7. Simmetrie
Le simmetrie di un sistema meccanico sono la chiave per determinarne il moto. Ad ogni
gruppo continuo di trasformazioni ad un parametro, che lascia invariata la lagrangiana,
corrisponde infatti un integrale primo del moto, che consente di ridurre la dimensionalità del sistema. Se solo le equazioni del moto sono invarianti rispetto ad un gruppo di
trasformazioni continuo o discreto, il flusso è invariante rispetto al gruppo, ma non risultano associati integrali primi del moto. Le traslazioni e rotazioni sono simmetrie della
lagrangiana di un sistema isolato, la quantità di moto ed il suo momento i corrispondenti
integrali primi. Le trasformazioni di moto uniforme, di gauge e di scala sono possibili
simmetrie delle equazioni del moto, non della lagrangiana. Le trasformazioni discrete
quali l’inversione spaziale e temporale, se simmetrie della lagrangiana, lasciano invariate
le equazioni del moto ma non inducono integrali primi.
7.1. GRUPPI CONTINUI DI SIMMETRIA
Un sistema si dice invariante o simmetrico rispetto a una trasformazione delle coordinate
e del tempo
q → q′
t → t′
(7.1.1)
che induce una trasformazione delle velocità
q̇ → q̇′ =
dq′
dt′
(7.1.2)
se la sua lagrangiana non cambia
L(q′ , q̇′ , t′ ) = L(q, q̇, t)
(7.1.3)
c 88-08- 9820
7.1. Gruppi continui di simmetria
171
Le trasformazioni più semplici sono le traslazioni nelle coordinate generalizzate, cioè
(
qi′ = qi + α δik
(7.1.4)
t′ = t
dove α è un parametro reale. La lagrangiana è invariante per traslazione lungo qk se non
dipende da qk , cioè se ∂L/∂qk = 0; dalle equazioni di Lagrange segue che pk è conservato.
Se qk è una coordinata cartesiana la trasformazione è una traslazione spaziale e pk è una
quantità di moto. Se qk è un angolo, la trasformazione è una rotazione e pk è un momento
della quantità di moto come mostra l’analisi dimensionale.
La lagrangiana è invariante rispetto ad una una traslazione temporale
q′ = q,
t′ = t + β
(7.1.5)
se non dipende esplicitamente dal tempo, cioè se ∂L/∂t = 0, ed in tal caso l’hamiltoniana
è un integrale primo. Infatti da (6.7.7) e (6.7.8) segue che
d
X
dH
=
dt
i=1
∂H
∂H
q̇i +
ṗi
∂qi
∂pi
+
∂H
∂H
∂L
=
=−
∂t
∂t
∂t
(7.1.6)
Se le forze e i vincoli sono indipendenti dal tempo, l’hamiltoniana rimane costante al variare
del tempo. La condizione ∂L/∂t = 0 può aversi anche con vincoli che dipendono da t; in
tal caso T 6= T2 e quindi H pur conservandosi non rappresenta l’energia del sistema. Come
esempio si consideri un punto vincolato su una retta che ruota in un piano con velocità
angolare costante e soggetto ad una forza che dipende solo dalla distanza dall’origine.
Detta q l’ascissa sulla retta la lagrangiana e l’hamiltoniana sono date da
L=m
q2
q̇ 2
+ mω 2 − V (q),
2
2
H=
p2
q2
− mω 2 + V (q),
2m
2
(7.1.7)
Quindi l’hamiltoniana si conserva ma non è l’energia totale. Se ci mettessimo nel sistema
rotante allora il vincolo sarebbe indipendente dal tempo e mω 2 q 2 /2 andrebbe inclusa nel
potenziale come contributo della forza centrifuga e quindi in tal caso la costante del moto
H tornerebbe ad essere interpretata come energia totale poiché l’energia cinetica ha solo la
componente quadratica. Se i vincoli non dipendono dal tempo H è l’energia e si conserva
solo se il potenziale V è indipendente dal tempo.
