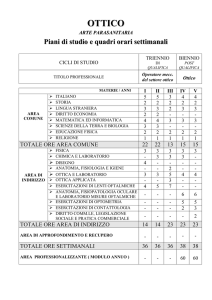
TESI DI LAUREA
UN SISTEMA PER L’IDENTIFICAZIONE
DELLA POSIZIONE DEL DISCO OTTICO
IN IMMAGINI DELLA RETINA
Relatore: Ch.mo Prof. Alfredo RUGGERI
Correlatore: Ing. Enrico GRISAN
Laureando: Cristian TONIZZO
Anno Accademico 2001/2002
...a nonna Pasqualina
Indice
Sommario
5
Introduzione
7
1
Il fundus oculare
1.1
2
3
15
L’occhio umano . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
1.1.1
Struttura generale . . . . . . . . . . . . . . . . . . . . . . . . . 15
1.1.2
Retina . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
1.1.3
La vascolatura retinica . . . . . . . . . . . . . . . . . . . . . . 20
1.1.4
La fovea oculare . . . . . . . . . . . . . . . . . . . . . . . . . 21
1.1.5
Il disco ottico . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
1.1.6
La coroide . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
1.2
L’esame oftalmologico . . . . . . . . . . . . . . . . . . . . . . . . . . 21
1.3
Pricipali lesioni della retina . . . . . . . . . . . . . . . . . . . . . . . . 22
1.4
L’importanza dell’identificazione del disco ottico . . . . . . . . . . . . 23
Un modello geometrico della struttura vascolare retinica
25
2.1
Tecniche di determinazione del disco ottico . . . . . . . . . . . . . . . 25
2.2
Stato dell’arte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
2.3
Disposizione spaziale delle strutture vascolari . . . . . . . . . . . . . . 27
2.4
La funzione modello . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
2.5
Analisi dei parametri del modello . . . . . . . . . . . . . . . . . . . . . 32
2.5.1
I parametri xod e yod . . . . . . . . . . . . . . . . . . . . . . . 32
2.5.2
Parametro a . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
2.5.3
La funzione c x . . . . . . . . . . . . . . . . . . . . . . . . . 33
Aspetti applicativi e comportamento del modello
3.1
37
I dati sperimentali dello STARE . . . . . . . . . . . . . . . . . . . . . 37
3.2
3.3
I dati sperimentali dello Sparse Tracking . . . . . . . . . . . . . . . . . 41
Residui . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
3.4
Analisi del comportamento dei residui . . . . . . . . . . . . . . . . . . 45
3.4.1 Parametri xod yod . . . . . . . . . . . . . . . . . . . . . . . . . 45
3.4.2 Parametro a . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
3.4.3
Parametri c1 e c2 . . . . . . . . . . . . . . . . . . . . . . . . . 46
4 La stima parametrica mediante Simulated Annealing
49
4.1 Tecniche evolutive . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
4.2
4.3
4.4
4.5
Simulated Annealing . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
Addestramento del SA . . . . . . . . . . . . . . . . . . . . . . . . . . 53
Percorso di ricerca . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
4.4.1
4.4.2
Criterio di terminazione . . . . . . . . . . . . . . . . . . . . . 56
Temperatura iniziale . . . . . . . . . . . . . . . . . . . . . . . 56
4.4.3
4.4.4
4.4.5
Numero dati sperimentali . . . . . . . . . . . . . . . . . . . . . 58
Scelta dei punti di partenza . . . . . . . . . . . . . . . . . . . . 58
Scelta iniziale dei passi - Prima fase di ricerca . . . . . . . . . . 59
4.4.6
4.4.7
Ulteriori affinamenti - Seconda fase di ricerca . . . . . . . . . . 60
Range dei parametri . . . . . . . . . . . . . . . . . . . . . . . 60
Considerazoni sull’intero processo . . . . . . . . . . . . . . . . . . . . 60
5 Risultati
63
5.1 Risultai del SA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
5.2 Limiti del modello . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
6 Conclusioni
73
4
Sommario
La diffusione di immagini mediche acquisite elettronicamente ha notevolmente aumentato l’interesse del settore medico verso un’analisi di tipo automatico di tali dati. Ad
esempio in campo oftalmologico vi sono molti studi che mirano a realizzare strumenti
per un’analisi di tipo automatico del fondo oculare, per ottenere un sistema capace di:
estrarre e quantificare importanti parametri clinici,
diagnosticare patologie,
comparare immagini tra soggetti o nel tempo.
Il problema specifico qui affrontato è l’individuazione del disco ottico, caratteristica
saliente nelle immagini retiniche che può essere pensato come un buon punto di partenza per un’analisi dettagliata di altri parametri utili nella diagnosi clinica. Il lavoro svolto
in questa tesi riprende quello cominciato nel corso del 2002 [16] e basato sullo sviluppo
di un originale modello matematico atto a riprodurre le pricipali direzioni vascolari e
usando poi la relazione tra tali direzioni e il disco ottico per determinarne la posizione.
Partiremo descrivendo la struttura anatomica dell’occhio e delle patologie che ne
possono affliggere il funzionamento, con particolare riferimento a quelle del disco
ottico e a quelle che ne rendono difficile l’identificazione.
Introdurremo poi il modello matematico descrivendone le parti che lo compongono.
I risultati dell’analisi condotta sul modello sono stati velocemente ripresi dal lavoro [16]
e usati per studiare quello che si è dimostrato essere il problema piú delicato: sviluppare
un algoritmo capace di automatizzare la ricerca dei numerosi parametri del modello al
fine di ottenere il miglior fit tra il modello e i dati disponibili per l’indagine.
La scelta e ricaduta sull’uso di un algoritmo largamente usato per affrontare ricerce
di minima energia in sistemi multivariabili, il Simulated Annealing. Introdotto prima nella sua forma generale verrà poi adattato successivamente al nostro specifico
problema, procedura detta di addestramento.
Per valutare la validità di tale processo si è usato un set di ottantuno immagini
rese disponibili dal gruppo di sviluppo del progetto STARE, raggiungibile all’indirizzo
internet http://www.parl.clemson.edu/stare/nerve/
Tale gruppo è responsabile dello sviluppo di quello che, fino ad oggi, poteva essere
ritenuto il miglior processo automatico di ricerca del nervo ottico [22, 21, 25].
Alla fine del presente lavoro sarà infatti possibile trovare un dettagliato resoconto
delle superiori capacità riconoscitive del nostro processo automatico rispetto a quello
messo a punto dal gruppo dello STARE.
6
Introduzione
Controllo metabolico
Nelle sue varie forme, il diabete mellito colpisce il 2-5% della popolazione europea. In
particolare, il diabete mellito tipo 1, caratterizzato dalla assenza o, comunque, marcata
riduzione della secrezione insulinica endogena, rappresenta circa il 10% dei casi di
diabete, mentre il diabete tipo 2, caratterizzato da una variabile associazione di ridotta
secrezione pancreatica dell’ormone e resistenza periferica all’azione dell’insulina, rappresenta circa il 90% di tutti i casi di diabete.
Un’ indagine ISTAT eseguita in Italia negli anni 1987-1991 ha stimato in circa
2.000.000 il numero dei pazienti diabetici presenti nel nostro Paese (3%). A questa
quota deve poi essere aggiunto il numero delle persone che sono affette da diabete mellito senza saperlo (stimabile in oltre 1.000.000). Il costo sociale, diretto e indiretto del
diabete mellito è enorme: circa 20 miliardi di dollari per anno negli Stati Uniti. In alcuni paesi occidentali, quali il Regno Unito e la Francia, circa il 5% della spesa sanitaria
è destinato alla terapia del diabete e delle sue complicanze. In Italia stime recenti riportano una spesa annuale per cure e ricoveri correlati al diabete mellito pari a circa 9 mila
milioni di euro. Sebbene sia relativamente facile, con i mezzi terapeutici comunemente
usati (dieta, esercizio fisico, ipoglicemizzanti orali, insulina), mantenere la glicemia entro limiti tali da non causare alcun particolare sintomo, è tuttavia emerso con chiarezza
negli ultimi anni che anche livelli di iperglicemia modesta sono significativamente associati con lo sviluppo delle complicanze croniche (micro-e/o macroangiopatiche) della
malattia. Stime recenti riportano che, dopo 20-30 anni di malattia, circa il 70% dei
pazienti affetti da diabete mellito tipo 1 ha sviluppato un qualche grado di retinopatia
e che, dopo 10-15 anni, circa il 40% dei pazienti presenta nefropatia. La retinopatia
e la nefropatia diabetica rappresentano le principali cause, rispettivamente, di cecità e
uremia nei pazienti di età inferiore ai 50 anni.
La Retinopatia Diabetica
La retinopatia è la piú frequente e la piú recente fra le complicanze del diabete. Ma è
anche la piú facile da controllare: purchè lo screening inizi per tempo.
Fra le complicanze specifiche del diabete, la Retinopatia Diabetica (RD) è una delle
piú frequenti e tra le piú invalidanti. Nei paesi avanzati la RD è la prima causa di cecità
legale. Cecità e riduzione del visus sono gli effetti della retinopatia proliferante. Questa
fase avanzata della patologia si riscontra assai di rado in età pediatrica, almeno nei paesi
dove i pazienti hanno accesso a insulina e strumenti di autocontrollo della glicemia.
Ben diverso il discorso per le fasi iniziali della patologia che si possono manifestare già
a 5 anni dall’esordio e che a 15 anni dall’esordio hanno una incidenza media dell’80%.
Nonostante la evidence-based medicine confermi l’esistenza di un rapporto diretto fra
la durata della malattia e l’incidenza/durata della RD, l’epidemiologia rileva una fase
di immunità nell’età prepuberale. Bambini di 10 anni con alle spalle 8 piuttosto che
2 anni di diabete, hanno la stessa assai scarsa probabilità di sviluppare i segni della
RD. Parlare di immunità a dire il vero è sviante, in quanto analisi piú attente e svolte
su tempi piú lunghi hanno ritrovato sul medio termine un rapporto lineare fra durata
del diabete e incidenza/gravità della complicanza. Un Team Diabetologico Pediatrico,
ad esempio, avrebbe elevate probabilità di confrontarsi con casi di RD in fase iniziale
trattando pazienti in età post puberale.
Cosa significa confrontarsi ? La retinopatia non proliferante non ha indicazioni
farmacologiche nè chirurgiche. La sua evoluzione (e incidenza) non dipende da dislipidemie, obesità, dall’assunzione di ormoni, di alcol o di nicotina. Esiste una correlazione
con la pressione diastolica: i (rari) soggetti ipertesi in età pediatrica vanno riportati entro valori pressori di 135/80. L’ unica indicazione, forte, è l’ottimizzazione del controllo glicemico. A grandi linee si può dire che, se l’incidenza delle forme lievi di RD
dipende soprattutto dalla durata del diabete, la velocità dell’evoluzione verso forme
piú gravi è inversamente proporzionale alla compliance del paziente. In fase avanzata, quando la retinopatia sta divenendo o minaccia di diventare proliferante, si procede
con interventi di chirurgia laser. Nella fase precedente l’impegno specifico richiesto
si pone soprattutto in termini di prevenzione e controllo stretto dell’evoluzione. Nella grande maggioranza dei casi è perfettamente possibile controllare la complicanza
e mantenere una retinopatia lieve (o addirittura farla regredire) attraverso un ottimizzazione del controllo glicemico. Esistono però soggetti in cui la complicanza evolve in
maniera relativamente indipendente dalla qualità del compenso glicemico.
8
Epidemiologia della retinopatia diabetica
Nell’ambito delle complicanze del diabete la retinopatia si colloca al primo posto e
la sua prevalenza e severità sono strettamente correlate alla durata della malattia ed al
grado del controllo metabolico. In epoca pre-laser, dopo 40 anni di diabete mellito tipo
1, il 16% dei pazienti aveva un visus inferiore a 1/10 e un altro 14% necessitava della
lente di ingrandimento per leggere il giornale. Almeno il 30-50% dei pazienti affetti
da diabete mellito risulta affetto da un qualche grado di retinopatia diabetica che, a sua
volta, è ad alto rischio nel 10% dei casi. Ogni anno, negli USA, circa 250.000 diabetici
sviluppano retinopatia ad alto rischio. Si può ragionevolmente affermare quindi che da
30.000 a 50.000 diabetici italiani/anno si trovano nelle stesse condizioni. In Italia risulta che la retinopatia sia la seconda causa di cecità nella popolazione generale, preceduta
dalla cataratta e seguita dalla miopia. Se l’analisi viene limitata all’intervallo di età 2070 anni la retinopatia rappresenta la prima causa di cecità. Circa il 13% dei casi di
cecità legalmente riconosciuta sono da attribuirsi a retinopatia diabetica. La retinopatia
è rara nei primi 2-3 anni dalla diagnosi nei pazienti con diabete tipo 1, mentre nei pazienti con diabete tipo 2, una proporzione consistente (fino al 30%) presenta retinopatia
già al momento della diagnosi. Questo fatto è legato alla presenza, in quest’ultimi,
di iperglicemia già molto tempo prima della diagnosi. Una grande quantità di studi
ha ormai dimostrato in maniera inconfutabile il fondamentale ruolo eziopatogenetico della iperglicemia cronica nello sviluppo e nella progressione delle complicanze
croniche nei pazienti affetti da diabete mellito. Da ciò consegue che il mantenimento
della glicemia ad un livello il piú possibile prossimo ai valori di normalità, fin dall’esordio del diabete, è condizione insostituibile per prevenire la comparsa e la progressione
delle complicanze micro e macroangiopatiche.
Storia naturale della retinopatia diabetica
La storia naturale della retinopatia diabetica passa attraverso 5 fondamentali eventi
patologici:
1. formazione di microaneurismi
2. aumentata permeabilità vascolare
3. occlusione vascolare
9
4. formazione di neovasi e proliferazione di tessuto fibroso sulla superficie della
retina e del disco ottico
5. retrazione del tessuto fibroso e del vitreo
Alla base della retinopatia diabetica si riscontra un diffuso danno dei capillari retinici,
a carico dei quali si può riscontrare ispessimento della membrana basale dell’endotelio,
deposizione di materiale ialino e sclerosi della parete con perdite di periciti in numerosi
tratti dei capillari. L’occlusione vascolare e l’aumentata permeabilità vascolare vengono ritenute le principali vie patogenetiche delle alterazioni retiniche. Le occlusioni
vascolari causano aree di non perfusione retinica e dilatazioni focali e generalizzate
dei vasi ancora pervi. Le dilatazioni focali assumono l’aspetto di microaneurismi, che
spesso circondano le aree di non perfusione. I vasi dilatati sono fragili e permeabili
alle molecole circolanti facilitando così la formazione di emorragie e la fuoriuscita di
lipidi e colesterolo fra le fibre nervose della retina, con formazione di essudati duri, a
margini netti, di color giallo-brillante, mentre in corrispondenza delle aree ischemiche
e delle zone infartuali si producono lesioni dall’aspetto cotonoso, bianco-grigiastre e
a margini sfumati: i cosiddetti "cotton wools". Queste lesioni configurano il quadro
della retinopatia background o non proliferante. Quando emorragie retiniche multiple si associano a lesioni cotonose ed irregolarità del decorso venoso con dilatazioni
segmentarie e formazione di anse (venous beadings e loops) siamo di fronte ad una
retinopatia pre-proliferante. Nelle fasi piú evolute della malattia l’ischemia ingravescente è responsabile di una eccessiva risposta neovascolare con formazione di capillari a partenza dai vasi venosi della papilla o dalla retina periferica, neovasi che essendo
molto fragili tendono a sanguinare facilmente, dando luogo ad emorragie preretiniche.
I neovasi e le emorragie sono seguiti dallo sviluppo di tralci fibrosi, che per effetto della
trazione esercitata sulla retina ne possono causare il distacco, portando cosí alla perdita
permanente del visus.
