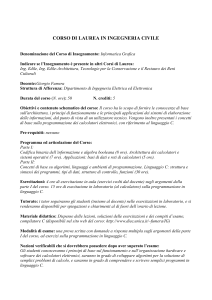
Struttura dei calcolatori
Organizzazione di un semplice calcolatore
• CPU (Unità centrale di
elaborazione)
• Memoria principale
• Dispositivi ingresso
• Dispositivi uscita
• Bus
Calcolatori Elettronici, Beraldi, aa 03/04
Organizzazione di un semplice calcolatore
•
La CPU è composta da un’unita di
controllo, un insieme di registri ed una
ALU
– Un registro è un dispositivo in grado di
memorizzare gruppi di bit di dimensione
fissa (es 16,32 bit)
•
Registri speciali:
– PC: indirizzo dell’istruzione corrente
– IR: contiene l’istruzione corrente
– A: Contiene il risultato o un operando
dell’operazione corrente
•
La memoria principale contiene sia i
dati che le istruzioni
– La memoria è un dispositivo in grado di
memorizzare diversi gruppi di bit (parole
di memoria)
•
Calcolatori Elettronici, Beraldi, aa 03/04
I dispositivi per l’ingresso e l’uscita
(I/O) producono o ricevono dati da ( o
verso) l’esterno
Organizzazione della CPU: il data-path
• Il data-path è la parte della
CPU che contiene la ALU con
con i suoi input ed output
• La ALU esegue operazioni
aritmetiche o logiche sui dati
contenuti nei suoi registri
d’ingresso e memorizza il
risultato nel registro d’uscita
• Ciclo del data-path: passaggio
di due operandi attraverso la
ALU e memorizzazione del
risultato
Calcolatori Elettronici, Beraldi, aa 03/04
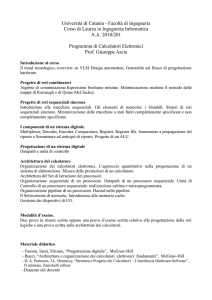
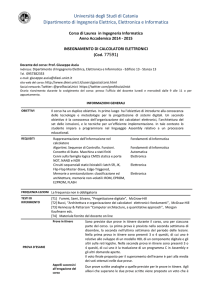
Ciclo istruzione
Fetch Istruzione
PC
100
IR
ADD R3,R5,R0
CPU
Memoria
Indirizzo
ADD R3,R5,R0
100
.
.
CU
IP Memoria[PC]
PC PC+1
Calcolatori Elettronici, Beraldi, aa 03/04
Ciclo istruzione
Decodifica
Indirizzo
PC
101
IR
ADD R3,R5,R0
ADD R3,R5,R0
.
.
CU
Calcolatori Elettronici, Beraldi, aa 03/04
100
Ciclo istruzione
esecuzione
Indirizzo
PC
101
IR
ADD R3,R5,R0
ADD R3,R5,R0
100
.
.
CU
INPUT1 R3
INPUT2 R5
ALU.Somma
R0 OUPUT
Calcolatori Elettronici, Beraldi, aa 03/04
Ciclo Istruzione
1.
2.
3.
4.
5.
6.
7.