Gruppi continui ad un parametro
Consideriamo dapprima un gruppo G di trasformazioni ad un parametro definite da
qα = G(q, α)
tale che
dqα
= ψ(qα ),
dα
(7.1.8)
α∈R
(7.1.9)
172
c 88-08- 9820
7. Simmetrie
Le trasformazioni (7.1.8) formano un gruppo continuo ad un parametro se è soddisfatta la
(7.1.9), dove il campo vettoriale ψ vien detto generatore infinitesimo del gruppo. L’origine
α = 0 corrisponde alla trasformazione identica
q = G(q, 0)
(7.1.10)
e la proprietà di gruppo è quella del flusso generato dal campo vettoriale; la legge di
composizione, che segue da qα+β = G(qα , β), si scrive
G(G(q, α), β) = G(q, α + β)
(7.1.11)
ed è additiva nello spazio dei parametri. La trasformazione inversa si ha cambiando il
segno del parametro
q = G(qα , −α)
(7.1.12)
Il gruppo sopra introdotto è un gruppo commutativo ad un parametro la cui versione
infinitesima si scrive
qα+ǫ = qα + ψ(qα ) ǫ + O(ǫ2 )
(7.1.13)
Le trasformazioni finite si ottengono integrando la equazione differenziale (7.1.9).
Teorema di Nöther. Se la lagrangiana è invariante per il gruppo continuo di trasformazioni ad un parametro generato da ψ
L(qα , q̇α , t) = L(q, q̇, t)
(7.1.14)
esiste un integrale primo del moto definito da
A(q, p) = p · ψ(q)
(7.1.15)
Infatti sia q(t) la soluzione delle equazioni del moto, con condizione iniziale q(0) = q, e
qǫ (t) = G(q(t), ǫ) il suo trasformato per un valore infinitesimo ǫ del parametro. Facciamo
uno sviluppo di Taylor al primo ordine in ǫ, tenendo conto di (7.1.9), e successivamente
deriviamo rispetto a t
qǫ (t) = q(t) + ψ(q(t))ǫ + O(ǫ2 ),
q̇ǫ (t) = q̇(t) +
d
ψ(q(t))ǫ + O(ǫ2 )
dt
(7.1.16)
Sostituendo in (7.1.14) valutata per α = ǫ e sviluppando ancora in serie di Taylor, al primo
ordine in ǫ, si ottiene
d
ψ, t + O(ǫ2 ) − L(q, q̇, t) =
dt
∂L dψ(q)
∂L
· ψ(q) ǫ +
·
ǫ + O(ǫ2 ) =
=
∂q
∂ q̇
dt
dp
dψ(q)
d
=
· ψ(q) ǫ + p ·
ǫ + O(ǫ2 ) =
[p · ψ(q)] ǫ + O(ǫ2 )
dt
dt
dt
0 = L q + ǫψ, q̇ + ǫ
(7.1.17)
c 88-08- 9820
7.1. Gruppi continui di simmetria
173
dove abbiamo usato le equazioni del moto di Lagrange per q(t). Dividendo per ǫ, nel limite
ǫ → 0 si prova che A = p · ψ(q) è un integrale primo del moto.
La dimostrazione si può fare partendo da un valore α qualsiasi e sostituendo qǫ in (7.1.12)
con qα+ǫ ; in questo caso uguagliando L(qα+ǫ , q̇α+ǫ , t) con L(qα , q̇α , t) si ottiene A =
pα · ψ(qα ) come espressione dell’integrale primo.
Gruppi continui ad m parametri
Dato un gruppo di trasformazioni ad m parametri (φ1 , . . . , φm ) (in genere non commutativo), consideriamo un sottogruppo commutativo, specificato da una traiettoria nello
spazio dei parametri φ1 = φ1 (α), . . . , φm = φm (α) e scriviamo
qα = G(q, α) ≡ G(q, φ1 (α), . . . , φm (α))
(7.1.18)
dove qα soddisfa l’equazione (7.1.9) e ψ(q) è il generatore della trasformazione infinitesima, associato al sottogruppo considerato. Se la lagrangiana è invariante rispetto alle
trasformazioni del gruppo, lo è rispetto ad un qualsiasi sottogruppo commutativo; se ψ(q)
è il generatore infinitesimo, per il teorema di Nöther A = ψ(q) · p è un integrale primo del
moto.
Come esempio di applicazione consideriamo le traslazioni e le rotazioni nello spazio ordinario R3 ; le coordinate lagrangiane coincidono con le coordinate cartesiane qi = xi e quindi
q = r. Le traslazioni sono un gruppo commutativo a tre parametri; il sottogruppo delle
traslazioni lungo un asse individuato dal versore n hanno ψ = n come generatore e quindi
A = n · p è l’integrale primo se L è invariante.
