COMPLEMENTI SUI DIFFERENZIALI ESATTI E
L’INTEGRAZIONE DI FORME DIFFERENZIALI
Sergio Console
Derivate parziali (notazione)
Data una funzione z = f (x, y), si può pensare di tener fissa la variabile y (considerandola
quindi come una costante) e di derivare la funzione f (x, y) come funzione della sola
variabile x. Si ottiene il questo modo (ammesso che esista) la derivata parziale di
f (x, y) rispetto a x. La si denota in vari modi:
df
,
dx
dz
,
dx
fx0 ,
Dx f,
D1 f.
In termodinamica è comune evidenziare la variabile che si tiene fissa scrivendo
∂f
.
∂x y
Analogamente per la derivata parziale rispetto ad y .
Spesso nelle applicazioni, ad esempio in termodinamica, ho una relazione tra 3 e più
variabili, ma una la penso costante. Consideriamo ad esempio la legge dei gas ideali:
P V = nRT
dove P è la pressione, R una costante (costante molare), T la temperatura, V è il
volume e n il numero di moli. Posso allora esprimere una variabile in funzione delle altre
tre, ad esempio
nRT
nRT
P =
V =
,...
V
P
Se scrivo
∂P
∂T n,V
intendo che derivo P rispetto a T tenendo n e V costanti. Se scrivo V̄ := V /n (volume
molare) allora ho una relazione tra 3 variabili (invece che tra 4) ed posso esprimerne una
in funzione delle altre due. La legge dei gas ideali si scrive allora
P V̄ = RT
1
e ad esempio
∂P
∂T
V̄
è la derivata di P rispetto a T tenendo V̄ costante.
Derivata totale o della funzione composta
Sia z = f (x, y) e una curva
~r(t) :
x = x(t)
y = y(t)
allora la derivata di f (t) = f (x(t)), y(t)) è data dalla formula della derivata totale
df
∂f
dx
∂f
dy
d~r
=
+
= ∇f ·
dt
∂x y dt
∂y x dt
dt
dove il punto denota il prodotto scalare.
Più in generale, se
f (u, v) = f (u(x, y), v(x, y))
è una funzione composta, si ha la formula di derivazione della funzione composta
∂f
∂u
∂f
∂v
∂f
=
+
∂x y
∂u v ∂x y
∂v u ∂x y
∂f
∂y
=
x
∂f
∂u
che può essere espresso nella forma
e la matrice
v
∂u
∂y
+
x
∂f
∂v
u
∂v
∂y
x
fx0 = fu0 u0x + fv0 vx0
fy0 = fu0 u0y + fv0 vy0
u0x vx0
u0y vy0
è detta matrice jacobiana.
Differenziale esatto
Data la funzione di due variabili f (x, y) si dice differenziale esatto di f
∂f
∂f
df =
dx +
dy
∂x y
∂y x
2
Forme differenziali
Una forma differenziale su D ⊆ R2 è un’espressione del tipo
δU = A(x, y)dx + B(x, y)dy
dove A e B sono funzioni di due variabili definite in D ⊆ R2 .
Un caso particolare ma importante di forma differenziale è il differenziale di una
funzione f (x, y)
∂f
∂f
dx +
dy
df =
∂x y
∂y x
Diciamo che la forma differenziale δU è esatta se è il differenziale di una funzione f cioè
∂f
A(x,
y)
=
∂x y
δU = df
⇐⇒
.
∂f
B(x, y) =
∂y x
La funzione f è detta potenziale di δU e si dice anche che U è una funzione di stato.
Se una forma differenziale non è esatta si dice inesatta.
Osserviamo che in un dominio “fatto di un pezzo solo” (il termine matematico preciso
è “connesso”), il potenziale è determinato a meno di una costante additiva (come una
primitiva, per intendersi).
Osservazione 1 In una variabile una forma differenziale è data da δU = f dx e il
teorema di esistenza delle primitive ci dice che una forma differenziale in una variabile
ammette sempre un potenziale U , cioè una primitiva di f , che è unica a meno di una
costante. Vedremo che invece in due o più variabili non esiste sempre un potenziale e
troveremo condizioni per la sua esistenza.
In termodinamica calore e lavoro elementari (o infinitesimi) δq e δw in un processo
danno in generale esempi di differenziali inesatti, ovvero calore e lavoro non sono funzioni
di stato.