Preleva l’istruzione seguente dalla memoria e copiala nel registro
istruzioni (fetch)
Cambia il program counter per indicare l’istruzione seguente
Determina il tipo di istruzione letta (fase di decodifica)
Se l’istruzione usa una parola di memoria determina dove si trova
(l’indirizzo)
Se necessario copiala in un registro della CPU (fetch operandi)
Esegui l’istruzione (fase di execute)
Torna al punto 1
Calcolatori Elettronici, Beraldi, aa 03/04
Segnale di sincronizzazione (clock)
• E’ un segnale con le seguenti caratteristiche:
– E’ un segnale binario
– E’ un segnale periodico (durata T), ossia frequenza f=1/T
– Può essere asimmetrico: La durata del livello basso (clock LOW pulse width)
diversa da quella del livello alto (clock HIGH pulse width)
Fronte di discesa (transizione negativa)
1
0
Fronte di salita
(transizione positiva)
nella realtà le transizioni 0
Periodo T
1 e 10 non sono istantanee
Calcolatori Elettronici, Beraldi, aa 03/04
Segnale di sincronizzazione (clock)
•
Le varie attività della CPU hanno inizio in corrispondenza di tempi ben precisi
stabiliti del clock
•
In generale completare un’istruzione richiede più “colpi” di clock, tale grandezza
si chiama Clock Per Instruction (CPI)
•
Con la tecnologia attuale la frequenza del clock della CPU è dell’ordine dei GHz
(1GHz = 109
T= 1ns)
– Es Pentium IV 3.4 GHz
•
Ipotizzando 4 CPI in media, una CPU con f=1GHz ha ¼ x 109=0,25 x 103 x
106=250 Mips
– Come effettuare la media? Non tutte le istruzioni sono eseguite con la stessa
frequenza…
Calcolatori Elettronici, Beraldi, aa 03/04
Esempio
•
•
•
Ammettiamo che il caricamento dei registri d’ingresso (copia del contenuto dei
registri generici in quelli d’ingresso) richieda 5 ns (1ns=10-9s), l’elaborazione
della ALU 10 ns e la memorizzazione del risultato nel registro di uscita 5ns
La ALU completerà un’operazione in 5+10+5 ns = 20 ns
Il numero massimo di operazioni (di questo tipo) che possono essere eseguite in
un secondo vale 1/20ns = 0,05 x 109 = 50 MIPS (Milioni di operazioni al
secondo)
– Trascurando la fase di fetch…
•
•
Il MIPS è una metrica per misurare la velocità di esecuzione di una CPU, anche se poco
impiegata in pratica.
Le prestazioni di una CPU sono invece comunemente espresse misurando il tempo di
esecuzione di programmi di test (benchmark). Vedi http: http:// www.spec.org
Calcolatori Elettronici, Beraldi, aa 03/04
Esempio
Temporizzazioni
INPUT1 R3
INPUT2 R5
ALU.Somma
R0 OUTPUT
5 ns
•
Nell’esempio precedente si può immaginare che la CPU riceva un segnale di
clock con frequenza 1/5 ns = 0,2 x 109 = 200 MHz. L’istruzione è caratterizzata
da CPI=4
Calcolatori Elettronici, Beraldi, aa 03/04
Esercizio
• Un programma P viene eseguito in 10 sec. sul un calcolatore A con
fA=400MHz. Ammettendo di poter costruire un calcolatore B con
frequenza di clock fB maggiore di quella di A, ma con un numero di cicli
per istruzione maggiore del 20%, quale valore deve avere fB affinchè P
termini in 6 sec ?
Calcolatori Elettronici, Beraldi, aa 03/04
Soluzione
CPIA
10 s
•
•
fA x TA = # colpi di clock
fA x TA / CPIA = # istruzioni
•
fA x TA / CPIA = fB x TB / (1.2)xCPIA
•
fB = fA x TA/TB x 1.20 = 400 x 10/6 x 1.20 = 800 MHz
Calcolatori Elettronici, Beraldi, aa 03/04
Evoluzione dei criteri di realizzazione di CPU
•
•
Inizialmente il set d’istruzioni dei calcolatori era composto da poche istruzioni
“semplici” (eseguibili in pochi cicli di clock)
Il set fu presto aumentato includendo istruzioni “complesse”
– ad esempio operazioni floating point
•
Disporre di istruzioni complesse direttamente eseguite in hw spesso comporta un
aumento delle prestazioni poiché è possibile eseguire più attività in parallelo
•
Negli anni 50, per garantire compatibilità fra modelli di calcolatori con
costo/prestazioni differenti, l’IBM introduce la tecnica dell’esecuzione mediante
interpretazione
•
Due calcolatori sono compatibili se hanno lo stesso set di istruzioni
– Modello fascia alta esecuzione diretta (+ prestazioni, + costo)
– Modello fascia bassa esecuzione interpretata (-prestazioni, -costo)
Calcolatori Elettronici, Beraldi, aa 03/04
Macchine CISC
Complex Instruction Set Computer
• Filosofia anni ’70-’80
• Repertorio esteso di istruzioni per facilitare la programmazione
– Lunghezza delle istruzioni variabile con decodifica complessa… (il significato
di un campo dipende dal valore dei campi precedenti)
• Spostare funzionalità “dentro” la CPU
–
L’interprete è un microprogrmma (insieme microistruzioni) memorizzato in
memorie veloci, dette control store
• Ad esempio il VAX aveva più di 200 istruzioni
– Il set d’istruzioni venne progettato considerando esecuzione interpretata. La
realizzazione di hw per l’esecuzione diretta divenne difficile
• Anche i primi microprocessori erano macchine CISC (Motorola 68000)
Calcolatori Elettronici, Beraldi, aa 03/04
Macchine CISC
Un esempio numerico
• Ammettiamo che una istruzione macchina richieda 10 microistruzioni e 2
accessi in memoria centrale (es. leggere gli operandi)
• Una microistruzione è eseguita in 100 ns, l’accesso in memoria in 500 ns
• Il costo totale è: 10 x 100 + 2 x 500 = 2000 ns = 2µs
• In caso di esecuzione hw ideale (costo esecuzione 0), tempo =
2x500=1000ns = 1µs
• Nota, in caso di tempo di accesso alle microistruzioni pari al tempo di
accesso in memoria centrale (10+2)x500 = 6000 ns =6µs
Calcolatori Elettronici, Beraldi, aa 03/04
Architettura RISC
Reduced Instruction Set Computer
• Filosofia proposta alle fine degli anni 70
• Nell’80 progettazione del MIPS, e poi del chip SPARC
• L’idea chiave è progettare un set istruzioni in modo da aumentare il
numero di istruzioni che, nell’unità di tempo, possono iniziare
l’esecuzione (idealmente una per colpo di clock)
Calcolatori Elettronici, Beraldi, aa 03/04
Principi di progettazione del set istruzioni
1.
