Relatività
Prof. Roberto Fantini
Relatività ristretta
Einstein 1905
SISTEMI DI RIFERIMENTO
Chi di noi viaggiando in treno non si è mai posto la domanda: “Siamo noi a muoverci in
avanti o è l’altro treno che si muove all’indietro?”
Se siamo su un treno in corsa, per noi la nostra valigia è ferma mentre un osservatore la
vede muoversi con la stessa velocità del treno. Ma allora la valigia è ferma o no? Chi ha
ragione?
Sistemi di riferimento inerziali
L’esempio del treno che viaggia a velocità costante su una rotaia perfettamente rettilinea, ci
permette di definire una classe particolare di sistemi di riferimento nei quali valga la
legge d’inerzia (“Un corpo non soggetto a forze si muove di moto rettilineo uniforme”).
E’ ovvio che uno stesso evento è descritto in termini diversi da diversi sistemi di riferimento
inerziali e non c’è un criterio oggettivo per stabilire in ASSOLUTO chi ha ragione: per il
viaggiatore la valigia è ferma; per il capostazione la valigia si muove ed entrambi hanno
ragione.
Quello che è interessante è cercare di conoscere la relazione che sussiste tra le due
descrizione dell’evento, ossia la legge matematica che lega i due osservatori in modo da
poter prevedere cosa vede il nostro amico sapendo quello che vediamo noi. La più
generale trasformazione di coordinate può essere scritta nella forma:
x ' f x, t
t ' g x, t
dove f e g sono funzioni di classe almeno C2.
Le trasformazioni di Galileo-Newton
Prima di Einstein, le equazioni di trasformazione fra sistemi di riferimento inerziali che
venivano utilizzate erano quelle ben note e sperimentate di Galileo – Newton:
x x ' Vt '
t t '
dove con V indichiamo la velocità (lungo la direzione positiva dell’asse x) del sistema di
riferimento accentato o’x’y’z’ rispetto a quello NON accentato oxyz. Esse ci permettono di
passare dal sistema in movimento a quello “fermo”.
Abituiamoci fin da ora a scrivere le in forma vettoriale:
x Ax '
1 V x '
( x, t )
0 1 t '
Se vogliamo la trasformazione inversa (dal sistema fermo a quello in movimento) basta
invertire la ossia calcolare la matrice inversa di A. Notiamo che essa ha determinante 1 per
cui la sua inversa è molto semplice. Si ottiene: A
1
1 V
che fornisce:
0 1
x ' x Vt
t ' t
Liceo Scientifico di Cesena
1
Relatività
Prof. Roberto Fantini
Il risultato è banale pensando che, dal punto di vista del sistema accentato o’x’y’z’, è il
sistema fisso che si sta muovendo con velocità -V.
La trasformazione di Galileo più generale è un gruppo continuo a 10 parametri del tipo:
3
'
x
i Rij x j vi t ai
i 1
t ' t a
0
i 1, 2,3
Rij è una matrice ortogonale di SO(3) e ha quindi 3x(3-1)/2 parametri liberi (i 3 angoli di
Eulero). Tale cambiamento di coordinate prende il nome di trasformazione ORTOCRONA.
COVARIANZA
In fisica riveste un ruolo importantissimo il concetto di COVARIANZA.
DEF. Se un’equazione che descrive un fenomeno fisico resta invariata nella forma dopo
una trasformazione (di coordinate), allora la legge fisica si dice COVARIANTE.
In matematica per esempio, le rette del piano sono covarianti rispetto a qualunque
isometria; infatti se applichiamo una traslazione o rotazione o riflessione ad una retta
y=mx+q otteniamo sempre una retta della forma y’=m’x’+q’.
Covarianza delle leggi della dinamica sotto le trasformazioni di Galileo
Non è difficile dimostrare come la legge fondamentale della dinamica F=ma sia covariante
per trasformazioni di Galileo (G).
1. Cominciamo a derivare 2 volte la rispetto al tempo otteniamo:
a a'
cioè l’accelerazione di un corpo è la stessa in tutti i sistemi di riferimento che
differiscono fra loro per una trasformazione di Galileo.
2. La massa inerziale m di un corpo è una proprietà intrinseca e quindi non cambia.
3. Come si trasforma la forza passando dal sistema oxyz a o’x’y’z’? Come è noto, in
fisica la forza si ottiene dall’energia potenziale mediante una derivazione rispetto alle
coordinate:
F (r ) , , ( r )
x y z
Siccome la distanza r fra 2 punti non varia perché le trasformazioni G sono
semplicemente una traslazione nello spazio, allora le energie potenziali a cui è
soggetta la particella calcolate nei 2 sistemi di riferimento sono uguali:
(r ) '( r ')
4. Ci manca da vedere come cambia l’operatore gradiente. Si ha:
3 x
t
j
x ' j 1 x ' x j x ' t x
dove x j j=1,2,3 sta ad indicare x, y e z a seconda dell’indice. Per le altre 2 derivate
parziali vale la stessa formula e quindi:
'
Mettendo tutto assieme possiamo sintetizzare i risultati ottenuti nel modo seguente:
Liceo Scientifico di Cesena
2
Relatività
a ' a
m ' m
se
F
ma
'(r ') (r )
'
Prof. Roberto Fantini
F ' m'a '
Se la legge fondamentale della dinamica vale in un sistema di riferimento inerziale allora
essa vale in tutti i sistemi di riferimento che si ottengono da questo per trasformazioni di G.