Una condizione necessaria per l’esattezza può essere ricavata facilmente, usando
∂f
∂f
dx +
dy
l’uguaglianza delle derivate seconde miste. Se δU = Adx + Bdy = df =
∂x
∂y
allora
∂A
∂ 2f
∂ 2f
∂B
=
=
=
.
∂y
∂y∂x
∂x∂y
∂x
Diciamo che la forma differenziale δU è chiusa se
∂B
∂A
=
.
∂y
∂x
3
Dunque
δU esatta =⇒ δU chiusa
La condizione è anche sufficiente purchè il dominio di definizione di δU “non abbia
buchi”; si dice precisamente che il dominio è “semplicemente connesso” (si vedano le
note di Benenti, Chanu, Fino, Cap. 7, paragrafo 7.11, per maggiori dettagli).
Un’interpretazione fisica di una forma differenziale è data da un campo vettoriale:
alla forma δU corrisponde il campo
U = (A(x, y), B(x, y)) .
Un campo vettoriale in R2 è una funzione differenziabile che ad ogni punto (x, y) in un
dominio D ⊂ R2 fa corrispondere il vettore di componenti (A(x, y), B(x, y)).
Un campo vettoriale C ∞ su U si scrive, rispetto alla base standard di R2 , nella
forma
f (x, y)
V(x, y) = (f (x, y), g(x, y)) =
,
g(x, y)
dove f e g sono funzioni C ∞ su U .
Il gradiente di una funzione ϕ C ∞ su U è dato dal campo vettorale
,
∇ϕ = ( ∂ϕ
∂x
∂ϕ
).
∂y
Se un campo V è il gradiente di una funzione ϕ, si dice che il campo è conservativo e
la funzione ϕ si dice un potenziale di V . I campi conservativi sono dunque la “nozione
duale” delle forme esatte.
Il rotore di un campo V(x, y) = (f (x, y), g(x, y)) è dato dalla funzione
rotV =
∂g
∂f
−
.
∂y ∂x
V è detto irrotazionale se rotV = 0. Dunque i campi irrotazionali sono l’analogo delle
forme chiuse e i campi conservativi sono irrotazionali: infatti l’uguaglianza delle derivate
seconde miste implica
rot∇U =
∂ ∂U
∂ 2U
∂ 2U
∂ ∂U
−
=
−
= 0.
∂y ∂x
∂x ∂y
∂yx
∂xy
4
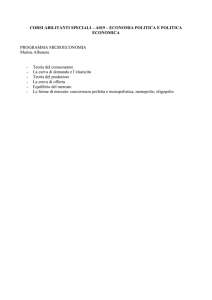
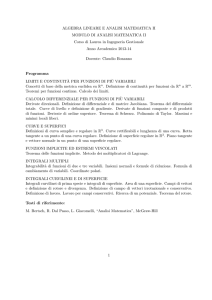
Figura 1: Campo di avvolgimento
1
(−y, x)
x2 +y 2
e campo centrale √
1
(x, y)
x2 +y 2
Schema riassuntivo
Forme differenziali e campi vettoriali
forma differenziale δL = A(x, y)dx + B(x, y)dy
∂f
∂f
dx +
dy
∂x
∂y
∂B
∂A
=
forma chiusa
∂y
∂x
campo V = (A(x, y), B(x, y))
∂f ∂f
,
)
∂x ∂y
∂A ∂B
−
=0
campo irrotazionale rotV =
∂y
∂x
gradiente ∇f = (
differenziale esatto df =
L è una funzione di stato ⇐⇒ δL = dU
V è conservativo ⇐⇒ V = ∇U
U potenziale
δL esatta =⇒ δL chiusa
V conservativo =⇒ V irrotazionale
dominio di definizione connesso e semplicemente connesso
δL esatta ⇐⇒ δL chiusa
V conservativo ⇐⇒ V irrotazionale
5
Integrali di forme differenziali e lavoro
La nozione di integrale di una forma differenziale si presenta in modo naturale in fisica con
la definizione di lavoro di una forza applicata ad un punto che subisce uno spostamento
lungo un cammino. Se un punto si muove sul piano ed il suo moto è descritto da equazioni
parametriche del tipo x = x(t), y = y(t), dove il parametro t è il tempo, la sua velocità
è ad ogni istante data da
!
dx
dt
dy
dt
v=
La potenza W di un campo di forza
F=
A(x, y)
B(x, y)
agente sul punto è ad ogni istante uguale al prodotto scalare della forza per la velocità,
dy
W = F · v = A dx
dt + B dt .