Le rotazioni formano un gruppo non commutativo parametrizzato usualmente dagli angoli
di Eulero, vedi capitolo 8. Sottogruppi commutativi sono le rotazioni attorno ad un asse
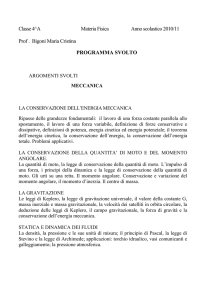
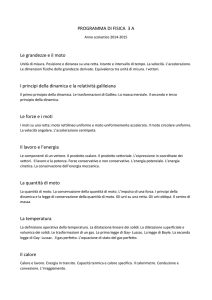
n, il cui generatore infinitesimo è ψ = n × r. Infatti il trasformato r′ = r + dr di un vettore
r si ottiene ruotando attorno a n di un angolo dα infinitesimo nel verso antiorario il piano
che passa per n e r, vedi figura 7.1.1; il risultato è dr = dαn × r. La prova è immediata se
n è uno degli assi coordinati, ad esempio l’asse z; la trasformazione rα = Rz (−α)r è una
rotazione del vettore r di un angolo α nel verso antiorario dove Rz (α) è data da (1.3.18).
Per le prime due componenti (la terza resta invariata) si ha
d
− sin α − cos α
0 −1
cos α sin α
xα
xα
xα
=
=
yα
cos α − sin α
1 0
yα
− sin α cos α
dα yα
(7.1.19)
Ne segue dunque che il generatore infinitesimo ha come componenti (−yα , xα , 0) che sono
quelle di n × rα dove n = (0, 0, 1) è il versore dell’asse z.
L’integrale primo del moto
A=n×r·p=n·r×p=n·L
(7.1.20)
è la componente lungo l’asse di rotazione del momento della quantità di moto. Analoghe
considerazioni si applicano ad un sistema isolato di N particelle; la lagrangiana è invariante
174
c 88-08- 9820
7. Simmetrie
n
77777777777777777777777777
7777
77777
r +d r
77777777777777777777777777
7777
77777
77777777777777777777777777
7777
77777
77777777777777777777777777
77777d77777
7777
α
77777777777777777777777777
77777
77777777777777777777777777
77777 r
77777777777777777777777777
77777777777777777777777777
77777777777777777777777777
θ
O
!!!
!!!
!!!
Figura 7.1.1. Rotazione infinitesima di un vettore.
per traslazioni e la quantità di moto totale ed il momento della quantità di moto totale
risultano conservati.
7.2. INVARIANZA DELLE EQUAZIONI DEL MOTO
Consideriamo una trasformazione lineare G nello spazio delle fasi
x′ = Gx
(7.2.1)
Se è originata da una trasformazione lineare q′ = Lq nello spazio delle configurazioni si ha
G = L ⊕ L. Una variabile dinamica scalare A(x) ed un campo vettoriale Φ si trasformano
in A′ e Φ′ dove
A′ (x′ ) = A(x),
Φ′ (x′ ) = GΦ(x)
(7.2.2)
Il flusso St generato dal campo vettoriale Φ si trasforma come il campo stesso e si può
quindi scrivere
St′ (x) = GSt (G−1 x),
Φ′ (x) = GΦ(G−1 x)
(7.2.3)
I flussi St e St′ sono soluzione delle equazioni differenziali
dx′ (t)
= Φ′ (x′ (t))
dt
dx(t)
= Φ(x(t)),
dt
(7.2.4)
Si noti che la seconda equazione è ottenuta dalla prima applicando G ad entrambi i lati,
tenendo conto di (7.2.2) e di x′ = Gx. Se il campo vettoriale è invariante per la trasformazione tale risulta anche l’equazione differenziale e di conseguenza è invariante il flusso
St′ (x) = St (x) o più esplicitamente
St (x) = GSt (G−1 x),
−→
St (Gx) = GSt (x)
(7.2.5)
c 88-08- 9820
7.3. Trasformazioni di scala e di Galileo
175
x
S (x )
t
G
G (x )
α
S
t
o
α
o
S (x )
t
Gα ( x)
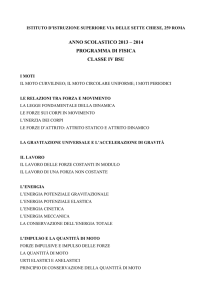
Figura 7.2.1. Commutazione tra flussi.
Nel caso di un gruppo non lineare di trasformazioni x′ = Gα (x) l’invarianza delle equazioni
del moto implica una condizione analoga alla (7.2.5)
Gα ◦ St = St ◦ Gα
(7.2.6)
che esprime la commutazione dei flussi, rappresentata graficamente dalla figura 7.2.1.
Il campo vettoriale delle equazioni del moto generate da una lagrangiana L = 21 u·Tu−V (q)
con T costante è dato da Φ = (u, T−1 f (q)) dove f = −∂V /∂q, il campo generato dalla
lagrangiana trasformata L′ (q, u) = L(L−1 q, L−1 u) è dato da (7.2.3).
