Capitolo IV
LA RIVELAZIONE
IN PRESENZA DI RUMORE
In questo Capitolo è affrontato il problema della rivelazione in presenza di rumore pervenendo
alla definizione della struttura del ricevitore ottimo e cioè di un ricevitore che fornisce una stima
del segnale trasmesso che dia luogo alla minima probabilità di errore per simbolo. Sono inoltre analizzate le strutture dei ricevitori ottimi per modulazioni binarie calcolando l’espressione della
probabilità di errore in dipendenza della distanza euclidea fra le segnalazioni. Tale analisi è estesa
infine a modulazioni M-arie per le quali è presentato un andamento della probabilità di errore per
simbolo in dipendenza del rapporto “segnale/rumore”. Sono infine dedotti i limiti entro cui è contenuta la probabilità di errore per simbolo per una generica segnalazione.
IV.1 - Il problema della decisione.
Il segnale r (t ) che si presenta all’ingresso del ricevitore è costituito da una replica del
segnale numerico v(t) eventualmente distorta per effetto del canale di trasmissione e corrotta da disturbi e interferenze. Supponendo che il canale di trasmissione sia ideale e a
banda sufficientemente larga da potersi trascurare le distorsioni e l’interferenza di intersimbolo, il segnale ricevuto può essere posto nella forma:
r (t ) = v(t ) + n(t )
(IV.1.1)
dove la sola causa di disturbo che viene presa in considerazione è costituita da un rumore additivo che, nel seguito, si suppone stazionario, gaussiano e bianco ed indipendente
dalla sequenza dei simboli emessi dalla sorgente di informazione.
Nei sistemi di modulazione M -ari, l’informazione trasmessa è associata ad un insieme
di M simboli a j , appartenenti ad un alfabeto di M elementi. Poiché per modulazioni prive di memoria, il segnale modulato, nel generico intervallo di segnalazione di durata T ,
dipende solo dal corrispondente simbolo a j trasmesso, risulta:
v(t ) = s j (t )
(IV.1.2)
nT ≤ t < ( n + 1)T
dove s j (t) denota la forma di segnalazione associata al simbolo a j , scelto fra un insieme
di M segnali distinti {s j (t )}
M −1
j =0
.
Per modulazioni prive di memoria, la rivelazione può essere effettuata simbolo per
simbolo, cosicché si può far riferimento all’intervallo [0, T ) corrispondente alla rivelazione
del simbolo di posto 0 nella sequenza trasmessa.
r(t)
Demodulatore
{ }
N
ρi i =1
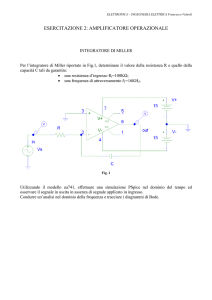
Da un punto di vista concet-
Rivelatore
Fig. 1 – Schema di principio di un ricevitore.
aˆj
tuale
è
ricevitore
utile
come
considerare
composto
il
da
due elementi in cascata (v. Fig.
1):
• il demodulatore che fornisce in uscita un insieme numerabile di variabili aleatorie
{ρk }kN=1
a partire dalla conoscenza del segnale r (t ) con t ∈ [ 0, T ) ;
• il rivelatore che dà una stima del dato trasmesso sulla base delle osservazioni {ρi }i=1 .
N
- 46 -
G. Mamola: Lezioni di Comunicazioni Elettriche
Com’è noto, nel caso di modulazioni M -arie i segnali s j (t) sono ad energia specifica finita e appartengono ad un sottospazio lineare S N ad N dimensioni, con N ≤ M , generato
da un insieme di N funzioni di base ui (t ) , definite in [0, T ) , che si suppongono ortonormali. Ciò significa che il generico segnale s j (t) nell’intervallo [0, T ) può essere sviluppato
nella forma:
(IV.1.3)
N
s j (t ) = ∑ s ji ui (t )
( j = 1, 2, … , M )
i =1
in cui i coefficienti dello sviluppo sono definiti dalle:
(IV.1.4)
⎛ i =1,2,…, N ⎞
⎜
⎟
⎜ j =1,2,…, M ⎟
⎝
⎠
T
s ji = ∫ s j (t )ui (t )dt
0
Si noti che, in generale, il vettore rappresentativo del segnale r (t ) non appartiene al
sottospazio lineare S N generato dai vettori ui . Si consideri pertanto la sua proiezione ortogonale r N che individua il segnale:
N
rN (t ) = ∑ ρi ui (t )
(IV.1.5)
i =1
essendo:
(IV.1.6)
T
ρi = ∫ r (t )ui (t )dt = s ji + ν i
( i = 1, 2 … , N )
0
con
(IV.1.7)
ν i = ∫ n(t )ui (t )dt
T
( i = 1, 2 … , N )
0
In termini delle componenti sopra definite, proiettando la (IV.1.1) ortogonalmente su
S N si ottiene:
(IV.1.8)
ρi = s ji + ν i
( i , j = 1, 2, … , N )
supposto che il simbolo trasmesso sia a j . Introducendo la notazione vettoriale, la (IV.1.8)
si può scrivere nella forma:
(IV.1.9)
rN = s j + nN
Sulla base della (IV.1.9) il problema della rivelazione può essere così formulato: partendo dalle osservazioni delle N variabili aleatorie ρ i il ricevitore deve decidere sul simbolo a j inviato. In altri termini sulla base della conoscenza dei valori ρ i il ricevitore deve
scegliere fra le seguenti M ipotesi H j :
(IV.1.10)
H j : rN = s j + nN
( j = 1, 2, … , M )
corrispondenti ai simboli a j trasmessi.
Dalla (IV.1.10) si deduce che ai fini della rivelazione del simbolo a j interviene solo la
componente del rumore appartenente al sottospazio S N . Poiché la componente del rumore n N giacente su S N e quella n N′ ad esso ortogonale corrispondono ad una coppia di segnali che, in quanto gaussiani e ortogonali, sono statisticamente indipendenti, la conoscenza di n N′ non apporta alcun contributo alla rivelazione del dato a j .
Nella trasmissione numerica il ricevitore decide a favore di quella segnalazione che
conduce ad una decisione con il minimo della probabilità di errore. È facile rendersi conto che tale criterio equivale alla stima:
(IV.1.11)
aˆ j = arg max {Pr {ai | r (t )}}
ai
Cap. IV - La rivelazione in presenza di rumore
- 47 -
Che questo criterio (noto come criterio della massima probabilità a posteriori MAP)
corrisponda alla scelta del simbolo che conduce al minimo della probabilità di errore,
noto r (t ) , è facile verificare. Infatti Pr {ai | r (t )} è la probabilità che il dato trasmesso, noto
r (t ) , sia ai ; quindi 1 − Pr {ai | r (t )} denota la probabilità che non si sia trasmesso ai noto
r (t ) . Se il ricevitore stabilisce che il dato trasmesso è ai commette un errore con proba-
bilità 1 − Pr {ai | r (t )} . La condizione (IV.1.11) corrisponde quindi alla scelta del simbolo in
corrispondenza del quale la probabilità di errore è minima, o che è lo stesso, la probabilità della corretta decisione è massima. Poiché la componente rN′ (t ) del segnale ricevuto
ortogonale al sottospazio S N non porta alcun contributo alla decisione, quest’ultima può
essere presa sulla base del vettore delle variabili di decisione rN = [ρ1 ρ2 … ρ N ] . La
T
funzione Pr {ai | r (t )} è equivalente alla Pr {ai | rN } . Applicando la regola di Bayes, si può
scrivere:
Pr {ai | rN } =
(IV.1.12)
prN |ai ( rN | ai ) Pr {ai }
prN (rN )
in cui:
• Pr {ai } è la probabilità associata al simbolo ai ;
•
prN (rN ) è la densità di probabilità associata al vettore rN ;
•
prN |ai ( rN | ai ) è la densità di probabilità associata al vettore rN noto che il simbolo tra-
smesso è ai .