La retinopatia diabetica viene clinicamente distinta in due stadi:
Retinopatia non proliferante (lieve, moderata o severa);
Retinopatia proliferante.
In aggiunta, l’edema maculare può essere presente in ognuno di questi stadi. Il primo stadio (Retinopatia diabetica non proliferante) può a sua volta essere distinto in 3
sottogruppi:
a) Lieve;
10
b) Moderato;
c) Severo.
Una accurata stadiazione della forma non proliferante è estremamente importante
poichè la progressione verso la forma proliferante è strettamente correlata con il grado
di severità del quadro non proliferante.
Il secondo stadio (Retinopatia diabetica proliferante) è definito dalla comparsa di
neovasi della retina e/o del disco ottico, da proliferazioni fibrovascolari ed emorragie
vitreali. Una cosa molto importante da tenere presente è che lesioni a carico della retina
possono essere presenti senza che venga causato alcun disturbo visivo. Alterazioni
della vista si manifestano solo quando viene interessata la macula (sede appunto della
visione distinta). Ecco perché è importante che un soggetto affetto da diabete mellito
si sottoponga a regolari controlli del fondo oculare.
Con quali strumenti può essere valutato il fondo oculare?
A) L’oftalmoscopia diretta consente una buona valutazione del fondo oculare, anche
se tale metodica non consente la valutazione della parte piú periferica della retina.
B) La fotografia del fondo oculare (retinografia) consente di avere, per ogni paziente,
una documentazione delle immagini retiniche; in tal modo è possibile confrontare le
immagini tra loro e valutare l’effetto di un eventuale trattamento.
C) L’oftalmoscopia binoculare indiretta consente di esplorare il 100% della superficie retinica e individuare le zone che necessitano di una piú approfondita valutazione.
D) La fluorangiografia retinica, eseguita mediante iniezione endovenosa di fluoresceina sodica e fotografie sequenziali del fondo oculare, consente di valutare eventuali
alterazioni morfo-funzionali dei vasi retinici.
Come si cura la retinopatia diabetica? Come per ogni malattia, in principal modo se
è cronica come il diabete, la miglior cura è rappresentata dalla prevenzione. Il paziente
con diabete mellito deve eseguire uno scrupoloso automonitoraggio della glicemia mediante sticks adattando in tal modo la terapia in atto (dieta, ipoglicemizzanti orali, insulina) ed eseguire regolari controlli presso un Servizio di Diabetologia in modo da
mantenere un buon controllo glicemico, con valori di emoglobina glicosilata (HbA1c)
prossimi ai valori di normalità. Allo stesso modo deve tenere sotto stretto controllo tutti
quei fattori che potrebbero contribuire a peggiorare la situazione retinica (ipertensione
arteriosa, fumo di sigaretta, dislipidemie).
Nel momento in cui la retinopatia diabetica si è sviluppata ed ha raggiunto un grado
tale da richiedere un intervento terapeutico mirato, la laser-terapia è l’unico presidio
(soprattutto se eseguito precocemente) in grado di rallentarne o prevenirne la progres11
sione. Il laser è un dispositivo in grado di emettere un raggio di luce (verde, rosso,
infrarosso) che, diretto sulle lesioni retiniche che vogliamo trattare, mediante effetto
termico, le coagula e chiude. La Fotocoagulazione può essere focale: in questo caso spot di vari micron di diametro vengono indirizzati verso le zone che all’esame
fluorangiografico appaiono essere le responsabili della diffusione del colorante. La Fotocoagulazione può essere a griglia: in questo caso l’area da trattare è estesa e per
questo motivo il trattamento viene condotto mediante spot non confluenti disposti a
griglia. Non dobbiamo dimenticare che il trattamento laser nel caso venga condotto in
presenza di retinopatia proliferante consente di combattere i fattori responsabili della
neo-angiogenesi. La fotocoagulazione può essere poi estesa a tutta la retina (fotocoagulazione panretinica). Nei casi in cui la retinopatia sia particolarmente evoluta, le emorragie abbiano interessato il Vitreo e i processi fibro-proliferativi determinino trazioni
sul piano retinico, può essere preso in considerazione l’intervento di vitrectomia.
Evoluzione
Sottoporsi ogni anno a una retinografia può ridurre fino al 90% i casi di cecità o di
deficit gravi del visus.
In fase iniziale la retinopatia diabetica si manifesta a un esame del fondo oculare
attraverso poche microemorragie o microaneurismi dei capillari che prendono la forma
di puntini rossi del diametro medio di 100 micron. Il numero di microemorragie o
microaneurismi cresce progressivamente. In una seconda fase è possibile riscontrare
nella retina delle macchie biancastre: sono essudati duri, depositi di lipoproteine che
attraversano le pareti iperpermeabili dei capillari e si depositano sulla retina. Nella
terza fase si trovano noduli, detti per il loro aspetto, cotonosi derivati da microinfarti
ischemici. Siamo nella fase moderata della retinopatia non proliferante. A questo punto
è probabile una evoluzione verso la retinoparia proliferante sulla quale si interviene
soprattutto con interventi laser.
Le Linee Guida dell’ISPAD1 e della SIEDP2 prevedono un esame del fondo oculare
all’esordio (nel DM1 è rarissimo riscontrare dei problemi, ma un esame è comunque
utile per avere un punto di partenza), dopo 5 anni dall’esordio e comunque a 13 anni.
Dai 13 anni in poi gli esami del fondo oculare devono essere condotti ogni anno, indipendentemente dal loro risultato. I casi di RD rilevata possono essere controllati a
1
International Society of Pediatric and Adolescent Diabetes.
Italiana di Endocrinologia e Diabetologia Pediatrica.
2 Società
12
intervalli piú ravvicinati. Abbiamo parlato di esame del fondo oculare, ma sarebbe più
desiderabile parlare di retinografia. Un buon oculista può rilevare i segni di una RD con
un semplice oftalmoscopio, ma disporre di un documento fotografico realizzato con un
apparecchio tradizionale o con uno digitale consente di lavorare su documenti obiettivi
e permette di utilizzare al meglio il tempo e le competenze del medico oculista che
analizza le retinografie effettuate da terzi. Studi condotti su una popolazione diabetica
indifferenziata (e quindi in grande maggioranza DM2) hanno dimostrato come sottoporsi ogni anno a un controllo del fondo dell’occhio possa far diminuire del 90% i casi
di cecità o di riduzioni gravi del visus. La popolazione DM1 è sicuramente piú informata e motivata, ma in assenza di riscontri negativi, la visita oculistica potrebbe inserirsi
nel generale calo della compliance che si riscontra spesso in età adolescenziale.
Tecniche correttive
Prima di effettuare ogni tipo di trattamento correttivo occorre effettuare una serie di esami fondamentali per poter escludere patologie misconosciute o anomalie difficilmente
diagnosticabili con i comuni esami oculistici. Ogni azione correttiva, di qualunque
natura essa sia, dovrebbe essere intrapresa solo dopo un’analisi attenta ed approfondita
con i seguenti esami:
esame del visus naturale, corretto ed in cicloplegia (importante per eliminare
l’accomodazione e quindi eventuali errori di calcolo nell’impostazione del programma operatorio)
esame del segmento anteriore (palpebra, congiuntiva, cornea) con esame del
film lacrimale (lo strato liquido che protegge l’occhio dall’ambiente esterno) per
escludere infezioni in corso.
la pressione oculare
la misurazione dello spessore corneale (pachimetria)
l’esame del fondo dell’occhio
l’ecobiometria (la misurazione della lunghezza del bulbo oculare)
la topografia corneale computerizzata (l’esame computerizzato della superficie
anteriore della cornea)
13
la scheimpflug camera (esame molto importante e sofisticato dello spessore e
delle irregolarità della superficie corneale mediante differenti angolazioni)
la cheratometria (misurazione dei raggi di curvatura della cornea).
L’esame del fondo dell’occhio è dunque importante sia se interpretato come step di un
più completo processo che come analisi a se stante.
14
Capitolo 1
Il fundus oculare
L’occhio è composto da un gran numero di strutture eterogenee che possono essere ben
distinte tra loro: in questo capitolo si espongono alcune nozioni di tipo anatomico e
fisiologico relative al fundus oculare (la porzione posteriore dell’occhio) ed alle parti
che lo compongono al fine di rendere piú chiara la trattazione dei capitoli successivi.
1.1 L’occhio umano
1.1.1 Struttura generale
La struttura dell’occhio umano ripete essenzialmente quella di tutti i vertebrati (fig.1.1).
Ha forma quasi sferica: il suo asse, cioè il suo diametro antero-posteriore, ha quasi
la medesima lunghezza del diametro orizzontale e del verticale, 25 mm circa.
La cornea ha una curvatura un po’ maggiore della sclerotica, alla quale si raccorda senza che si stabilisca un angolo vivo. La sclerotica è di connettivo denso, senza
rinforzi cartilaginei ed ossei. La corioidea, ricca di pigmento e di vasi, interna alla sclerotica, si differenzia anteriormente nel corpo cigliare, con una porzione esterna ricca
di elementi muscolari, e una piú interna che costituisce i processi cigliari , riccchi di
vasi e importanti per il ricambio dell’umor acqueo; e si prolunga nell’iride, alla formazione della quale concorre, nella sua faccia interna, anche la retina che, perduta
la funzione e la struttura nervosa a livello dell’ora serrata, si continua in avanti come
pars ciliaris, e poi iridea retinae. Nello spessore dell’iride numerose cellule muscolari
costituiscono la muscolatura costrittrice e dilatatrice della pupilla, a elementi rispettivamente a disposizione anulare e radiale. La retina è spessa circa un terzo di millimetro,
ed è congiunta mediante il nervo ottico all’encefalo, di cui è un’emanazione. Presenta
16
Il fundus oculare
Figura 1.1: occhio umano
un’evidente stratificazione, e prima di tutto dobbiamo distinguere, fin dal momento in
cui la vescicola ottica si trasforma in una coppa a parete doppia, una lamina esterna,
lo "strato dell’epitelio pigmentoso", e una retina propriamente detta, a funzione visiva,
almeno fino all’ora serrata, e nella quale si possono distinguere uleriormente sette strati
(fig.1.2).
Troviamo infatti successivamente, dall’esterno verso l’interno, cioè dallo strato
dell’epitelio pigmentoso al vitreo:
1. lo strato dei coni e dei bastoncelli (fig.1.3), cioè delle porzioni di stali delle cellule
sensoriali; essi immergono il loro estremo nella retina esterna ricca di pigmento
che li isola gli uni dagli altri;
2. lo strato dei granuli esterni, rappresentato dai corpi cellulari dei coni e dei bastoncelli, con i loro nuclei;
3. lo strato plessiforme esterno, dove i tratti basali delle cellule sensoriali sinaptano
con i dendriti delle cellule bipolari;
4. lo strato dei granuli interni,formato dai corpi dei neuroni bipolari;
1.1 L’occhio umano
17
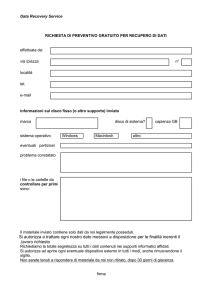
Figura 1.2: la retina umana: dall’alto in basso, coni e bastoncelli; loro nuclei o strato
dei granuli interni (n.s.); strato plessiforme esterno (s.p.e.); strato dei neuroni bipolari o
dei granuli interni (n.b.); strato plessiforme interno (s.p.i.); strato delle cellule gangliari
(n.g.); strato delle fibre ottiche (f.o.);cellule orizzontali e emacrine in corrispondenza di
s.p.e. e s.p.i
5. lo strato plessiforme interno, formato dai neuriti dei neuroni bipolari e dai dendriti delle cellule gangliari;
6. lo strato delle cellule gangliari;
7. lo strato delle fibre nervose, formato dai neuriti delle cellule gangliari, inizio del
nervo ottico.
Accenneremo appena ad atri elementi retinici: nello strato plessiforme esterno le "cellule orizzontali" i cui processi contattatano coi terminali dei coni e dei bastoncelli e
con le cellule orizzontali contigue, a dare un’integrazione orizzontale dei fotorecettori;
nello strato plessiforme interno le "cellule amacrine" sono connesse con i neuriti delle
bipolari e tra loro, a dare un’altra integrazione orizzontale; infine le cellule del Muller,
elementi gliali di sostegno, attraversano la retina quasi a tutto spessore. Coni e bastoncelli sono diffusi in tutta la coppa retinica, fino all’ora serrata. I bastocelli sono
specializzati per la visione in condizione di luce tenue mentre i coni per la visione con
18
Il fundus oculare
Figura 1.3: coni e bastocelli
luce brillante. Nella retina umana vi sono tre tipi differenti di coni, ciascuno dei quali
è sensibile al blu, al verde o al rosso. I bastoncelli hanno prevalenza numerica nella
regione extramaculare; ma avvicinandosi alla "macula lutea", i coni si fanno piú numerosi, e nella macula stessa sono in assoluta prevalenza, per diventare esclusivi nella
fovea, cioè in quel punto della retina incluso nella macula dove l’acuità visiva è massima, e dove i coni si stipano, facendosi piú lunghi e sottili. Il cristallino dell’occhio
umano ha la forma di lente biconvessa, con minore curvatura nella sua faccia anteriore:
ha un diametro equatoriale di circa 8 mm, asse anteroposteriore di 5 mm. Trasparentissimo, con indice di rifrazione elevato (1,4 ca.), è tenuto a posto dalla zonula dello Zinn,
detta anche ligamento cigliare, disposto intorno al suo equatore e formato da fibre che
si ritengono derivate dall’epitelio della pars iridea retinae, e che si inseriscono da una
parte alla capsula del cristallino, dall’altra ai processi cigliari. Quando la muscolatura
cigliare è in riposo, la zonula è tesa, e il cristallino subisce una certa trazione periferica,
per cui presenta un minimo di curvatura: ma quando il muscolo cigliare si contrae, il
ligamento si rilascia, e il cristallino rigonfia, aumentando la curvatura delle sue superfici. E’ questo il meccanismo dell’accomodamento per deformazione del cristallino in
seguito al giuco dei muscoli cigliari. L’umore acqueo riempie lo spazio anteriore del
bulbo, tra la cornea e il cristallino, cioè l’ampia camera anteriore e la piccola camera
posteriore, tali rispetto all’iride. L’ampio spazio del bulbo oculare posteriore al cristallino è riempito dal vitreo, trasparentissimo e non vascolarizzato. Gli occhi si trovano in
posizione frontale: i piani equatoriali dei due globi oculari quasi coincidono, e gli assi
anteroposteriori dei due occhi formano un angolo di appena 10 gradi. La rotazione del
1.1 L’occhio umano
19
Figura 1.4: impatto della luce sulla zona della Fovea
globo oculare è ottenuta dal gioco di sei muscoli estrinseci, quattro retti e due obliqui.
I globi oculari sono protetti da due pliche cutanee, la palpebra superiore e l’inferiore,
fornite di una muscolatura che ne assicura la mobilità. La plica semilunare rappresenta
il ridimento di una terza palpebra, la membrana nittitante.
1.1.2 Retina
La retina umana, come quella degli altri mammiferi, è una struttura complessa pluristratificata. Nella retina di quasi tutti i vertebrati si riconosce un’area nella quale le
cellule sensitive sono piú numerose e stipate; area che in anatomia umana prende il
nome di macula lutea. Nell’area si può differenziare una regione focale, la fovea, dove
gli elementi sensoriali sono ancora piú fitti.