Il lavoro compiuto dalla forza in un intervallo di tempo [a, b] è l’integrale della potenza
in quell’intervallo, cioè l’integrale:
Z b
Z b
dy
w[a,b] =
F · v dt =
A(x(t), y(t)) dx
+
B(x(t),
y(t))
dt
dt dt.
a
a
Ad un campo di forze F = (A(x, y), B(x, y) si può associare la forma differenziale
δw = Adx + Bdy
(il lavoro elementare o infinitesimo)
avente le stesse componenti della forza F. Sia
x = x(t)
γ(t) :
y = y(t)
il cammino nel piano dato dalla traiettoria del moto. Allora il lavoro lungo la curva γ è
dato da
Z
Z
w[a,b] = δw = A dx + B dy.
γ
γ
dy
Infatti A(x(t), y(t)) dx
dt + B(x(t), y(t)) dt dt è quanto si ottiene sostituendo x = x(t),
y = y(t) nella forma differenziale δw = Adx + Bdy .
Un modo equivalente di vedere l’integrale di linea è quindi di considerare le forme
differenziali. Sia
δU = A(x, y)dx + B(x, y)dy
una forma differenziale. Definiamo l’integrale di linea della forma δU lungo il cammino
γ come
Z
Z a
dy
δU =
A(x(t), y(t)) dx
+
B(x(t),
y(t))
dt
dt dt.
γ
b
6
Come si vede, l’ultimo integrale è l’integrale definito di una funzione del parametro
t sopra l’intervallo chiuso [a, b] (dove s’intendono definite le equazioni parametriche).
Questa funzione integranda è ottenuta dalla forma differenziale Adx + Bdy sostituendo
alla x e alla y le equazioni parametriche.
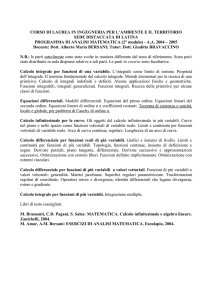
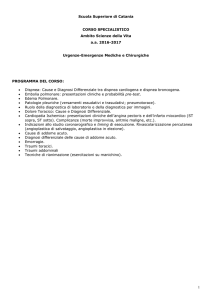
Un esempio è fornito da una trasformazione in termodinamica, ad esempio una
trasformazione adiabatica in figura
Figura 2: Tre diversi cammini: (A, B + C, D + E) per condurre un gas ideale da
P1 , V1 , T1 a P2 , V2 , T1
Si può dimostrare che cambiando la parametrizzazione della curva, cioè le equazioni
parametriche che la descrivono, il risultato non cambia. Quindi:
Z
L’integrale
δU dipende solo dalla curva come luogo di punti e, in segno, dal verso di
γ
percorrenza. Percorrendo la curva in senso opposto, l’integrale cambia di segno.
Esempio 2 Consideriamo forma differenziale ω = ydx + xydy . Sia
π
γ : [0, ] → R2 , t 7→ (cos t, sin t)
2
il quarto di circonferenza percorso in verso antiorario. Allora
R
Rπ
2
ω(ydx
+
xydy)
=
[sin t(− sin t) + cos t sin t cos t]dt =
γ
0
h 3 i π2
π
sin t cos t π2
R
cos t
1
2
=
−
dt
−
= − π4 + 13 .
2
2 0
3
0
0
Si dimostra inoltre che se la curva γ è composta dalla successione di due (o più)
curve γ1 e γ2 allora
Z
Z
Z
δU =
δU +
δU.
γ
γ1
γ2
Se una curva è chiusa (ha cioè gli stessi punti iniziali e finali) oppure è composta da
una successione di più curve che “si chiudono” si parla di integrale lungo una curva
7
chiusa o di circuitazione e si scrive
I
δU ,
γ
dove γ è una curva chiusa.
Esempio 3 Consideriamo la curva chiusa γ = γ1 + γ2 + γ3 rappresentata in figura e la
forma differenziale
δU = x2 ydx + x3 dy .
Calcoliamo
Z
I
δU =
Z
δU +
γ1
γ
Z
δU +
δU
γ2
γ3
La curva γ1 è definita da x(t) = t, y(t) = 0, 0 ≤ t ≤ 2, dunque
Z
Z 2
(t2 0dt + t3 d0) = 0 .