Se i simboli sono equiprobabili, la (IV.1.11) si riduce alla:
(IV.1.13)
aˆ j = arg max prN |ai (rN | ai )
ai
{
}
poiché, essendo prN (rN ) positiva ed indipendente da ai , non interviene nella determinazione del massimo.
Discende dalla (IV.1.13) che la decisione sul simbolo a j è fatta se rN è contenuto in
un sottoinsieme R j del sottospazio S N essendo R j definito dall’insieme dei punti rN tali
che:
(IV.1.14)
rN ∈ R j
{
}
prN|a j (rN | a j ) = arg max prN|ai (rN | ai )
se
ai
Ciò equivale a definire una partizione
{ R1, R2 ,… , RM }
del sottospazio S N in M sottoin-
siemi disgiunti tali che
•
M
∪ R j = SN
con
Ri ∩ R j = ∅
(i ≠ j )
j =1
•
ogni sottoinsieme R j contiene il solo elemento s j della costellazione dei segnali,
per modo che se rN è contenuto in R j il ricevitore prende la decisione a favore del simbolo a j Le regioni così definite costituiscono le regioni di decisione .
Per applicare la regola di decisione formulata dalla (IV.1.13) o (IV.1.14) occorre conoscere le densità di probabilità condizionate prN |a i (rN | ai ) . Tenendo conto della (IV.1.1), si
deduce immediatamente:
(IV.1.15)
prN |ai (rN | ai ) = pnN (rN − si )
essendo pn N (rN − si ) la densità di probabilità vettore n N valutata in corrispondenza del
valore r N − si .
- 48 -
G. Mamola: Lezioni di Comunicazioni Elettriche
Se il rumore n (t ) è gaussiano, le quantità νi , definite dalla (IV.1.7), in quanto ottenute
da n (t ) mediante operazioni lineari, presentano una distribuzione congiunta gaussiana
per caratterizzare la quale occorre definire il valore medio statistico delle variabili casuali
νi e gli elementi della matrice di correlazione. Se n (t ) è caratterizzato da un valore medio
nullo e da una densità spettrale pari a
si ha:
E {ν i } = ∫ E {n(t )} ui (t )dt = 0
T
(IV.1.16)
0
e
(IV.1.17)
N0
2
{∫ ∫ n(t )n(t )u (t )u (t )dt dt } = ∫ ∫ E {n(t )n(t )} u (t )u (t )dt dt
E {ν i ν j } = E
T
T
0
0
1
2
1
i
j
2
1
2
T
T
0
0
1
2
i
1
j
2
1
2
che, essendo
E {n(t1 )n(t2 )} =
(IV.1.18)
N0
δ(t2 − t1 )
2
diventa
(IV.1.19)
E {ν i ν j } = ∫
T
0
∫
T
0
N0
N
δ(t2 − t1 )ui (t1 )u j (t2 )dt1dt2 = 0
2
2
∫
T
0
⎧ N0
⎪
ui (t )u j (t )dt = ⎨ 2
⎪⎩0
(i = j )
(i ≠ j )
dato che le funzioni di base costituiscono un insieme di funzioni orto-normali. Le quantità νi e ν j sono pertanto incorrelate e, in quanto gaussiane, statisticamente indipendenti.
N0
2
Poiché la loro varianza vale
si può scrivere:
N
pnN (nN ) = ∏ pn (ν k ) =
(IV.1.20)
k =1
(
1
πN 0
)
⎛ 1
exp ⎜ −
⎝ N0
N
N
∑ν
k =1
2
k
⎞
⎟
⎠
e di conseguenza la funzione p( r N | ai ) , data dalla (IV.1.15), diventa:
p(rN | ai ) =
(IV.1.21)
(
1
πN 0
)
N
⎛ 1
exp ⎜ −
⎝ N0
N
∑ (ρ
k =1
k
⎞
− sik ) 2 ⎟
⎠
Se i dati sono equiprobabili, la regione di decisione R j definita dall’insieme dei punti
le cui coordinate ρ j
⎛ 1
exp ⎜ −
⎝ N0
(IV.1.22)
soddisfano la seguente condizione:
(i = 1, 2, … , N )
N
∑ (ρ
k =1
k
⎧⎪
⎞
⎛ 1
− s jk ) 2 ⎟ = max ⎨exp ⎜ −
⎠ (i ≠i j ) ⎪⎩
⎝ N0
N
∑ (ρ
k =1
k
⎞ ⎫⎪
− sik ) 2 ⎟ ⎬
⎠ ⎭⎪
che può essere riscritta nella forma:
N
∑ (ρ
(IV.1.23)
k =1
k
⎧N
⎫
− s jk ) 2 = min ⎨∑ (ρk − sik ) 2 ⎬
i
⎭
( i ≠ j ) ⎩ k =1
Osservando che la quantità:
N
d 2j = ∑ ( ρk − s jk )
(IV.1.24)
2
k =1
rappresenta il quadrato della distanza euclidea tra il vettore ricevuto rN e la segnalazione
s j , dalla (IV.1.24) si deduce che il ricevitore decide a favore del simbolo a j se la distanza
d j fra il segnale ricevuto r N e la corrispondente segnalazione s j è la minima fra le di-
stanze di valutate sempre da r N con le rimanenti segnalazioni si corrispondenti ai simboli ai (i ≠
(IV.1.25)
j) .
In altri termini:
a j = arg min di
i
Cap. IV - La rivelazione in presenza di rumore
- 49 -
IV.2. - Struttura del ricevitore ottimo.
La regola di decisione ottima, formulata nel precedente paragrafo, suggerisce una
struttura del ricevitore ottimo come è quella riportata in Fig. IV.2 nel caso di simboli equiprobabili.
Si nota dalla Fig. IV.2 che tale struttura è basata sulla operazione di correlazione fra il
segnale in ingresso r (t ) e le funzioni di base ui ( t ) . Poiché queste ultime sono dipendenti
dalle forme di segnalazione si (t ) , le funzioni ui ( t ) sono note al ricevitore se è possibile ricostruire esattamente i segnali si (t ) . Un tale tipo di ricevitore è chiamato ricevitore coerente.
u1 (t )
T
∫0
(⋅)dt
T
∫0
(⋅)dt
T
(⋅)dt
ρ0
u2 (t )
r (t )
ρ1
Scegli
il
minimo
Calcola d j
u N (t )
∫0
sˆ(t ) = s j (t )
ρN −1
Fig. IV.2 – Struttura I del ricevitore ottimo. Utilizzo delle funzioni di base.
Sviluppando la (IV.1.24) si deduce:
N
N
N
k =1
k =1
k =1
d 2j = ∑ ρk2 − 2∑ ρk s jk + ∑ s 2jk
(IV.2.1)
Si noti che la quantità
∑ k ρ k s jk
rappresenta il prodotto scalare fra il segnale rN e la se-
gnalazione si . Dal momento che rN è la proiezione ortogonale di r nel sottospazio S N , tale prodotto scalare coincide con ( r, si ) e cioè:
N
∑ρ s
(IV.2.2)
k =1
T
k ik
= ∫ r (t ) si (t )dt
0
Essendo inoltre:
N
∑s
(IV.2.3)
k =1
2
ik
T
= ∫ si2 (t )dt = Ei
0
la regola di decisione (IV.1.25) diventa:
(IV.2.4)
T
aˆ = a j ⇒ ∫ r (t ) s j (t )dt −
0
Ej ⎫
⎧ T
= max ⎨ ∫ r (t ) si (t )dt − ⎬
0
i
2
2 ⎭
⎩
Ej
Dalla (IV.2.4) si deduce la struttura del ricevitore ottimo riportata in Fig. IV.3, dove le
correlazioni sono stavolta effettuate tra il segnale ricevuto e le forme d’onda di segnalazione.