L’area e particolarmente la fovea è la regione della retina dove la visione è piú acuta
(fig.1.4). La retina di tutti i vertebrati possiede coni e bastoncelli. Questi due tipi di
cellule sensoriali portano dei pigmenti che assorbono la radiazione luminosa, la quale
rappresenta lo stimolo per l’inizio di un impulso nervoso. Lo stimolo elettrico viene
generato attraverso una reazione chimica a livello dei fotorecettori, trasferito quindi alle
cellule bipolari e successivamente alle cellule gangliari.
Il pigmento dei bastoncelli è rappresentato dalla cosiddetta porpora retinica che
20
Il fundus oculare
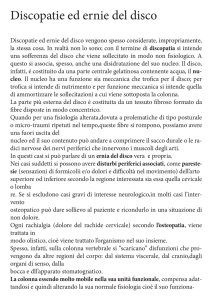
Figura 1.5: vascolatura retinica: sono visibili il disco ottico sulla destra e la fovea al
centro
imbianca alla luce e si rigenera all’oscurità; perciò un occhio adatto alla poca luce ha
una retina più ricca di porpora.
1.1.3 La vascolatura retinica
All’irrorazione della membrana retinica provvede l’arteria centrale della retina, dell’arteria oftalmica che penetra nel nervo ottico, ne percorre l’asse ed entra nel bulbo oculare
al centro della papilla ottica. Da qui l’arteria retinica centrale si divide in piú rami che
si distribuiscono sulla superficie ed in profondità con una fitta rete che vascolarizza
gran parte della retina stessa. Dalla rete capillare si originano i vasi venosi; questi
confluiscono nella vena centrale retinica che fuoriesce dal bulbo oculare attraverso la
papilla.
1.2 L’esame oftalmologico
21
1.1.4 La fovea oculare
La fovea è una depressione della macula lutea in cui è massima la densità di coni. In
virtú di questo motivo la fovea è la regione retinica con la piú elevata acuità visiva;
di conseguenza è in questa zona che il punto di fissazione viene messo a fuoco. In
condizioni non patologiche la fovea può essere distinta dal fondo libero della retina per
il suo colore piú scuro rispetto alla zona circostante e per la pressochè totale assenza
sia di vasi sanguigni che di assoni di cellule nervose.
1.1.5 Il disco ottico
Visivamente il disco ottico è una delle strutture piú facilmente riconoscibili (con ovvie
limitazioni nel caso di patologie che ne celeno la forma). Tale zona raccoglie tutta la
vascolatura che irrora gli starti interni della retina e le fibre nervose.
Gli assoni delle cellule gangliari dopo aver attraversato la retina , entrano nel nervo
ottico a livello del disco ottico (anche detto papilla ottica). Di norma il disco ottico
presenta una lieve depressione centrale e qualunque variazione dell’aspetto di quest’ultima può rivestire notevole significato clinico: ad esempio , la depressione può essere
aumentata a causa della perdita di assoni delle cellule gangliari o può protrudere nello
spazio vitreo insieme con tutto il disco ottico, a causa di un edema (edema papillare)
dovuto ad un aumento della pressione intracranica.
1.1.6 La coroide
La coroide è lo strato vascolare interposto tra retina e sclera. E’ una zona ampiamente
vascolarizzata da vasi appartenenti alle arterie ciliari.
1.2 L’esame oftalmologico
L’esame oftalmologico viene compiuto sulla visualizzazione del fundus oculare.
L’oftalmoscopia del fondo dell’occhio serve in diagnostica non solo a determinare
eventuali affezzioni dell’occhio, ma anche e soprattutto a stabilire la diagnosi precoce
in materia di diabete, sifilide, leucemia, nefrite, tumori cerebrali e altre malattie, cioè
in base ai rapporti anatomico-funzionali intercorrenti tra occhio e tutti gli altri organi
del corpo umano.
Questo tipo di esame si esegue con vari apparecchi, il piú semplice dei quali è
l’oftlmoscopio elettrico, che può essere anche di dimensioni tascabili.
22
Il fundus oculare
Questo apparecchio, impugnato dall’osservatore e portato sull’occhio del paziente,
emette un fascio di luce che, entrando nell’occhio attraverso la pupilla, raggiunge la
retina illuminando tutto il fondo oculare.
L’apparecchio permette di osservare un’area della superficie retinica comprendente
la papilla ottica con le arteriole e le venule di maggior calibro ed i territori circostanti, il
polo posteriore con l’area centrale ( la "macula" nel linguaggio corrente degli oculisti).
L’ingrandimento delle immagini è di circa 15 volte.
1.3 Pricipali lesioni della retina
Vengono qui di seguito descritte le principali lesioni della retina per le quali risulti
importante l’identificazione del disco ottico o che al contrario, se presenti, comportino
una difficoltà nella determinazione del disco, che ricordiamo può essere considerato un
buon punto di partenza per una descrizione piú dettagliata dell’intero fundus oculare.
Il restringimento arteriolare generalizzato (Generalized Arteriolar Narrowing
- GAN): La prima risposta all’aumento della pressione endoluminale è rappresentata dalla contrazione della parete muscolare delle arteriole retiniche. Questo
produce una diminuzione generale del calibro delle arterie, visibile sia sull’arteria centrale della retina, che lungo le sue diramazioni. Nelle prime fasi della
retinopatia questo restringimento può essere reversibile. Il restringimento viene
valutato attraverso una modificazione del rapporto fra il calibro delle arterie e
quello delle vene (normalmente pari a 2/3).
I noduli cotonosi: hanno un aspetto fioccoso e biancastro, a bordi irregolari sfumati. Nella retinopatia ipertensiva di solito sono riscontrabili al polo posteriore e
lungo le principali arcate vascolari. Sono lesioni che possono presentarsi anche in
presenza di altre patologie, prima fra tutte il diabete. Senza entrare nel dettaglio,
sono dovuti a sbalzi pressori che portano a blocchi del flusso assoplasmatico nelle
fibre nervose superficiali della retina.
Emorragie ed Essudati: La compromissione della barriera emato-retinica determina una diffusione di liquido plasmatico sul tessuto retinico. La persistenza di
un’abnorme quantità di fluidi di origine plasmatica può avere come conseguenza la precipitazione di proteine e lipidi che sono i componenti principali degli
essudati duri.
1.4 L’importanza dell’identificazione del disco ottico
23
Microaneurismi e macroaneurismi: I microaneurismi rappresentano una lesione specifica della rete capillare retinica. Possono disporsi ai margini di noduli
cotonosi o in qualche altra parte della retina. La loro evoluzione è varia. Sono ben
evidenziati con la fluoroangiografia retinica. I macroaneurismi, a differenza dei
microaneurismi, sono caratteristici di una ipertensione di lunga durata in soggetti
anziani. Si presentano come dilatazioni sacculari in corrispondenza di arteriole
dei primi tre ordini di ramificazione, a volte isolate, raramente numerose.
L’edema papillare: è un aspetto caratteristico della cosiddetta ipertensione arteriosa maligna. Il disco ottico appare rigonfio, soprattutto dal lato nasale e circondato da microaneurismi, emorragie a fiamma. I danni prodotti dall’ipertensione arteriosa sono dunque dipendenti dal livello della pressione sanguigna e
dalla durata dello stato ipertensivo.
1.4 L’importanza dell’identificazione del disco ottico
Accenneremo velocemente all’importanza che ha l’identificazione del disco ottico su
immagini retiniche.
Misura di riferimento: La vena uscente dal disco ottico è presa come riferimento per le misure su immagini retiniche in quanto si assume che anatomicamente
sia praticamente costante. Per determinare in modo automatico questa vena è
necessario determinare in modo automatico la posizione del disco. Quest’ultima
osservazione sarà chiarita meglio piú avanti durante la trattazione del modello
matematico.
Lo studio del ristringimento arteriolare generalizzato: (Generalized Arteriolar Narrowing - GAN). Prevede l’analisi di vene e arterie in una corona circolare
attorno al disco ottico. La composizione dei calibri di arterie e vene in questa
corona permette di stimare il CRAE (central retinal artery equivalent) e CRVE
(central retinal vein equivalent), corrispondenti a stime del calibro della arteria e vene centrali rispettivamente. Il rapporto tra questi determina il livello di
restringimento.
Mappatura retinica: Il posizionamento del disco ottico è un primo passo verso
la completa mappatura delle zone della retina, al fine di determinarne i livelli di
criticità per zone patologiche. Difatti la posizione del disco ottico consente di
24
Il fundus oculare
determinare in prima approssimazione la zona maculare, sulla quale la presenza
di zone patologiche determina situazioni di particolare rischio per la capacità
visiva.
Studio del glaucoma: Lo studio del glaucoma prevede un’analisi della forma
del disco ottico. Appare dunque evidente come tale indagine richieda preliminar
mente l’identificazione approssimativa del centro del disco.
La registrazione di immagini: La registrazione di immagini della retina può
essere in prima approssimazione ottenuta tramite la determinazione automatica
della posizione del disco ottico. Infatti per poter confrontare la differenza tra due
diverse immagini retiniche (ad esmpio ottenute a visite successive) è necessario
avere un punto a cui riferirsi in entrambe, e qui entra nuovamente in gioco la
posizione del disco che è ottimo candidato ad essere tale riferimento.
Errata identificazione delle patologie: Poichè la zona del disco ottico potrebbe
apparire ad un sistema automatico di analisi di immagini retiniche come una
zona di elevata irregolarità cromatica e luminosa, e potrebbe essere classificata
come zona patologica ( in alcune situazioni di riflettività il disco ottico può essere
confuso per un Nodulo Cotonoso (cotton wool spot) è necessario determinare,
sulla base della convergenza dei vasi, la collocazione del disco ottico per poterlo
escludere da ogni estrazione di aree patologiche.
Capitolo 2
Un modello geometrico della struttura
vascolare retinica
Considerazioni morfologiche dell’occhio umano e soprattutto considerazioni sulla prospettiva di visione di un oftalmoscopio ci hanno suggerito la formulazione di un originale modello matematico. Tale modello, definito su tutto il piano x y , restituisce la
stima della tangente a un vaso alle coordinate x y . Tale direzione, fornita dal modello,
viene successivamente confrontata con la direzione misurata, estratta da un algoritmo
che associa ad ogni punto appartenente a un vaso la relativa direzione.
A questo punto il problema di partenza si traduce in un problema di minimizzazione
di una funzione costo, ottenuta come somma delle differenze tra modello matematico e
direzioni estratte (residui).
2.1 Tecniche di determinazione del disco ottico
Alcune tecniche utilizzate si basano su legami tra proprietà cromatiche o morfologiche
direttamente riferite al disco ottico. Si usano cioè caratteristiche proprie del disco quali
colore, luminosità, forma in modo diretto o attraverso la valutazione di differenze di tali
parametri rispetto al resto dell’immagine. Questo modo di afforntare il problema, sulla
base della letteratura consultata [31, 33, 45, 47], non è da ritenersi quello a massima
resa. Gli algoritmi di ricerca automatica basati su tali strategie risolvono il problema
solo con una bassa percentuale di successo (inferiore al 63%). Patologie della retina
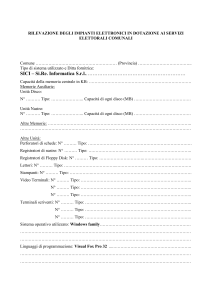
(alcuni esempi in fig.2.1) possono mutare forma e colore del disco ottico e dunque
non permettono di applicare su tali caratteristiche un’indagine discriminatoria. Altresí
risulta complicata una forma di confronto tra metodologie diverse. Il confronto tra
26
Un modello geometrico della struttura vascolare retinica
Figura 2.1: alcune problematiche legate all’uso delle sole caratteristiche morfologiche
e cromatiche del disco ottico
tecniche diverse si potrebbe ritenere valido solo se applicato sullo stesso data set di
immagini. Considerata dunque la bassa percentuale di successi legata a tali strategie e
la necessità di poter ottenere un confronto valido abbiamo deciso di usare una seconda
tipologia di indagine.
2.2 Stato dell’arte
A questa seconda classe appartengono tutti quegli algoritmi che legano la posizione
relativa del disco ottico a quella delle strutture vascolari visibili. A questa classe appartiene il lavoro svolto dal gruppo di ricerca denominato STARE (Structured Analysis
of the Retina [23]). Lo STARE è in realtà un ben piú ampio progetto e si pone come
obiettivo non solo la localizzazione del disco ottico ma anche la piú completa raccol-
2.3 Disposizione spaziale delle strutture vascolari
27
ta di informazioni relative ad immagini del fundus oculare. Senza addentrarci troppo
nella metodologia usata (la documentazione è scaricabile dall’indirizzo web del gruppo STARE) possiamo dire che l’algoritmo utilizzato dallo STARE è basato sull’applicazione di segmenti fuzzy [25, 22] sullo scheletro vascolare ed è da ritenersi il miglior
tentativo di automatizzare la ricerca della posizione del disco ottico. Come accennato
sopra, sarebbe opportuno disporre di uno stesso data set di immagini retiniche su cui
valutare i risultati di diversi sistemi e poterli mettere in competizione. Anche per questa
seconda ragione abbiamo deciso di usare il database di imamgini retiniche originali (e
dell’estrazione vascolare) messoci gentilmente a disposizione direttamente dal gruppo
dello STARE. Esso comprende in totale 81 immagini retiniche piú altre 81 ottenute
dall’applicazione dell’algoritmo di tracking vascolare, sempre realizzato dello STARE,
per l’estrazione delle strutture vascolari, rappresentate come immagine binaria (b/n)
della stessa dimensione dell’originale.
Pur potendo contare su un algoritmo di Vessels Tracking messo a punto all’Università di Padova[14], abbiamo condotto l’indagine su quelle pre-elaborate dallo STARE.
Le immagini, tutte in formato ppm, con campo di vista di 35 e dimensione di 700x605
punti sono disponibili all’indirizzzo internet http://www.clemson.edu/stare/ e rappresentano un buon data set di immagini retiniche, differenziato per posizioni del disco,
qualità dell’immagine, variabilità cromatica e visibilità piú o meno netta del disco e dei
vasi. Il data set contiene 30 immagini retiniche di soggetti normali e 51 di soggetti patologici, con diverse lesioni, quali: tortuosità dei vasi o della vascolarizzazione corioidea,
emorragie che oscurano completamente la zona del nervo ottico. In questo data set la
percentuale di successo del metodo usato dallo STARE raggiunge il brillante risultato
di 89% di decisioni corrette.
2.3 Disposizione spaziale delle strutture vascolari
Dall’analisi di un’immagine retinica, si può notare come la maggior parte delle strutture
vascolari presenti abbiano un andamento che può essere approssimato con due parabole
contrapposte, con i rispettivi vertici coincidenti esattamente all’interno del disco ottico.
Il perché di tale orientamento lo si può ricercare da osservazioni di natura anatomicogeometrica. La vascolatura visibile sulla superficie della retina è quella che, arrivando
dal punto in cui il nervo ottico affiora, si dirama avvolgendo il globo. Essendo la parete
retinica di forma sferica e immaginando uno sviluppo a raggiera dei vasi è logico attendersi che la prioezione di tali vasi sul piano bidimensionele (quello che per intendersi
28
Un modello geometrico della struttura vascolare retinica
550
500
450
400
350
300
250
200
150
100
50
0
100
200
300
400
500
600
700
Figura 2.2: luogo Γ
vede l’oftalmoscopio) siano rappresentati approssimativamente da parabole. Essendo il
disco ottico il punto di partenza dei vasi, si ha che le parabole hanno i vertici contenuti
all’interno del disco ottico1 .
Sulla base di queste osservazioni, si assume che le maggiori strutture vascolari
visibili in un’immagine retinica si sviluppino lungo il luogo geometrico parabolico Γ
(fig.2.2) individuato da:
Γ x y : ay2 x (2.1)
e che il disco ottico sia il punto in cui i vertici delle parabole coincidano. Il valore
del parametro a indica l’apertura delle parabole che compongono il luogo Γ. Per determinare la posizione del disco ottico è necessario trovare il luogo Γ (fig.2.3) che meglio
descrive il comportamento delle strutture vascolari.
