Analisi Matematica II, Anno Accademico 2014-2015
Ingegneria Edile, Civile, Ambientale
Paolo Acquistapace, Laura Cremaschi, Vincenzo M. Tortorelli
20 luglio 2015 - terzo appello - prima parte (un’ora)
N. matr./anno iscr.
Cognome
docente/ crediti
Nome
Istruzioni al fine della valutazione:
- compilate l’intestazione in stampatello. Ai quesiti contrassegnati con [12] deve rispondere
chi deve farsi riconoscere 12 crediti.
- scrivete solo le risposte su questo foglio, l’unico da restituire;
-ricopiate a parte le vostre risposte per confrontarle con quelle ufficiali.
————————————————————————————————————————–
* 1 1 1 1 +
Esercizio 1 Calcolare A = 1 × −1 , 0 × −2 . A =
1
1
1
1
————————————————————————————————————————–
n
Esercizio 2 Si consideri la successione di funzioni fn (x) = e−(x ) , x ≥ 0.
(a) Per quali a ≥ 0 la successione converge uniformemente in [0; a]?
(a)
(b) Per quali a ≥ 0 la successione converge in L1 (0; a)?
(b)
————————————————————————————————————————–
Esercizio 3 Si consideri la funzione z = z(x, y) definita implicitamente, in un intorno di
√
√
√
( π, − π, 0), dall’equazione 2y + x + cos(x + y + z) − sin(zxy) = 1 − π. Se ne calcoli la
√
√
∂z √
∂z √
derivata
( π, − π).
( π, − π) =
∂y
∂y
————————————————————————————————————————
Esercizio 4 Si classifichino i punti critici della funzione f (x, y, z) = x1 + y1 + z1 + xyz.
p.min.rel. =
, p.max.rel. =
, p.sella =
————————————————————————————————————————–
R
Esercizio 5 Calcolare l’integrale di superficie I = Σ (x + y + z) dσ, ove
Σ = {(x, y, z) : 0 ≤ x ≤ 2, x2 = y 2 + z 2 }.
I=
————————————————————————————————————————–
Esercizio 6 Sia data l’applicazione Φλ (x, y) = (x + λ, y + eλy ) =: (u, v), e sia B il disco
determinato dalla disequazione x2 + y 2 ≤ 1. Si calcoli
" Z
#
d
D=
u dudv
.
D=
dλ Φλ (B)
λ=0
————————————————————————————————————————–
Esercizio 7 Calcolare il flusso Φ del campo vettoriale
F (x, y, z) = (x + sin(y + z), cos(x + y + z), z 2 cos(x + y + z))
uscente dalla superficie S = {(x, y, z) : max{|x|, |y|, |z|} = 1}.
Φ=
————————————————————————————————————————–
Esercizio 8 Calcolare il flusso Ψ del campo vettoriale G(x, y, z) = (y − x, y − z, z) attraverso
la semisfera Σ = {(x, y, z) : x2 +y 2 +z 2 = 1, z ≥ 0}, orientata dal versore normale v = (0, 0, 1)
nel punto P = (0, 0, 1).
Ψ=
————————————————————————————————————————–
[12] Esercizio 9 Si calcolino i coefficienti di Fourier della funzione 3x − 5, x ∈ [−π; π].
an =
bn =
Analisi Matematica II, Anno Accademico 2014-2015
Ingegneria Edile, Civile, Ambientale
Paolo Acquistapace, Laura Cremaschi, Vincenzo M. Tortorelli
20 luglio 2015 - terzo appello - prima parte (un’ora)
Studenti ex Galatolo-Georgiev.
N. matr./anno iscr.
Cognome
docente/ crediti
Nome
Istruzioni al fine della valutazione:
- compilate l’intestazione in stampatello; Ai quesiti contrassegnati con [12] deve rispondere chi
deve farsi riconoscere 12 crediti.
- scrivete solo le risposte su questo foglio, l’unico da restituire;
-ricopiate a parte le vostre risposte per confrontarle con quelle ufficiali.
————————————————————————————————————————–
R
Esercizio 1 Calcolare l’integrale I = A xy dxdy, ove
A = {(x, y) ∈ R2 : 0 ≤ y(x2 + 1) ≤ 1 ≤ x}.