Dal confronto fra le Fig. IV.2 e IV.3 si evince che la struttura riportata in Fig. IV.2 risulta più semplice di quella di Fig. IV.3 dato che è N ≤ M . Nel caso in cui è N = M , le
due strutture sono equivalenti perché contengono lo stesso numero di correlatori.
- 50 -
G. Mamola: Lezioni di Comunicazioni Elettriche
− 12 E1
s1 (t )
T
∫0 (⋅)dt
− 12 E2
s2 (t )
T
∫0 (⋅)dt
r (t )
Scegli
il
minimo
sˆ(t ) = s j (t )
− 12 EM
s M (t )
T
∫0 (⋅)dt
Fig. IV.3 – Struttura II del ricevitore ottimo. Utilizzo delle forme di segnalazione
Il segnale in uscita dal generico integratore vale:
zk =
(IV.2.5)
T
∫0 r (t )sk (t )dt
che ponendo
hk (t ) = sk (T − t )
(IV.2.6)
diventa:
zk =
(IV.2.7)
T
∫0 r (t )hk (T − t )dt
che può essere interpretata come il valore del segnale in uscita dal filtro di risposta impulsiva (IV.2.6) quando la suo ingresso è applicato il segnale r (t ) , all’istante T . Lo schema di Fig. IV.2 può pertanto essere realizzato come mostrato in Fig. IV.4 e cioè sulla base
{
} j =1 .
dei filtri adattati alle forme di segnalazione s j (t )
M
1
T
h1 (t )
Camp.
1
T
r(t )
h2 (t )
Camp.
Calcola d j
Scegli sˆ(t ) = s (t )
j
il
massimo
1
T
hM (t )
Camp.
Fig. IV.4 – Struttura III del ricevitore ottimo. Utilizzo dei filtri adattati.
IV.3 - Segnalazione binaria.
Nel caso di segnalazione binaria siano s0 (t ) e s1 (t ) le forme di segnalazione associate ai
simboli d = 0 e d = 1 rispettivamente supposti equiprobabili. Tali forme di segnalazione
possono essere rappresentate in un sottospazio a due dimensioni S 2 individuato da una
base ortonormale (u 0 , u1 ) come è mostrato in Fig. IV.5.
Cap. IV - La rivelazione in presenza di rumore
- 51 -
Per valutare la probabilità di errore si prenda in esame la trasmissione del simbolo
d = 0 . Si commette errore quando la distanza tra r2 e s1 è minore di quella tra r2 e s0 . Si
può quindi scrivere:
(IV.3.1)
{
Pe|0 = Pr r2 − s0
{
= Pr n2
Poiché risulta:
n2
2
2
> r2 − s1
2
2
} {
d = 0 = Pr ( s0 + n2 ) − s0
> n2 − ( s1 − s0 )
2
} = Pr { n
2
2
2
> ( s0 + n2 ) − s1
2
}=
2
}
}
− n2 − ( s1 − s0 ) > 0
2
− n2 − ( s1 − s0 ) = n2T n2 − [ n2 − ( s1 − s0 ) ] [ n2 − ( s1 − s0 ) ] =
T
2
= n2T n2 − ⎣⎡ n2T n2 − n2T ( s1 − s0 ) − ( s1 − s0 )T n2 + ( s1 − s0 )T ( s1 − s0 ) ⎦⎤ =
(IV.3.2)
= n2T ( s1 − s0 ) + ( s1 − s0 )T n2 − ( s1 − s0 )T ( s1 − s0 ) =
= 2( s1 − s0 )T n2 − s1 − s0
2
la (IV.3.1) si può scrivere:
r2
u1
d0
s0
1
2
s1 − s0
D’altra parte è facile riconoscere che la quantità
x = ( s1 − s0 )T n2 , in quanto combinazione lineare di variabili
d1
s1
aleatorie gaussiane, è anch’essa una variabile aleatoria
u0
gaussiana di valore medio:
(IV.3.4)
E { x} = ( s1 − s0 )T E {n2 } = 0
Fig. IV.5 – Segnalazione binaria
(IV.3.5)
{
Pe|0 = Pr ( s1 − s0 )T n2 >
(IV.3.3)
e varianza:
E { x 2 } = E {( s1 − s0 )T n2 n2T ( s1 − s0 )} = ( s1 − s0 )T E {n2 n2T } ( s1 − s0 ) =
=
N0
2
s1 − s0
2
=
N0
2
N0
2
( s1 − s0 )T I 2 ( s1 − s0 ) =
D2
dove si è indicato con
(IV.3.6)
D = s1 − s0
la distanza euclidea fra le due segnalazioni. Risulta allora:
px ( x ) =
(IV.3.7)
−
1
πN 0 D 2
e
x2
N0 D 2
La probabilità di errore Pe |0 vale dunque:
(IV.3.8)
∞
Pe|0 = ∫1
2
D2
px ( x )dx =
1
πN 0 D 2
∫
∞
1D
2
e
2
2
− x 2
N0 D
dx
che si può porre nella forma:
(IV.3.9)
2
⎪⎧ D ⎪⎫
Pe|0 = Q ⎨
⎬
⎪⎩ 2 N 0 ⎭⎪
Poichè risulta, per simmetria, Pe |0 = Pe |1 , è:
(IV.3.10)
⎧⎪ D 2
Pe = Q ⎨
⎩⎪ 2 N 0
⎫⎪
⎬
⎭⎪
Nella segnalazione binaria la probabilità di errore dipende dalla distanza euclidea fra
le due segnalazioni.
- 52 -
G. Mamola: Lezioni di Comunicazioni Elettriche
IV.4 - Sistemi di modulazione binari.
Le considerazioni svolte al paragrafo precedente sono qui applicate ai sistemi di modulazione binari presentati al Cap. III. In quel che segue si suppone che i simboli siano equiprobabili.
IV.4.1 - Modulazioni ASK e PSK.
Nel caso di modulazione ASK o PSK le forme di segnalazione, corrispondenti ai simboli
d = 0 e d = 1 , sono date dalla:
( )
( )
⎧ s (t ) = −V rect t − T2 cos(2πf t + ϕ)
0
0
T
⎪ 0
⎨
T
⎪ s1 (t ) = V0 rect t − 2 cos(2πf 0 t + ϕ)
T
⎩
(IV.4.1)
che, com’è noto, possono essere rappresentate nel sottospazio S1 ad una dimensione,
generato dalla funzione di base:
u (t ) =
(IV.4.2)
2
T
rect
( ) cos(2πf t + ϕ)
t−
T
2
0
T
dai vettori:
−V0
T
2
V0 T
2
0
s0
⎧⎪ s0 = −V0 T2 u
⎨
T
⎪⎩ s1 = V0 2 u
(IV.4.3)
s1
u
Fig. IV 6 – Costellazione dei segnali
e regioni di decisione per segnalazione ASK o PSK binaria.
e la costellazione dei segnali si presenta come è mostrato in Fig. IV.6. La regola di decisione è:
T
dˆ = 1 ⇒ ρ = r (t )u (t )dt > 0
∫
dˆ = 0 ⇒ ρ = ∫
(IV.4.4)
0
T
0
r (t )u (t )dt < 0
che, ricordando la (IV.4.2) diviene:
T
dˆ = 1 ⇒ ∫ r (t ) cos(2πf 0 t + ϕ)dt > 0
0
(IV.4.5)
T
dˆ = 0 ⇒ ∫ r (t ) cos(2πf 0 t + ϕ)dt < 0
0
che dà luogo allo schema del ricevitore
cos(2πf0t + ϕ)
mostrato in Fig. IV.7.