2.4 La funzione modello
Si definisce, quindi, una funzione che, partendo dalle coordinate cartesiane x y di
ogni punto appartenente alla struttura vascolare visualizzata, fornisca la direzione del
1 Quello che in realtà si cercherà di localizzare è il punto di partenza delle diramazioni del nervo ottico
sulle pareti della retina, dunque non il centro geometrico esatto del disco. Non sempre, infatti, il centro
del disco ottico coincide con il punto di diramazione.
2.4 La funzione modello
29
Figura 2.3: luogo Γ sovrapposto all’immagine originale
vaso in quel punto. Avendo ipotizzato che le maggiori strutture vascolari assumano
un andamento parabolico del tipo descritto dalla (2.1), si impone che i punti dei vasi
appartenenti al luogo Γ abbiano una direzione tangente al luogo stesso. In altre parole
nei punti delle strutture vascolari x y Γ il modello deve esprimere una direzione che
abbia la tangente data dall’equazione:
1
t sgn y sgn x 2a x
(2.2)
a
cioè della derivata della curva che descrive Γ.
Volendo ora parametrizzare il luogo sopra descritto rispetto alle coordinate del
centro del disco ottico xod yod , si possono definire le nuove coordinate x e y come:
x x xod
y y yod
(2.3)
con le quali si possono riscrivere la (2.1) e (2.2).
Ovviamente non tutti i punti delle strutture vascolari visualizzate nell’immagine
30
Un modello geometrico della struttura vascolare retinica
450
400
350
300
250
200
150
200
250
300
350
400
450
500
550
Figura 2.4: luogo Γ e direzioni fornite dal modello per i punti che non vi appartengono
retinica appartengono al luogo Γ. Per fare in modo che il modello tenga conto del
contributo di questi punti, si è scelto di associare per ogni x y Γ una direzione
modulata dalla distanza del punto dalla curva parabolica piú vicina (fig.2.6).
Si è definita, quindi, la funzione modulatrice:
d x y a c x y sgn y c x x
a
(2.4)
Al denominatore compare la funzione c x c x c1
c2
1 e x
1 ex (2.5)
con c1 0 e c2 0 il cui andamento è rappresentato in figura 2.5.
La scelta di utilizzare questa funzione si basa sulla considerazione che è una funzione continua e che assume rapidamente i valori di c1 o c2 rispettivamente per x 0
o x 0. Il valore che questa funzione assume modula il modello per i punti che non
appartengono a Γ. Maggiore è il suo valore minore sarà il peso del numeratore della
funzione d x y a c x nell’equazione complessiva del modello.
Il numeratore di questa funzione tiene conto della distanza che intercorre tra il punto x y del vaso e il punto con medesima ascissa x , che appartiene al luogo Γ. Il
termine sgn y che compare al numeratore è stato introdotto per correggere il com-
2.4 La funzione modello
31
10
8
6
4
2
0
−2
−4
−4
−3
−2
−1
0
1
2
3
4
Figura 2.5: funzione c con c1 10, c2 3
portamento errato che si avrebbe avuto per y yod . Infatti senza tale accorgimento
l’espressione:
x
a
y d x y a c x c x (2.6)
non avrebbe indicato la distanza geometrica tra i due punti, ma la somma tra il
valore dell’ordinata y e l’ordinata della curva parabolica piú vicina.
Sulla base di quanto esposto finora, una possibile espressione per la funzione del
modello che esprime la direzione è:
θm arctan ! sgn x sgn y 1
2a x
a
d x y a c x #"$
(2.7)
funzione che dipende dai parametri xod yod a e dalla funzione c x .
Come si può vedere dalla (2.7) e dalle fig.2.6 e 2.8, il contributo della distanza al
valore di θm è nullo per i punti x y appartenenti a Γ (quindi θm indica la direzione
della tangente al luogo Γ), mentre è diverso da zero per i punti al di fuori del luogo
gamma (la direzione trovata non è piú parallela alla tangente a Γ). A parità di valore di
c x , più ci si allontana da Γ più il contributo della funzione d implica un valore di θ m
prossimo alla verticale.
32
Un modello geometrico della struttura vascolare retinica
d2
|d2| > |d1| > d0=0
d1
d2
d1
d0=0
d3
d4
d5
d3
|d5| > | |d4| > |d3| > d0=0
d4
d5
Figura 2.6: contributo della funzione d nei punti con medesima ascissa
La funzione (2.7), quindi, sulla base delle ipotesi fatte, partendo dalle coordinate
spaziali dei punti delle principali strutture vascolari fornisce la direzione del vaso calcolata attraverso il nostro modello matematico.
2.5 Analisi dei parametri del modello
In questo paragrafo vengono descritti i parametri che compaiono nel modello e la loro
influenza.
2.5.1 I parametri xod e yod
Sono le coordinate dei vertici coincidenti delle due parabole del luogo Γ. Il valore
assunto da questi due parametri al termine del processo di minimizzazione fornirà
l’indicazione sulla posizione del disco ottico.
2.5.2 Parametro a
Il valore del parametro a, come si può osservare nella 2.1, determina l’apertura dalle
parabole del luogo Γ. Come si può vedere in fig.2.2, ad un punto viene associata una
2.5 Analisi dei parametri del modello
33
500
450
450
400
400
350
350
300
300
250
250
200
200
150
150
150
200
250
300
350
400
a) a 0 007
450
500
150
200
250
300
350
400
450
500
b) a 0 003
Figura 2.7: funzione modello al variare del parametro a
direzione tangente alla parabola se questo giace su di essa, mentre tende a una direzione
perpendicolare all’asse delle ascisse mano a mano che ci si allontana dal luogo geometrico Γ. Si nota, confrontando la fig.2.7 a e b che in un medesimo punto la direzione
cambia al variare di a.
Inoltre si verifica che il valore di tale parametro, a parità di angolo di scansione
dell’oftalmoscopio, indica il fattore di zoom dell’immagine. Infatti, se la distanza tra
l’occhio e lo strumento di acquisizione è bassa, il luogo geometrico dei vasi apparirà
come una parabola con ampiezza maggiore. Viceversa se la distanza di acquisizione è
maggiore il luogo Γ assumerà un andamento piú schiacciato.
Determinate il valore di a può risultare utile, ad esempio, nel confronto tra due
immagini acquisite sullo stesso paziente per avere una stima della diversa distanza di
acquisizione.
2.5.3 La funzione c % x &('
Le strutture vascolari visualizzate in un’immagine retinica hanno un’andamento differente a seconda che si tratti dei vasi che scorrono nella zona nasale del bulbo oculare
oppure nella zona laterale. Infatti, come si può notare anche dalla fig.2.8, i vasi nella
zona nasale presentano un’andamento radiale rispetto a quelli della zona laterale che
hanno un andamento piú incurvato.Per tener conto di tale fenomeno è stata introdotta
nella funzione d la funzione c che ha il compito di modulare la direzione del modello
per quei punti che non appartengono a Γ. Come si può osservare dalla definizione di
tale funzione e dall’andamento rappresentato in fig.2.5 la funzione assume valori che
34
Un modello geometrico della struttura vascolare retinica
tendono rispettivamente a c1 e c2 per valori di x 0 e x 0. Infatti per x y Γ il
numeratore di 2.4 si annulla e quindi (2.4) dà contributo nullo al valore di θ m espresso
dalla 2.7 per qualsiasi valore assunto da c x . L’andamento del modello in questi punti
avrà sempre direzione tangente al luogo Γ (fig.2.2).
Figura 2.8: modello fittato alla im0018 del dat set
Invece, per punti che non appartengono a Γ il numeratore di (2.4) assume un valore diverso da zero e quindi assume rilevanza il valore di c x . Nella fig.2.9a,b,c,d
si osserva come diversi valori delle costanti c1 )
c2 fanno si che il comportamento
del modello sia differente, ad un punto con medesime coordinate viene associata una
direzione diversa. Nella fig.2.9 si nota come differenti valori nei moduli delle costanti determinino una maggiore o minore influenza della funzione d sull’andamento del
modello, rispettivamente a sinistra e a destra del vertice delle parabole). Come si vede
in fig.2.8 nella zona nasale le direzioni vascolari risultano più radiali rispetto alla zona
temporale in cui i vasi hanno forma più incurvata. Sulla base di queste osservazioni
si può notare che il valore assunto dalle due costanti al termine del processo di iden-
2.5 Analisi dei parametri del modello
35
tificazione del disco ottico è in grado di fornire anche l’indicazione di quale occhio si
è analizzato. Infatti la costante che presenta modulo maggiore corrisponde alla zona
nasale dell’occhio e una volta nota la posizione della zona nasale si conosce anche
quale occhio si sta analizzando.
450
450
400
400
350
350
300
300
250
250
200
200
150
150
200
250
300
350
400
450
500
550
150
200
250
a) c1 *
c2 5
350
400
450
500
b) c1 c2 20
450
450
400
400
350
350
300
300
250
250
200
200
150
150
300
150
200
250
300
350
400
c) c1 c2 200
450
500
200
250
300
350
400
d) c1 c2 400
Figura 2.9: modello al variare di c1 c2 450
500
550
36
Un modello geometrico della struttura vascolare retinica
450
400
350
300
250
200
150
150
200
250
300
350
Figura 2.10: modello con c1 400
c2 ; c1 450
500
400 ; c2 + 40
Capitolo 3
Aspetti applicativi e comportamento
del modello
La funzione modello definita nel capitolo precedente fornisce una descrizione geometrica delle direzioni delle principali strutture vascolari in un’immagine retinica. Per determinare la posizione del disco ottico si devono determinare i valori dei parametri del
modello che permettono di minimizzare la somma quadratica delle differenze (residui)
tra i dati del modello θmi e i dati disponibili sperimentalmente. Si è provveduto ad analizzare analiticamente il comportamento dei residui per verificare effettivamente presentino un minimo. Dopo aver brevemente descritto i dati sperimentali utilizzati e il
modo in cui essi sono stati ricavati, nei successivi paragrafi si analizza il comportamento dei residui al variare dei singoli parametri del modello. Una volta determinato
il minimo dei residui , i valori dei parametri xod yod forniscono le indicazioni per
l’identificazione della posizione del disco ottico.
3.1 I dati sperimentali dello STARE
Lo STARE ci ha fornito per ogni immagine retinica ben 10 realizzazioni del loro algoritmo per l’estrazione delle strutture vascolari (fig.3.1). Ogni realizzazione si differenzia
da un’altra per la sensibilità dimostrata nel rintracciare anche i vasi piú piccoli. Con il
livello 9 (immagini identificate con prefisso im#-vessels9 nel data set dello STARE) si
ha la massima estrazione in numero di punti ed anche la conseguente interpretazione
di rumore (macchie o microemorragie) come piccoli vasi, oltre alla possibile fusione
di strutture vascolari in un’unica zona chiara (visibile nel passaggio tra la soglia 6 e la
7, in alto a destra per l’immagine im0018). Con il livello 0 si ha il minimo numero di
38
Aspetti applicativi e comportamento del modello
dati disponibili per ogni singola immagine. Lo STARE, nel proprio sito, indica come
risultato ottimale quello ottenuto sulle strutture vascolari estratte con livello di soglia
pari a 4. Sono state dunque le im#-vessels4.ppm ad essere state usate per valutare anche
il nostro lavoro.
vessels0
vessels1
vessels2
vessels3
vessels4
vessels5
vessels6
vessels7
vessels8
0
100
200
300
400
500
600
vessels9
im0018
0
100
200
300
400
500
Sparse Tracking
Figura 3.1: i 10 livelli di estrazione dei vasi
600
700
3.1 I dati sperimentali dello STARE
39
campioni considerati − NB dir asse y verso il basso
a) estrazione vessels4
b) operazione di thin
Figura 3.2: immagine pre-elaborata im003-vessels4 del data set dello STARE (in blu i
punti scelti)
Pur disponendo di un algoritmo per il tracciamento dei vasi (Sparse Tracking, messo
a punto in un precedente lavoro di tesi), necessario all’estrazione delle direzioni dei
vasi dalle immagini originali, abbiamo preferito condurre le prime indagini ponendoci
in condizione di poter confrontare i nostri risultati con quelli raggiunti dallo STARE. I
dati sperimentali utilizzati nel presente lavoro provengono direttamente dalle immagini
originali dello STARE, pre-elaborate dal loro algoritmo di estrazione dei vasi.
Partendo da tale pre-elaborazione (fig.3.2a), abbiamo estratto le direzioni dei vasi
su un numero fisso di 300 punti (numero uguale per tutte 81 le immagini a disposizione). Si è proceduto ad un preventivo assottigliamento (operazione di thin, fig.3.2b)
dell’immagine binaria. Su questa immagine assottigliata si è proceduto alla successiva
identificazione delle direzioni dei vasi nei soli punti interessati all’indagine, quelli che
costituiranno i dati sperimentali.
Definita, intorno di ogni punto considerato, una regione di forma quadrata di lato
20 pixel (fig.3.3) si è proceduto all’identificazione della direzione del vaso utilizzando
i soli pixel appartenenti a tale area (ROI).
Questa tecnica fornisce le coordinate del punto appartenente ad un vaso, la relativa
direzione ed un peso legato al calibro del vaso, sulla base dell’occupazione percentuale
del vaso stesso rapportato all’intera superficie della ROI. In forma vettoriale tutti i dati
40
Aspetti applicativi e comportamento del modello
sperimentali possono essere riassunti come
,
, x y θ cl-
x
y
θ
cl (3.1)
,
, x1 x2 /.../ xn -10
y, 1 y2 /.../ yn - 0
(3.2)
θ1 θ2 ...2 θn - 0
cl1 cl2 ...# cln - 0
con cli il peso relativo di ogni porzione di vaso estratto. Indicando con s i il numero di
pixel appartenenti alla porzione di vaso interno alla ROI e con sROI il numero totale di
pixel definiamo
cli si
(3.3)
sROI
Il peso relativo, assegnato attraverso la definizione della ROI da 20x20 pixel, sulle
immagini dello STARE è limitato al valore 1 (100% di ROI occupata dalla porzione
di vaso) e dunque è un processo a saturazione. Questo modo di pesare il calibro dei
vasi andrebbe preso in considerazione soprattutto se si prevede di lavorare su immagini patologiche. L’interpretazione errata di zone patologiche a vasta copertura, viste
come vasi ed associate ad algoritmi privi di saturazione possono ingenerare grossi errori
nella determinazione del disco ottico. Pochi punti appartenenti a zone patologiche, con
direzioni dunque prive di senso, con diametro associato molto maggiore della media
dei diamertri dei vasi, potrebbero infatti falsare l’adattamento del modello.
x
y
θi
(x i, yi )
xi yi θ i clri
Figura 3.3: definizione della ROI attorno a xi yi 3.2 I dati sperimentali dello Sparse Tracking
41
Figura 3.4: direzioni estratte sovrapposte all’immagine originale e all’immagine binaria
pre-elaborata
3.2 I dati sperimentali dello Sparse Tracking
Il lavoro operato dallo Sparse Tracking è molto piú “raffinato” nella definizione del
calibro del vaso. Definto il baricentro, di ogni singolo tratto di vaso, ne calcola il diametro, espresso in punti, contandone il numero presente sulla direzione ortogonale
alla tangente (fig.3.5). Successivamente realizza un filtraggio numerico sui diametri
Figura 3.5: tratto di vaso e dati associati
estratti per non incorrere in sovrastime eccessive nei punti di diramazione delle strutture vascolari. Formalmente possiamo indicare l’insieme dei dati ottenuti alla fine del
tracciamento con le N 4-ple
xk yk θk dk k 1 ../.# N
(3.4)
42
Aspetti applicativi e comportamento del modello
dove N indica il numero totale di vasi estratti mentre i 4 vettori si riferiscono rispettivamente alle ascisse, ordinate, direzioni e diametri di ogni baricentro; per il segmento
k-esimo avremo quindi:
,
,
xk , x1 x2 ./../ x pk - 0
, y1 3 y2 ...# y pk -10
yk θk dk θ1 θ2 ...# θ pk - 0
d1 d2 ...# d pk - 0
(3.5)
con pk numero totale dei baricentri identificati per il vaso k-esimo. In questa
situazione definiamo con cli il calibro relativo ad ogni baricentro identificato (3.6)
cli di
n
∑i 4 1 d i
(3.6)
Con n indichiamo sempre il numero totale di punti estratti dall’immagine. Per avere,
quanto piú possibile, una valutazione oggettiva sul risultato della localizzazione, il numero di dati sperimentali provenienti dai due sistemi di estrazione vascolare (STARE o
Sparse Tracking) dovranno coincidere, confrontando la 3.1 con le 3.4 e 3.5
n
N
∑ pk
(3.7)
k
Alla fine quindi che si utilizzi l’uno o l’latro sistema i dati su cui abbiamo adattato
il modello possono esprimersi nella comune
rappresentazione vettoriale (3.8 e 3.9)
,
, x y θ clr -
x
y
θ
cl (3.8)
,
, x1 x2 /.../ xn - 0
y, 1 y2 /.../ yn - 0
θ1 θ2 ...2 θn - 0
(3.9)
cl1 cl2 ...# cln - 0
dove n in accordo con la 3.7 rappresenta il numero totale di punti presi in esame per
ogni singola immagine. In fig.3.6 è possibile confrontare lo stesso numero (n=600) di
campioni estratti con i due sistemi sulla medesima immagine.
