URTI CENTRALI ELASTICI E ANELASTICI
INTRODUZIONE
Si consideri un carrello libero di muoversi lungo una rotaia piana. Se il carrello viene
spinto a mano e poi lasciato percorrerà la rotaia di moto rettilineo uniforme. Se alla
fine della rotaia si trova una parete fissa avrà luogo un urto che potrà essere di tipo
elastico,parzialmente anelastico o totalmente anelastico, a seconda del tipo di carrello
e del tipo di parete incontrata.
L’eventuale presenza di attriti può rallentare il moto del carrello.
Per poter studiare il moto del carrello e la sua energia cinetica è necessario poter
misurare istante per istante posizione e velocità dello stesso.
Con l’apparato a disposizione ciò è possibile grazie ad un sensore di moto, posto ad
un estremo della rotaia.
Dal teorema dell’impulso sappiamo che la variazione di quantità di moto del carrello
durante l’urto uguaglia l’impulso della forza impressa dal carrello al respingente
contro cui urta. Un sensore di forza collegato al respingente permette di misurare tale
forza e quindi verificare la validità del teorema dell’impulso nel caso in esame.
DESCRIZIONE APPARATO
L'apparecchiatura a disposizione consiste di una rotaia su cui si muove un carrello,
di un sensore di posizione a ultrasuoni, che misura a intervalli di tempo
predeterminati la distanza a cui si trova il carrello dal sensore stesso e di un sensore
di forza piezoresistivo, fissato all’altra estremità della rotaia. Tale sensore viene
collegato a differenti tipi di respingenti: una coppia di magneti, due molle di diversa
costante elastica, gomma, plastilina, allo scopo di simulare diversi tipi di urti:
elastico, anelastico, totalmente anelastico.
I sensori di posizione e di forza sono letti mediante un'interfaccia che comunica i dati
al calcolatore. Il programma DataStudio permette di acquisire e analizzare i dati
provenienti dall’interfaccia.
Tramite il sensore di posizione si misura la posizione x(t) del carrello in funzione
del tempo, inoltre calcolando le derivate numeriche, si possono avere anche la
velocità v(t) e l’accelerazione a(t). Avendo precedentemente pesato il carrello, si
possono ricavare la quantità di moto e l’energia cinetica.
Tramite il sensore di forza si misura la forza F(t) esercitata dal carrello sul
respingente in funzione del tempo. La forza è di tipo impulsivo, valutando l’integrale
della forza tra l’istante iniziale t1 e quello finale t2, si ricava l’impulso
I
t2
t1
F (t )dt
Laboratorio I, Corso di Laurea in Fisica 2010 – M.Calvi
1
SVOLGIMENTO DELL’ESPERIENZA
Scopo dell’esperienza è realizzare diversi tipi di urto tra il carrello e tipi di
respingenti diversi, variando inoltre la massa del carrello e la sua velocità iniziale. Per
ciascuno di essi si studia il moto del carrello e l’urto. Si misurano la quantità di moto
iniziale e finale del carrello, la durata dell’urto, l’impulso della forza, la variazione
dell’energia cinetica ecc. e si verifica se:
1. vale il teorema dell’impulso
2. si ha conservazione dell’energia cinetica.
3. Nel caso in cui si utilizzi come respingente una molla si può determinare la
costante elastica k della molla dal grafico della forza F in funzione dello
spostamento x. Poiché la x misurata rappresenta la distanza del carrello dal sensore
di posizione, detta xm la distanza corrispondente alla posizione di contatto con la
molla ancora non compressa, si ha: |F|= k ( x xm ) per x ≥ xm .
Calcolare la massima energia potenziale acquistata dalla molla e verificare se
nell’urto si ha conservazione dell’energia meccanica.
Si ponga attenzione alla scelta delle frequenze di campionamento dei due sensori che
deve permettere di ottenere un numero sufficiente di punti (F, x) durante l’urto.
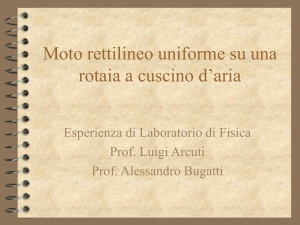
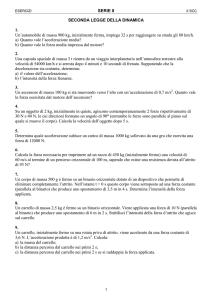
L'apparecchiatura utilizzata è schematizzata in figura.
Computer
Interfaccia "500"
Comunicazione
seriale
Sensore di posizione
Sensore di
forza
Rotaia
Carrello
OSSERVAZIONI
- Per poter verificare la validità del teorema dell’impulso è necessario stimare la
precisione con cui sono stati misurati gli impulsi e le quantità di moto. Valutare gli
errori relativi agli strumenti usati e alla procedura utilizzata (es. scelta dei tempi t 1 e t2
a cui sono stati valutate le quantità di moto, la procedura usata per effettuare
l’integrale della forza, la stabilità della rotaia ecc.).