Essendo
D = 2V0
(IV.4.6)
r(t)
T
2
di
errore,
(⋅)dt
0
la distanza fra le due segnalazioni, la
probabilità
∫
T
data
(IV.3.10), vale:
⎛ V 2T
Pe = Q ⎜ 0
⎜ N0
⎝
⎞
⎟
⎟
⎠
Introducendo l’energia media per simbolo
T
V 2T
1 T
E = ⎛⎜ ∫ s02 (t )dt + ∫ s12 (t )dt ⎞⎟ = 0
(IV.4.8)
0
2⎝ 0
2
⎠
la Pe può essere riscritta nella forma:
(IV.4.9)
ρ>0
Decisione
ρ<0
d =1
d=0
Fig. IV.7 – Struttura del ricevitore ottimo per segnalazioni ASK o PSK binarie.
dalla
(IV.4.7)
ρ
⎛ 2E ⎞
Pe = Q ⎜
⎜ N ⎟⎟
0 ⎠
⎝
Cap. IV - La rivelazione in presenza di rumore
- 53 -
IV.5.2 - Modulazione FSK.
Le forme d’onda di segnalazione, corrispondenti ai simboli d = 0 e d = 1 , sono:
⎧ s (t ) = V rect t − T2 cos[2π( f − Δf )t + ϕ]
0
0
T
⎪ 0
(IV.4.10)
⎨
T
⎪ s1 (t ) = V0 rect t − 2 cos[2π( f 0 + Δf )t + ϕ]
T
⎩
( )
( )
che appartengono ad un sottospazio S 2 a due dimensioni che può essere individuato dalle funzioni di base
⎧u (t ) =
⎪ 0
⎨
⎪u1 (t ) =
⎩
(IV.4.11)
( ) cos[2π( f − Δf )t + ϕ]
rect ( ) cos[2π( f + Δf )t + ϕ]
2
T
rect
T
2
0
T
T
t−
2
2
T
0
T
che, come è stato precisato in precedenza, co-
u1
V0
t−
stituiscono un riferimento ortonormale se ri-
d1
T
2
r2
R1
sulta TΔf = k . In tali condizioni, la rappresen-
d0
R0
V0
tazione vettoriale dei segnali s0 (t ) e s1 (t ) è data
u0
T
2
Fig. IV.8 – Costellazione dei segnali e regioni
di decisione per segnalazione FSK binaria.
dalla (vedi Fig. IV.8):
⎧⎪ s0 = V0
(IV.4.12)
⎨
⎪⎩ s1 = V0
T
2
u0
T
2
u1
Nel caso di simboli equiprobabili, la decisione è presa se il punto r2 appartiene ad uno
dei due semipiani R0 e R1 separati dalla prima bisettrice. In particolare:
dˆ = 0 ⇒ ρ0 > ρ1
(IV.4.13)
dˆ = 1 ⇒ ρ0 < ρ1
T
T
0
0
dove ρ0 = ∫ r (t )u0 (t )dt e ρ1 = ∫ r (t )u1 (t )dt denotano le componenti del segnale ricevuto lungo le direzioni individuate dai vettori di base u 0 e u1 rispettivamente.
cos[2π( f0 − Δf )t + ϕ]
∫
T
( ⋅)dt
ρ0
0
ρ 0 > ρ1
0
+
r (t )
Decisione
∫ ( ⋅)dt
ρ 0 < ρ1
T
0
d=0
d=1
ρ1
cos[2π( f 0 + Δf )t + ϕ]
Fig. IV.9 – Struttura del ricevitore ottimo per segnalazione FSK binaria.
Ricordando le (IV.4.11) le precedenti si possono scrivere:
(IV.4.14)
od anche
T
T
T
T
dˆ = 0 ⇒
∫0 r (t ) cos[2π( f0 + Δf )t + ϕ]dt > ∫0 r (t ) cos[2π( f0 − Δf )t + ϕ]dt
dˆ = 1 ⇒
∫0 r (t ) cos[2π( f0 + Δf )t + ϕ]dt < ∫0 r (t ) cos[2π( f0 − Δf )t + ϕ]dt
- 54 -
(IV.4.15)
G. Mamola: Lezioni di Comunicazioni Elettriche
T
T
T
T
dˆ = 0 ⇒
∫0 r (t ) cos[2π( f0 + Δf )t + ϕ]dt − ∫0 r (t ) cos[2π( f0 − Δf )t + ϕ]dt > 0
dˆ = 1 ⇒
∫0 r (t ) cos[2π( f0 + Δf )t + ϕ]dt − ∫0 r (t ) cos[2π( f0 − Δf )t + ϕ]dt < 0
che danno luogo allo schema del ricevitore mostrato in Fig. IV.9.
Poiché la distanza euclidea fra le due segnalazioni vale D = 2V0
T
la probabilità di
2
errore diventa:
⎛ V 2T ⎞
Pe = Q ⎜ 0 ⎟
⎜ 2N0 ⎟
⎝
⎠
(IV.4.16)
1
FSK
10−1
Pe
10−2
ASKo PSK
10−3
10−4
10−5
-10
-5
E
[dB]
N0
0
10
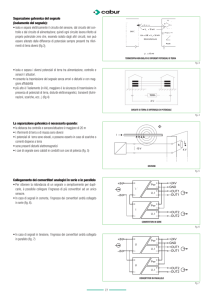
Fig. IV.10 - Probabilità di errore in funzione del rapporto segnale rumore
E / N 0 per i sistemi di modulazione binari ASK (PSK) e FSK.
L’energia media per simbolo vale:
E=
(IV.4.17)
V02T
2
e quindi la probabilità di errore è:
⎛ E ⎞
Pe = Q ⎜
⎜ N ⎟⎟
0 ⎠
⎝
(IV.4.18)
In Fig. IV.10 sono riportati gli andamenti della probabilità di errore in funzione del
rapporto segnale rumore E / N 0 per i sistemi di modulazione binari fin qui analizzati.
IV.5 - Sistemi di modulazione M -ari.
IV.5.1 - Sistemi di modulazione ASK M -ari.
Negli schemi di modulazione ASK M -ari le forme di segnalazione sono
(IV.5.1)
⎛ t − T2 ⎞
⎟ cos(2πf 0 t
⎝ T ⎠
sm (t ) = V0 am rect ⎜
+ ϕ)
( m = 1, 2 … , M )
con
(IV.5.2)
am = 2m − ( M + 1)
( m = 1, 2 … , M )
Esse appartengono ad un sottospazio monodimensionale S1 perché possono essere rappresentate dall’unica funzione di base:
Cap. IV - La rivelazione in presenza di rumore
u (t ) =
(IV.5.3)
2
T
rect
- 55 -
( ) cos(2πf t + ϕ)
t − T2
T
0
La rappresentazione vettoriale è data dai vettori:
sm = V0 am
(IV.5.4)
T
2
u
e la costellazione dei segnali
V0 a1
T
2
V0 am
R1
T
2
V0 aM
Rm
T
2
è rappresentata in Fig. IV.11.
u
RM
Usando la stessa procedu-
Fig. IV.11 – Costellazione dei segnali e regioni di decisione per segnalazione ASK M -aria.
ra di quella adoperata per la
valutazione della probabilità di errore nella segnalazione ASK M -aria in banda base, è
facile verificare che la probabilità di errore per simbolo può essere espressa dalla:
M − 1 ⎛ V02T ⎞
⎟
(IV.5.5)
Pe = 2
Q⎜
⎜ N0 ⎟
M
⎝
⎠
L’energia media associata alle forme di segnalazione è:
V 2T
V 2T M 2 − 1
E = 0 E {am2 } = 0
(IV.5.6)
2
2
3
per cui la (IV.5.5) diviene:
Pe = 2
(IV.5.7)
M − 1 ⎛⎜
Q
⎜
M
⎝
E ⎞⎟
( M 2 − 1) N0 ⎟⎠
6
1
Pe
8
32
4
−1
10
16
M =2
10−2
10−3
-5
0
5
10
E
[dB]
N0
20
Fig. IV.12 – Probabilità di errore per simbolo per segnalazioni
ASK M -arie in funzione del rapporto segnale rumore E / N 0 .