3.3 Residui
43
−100
0
0
100
100
200
200
300
300
400
400
500
600
500
0
100
200
300
400
500
600
700
600
0
100
a) estratte dallo STARE
200
300
400
500
600
b) estratte con Sparse Tracking
Figura 3.6: confronto tra 600 punti estratti dai due sistemi (immagine: im0018 del data
set - punti e direzioni calcolate)
3.3 Residui
Come già accennato per determinare quali sono i valori dei parametri che permettono
al modello di rappresentare nel modo migliore l’andamento delle strutture vascolari, si
deve calcolare 5 xi yi la (2.7)
θmi arctan ! sgn xi sgn yi 1
2a xi d xi yi a c xi /#"$
(3.10)
a
dove
xi xi xod
yi yi yod
(3.11)
e successivamente confrontare il suo valore con quello di θi attraverso la somma dei
residui quadratici (funzione costo) definita come
res n
∑
i4 1
θi θmi 2 cli
(3.12)
dove, in accordo con la (3.3) o (3.6), con cli indichiamo un peso associato al calibro
del vaso nel punto di coordinate xi yi .
Quanto piú il valore di res sarà basso, tanto piú il fit del modello sarà buono. Si
vuole sottolineare che il modello approssima tanto meglio i dati sperimentali quanto
700
44
Aspetti applicativi e comportamento del modello
piú le direzioni (e non le direzioni e verso), individuate da θmi e θi , sono parallele.
|(α−β)−π |
α−β
α
β+π
α
β
β
a) (α β π
2
b) α β Figura 3.7: differenze angolari: a) ∆ α β 6
π
2
α β , b) ∆ α β 7
α β π 8
In base a ciò, per il calcolo della θi θm , che compare nella 3.10, si è stata
utilizzata la funzione ∆ α β definita da
9:
∆ α β ;
:<
∆ β α
se
α β = π 8
se
α β
π
2 α β
α β 3π
2
,
altrimenti
la funzione non è stata definita per α β 3π
π π - e θm 2 perché θi quindi la loro differenza non può mai essere maggiore di 3π
2 (fig.3.8).
θ mi
θi
Figura 3.8: insiemi di definizione per θi e θmi
,
(3.13)
π2 π2 -
3.4 Analisi del comportamento dei residui
45
Inoltre assumendo la funzione ∆ α β valori sempre positivi, si può sostituire, per
la ricerca del valore minimo, la (3.12) con la 3.14
n
∑ ∆ θi θmi clri
res i4 1
(3.14)
In ultimo il processo di identificazione si trasformerà in un problema di ricerca del
minimo della funzione costo data appunto dalla 3.14, dunque:
min res > xod 3 yod 3 a 3 c1 3 c2 ?
(3.15)
3.4 Analisi del comportamento dei residui
Riportiamo brevemente l’analisi condotta sul comportamento dei residui e della funzione modello. Per poterne garantire l’uso in un processo automatico bisogna verificare
la non divergenza della funzione residui al variare dei 5 parametri che compongono il
mdello. L’analisi è stata condotta nell’unico modo possibile, attraverso il blocco forzato
di alcuni dei 5 parametri e valutando lo studio sui restanti.
3.4.1 Parametri xod @ yod
Bloccando a c1 c2 (assegnando valori appropriati per l’immagine oggetto di analisi) si
è osservato l’andamento dei residui al variare di xod e yod su una griglia equispaziata
sovrapposta all’immagine.
950
1000
950
900
900
850
850
800
750
700
800
650
600
800
750
800
600
600
400
400
200
700
200
0
0
Figura 3.9: funzione residui al variare delle sole componenti xod e yod .
Una rappresentazione grafica dei valori assunti dalla funzione residui e visibile in
46
Aspetti applicativi e comportamento del modello
fig.3.9. Difficile risulta capire l’andamento del minimo di tale funzione. Quella rappresentata è infatti una realizzazione della funzione residuo valutata su una griglia, che per
quanto fitta, non mette in luce la sua vera natura oscillatoria.
3.4.2 Parametro a
Per valutare l’andamento dei residui al variare del parametro a (apertura delle parabole)
si sono bloccati xod yod c1 c2 . Anche per questo parametro si è potuto osservare che la
funzione residuo sviluppa un minimo assoluto (fig.3.10).
1
0.95
0.9
residues value
0.85
0.8
0.75
0.7
0.65
0.6
0.55
0.5
0
0.01
0.02
0.03
0.04
0.05
a value
0.06
0.07
0.08
0.09
0.1
Figura 3.10: funzione residui al variare del parametro a 0.
3.4.3 Parametri c1 e c2
L’ultima verifica, condotta su c1 e c2 , si è svolta come per le precedenti bloccando
i restanti parametri xod yod a (sempre scelti manualmente osservando l’immagine retinica) e muovendo c1 e c2 su una griglia (fig.3.11 a). Anche in questo caso abbiamo
ritrovato conferma della validità del modello. Non potendo in questo caso verificare
l’esattezza numerica dei valori associati ai parametri c1 e c2 ci si è limitati a verificarne
l’attendibilità sulla base di considerazioni visive. Come ci si attendeva i valori diversi dei due parametri rispecchiano le direzioni piú o meno radiali dei vasi a sinistra o a
destra dell’ascissa del centro del disco ottico. Inoltre vi è la presenza di un minimo assoluto della funzione residui (fig.3.11 b). Questi parametri mettono in evidenza una meno
marcata predisposizione ad essere usati come indicatori della posizione di minimo assoluto della funzione residui. A differenza degli altri parametri del modello, infatti,
3.4 Analisi del comportamento dei residui
47
0
100
200
300
c
2
400
500
600
700
800
900
c2
1000
c1
a) andamento dei residui
0
100
200
300
400
500
c1
600
700
800
900
1000
b) (*) valore di minimo
Figura 3.11: andamento dei residui al variare di c1 e c2 .
sono ben visibili ampie zone di plateau della funzione residui nell’intorno del punto di
minimo e dunque un minor potere discriminante se paragonato a quello dei parametri
xod yod a. Non per questo, però, possono essere trascurati dalla determinazione del
miglio rfit tra modello e dati.
48
Aspetti applicativi e comportamento del modello
Capitolo 4
La stima parametrica mediante
Simulated Annealing
Il modello matematico introdotto per lo studio delle strutture vascolari, esaminato in
dettaglio in [2.4] viene qui analizzato dal punto di vista della difficoltà computazionale
di rendere automatico il processo di minimizzazione dei residui.
Gli algoritmi di ricerca del minimo della funzione costo possono essere classificati
in tre classi:
1. tecniche enumerative;
2. tecniche numeriche;
3. tecniche probabilistiche o evolutive.
Le tecniche enumerative ricercano la soluzione ottima in tutti i punti del dominio,
eventualmente discretizzato, della funzione. Semplificazioni possono derivare dalla
riduzione del problema in sottoproblemi piú semplici. La programmazione dinamica è
una di queste tecniche.
Le tecniche numeriche usano un insieme di condizioni necessarie e sufficienti che
devono essere soddisfatte dalla soluzione del problema di ottimizzazione. Queste si
possono classificare in dirette e indirette. I metodi indiretti ricercano il minimo di una
funzione risolvendo un insieme di funzioni non lineari e ricercando iterativamente la
soluzione finchè il gradiente della funzione costo è nullo. I metodi diretti fanno in
modo che sia il gradiente a guidare la ricerca della soluzione.
Le tecniche probabilistiche si basano su tecniche enumerative, ma usano informazioni addizionali per effettuare la ricerca e possono essere viste come processi evolutivi.
50
La stima parametrica mediante Simulated Annealing
Per affrontare il problema di minimizzazione della funzione costo abbiamo deciso
di affidarci a quest’ultima classe di algoritmi, non basati dunque su gradienti ma su un
algoritmo a discesa basato su movimenti stocastici delle varibili, per poter raggiungere
il minimo assoluto della funzione costo cercando di non restare bloccato in minimi
locali.
4.1 Tecniche evolutive
Il problema di molti algoritmi per la ricerca di minimi, come quelli del gradiente è che
funzionano correttamente solo se è presente un solo minimo, altrimenti sovente si può
cadere in un minimo locale della funzione anzichè nel minimo assoluto.
Sono stati cosí sviluppati una serie di algoritmi basati su concetti probabilistici che
ovviano al fatto che il determinismo in questi casi non è la procedura che fornisce i
migliori risultati . Questa classe di algoritmi è sovente utilizzata sia per l’ottimizzazione
di circuiti e sistemi elettronici, ma ancor piú spesso, nei sistemi CAD di progettazione.
Due di questi, particolarmente utilizzati in molti campi sono l’algoritmo di Simulated
Annealing (nelle sue numerose varianti) che usa un processo evolutivo termodinamico
e gli algoritmi genetici che sfruttano tecniche evolutive biologiche. Noi, per il nostro
lavoro, faremo uso del Simulated Annealing (SA), che tra gli algoritmi probabilistici è
uno di quelli che dà migliori risultati.
4.2 Simulated Annealing
Nella fisica della materia condensata il procedimento di annealing è il processo utile a
raggiungere lo stato di energia minima di un solido in un bagno termico. In generale
tale processo consiste in due passi
1. - innalzare la temperatura del bagno termico fino al valore massimo per il quale
il solido fonde;
2. - diminuire gradualmente la temperatura del bagno termico fino a che gli atomi
del metallo raggiungono lo stato (cristallino) di energia minima.
Si pensi ad esempio al metodo usato per sistemare nella maniera migliore possibile
delle arance in una cassetta.In questo caso agitare la cassetta, significa fornire energia
ad ogni arancia, inizialmente in una posizione di equilibrio locale dovuta alle forze di
4.2 Simulated Annealing
51
attrito, per uscire da quella posizione e trovarne una nuova ad energia minore. Dal
punto di vista fisico, le molecole di un liquido si muovono liberamente una rispetto
all’altra. Raffreddando il liquido, la mobilità termica viene diminuita fino a quando gli
atomi si organizzano in una struttura cristallina ordinata. Il fatto interessante (e sorprendente) è che per raffreddamenti "lenti" il materiale è capace di trovare la strada per il
minimo di energia. Se il medesimo liquido è invece raffreddato rapidamente, il metallo
fuso raggiunge uno stato poli-cristallino o uno stato amorfo con un valore maggiore
di energia. In un certo senso, se il raffreddamento è sufficientemente lento gli atomi
possono esplorare varie disposizioni locali e rimanere intrappolati nella configurazione
con valore di energia minima.
Il processo di annealing è stato introdotto anche in analisi numerica negli anni cinquanta da Metropolis e dai suoi collaboratori [48]. L’algoritmo introdotto da questi
autori per simulare l’evoluzione di un solido in un bagno termico si basa sulla generazione di una sequenza di stati del solido stesso nel modo seguente. Dato uno stato
corrente I a cui corrisponde l’energia Ei , lo stato seguente J è generato tramite una
piccola perturbazione di I (per esempio spostando alcune molecole o atomi). L’energia
del nuovo stato è E j , se la differenza E j Ei è minore o uguale a zero lo stato J è
acettato come stato corrente. Se la differenza tra le energie è invece positiva, lo stato J
è accettato con probabilità legata al valore assunto da
>
e Ei E j ?BA kT
(4.1)
dove T denota la temperatura del bagno termico e k è una costante fisica nota come
costante di Boltzmann. Il nuovo stato è accettato solo se il valore assunto dalla (4.1) è
maggiore di numero generato casualmente nell’intervallo [0,1].
>
e Ei E j ?BA kT
Random 0 1 (4.2)
Il criterio di accettazione descritto in (4.2) è noto come criterio di Metropolis (esistono
anche altre funzioni di probabilità).
Abbiamo già detto che durante gli esperimenti si raggiunge lo stato di equilibrio
a minima energia se la temperatura viene diminuita in modo sufficientemente lento.
Nell’algoritmo di Metropolis questo effetto è ottenuto generando un "grande" numero
di transizioni per una data temperatura. Il fatto di poter accettare con una certa probabilità un nuovo stato ad energia superiore rende possibile l’uscita da un punto di minimo
locale della funzione costo.
52
La stima parametrica mediante Simulated Annealing
f(x)
Soluzione corrente X(i)
Se la soluzione in X(i+1)
è peggiore, può essere accettata
con una certa probabilità
dipendente dalla Temperatura
Se la soluzione
in x(i+1) è migliore
è sempre accettata
Minimo locale (o relativo)
Minimo globale (o assoluto)
Figura 4.1: criterio di accettazione degli stati
Intorno al 1980 alcuni autori [20] hanno applicato le medesime idee per la soluzione
di un problema di minimo.In particolare è stato applicato l’algoritmo di Metropolis per
la ricerca del percorso ottimale per un circuito stampato. L’energia è sostituita da una
funzione costo che si vuole minimizzare (per esempio la lunghezza di un percorso),
mentre gli stati sono le soluzioni possibili del problema di minimo. Si introduce inoltre
un parametro di controllo analogo alla temperatura del processo fisico di annelaing (in
accordo col parallleo termodinamico continuerà a chiamarsi temperatura).
Il valore di T al passo n viene scelto normalmente tale che:
Tn αTn 1
(4.3)
con α compreso tra 0 95 e 0 8. In questo modo la temperatura scenderà lentamente
con il progredire delle iterazioni.
La simulazione attuata dall’algoritmo parte a temperatura "alta". Questo fa sí che
il valore dell’esponenziale descritto nella funzione di probabilità (4.1) assuma valori
prossimi all’unità e di conseguenza che vengano accettati nuovi stati a costo maggiore.