A=
————————————————————————————————————————–
1
Esercizio 2 Si consideri la successione di funzioni fn (x) = 1+x
n , x ≥ 0.
(a) Per quali a ≥ 0 la successione converge uniformemente in [0; a]?
a∈
(b) Per quali a ≥ 0 la successione converge uniformemente in [a; +∞[ ?
a∈
————————————————————————————————————————–
Esercizio 3 Si consideri la funzione z = z(x, y) definita implicitamente, in un intorno di
√
√
√
( π, − π, 0), dall’equazione 2y + x + cos(x + y + z) − sin(zxy) = 1 − π. Se ne calcoli la
√
√
∂z √
∂z √
derivata
( π, − π).
( π, − π) =
∂x
∂x
————————————————————————————————————————
Esercizio 4 Si classifichino i punti critici della funzione f (x, y, z) = x1 + y1 + z1 + xyz.
p.min.rel. =
, p.max.rel. =
, p.sella =
————————————————————————————————————————–
R
Esercizio 5 Calcolare l’integrale di superficie I = Σ (x + y + z) dσ, ove
Σ = {(x, y, z) : 0 ≤ x ≤ 2, x2 = y 2 + z 2 }.
I=
————————————————————————————————————————–
Esercizio 6 Data l’equazione differenziale y 0 (x) = sin y(x), se ne trovino le soluzioni stazionarie
(punti fissi), asintoticamente stabili per x → +∞, comprese fra −4 e 5.
y=
————————————————————————————————————————–
Esercizio 7 Calcolare il flusso Φ del campo vettoriale
F (x, y, z) = (x + sin(y + z), cos(x + y + z), z 2 cos(x + y + z))
uscente dalla superficie S = {(x, y, z) : max{|x|, |y|, |z|} = 1}.
Φ=
————————————————————————————————————————–
Esercizio 8 Calcolare il flusso Ψ del campo vettoriale G(x, y, z) = (y − x, y − z, z) attraverso
la semisfera Σ = {(x, y, z) : x2 +y 2 +z 2 = 1, z ≥ 0}, orientata dal versore normale v = (0, 0, 1)
nel punto P = (0, 0, 1).
Ψ=
————————————————————————————————————————–
[12]Esercizio 9 Si calcolino i coefficienti di Fourier della funzione 3x − 5, x ∈ [−π; π].
an =
bn =
Analisi Matematica II, Anno Accademico 2014-2015
Ingegneria Edile, Civile, Ambientale
Paolo Acquistapace, Laura Cremaschi, Vincenzo M. Tortorelli
20 luglio 2015 - terzo appello - seconda parte (due ore)
N. matr./anno iscr.
Cognome
docente/ crediti
Nome
Istruzioni al fine della valutazione: compilare l’intestazione in stampatello.
Si risolva almeno un esercizio, in tutti i punti, riportando con ordine lo svolgimento della
soluzione e motivandolo accuratamente.
————————————————————————————————————————–
Esercizio 1 (a) Si analizzi l’intersezione dei grafici delle due funzioni
u(x, y) = x + y 2 ,
v(x, y) = 2x2 + 2y 4 ,
mettendo in risalto: se tale intersezione è limitata in R3 , e se esistono punti nell’intorno dei
quali essa non è sostegno di una curva regolare.
(b) Si disegnino in modo approssimativo ma esauriente gli insiemi di livello delle funzioni u e
v sopra definite.
(c) Si individui sotto forma di luogo di zeri l’insieme dei punti del piano ove gli uni sono
tangenti agli altri.
————————————————————————————————————————–
Esercizio 2 Siano date due funzioni reali u ∈ C 1 (R3 ) e v ∈ C 2 (R3 ).
(a) Si consideri il campo W (x, y, z) = (y, −x, 1)+u(x, y, z)∇v(x, y, z). Si mostri che rot W ≡ 0
se e solo se
∂u
∂v
∂z = ∂z = 0
∂u ∂v ∂u ∂v
−
= 2.
∂x ∂y
∂y ∂x
(b) Nel caso in cui W = ∇w per qualche potenziale w ∈ C 2 (R3 ), si provi che la mappa
Ψ(x, y, z) = (u, v, w) da R3 in sé è localmente invertibile in ogni punto di R3 .