In Fig.IV.12 sono rappresentati gli andamenti del rapporto segnale rumore E / N 0 per
diversi valori del parametro M .
Se il sistema di modulazione è adoperato per la trasmissione di informazione binaria,
allora, ad ogni gruppo di m simboli binari si può associare uno fra M = 2m livelli distinti.
Inoltre se si suppone che il rapporto E / N 0 sia abbastanza elevato è lecito considerare
trascurabile la probabilità che ogni errore commesso dal ricevitore corrisponde alla rive-
- 56 -
G. Mamola: Lezioni di Comunicazioni Elettriche
lazione di un simbolo non adiacente a quello trasmesso. In queste circostanze, se si adotta la codifica di Gray, la probabilità di errore per bit è data dalla
⎛
P
M −1
6
E ⎞⎟
(IV.5.8)
Pb = e = 2
Q⎜
m
M log 2 M ⎜ ( M 2 − 1) N 0 ⎟
⎝
⎠
IV.5.2 - Sistemi di modulazione PSK M -ari.
Negli schemi di modulazione PSK M -ari, le forme di segnalazione sono:
sm (t ) = V0 rect
(IV.5.9)
( ) cos ( 2πf t +
t − T2
0
T
2 πm
M
+ ϕ)
con m = 1, 2, …, M che sono rappresentate nel sottospazio bidimensionale individuato dalle
due funzioni di base
u0 (t ) =
(IV.5.10)
2
T
u1 (t ) =
( ) cos(2πf t + ϕ)
rect ( ) sin(2πf t + ϕ)
rect
2
T
t − T2
0
T
t − T2
0
T
Con riferimento alla Fig. IV.13 è evidente che sotto
u1
ϑj +1
l’ipotesi che i simboli vengano emessi con eguale probabilità, il ricevitore decide a favore di quel simbolo a j
cui corrisponde la fase ϑ j =
2πj
M
ϑj
r2
ϑ j −1
che è la più vicina
u0
all’angolo formato dal vettore ricevuto r2 . Detti pertanto
ρ 0 e ρ1 le componenti del vettore r2 lungo i versori u 0 e
u1 rispettivamente, la stima ϑˆ j della fase ϑ j può essere
Fig. IV.13 – Regola di decisione per
modulazioni PSK M -arie.
effettuata valutando la quantità:
ϑ = arg(r2 )
ˆ
e attribuendo a ϑ j quel valore, fra le fasi possibili, che si trova più vicino a ϑ .
(IV.5.11)
Ciò dà luogo allo schema del ricevitore mostrato in Fig. IV.14.
u0 (t)
ρ0
∫0 (⋅)dt
T
Calcolaϑ
ϑ
ϑj = min{ϑ−ϑi }
ˆ ϑ
ϑ=
j
i
(i j)
T
∫0 (⋅)dt
ρ1
u1(t)
Fig. IV.14 - Ricevitore ottimo per modulazioni PSK M -arie.
Per determinare la probabilità di errore basta far riferimento alla probabilità di corretta decisione. Se il simbolo inviato è ϑ j la rivelazione è corretta se ϑ è contenuto
(
nell’intervallo ϑ j −
(IV.5.12)
π
M
,ϑ j +
π
M
) per cui è
Pc =
M
ϑ j + Mπ
∑ M ∫ϑ −
1
j =1
j
π
M
p (ϑ | ϑ j ) d ϑ
dove con p(ϑ ϑ j ) si è denotata la densità di probabilità di ϑ noto che sia il simbolo ϑ j
trasmesso. Tenendo infine conto che, per la simmetria del sistema, la p(ϑ ϑ j ) non dipende dal particolare simbolo trasmesso, la precedente può scriversi come segue:
(IV.5.13)
Pc =
π
M
∫−
π
M
p (ϑ | ϑ M ) d ϑ
Cap. IV - La rivelazione in presenza di rumore
- 57 -
Per valutare la p(ϑ | ϑM ) basta osservare che, essendo ϑM = 2π , le componenti ρ 0 e ρ1
del vettore r 2 valgono:
ρ0 = V0
(IV.5.14)
T
2
+ ν0
ρ1 = ν1
Se n(t ) è un rumore gaussiano e bianco e ( u0 , u1 ) costituisce un riferimento ortonormale, le quantità ν0 e ν1 sono variabili aleatorie gaussiane ed indipendenti caratterizzate
da un valore medio nullo e da varianze eguali e pari a N 0 / 2 . Risulta:
p(ρ0 , ρ1 | ϑM ) =
(IV.5.15)
(
⎧ 1 ⎡
1
exp ⎨−
⎢ ρ0 − V0
πN 0
⎩ N0 ⎣
T
2
)
2
⎤⎫
+ ρ12 ⎥ ⎬
⎦⎭
Introducendo la seguente trasformazione di variabili:
⎧ρ0 = ρ cos ϑ
(IV.5.16)
⎨
⎩ρ1 = ρ sin ϑ
la precedente può essere riscritta in termini di ρ e ϑ come segue:
p(ρ, ϑ | ϑM ) =
(IV.5.17)
(
⎧ 1 2
ρ
exp ⎨−
ρ + V02 T2 − 2ρV0
N
πN 0
0
⎩
D’altra parte si ha:
ρ2 + V02 T2 − 2ρV0
(IV.5.18)
T
2
(
= (ρ − V
cos ϑ = ρ − V0
T
2
0
T
2
)
cos ϑ )
cos ϑ
2
2
T
2
)
⎫
cos ϑ ⎬
⎭
+
V02T
2
(1 − cos ϑ) =
+
V02T
2
sin 2 ϑ
E
N0
⎞
cos ϑ ⎟
⎠
2
cosicché la (IV.5.17) assume la forma:
p(ρ, ϑ | ϑM ) =
(IV.5.19)
essendo E =
V02T
2
⎧⎪ ⎛ ρ
ρ − NE0 sin 2 ϑ
−
e
exp ⎨− ⎜
N
πN 0
⎪⎩ ⎝ 0
2⎫
⎪
⎬
⎭⎪
l’energia media di segnalazione.
Dalla (IV.5.19) è possibile ricavare la densità di probabilità della fase ϑ integrando rispetto a ρ :
p (ϑ | ϑ M ) =
(IV.5.20)
⎧⎪ ⎛ x
1 − NE0 sin 2 ϑ ∞
e
x exp ⎨− ⎜
−
∫
N
0
2π
⎪⎩ ⎝ 0
E
N0
2
⎞ ⎫⎪
cos ϑ ⎟ ⎬ dx
⎠ ⎭⎪
che, con alcuni passaggi, può essere posta nella forma:
−
E
e N0
p ( ϑ | ϑM ) =
2π
(IV.5.21)
2
⎪⎧
πE NE cos ϑ ⎡1 + erf ⎛ E cos ϑ ⎞ ⎤ ⎪⎫
⎨1 + cos ϑ N e 0
⎢
⎜ N
⎟⎥ ⎬
0
0
⎝
⎠ ⎦ ⎭⎪
⎪⎩
⎣
il cui andamento in funzione del parametro
p(ϑ ϑM )
E
N0
è
mostrato in Fig. IV.15).