δU =
γ1
0
La curva γ2 è definita da x(t) = 2, y(t) = t, 0 ≤ t ≤ 2, dunque
Z
Z 2
δU =
8dt = 16 .
0
γ2
La curva γ3 è definita da x(t) = 2 − t, y(t) = 2 − t, 0 ≤ t ≤ 2, dunque
Z
Z
Allora
2
Z
3
(−(2 − t) (2 − t)dt − (2 − t) dt) = −2
δU =
γ3
2
0
0
2
(2 − t)4
(2 − t) dt = 2
4
I
δU = 0 + 16 − 8 = 8 .
γ
8
3
2
= −8 .
0
Esempio 4 Consideriamo la stessa curva chiusa γ = γ1 +γ2 +γ3 dell’esempio precedente
e la forma differenziale
δU = 2xy 3 dx + 3x2 y 2 dy .
Calcoliamo
I
Z
Z
δU =
γ
δU +
Z
δU +
γ1
γ2
δU
γ3
La curva γ1 è definita da x(t) = t, y(t) = 0, 0 ≤ t ≤ 2, dunque
Z
Z 2
(2t03 dt + 3t2 02 d0) = 0 .
δU =
0
γ1
La curva γ2 è definita da x(t) = 2, y(t) = t, 0 ≤ t ≤ 2, dunque
Z 2
Z
2
12t2 dt = 4t3 0 = 32 .
δU =
0
γ2
La curva γ3 è definita da x(t) = 2 − t, y(t) = 2 − t, 0 ≤ t ≤ 2, dunque
Z 2
Z
Z 2
2
2
2
2
(2−t)4 dt = (2 − t)5 0 = −32 .
(−2(2−t)(2−t) dt−3(2−t) (2−t) dt) = −5
δU =
γ3
0
0
Allora
I
δU = 0 + 32 − 32 = 0 .
γ
Uno dei problemi più importanti sulle forme differenziali, che è strettamente legato
alla termodinamica e alla fisica, è il seguente:
Z
Quando
δU dipende solo dal punto iniziale e da quello finale ma non dal cammino
γ
tra i due punti?
(in tal caso si dice spesso, con abuso di linguaggio, che“l’integrale è indipendente dal
cammino”.)
Questo avviene se δU ha un potenziale, cioè è esatta ovvero U è una funzione di
stato. vale infatti il seguente teorema che è un’estenzione al caso di bidimensionale del
teorema fondamentale del calcolo integrale (di Barrow), che vale però ora solo per forme
esatte:
Teorema 1 (Teorema fondamentale del calcolo integrale in due dimensioni) Se
∂U
∂U
dx +
dy in un dominio D allora
δU = dU =
∂x
∂y
Z
δU = U (γ(b)) − U (γ(a))
γ
Z
δU dipende solo dai punti iniziali e finali.
per ogni curva γ contenuta in D e dunque
γ
9
Si può provare più in generale, che la proprietà che “l’integrale di una forma δU su
D è indipendente dal cammino” può essere espressa nei seguenti modi equivalenti:
Z
Z
(i)
δU =
γ
δU per ogni coppia di cammini con gli stessi punti iniziali e finali
δ
contenuti in D .
I
δU = 0 per ogni curva chiusa contenuta in D .
(ii)
τ
(iii) U è una funzione di stato: δU = dU , cioè la forma differenziale è esatta in D
e U è un potenziale.
(iv) δU è chiusa e D è connesso e semplicemente connesso.
Nell’interpretazione fisica abbiamo che una forza è conservativa, se e solo se il lavoro
compiuto dalla forza per lo spostamento lungo una curva γ non dipende dal cammino.
Osserviamo che nell’Esempio 3, Hla forma δU non è chiusa e quindi non può essere
esatta; in effetti abbiamo visto che γ δU 6= 0. La forma δU dell’Esempio 4 è chiusa ed
è definita su tutto R2 , quindi è esatta. In effetti è facile vedere che un potenziale è dato
dalla funzione U (x, y) = x2 y 3 .
Ci poniamo però ora il seguente problema
Come si può calcolare un potenziale, se una forma è chiusa in un dominio
semplicemente connesso (cioè è esatta)?
Vedremo due metodi per fare questo.