————————————————————————————————————————–
Risoluzione - prima parte A. A. 2014-15
Esercizio 1 Per la formula di Cauchy-Binet, dati A, B, C, D ∈ R3 , scritti come vettori
colonna, si ha:
h(A × B) , (C × D)i = det[t (A|B) (C|D)].
Nel nostro caso, quindi,
1 1
1
1
1
2 0
0 −2
det
= det
= 8.
1 −1 1
2 4
1 1
Esercizio 2 (a) Analizziamo anzitutto la convergenza puntuale. Fissato x ≥ 0, vi sono tre
casi: x < 1, x = 1 e x > 1. Nel primo caso si ha xn → 0 e quindi fn (x) → 1 per n → ∞;
nel secondo caso è xn = 1 e fn (x) = e−1 per ogni n ∈ N; nel terzo caso risulta xn → +∞ e
pertanto fn (x) → 0 per n → ∞. Dunque
se 0 ≤ x < 1
1
−1
e
se x = 1
lim fn (x) =
n→∞
0
se x > 1.
Per la convergenza uniforme in [0; a], notiamo che se a < 1 si ha
n
n)
sup |fn (x) − 1| = sup (1 − e−(x ) ) = 1 − e−(a
x∈[0;a]
→0
per n → ∞,
x∈[0;a]
quindi fn converge uniformemente a 1 in [0; a] per ogni a ∈ ]0; 1[ .
Invece se a ≥ 1 non può aversi convergenza uniforme in [0; a], perché tutte le fn sono funzioni
continue su [0; a] mentre il limite è discontinuo nel punto 1 ∈ [0; a].
(b) Per ogni a ≥ 0 e n ≥ 2 si ha, essendo xn ≥ x2 per x ≥ 1,
1
se 0 ≤ x ≤ 1
0 ≤ fn (x) ≤ g(x) =:
2)
−(x
e
se x ≥ 1,
quindi vi è convergenza dominata. Per il teorema di Lebesgue, dunque, le fn convergono al
loro limite puntuale in L1 (a; +∞).
Esercizio 3 Posto f (x, y, z) = 2y + x + cos(x + y + z) − sin(zxy) − 1, si ha
1 − sin(x + y + z) − zy cos(x + y + z)
∇f (x, y, z) = 2 − sin(x + y + z) − zx cos(x + y + z) ,
− sin(x + y + z) − xy cos(x + y + z)
√
√
e quindi ∇f ( π, − π, 0) = (1, 2, π). Dunque siamo nelle ipotesi del teorema del Dini, e
√
√
possiamo esplicitare la z, almeno in un intorno di ( π, − π, 0), come funzione delle altre due
√
√
variabili. La funzione implicita z(x, y) verifica pertanto z( π, − π) = 0. Derivando l’identità
√
2y + x + cos(x + y + z(x, y)) − sin(xyz(x, y)) = 1 − π
rispetto ad x e rispetto ad y, si ottengono le due relazioni
(
1 − (1 + zx (x, y)) sin(x + y + z(x, y)) − (yz(x, y) + xyzx (x, y)) cos(xyz(x, y)) = 0
2 − (1 + zy (x, y)) sin(x + y + z(x, y)) − (xz(x, y) + xyzy (x, y) cos(xyz(x, y)) = 0,
le quali, valutate per x =
√
√
π, y = − π e quindi z = 0, danno
√
√
1
zx ( π, − π) = − ,
π
√
√
2
zy ( π, − π) = − .
π
Esercizio 4 Imponendo la condizione di punto critico
1
1
1
∇f (x, y, z) = − 2 + yz, − 2 + xz, − 2 + xy = (0, 0, 0),
x
y
z
si ottiene x2 yz = xy 2 z = xyz 2 = 1; dovendo essere non nulle tutte le coordinate, si deduce
x = y, y = z e quindi x4 = 1. Pertanto gli unici punti critici sono P (1, 1, 1) e M (−1, −1, −1).
Per verificarne il tipo, si considera in prima istanza la matrice Hessiana valutata nei punti
critici:
2
z
y
x3
2
1
1
2
z
x
(±1, ±1 ± 1) = ± 1 2 1 .