15
La probabilità di corretta decisione vale:
(IV.5.22)
10
E
=1 dB
N0
π
2
−
π
4
π
4
π
2
ϑ
Fig. IV.15 - p ( ϑ | ϑ M ) in funzione di ϑ e
per diversi valori di E / N 0 .
π
M
− Mπ
p (ϑ | ϑM ) d ϑ
e la corrispondente probabilità di errore per sim5
−
Pc = ∫
bolo:
(IV.5.23)
Pe = 1 − ∫
π
M
− Mπ
p (ϑ | ϑ M ) d ϑ
È da osservare che la (IV.5.23) non può
essere risolta in forma chiusa, tranne quando
- 58 -
G. Mamola: Lezioni di Comunicazioni Elettriche
non sia M = 2 e M = 4 .
Gli andamenti della Pe in funzione del
E
rapporto segnale rumore
ottenuti per
N0
1
Pe
16
8
10−1
4
integrazione numerica della (IV.5.21), sono
riportati in Fig. IV.16 per alcuni valori del
M =2
10−2
numero dei livelli M . Dalla figura si rileva
che, per un assegnato valore della probabili-
10−3
tà di errore, il rapporto segnale rumore aumenta al crescere del numero dei livelli o,
10−4
che è lo stesso, aumentando M , occorre
impegnare una più elevata potenza per ot-
10−5
tenere le stesse prestazioni in termini di
-4
-2
0
2
4
E
[ dB ]
N0
8
10
Fig. IV.16 - Probabilità di errore per segnalazioni
M -PSK in funzione di E / N 0 per alcuni valori di M .
probabilità di errore.
Nel caso che tale segnalazione è impiega-
ta per la trasmissione di informazione binaria, si può determinare la probabilità di errore
per bit, nell’ipotesi che, in presenza di codifica di Gray, il rapporto segnale rumore sia
sufficientemente elevato. Si ottiene:
Peb =
(IV.5.24)
Pe
log 2 M
IV.6.3 - Sistemi di modulazione FSK M -ari.
Nel caso di modulazione FSK M -aria le forme di segnalazione sono:
(IV.5.25)
sm (t ) = V0 cos[2π( f 0 + Δf m )t + ϕ]rect
in cui le quantità:
(IV.5.26)
Δf m = [ 2m − ( M + 1) ] Δf
( )
t − T2
T
( m = 1, 2, … , M )
( m = 1, 2, … , M )
rappresentano i valori della deviazione di frequenza associati ai segnali sm (t ) . Se si riferiscono le forme di segnalazione, definite dalle (IV.5.25), al sistema di funzioni ortonormali
(se è TΔf = k )
(IV.5.27)
um (t ) =
2
T
rect
( ) cos[2π( f + Δf )t + ϕ]
t − T2
T
m
0
( m = 1, 2, … , M )
risulta:
(IV.5.28)
sm = V0
T
u
2 m
Se i simboli sono equiprobabili, è presa una decisione a favore della segnalazione s j
se, detto rN il vettore ricevuto, risulta:
(IV.5.29)
d (rN , s j ) = min {d (rN , si )}
i
Poiché è:
(IV.5.30)
d 2 (rN , s j ) = rN
2
− 2(rN , si ) + si
2
con
(IV.5.31)
si
2
= V02
T
2
indipendente da i , la condizione (IV.5.29) si traduce nella:
Cap. IV - La rivelazione in presenza di rumore
- 59 -
(rN , s j ) = max {(rN , si )}
(IV.5.32)
i
la quale, ricordando che è:
T
zi ≡ (rN , si ) = ∫ r (t ) si (t )dt
(IV.5.33)
0
conduce allo schema del rivelatore
s1(t)
T
z1
T
z2
∫0 (⋅)dt
Per valutare la probabilità di
s2 (t)
∫0 (⋅)dt
r(t)
sM (t)
riportato in Fig. IV.17.
Scegli il
massimo
corretta decisione si consideri il
aˆ = aj
caso in cui sia s1 la segnalazione
trasmessa. Il vettore ricevuto vale
zM
T
∫0 (⋅)dt
quindi:
(IV.5.34)
Fig. IV.17 - Schema del ricevitore ottimo per segnalazioni M FSK.
rN = s1 + nN = V0
T
u
2 1
+ nN
Il ricevitore effettua la decisione
sulla base delle variabili zi definite dalle (IV.5.33), o equivalentemente sulle base delle
variabili wi , ad esse proporzionali, definite dalle:
T
w1 = ∫ r (t )u1 (t )dt = V0
T
2
0
T
(IV.5.35)
+ ν1
wi = ∫ r (t )ui (t )dt = νi
(i = 2, 3, … , M )
0
dove le componenti del rumore νi = (nN , ui ) sono variabili aleatorie gaussiane, indipendenti a media nulla e varianza
N0
2
. Di conseguenza le densità di probabilità del primo or-
dine associate alle wi valgono:
(
pw1 ( w1 ) =
⎡ 1
exp ⎢ −
w1 − V0
πN 0
⎣ N0
pwi ( wi ) =
⎡ 1 2⎤
exp ⎢ −
wi ⎥
πN 0
⎣ N0
⎦
(IV.5.36)
1
1
T
2
) ⎤⎥⎦
2
(i = 2,…, M )
Poiché la condizione (IV.5.32) è espressa dalla:
w2 < w1 , w3 < w1 , …, wM < w1
(IV.5.37)
la probabilità di corretta decisione vale:
(IV.5.38)
Pc|a1 = Pr {w2 < w1 , w3 < w1 ,…, wM < w1}
che si può porre nella forma:
(IV.5.39)
Pc|a1 = ∫
∞
−∞
Pr {w2 < w1 , w3 < w1 ,…, wM < w1 | w1} pw1 ( w1 )dw1
dove si è introdotta la probabilità dell’evento condizionato {w2 < w1 , w3 < w1 , …, wM < w1 | w1} .
Poiché gli eventi
{wi < w1 | w1}
sono indipendenti, la probabilità dell’evento condizionato,
che compare nell’integrando della (IV.5.39), è data dal prodotto delle M −1 probabilità
marginali:
(IV.5.40)
Pr {wi < w1 | w1} =
1
πN 0
wi2
w1 − N
0
∫−∞ e
(i = 2, 3, … , M )
dwi
Ponendo nella precedente:
(IV.5.41)
x=
w1
N0
y=
wi
N0
- 60 -
G. Mamola: Lezioni di Comunicazioni Elettriche
si ottiene:
1
Pr {wi < w1 | w1} =
(IV.5.42)
wi
e
π ∫−∞
− y2
dy =
∞ ⎞ − y2
1 ⎛ ∞
⎜ ∫−∞ − ∫x ⎟ e dy = 1 − Q( 2 x)
⎠
π⎝
La probabilità di corretta decisione, essendo i simboli equiprobabili, vale:
2⎫
⎧ ⎛
M −1
V02T ⎞ ⎪
1 ∞ ⎡
⎪
⎤
⎜
⎟
(IV.5.43)
Pc =
1 − Q( 2 x) ⎦
exp ⎨ − x −
⎬ dx
2 N0 ⎟ ⎪
π ∫−∞ ⎣
⎪ ⎜⎝
⎠
⎩
⎭
e quindi la probabilità di errore:
Pe = 1 −
(IV.5.44)
∞
1
⎡1 − Q( 2 x) ⎤
⎦
π ∫−∞ ⎣
M −1
2⎫
⎧ ⎛
V02T ⎞ ⎪
⎪
⎟ ⎬ dx
exp ⎨ −⎜ x −
2 N0 ⎟ ⎪
⎪ ⎜⎝
⎠ ⎭
⎩
Poiché in tale tipo di modulazione gli impulsi di segnalazione presentano la stessa energia che vale E =
V02T
2
, la probabilità di errore può essere riscritta nella forma:
Pe = 1 −
(IV.5.45)
∞
1
⎡1 − Q(
π ∫−∞ ⎣
2 x) ⎤⎦
M −1
exp
{( )}
−
x−
E
N0
2
dx
il cui andamento è riportato nel diagramma di Fig. IV.18 per alcuni valori del numero M
dei livelli.