7.3. TRASFORMAZIONI DI SCALA E DI GALILEO
Vi sono trasformazioni continue che non lasciano inalterata la lagrangiana, ma lasciano
invarianti le equazioni del moto. In tal caso non vi sono integrali primi del moto associati,
tuttavia il flusso risulta invariante. Se ne possono ugualmente dedurre alcune proprietà
del moto senza risolvere esplicitamente le equazioni.
Le equazioni del moto restano invarianti per una trasformazione q → q′ , t → t′ se la
lagrangiana trasformata L′ è proporzionale ad L oppure se differisce da questa per una
derivata totale rispetto a t di una funzione delle sole q.
L′ = cL,
L′ = L +
d
f (q)
dt
(7.3.1)
La seconda proprietà si dimostra osservando che le equazioni di Lagrange per la lagrangiana
df (q)/dt sono verificate identicamente per qualunque sia la funzione q(t). Trasformazioni
significative, che cambiano L secondo (7.3.1), sono quelle di scala, di Galileo e di gauge.
Trasformazioni di scala
Le trasformazioni di scala, o di similitudine, sono quelle che cambiano la scala delle coordinate e del tempo. Se qi sono coordinate cartesiane consideriamo la trasformazione
q′ = αq
t′ = βt
=⇒
q̇′i ≡
dq′
α
= q̇
′
dt
β
(7.3.2)
c 88-08- 9820
7. Simmetrie
176
Sia L la lagrangiana di un sistema a vincoli indipendenti dal tempo e supponiamo che i
coefficienti Tik dell’energia cinetica siano costanti e che il potenziale V = V0 (q) sia una
funzione omogenea delle qi , di grado k
V (αq) = αk V (q)
(7.3.3)
α2
α
L = L(αq, q̇, βt) = 2 T − αk V
β
β
(7.3.4)
La lagrangiana trasformata è perciò
′
per cui L′ = αk (T − V ) = αk L se α2−k = β 2 . Quindi se si ha
q′ = αq
k
k
t′ = α1− 2 t
q̇′ = α 2 q̇
(7.3.5)
la lagrangiana di partenza è proporzionale a quella trasformata e le equazioni del moto
rimangono invarianti. Ciò significa che se S(q0 , q̇0 , t) è una soluzione delle equazioni di
Lagrange corrispondente a condizioni iniziali q0 , q̇0 , scalando le condizioni iniziali ed il
tempo si ottiene la soluzione precedente scalata
q′ (t′ )
q̇′ (t′ )
k
2
≡ S(αq0 , α q̇0 , α
1− k
2
t; ) =
α
0
0
k
α2
S(q0 , q̇0 , t) =
αq(t)
k
α 2 q̇(t)
(7.3.6)
Chiamiamo simili tali traiettorie; detta s la lunghezza di un arco di traiettoria e v il modulo
k
k
della velocità, s1− 2 /t e s 2 /v sono costanti su traiettorie simili. Cosı̀ per k = 2, si ritrova
l’indipendenza del periodo dall’ampiezza nelle oscillazioni armoniche, condizione che si
perde in presenza di un termine anarmonico (per esempio γq 4 ), mentre, per k = −1, si
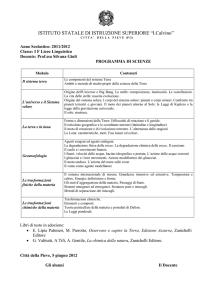
ritrova la terza legge di Keplero. Nella figura 7.3.1. mostriamo la traiettoria dell’oscillatore
armonico nello spazio delle configurazioni esteso e la sua trasformata di scala.
q
t
Figura 7.3.1. Trasformazione di scala per l’oscillatore armonico.