2.
3.
4.
Tutte le istruzioni frequenti eseguite direttamente in hw
Massimizzare la velocità con la quale vengono iniziate nuove
istruzioni
–
–
–
5.
La durata dell’esecuzione di una singola istruzione può anche aumentare
Rendere semplice la decodifica
Istruzioni con pochi formati
Solo due istruzioni, load e store, dovrebbero accedere in memoria
Ciò consente da un lato di effettuare operazioni con operandi nei registri
e dall’altro di sovrapporre l’accesso alla memoria con l’esecuzione di altre
operazioni
Disporre di molti registri
–
Ciò per evitare di dover ricaricare un registro
Calcolatori Elettronici, Beraldi, aa 03/04
Tecniche per aumentare le prestazioni
•
In generale esistono varie tecniche per migliorare le prestazioni di un
sistema di calcolo…
•
Aumentare la frequenza della CPU e/o diminuire CPI
•
•
–
Sfruttare qualche forma di parallelismo a livello della singola istruzione
Ridurre il tempo di accesso alla memoria
Impiego di più processori
Calcolatori Elettronici, Beraldi, aa 03/04
Memoria cache
Pipelining
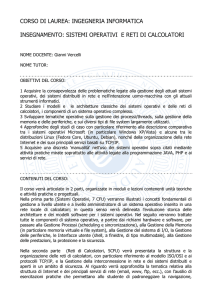
•
Ann, Brian, Cathy, Dave
hanno un carico di panni da
lavare,asciugare,stirare
•
Lavatrice 30 minuti
•
Asciugatrice 40 minuti
•
Stiratura takes 20 minuti
•
(*)Tratto da “Hennessy,Patterson, Architettura dei computer: un approccio
quantitativo, Jackson”
A
B
C
D
Calcolatori Elettronici, Beraldi, aa 03/04
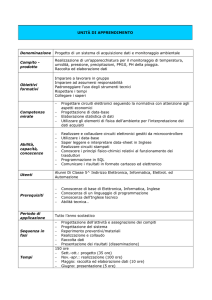
Sequential Laundry
6 PM
7
8
9
10
11
Midnight
Time
30
T
a
s
k
O
r
d
e
r
40 20 30
40 20 30
A
B
C
D
• Sequential laundry = 6 ore per 4 carichi
Calcolatori Elettronici, Beraldi, aa 03/04
40 20 30
40 20
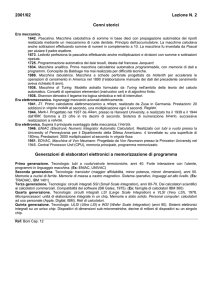
Pipelined Laundry
6 PM
7
8
9
10
11
Midnight
10
11
Midnight
Time
30
T
a
s
k
O
r
d
e
r
40
40
40
40 20
A
B
C
D
• Pipelined laundry = 3.5 ore per 4 carichi
Calcolatori Elettronici, Beraldi, aa 03/04
Pipelined Laundry
6 PM
7
8
9
Time
30
T
a
s
k
O
r
d
e
r
40
A
B
40
40
40 20
•
•
•
•
•
•
C
D
Calcolatori Elettronici, Beraldi, aa 03/04
Il ritardo (latenza) non
diminuisice
Aumenta il throughput del
sistema
Pipeline limitato dallo stadio più
lento
Più task simultaneamente
Speedup potenziale= numero di
stadi
E’ richiesto del tempo per
riempire la pipeline
Parallelismo a livello istruzione
Pipelining
•
•
Suddividere l’esecuzione dell’istruzione in fasi consecutive
Ogni fase viene gestita da uno stadio
–
•
•
I risultati dello stadio i sono passati in ingresso allo stadio i+1
Aumenta il numero delle istruzioni iniziate per secondo (banda)
–
•
Gli stadi possono lavorare in parallelo
In teoria un aumento della banda pari al numero di stadi
In generale la latenza (ossia la durata totale dell’esecuzione di una
istruzione) aumenta
Calcolatori Elettronici, Beraldi, aa 03/04
Parallelismo a livello istruzione
Pipelining
Calcolatori Elettronici, Beraldi, aa 03/04
Parallelismo a livello istruzione
Architetture superscalari (doppia pipeline)
• Pipeline specializzate
• Le istruzioni eseguite in parallelo devono essere compatibili (non usare
