo è zero
e il corpo rimane in equilibrio.
L’EQUILIBRIO
9
• Piano verticale: in questo caso h = l e la componente parallela della forza peso viene a coincidere con la forza peso mg.
Il corpo non risente di alcuna reazione vincolare da parte del
piano e cade liberamente.
Un piano inclinato (ad esempio una strada in salita o in discesa) può
essere caratterizzato dalla sua pendenza percentuale, definita come il
rapporto tra i due cateti del triangolo ABC, moltiplicato per 100:
pendenza percentuale =
AC
· 100.
BC
La forza equilibrante nel caso di un piano inclinato sarà una forza diretta lungo il piano inclinato, avente la stessa intensità della
componente parallela della forza peso Fpk e verso opposto.
3. Forze d’attrito
3.1. Attrito radente statico. Supponiamo di applicare una forza
non troppo intensa alla cattedra. Quello che notiamo è che, nonostante la presenza di una forza attiva, la cattedra non si muove, ossia
siamo in presenza di una situazione di equilibrio. Questo vuol dire che
esiste un’altra forza che agisce sulla cattedra e che è in grado di bilanciare la forza che noi applichiamo: questa forza è la forza di attrito
statico. Se applichiamo una forza maggiore alla cattedra, notiamo
che la cattedra rimane ancora in equilibrio. Ad un certo punto però,
aumentando ulteriormente l’intensità della forza applicata, osserviamo
che la cattedra comincia a muoversi. Da queste e altre osservazioni
possiamo dedurre che le proprietà principali della forza d’attrito sono
quelle di:
(1) essere una forza resistente, ossia una forza che si oppone al
moto, una forza che ha un effetto puramente passivo,
(2) avere un’intensità che varia tra 0 e un valore massimo, uguale
all’intensità della forza che dobbiamo applicare al corpo per
metterlo in movimento.
Da quanto abbiamo detto sopra non esiste una formula che permette di quantificare in maniera del tutto generale la forza d’attrito.
È possibile però esprimere tramite una formula quanto vale la forza
d’attrito massima. In particolare, si può verificare sperimentalmente
che su un piano orizzontale la forza d’attrito massima è direttamente
proporzionale al peso P del corpo:
FaMax = ks · P.
10
L’EQUILIBRIO
Il coefficiente di proporzionalità ks prende il nome di coefficiente di
attrito statico. Tale coefficiente varia a seconda delle caratteristiche delle superfici a contatto. A livello microscopico infatti la forza
d’attrito è dovuta al fatto che le superfici a contatto non sono mai perfettamente lisce ma presentano delle irregolarità e delle rugosità che
costituiscono un ostacolo per il movimento. Maggiori sono queste irregolarità maggiore sarà il coefficiente di attrito statico.
Per riuscire a mettere in movimento un corpo dobbiamo riuscire
a vincere preliminarmente la forza d’attrito, ossia dobbiamo riuscire ad applicare una forza F maggiore della forza d’attrito massima
FaMax . In questo caso infatti la risultante R delle forze risulta essere
R = F − FaMax > 0. Se invece la forza F è minore della forza d’attrito
massima F < FaMax , allora la forza d’attrito è uguale ed opposta alla
forza attiva F e il corpo rimane in equilibrio.
Da queste considerazioni risulta facile trovare una possibile procedura per misurare il coefficiente di attrito statico: la forza di primo distacco, ossia la forza che dobbiamo applicare per mettere in movimento
un corpo coincide con la forza d’attrito massima FaMax . Misurando tale
forza e il peso P dell’oggetto con un dinamometro, possiamo ricavarci
il coefficiente d’attrito statico dal seguente rapporto
FaMax
.
P
Essendo il rapporto tra due forze, ossia tra due grandezze omogenee,
il coefficiente di attrito statico è un numero puro che varia a seconda
delle superfici a contatto.
ks =
3.2. Attrito radente dinamico. Una volta che siamo riusciti a mettere in movimento la cattedra, la forza d’attrito non scompare dal momento che non possiamo pensare di aver eliminato del tutto le irregolarità tra le superfici a contatto. Permane una forza d’attrito dinamica,
proporzionale al peso del corpo:
Fad = kd · P.
Quello che cambia è il coefficiente di attrito: il coefficiente d’attrito
dinamico risulta essere infatti sempre minore rispetto al caso statico:
kd < ks .
Per fissare le idee, riportiamo nella tabella 1 i valori medi dei coefficienti di attrito statico e dinamico per una serie di superfici a contatto.
L’EQUILIBRIO
11
ks
kd
metallo–metallo
0.25
0.15
metallo–legno
0.5
0.4
legno–legno
0.55
0.35
pneumatici–strada
0.8
0.65
acciaio–ghiaccio
0.03 0.015
legno–neve
0.05
Superfici a contatto
0.03
Tabella 1. Alcuni coefficienti di attrito statico e dinamico.
Prima di procedere, vogliamo fare una precisazione importante: la formula che abbiamo introdotto per l’attrito statico, FaMax = ks · P , è
corretta solo se non ci sono altre forze applicate al corpo oltre alla forza peso. In caso contrario, la formula va modificata in FaMax = ks · F⊥ ,
dove la forza peso P è stata sostituita con F⊥ , componente perpendicolare al piano della forza totale applicata al corpo. Ad esempio,
se premiamo con la mano sul corpo che vogliamo muovere andiamo
ad aggiungere alla forza peso un’altra forza perpendicolare e la forza
d’attrito risulta di conseguenza maggiore. Questa considerazione vale
anche nel caso dell’attrito dinamico la cui formula corretta diventa:
Fad = kd · F⊥ . In particolare, se la forza esterna F è diretta verso il
piano d’appoggio avremo che F⊥ = P + F e la forza d’attrito aumenta:
Fa = k · (P + F ). Se invece la forza esterna ha verso opposto rispetto alla forza peso, allora F⊥ = P − F e la forza d’attrito diminuisce:
Fa = k · (P − F ).