Che ruolo ha l’attrito del carrello sulla rotaia? Come può essere valutato?
Che importanza ha la calibrazione del sensore di posizione? E’ possibile verificarla?
Laboratorio I, Corso di Laurea in Fisica 2010 – M.Calvi
2
NOTE TECNICHE:
I sensori di posizione e di forza sono letti mediante un'interfaccia che comunica i
dati al calcolatore tramite la porta seriale. Per avviare il programma di acquisizione
far partire Windows e cliccare due volte sull’icona di Data Studio. Definire i valori
iniziali per la frequenza e la durata della lettura dei sensori: circa 1000 misure di
forza al secondo (1 kHz) e 50 misure di posizione al secondo (50 Hz), per una durata
di 2.5 secondi.
Nota: l'interfaccia è collegata al computer via porta seriale, il che consente di trasmettere sino a
500 dati/s. Utilizzando frequenze più elevate, come nel nostro caso, i dati vengono memorizzati
dall'interfaccia nel suo buffer interno, e trasmessi al computer più lentamente. Quindi la raccolta
dati pare durare più dei 2.5 secondi impostati, perché gli ultimi istanti sono solo di trasmissione.
Ogni raccolta dati viene eseguita nel seguente modo:
1. Montare sul sensore di forza il tipo di respingente scelto.
2. Premere il tasto "tare" sul fianco del sensore di forza (il tastino è chiaramente
visibile sullo stesso lato del sensore da cui parte il filo di collegamento
all'interfaccia) per azzerare la misura della forza.
3. Posizionare il carrello sulla rotaia rispettando la minima distanza dal sensore di
posizione prevista (il sensore inizia a funzionare quando l’ostacolo è ad una
distanza superiore a circa 15 cm.).
4. Lanciare il carrello e contemporaneamente fare partire la raccolta dati con la
combinazione di tasti Alt+R o con il mouse.
Salvare periodicamente le raccolte dati in un file mediante l’opzione Save As … del
menu File per poterle poi copiare su un dischetto. (Non accumulare più di 10-20
raccolte, altrimenti la copia può risultare impossibile).
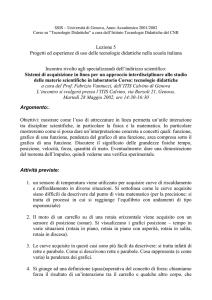
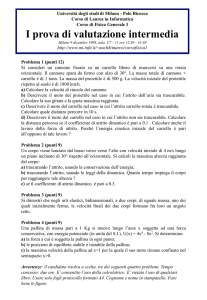
Nota. Oltre alle grandezza misurate direttamente dai sensori il Calcolatore consente di creare
nuove grandezze. Nella figura, ad esempio, vediamo la definizione dell'energia cinetica del
carrello.
Si è letteralmente "scritta" la definizione: 1/2,
moltiplicato per la massa del carrello in Kg (0.5,
dato inserito dall'utente) moltiplicato per la
velocità al quadrato (dato ottenuto dal software
dalle misure di distanza; la velocità si trova dalla
lista INPUT su calcolatore). Una volta definita
una nuova grandezza il software può elaborarne
grafici, tabelle, combinarla ulteriormente per
ottenerne un'altra, ecc
Laboratorio I, Corso di Laurea in Fisica 2010 – M.Calvi
3
STUDIO DELLE FORZE D’ATTRITO DAL MOTO
DI UN GRAVE LUNGO UN PIANO INCLINATO
INTRODUZIONE
La rotaia piana a disposizione è imperniata ad un’estremità e inclinabile, il sensore di
posizione va montato sull’estremità mobile della rotaia. In prossimità dell’estremità
imperniata si possono inserire i diversi respingenti: un magnete e una molla.
L’inclinazione della rotaia è regolabile per mezzo di un’asta filettata.
Il moto del carrello sulla rotaia è soggetto a forze d’attrito che ci si propone di
studiare e misurare. Per un generico angolo di inclinazione del piano della rotaia, la
forza che agisce sul carrello di massa m, nella direzione del piano, è data da:
F = m a = m g sen
- A,
dove A rappresenta la somma delle forze di attrito che intervengono nel moto.
Quando il carrello è immobile si presenta la situazione di attrito puramente statico
tra ruote e rotaia. In questo caso la forza di attrito si può esprimere come:
A=
s
m g cos
ovvero proporzionale alla componente della forza peso ortogonale al piano della
rotaia. Il coefficiente di proporzionalità s, detto coefficiente di attrito statico,
dipende in maniera estremamente complessa e dalle due superfici in contatto
(materiale, forma, temperatura, rugosità, pulizia).
Se il carrello scivola lungo la rotaia senza che ci sia rotolamento delle ruote, il
moto di gravità è ostacolato dall’attrito dinamico tra le ruote e le rotaie e dall’attrito
viscoso tra il carrello e l’aria.