gli stessi registri o dipendere dal risultato delle altre istruzioni)
Calcolatori Elettronici, Beraldi, aa 03/04
Parallelismo a livello istruzione
Architetture superscalari (unità funzionali multiple)
• Le unità dello stadio 4 sono più lente delle altre (richiedono + cicli di
clock)
– Devono accedere alla memoria, o eseguire operazioni fp
Calcolatori Elettronici, Beraldi, aa 03/04
Memoria principale (RAM – Random Access Memory)
nozioni di base
1 byte
•
•
•
•
Insieme di n celle di memoria
Ogni cella memorizza un byte
Ogni cella è univocamente individuata da
un indirizzo IND (indirizzo di memoria)
k byte formano una parola (es: k=4)
– Parola allineata se inizia dal byte con
indirizzo IND tale IND mod k =0
n
•
•
Sono possibili due operazioni: lettura e
scrittura
Caratteristiche principali:
– capacità (tipica 64-256 MB),
• 1K=1024,1 M = 1024K,
– tempo di accesso indipendente dalla
posizione (tipico, 10 ns),
– Le informazioni sono volatili (non persistono
se l’alimentazione viene meno)
Calcolatori Elettronici, Beraldi, aa 03/04
Interazione CPU-Memoria
schema di principio
indirizzo
CPU
Read
MEMORIA
dato
Di norma l’accesso alla memoria è
maggiore di circa un fattore 10 rispetto
alla velocità della CPU
indirizzo
CPU
Write
dato
Calcolatori Elettronici, Beraldi, aa 03/04
MEMORIA
Memorie cache
Nozioni di base
•
•
•
•
E’ una memoria di piccole dimensioni (~KB) e veloce (rispetto alla memoria
principale)
Impiegata per diminuire la latenza degli accessi in memoria
Se il dato richiesto è in cache risparmio il tempo di accesso al dato è quello della
cache (c)
Se il dato non è in cache deve essere aggiunto il tempo d’accesso alla memoria
centrale (m).
–
Il dato viene trasferito anche in cache (si copia una cache line)
Calcolatori Elettronici, Beraldi, aa 03/04
Memorie cache
Schema di principio
CPU
Richiesta
Calcolatori Elettronici, Beraldi, aa 03/04
cache
cache miss
richiesta a
memoria
Memoria
Memorie cache
Nozioni di base
•
Calcolo dei tempi
– Parametri: c= tempo di accesso alla cache, m= tempo di accesso alle
memoria principale, h=percentuale di successi (hit ratio)
– tempo medio di accesso= c + (1-h) m
• Due alternative
– Cache unificata per dati ed istruzioni
– Cache separate (split cache) per dati ed istruzioni
• Architettura Harvard
Calcolatori Elettronici, Beraldi, aa 03/04
Memorie cache
Principi di località
•
•
Località Spaziale
– dati e/o istruzioni memorizzati ad indirizzi vicini sono utilizzati dai
programmi in tempi ravvicinati
– Esempi
•
scansioni di strutture dati come matrici e vettori
•
esecuzione di codice sequenziale
Località Temporale
– programma tende ad utilizzare in un breve intervallo di tempo più volte lo
stesso dato e/o istruzione, esempi:
•
esecuzione di cicli
•
esecuzione sottoprogrammi
•
strutture dati tipo stack
•
Variabili tipo indice
Calcolatori Elettronici, Beraldi, aa 03/04
Memoria secondaria
E’ una memoria persistente
• Dischi magnetici
•
– Fissi (Hard Disk, HD)
•
Diverse prestazioni: IDE, EIDE, SCISI,..