In altre parole la dinamica è covariante per trasformazioni di G.
Detto in altre parole vale un PRINCIPIO di RELATIVITA’ GALILEIANO per la dinamica:
TUTTI I SISTEMI DI RIFERIMENTO INERZIALI (LEGATI DA TRASFORMAZIONI
G) SONO EQUIVALENTI NELLA DESCRIZIONE DELLA MECCANICA DI
NEWTON
L’ELETTROMAGNETISMO è covariante sotto una trasformazione di G. ?
Per rispondere a questa domanda, consideriamo 2 sistemi di riferimento in moto relativo
rettilineo uniforme lungo l’asse x con velocità V. Supponiamo
di avere
un elettrone che si
muove con velocità v nel sistema di riferimento oxyz. Siano E e B il campo elettrico e
magnetico misurati nel sistema in quiete e E ' e B ' quelli misurati nel sistema in moto.
Supponiamo che la forza di Lorentz cui è soggetto l’e- sia covariante, cioè abbia la stessa
forma in entrambi i sistemi di riferimento:
v
F e E B
c
v'
F ' e E ' B '
c
Ora, dalle trasformazioni di G si ha: v ' v V e anche F F ' . Quindi:
v v V
E B E ' B ' B '
c
c
c
che deve essere sempre verificata per qualunque valore della velocità dell’elettrone. In
particolare possiamo prendere v=0 ed ottenere dalla :
che sostituita nella mi fornisce:
V
E E ' B '
c
B B'
Ma B = 0 perché nel sistema in quiete l’elettrone è fermo allora anche B’ = 0. Ma se B’ = 0
allora dalla anche E = E’. Riassumendo si dovrebbe avere:
e
ˆ
E
r
E
'
2
r
B B '
e ciò è assurdo perché significherebbe che una carica elettrica in moto (l’elettrone visto dal
sistema di riferimento accentato o’x’y’z’) non produrrebbe nessun campo magnetico.
Liceo Scientifico di Cesena
3
Relatività
Prof. Roberto Fantini
In conclusione possiamo affermare che:
L’elettromagnetismo NON è covariante per trasformazioni G
Che fare?
La non covarianza dell’elettromagnetismo rispetto alle trasformazioni G è un grosso
problema. Ciò significherebbe che le equazioni di Maxwell assumono la loro semplice
forma in un particolare sistema di riferimento, quello dell’ETERE che è unico a meno di
rototraslazioni. In tutti gli altri in moto rispetto all’etere, si dovrebbe tenere conto della
velocità V del sistema rispetto all’etere e le equazioni sarebbero diverse e più complicate.
Quali possibili soluzioni abbiamo al problema?
Le possibili strade sono sostanzialmente 3:
1. Il principio di relatività galileiano (le equazioni della fisica assumono la stessa forma
in qualsiasi sistema di riferimento inerziale) va limitato alla sola dinamica e non per
l’elettromagnetismo (esperimento di Michelson e Morley).
2. Il principio di relatività galileiano vale per tutta la fisica ma l’elettromagnetismo non è
spiegato correttamente dalle equazioni di Maxwell (Ritz).
3. La meccanica newtoniana ha validità limitata; l’e.m. è corretto; quello che si deve
cambiare sono le trasformazioni di Galileo e la meccanica di Newton.
1) L’esperimento di Albert Abraham Michelson
(1852-1931)-Edward
Williams Morley
(1838-
1923)
Nel 1881 i due fisici americani M. e M. provarono a determinare la velocità della Terra
rispetto all’etere attraverso un esperimento di interferometria. Il concetto era molto
semplice. La luce che si muoveva lungo il braccio che puntava nella direzione del moto
della Terra rispetto all’etere doveva viaggiare ad una velocità c-V all’andata e c+V al ritorno
determinando perciò un certo cammino ottico. Lungo la direzione ortogonale la velocità era
sempre c, ma il percorso di andata e ritorno era maggiore del doppio della lunghezza fisica
del braccio perché nel frattempo lo specchio M2 si era mosso in avanti.
Facendo i conti si trova che:
2d10
1
V2
c
1 2
c
2d
2d
1
t2 2
4d 202 V 2 t22 20 1/ 2
c
c
c
t1
d10
d
2d
10 10
c V c V
c
dove d10 e d20 sono le lunghezze dei bracci dell’interferometro misurate a riposo nel sistema
del laboratorio.
La differenza di cammino ottico fra i raggi che doveva produrre le frange di interferenza
doveva essere quindi:
c(t1 t2 ) 2 1/ 2 ( d10 d 20 )
Ruotando l’apparato sperimentale di 90° ci si aspettava di trovare un nuovo valore di '
semplicemente scambiando d10 con d20 in quanto ora è il braccio 2 che si muove nella
direzione della Terra. La variazione complessiva della figura di interferenza doveva essere
u
' V 2
2 d10 d 20
c
proporzionale a V2; ma l’esperimento dava sempre u=0 !! Ossia V=0 .