Con il progredire delle iterazioni, la temperatura si abbassa e di conseguenza la probabilità di accettazione di nuovi stati a costi superiori diminuisce, tali stati vengono cioè
4.3 Addestramento del SA
53
Initialization(Current_solution,Temperature)
Calculation of the Current_Cost
LOOP
New_State
Calculation of the New_Cost
IF ∆ (New_Cost−Current_Cost)< 0 THEN
Current_State=New_State
ELSE
Current_Cost−New_Cost
IF Exp
> Random(0,1)
Temperature
THEN
−−Accept
Current_State=New_State
ELSE
−−Reject
Decrease the temperature
(
)
EXIT When STOP_CRITERON
END LOOP
Figura 4.2: Implementazione algoritmica generale del Simulated Annealing
rifiutati (fig.4.1). Uno schema del tutto generico del SA è riportato in fig.4.2. La parte
stocastica del processo di ricerca del SA è rappresentato dal moto casuale impartito
consecutivamente ad ogni parametro del modello. Ogni passo può essere rappresentato
come la realizzazione di una funzione del , tipo
passo parn 4 scala n DC randn- n 1 ... 5
(4.4)
dove randn restituisce un numero pseudocasuale a media nulla e varianza e unitaria.
In fig.4.3 è possibile osservare una realizzazione di cinquanta passi.
4.3 Addestramento del SA
Il fallimento nella ricerca di minimo attraverso l’uso di algoritmi a gradiente non è da
ritenersi sorprendente, vista la funzione costo con cui abbiamo a che fare (le fig.4.4 a e b
raffigurano due angolazioni della stessa funzione residui plottata al variare di x od yod ).
Per avere un’idea della difficoltà nella ricerca di minimo si osservi la fig.4.4e. Tale
figura rappresenta una sezione della funzione residui (bloccando quattro parametri che
compongono il modello y y 0 a a0 c1 c10 c2 c20 ).
Si è rappresentata la funzione residuo al variare della sola componente x del mo-
54
La stima parametrica mediante Simulated Annealing
2.5
2
1.5
1
0.5
0
−0.5
−1
−1.5
−2
−2.5
0
5
10
15
20
25
30
35
40
45
50
Figura 4.3: funzione randn: realizzazione di moto casuale.
dello tra 1 e 700 e con y=y’=279 pari all’ordinata del centro del disco (fig.4.4c). Sono
ben visibili numerosi picchi, con molte oscillazioni che generano innumerevoli minimi
locali. L’aver verificato la validità del modello per via manuale, affrontando una ricerca
di tipo esaustivo (su griglie piú o meno fitte), non è garanzia di una facile ricerca del
minimo assoluto della funzione costo.
In fig.4.4f la stessa indagine questa volta a y y 0E0 100, mantenendo invariati
i valori di a a0 c1 c10 c2 c20 . E’ possibile notare come la nuova sezione abbia
assunto una configurazione del tutto diversa dalla precedente. E’ bene notare anche
come il minimo assoluto di questa nuova funzione scalare (al variare dell’ascissa x
tra 1 e 700) si sia spostato da una posizione molto vicina all’origine ad una molto
piú vicina all’estremo superiore (non tragga in inganno la fig.4.4f in cui il minimo
assoluto sembra indicare una posizione errata del centro del disco fornendo un minimo
quasi all’estremo opposto dell’immagine; quello indicato è infatti di molto superiore al
minimo della sezione indicata in fig.4.4e (si noti la differente scala alle ordinate)) .
La scelta di introdurre l’uso del SA (una particolare ralizzazione dell’algoritmo
generale) per superare le complicazioni esplorative della funzione costo conduce inevitabilmente a dover definire alcuni parametri che ne compongono la struttura e ne
influenzano l’esecuzione. Questa parte può senz’altro ritenersi la piú delicata e impegnativa dell’intero lavoro fin qui presentato. La parete stocastica del SA non permette
infatti di poter stabilire un metodo generale di addestramento.
4.3 Addestramento del SA
55
270
260
250
270
240
260
230
250
220
240
210
230
200
220
190
210
180
800
200
190
600
400
200
0
0
100
200
300
400
500
600
700
180
0
800
600
100
200
400
300
400
500
200
600
700
0
a) funzione residui
b) stessa funzione da angolo diverso
c) le due sezioni scelte
d) mappa colori residui
e) y y0 a a0 c1 c10 c2 c20
f ) y y0E0 a a0 c1 c10 c2 c20
Figura 4.4: analisi visiva dei residui e alcune sezioni per l’im0003 del data set
56
La stima parametrica mediante Simulated Annealing
4.4 Percorso di ricerca
Facendo riferimento alla descrizione genearle del SA (fig.4.2) nei paragrafi successivi
esamineremo tutti i parametri che ne influenzano l’esecuzione. Spiegheremo inoltre i
passi piú importanti che ci hanno portato a fissarne un valore per l’analisi di tutte 81 le
immagini del data set.
4.4.1 Criterio di terminazione
Come criterio per la terminazione del SA abbiamo usato una duplice condizione.
1. nel caso in cui vengano rifiutati piú di cinque nuovi stati consecutivi sulla base
delle attuali condizioni di temperatura del sistema.
2. si sia raggiunto in limite massimo, fissato a 400 iterazioni, per ogni realizzazione
del SA.
Nella pratica raramente si è arrivato a superare il numero di 300 iterazioni muovendo tre parametri xod yod a e di 380 iterazioni muovendo tutti i cinque parametri
xod yod a c1 c2 . Nel primo caso, fissati i valori di c1 e c2 , è possibile anche aumentare a 10 il numero di nuovi stati scartati consecutivamente, restando comunque
sotto le 300 iterazioni totali prima di raggiungere una soluzione stabile. Agendo su
tutti i parametri del modello è stato necessario abbassare a 5 tale soglia, diversamente
il SA avrebbe terminato il processo dopo oltre 1300 iterazioni. Nussun limite è invece
stato imposto al valore finale raggiunto dalla Temperatura del sistema.
4.4.2 Temperatura iniziale
La temperatura iniziale stabilisce la capacità del SA di accettare, nella prima fase esplorativa, nuovi stati (al passo k) a energia superiore allo stato precedente (al passo k 1).
Partire con temperature troppo alte significherebbe aumentare il numero di iterzioni,
non sempre legate alla sicurezza di poter garantire l’ottimo nella ricerca. Temperature
troppo basse, viceversa, non consentono l’uscita da eventuali minimi locali. Per un
primo approccio alla determinazione dei parametri del SA, fissiamo i valori di a c 1 e
c2 e plottiamo su una griglia la funzione residuo. Da un’analisi visiva (fig.4.5), della funzione plottata variando le sole coordinate xod yod , è stato possibile verificare la
presenza di un certo numero, variabile, di profonde valli. Sono state considerate distinte
4.4 Percorso di ricerca
57
Figura 4.5: plot dei residui, il minimo indica la posizione del disco ottico
le valli tra le cui coordinate dei minimi esisteva una significativa differenza, quantificabile approssimativamente in almeno un quarto della dimensione minore dell’intera
immagine. A tale osservazione siamo giunti limitando lo studio a sole 17 immagini sul
totale di 81. Ricostruire in tutte le immagini la funzione residuo attraverso una ricerca
esaustiva su griglie che coprissero l’intera superficie dell’immagine avrebbe comportato un notevole impiego di tempo. Inoltre i risultati ottenuti non avrebbero comunque
rappresentato l’intera casistica delle possibili realizzazioni del fit tra modello e dati
sperimentali (avendo bloccato due delle cinque variabili oggetto di studio). L’obiettivo
preliminare era solo capire la variabilità della funzione costo.
Il caso piú agevole per la ricerca è ovviamente quello caratterizzato da una sola
valle molto profonda rispetto ai minimi locali generati da micro-oscillazioni. Il caso
peggiore si ha quando, pur essendo evidente la differenza relativa tra il valore dei due
minimi, il raggio di attrazione della valle meno pronunciata risulta superiore a quello
della valle piú profonda. Una valle piú profonda e piú chiusa risulta meno rintracciabile
dal SA che una valle poco profonda ma molto estesa. Dopo alcune visualizzazioni dei
tracciati del movimento del SA abbiamo fissato una temperatura iniziale di 200.
Infine il parametro che regola la velocità di raffreddamento del sistema (4.3) è stato
58
La stima parametrica mediante Simulated Annealing
fissato al valore
α 0 88
(4.5)
4.4.3 Numero dati sperimentali
I dati sperimentali estratti dalle 81 immagini binarie si compongono di un totale variabile tra i 4300 e 7800 punti ad immagine. Tale variabilità può essere legata sia a
caratteristiche proprie delle immagini, in pratica alla qualità dell’immagine originale
acquisita, sia a parametri che agiscono sulla sensibilità dell’algoritmo di estrazione vascolare e dunque solo indirettamente legati alle caratteristiche fotografiche. Nel data set
messoci a disposizione dallo STARE, oltre alle foto originali, e alle relative immagini
binarie, abbiamo ricevuto anche altre nove realizzazioni dell’algoritmo di estrazione
dei vasi. Le 10 realizzazioni totali per ogni immagine si distinguono per i livelli diversi
di soglia di estrazione. Con valori piú bassi di soglia le strutture vascolari riconosciute
sono solo le maggiori. All’aumentare del valore della soglia vengono ricostruite sempre
piú le strutture a calibro minore. Come già riportato non ci addentreremo su considerazioni sulla validità di tale algoritmo. Per un confronto diretto abbiamo deciso di usare
le immagini ottenute con valore di soglia pari a 4, le stesse che hanno permesso di
raggiungere allo STARE l’ottimo risultato di sole 9 localizzazioni errate su 81 prove.
La seconda scelta operata riguardava la decisione di fissare un numero di punti per i
dati sperimentali. Sempre sulle 17 immagini su cui si è fatta un’indagine esaustiva
fissando i parametri a c1 c2 e facendo variare su una griglia xod e yod , si è valutata
la posizione fornita dal minimo della funzione residui al variare del numero di punti
sperimenatli. Partendo da 1200 punti siamo scesi di numero fino a considerarne solo
300, mantenendo comunque una buona individuazione della zona in cui il disco ottico
era posizionato. Questo, oltre a dimostrare la robustezza del modello considerato, ha
permesso di ridurre i tempi di calcolo.
4.4.4 Scelta dei punti di partenza
Per questa scelta abbiamo arbitrarimente fissato 2 dei cique parametri della nostra
funzione modello:
c1 125
c2 F 125
Valore iniziale per a è stato fissato al valore:
4.4 Percorso di ricerca
59
a 0 003
I primi tentativi di esecuzione del SA partendo dal centro di ogni immagine non
hanno permesso di trovare il minimo assoluto se non con un notevole numero di realizzazioni.
Il passo per a x e y è sto deciso pari a 50 (punti). In 5 immagini analizzate prima con
criteri esautivi e generanti ciascuna un minimo assoluto ad apertura "stretta", su venti
realizzazioni ciascuna il SA ha raggiunto il minimo assoluto solamente cinque volte.
Sulla base di queste osservazioni preliminari si è preferito restringere la zona di
ricerca, concedendo movimenti minori alle variabili rappresentanti le coordinate del
centro (xod yod ). Diminuendo a 30 il passo, occorre aumentare i punti di partenza sel
SA per dare comunque modo all’algoritmo di esplorare l’intera superficie. Un risultato
definitivo non esiste ma, per il nostro data set, quattro partenze dagli angoli dell’immagine si sono dimostrate buoni punti di partenza. Su tutte le immagini almeno una delle
quattro relaizzazoni del SA ha concluso il processo fornendo le coordinate del minimo
assoluto. In casi particolarmente facili (valle del minimo assoluto a largo raggio d’apertura) si è arrivati ad ottenere ben tre realizzazioni su quattro terminanti alle coordinate
corrette del disco.
Per i nostri scopi non ha comunque importanza “quante” delle realizzazioni rintraccino il minimo assoluto, quanto che in almeno una delle realizzazioni il minimo
assoluto venga trovato. Sarà un confronto tra tutte le realizzazioni a passare i valori del
subottimo alla seconda fase di affinamento della soluzione. Fissando valori diversi per
c1 e c2 (sempre simmetricamente uguali) le soluzioni trovate sembravano non mutare
eccessivamente (tutte le realizzazioni terminavano all’interno del disco). Il modello
sembra pertanto poco sensibile a questi due parametri, ma su questo aspetto torneremo
a piú avanti in questo stesso capitolo (Sez.4.5).
4.4.5 Scelta iniziale dei passi - Prima fase di ricerca
Per x e y un passo di 30 punti è sembrato valido. Per il parametro a, partendo dal valore
0 003, abbiamo stabilito passi di 0 0003. Restano bloccati in questa prima fase di
ricerca gli altri due parametri c1 e c2 che, come descritto sopra, sembrano non incidere
sul risultato (lo stesso era stato osservato durante lo studio preliminare).
60
La stima parametrica mediante Simulated Annealing
4.4.6 Ulteriori affinamenti - Seconda fase di ricerca
Le soluzione ottenute dal solo movimento di tre dei cinque parametri del modello rappresentano solo una soluzione intermedia e dunque subottima. Partendo quindi dal
risultato migliore fra le prime realizzazione del SA abbiamo dinimuto il passo per x e
y, altrettanto abbiamo fatto per il passo di a. Vengono inoltre svincolati i parametri c 1 e
c2 , permettendo di migliorare la soluzione estratta con la prima ricerca del SA. Il passo
per il movimento casuale di c1 e c2 è stato deciso pari a 15. Volendo in questa seconda
fase permettere il solo miglioramento del fit attraverso la mobilità di c1 e c2 abbiamo
abbassato a 4 la lunghezza dei passi per xod e yod e a 0 00005 quelli per il parametro
a. In fig.4.8 è possibile osservare in dettaglio la ricerca condotta nella seconda fase dal
SA (si notino le differenti lunghezze dei passi se confrontate con la fig.4.7).
4.4.7 Range dei parametri
Per ovvie ragioni le coordinate xod e yod sono state confinate all’interno delle delle
immagini, da 1 a 700 per i valori della x e da 1 a 605 per quelli della y. Nel caso delle pre-elaborazioni eseguite dallo Sparse Tracking le dimensioni delle immagini
sono sensibilemente inferiori a causa di un crop eseguito preventivamente sull’immagini originale. Tale crop provvede al ritaglio dei bordi scuri dell’immagine retinica,
facendo coincidere gli estremi della superficie retinica con le dimensioni dell’immagine da analizzare.
Al parametro a partendo dal valore 0 003 è stato concesso un campo di variazione tra
un minimo di 0 0005 e un massimo di 0 012.
Per c1 e c2 il range è stato regolato tra 0 e 400.
4.5 Considerazoni sull’intero processo
In 4 immagini su 81 le soluzioni, pur affinate col secondo ciclo del SA, si sono mantenute esterne al disco ottico. Su quattro immagini retiniche fallite è stata compiuta
un’analisi dettagliata. Un’analisi dettagliata ha messo in luce un limite della procedura
scelta nell’uso del SA. In alcuni casi infatti, l’immobilità dei parametri c 1 e c2 (nella
prima fase di ricerca) ha fatto propendere per una valle a minimo assoluto di coordinate esterne al disco ottico. L’analisi dei risultati evidenziava un posizionamento del
disco ottico coincidente con un minimo relativo della funzione residui e dunque erratamente scartato dalla seconda fase di ricerca fine. In figura 4.6 è visibile un esempio
4.5 Considerazoni sull’intero processo
61
Figura 4.6: importanza dei parametri c1 e c2 in condizioni limite
in cui i valori del minimo relativo e assoluto si scostano di poco. Il problema è stato corretto lasciando c1 e c2 libere di muoversi, sempre con passo 15, anche durante
la prima fase di ricerca del SA. I movimenti concessi per la mobilità dei parametri c 1
e c2 hanno permesso di mutare quella che era la valle a minimo assoluto in minimo
relativo, viceversa la posizione del disco ottico che prima era associata ad un minimo
relativo mutava nel minimo assoluto (4.6). A questo punto però, le partenze dai quattro angoli dell’immagine non erano sufficienti a garantire l’identificazione del minimo
assoluto. L’ampliamento a cinque dei parametri mossi ha comportato la possibilità da
parte del SA di trovare molti piú minimi relativi su cui terminare il processo di ricerca.