1. metodo. L’idea è quella di integrare lungo una qualunque curva tra un punto fisso
e uno variabile. Precisamente:
Per calcolare il potenziale (ricordato che esso è definito a meno di una costante additiva)
si fissa un punto di riferimento P0 = (x0 , y0 ) ∈ D e si integra la forma differenziale lungo
una curva γ (in generale una spezzata) scelta arbitrariamente (ma convenientemente)
che unisce P0 ad un generico punto P = (x̄, ȳ) ∈ D , senza uscire da D .
Si avrà allora
Z
U (x̄, ȳ) =
δU
γ
Esempio 5 Consideriamo la forma differenziale
δU = 2xy 3 dx + 3x2 y 2 dy
dell’Esempio 4 che è definita in D = R2 (che non ha buchi) ed è chiusa:
∂(2xy 3 )
∂(3x2 y 2 )
= 6xy 2 =
.
∂y
∂x
10
R
R
Calcoliamo allora γ1 δU + γ2 δU lungo i cammini γ1 e γ2 in figura
La curva γ1 è definita da x(t) = t, y(t) = 0, 0 ≤ t ≤ x̄, dunque
Z
δU = 0 .
γ1
La curva γ2 è definita da x(t) = x̄, y(t) = t, 0 ≤ t ≤ ȳ , dunque
Z
Z ȳ
ȳ
3x̄2 t2 dt = x̄2 t3 0 = x̄2 ȳ 3 .
δU =
γ2
0
Allora
U (x̄, ȳ) = x̄2 ȳ 3 .
2. metodo. Integriamo parzialmente due volte. Vediamolo sull’esempio precedente.
Esempio 6 Consideriamo la forma differenziale
δU = 2xy 3 dx + 3x2 y 2 dy = A(x, y)dx + B(x, y)dy .
Vogliamo trovare f (x, y) tale che
∂f (x, y)
= A(x, y) = 2xy 3 ,
∂x
∂f (x, y)
= B(x, y) = 3x2 y 2 .
∂y
Integriamo parzialmente (cioè solo rispetto a x) la prima equazione. Troveremo che
f (x, y) dovrà essere uguale a una primitiva di 2xy 3 pensata solo come funzione di x (y
pensato costante) a meno di una costante rispetto a x, cioè di una funzione solo della
y:
f (x, y) = x2 y 3 + g(y) .
11
Sostituiamo questa espressione per f nella seconda equazione:
∂x2 y 3 + g(y)
∂f (x, y)
=
= 3x2 y 2 + g 0 (y) = B(x, y) = 3x2 y 2 .
∂y
∂y
Dall’equazione 3x2 y 2 + g 0 (y) = 3x2 y 2 abbiamo g 0 (y) = 0 cioè g(y) = c e quindi abbiamo
l’espressione per il generico potenziale
f (x, y) = 3x2 y 2 + c .
Notiamo possaimo procedere nell’ordine che vogliamo per le due equazioni. ad esempio avremmo potuto integrare prima rispetto a y la secoda equazione e poi sostituire
nella prima.
È inoltre un caso speciale che f (y) risulti costante. Vediamo un altro esempio.
Esempio 7 Vogliamo determinare un potenziale della forma differenziale
δU = (4x2 + 8xy)dx + (3y 2 + 4x2 )dy
che è chiusa e definita su tutto R2 .
Vogliamo quindi trovare f (x, y) tale che
(1)
∂f
= 4x2 + 8xy ,
∂x
(2)
∂f
= 3y 2 + 4x2 .
∂y
Integrando (1) rispetto a x (trattando quindi y come costante), troviamo f (x, y) =
3 3
x + 4x2 y+ una costante di integrazione (indipendente da x), quindi una funzione della
4
sola y . Cioè possiamo scrivere
4
f (x, y) = x3 + 4x2 y + g(y) .
3
Deriviamo ora parzialmente rispetto alla y trovando
∂f
= 4x2 + g 0 (y) .
∂y
Confrontando con la (2) abbiamo
4x2 + g 0 (y) = 3y 2 + 4x2
e quindi g 0 (y) = 3y 2 . Integrando abbiamo allora g(y) = y 3 + c. Sostituendo troviamo
allora
4
f (x, y) = x3 + 4x2 y + y 3 + c .
3
12
Notiamo che tutto si estende a forme diferenziali di più variabili. Ad esempio in tre
variabili la condizione di chiusura per la forma
δU = Adx + Bdy + Cdz
è
∂A
∂B
=
,
∂y
∂x
∂B
∂C
=
,
∂z
∂y
∂C
∂A
=
.