Liceo Scientifico di Cesena
4
Relatività
Prof. Roberto Fantini
2) I tentativi di riformulare una nuova teoria dell’e.m. mantenendo valida la fisica
newtoniana fallirono miseramente.
I POSTULATI DELLA RELATIVITÀ RISTRETTA
La Relatività Ristretta (RR) o speciale si basa su 2 semplici ma rivoluzionari postulati:
1. La validità universale del principio di relatività galileiano: “Le equazioni della fisica
sono covarianti rispetto a qualunque sistema di riferimento inerziale”. Cioè le
equazioni della fisica assumono la stessa forma in qualunque sistema inerziale.
2. La velocità della luce è una costante universale della fisica ed il suo valore non
cambia se misurata da differenti sistemi di riferimento inerziali.
Conseguenze
1. Il primo postulato rende del tutto inutile l’esistenza dell’etere, in quanto non esiste più
un sistema di riferimento privilegiato rispetto al quale l’e.m. ha una formulazione
semplice.
2. Viene a perdersi il concetto di simultaneità degli eventi e quindi in definitiva
dell’assolutezza del tempo. Supponiamo infatti che in un sistema di riferimento K un
segnale luminoso sferico venga emesso in un punto A posto sull’asse x. Gli
osservatori B e C equidistanti da A vedranno la luce SIMULTANEAMENTE ossia
nello stesso istante. Se ora un sistema K’ in moto rispetto a K con velocità V osserva
il fenomeno vede il punto B andare incontro al fronte d’onda e C scappare. Ma
siccome anche per K’ la luce viaggia in entrambe le direzioni sempre con c (e non
con c+V verso il punto che scappa con velocità V e con c-V rispetto al punto che
viene incontro) esso constata che l’arrivo del raggio luminoso in B’ e C’ non è più
simultaneo.
Eventi, intervalli e distanza nello spazio-tempo di Minkowski
Definiamo evento spazio-temporale una qualsiasi quaterna di numeri (t, x, y, z).
Supponiamo ora che nel sistema K un raggio di luce venga emesso dal punto E 1(t1, x1, y1,
z1) e venga assorbito nel punto E2(t2, x2, y2, z2). Ovviamente sarà:
c t2 t1
x2 x1
2
y2 y1 z2 z1
2
2
Nel sistema in moto K’ gli eventi E 1 ed E2 saranno visti nei punti E’1(t’1, x’1, y’1, z’1) e E’2(t’2,
x’2, y’2, z’2). Per la costanza della velocità della luce anche nel sistema accentato si avrà:
c t '2 t '1
x '2 x '1
2
y '2 y '1 z '2 z '1
2
2
Se chiamiamo INTERVALLO la quantità:
2
s1,2
= c 2 ( t2 - t1 ) - ( x2 - x1 ) - ( y2 - y1 ) - ( z 2 - z1 )
2
2
2
2
si conclude che se un intervallo è nullo in un sistema di riferimento K allora è nullo in un
qualunque altro sistema di riferimento K’.
Per eventi molto (infinitamente) vicini l’intervallo si scrive:
ds 2 c 2 dt 2 dx 2 dy 2 dz 2
L’intervallo introduce una DISTANZA nello SPAZIO-TEMPO di Minkowski ed è per
definizione la distanza fra 2 eventi. Essa assomiglia ad una metrica euclidea (
Liceo Scientifico di Cesena
5
Relatività
Prof. Roberto Fantini
ds dx dy dz ) ma non lo è perché compaiono mischiati segni + e segni -.
Addirittura ds 2 non ha nemmeno una segnatura semi-definita positiva come dovrebbe
2
2
2
2
essere per tutte le distanze in senso matematico.
Intervalli di tipo tempo, spazio e luce
Possiamo classificare gli intervalli in base ai loro segni algebrici come riportato nella tabella
sottostante:
Segno di s2
TIPO intervallo
Descrizione
>0
TEMPO (TIME-LIKE)
Tutti gli eventi fisici riguardanti
particelle materiali
=0
LUCE (LIGHT-LIKE)
Propagazione della luce
<0
SPAZIO (SPACE-LIKE)
Eventi non fisici, impossibili nel
nostro universo
Questa suddivisione non dipende dal sistema di riferimento in quanto s2 è un invariante!
Inoltre la conoscenza del segno dell’intervallo fra 2 eventi ci permette di stabilire se essi
possono essere legati da un rapporto causale di CAUSA-EFFETTO.
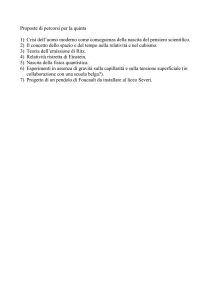
Per esempio in un diagramma x-ct tracciamo le rette x = ± ct che ovviamente sono le
bisettrici dei quadranti. Siccome ogni segnale fisico si muove con velocità v<c due eventi
sono potenzialmente connessi causalmente se essi giacciono entro il CONO di LUCE che
ha per bordo proprio le rette x = ± ct. Dentro questo cono colorato di verde gli intervalli s 2
fra O ed O’ oppure O’’ sono di tipo tempo!