3
y
1 1 2
2
y
z
z3
Utilizzando per esempio il criterio della variazione del segno dei determinanti dei minori diagonali, si ottiene che P (1, 1, 1) è un punto di minimo relativo, e M (−1, −1, −1) è un punto di
massimo relativo.
Esercizio 5 L’insieme Σ è un pezzo di cono equilatero con asse il segmento (t, 0, 0), 0 ≤ t ≤ 2.
È in effetti, a parte il suo vertice, una 2-varietà. Una sua parametrizzazione è data da
p
(x, y, z) = ( y 2 + z 2 , y, z),
(y, z) ∈ D,
ove D = {(y, z) ∈ R2 : y 2 + z 2 ≤ 4}. Quindi si tratta di un grafico rispetto alle variabili
(y, z), e l’integrale diventa, utilizzando le coordinate polari,
s
Z
Z p
y2
z2
I =
(x + y + z) dσ =
y2 + z2 + y + z
1+ 2
+
dydz =
y + z2 y2 + z2
Σ
D
Z 2π Z 2
√ Z 2 2
√
16 √
=
r(1 + cos ϑ + sin ϑ) 2 r drdϑ = 2π 2
r dr =
π 2.
3
0
0
0
Esercizio 6 Per prima cosa si trasforma l’integrale del quale si deve fare la derivata, in
modo che la variabile λ si trovi solo nell’integrando. Utilizziamo il cambiamento di coordinate
(u, v) = φλ (x, y): essendo
1
0
det DΦλ (x, y) = det
= 1 + λ eλy ,
0 1 + λ eλy
si ottiene
Z
Z
u dudv =
Φλ (B)
(x + λ)(1 + λ eλy )dxdy.
B
A questo punto osserviamo che l’integrando è derivabile rispetto a λ, con
∂
(x + λ)(1 + λ eλy ) = 1 + λ eλy + (x + λ)(1 + λ y)eλy ,
∂λ
ed inoltre questa derivata è una funzione limitata per (x, y) ∈ B e per |λ| < 1. Quindi si può
derivare sotto il segno di integrale e pertanto
Z
Z
d
d
u dudv =
(x + λ)(1 + λ eλy )dxdy =
dλ Φλ (B)
dλ B
Z
[1 + λ eλy + (x + λ)(1 + λ y)eλy ] dxdy,
=
B
da cui finalmente
"
d
D=
dλ
#
Z
Z
u dudv
Φλ (B)
=
λ=0
(1 + x) dxdy = π.
B
Esercizio 7 La superficie S è la frontiera del cubo C = [−1, 1]3 , quindi è regolare a tratti e
chiusa. Utilizziamo allora il teorema della divergenza: dato che
div F (x, y, z) = 1 − sin(x + y + z) + 2z cos(x + y + z) − z 2 sin(x + y + z),
possiamo scrivere, detto n il versore normale esterno a S:
Z
Z 1Z 1Z 1
Φ = hF · ni dσ =
[1 − sin(x + y + z) + 2z cos(x + y + z) − z 2 sin(x + y + z)] dxdydz.
S
−1
−1
−1
Osserviamo che gli ultimi tre addendi danno luogo a integrali nulli, essendo funzioni dispari
della variabile z su un dominio simmetrico rispetto all’origine: quindi
Z 1Z 1Z 1
Φ=
1 dxdydz = m3 (C) = 8.
−1
−1
−1
Esercizio 8 Conviene evitare il calcolo diretto, ed usare il teorema della divergenza. La
semisfera Σ, unita al disco D = {(x, y, z) : x2 + y 2 ≤ 1, z = 0}, costituisce il bordo della
semipalla B + = {(x, y, z) : x2 + y 2 + z 2 ≤ 1, z ≥ 0}. L’orientazione di ∂B + = S ∪ D coerente
con le ipotesi è quella indotta dalla normale esterna, che denotiamo con ν. Per il teorema
della divergenza, essendo div F = 1, si ha
Z
Z
Z
+
m3 (B ) =
div F dxdydz = hF, νi dσ + hF, νi dσ = Ψ + 0,
B+
Σ
D
in quanto nell’ultimo integrale F ha la terza componente nulla in D mentre ν = (0, 0, −1). Si
conclude che, detta B la sfera unitaria di R3 ,
Ψ = m3 (B + ) =
1
2
m3 (B) = π.