c 88-08- 9820
7.4. Trasformazioni discrete
177
Trasformazioni di Galileo
Consideriamo le trasformazioni di moto uniforme definite da r′ = r + ut. È ben noto che
le equazioni di Newton per un sistema meccanico isolato sono invarianti rispetto a tali
trasformazioni. Se per semplicità consideriamo un sistema di N punti vincolati a muoversi
su una retta e se qi sono le loro coordinate, una trasformazione di Galileo è definita da
qi′ = qi + ui t,
t′ = t
(7.3.7)
Se il sistema è isolato si ha invarianza per traslazione e quindi il potenziale (che dipenderà
solo dalle differenze |qi − qj |) è invariante per (7.3.7). L’energia cinetica si trasforma in
T′ =
N
N
X
2
M 2
1X
mi q˙i′ = T +
mi q̇i
u +u
2 i=1
2
i=1
(7.3.8)
e la lagrangiana diventa
#
" N
X
M 2
d
mi qi +
u
L =L+
u
dt
2
i=1
′
(7.3.9)
vale a dire L′ differisce da L per la derivata totale rispetto a t di una funzione delle
coordinate, che non dà contributo alle equazioni del moto. Analogamente abbiamo provato
che per trasformazioni di gauge la lagrangiana per una particella carica in un campo
elettromagnetico cambia solo per una derivata totale rispetto a t di una funzione delle
coordinate. Anche in tal caso le equazioni del moto rimangono inalterate.
7.4. TRASFORMAZIONI DISCRETE
Oltre alle trasformazioni continue si possono considerare anche trasformazioni discrete,
quali l’inversione spaziale e temporale; l’invarianza della lagrangiana rispetto a queste
trasformazioni non comporta l’esistenza di integrali primi ma solo l’invarianza del flusso.
Inversione spaziale. Consiste nella riflessione degli assi rispetto rispetto all’origine cioè
q′ = −q,
t′ = t
⇒
q̇ = −q̇
(7.4.1)
Poiché l’energia cinetica è invariante per (7.4.1), se V è pari, cioè V (−q) = V (q) anche L
è invariante e quindi si ha
q′ (t)
q̇′ (t)
≡ S(−q0 , −q̇0 ; t) = −S(q0 , q̇0 ; t) ≡
−q(t)
−q̇(t)
(7.4.2)
178
c 88-08- 9820
7. Simmetrie
Questo significa che si riflettono le condizioni iniziali si ottiene una traiettoria riflessa. Si
noti che vi sono vettori (detti assiali), come il momento angolare, che non cambiano per
riflessione. Si possono inoltre definire le riflessioni speculari rispetto a un piano.
Riflessione temporale. È definita da una inversione dell’asse temporale cioè
q′ = q
t′ = −t
⇒
q̇′ = −q̇
(7.4.3)
Nel caso in cui si abbia un potenziale ordinario l’invarianza di L per (7.4.3.) è sempre
soddisfatta e implica
′
1 0
q (−t)
q(t)
≡ S(q0 , −q̇0 , −t) =
S(q0 , q̇0 , t) ≡
(7.4.4)
q̇′ (−t)
0 −1
−q̇(t)
Si ha invarianza per riflessione temporale per i sistemi soggetti a vincoli fissi e forze posizionali; la traiettoria non cambia se si inverte la velocità iniziale e si va a ritroso nel
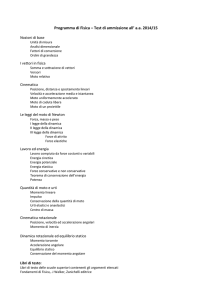
tempo. Nella figura 7.4.1 mostriamo le traiettorie di un oscillatore armonico, nello spazio
delle configurazioni esteso, ottenute per riflessione spaziale e per riflessione temporale.
q
q
!!!!
!!!!
!!!!
t
t
Figura 7.4.1. Riflessione spaziale (lato sinistro), riflessione temporale (lato destro).
Esempi. La lagrangiana di un oscillatore L = mq̇ 2 /2 − ω 2 q 2 /2 è invariante per riflessione
spaziale, temporale e per trasformazioni di scala. La soluzione
cos(ωt) ω −1 sin(ωt)
q0
(7.4.5)
S(q0 , q̇0 , t) =
q̇0
−ω sin(ωt)
cos(ωt)
si inverte se invertiamo le condizioni iniziali; se invertiamo t e la velocità iniziale si ha
l’inversione della velocità. Scalando le condizioni iniziali q0′ = αq0 , q̇0′ = αq̇0 , si ha una
soluzione scalata con t′ = t.
La lagrangiana di un punto in un campo esterno L = q̇ 2 /2 + gq è invariante per riflessione
temporale e trasformazioni di scala con k = 1. La soluzione è
g q0 + q̇0 t + 2 t2
(7.4.6)
S(q0 , q̇0 , t) =
q̇0 + gt
e si vede che non si riflette per condizioni iniziali riflesse, mentre invertendo q̇0 e t si ha una
soluzione in cui la velocità è invertita. Se si scalano le condizioni iniziali q0′ = αq0 , q̇0′ =
1
1
α 2 q̇0 ed il tempo t′ = α 2 t si ottiene una soluzione scalata.