Passato e Futuro ASSOLUTO
Dimostriamo che se in un sistema di riferimento due eventi che avvengono dentro il cono di
luce nei punti E1(t1, x1, y1, z1) ed E2(t2, x2, y2, z2), allora esiste un altro sistema di riferimento
Liceo Scientifico di Cesena
6
Relatività
Prof. Roberto Fantini
K’ nel quale i due eventi avvengono nello stesso luogo, ma MAI nello stesso tempo, cioè in
simultanea. Si ha infatti:
2
2
2
2
s1,2
c 2t122 l122 c 2t '12
l '12
s '1,2
||
0
in K'
2
c 2t '12
c 2t122 l122
s212 è TIME Like e lo è anche s’212 per cui è possibile trovare un tale K’.
Mentre se vogliamo che i due eventi E 1 ed E2 accadano in K’ in luoghi separati ma
simultaneamente allora si dovrebbe avere:
2
2
2
2
s1,2
c 2t122 l122 c 2t '12
l '12
s '1,2
||
0
in K '
2
l '12
c 2t122 l122
s212 è TIME like mentre s’212 sarebbe SPACE Like . Ma ciò è impossibile perchè ogni
fenomeno fisico è descritto da un intervallo di tipo tempo e gli intervalli sono invarianti
relativistici.
Dentro il cono di luce, 2 eventi che sono temporalmente e spazialmente separati,
rimangono sempre temporalmente separati in qualunque sistema K’ ma possono essere
visti spazialmente coincidenti.
In conclusione possiamo dire che se un evento E 2 sta nel futuro (o passato) di E 1 in un
certo sistema di riferimento K allora anche E’ 2 sta nel futuro (o passato) di E’ 1 in qualsiasi
altro sistema di riferimento K’. È per questo che si parla di futuro o passato ASSOLUTO di
un evento.
Viceversa se 2 eventi (O e O’’’) avvengono fuori dal cono di luce allora il loro intervallo è di
tipo SPAZIO (<0), rimangono sempre spazialmente separati in qualunque sistema K’ ma
possono essere visti in simultanea.
In definitiva il cronotopo è suddiviso in 3 regioni che si chiamano: i) del FUTURO
ASSOLUTO, ii) del PASSATO ASSOLUTO; iii) dell’ALLONTANAMENTO ASSOLUTO. Per
esempio nella figura sottostante O’ è nel FUTURO ASSOLUTO di O mentre O’’ è nel suo
PASSATO ASSOLUTO.
In tre dimensioni (2 spaziali, x e y, ed 1 temporale) il cono apparirebbe come riportato nella
figura sottostante. La traiettoria di un raggio di luce è x 2 +y2 = c2 t2 .
Liceo Scientifico di Cesena
7
Relatività
Prof. Roberto Fantini
CONO di LUCE: il moto fisico avviene dentro il cono di luce.
TEMPO
Tempo proprio
Si definisce tempo proprio di un corpo, quello segnato da un orologio SOLIDALE con il
corpo stesso. Se l’orologio è solidale con il corpo allora esso è visto fermo e si misura un
intervallo ds 2 c 2 dt ' 2 da cui si ottiene per il tempo proprio:
t2' t1'
1
ds
c traiettoria
Ma per un orologio in quiete, la traiettoria nello spazio-tempo non è altro che una linea
verticale, per cui il tempo proprio è, fra tutte le possibili traiettorie in K il maggiore di tutti i
tempi possibili, proprio perché ds è un segmento verticale c∆t’ al quale non viene tolto
alcunchè. Tutte le altre traiettorie che collegano i due eventi (che hanno le stesse
coordinate spaziali ma diversi tempi) nel sistema K hanno un ds’ minore di quello rettilineoverticale. Nello spazio-tempo, le rette descrivono moti inerziali, tutte le altre curve, no. Le
rette sono percorsi privilegiati nel senso che lungo di esse
1
. ds è max. Da questo si
c traiet
deduce che il tempo misurato da un orologio in quiete scorre più rapidamente di quello
misurato da un orologio in movimento.
Il tempo è relativo
Liceo Scientifico di Cesena
8
Relatività
Prof. Roberto Fantini
Vediamo qual è la relazione fra gli intervalli di tempo di due eventi che avvengono nella
stessa posizione in K’ in quiete rispetto agli eventi stessi e se invece misurati dal sistema di
riferimento K in moto relativo. Sfruttiamo l’invarianza della dell’intervallo ds 2 (ossia della
velocità della luce).
ds '2 c 2 dt '2 c 2 dt 2 dx 2 dy 2 dz 2 ds 2
da questa ci ricaviamo la durata temporale dt’ in funzione di dt:
dt ' dt 1
Dato che V<c ,
1
1
2
V
c2
1
dx 2 dy 2 dz 2
V2
dt
dt
1
2
2
2
c dt
c
e quindi il tempo misurato da un orologio in quiete (tempo
proprio) scorre più rapidamente di quello misurato da un qualunque altro orologio in moto
relativo rispetto a K’. Se per esempio una particella decade “a riposo” in 1022 s, nel sistema
di riferimento del laboratorio quando essa è vista muoversi molto rapidamente può
impiegare 1000 o 10000 volte più tempo prima di decadere.