Abbiamo deciso dunque di portare a sei i punti di partenza del SA. Ai quattro angoli
abbiamo affiancato altre due partenze, rispettivamente con ascissa a 31 e 23 della larghezza dell’immagine e come ordinata la metà dell’altezza. In fig.4.7 è possibile osservare
le sei realizzazioni del SA. Questo aspetto non rappresenta comunque un problema, se
non per il tempo computazionale impiegato.
62
La stima parametrica mediante Simulated Annealing
Figura 4.7: le sei realizzazioni del SA
Figura 4.8: dettaglio della ricerca fine del SA partendo dal sub-ottimo trovato alla fine
della prima fase
Capitolo 5
Risultati
In questo capitolo, riporteiamo alcuni dei risultati ottenuti dopo l’applicazione del SA.
Metteremo in luce cosí gli ottimi risultati raggiunti anche in condizioni di non facile
determinazione.
5.1 Risultai del SA
Inutile il paragone con criteri di ricerca basati sul colore. Come già spiegato tali sistemi raggiungono mediocri risultati e possono lavorare solo su immagini in cui il disco
ottico risulti ben visibile, diversamente non esistono i presupposti per procedere ad una
identificazione. Il nostro sistema si comporta bene sia in condizioni normali del fundus oculare sia in condizioni patologiche in cui il disco ottico risulti celato. Inoltre il
modello risulta definito sull’intera area fotografica. Seppur basando la ricerca del disco
ottico sull’analisi delle strutture vascolari, questo non vincola alla obbligatoria presenza dei vasi in prossimità del disco. Il modello ha cioè il vantaggio di poter localizzare
la posizione del disco anche per estrapolazione non vincolando la presenza di vasi nella
zona sottostante i vertici delle parabole (5.11b). Questo è un grosso vantaggio soprattutto nei casi in cui patologie della retina celano quasi completamente i vasi prossimi
al nervo ottico (es:im0019 e im0021) o in situazioni in cui l’immagine retinica propone
solo una porzione visibile dell’intero disco (es:im0001 e im0003) o in altre ancora in
cui il disco è completamente assente (es:im0044). Altri ottimi risulatati si ottengono
in corrispondenza ad immagini sfocate (es:im0012 e im0013). Il sistema inoltre non
si lascia ingannare da cotton wools, che per forma e colore potrebbero essere scambiati per il disco ottico, tipico errore, questo, commesso dai sistemi che basano su tali
informazioni il loro funzionamento (es:im0036).
64
Risultati
Sparse Tracking Vessels4 Vessels4 Vessels2
peso del calibro
im0003
im0004
im0007
im0008
im0013
im0019
im0020
im0026
im0027
im0028
im0036
im0041
im0139
im0162
totale falliti
grado succeso
sì
sì
no
no
STARE
/
fallito
fallito
fallito
fallito
fallito
fallito
fallito
fallito
fallito
fallito
fallito
fallito
fallito
fallito
fallito
fallito
fallito
fallito
fallito
fallito
fallito
fallito
fallito
2
97,53%
2
97,53%
4
95,06%
7
91,36%
9
88,89%
Tabella 5.1: risultati conclusivi relativi alle sole immagini fallite da uno degli algoritmi
a G 0 H 00177
c1 G 253 H 68
c2 GJI 94 H 465
a G 0 H 00539
Figura 5.1: im0001 e im0003
c1 G 399 H 48
c2 GKI 135 H 39
5.1 Risultai del SA
a G 0 H 00225
c1 G 95 H 719
65
c2 GKI 195 H 29
a G 0 H 00952
c1 G 93 H 815
c2 GJI 144 H 66
c1 G 138 H 37
c2 GJI 108 H 77
Figura 5.2: im0004 e im0007
a G 0 H 002
c1 G 235 H 54
c2 GJI 299 H 04
a G 0 H 00545
Figura 5.3: im0012 e im0013
66
Risultati
a G 0 H 002
c1 G 238 H 54
c2 GKI 299 H 04
a G 0 H 00244
c1 G 399 H 26
c2 GKI 187 H 76
c1 G 157 H 07
c2 GKI 121 H 33
Figura 5.4: im0017 e im0018
a G 0 H 00523
c1 G 177 H 92
c2 GJI 245 H 84
a G 0 H 00275
Figura 5.5: im0019 e im0021
5.1 Risultai del SA
a G 0 H 00347
67
c1 G 193 H 49
c2 GKI 179 H 02
a G 0 H 000934
c1 G 24 H 4
Figura 5.6: im0034 e im0036
a G 0 H 00289
c1 G 217 H 2
c2 GKI 228 H 05
originale
Figura 5.7: im0044 e im0044 originale
c2 GJI 168 H 36
68
Risultati
a G 0 H 00363
c1 G 138 H 65
c2 GJI 26 H 268
a G 0 H 00099
Figura 5.8: im0081 e im0190
c1 G 98 H 656
c2 GKI 258 H 04
5.2 Limiti del modello
69
5.2 Limiti del modello
In fig.5.9a è possibile osservare una delle due immagini fallite dalla tecnica basata sullo
Sparse Tracking. I motivi del fallimento sono evidenti e non risolubili: le emorragie coprono quasi interamente l’immagine (rendendo inoltre invisibile il disco) e l’algoritmo
di Sparse Tracking non è stato in grado di fornire i dati su cui poter fittare il modello
matematico (specie nella zona sottostante il disco).
a) risultato fallito con 300 punti
b) e con 600 dati sperimentali
Figura 5.9: im0026 esaminata con i dati dello Sparse Tracking
−200
−100
0
100
200
300
400
500
600
a) risultato corretto
700
800
−101
0
b) dati sperimentali
100
200
300
400
500
600
Figura 5.10: im0026 esaminata con i dati dello STARE
In fig.5.9b abbiamo applicato l’algoritmo utilizzando 600 punti per il modello (il
700
800
70
Risultati
doppio di quelli usati per i test), il risultato migliora ma resta comunque lontano (anche
se non eccessivamente) da quello che sembra essere il punto di arrivo del nervo ottico.
In fig.5.10 si nota come la presenza delle emorragie sottostanti il disco, individuate
dallo STARE e interpretate come vasi, sia condizione sufficiente a correggere il risultato
di tale prova.
a) risultato errato
b) risultato corretto per estrapolazione
c) punti estratti Sparse Tracking
d) punti estratti STARE
Figura 5.11: im0041-soluzioni trovate
Nella im0041 (fig.5.11 a) il disco ottico è visibile solo in minima parte e manca la
simmetria tra il ramo superiore e inferiore del luogo Γ, viene cioè a mancare la base, fornita dai rami principali, per poter procedere all’identificazione di una parabola in modo
univoco. In questo caso l’uso di un processo a saturazione per la pesatura dei vasi (come
quella usata per le immagini binarie - fig.5.11 d) ha consentito alle numerose strutture
vascolari presenti nella zona superiore (a calibro ridotto) di compensare l’assenza di un
5.2 Limiti del modello
71
ramo a calibro dominante (fig.5.11 b). Ovviamente quest’ultima rappresenta davvero
una situazione limite, in cui la soluzione, anche se corretta, è frutto di una casualità
nell’estrazione di direzioni di strutture vascolari che in realtà non corrispondono ad
una esatto riconoscimento. Se messe a confronto le estrazioni condotte con lo Sparse
Tracking (fig.5.11 c) e quelle condotte sulle immagini binarie dello STARE (fig.5.11
d), per quanto entrambe non risultino soddisfacenti, quelle su cui il nostro algortimo
ha fallitto (quelle estratte con lo Sparse Tracking) sembrano decisamente più fedeli alle
strutture presenti nell’immagine.
a) originale
b) soluzione modello
c) vasie estratti dallo STARE
d) le 300 direzini estratte
Figura 5.12: im0008
Le immagini fallite dopo l’uso dell’algoritmo di estrazione vascolare dello STARE
sono visibili in fig.5.12 e fig.5.13. Nella prima, la im0008, il motivo del fallimento (in
blu in fig.5.12b) è derivato da un cattivo riconoscimento delle strutture vascolari poste
in prossimità del disco (sul lato sinistro in alto in fig.5.12c). Il disco ottico è localizzato
72
Risultati
in un minimo locale che il SA ha rintracciato in una delle sei realizzazione (in verde in
fig.5.12b ). La im0027 è stata fallita a causa della cattiva qualità dell’immagine, molto
scura nella parte inferirore, non ha permesso una corretta distribuzione simmetrica delle
strutture vascolari su cui fittare il modello.
a) originale
b) vasi estratti dallo STARE
Figura 5.13: im0027
Figura 5.14: fit del modello sulla im0027; la mancata simmetria nelle strutture
paraboliche ha causato il fallimento del rintracciamento
Capitolo 6
Conclusioni
Il modello matematico abbinato all’analisi automatica fornita dal SA si è dimostrato
robusto sotto ogni aspetto.
Su un totale variabile di punti, tra i 4300 e 7600 per ogni immagine binaria sottoposta all’operazione di thin, si è fatto uso di soli 300 punti confrontati col modello
matematico. Indice del fatto che anche usando meno del 7% del totale di punti disponibili, questo è piú che sufficiente a risolvere il problema della localizzazione del disco
ottico. Lo Sparse Tracking, non particolarmente adattato alle immagini del data set, è
comunque stato capace di rintracciare un totale di oltre 1000 punti per ogni immagine
elaborata. Allo stesso modo, anche per queste pre-elaborazioni, il nostro sistema ha
estratto in modo uniforme 300 punti.
Usando l’estrazione dei vasi fornita sotto forma di immagini binarie prodotte
dallo STARE con grado di estrazione 4 il nostro sistema e stato capace di risolvere
correttamente la posizione del dico ottico ben 79 volte sul totale di 81 immagini
retiniche. Nella funzione residui si è tenuto conto del calibro relativo dei vasi.
Lo stesso risultato lo si è ottenuto pre-elaborando le immagini originali (in for-
mato ppm da 700*605 punti) con lo Sparse Tracking. In questo caso nella funzione residui si è fatto uso del calibro dei vasi fornito dallo stesso algoritmo di
tracciamento.
Usando sempre le immagini binarie dello STARE im#-vessels4 ma stavolta senza
far uso di nessuna informazione sul calibro, il numero di rintracciamenti andati a
buon fine è stato di 77.
Con il data set delle im#-vessels2 senza alcun peso dato ai vasi il sistema ha
garantito un numero di risultati esatti su ben 74 immagini. Delle 7 immagini
74
Conclusioni
fallite solo 2 di esse hanno fornito una posizione decisamente lontana dalla reale
posizione del disco. Nelle altre 5, seppure errate, il sistema ha restituito una
posizione poco lontana dal bordo esterno del disco.
Dalla tabella 5.1 appare evidente l’ottimo risultato raggiunto in ogni situazione. Per
semplicità sono state elencate le sole immagini (sul totale di 81) che hanno prodotto
risultati errati con almeno uno degli algoritmi. Tutte le immagini non elencate sono
state risolte con successo da tutti gli algoritmi.
C’è da sottolineare anche un altro aspetto di natura matematica molto interessante.
Il fit tra modello e dati non è univoco, si possono cioè ottenere piú soluzioni per i
cinque parametri del modello pur ottenendo lo stesso valore dei residui. Tutte queste
soluzioni garantiscono comunque l’individuazione del disco ottico (le coordinate del
disco xod yod non mutano), ciò che cambia in queste soluzioni sono i valori dei
parametri a,c1 e c2 . La complessità del modello si riflette nella capacità di trovare
diverse realizzazioni per Γ che, combinate a differenti valori di c1 e c2 , comunque risolvono una buona quantità di direzioni vascolari. Questo spiega il perché in alcune
soluzioni trovate il luogo formato da Γ non coincida esattamente con le maggiori strutture vascolari. Questi sono i casi nei quali l’immagine pre-elaborata si presenta ricca
di vascolatura minore o di diversi vasi a calibro confrontabile. Γ in questi casi ha la
possibilità di appoggiarsi su una delle strutture importanti e giocare su c 1 e c2 al fine di
ottenere il miglior fit, oppure posizionarsi equidistante tra i vasi maggiori cercando di
ottenere il fit migliore su entrambi.
Sviluppi futuri
Sarebbe interessante poter capire cosa ha influito di piú nel determinare l’efficacia del
sistema tra:
1. “una piú precisa valutazione del calibro dei vasi” (quella usata dallo Sparse
Tracking),
2. “un assegnamento del peso dei vasi attraverso un processo a saturazione” (quello
usato sulle immagini pre-elaborate dallo STARE).
Approfondire le cause che determinano la natura estremamente oscillatoria della funzione residui, e se possibile, filtrandola, ottenerne una studiabile con algoritmi a gradiente molto piú veloci del SA.
75
Modificare il modello matematico (ad esempio anche solo per la seconda fase di
affinamento del processo di fit). Si è notato infatti come la determinazione del luogo
Γ attraverso il valore del parametri a xod yod ma specialmente per il parametro a, ne
obbliga l’adattamento alle piú importanti strutture vascolari in modo speculare rispetto
all’asse di simmetria delle parabole. Forse questo rappresenta una limitazione nelle
operazioni di minimizzazione della funzione costo.
Il modello evidenzia i propri limiti o quando vengono a mancare le strutture paraboliche nei dati o in condizioni di mancanza di simmetria sull’asse orizzontale nei dati
(che si è dimostrata essere la causa di alcuni fallimenti). La mancanza di simmetria
comporta la non univoca determinazione del luogo Γ. Molteplici possono essere infatti
le parabole con vertici in posizioni differenti e con differenti aperture che riescono
comunque a imitare abbastanza correttamente i dati appartenenti ad una solo ramo. Nei
casi di mancanza di simmetria orizzontale nei dati estratti si potrebbe sviluppare un
sistema che partendo da quelli presenti ne aggiunga altri per construzione simmetrica.
I risultati ottenuti potrebbero essere usati come punto di partenza per un nuovo
lavoro che abbia come scopo quello di determinare, ove sia visibile, la dimensione del
disco ottico, definendone il contorno e il centro geometrico esatto. Ovviamente sarà
necessario integrare informazioni non considerate nel lavoro attuale e svincolarsi dalla
relazione spaziale che sussiste tra le strutture vascolari e il centro geometrico esatto del
disco ottico.
