Elementi di Dinamica
ELEMENTI DI DINAMICA
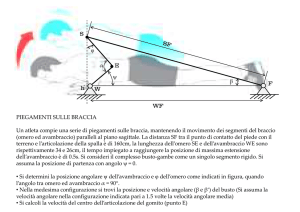
Mentre la cinematica si limita allo studio delle possibilità di movimento di un certo
sistema ed alla relativa descrizione matematica, la dinamica si occupa delle cause che
determinano il moto stesso.
Il legame tra le grandezze dinamiche (forze, momenti, proprietà inerziali dei corpi etc.)
ed il moto che ne consegue è regolato dalle leggi di Newton.
Lo studio di un sistema dinamico è articolato in diverse fasi:
• Definizione di un modello fisico del sistema in esame
• Definizione del diagramma di corpo libero
• Definizione del modello matematico e soluzione
• Confronto con le evidenze sperimentali.
FORZE
Forza: azione di un corpo su un’altro corpo (unità di misura: Newton [N]) e tende a
spostare il corpo lungo la direzione in cui agisce.
La forza è una grandezza vettoriale, pertanto essa possiede
• modulo
• direzione
• verso
• punto di applicazione
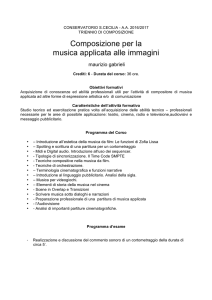
Nel caso di forze applicate ai corpi rigidi ci si può
svincolare dal punto di applicazione e si può considerare
la forza come applicata in un punto qualsiasi della sua
retta d’azione (pricipio di trasmissibilità): considerare la
forza F come applicata in A o in B non cambia nulla dal
punto di vista delle reazioni sui vincoli in C e D
OPERAZIONI SULLE FORZE
Composizione di due forze:
Date due forze F1 ed F2 agenti sullo stesso
punto di un corpo rigido, esse possono
essere composte secondo la regola del
parallelogramma. La risultante R della
composizione ha sul corpo il medesimo
effetto del sistema di forze.
Scomposizione di due forze:
Analogamente una forza R può
essere sostituita dalla
scomposizione nelle sue
componenti F1 ed F2 lungo due
direzioni, facendo attenzione che
le rette d’azione passino per il
punto di applicazione di R
OPERAZIONI SULLE FORZE
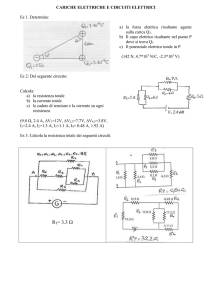
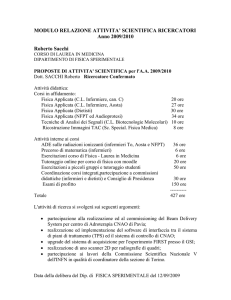
Composizione di due forze parallele:
La forza F1 è applicata nel punto A1 e la forza F2 è
applicata al punto A2. F1 ed F2 sono parallele.
La risultante R delle due forze ha direzione
parallela alla direzione di F1 ed F2 .
La retta di applicazione di R passa per il punto A.
Il punto A si trova sommando e sottraendo una
forza ausiliaria F diretta lungo la congiungente i
punti A1 e A2.
Una forza F è applicata in A1 e la forza opposta –F
in A2.
Si determinano le risultanti R1 ed R2 nei punti A1
e A2 e si determina la risultante R= R1 + R2 con il
metodo già visto.
r
F1
A1
r r
F R1
r
F
r
R2
A
r
R2
r
A2 F2
r
R
r
R1
OPERAZIONI SULLE FORZE
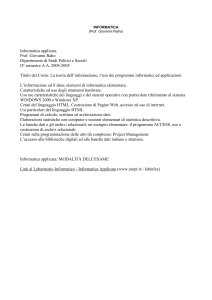
Composizione di due forze parallele:
Per determinare analiticamente la posizione
geometrica della retta di azione r della risultante
R, si consideri che la retta r interseca il segmento
A1A2 nel punto AR. I triangoli A1ARA e il
triangolo F-F1-R1 costruito in A sono simili, così
come sono simili i triangoli A2ARA ed il triangolo
F-F2-R2. Pertanto si può scrivere:
A1A R A R A
=
F
F1
A2AR ARA
=
F
F2
A1A R
A2AR
=
A R A F2
F
⋅
= 2
F1 A R A F1
A1
r
F
r
r
F1
F2 r r
r
R
F R2 r
R1
r
r
R1
AR
A
r
r R2
F
r
F2
A2
F
F1
r
MOMENTO DI UNA FORZA
Misura la tendenza di una forza applicata ad un corpo a far ruotare il corpo stesso attorno a un
punto (nel piano) o ad un’asse (nello spazio). Se F è la forza applicata al punto A del corpo, il
momento di F rispetto al generico punto O è dato dal prodotto vettoriale:
r
j
r
r
r
r r
M O = r ∧ F = r ⋅ F ⋅ sin(α ) ⋅ k = b ⋅ F ⋅ k
r
i
Il momento della forza può essere espresso in funzione delle componenti della forza stessa.