Se la segnalazione FSK M -aria è
1
adoperata per la trasmissione di un
Pe
flusso dati binario, ad ogni simbolo
M -ario corrisponde una sequenza di
M =2
10−2
m = log 2 M simboli binari. Poiché nella
modulazione FSK M -aria i simboli
4
M -ari sono rappresentati da punti
10−4
posizionati alla stessa distanza eucli8
dea, se i simboli M -ari sono equiprobabili, commettere un errore sul sim-
10−6
bolo trasmesso equivale a rivelare un
16
qualsiasi altro simbolo adiacente; la
probabilità che un simbolo, diverso da
-4
-2
0
2
4
6
E
[ dB ]
N0
quello trasmesso, sia rivelato, vale
10
Fig. IV.18 – probabilità di errore per segnalazioni M -FSK
in funzione di E / N 0 .
Pe /( M − 1) .
Si supponga adesso che, per un
dato errore sul simbolo trasmesso, ci siano k simboli binari errati; poiché ci sono
⎛n⎞
⎜ ⎟
⎝k⎠
modi distinti con cui ciò si verifica, il numero medio di simboli binari errati per ogni simbolo M -ario errato è (1):
(1) Dalla formula di Newton f ( x ) ≡ (1 + x ) =
m
m
∑ ⎜⎝
k =0
colata in x = 1 fornisce
m
∑ k ⎜⎝ mk ⎟⎠ = m ⋅ 2m −1
k =1
⎛ ⎞
⎛m⎞ k
⎟x
k⎠
discende
df ( x)
dx
≡ m(1 + x) m −1 =
m
∑
k =1
⎛ m ⎞ k −1
⎟x
⎝k⎠
k⎜
che cal-
Cap. IV - La rivelazione in presenza di rumore
m
- 61 -
2m −1
⎛m⎞ P
∑ k ⎜⎝ k ⎟⎠ M e− 1 = M − 1 mPe
(IV.5.46)
k =1
cosicché, essendo i simboli M -ari equiprobabili, la probabilità di errore per bit si ottiene
dividendo per m la precedente. Si ha così:
Pb =
(IV.5.47)
M
Pe
2(m − 1)
IV.6 - Sistemi di modulazione QAM.
La struttura del ricevitore si presenta come è mostrato in Fig. IV.19. All’uscita degli integratori si ottengono le componenti ρ 0 e ρ1 secondo le direzioni individuate dai vettori
u1 e u2 rispettivamente e, se i simboli sono equiprobabili, è presa una decisione sul sim-
bolo trasmesso secondo la regola
(IV.6.1)
d (r2 , s j ) = min {d (r2 , si )}
i
(i ≠ j )
Poiché le componenti in fase e
u0 (t)
T
∫0 ()⋅ dt
ρ0
in quadratura del segnale QAM
ricevuto
Calcola il
minimo di
d(r2 , si )
r(t)
u1(t)
T
∫0 ()⋅ dt
ŝ
sono
indipendenti,
è
immediato rendersi conto che la
probabilità di corretta decisione
ρ1
per simbolo può essere espressa
dalla:
(IV.6.2)
Fig. IV.19 – Struttura del ricevitore QAM
Pc = (1 − p f )(1 − pq )
dove p f e pq rappresentano le probabilità di errore dei segnali che costituiscono le componenti in fase e in quadratura.
Limitandoci a considerare solo segnalazioni QAM la cui costellazione è costituita da
un graticcio quadrato, si ha tenendo conto della (IV.5.8):
M − 1 ⎛ V02T ⎞
M − 1 ⎛ V02T
⎟
pf = 2
Q⎜
pq = 2
Q⎜
(IV.6.3)
⎜ N0 ⎟
⎜ N0
M
M
⎝
⎠
⎝
per cui la probabilità di errore è:
Pe = 1 − Pc = p f + pq − p f pq =
(IV.6.4)
=4
M − 1 ⎛ V02T
Q⎜
⎜ N0
M
⎝
⎞
⎟
⎟
⎠
M =2
Pe
⎞
⎟
⎟
⎠
10−1
può
10−3
⎞ ⎛ M − 1 ⎞2
⎛ V 2T
⎟ − 4⎜
Q2 ⎜ 0
⎟
⎟ ⎝ M ⎠
⎜ N0
⎠
⎝
che per elevati valori del rapporto
V02T
N0
8
16
essere approssimata dalla:
(IV.6.5)
M − 1 ⎛ V02T
Pe = 4
Q⎜
⎜ N0
M
⎝
32
⎞
⎟
⎟
⎠
Se i simboli sono equiprobabili, l’energia
media associata alle forme di segnalazione è:
2
V 2T 1 ⎡ M 2 M 2 ⎤
2 M −1
(IV.6.6)
E= 0
⎢ ∑ an + ∑ bm ⎥ = V0 T
2 M ⎣ n =1
3
m =1
⎦
10−5
128
10−7
0
5
10
E
[ dB ]
N0
20
Fig. IV. 20 – Probabilità di errore per simbolo in
funzione di E / N 0 per modulazione QAM.
- 62 -
G. Mamola: Lezioni di Comunicazioni Elettriche
che sostituita nella (IV.6.5) fornisce:
Pe = 4
(IV.6.7)
⎛
M −1
3
E
erfc ⎜
2
⎜
M
⎝ M − 1 N0
⎞
⎟⎟
⎠
per cui la probabilità di errore in funzione dell’energia media per simbolo (v. Fig. IV.20).
IV.7 - Limiti della probabilità di errore per simbolo.
Non sempre è possibile ottenere espressioni in forma chiusa della probabilità di errore
per simbolo Pe ; in questi casi può essere molto utile dedurre dei limiti superiore ed inferiore.
IV.7.1 – Limite superore
Un limite superiore può essere dedotto osservando che se si trasmette il segnale s j si
verifica un errore tutte le volte che esiste una segnalazione si con i ≠ j tale che il segnale
ricevuto rN dista da si meno di quanto esso disti da s j . Se pertanto Eij denota l’evento:
{
Eij = rN : d (rN , si ) < d (rN , s j ) | s j
(IV.7.1)
}
la probabilità di errore è espressa dalla:
⎧
⎫
⎪ M
⎪
P (e | s j ) = Pr ⎨ ∪ Eij ⎬
⎪ i =1
⎪
⎩(i ≠ j ) ⎭
(IV.7.2)
Osservando che la probabilità dell’unione di M − 1 eventi è superiormente limitata dalla somma delle probabilità associate ai singoli eventi, dalla (IV.7.2) si deduce:
P (e | s j ) ≤
(IV.7.3)
M
∑ Pr { Eij }
i =1
(i ≠ j )
La probabilità di errore incondizionata è allora limitata dalla:
Pe ≤
(IV.7.4)
M
M
∑ ∑ Pr { Eij }
j =1
Pj
i =1
(i ≠ j )
essendo Pj la probabilità associata alla segnalazione s j .
