DINAMICA
Equilibrio idrodinamico
Legge di Newton:
∑ F = mA
i
i
Forze agenti:
Forze di massa + Forze di superficie = Forze di inerzia
G
Forze di massa = ρ fdxdydz
JG
f = Accelerazione del campo, ovvero forza per
unità di massa
JG
Forze di inerzia = ρ Adxdydz
JG
A = Accelerazione del moto
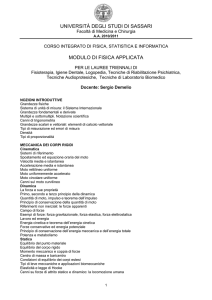
DINAMICA
Forze di superficie
Consideriamo
l’elementino
infinitesimo e
vediamo cosa
succede a
coppie di facce
parallele.
z
Φ xz = τ xz
dz
Φ xy = τ xy
( )
⎡
⎤
∂ Φx
− ⎢Φ x +
dx ⎥
∂x
⎢
⎥
⎣
⎦
JJJG
Φx
x
Φ xx = σ x
dy
Faccia di
normale x
dx
y
DINAMICA
Risultante forze agenti su facce di normale x:
−
JJJG
∂ Φx
( ) dxdydz
∂x
e analogamente per le altre coppie di facce,
Quindi facendo la somma di tutte le forze si
arriva a:
ρ
(
G JG
f −A =
)
JJJG
∂ Φx
JJJG
∂ Φy
JJG
∂ Φz
∂x
∂y
∂z
( )+ ( )+ ( )
Equazione indefinita del
moto o della dinamica dei
fluidi
dove:
JJJG
∂ Φx
JJJG
∂ Φy
JJG
∂ Φz
∂x
∂y
∂z
( ) + ( ) + ( ) = div ( ΦJJJG )
JJJG
Dove Φ T è il tensore degli sforzi.
T
ρ
(
JJJG
G JG
f − A = div ( Φ T )
)
DINAMICA
Dopo una lunga serie di passaggi, si può riscrivere l’eq. indefinita del moto
anche in questa forma:
JG JG
JG 1
JG
2
ρ f − A = grad ( P ) − μ∇ V − μ grad ⎡ div V ⎤
⎣
⎦
3
(
)
( )
Equazione di Navier-Stokes
Se il fluido è perfetto, cioè ha solo sforzi normali (pressione) mentre gli sforzi
tangenziali sono nulli, si ottiene:
ρ
(
G JG
f − A = grad P
)
Equazione indefinita della dinamica dei
fluidi perfetti o equazione di Eulero
DINAMICA
Se integriamo sull’intero volume l’eq. indefinita della dinamica dei fluidi perfetti,
si ottiene dopo molti passaggi:
G+Π+M +I =0
dove:
G=
Π=
M =
∫
w
∫
∫
A
A
Equazione globale dell’equilibrio
dinamico per i fluidi perfetti
G
ρ fdw
G
P n dA
ρ VV n dA
( ) ⎞⎟dW
⎛ ∂ ρV
G
I = −∫ ⎜
w⎜
∂t
⎝
⎟
⎠
JJG
M
[N]
(Flusso di) quantità di moto
attraverso la superficie A
G
I
[N]
Inerzie locali
Osservazione su
JJG
M
DINAMICA
:
M =
∫
A
ρ VV n dA
M1
: contributo relativo alla porzione con V entrante
Vn > 0
M2
: contributo relativo alla porzione con V uscente
Vn < 0
M3
: contributo relativo alla porzione con V tangente
Vn = 0
G + Π + M1 − M 2 + I = 0
G
Osservazione su I :
( ) ⎞⎟dW
⎛ ∂ ρV
G
I = −∫ ⎜
w⎜
∂t
⎝
Se fluido incomprimibile e moto permanente
⎟
⎠
G
I =0
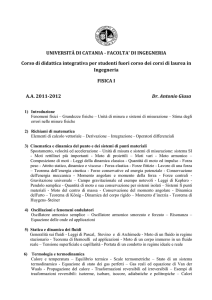
APPLICAZIONE EQ. GLOBALE
V0
Spinta di un getto su una piastra piana
D
E
y
- M2
Ipotesi :
2
ρ = cost e fluido perfetto
JG
∂V
=0
∂t
Volume di controllo
moto permanente
A
x
D
V0
B
JJG JG JJJG JJJG G
Π + G + M1 − M 2 + I = 0
M1
- M2
2
C
F
JJG JJG
JJG
JJG
JJG
JJG
JJG