∂x
∂z
Questa condizione è più facile da ricordare se U = (A(x, y, z), B(x, y, z), C(x, y, z)) è il
campo vettoriale corrispondente a δU : infatti
i
j
k
∂ ∂ ∂ ∂B
∂C
∂A
∂B
∂A
∂C
−
i−
−
j+
−
k,
rot U = ∂x ∂y ∂z =
∂y
∂z
∂x
∂z
∂x
∂y
A B C e ricordiamo che δU è chiusa se e solo se rot U = 0.
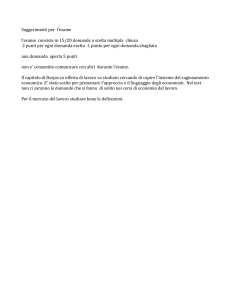
Figura 3: Campo vettoriale e cammino (da Wikipedia, dove si trova un’immagine
dinamica http://it.wikipedia.org/wiki/Immagine:Line-Integral.gif)
13
Differenziali esatti in termodinamica (cenno)
Si indicano con
P la pressione di un gas
n il numero delle moli
V il volume e V̄ il volume molare ( V̄ =
V
)
n
q il calore
w il lavoro
U l’energia.
La legge dei gas ideali si scrive
P =
nRT
RT
=
V
V̄
con R una costante (costante molare).
L’energia U = U (T, V̄ ) è una funzione di stato e il suo differenziale totale è
∂U
∂U
dT +
dV̄ .
dU =
∂T V̄
∂ V̄ T
Per la legge di conservazione dell’energia
dU = δq + δw
dove δq e δw sono le forme differenziali date da calore e lavoro elementare. Avendosi
δw = −P dV̄
si trova
δq = dU + P dV̄ =
∂U
∂T
dT +
V̄
∂U
∂ V̄
+P
dV̄ ,
T
quindi usando l’equazione dei gas ideali
∂U
RT
∂U
dT +
δq =
+
dV̄ .
∂T V̄
∂ V̄ T
V̄
Ora, la forma δq non è chiusa e quindi il calore non è una funzione di stato; infatti
∂ 2U
∂
∂U
RT
∂ 2U
R
6=
+
=
+
∂T ∂ V̄
V
∂ V̄ ∂T
V̄
∂T ∂ V̄
poiché R/V̄ 6= 0.
Se dividiamo però δq per T , troviamo la forma differenziale
δq
1 ∂U
1
∂U
RT
=
dT +
+
dV̄ .
T
T ∂T V̄
T
∂ V̄ T
V̄
14
Il secondo principio della termodinamica afferma tra le altre cose che questa forma è
esatta, quindi
1 ∂U
R
∂
1 ∂U
∂
+
=
∂T T ∂ V̄ T V̄
∂ V̄ T ∂T V̄
cioè
1 ∂2
1 ∂U
1 ∂2
=− 2
+
T ∂ V̄ ∂T
T ∂ V̄
T ∂T ∂ V̄
e quindi
∂U
=0
∂ V̄
il che significa che l’energia è funzione solo della temperatura
U = U (T )
abbiamo allora una forma differenziale esatta
U0
R
dR + dV̄
T
V̄
(U 0 derivata di U rispetto a T ), il cui potenziale si chiama entropia.
15
Esercizi
1. Studiare le forma differenziali
a) δU = 2xy dx + (x2 + 3y 2 ) dy ;
b) δU = xy dx + (x2 + 6y) dy ;
c) δU = u du + v dv ;
d) δU = y dx − x2 dy ;
e) δU = du + u dv ;
f ) δU = wdz − w2 dw
vedendo se sono esatte e trovarne eventualmente un potenziale.
2. Dato il cammino chiuso γ : x = cos t, y = sin t, 0 ≤ t ≤ 2π calcolare le circuitazioni
H
a) γ dx + y dy ;
H
b) γ 2xy dx + x2 dy ;
H
c) γ dx;
H
d) γ y dx + dy .
Perché nei casi (a), (b) e (c) si poteva dire il risultato senza bisogno di calcoli?
3. Sia γ il cammino chiuso in figura nel piano (T, V̄ ) dove T è la temperatura e V̄
il volume molare di un gas.
Calcolare la circuitazione
I q=
γ
RT
Cv dT +
dV̄
V̄
(Cv costante).
16