Se i simboli sono equiprobabili la precedente si riduce alla:
(IV.7.5)
u2
Pe ≤
1
M
M
M
∑ ∑ Pr { Eij }
j =1 i =1
(i ≠ j )
La (IV.7.3) è illustrata in Fig.
s2
s3
s3
ternaria. Supponendo di invia-
u1
u2
s2
IV.21 nel caso di segnalazione
a)
s1
re la segnalazione s1 la probabilità di errore P (e | s1 ) è uguale
u2
s1 b)
u1
s2
s3
alla probabilità che il vettore
c)
s1
u1
ricevuto r2 appartenga alla regione ombreggiata di Fig. IV.20
a), mentre le probabilità associate agli eventi E1 e E2 sono
Fig. IV.21- Limite superiore per la probabilità di errore per simbolo.
date dalle probabilità che r2 sia
Cap. IV - La rivelazione in presenza di rumore
- 63 -
contenuto nelle regioni ombreggiate di Fig. IV.21 b) e c) rispettivamente.
{ }
D’altra parte è facile rendersi conto che la probabilità Pr Eij
che compare nella
(IV.7.5) rappresenta la probabilità di errore di un sistema di trasmissione che usa le segnalazioni si e s j per trasmettere due messaggi equiprobabili. Essa vale:
⎛ D2
ij
Pr Eij = Q ⎜
⎜ 2 N0
⎝
{ }
(IV.7.6)
⎞
⎟
⎟
⎠
essendo Dij la distanza euclidea fra si e s j .
Sostituendo tale espressione nella (IV.7.5) si ha:
2
⎛
1 M M ⎜ Dij
(IV.7.7)
Pe ≤
∑∑Q
M j =1 i =1 ⎜ 2 N 0
(i ≠ j ) ⎝
⎞
⎟
⎟
⎠
Un’ulteriore semplificazione della (IV.7.7) può essere ottenuta se si considera che la
funzione complementare di errore diminuisce al crescere del suo argomento. Questo
comporta che, se si denota con Dj il minimo fra le Dij :
D j = min Dij
(IV.7.8)
i
(i ≠ j )
⎛
Dij2 ⎞⎟
2 N0 ⎟
⎝
⎠
la quantità Q ⎜⎜
⎛
può ritenersi trascurabile rispetto a Q ⎜
⎝
D 2j
2 N0
⎞
⎟ per cui si ottiene facil⎠
mente:
(IV.7.9)
Pe ≤
1
M
⎛ D2
j
N
Q
∑ j ⎜⎜ 2 N0
j =1
⎝
M
⎞
⎟
⎟
⎠
dove con N j si è denotato il numero di segnalazioni che distano Dj da s j .
IV.7.2 – Limite inferiore.
Per dedurre un limite inferiore alla probabilità di errore per simbolo basta osservare
che se si trasmette il simbolo s j si commette errore quando il segnale ricevuto rN è più
vicino a si (con i ≠ j ) che da s j . Pertanto se si denota con E j quello fra gli eventi Eij che
corrisponde a uno dei punti della costellazione più vicini a s j , discende:
(IV.7.10)
Ej ⊂
M
∪ Eij
i =1
(i ≠ j )
Ne consegue:
(IV.7.11)
{ }
P (e | s j ) ≥ Pr E j
e quindi la probabilità incondizionata diventa:
1 M
Pr E j
Pe ≥
(IV.7.12)
M j =1
∑ { }
{ }
Anche in questo caso è facile rendersi conto che la probabilità Pr E j
che compare
nella (IV.7.12) rappresenta la probabilità che il segnale ricevuto quando è trasmesso il
simbolo s j si trova più vicino a quel simbolo che presenta da s j la minima distanza. Essa, ricordando la definizione (IV.7.8) è data dalla:
⎛ D2
j
(IV.7.13)
Pr E j = Q ⎜
⎜ 2 N0
⎝
{ }
⎞
⎟
⎟
⎠
- 64 -
G. Mamola: Lezioni di Comunicazioni Elettriche
Si ha allora:
Pe ≥
(IV.7.14)
1
M
⎛ D2
j
Q⎜
⎜
2
N
0
j =1
⎝
M
∑
⎞
⎟
⎟
⎠
IV.8.3 - Modulazione PSK M -aria.
Nel caso di modulazione PSK M -aria, dalla (IV.7.9),
tenendo presente che è (IV. Fig. IV.22)
D j = 2V0
(IV.7.15)
e
(IV.7.16)
T
2
sin
( )
π
M
Nj = 2
Risulta:
⎛ V 2T
⎛ π ⎞⎞
Pe ≤ 2Q ⎜ 0 sin 2 ⎜ ⎟ ⎟
⎜ N0
⎝ M ⎠ ⎟⎠
⎝
(IV.7.17)
Fig. IV. 22- Modulazione PSK
D’altra parte per (IV.7.14) si ha:
⎛ V 2T
⎛ π ⎞⎞
Pe ≥ Q ⎜ 0 sin 2 ⎜ ⎟ ⎟
⎜ N0
⎝ M ⎠ ⎟⎠
⎝
(IV.7.18)
e di conseguenza:
⎛ V 2T
⎛ π
Q ⎜ 0 sin 2 ⎜
⎜ N0
⎝M
⎝
(IV.7.19)
Poiché
E =
V02T
2
⎛ V 2T
⎞ ⎞⎟
⎛ π
0
sin 2 ⎜
⎟ ⎟ ≤ Pe ≤ 2Q ⎜⎜
N0
⎠⎠
⎝M
⎝
⎞ ⎞⎟
⎟⎟
⎠⎠
è l’energia media delle forme di segnalazione, la precedente diviene:
⎛ 2E 2 ⎛ π ⎞ ⎞
⎛ 2E 2 ⎛ π ⎞ ⎞
Q⎜
sin ⎜ ⎟ ⎟ ≤ Pe ≤ 2Q ⎜
sin ⎜ ⎟ ⎟
⎜ N0
⎜ N0
⎝ M ⎠ ⎟⎠
⎝ M ⎠ ⎟⎠
⎝
⎝
(IV.7.20)
IV.7.1 - Modulazione FSK M -aria.
Nel caso di modulazione FSK M -aria, con segnalazioni ortogonali le distanze Dj sono
tutte eguali e pari a
2V0
T
2
. Inoltre è N j = M − 1 indipendente da j , per cui la (IV.8.9) di-
viene:
⎛ V 2T ⎞
Pe ≤ ( M − 1) ⋅ Q ⎜ 0 ⎟
⎜ 2 N0 ⎟
⎝
⎠
(IV.7.21)
D’altra parte dalla (IV.7.14) discende:
⎛ V 2T ⎞
Pe ≥ Q ⎜ 0 ⎟
⎜ 2 N0 ⎟
⎝
⎠
(IV.7.22)
e quindi vale la seguente limitazione:
⎛ V 2T ⎞
⎛ V 2T ⎞
(IV.7.23)
Q ⎜ 0 ⎟ ≤ Pe ≤ ( M − 1) ⋅ Q ⎜ 0 ⎟
⎜ 2 N0 ⎟
⎜ 2 N0 ⎟
⎝
⎠
⎝
⎠
Poiché
(IV.7.24)
E =
V02T
2
è l’energia media delle forme di segnalazione, la precedente diviene:
⎛ E ⎞
⎛ E ⎞
Q⎜
≤ Pe ≤ ( M − 1) ⋅ Q ⎜
⎟
⎜ N ⎟
⎜ N ⎟⎟
0 ⎠
0 ⎠
⎝
⎝