– Removibili (Floppy)
• CD-ROM
• DVD
• Memory stick
Calcolatori Elettronici, Beraldi, aa 03/04
Dischi magnetici
• Registrazione seriale su tracce concentriche
– 800-2000 tracce/cm (larghe ~10µ)
• Tracce divise in settori contenenti i dati, un preambolo e un ECC (ErrorCorrecting Code)
– la capacità di memorizzazione dopo la formattazione scende del 15%
rispetto alla capacità nuda
• Velocità di rotazione costante (~7200 RPM)
– Densità di registrazione (bit/cm) variabile con il raggio della traccia
• Velocità di trasferimento di 5-20 MB/sec
– Burst rate (trasferimento singolo settore)
– Sustained rate (valore medio)
Calcolatori Elettronici, Beraldi, aa 03/04
Dischi winchester
•
Tempo di seek
–
spostamento delle testine sulla
traccia desiderata (~ 5-10ms)
•
Latenza di rotazione
–
spostamento sul settore
desiderato supposto che la
testina sia gia’ sulla traccia
–
Influenzato dalla velocità di
rotazione (RPM)
•
Capacità
–
FD: 1.44 MB
–
HD: 20-100 GB
•
•
18 x 80 x 2 x 512 byte
Cache interna
Calcolatori Elettronici, Beraldi, aa 03/04
Esercizio
•
Si supponga che un HD sia caratterizzato dai seguenti parametri
–
–
–
•
Tempo medio di posizionamento, ts = 15 ms
Numero di giri al minuto, rpm= 7200
Numero di settori per traccia, Nb = 32
Si calcoli
1.
2.
3.
Il tempo medio di trasferimento di un blocco
Il tempo medio di trasferimento di 10 settori consecutivi
Il tempo medio di trasferimento di 10 settori casuali
Calcolatori Elettronici, Beraldi, aa 03/04
Soluzione
•
La latenza dovuta alla rotazione, espressa in
ms, vale tr [ms] = (0,5)x60x1000/rpm
–
•
t
b
t
s
Poiché la testina effettua un giro completo
(ossia 360°) in circa 2x4,15=8,30 ms, un
angolo pari 360/Nb ° verrà percorso in
8,4/Nb ms
–
•
t
r
0,5 x 60 x 1000 / 7200 = 300/72 ~ 4,15ms
tr=8,30/32 ~ 0,26 ms
Soluzione
–
Trasferimento di un blocco
–
Trasferimento di 10 blocchi consecutivi
–
Trasferimento 10 blocchi casuali
•
•
•
15ms+4,15+0,26=19,41 ms
15 + 4,15 + 10 x 0,26 = 21,75 ms
10 x(19,41) = 194,1 ms (~10 volte in più)
Calcolatori Elettronici, Beraldi, aa 03/04
Dischi IDE, EIDE, SCISI
• IDE (Integrated Drive Electronics)
– Standard nato con il PC XT IBM
– Limiti
• 16 testine, 63 settori, 1024 cilindri
•
528 MB
Il controllore gestisce al più 2 unità disco
• EIDE (Extended IDE)
– Estensione fino a 224 settori, controllore gestisce fino a 4 unità disco
• SCISI (“scasi”, Small Computer Standard Interface)
– Connessioni a daisy chain
Calcolatori Elettronici, Beraldi, aa 03/04
Altri supporti
•
CD-ROM
–
Rotazione variabile 200-520 RPM per
–
Velocità di rotazione espresse come multiplo della velocità CD-ROM audio (75
avere
flusso dati uniforme
(musica)
settori/sec)
•
–
•
CD-R
–
Laser a due potenze
•
•
•
•
alta (scrive): ‘brucia’ delle areole nello strato colorato
bassa legge: come nei CD-ROM
Solco pre-inciso per guidare il laser
CD-WR
–
Laser a tre potenze:
•
•
2x,..,32x,..