Per ottenere la durata finita degli eventi si dovrà calcolare l’integrale:
t2
V2
t t dt 1 2
c
t1
'
2
'
1
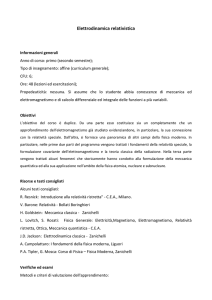
Il fattore Gamma di Lorentz
Nel prosieguo si farà spesso riferimento al parametro di velocità
V
e al fattore di
c
1
V 2 . è sempre 0=< < 1 mentre, come già detto, >=1. Nel grafico
1 2
c
sottostante viene riportato in funzione della velocità V del sistema di riferimento K’ .
Lorentz
Liceo Scientifico di Cesena
9
Relatività
Prof. Roberto Fantini
Trasformazioni di Lorentz
Sappiamo bene che nello spazio euclideo ¡ 3 esiste un gruppo di trasformazioni che
2
2
2
2
lasciano invariata la distanza euclidea dsE dx dy dz , le ISOMETRIE che, a parte
le simmetrie assiali, altro non sono che roto-traslazioni.
Ci chiediamo ora: quali sono nello spazio di Minkowski le trasformazioni che lasciano
2
2
2
2
2
2
invariata la “distanza” ds c dt dx dy dz ?
Per semplicità limitiamoci alle sole due variabili x e t e consideriamo le seguenti:
x ' x cosh ct sinh
ct ' x sinh ct cosh
e e
e e
dove: cosh
e sinh
. Ricordiamoci che per le funzioni
2
2
iperboliche si ha la proprietà notevole: cosh 2 sinh 2 1 . Verifichiamo ora che la
distanza fra due eventi nello spazio di Minkowski non varia. Cioè ct '2 x '2 ct 2 x 2 .
2
2
c 2 t '2 x '2 x sinh ct cosh x cosh ct sinh
c 2t 2 (cosh 2 sinh 2 ) x 2 (cosh 2 sinh 2 ) c 2t 2 x 2
Quindi nello spazio-tempo di Minkowski le rotazioni iperboliche sono “isometrie” che
lasciano invariati gli intervalli.
Le trasformazioni valgono per tutti i punti del sistema K ed in particolare per l’origine, ossia
x=0. x’ è allora la coordinata di O vista da O’. Si ottiene:
x ' 0 ct sinh
ct ' 0 ct cosh
__________________________
V
tanh
c
Dove l’ultimo passaggio è stato ottenuto dividendo membro a membro.
Sostituendo nelle : V/c = tanh e ricordandosi che dalle formule che legano le funzioni
iperboliche si ha:
sinh
tanh
1 tanh 2
;
cosh
1
1 tanh 2
finalmente otteniamo le TRASFORMAZIONI di LORENTZ dirette:
x ' x Vt
TLorentz
V
t ' t c 2 x
e inverse (vedi paragrafo seguente):
x x ' Vt '
T Lorentz
V
t t ' c 2 x '
1
Liceo Scientifico di Cesena
10
Relatività
Prof. Roberto Fantini
Notiamo che se consideriamo c->∞ (V/c = 0 e γ=1) allora le si riducono alle trasformazioni
di Galileo ; questo comportamento delle trasformazioni di Lorentz è chiamato limite delle
basse velocità.
Forma matriciale delle trasformazioni di Lorentz
Riscriviamo le e in una forma più conveniente:
ct ' ct x
x ' ct x
dove abbiamo messo in evidenza la variabile ct che dimensionalmente è uno spazio così
come lo è x, per cui abbiamo a sinistra due variabili omogenee. Se scriviamo le in forma
matriciale otteniamo:
ct '
x '
ct
x
La matrice:
1
1
del cambiamento di sistema di riferimento è simmetrica ( T ) ed il suo determinante è:
| |
2 2 2 2 1 2 1
La matrice 1 inversa di che permette di passare dal sistema accentato K a K’, si
ottiene facilmente dalla e :
1
1
1
per cui si ha:
ct ct ' x '
x ct ' x '
o anche:
x x ' Vt '
V
t t ' c 2 x '
Contrazione delle lunghezze di Lorentz-Fitzgerald e dilatazione dei tempi
Supponiamo di avere un’asta in quiete nel sistema K e che misuri L 0. Quale è la lunghezza
L dell’asta misurata da un osservatore K’ in moto con velocità V rispetto a K ?
Liceo Scientifico di Cesena
11
Relatività
Prof. Roberto Fantini
Per rispondere a questa domanda, ci dobbiamo chiedere cosa significa “lunghezza
dell’asta”. Noi la definiremo (e mi sembra che su questa definizione non ci possano essere
discussioni) come la distanza fra i suoi estremi misurata allo STESSO ISTANTE! Per cui
se nel sistema K gli estremi occupano le posizioni x 1 e x2, dovremo calcolare le nuove
posizioni x’1 e x’2 viste dal sistema K’ nello stesso istante t’ (suo locale). Utilizzando le
equazioni :
x1 x1 ' Vt '
x2 x2 ' Vt '
==> L0 x2 x1 x2 ' x1 ' L
L
L0
Questa legge va sotto il nome di: CONTRAZIONE DELLE LUNGHEZZE (di LorentzFitzdgerald) perché L<L0. Per quanto riguarda il volume di una scatola, il fattore di
contrazione è sempre γ in quanto le altre due dimensioni (y e z) non si contraggono.