2
3
Esercizio 9 I coefficienti di Fourier di una somma di funzioni sono la somma dei corrispondenti coefficienti di Fourier degli addendi. Il primo addendo f (x) = 3x è una funzione dispari,
quindi sarà an = 0 per ogni n ∈ N, mentre
Z
3 π
bn =
x sin nx dx =
π −π
Z π
iπ
3h x
3
6
3
6
=
+
cos nx dx = − (−1)n +
[sin nx]π−π = (−1)n+1 .
− cos nx
2
π
n
πn −π
n
πn
n
−π
Il secondo addendo g(x) = −5 è una funzione pari, e quindi sarà bn = 0 per ogni n ∈ N+ ,
mentre a0 = −5 e an = 0 per ogni n ∈ N+ .
In particolare, la serie di Fourier di f (x) + g(x) = 3x − 5 è
∞
S(x) −
X (−1)n+1
5
+6
sin nx.
2
n
n=1
Risoluzione - prima parte Galatolo-Georgiev
Esercizio 1 L’insieme A si descrive nel modo seguente:
A = (x, y) ∈ R2 : x ≥ 1, 0 ≤ y ≤
1
1 + x2
.
Inoltre la funzione integranda è continua e non negativa. Si può dunque applicare il teorema
di Fubini-Tonelli e procedere con l’integrazione iterata:
!
!
Z
Z +∞ Z 1
Z +∞
Z 1
x2 +1
x2 +1
xy dxdy =
xy dy dx =
x
y dy dx =
A
1
=
1
4
0
Z
1
1
+∞
(x2
2x
1
dx =
2
4
+ 1)
Z
1
+∞
0
dz
1
dx = .
2
(z + 1)
8
Esercizio 2 (a) Analizziamo anzitutto la convergenza puntuale. Fissato x ≥ 0, vi sono tre
casi: x < 1, x = 1 e x > 1. Nel primo caso si ha xn → 0 e quindi fn (x) → 1 per n → ∞; nel
secondo caso è xn = 1 e fn (x) = 21 per ogni n ∈ N; nel terzo caso risulta xn → +∞ e pertanto
fn (x) → 0 per n → ∞. Dunque
1 se 0 ≤ x < 1
1
se x = 1
lim fn (x) =
n→∞
2
0 se x > 1.
Per la convergenza uniforme in [0; a], notiamo che se a < 1 si ha
xn
≤ an → 0
n
x∈[0;a] 1 + x
sup |fn (x) − 1| = sup
x∈[0;a]
per n → ∞,
quindi fn converge uniformemente a 1 in [0; a] per ogni a ∈ ]0; 1[ .
Invece se a ≥ 1 non può aversi convergenza uniforme in [0; a], perché tutte le fn sono funzioni
continue su [0; a] mentre il limite è discontinuo nel punto 1 ∈ [0; a].
(b) Per la convergenza uniforme in [a, ∞[ , se a ≤ 1 si ragiona come prima e si vede che non
può aversi convergenza uniforme in [a; ∞[ , perché tutte le fn sono funzioni continue su [a; ∞[
mentre il limite è discontinuo nel punto 1 ∈ [a; ∞[ .
Invece se a > 1 si ha
1
1
sup |fn (x)| = sup
=
→0
per n → ∞,
n
1 + an
x∈[a;∞[
x∈[a;∞[ 1 + x
quindi fn converge uniformemente a 0 in [a; ∞[ per ogni a ∈ ]1; ∞[ .