Trascurando la resistenza dell’aria, ipotesi plausibile per piccole velocità di
traslazione e piccola sezione nel piano ortogonale al moto, A ha di nuovo la forma:
A=
d
m g cos
dove d prende il nome di coefficiente di attrito dinamico ed il suo valore è in
generale diverso da quello di s.
Nel caso generale in cui le ruote siano libere di rotolare, il moto del carrello è
soggetto ad attrito volvente tra ruote e rotaie ed attrito dinamico tra asse delle ruote e
Laboratorio I, Corso di Laurea in Fisica 2010 – M.Calvi
4
innesto dell’asse sul corpo del carrello (sempre trascurando l’attrito viscoso tra
carrello e aria).
L’attrito volvente si manifesta come una coppia di forze che agisce su ogni ruota
ed il cui momento ha la forma:
M = b m’ g
dove b, è il coefficiente di attrito volvente e m’g = ¼ m g è la forza peso che
agisce su ogni ruota.
L’attrito dinamico tra asse delle ruote e innesto sul carrello ha la stessa dipendenza
da peso e inclinazione del precedente, anche se ovviamente non c’è motivo che i
coefficienti siano gli stessi.
PROCEDURA SPERIMENTALE
1. Cercare con l’aiuto della livella a bolla la condizione di orizzontalità della rotaia e
posizionarvi il carrello con le ruote bloccate.
Stimare il valore del coefficiente di attrito statico s ed il suo errore dall’inclinazione
minima per cui il carrello comincia a scivolare lungo la rotaia.
In questa configurazione si ha che
a = g sen
s
g cos
Per a minima, ovvero prossima a zero, si ha:
s
= tan
Aggiungendo progressivamente dei pesi sul carrello si verifichi l’indipendenza di s
dal carico del carrello.
2. Si blocchino le ruote del carrello e lo si lasci libero di scivolare lungo il piano
inclinato fino ad essere respinto sul fondo dal magnete o dalla molla.
In questo caso il moto del carrello avverrà con accelerazione di modulo:
a1 = g sen
d
g cos
a2 = g sen
d
g cos
in discesa e:
in salita.
Utilizzare il sensore di posizione per misurare l’accelerazione del carrello.
Dal confronto della legge oraria nel moto di salita e di discesa si ricavi il coefficiente
di attrito d ed il suo errore. Si verifichi l’invarianza del coefficiente di attrito dalla
pendenza del piano inclinato e dalla massa del carrello.
Laboratorio I, Corso di Laurea in Fisica 2010 – M.Calvi
5
3. Si lascino ora le ruote libere di rotolare e si ripetano le misure.
Misurare in quest’ultimo caso la forza d’attrito agente sul carrello e studiarne la
dipendenza dal carico e dall’inclinazione della rotaia.
Verificare che è ben riprodotta la forma funzionale dell’attrito dinamico, il che
suggerisce che questo sia la causa dominante di dissipazione di energia meccanica. A
questo scopo definiamo una forza di attrito:
A=
eff
m g cos
dove chiamiamo eff il coefficiente di attrito efficace complessivo. Stimare il valore
di eff ed il suo errore.
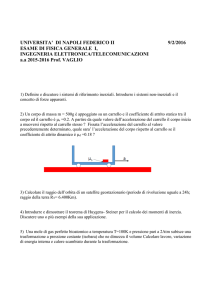
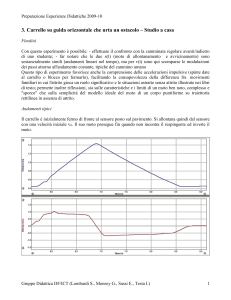
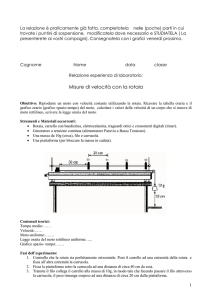
In figura 1 è mostrata la dipendenza temporale della posizione del carrello sul piano
inclinato; si tenga presente che nella configurazione utilizzata il sensore di posizione
è posto in cima al carrello.
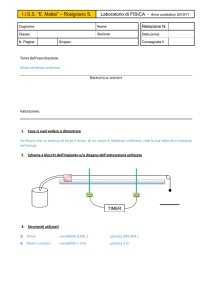
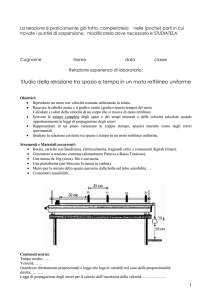
In figura 2, per lo stesso moto, è rappresentata l’evoluzione temporale della velocità.
0.50
0.55
0.60
0.65
Raccolta n°3
P osizione (m )
0.70
0.75
0.80
0.85
Grafico2
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
Figura 1
Tempo (s)
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
Rac c olta n°3
V eloc ità (m /s )
-0.0
0.1
0.2
0.3
0.4
0.5
0.6
Grafico2
0
2
4
6
8
10
12
14
16
18
20
22
24
26
28
30
32
Tempo (s)
Laboratorio I, Corso di Laurea in Fisica 2010 – M.Calvi
34
36
38
40
42
44
46
48
Figura 2
6