L’altra conseguenza antiintuitiva delle trasformazioni di Lorentz è la dilatazione dei tempi.
Consideriamo ora due eventi che avvengono nello STESSO PUNTO x’ del sistema K’ e agli
istanti t’1 e t’2 : quanto dura l’intervallo temporale se misurato da K?
V
t1 t1 ' 2 x '
c
==>
V
t2 t2 ' 2 x '
c
t t2 t1 t2 ' t1 ' t '
t t '
Questa legge va sotto il nome di: DILATAZIONE DEI TEMPI perché t t ' , ossia la
durata di un evento misurata da un sistema di riferimento in movimento relativo rispetto al
fenomeno è sempre maggiore della durata dell’ evento misurata a riposo con esso.
Esempio.
I muoni sono le particelle sorelle maggiori degli elettroni con una vita media t0 =2.2 10-6s.
Essi sono prodotti dagli urti dei raggi cosmici primari con gli atomi di ossigeno e azoto
dell’alta atmosfera e raggiungono la superficie terrestre in grande quantità. Supponendo
che lo strato di atmosfera si L0=100 Km, quale deve essere la velocità minima del muone?
Risolviamo il problema nel sistema di riferimento della 1) Terra e del 2) muone.
1) Dalla Terra, la vita media del mu è dilatata di un fattore
L0
t
V
t0
1
:
V 2 . Sostituendo i dati e risolvendo rispetto a ottiene per il
c2
parametro di velocità V/c= 0.999982, per cui la vita media del muone misurata
da uno scienziato sulla Terra è circa 167 volte maggiore ossia di 367 10 -6s.
2) Nel sistema del mu, è lo spessore dell’atmosfera che si è assotigliato di un
fattore
:
L V t0 L0 1
V2
. L’equazione trovata è identica alla
c2
precedente per cui il risultato sarà il medesimo. Questa volta è il muone che
vede l’atmosfera 167 volte più sottile di quello che è, ossia solo circa 600 m!
Liceo Scientifico di Cesena
12
Relatività
Prof. Roberto Fantini
Trasformazione delle velocità
Si prendano in considerazione 2 sistemi di riferimento K e K’ in moto relativo con velocità V
lungo l’asse x e supponiamo che nel sistema K ci sia un oggetto che si muova di velocità
v vx , v y , vz : qual è la sua velocità v ' v 'x , v ' y , v 'z nel sistema K’ ?
dr
Usiamo la definizione cinematica di velocità: v
e differenziamo le :
dt
dx dx ' Vdt '
dt dt ' V dx '
c2
dy dy '
dz dz '
Per le 3 componenti della velocità si avrà:
v 'x V
dx
v x
dt 1 V v '
x
c2
V2
v 'y 1 2
dy
c
v y
V
dt
1 2 v 'x
c
V2
v 'z 1 2
dz
c
vz dt
V
1 2 v 'x
c
Come si può notare, le velocità si trasformano in modo completamente diverso dalle
coordinate. Questa è un’avvisaglia del fatto che mentre spazio e tempo formeranno il
quadrivettore x ct , x, y , z , le velocità non saranno componenti di alcun quadrivettore.
Le inverse delle precedenti sono:
vx '
vx V
;
V
1 2 vx
c
V2
2
c
vy '
;
V
1 2 vx
c
vy 1
Liceo Scientifico di Cesena
vz '
vz 1
1
V2
c2
V
vx
c2
13
Relatività
Prof. Roberto Fantini
Composizione relativistica delle velocità
Analizziamo qualche caso semplice.
1) Supponiamo v vx ,0,0 . Allora si ottiene:
vx V
v
'
x
V
1 2 vx
c
v ' y v 'z 0
Se vx = c => anche v’x = c, indipendentemente dal fatto che K’ si muova con velocità V
rispetto a K circostanza per cui, secondo l’intuizione galileiana, K’ dovrebbe vedere il raggio
di luce viaggiare a c-V.
2) Supponiamo che la particella si muova nel sistema K nel piano x-y e che quindi la sua
velocità sia v v cos , v sin ,0 , dove è l’angolo formato dal vettore velocità con
l’asse delle x. Nel sistema K’ la velocità sarà v ' v 'cos ', v 'sin ',0 : che relazione c’è
fra gli angoli e ' ? Per rispondere a tale domanda utilizziamo le :
v 'cos ' V
v
v
cos
x
V
1 2 v 'cos '
c
V2
v
'sin
'
1
c2
v y v sin
V
1 2 v 'cos '
c
Dividendo membro a membro si ha:
tan
Nel sistema K’ l’angolo
V2
c2
v 'cos ' V
v 'sin ' 1
' è maggiore di .
E’ interessante vedere l’angolo che forma un raggio di luce nel sistema K’ se viene
emesso ad un angolo nel sistema K. In questo caso v=v’=c:
tan luce
V2
sin ' 1 2
c
V
cos '
c
Se per esempio il raggio di luce venisse emesso nel sistema a riposo a 45° (tan =1) allora
in K’ verrebbe visto con un angolo ' = 49.2°.