Capacità: 650 MB utili
supporto a due stati: amorfo e cristallino
DVD (Digital Versatile Disk)
–
Capacità 4.7 GB, 8.5 GB, 9.4 GB, 17 GB
Calcolatori Elettronici, Beraldi, aa 03/04
Flash memory USB removable
• Capacità dell’ordine di centinaia di byte (tipico, 256 MB, ma anche GB)
• Dimensioni ridotte e rimovibili (Inseriscono sul bus USB)
512MB
2.2 GB
Calcolatori Elettronici, Beraldi, aa 03/04
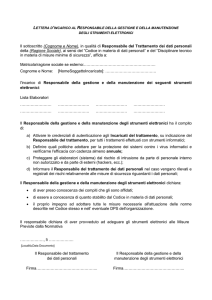
Gerarchia delle memorie
Costo
Calcolatori Elettronici, Beraldi, aa 03/04
Dispositivi per l’ingresso e l’uscita di dati
• Un calcolatore acquisisce dall’esterno o trasferisce all’esterno dati
mediante vari dispositivi
• Un dispositivo ha due “parti”
– Una parte collegata al computer mediante un controllore (controller)
– Una parte visibile all’esterno dall’utente
• Lo scambio dei dati avviene mediante un bus o mediante accesso
diretto alla memoria (DMA)
Calcolatori Elettronici, Beraldi, aa 03/04
Interrupt
nozioni di base
•
•
Un dispositivo può interrompere l’esecuzione del programma attualmente
eseguito dalla CPU (interrupt)
La CPU deve gestire l’interrupt e poi riprendere l’esecuzione del programma:
–
è funzionalmente analogo ad un meccanismo di chiamata a funzione nei linguaggi di
programmazione
•
•
Consente d’interagire con l’esterno
E’ un meccanismo sfruttato dai SO multitasking (il clock interrompe
periodicamente la CPU per far progredire un altro task)
Interrupt
.
.
.
.
.
.
.
.
.
.
Interrupt
handler
.
.
Calcolatori Elettronici, Beraldi, aa 03/04
Collegamento dei dispositivi I/O
soluzione con bus unico
Il bus è di norma dedicato ai trasferimenti CPU-Memoria
I dispositivi possono “rubare” cicli di bus (cycle stealing)
Calcolatori Elettronici, Beraldi, aa 03/04
Collegamento dei dispositivi I/O
soluzione con bus unico
• Il bus è una risorsa condivisa, come regolarne l’uso?
• Protocollo (insieme di regole) di utilizzo
Arbitro del bus
Calcolatori Elettronici, Beraldi, aa 03/04
Collegamento dei dispositivi I/O
soluzione con bus multiplo
Calcolatori Elettronici, Beraldi, aa 03/04
Terminali
•
Si compongono di due parti
– Tastiera
– Schermo
• Tipologie
– A caratteri
– Grafici
– RS-232
Calcolatori Elettronici, Beraldi, aa 03/04
Terminali a carattere
• Impiegano una memoria (memoria video) per la memorizzazione del
codice ASCII del carattere e degli attributi
• La memoria video è mappata nello spazio indirizzamento della memoria
principale
• Dimensione tipica della visualizzazione 25 x 80 (righe x colonne) 4000
byte
• Quasi archeologia!
Calcolatori Elettronici, Beraldi, aa 03/04
Terminali grafici
• Unità minima che può essere visualizzata: pixel
– Colore ottenuto mediante sovrapposizione dei 3 colori fondamentali additivi
(Rosso, Verde, Blue)
• Codifica del pixel mediante k bit (k=8,16,24)
• Dimensioni dello schermo (4:3)
–
–
–
–
640 x 480 pixel
800 x 600
1024 x 768
1280 x 960
• Dot Pitch: La distanza fra due pixel dello stesso colore
– Valori tipici: 0.31mm, .28mm, .27mm, .26mm, e .25mm.
– Valori minori indicano qualità migliori
• Schede grafiche con capacità di elaborazione per limitare trasferimento
dati da RAM a RAM video, e evitare lavoro alla CPU
Calcolatori Elettronici, Beraldi, aa 03/04
Stampanti
• Getto d’inchiostro
• Laser B/N
• Laser a Colori
• (Vedi sezione 2.4.4)
Calcolatori Elettronici, Beraldi, aa 03/04
Modem
• (Vedi sezione 2.4.5)
Calcolatori Elettronici, Beraldi, aa 03/04
Modem
•
Calcolatori Elettronici, Beraldi, aa 03/04