Π = Π AB + Π AD + Π D E + Π CF + Π E F + Π B C
V0
JJG
JJG
JJG
JJG
JJG
Π AB = Π AD = Π DE = Π CF = Π BC = 0 Superfici a pressione atmosferica
JG
Spinta del volume sulla superficie della piastra diretta secondo x
S
JG
JJG
S = −Π EF
Proiettiamo l’eq. globale nel piano orizzontale:
JG JJJG JJJG
−S + M1 − M 2 = 0
JJJG
M1 =
∫
A
ρ VV n dA =
JJJG
M2
Q
−
= ρ V0
2
2
Quindi:
JG
G=0
2
2
2
ρ
V
dA
=
ρ
V
dA
=
ρ
V
0 ∫
0 A = ρ V0 Q
∫ 0
A
A
ma contributi uguali e opposti diretti secondo y
JG JJJG
S = M1
2
D
S = ρ V 0 2π
4
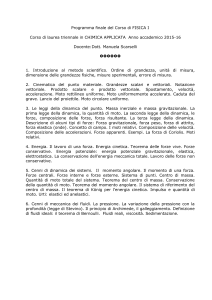
TEOREMA DI BERNOULLI
G
b
IPOTESI:
- fluido perfetto
- fluido incomprimibile
- moto su una traiettoria
G
s
S
P
G
n
Partiamo dall’ Equazione di Eulero
ρ
(
G JG
f − A = grad ( p )
)
Nel campo gravitazionale
⎛
dV
ρ ⎜⎜ − ggrad ( z ) −
dt
⎝
G
f = − g grad ( z )
⎞
⎟⎟ = grad ( p )
⎠
dV
−γ grad ( z ) − ρ
= grad ( p )
dt
⎛
p⎞
1 dV
grad ⎜ z + ⎟ = −
γ⎠
g dt
⎝
TEOREMA DI BERNOULLI
L’accelerazione è:
dV
dV G V 2 G
A=
=
s+
n
dt
dt
r
Proiettando questa equazione vettoriale sui tre assi della terna intrinseca, si
ottiene:
Lungo s:
Lungo n:
Lungo b:
∂
P
1 dV
(z + ) = −
∂s
g dt
γ
∂
P
1 V2
(z + ) = −
∂n
g r
γ
∂
P
(z + ) = 0
∂b
γ
(1)
(2)
(3)
Osservazioni:
- lungo b: distribuzione idrostatica della pressione
- lungo n: se traiettoria è quasi rettilinea, cioè r
∞, allora la distribuzione di
pressione è idrostatica
TEOREMA DI BERNOULLI
Consideriamo l’eq. 1:
∂
P
1 dV
(z + ) = −
g dt
∂s
γ
(1)
Applichiamo la regola di derivazione euleriana alla velocità:
V = V (t ; s (t ) )
dV
∂V
∂ V ds
=
+
dt
∂t
∂ s dt
dV
∂V
∂V
=
+V
dt
∂t
∂s
dV
∂V
∂ ⎛V 2 ⎞
=
+
⎜
⎟
∂t
∂s ⎝ 2 ⎠
dt
e sostituendola nella (1):
P
1 ∂V
1 ∂ ⎛V 2 ⎞
∂
(z + ) = −
−
⎜
⎟
∂s
γ
g ∂t
g ∂s ⎝ 2 ⎠
P
1 ∂V
∂
∂ ⎛V 2 ⎞
(z + ) = −
−
⎜
⎟
∂s
∂s ⎝ 2 g ⎠
γ
g ∂t
TEOREMA DI BERNOULLI
∂
∂s
⎛
P V2 ⎞
1 ∂V
⎜z+ +
⎟=−
2g ⎠
γ
g ∂t
⎝
Se il moto è permanente:
∂
∂s
Teorema di Bernoulli per il
moto vario
⎛
P V2 ⎞
⎜z+ +
⎟=0
γ
2g ⎠
⎝
2
p V
H = z+ +
= costante
γ 2g
carico totale
altezza geodetica
altezza cinetica
altezza piezometrica
Teorema di Bernoulli per il
moto permanente
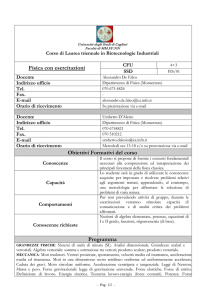
TEOREMA DI BERNOULLI
Linea dell’energia o dei carichi totali
2
p V
= costante
H = z+ +
γ 2g
2
V A
2g
V 2B
2g
V 2C
2g
Linea piezometrica
energia
totale
energia
potenziale
energia di
pressione
energia
cinetica
In termini energetici, questi 3 termini
sono energia dell’unità di peso. Infatti:
Epotenziale = mgz = (mg ) z
1
1
V2
2
Ecinetica = mV = (mg )
2
2
g
Peso=1
Peso=1
=z
1V2
=
2 g
Epressione = energia legata alla pressione di una particella di peso unitario