Aberrazione relativistica della luce
Storicamente ha avuto una certa importanza il fenomeno dell’aberrazione della luce stellare
scoperta da James Bradley nel 1725. Egli iniziò una interessante serie di osservazioni
Liceo Scientifico di Cesena
14
Relatività
Prof. Roberto Fantini
molto precise, relative ad una apparente variazione stagionale nella posizione delle stelle,
in particolare di Gamma Draconis. Egli osservò che una stella perfettamente allo zenit
(ossia sulla verticale del luogo), sembrava muoversi lungo un’orbita quasi circolare del
raggio angolare di circa 20,3’’, con un periodo di un anno. Il fenomeno osservato da
Bradley non ha niente a che fare con il moto vero della stella, ma è una conseguenza della
velocità finita della luce e del moto della terra attorno al sole. Questo fu il 1° esperimento
diretto che fece pensare al Sole come ad un riferimento inerziale migliore di quello della
terrestre.
La più semplice spiegazione dell’aberrazione si ottiene ricorrendo all’analogia fra la
propagazione della luce e la caduta della pioggia. Se non c’è vento, la pioggia (luce) cade
verticalmente ed un uomo fermo (la Terra) che si copre la testa con l’ombrello, non si
bagna (non c’è aberrazione); se l’uomo comincia a correre, mantenendo l’ombrello sempre
nella stessa direzione verticale si bagnerà sul davanti: rispetto alla persona in moto, la
pioggia cade in obliquo. Per una stella allo zenit l’aberrazione massima è quando la velocità
della Terra è esattamente perpendicolare alla line di osservazione; allora l’angolo di
aberrazione
è dato da:
tan
VT
c
Sostituendo i valori per la Terra si ottiene:
; tan
VT
30
104 rad ; 20.6''
c 300000
Molto prossimo al valore di 20,3’’ osservato da Bradley
E’ chiaro che dal punto di vista relativistico quanto detto sopra è scorretto perché dal
sistema della Terra, la velocità della luce sarebbe maggiore di c (c’ 2 = c2 + v2) e ciò è contro
il secondo postulati di Einstein.
Trattiamo lo stesso esempio dal punto di vista relativistico; troveremo che in questo caso le
formule relativistiche introdurranno delle modifiche impercettibili a questa analisi “classica”
nel caso di velocità V<<c come per la Terra.
Consideriamo una stella ferma nel sistema di riferimento K che emetta luce lungo l’asse
verticale y e l’osservatore posto sulla Terra nel sistema di riferimento K’ in moto con
velocità V lungo x. Chiamiamo con l’angolo rispetto all’orizzontale con cui la stella emette
la luce e con ' l’angolo (sempre rispetto all’orizzontale) con cui la riceve un osservatore
posto sulla terra. '
Per determinare
è l’angolo dell’aberrazione stellare.
2
' utilizziamo le inverse delle :
v cos V
v ' x
V
1 2 v cos
c
V2
v sin 1 2
c
v ' y
V
1 2 v cos
c
Liceo Scientifico di Cesena
15
Relatività
Prof. Roberto Fantini
quindi:
2
v 'x V
V2
v
'
c
1
y
c2
Ora per un raggio di luce si ha (v=v’=c) e
In questo caso nel sistema K’ la luce ha ancora velocità c: c’ 2 = V2+c2(1-V2/c2)=c2.
Per l’aberrazione si ha dunque:
v'
tan x
v 'y
V
c
1
V2
c2
V3 V
V
O 3 ;
c
c c
che differisce dal risultato di Bradley per termini del 3° ordine in V/c.
Liceo Scientifico di Cesena
16
Relatività
Prof. Roberto Fantini
La conservazione della quantità di moto.
Le leggi più importanti della fisica sono rappresentate dalle leggi di conservazione. Una di
queste sicuramente è la conservazione della quantità di moto totale di un sistema isolato.
Per il principio di relatività di Einstein-Galileo vogliamo che la legge fisica che esprime la
conservazione della quantità di moto sia covariante per trasformazioni di Lorentz.
Vediamo innanzitutto cosa succedeva
nell’ambito della meccanica galileiana.
p
Scriviamo la conservazione di
in K e nel sistema K’ sapendo che la legge di
trasformazione delle velocità secondo le trasformazioni
di Galileo era semplicemente:
v ' v V
n
n
mi vi m f v f
K i 1
f 1
n
n
K'
mi vi ' m f v f '
i 1
f 1
Sostituendo la nella seconda delle si ottiene dopo semplici calcoli:
n
n
i 1
f 1
mi m f
Per Galileo, la covarianza della conservazione della quantità di moto portava alla
necessità della conservazione delle masse.
Ma adesso sappiamo che le trasformazioni di G. e quindi le non sono corrette perché non
compatibili con la costanza della velocità della luce in tutti i sistemi di riferimento.