Esercizio 3 Posto f (x, y, z) = 2y + x + cos(x + y + z) − sin(zxy) − 1, si ha
1 − sin(x + y + z) − zy cos(x + y + z)
∇f (x, y, z) = 2 − sin(x + y + z) − zx cos(x + y + z) ,
− sin(x + y + z) − xy cos(x + y + z)
√
√
e quindi ∇f ( π, − π, 0) = (1, 2, π). Dunque siamo nelle ipotesi del teorema del Dini, e
√
√
possiamo esplicitare la z, almeno in un intorno di ( π, − π, 0), come funzione delle altre due
√
√
variabili. La funzione implicita z(x, y) verifica pertanto z( π, − π) = 0. Derivando l’identità
√
2y + x + cos(x + y + z(x, y)) − sin(xyz(x, y)) = 1 − π
rispetto ad x e rispetto ad y, si ottengono le due relazioni
(
1 − (1 + zx (x, y)) sin(x + y + z(x, y)) − (yz(x, y) + xyzx (x, y)) cos(xyz(x, y)) = 0
2 − (1 + zy (x, y)) sin(x + y + z(x, y)) − (xz(x, y) + xyzy (x, y) cos(xyz(x, y)) = 0,
le quali, valutate per x =
√
√
π, y = − π e quindi z = 0, danno
√
√
1
zx ( π, − π) = − ,
π
√
√
2
zy ( π, − π) = − .
π
Esercizio 4 Imponendo la condizione di punto critico
1
1
1
∇f (x, y, z) = − 2 + yz, − 2 + xz, − 2 + xy = (0, 0, 0),
x
y
z
si ottiene x2 yz = xy 2 z = xyz 2 = 1; dovendo essere non nulle tutte le coordinate, si deduce
x = y, y = z e quindi x4 = 1. Pertanto gli unici punti critici sono P (1, 1, 1) e M (−1, −1, −1).
Per verificarne il tipo, si considera in prima istanza la matrice Hessiana valutata nei punti
critici:
2
z
y
x3
2 1 1
2
z
x
(±1, ±1 ± 1) = ± 1 2 1 .
3
y
1 1 2
2
y
z
3
z
Utilizzando per esempio il criterio della variazione del segno dei determinanti dei minori diagonali, si ottiene che P (1, 1, 1) è un punto di minimo relativo, e M (−1, −1, −1) di massimo
relativo.
Esercizio 5 L’insieme Σ è un pezzo di cono equilatero con asse il segmento (t, 0, 0), 0 ≤ t ≤ 2.
È in effetti, a parte il suo vertice, una 2-varietà. Una sua parametrizzazione è data da
p
(x, y, z) = ( y 2 + z 2 , y, z),
(y, z) ∈ D,
ove D = {(y, z) ∈ R2 : y 2 + z 2 ≤ 4}. Quindi si tratta di un grafico rispetto alle variabili
(y, z), e l’integrale diventa, utilizzando le coordinate polari,
s
Z
Z p
y2
z2
I =
(x + y + z) dσ =
y2 + z2 + y + z
1+ 2
+ 2
dydz =
2
y +z
y + z2
Σ
D
Z 2π Z 2
√ Z 2 2
√
16 √
r(1 + cos ϑ + sin ϑ) 2 r drdϑ = 2π 2
r dr =
π 2.
=
3
0
0
0
Esercizio 6 Le soluzioni costanti dell’equazione sono y(x) ≡ kπ, k ∈ Z. Quelle che ci
interessano sono quelle comprese tra −4 e 5, e sono solo tre:
y1 (x) ≡ −π,
y2 (x) ≡ 0,
y3 (x) ≡ π.
Essendo f (t) = sin t strettamente crescente in un intorno di t = 0, quindi negativa per valori
negativi vicini a 0 e positiva per valori positivi vicini a 0, se un dato iniziale y0 è vicino a 0,
la corrispondente soluzione y(x) sarà decrescente se y0 < 0 e crescente se y0 > 0; in ogni caso,
essa si allontanerà per x → ∞ dal valore critico 0.
Poiché f (t) = sin t è decrescente in un intorno di t = −π e in un intorno di t = π, essa è
positiva per valori vicini ed inferiori, ed è negativa per valori vicini e superiori: quindi, per dati
iniziali vicini a −π e maggiori di esso, oppure vicini a π e maggiori di esso, la corrispondente
soluzione y sarà decrescente, mentre per dati iniziali vicini a −π e minori di esso, oppure
vicini a π e minori di esso, la corrispondente soluzione y sarà crescente; in entrambi i casi
essa tenderp̀er x → ∞ al valore critico ±π. Pertanto le soluzioni stazionarie asintoticamente
stabili per x → ∞ sono y1 = −π e y3 = π.