Teorema di Varignon: il momento di una forza intorno ad un punto qualsiasi è pari alla somma
dei momenti delle componenti della forza intorno allo stesso punto.
r
r r
r
r
r r r
r r r r
M OR = r ∧ R = r ∧ (P + Q) = r ∧ P + r ∧ Q = M OP + M OQ
r
r r
momento di P rispetto ad O
M OP = r ∧ P
r
r r
momento di Q rispetto ad O
M OQ = r ∧ Q
COPPIA DI FORZE
Coppia di forze: insieme di due forze uguali in modulo e direzione, verso opposto e non allineate.
La risultante della coppia di forze è nulla.
Il momento della coppia di forze non dipende dal punto intorno al quale lo si calcola (vettore
libero):
r
r r
r
r r
r
r
r
M O = rB ∧ (−F) + rA ∧ F = −rB ∧ F + rA ∧ F =
r
r r r
r r
M O = (rA - rB ) ∧ F = r ∧ F
Il momento della coppia di forze (o semplicemente coppia), dipende solamente dal
modulo delle forze e dalla distanza d tra le rette di applicazione detto braccio della
coppia
r
r
r
M = [(a + d) ⋅ F − a ⋅ F] ⋅ k = d ⋅ F ⋅ k
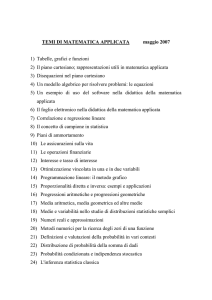
TRASPOSIZIONE DI UNA FORZA
In generale, una forza
1) tende sempre a spostare il corpo a cui è applicata nella sua direzione e verso
2) tende a far ruotare il corpo a cui è applicata intorno ad un punto non appartenente
alla sua retta d’azione
Sistema iniziale: forza
applicata in A con momento
rispetto a B non nullo
Si aggiunge e sottrae
una forza in B, pari alla
forza iniziale in A
Il sistema finale: l’effetto è quello
di una “trasposizione” della
forza nel punto di interesse.
La forza F applicata in A può essere trasportata in B a patto di aggiungere al sistema
una coppia (momento di trasposizione) pari al momento che F applicata in A ha
rispetto a B.
RISULTANTE DI UN SISTEMA DI FORZE
Se su un corpo agiscono diverse forze, il sistema può essere semplificato mediante il
calcolo della risultante. Occorre determinare sia la somma R delle forze che il suo
punto di applicazione
Il calcolo della risultante di un
sistema di forze agenti su un
corpo si può eseguire mediante
la successiva applicazione della
regola del parallelogramma.
Può risultare un metodo
laborioso.
RISULTANTE DI UN SISTEMA DI FORZE
Se su un corpo agiscono diverse forze, il sistema può essere semplificato mediante il
calcolo della risultante. Occorre determinare sia la somma R delle forze che il suo
punto di applicazione
1 - Si sceglie un punto arbitrario O
2 - Si portano tutte le forze in O e si calcola la
somma R
3 - Si calcolano tutti i momenti delle forze rispetto
ad O
4 - Si sostituisce al sistema originario la somma R
delle forze in O più una coppia MO pari alla
somma dei momenti delle singole forze rispetto
ad O.
5 – Si sposta R in un punto generico B
aggiungendo il momento di trasporto.
6 – Si determina la distanza d del punto B da O
imponendo l’uguaglianza del momento di
trasporto M con MO
Tipi di forze
Le forze possono essere classificate secondo diversi criteri. Alcuni esempi:
• Forze concentrate: la zona su cui sono applicate si può ritenere puntiforme
rispetto alle dimensioni del corpo.
• Forze distribuite: la zona su cui sono applicate non può essere trascurata rispetto
alle dimensioni geometriche del corpo
• Forze esterne: sono applicate al corpo (o al sistema di corpi) dall’esterno
• Forze interne: sono forze scambiate tra gli elementi del sistema considerato
• Forze di contatto: dovute all’interazione diretta (contatto fisico) tra due corpi
• Forze di massa: sono correlate alle proprietà di massa del corpo (es: forza peso,
forze elettromagnetiche, forze di inerzia)
Nello studio di un sistema meccanico è importante identificare le forze in gioco
sulla base della natura dei fenomeni fisici coinvolti, della modalità con cui le forze
che ne derivano sono applicate.
È altresì importante impostare il problema coerentemente con i modelli meccanici
scelti per la rappresentazione del fenomeno in esame.