Rifacciamo allora tutti i calcoli usando le trasformazioni delle velocità di Einstein . In questo
caso si ottiene:
n
v fx V
n
vix V
m
mf
i
V
V
i 1 1 2 vix f 1 1 2 v fx
c
c
K '
V2
V2
v
1
v
1
n
n
iz
fz
c2 m
c2
mi
f
V
V
i 1
f 1
1
v
1
v fx
ix
2
c
c2
e sapendo che in K abbiamo la semplice conservazione della quantità di moto espressa da:
n
n
mi vix m f v fx
f 1
i 1
n
n
m v m v
i iz
f fz
i 1
f 1
non c’è nessuna possibilità di far valere le a partire dalle precedenti, vista l’arbitrarietà e
l’indipendenza delle componenti vix e viz della velocità iniziale.
Liceo Scientifico di Cesena
17
Relatività
Prof. Roberto Fantini
Visto che continuiamo a credere nel principio di relatività e nella costanza della velocità
della luce, dovremo modificare la meccanica classica per renderla compatibile con tali
assunti.
Per prima cosa scriviamo la quantità di moto p di una particella come:
p m(v )v
e cerchiamo la m(v) giusta affinché la conservazione di p sia covariante.
Nelle bisogna mettere al posto di mi e mf mi(vi’) e mf(vf’).
Poniamo:
V
mi vi ' K (V )mi vi 1 2 vix
c
allora sostituendo questa nelle si ottiene:
n
n
m (v ) m
i
i 1
i
f 1
f
(v f )
che è l’analogo della conservazione delle masse trovate prima.
La deve valere per ogni scelta di v e vi’. In particolare deve sussistere per:
1) v 0 v ' V : m V K (V ) m 0
2) v ' 0
v V :
V2
m 0 K (V )m V 1 2
c
Confrontando la 1) con la 2) si ottiene:
K (V )
1
V2
1 2
c
Quindi riepilogando. Dalla 1) si ha:
m v
m0
v2
1 2
c
dove m0 è la massa della particella misurata a “riposo” ossia da un sistema di riferimento in
quiete rispetto ad essa. La ci dice che la massa di una particella aumenta con la sua
velocità. Ma siccome associata alla velocità di un oggetto c’è la sua energia cinetica allora
possiamo concludere che all’energia è associata una massa: l’energia possiede INERZIA.
Se sostituiamo la nella nuova definizione di p
essa fa rimanere covariante la
conservazione della quantità di moto totale di un sistema isolato sotto trasformazioni di
Lorentz:
m0 v
p
v2
1 2
c
n
La quantità che si conserva in un urto, non è la massa totale ma:
m (v ) come riportato
i 1
i
i
nella .
Se per una particella definiamo ora:
Liceo Scientifico di Cesena
18
Relatività
Prof. Roberto Fantini
m
m0
v2
1 2
c
E
c2
la ci dice che in un qualunque processo isolato si conserva la somma:
n
Ei
2
i 1 c
i 1
n
m0i
1
vi 2
c2
che rappresenta in pratica l’energia totale del sistema, dove questa volta però accanto alla
tradizionale energia cinetica viene a sommarsi un altro termine associato alla massa a
riposo . Infatti sviluppando in serie la si ha:
Quindi anche una particella ferma possiede un’enorme energia concentrata nella sua
massa secondo la formula:
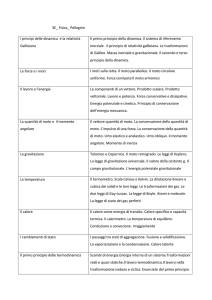
Nel grafico sottostante è riportata la velocità della particella in unità c in funzione della sua
energia totale in unità di energia di massa m 0c2. Come si può notare la velocità tende
asintoticamente a quella della luce all’aumentare di E.
Come si vede anche se l’energia aumenta a dismisura, la sua velocità al massimo si
avvicina asintoticamente a quella della luce senza mai raggiungerla. Questo succede
appunto perché all’aumentare della velocità v della particella, aumenta anche la sua massa
e quindi è sempre più difficile accelerarla: tutta l’energia viene praticamente assorbita
dall’aumento della massa e non dall’aumento della velocità.
Moltiplicando la per c2 otteniamo la famosissima formula:
E = mc2
Essa afferma che l’energia TOTALE di una particella è sempre E=mc 2. In particolare una
parte di questa energia sarà dovuta alla sua velocità (energia cinetica) ed una parte alla
sua massa (detta energia a riposo).
che è proprio identica alla trasformazione della componente x del quadri-vettore posizione
se considero come sopra E/c la componente 0, ossia temporale dello stesso. Per le
componenti py e pz si ha:
come le componenti y e z di xa.
Conservazione dell’energia totale
Il vettore pa è un quadrivettore controvariante nel senso che passando da un sistema di
riferimento K ad uno in moto relativo rettilineo uniforme K’, esso si trasforma come le
coordinate xa, ossia attraverso la matrice. Sappiamo però che le trasformazioni di Lorentz
lasciano invariata qualsiasi norma di un quadrivettore e quindi anche di p a.
Possiamo allora calcolarlo in un qualunque sistema di riferimento, per esempio in quello a
riposo con la particella stessa in cui ovviamente v=0 . In questo caso l’energia totale E è
solo quella dovuta alla massa a riposo: E = m0c2
Liceo Scientifico di Cesena
19