76
Conclusioni
Elenco delle figure
1.1
occhio umano . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
1.2
la retina umana: dall’alto in basso, coni e bastoncelli; loro nuclei o
strato dei granuli interni (n.s.); strato plessiforme esterno (s.p.e.); strato
dei neuroni bipolari o dei granuli interni (n.b.); strato plessiforme interno (s.p.i.); strato delle cellule gangliari (n.g.); strato delle fibre ottiche
(f.o.);cellule orizzontali e emacrine in corrispondenza di s.p.e. e s.p.i . . 17
1.3
coni e bastocelli . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
1.4
impatto della luce sulla zona della Fovea . . . . . . . . . . . . . . . . . 19
1.5
vascolatura retinica: sono visibili il disco ottico sulla destra e la fovea
al centro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.1
alcune problematiche legate all’uso delle sole caratteristiche morfologiche e cromatiche del disco ottico . . . . . . . . . . . . . . . . . . . 26
2.2
luogo Γ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
2.3
luogo Γ sovrapposto all’immagine originale . . . . . . . . . . . . . . . 29
2.4
luogo Γ e direzioni fornite dal modello per i punti che non vi appartengono 30
2.5
funzione c con c1 10, c2 + 3 . . . . . . . . . . . . . . . . . . . . . 31
2.6
contributo della funzione d nei punti con medesima ascissa . . . . . . . 32
2.7
funzione modello al variare del parametro a . . . . . . . . . . . . . . . 33
2.8
modello fittato alla im0018 del dat set . . . . . . . . . . . . . . . . . . 34
2.9
modello al variare di c1 c2 2.10 modello con c1 c2 ; c1 . . . . . . . . . . . . . . . . . . . . . . 35
400 ; c2 40 . . . . . . . . . . . . . . . 36
3.1
i 10 livelli di estrazione dei vasi . . . . . . . . . . . . . . . . . . . . . 38
3.2
immagine pre-elaborata im003-vessels4 del data set dello STARE (in
blu i punti scelti) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
3.3
definizione della ROI attorno a xi yi . . . . . . . . . . . . . . . . . . 40
78
ELENCO DELLE FIGURE
3.4
3.5
direzioni estratte sovrapposte all’immagine originale e all’immagine
binaria pre-elaborata . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
tratto di vaso e dati associati . . . . . . . . . . . . . . . . . . . . . . . 41
3.6
confronto tra 600 punti estratti dai due sistemi (immagine: im0018 del
data set - punti e direzioni calcolate) . . . . . . . . . . . . . . . . . . . 43
3.7
3.8
3.9
differenze angolari: a) ∆ α β α β , b) ∆ α β J
α β π 8
. 44
insiemi di definizione per θi e θmi . . . . . . . . . . . . . . . . . . . . 44
funzione residui al variare delle sole componenti xod e yod . . . . . . . . 45
3.10 funzione residui al variare del parametro a 0. . . . . . . . . . . . . . 46
3.11 andamento dei residui al variare di c1 e c2 . . . . . . . . . . . . . . . . . 47
4.1
4.2
4.3
criterio di accettazione degli stati . . . . . . . . . . . . . . . . . . . . . 52
Implementazione algoritmica generale del Simulated Annealing . . . . 53
funzione randn: realizzazione di moto casuale. . . . . . . . . . . . . . 54
4.4
4.5
analisi visiva dei residui e alcune sezioni per l’im0003 del data set . . . 55
plot dei residui, il minimo indica la posizione del disco ottico . . . . . . 57
4.6
4.7
4.8
importanza dei parametri c1 e c2 in condizioni limite . . . . . . . . . . 61
le sei realizzazioni del SA . . . . . . . . . . . . . . . . . . . . . . . . . 62
dettaglio della ricerca fine del SA partendo dal sub-ottimo trovato alla
fine della prima fase . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
5.1
im0001 e im0003 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
5.2
5.3
5.4
im0004 e im0007 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
im0012 e im0013 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
im0017 e im0018 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
5.5
5.6
im0019 e im0021 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
im0034 e im0036 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
5.7
5.8
5.9
im0044 e im0044 originale . . . . . . . . . . . . . . . . . . . . . . . . 67
im0081 e im0190 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
im0026 esaminata con i dati dello Sparse Tracking . . . . . . . . . . . 69
5.10 im0026 esaminata con i dati dello STARE . . . . . . . . . . . . . . . . 69
5.11 im0041-soluzioni trovate . . . . . . . . . . . . . . . . . . . . . . . . . 70
5.12 im0008 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
5.13 im0027 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
5.14 fit del modello sulla im0027; la mancata simmetria nelle strutture paraboliche
ha causato il fallimento del rintracciamento . . . . . . . . . . . . . . . 72
Bibliografia
[1] S.Piermarocchi F.Moro, ATLANTE A C OLORI D EL F ONDO D ELL’O CCHIO
N ELLA M ALATTIA I PERTENSIVA. Addison Wesley, Italy, 1999.
[2] E.Padoa, M ANUALE D I A NATOMIA C OMPARATA D EI V ERTEBRATI, Feltrinelli,
1990.
[3] R.M.Berne, M.N.Levy, F ISIOLOGIA, Casa Editrice Ambrosiana, 1998.
[4] C.Sinthanayothin, J.Boice, C.T.Williamson, AUTOMATED L OCALISATION O F
T HE O PTIC D ISC , F OVEA , A ND R ETINAL B LOOD V ESSELS F ROM D IG ITAL C OLOUR F UNDUS I MAGES, British Journal of Ophtalmology, vol.38,
pp.902-910, 1999.
[5] H. Li, O.Chutatape, School of Electrical and Electronic Engineering, Nanyang
Technological University, AUTOMATIC L OCATION O F O PTIC D ISK I N
R ETINAL I MAGES. , IEEE ICIP, 0-7803-6725-1, Vol.2, pp.837-840, 2001.
[6] O.Chutatape, H.Li, School of EEE, Nanyang Tecnological University, Singapore, O CULA F UNDUS C OORDINATE E STABLISHMENT, Proc. of the Second
Joint EMBS/BMES Conference, Huston, TX, USA, October 23-26, 0-7803-7612,
pp.2141-2142, 2002 IEEE.
[7] Retinopathty Working Party, A P ROTOCOL F OR S CREENING F OR D IABETIC
R ETINOPATHY I N E UROPE, Diabetic Med., No.8, pp.263-270,1991.
[8] H.Li, O.Chutatape, F UNDUS I MAGE F EATURES E XTRACTION . 0-7803-6465-1
IEEE, Proceedings of the 22nd Annual EMBS International Conference, pp.30713073, July 23-28, 2000, Chicago.
[9] Z. Liu, C. Opas, S.M. Krishnan, AUTOMATIC I MAGE A NALISYS
OF
F UN -
P HOTOGRAPH Nanyang Tecnological University, School of Electrical and
Electronic Engineering.
DUS
80
BIBLIOGRAFIA
[10] J. Gutièrrez, I. Epifanio, E. De Ves, F.J. Ferri, A N ACTIVE C OUNTOUR
M ODEL FOR THE AUTOMATIC D ETECTION OF F OVEA IN F LUORESCEINT
A NGIOGRAPHIES Universitat de València, Depertament d’Informatica.
[11] C.M. Bishop, N EURAL N ETWORKS
University Press, United States, 2000.
FOR
PATTERN R ECOGNITION. Oxford
[12] A. Cavallo, R. Setola, F. Vasca, G UIDA O PERATIVA
C ONTROL TOOLBOX. Liguori Editore, Italia, 1997.
AL
M ATLAB S IMULINK
E
[13] K.Sigmon, M ATLAB P RIMER T HIRD E DITION. Department of Mathematics
University of Florida, 1993.
[14] A. Della Libera. A LGORITMI PER IL R ICONOSCIMENTO E LA C LASSIFI CAZIONE DI S EGNI PATOLOGICI IN I MMAGINI DEL F UNDUS O CULARE. Master’s thesis, Univerità di Padova, Dipartimento di Elettronica ed Informatica,
2001.
[15] M. Mazzetto. A LGORITMI PER L’E STRAZIONE DI PARAMETRI D IAGNOSTICI
IN I MMAGINI DEL F UNDUS O CULARE. Master’s thesis, Univerità di Padova,
Dipartimento di Elettronica ed Informatica, 2001.
[16] M.Scarperi, U N N UOVO A LGORITMO P ER L’I DENTIFICAZIONE D EL D ISCO
OTTICO I N I MMAGINI D ELLA R ETINA, Università di Padova, Dipartimento di
Elettronica e Informatica, 2001.
[17] G.Naldi, L.Pareschi, M ATLAB C ONCETTI E P ROGETTI. Apogeo, 2002.
[18] M.S.Gockenbach, A P RACTICAL I NTRODUCTION TO M ATLAB (ver 5) sept.
1999.
[19] M.Baudoin, I MPARA L ATEX ! (... E
Supérieure de Techniques Avancées.
METTILO DA PARTE ),
École Nationale
[20] S.Kirkpatrick, C.D.Gelatt, Jr.,M.P.Vecchi. O PTIMIZATION B Y S IMULATED
A NNEALING, Science 13 May 1983, Vol.220, No.4598.
[21] M.Goldbaum, S.Moezzi, A.Taylor, S.Chatterje, J.Boyd, E.Hunter, R.Jain, Department of Ophthalmology and Department of Engineering and Computer Science
BIBLIOGRAFIA
81
University of California, AUTOMATED D IAGNOSIS A ND I MAGE U NDERSTAND ING W ITH O BJECT E XTRACTION , O BJECT C LASSIFICATION , A ND I NTERFER ENCING I N R ETINAL I MAGES, In the Proceedings of the IEEE International
Conference on Image Processing, pp.695-698, 1996.
[22] M.Goldbaum, A.Hoover, F UZZY C ONVERGENCE,
Proceeding of IEEE
Conference on computer Vision and Pattern Recognition, pp.716-721, 1998.
[23] STARE project website, http://www.ces.clemson.edu/~ahoover/stare
[24] A.Hoover, V.Kouznetsova, M.Goldbaum, L OCATING B LOOD V ESSELS I N R ETI NAL I MAGES
B Y P IECE - WISE T HRESHOLD P ROBING O F A M ATCHED F ILTER
R ESPONSE, 0278-0062, IEEE Transactions on Medical Imaging, vol.19, no. 3,
pp.203-210, 2000.
[25] A.Hoover, M.Goldbaum, L OCATING T HE O PTIC N ERVE I N A R ETINAL I M AGE U SING T HE F UZZY C ONVERGENCE O F T HE B LOOD V ESSELS, IEEE
Transactions on Medical Imaging, sept. 2001.
[26] N.Katz, M.Goldbaum, M.Nelson, LR.Hart, T HE D ISCRIMINATION OF S IM ILARY C OLORED O BJECTS IN C OMPUTER I MAGES O F O CULAR F UNDUS,
Invest. Ophthal. & Vis. Sci., Vol.31,No.4, pp.617-627, 1990.
[27] N.Katz, M.Goldbaum, et al., A N I MAGE P ROCESSING S YSTEM F OR
AUTOMATIC R ETINA D IAGNOSIS, SPIE, Vol.902, 1998.
[28] M.Goldbaum, N.Katz, S.Chaundhuri, M.Nelson, I MAGE U NDERSTANDING F OR
AUTOMATED R ETINAL D IAGNOSIS, Proc.The Thirteenth Annual Symposium on
Computer Applications in Medical Care, pp.756-760, 1989.
[29] S.Chaudhuri, S.Chatterjee, N.Katz, M.Goldbaum, AUTOMATIC D ETECTION O F
T HE O PTIC N ERVE I N R ETINAL I MAGES, Proc. IEEE International Conference
on Image Processing, Singapore, Vol.1,pp.1-5,1989.
[30] S.Chaudhuri, S.Chatterjee, N.Katz, M.Nelson, M.Goldbaum, D ETECTION
O F B LOOD V ESSELS I N R ETINAL I MAGES U SING T WO -D IMENSIONAL
M ATCHED F ILTERS, IEEE Trans. Med. Imag., Vol.3. pp.263-269, 1989.
[31] K.G.Goh, W.Hsu, M.L.Lee, H.Wang, ADRIS:A N D UTOMATIC D IABETR ETINAL I MAGE S CREENING S YSTEM, School of Computing National
University of Singapore, 2001.
IC
82
BIBLIOGRAFIA
[32] K.G.Goh, W.Hsu, M.L.Lee, AUTOMATIC D IABETIC R ETINAL I MAGE S CREEN ING U SING I MAGE P ROCESSING A ND M ACHINE L EARNING A LGORITHMS ,
Medical Imaging 2000, SPIE, Feb 2000, California, USA.
[33] M.Lalonde, M.Bealieu, L.Gagnon, Centre de Recherche Informatique de Montréal (Québec). FAST A ND ROBUST O PTIC D ISK D ETECTION U SING P YRA D EOCOMPOSITION A ND H AUSDORFF - BASED T EMPLATE M ATCHING,
IEEE Transaction On Medical Imaging, Vol.20, No.11, pp.1193-1200, 2001
MIDAL
[34] L.Gagnon, M.Lalonde, M.Beaulieu, M-C.Boucher, P ROCEDURE TO D E TECT A NATOMICAL S TRUCTURES I N O PTICAL FUNDUS I MAGES, Computer
Research Institute of Montreal, http://www.crim.ca
[35] S.Moins, Linköping Institute of Tecnology, I MPLEMENTATION O F A S IMU LATED
A NNEALING A LGORITHM F OR M ATLAB, 2002, http://www.ep.liu.
se/
[36] M.Salmeri, A.Mencattini, S.Bertazzoni. S INTESI
E
S IMULAZIONE
DI
S ISTEMI
E LETTRONICI . Dipartimento di Ingegneria Elettronica dell’Univeristà di Roma
Tor Vergata, A.A. 2002-2003.http://micro.eln.uniroma2.it
[37] Y.Tolias, S.Panas, A F UZZY V ESSEL T RACKING A LGORITHM F OR R ETINAL
I MAGES BASED O N F UZZY C LUSTERING, in IEEE Trans. on Medical Imaging,
vol. 17, no. 2, pp.263-273, 1998.
[38] A.Osareh, M.Mirmehdi, B.Thomas, R.Markham, M ORPHOLOGY A ND S NAKE
F OR O PTIC D ISC L OCALISATION, Department of Computer Science, University
of Bristol, http://www.cs.bris.ac.uk/Tools/Reports/Ps/.
[39] A.Osareh, M.Mirmehdi, B.Thomas, R.Markham, C LASSIFICATION A ND L O CALISATION O F D IABETIC -R ELATED E YE D ISEASE, ECCV 2002, LNCS 2353,
pp.502-516, 2002.
[40] A.Osareh, M.Mirmehdi, B.Thomas, R.Markham, C OMPARISON O F C OLOUR
S PACES F OR O PTIC D ISC L OCALISATION I N R ETINAL I MAGES, http://www.
cs.bris.ac.uk/Tools/Reports/Ps/
[41] A.Osareh, M.Mirmehdi, B.Thomas, R.Markham, AUTOMATIC R ECOGNITION
O F E XUDATIVE M ACULOPATHY U SING F UZZY C-M EANS C LUSTERING A ND
N EURAL N ETWORKS , BMVA Press, pp 49-52, 2001.
BIBLIOGRAFIA
83
[42] P.H.Gregson, Z.Shen, R.C.Scott, V.Kozousek, AUTOMATED G RADING O F
V ENOUS B EADING, Computers and Biomedical Research 28, 291-304, 1995.
[43] L.Gang, O.Chutatape, S.M.Krishman, D ETECTION A ND M EASUREMENT
O F R ETINAL V ESSELS I N F UNDUS I MAGES U SING A MPLITUDE M ODI FIED S ECOND -O RDER G AUSSIAN F ILTER, 0018-9294, IEEE Transaction on
Biomedical Engineering, Vol.49, No.2, pp.168-172, 2002.
[44] F.Zana, J.-C.Klein, S EGMENTATION O F V ESSEL -L IKE PATTERNS U SING
M ATHEMATICAL M ORPHOLOGY A ND C URVATURE E VALUATION, IEEE
Transaction On Image Processing, Vol.10, No.7, pp.1010-1019, 2001.
[45] F.Mendels, C.Heneghan, P.D.Harper, R.B.Reilly, J.-P.Thiran, E XTRACTION O F
T HE O PTIC D ISK B OUNDARY I N
EMBS 1999 Conference, Atlanta.
DIGITAL
F UNDUS I MAGES, Submitted IEEE-
[46] F.Mendels, C.Heneghan, J.-P.Thiran, I DENTICATION O F T HE O PTIC D ISC
B OUNDARY I N RETINAL IMAGES U SING ACTIVE C ONTOURS, Proc. IMVIP
Conference, pp.103-115, 1999.
[47] S.Shiffman, G.D.Rubin, S.Napel, M EDICAL I MAGE S EGMENTATION U SING
A NALYSIS O F I SOLABLE -C ONTOUR M APS, IEEE Transactions On Medical
Imaging, Vol.19, No.11, 2000.
[48] N.Metropolis, A.W.Rosenbluth, A.H.Teller, E.Teller, E QUATION OF S TATE C AL CULATIONS BY FAST C OMPUTING M ACHINES, Journal of Chemical Phisics,
vol. 21, pp. 1087–92