Un’altra importante forma d’attrito è costituita dalla forza d’attrito
volvente che si ha quando un corpo, ad esempio una ruota, rotola su
un piano. In questo caso, l’intensità della forza d’attrito volvente si
calcola mediante la formula
Fav = kv ·
F⊥
,
r
dove kv è il coefficiente d’attrito volvente, F⊥ è la forza perpendicolare
al piano ed r è il raggio del corpo che rotola. In generale, la forza
d’attrito volvente è minore sia della forza d’attrito radente statico che
della forza d’attrito radente dinamico.
12
L’EQUILIBRIO
4. Equilibrio per rotazioni
4.1. Momento di una forza. Per introdurre il concetto di momento di una forza partiamo dalla seguente domanda: perché nelle porte
le maniglie sono sempre dalla parte opposta rispetto ai cardini? Supponiamo di voler aprire un vecchio portone poco oliato. Dalla nostra
esperienza sappiamo che si fa meno fatica (in altre parole, è sufficiente
applicare una forza minore) spingendo il portone dalla parte opposta
rispetto ai cardini. Altro esempio che ci può aiutare è quello della chiave inglese e del bullone. Anche in questo caso è molto più facile ruotare
il bullone applicando la forza all’estremità del manico della chiave inglese, ossia nel punto più lontano rispetto al punto attorno al quale
avviene la rotazione. Da tutti questi esempi ricaviamo che, in presenza
di un corpo che può ruotare, gli effetti di una forza applicata al corpo
dipendono da tre fattori:
(1) l’intensità della forza: se applichiamo una forza maggiore, la
rotazione del bullone o del portone risulta essere agevolata;
(2) il punto di applicazione della forza: a parità di intensità la
rotazione è notevolmente agevolata se applichiamo la forza nel
punto più lontano dal centro di rotazione;
(3) la direzione della forza: se applichiamo una forza diretta lungo
il manico della chiave inglese non si verifica alcuna rotazione.
b
O
−
→
F
Figura 8. Forza e braccio.
Nella figura 8 O è il punto attorno al quale avviene la rotazione (ad
esempio il centro del bullone), b è la distanza tra la retta d’azione della
forza e il punto attorno al quale avviene la rotazione. Questa distanza
prende anche il nome di braccio della forza. Il momento di una
forza M si definisce come il prodotto dell’intensità F della forza per
la lunghezza b del braccio:
M = F · b.
Dal momento che nel Sistema Internazionale la forza si misura in Newton (N) e il braccio in metri (m) l’unità di misura del momento della
forza è il Newton per metro (N · m). Ad esempio, se l’intensità della
forza è F = 5 N e il braccio misura b = 6 cm avremo un momento della
L’EQUILIBRIO
13
forza pari a M = 5 N · 0.06 m = 0.3 Nm. Come casi particolari, se
la retta d’azione della forza passa per il centro di rotazione O abbiamo
che b = 0. In questo caso il momento della forza si annulla e non si
verifica alcuna rotazione.
Il momento di una forza è la grandezza che regola i movimenti di
rotazione. A questo punto è chiaro che possiamo aumentare il momento
M sia aumentando l’intensità della forza F sia aumentando il braccio
b: questo è il motivo per cui il portone si apre più facilmente se lo
spingiamo dalla parte opposta rispetto ai cardini o per cui il bullone
si allenta più facilmente spingendo una chiave inglese all’estremità del
manico. Per convenzione si associa un segno alle rotazioni: il momento
di una forza è un numero positivo se le rotazioni che esso provoca sono
antiorarie, è invece un numero negativo se le rotazioni che esso induce
sono orarie. Questa convenzione sarà di fondamentale importanza nella
prossima sezione, dove andremo a stabilire quali sono le condizioni di
equilibrio di un corpo che può ruotare.
4.2. Condizione di equilibrio. Abbiamo visto che, nel caso dei moti
di traslazione, la condizione di equilibrio è data dall’annullarsi della
risultante delle forze applicate al corpo. Vogliamo ora chiarire qual è la
condizione di equilibrio per un corpo che è libero di ruotare. Abbiamo
visto nella precedente sezione che il momento di una forza assume segni
positivi o negativi a seconda del senso in cui avviene la rotazione. La
condizione di equilibrio per rotazioni è data dall’annullarsi della somma
di tutti i momenti che vengono applicati al corpo, ossia:
Mtot = M1 + M2 + M3 + · · · = 0.
Se prescindiamo dai segni, possiamo anche dire che un corpo non ruota
quando la somma di tutti i momenti orari applicati al corpo è uguale
alla somma di tutti i momenti antiorari. Questa è la condizione di
equilibrio per rotazioni.
Come esempio di equilibrio per rotazioni consideriamo una bilancia
a bracci diseguali, come nella figura 9.
Il peso P1 induce una rotazione antioraria di momento M1 = P1 ·b1 , il
peso P2 induce invece una rotazione oraria di momento M2 = −P2 · b2 .
La bilancia sarà in equilibrio non quando i due pesi sono uguali ma
quando si annulla il momento totale: Mtot = M1 + M2 = 0, ossia
quando il momento antiorario P1 · b1 è uguale al momento orario P2 · b2 .
14
L’EQUILIBRIO
b1
b2
−
→
P2
−
→
P1
Figura 9. Condizione di equilibrio per le rotazioni.