Esercizio 7 La superficie S è la frontiera del cubo C = [−1, 1]3 , quindi è regolare a tratti e
chiusa. Utilizziamo allora il teorema della divergenza: dato che
div F (x, y, z) = 1 − sin(x + y + z) + 2z cos(x + y + z) − z 2 sin(x + y + z),
possiamo scrivere, detto n il versore normale esterno a S:
Z
Z 1Z 1Z 1
Φ = hF · ni dσ =
[1 − sin(x + y + z) + 2z cos(x + y + z) − z 2 sin(x + y + z)] dxdydz.
S
−1
−1
−1
Osserviamo che gli ultimi tre addendi danno luogo a integrali nulli, essendo funzioni dispari
della variabile z: quindi
Z 1Z 1Z 1
Φ=
1 dxdydz = m3 (C) = 8.
−1
−1
−1
Esercizio 8 Conviene evitare il calcolo diretto, ed usare il teorema della divergenza. La
semisfera Σ, unita al disco D = {(x, y, z) : x2 + y 2 ≤ 1, z = 0}, costituisce il bordo della
semipalla B + = {(x, y, z) : x2 + y 2 + z 2 ≤ 1, z ≥ 0}. L’orientazione di ∂B + = S ∪ D coerente
con le ipotesi è quella indotta dalla normale esterna, che denotiamo con ν. Per il teorema
della divergenza, essendo div F = 1, si ha
Z
Z
Z
m3 (B + ) =
div F dxdydz = hF, νi dσ + hF, νi dσ = Ψ + 0,
B+
Σ
D
in quanto nell’ultimo integrale F ha la terza componente nulla in D mentre ν = (0, 0, −1). Si
conclude che, detta B la sfera unitaria di R3 ,
1
2
Ψ = m3 (B + ) = m3 (B) = π.
2
3
Esercizio 9 I coefficienti di Fourier di una somma di funzioni sono la somma dei corrispondenti coefficienti di Fourier degli addendi. Il primo addendo f (x) = 3x è una funzione dispari,
quindi sarà an = 0 per ogni n ∈ N, mentre
Z
3 π
x sin nx dx =
bn =
π −π
Z π
iπ
3h x
3
6
3
6
=
− cos nx
+
cos nx dx = − (−1)n +
[sin nx]π−π = (−1)n+1 .
π
n
πn −π
n
πn2
n
−π
Il secondo addendo g(x) = −5 è una funzione pari, e quindi sarà bn = 0 per ogni n ∈ N+ ,
mentre a0 = −5 e an = 0 per ogni n ∈ N+ .
In particolare, la serie di Fourier della funzone f (x) + g(x) = 3x − 5 è
∞
S(x) −
X (−1)n+1
5
+6
sin nx.
2
n
n=1
Risoluzione - seconda parte
Esercizio 1 (a) L’intersezione dei due grafici è l’insieme
x + y2 − z = 0
3
2
2
4
3
Z = {(x, y, z) ∈ R : z = x + y = 2(x + y )} = (x, y, z) ∈ R :
.
2(x2 + y 4 ) − z = 0
L’insieme Z è limitato: infatti se (x, y, z) ∈ Z deve essere soddisfatta l’equazione x + y 2 =
2(x2 + y 4 ), la quale può essere riscritta nella forma
1 2
1 2 1
2
x−
+ y −
= .
4
4
8
Da questa relazione segue subito che la proiezione di Z sul piano xy è limitata: in particolare
1
. Di conseguenza,
se (x, y, z) ∈ Z la coppia (x, y 2 ) sta in un disco di centro ( 14 , 14 ) e raggio 2√
2
considerando una delle due altre eguaglianze che definiscono Z, per esempio z = 2x2 + 2y 4 , si
ottiene anche 0 ≤ z ≤ 21 .
Proviamo che l’insieme Z è localmente una curva regolare. Posto
F (x, y, z) = (x + y 2 − z, 2(x2 + y 4 ) − z),
la matrice Jacobiana
1 4x
DF (x, y, z) = 2y 8y 3
−1 −1
ha rango massimo eguale a due: infatti, imponendo che si annullino i tre minori di ordine 2,
si ottiene il sistema
3
8y = 8xy
8y 3 = 2y
4x = 1,
le cui soluzioni ( 14 , 0), ( 14 , ± 12 ) non soddisfano l’equazione x + y 2 = 2(x2 + y 4 ), che invece deve
essere soddisfatta dalle prime due coordinate di ogni punto di Z.
Pertanto, per il teorema del Dini, Z è localmente sostegno di una curva regolare in ogni suo
punto.
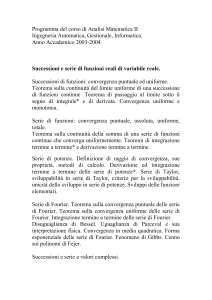
(b) Le curve di livello di u sono le parabole x = −y 2 + c, c ∈ R; quelle di v sono
curve chiuse, a simmetria assiale, di equazioni (x2 + y 4 ) = 2δ = d, d ≥ 0 (per d = 0 la
curbva si riduce a un punto, l’origine). Si osservi che se d > 1 l’asse maggiore è quello
orizzontale, viceversa se d < 1 quello verticale. Un disegno approssimativo è il seguente:
(c) Le curve di livello di u e quelle di v sono fra loro tangenti nei punti (x, y) ∈ R2 , comuni
ad entrambe, nei quali i vettori ∇u(x, y) e ∇v(x, y) sono paralleli: quindi dobbiamo trovare i
punti che risolvono, per qualche λ ∈ R, il sistema
1 = 4λx
2y = 8λy 3
1
Se y = 0 si trova ogni x ∈ R \ {0} (basta scegliere λ = 4x
); quindi la retta y = 0, privata
dell’origine, fa parte del luogo che stiamo cercando. Però, come osservato, l’origine è l’insieme
di livello 0 di v ed è contenuto alla curva di livello 0 di u: dunque possiamo onsiderare questo
caso degenere come un caso di tangenza e quindi inserire nel luogo che stiamo cercando l’intera
retta y = 0.
1
Se invece y 6= 0, si trova λ = 4y12 4 e quindi x = 4λ
= y 2 , ossia fa parte del nostro luogo
anche la parabola x = y 2 . Dunque il luogo dei punti dove le curve di livello di u e di v sono
mutuamente tangenti è descritto dall’equazione y(x − y 2 ) = 0.
Esercizio 2 (a) Calcoliamo anzitutto rot W : essendo
W (x, y, z) = (y + u vx , −x + u vy , 1 + u vz ),
si ha facilmente, tenendo conto di qualche cancellazione,
Dy (1 + u vz ) − Dz (−x + u vy )
uy vz − ux vy
;
ux vz − uz vx
rot W (x, y, z) = Dz (y + u vx ) − Dx (1 + u vz ) =
Dx (−x + u vy ) − Dy (y + u vx )
−2 + ux vy − uy vx
pertanto
rot W (x, y, z) = 0
⇐⇒
uy vz − uz vy = 0
ux vz − uz vx = 0
ux vy − uy vx = 2.
Le prime due equazioni si possono riscrivere come
−vx ux
uz
= 0,
−vy uy
vz
e poiché il determinante della matrice, ux vy − vx uy è non nullo (in virtù della terza equazione),
otteniamo che il sistema precedente equivale a
uz = 0
vz = 0
ux vy − uy vx = 2.
Ne segue la tesi, ossia che il sistema precedente equivale all’annullarsi di rot W .
(b) Supponiamo che W (x, y, z) = ∇w(x, y, z), con w ∈ C 2 (R3 ): in particolare W è irrotazionale e quindi valgono le condizioni
uz = 0
vz = 0
ux vy − uy vx = 2.
Ne segue, essendo W = (wx , wy , wz ),
ux vx
wx
ux vx y + u vx
DΨ(x, y, z) = uy vy −x + u vy = uy vy −x + u vy .
uz vz 1 + u vz
uz vz 1 + u vz
Perciò
ux vx y + u vx
ux vx y
det DΨ(x, y, z) = det uy vy −x + u vy = det uy vy −x = 2 6= 0,
uz vz 1 + u vz
0 0
1
e dunque Ψ è localmente invertibile in ogni punto.