UNIVERSITÀ DEGLI STUDI DI ROMA
TOR VERGATA
FACOLTÀ DI INGEGNERIA
CORSO DI LAUREA IN INGEGNERIA
DELL’AUTOMAZIONE
Tesi di Laurea Specialistica
Algoritmi di stima in real-time della topologia magnetica
per il controllo di plasma nelle macchine da fusione
RELATORE
CANDIDATO
Prof. Luca Zaccarian
Luca Spagnoli
CORRELATORE
Dott. Luca Zabeo
A.A. 2006/2007
Ai miei amici,
vecchi e nuovi, vicini e lontani.
Inoltre, ai piccoli Gabriele e Lorenzo.
Indice
Ringraziamenti
1
Introduzione
3
1 LA FUSIONE TERMONUCLEARE
6
1.1
Introduzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6
1.2
Principi di fusione nucleare . . . . . . . . . . . . . . . . . . . . . . . .
9
1.2.1
1.3
1.4
Fusione sul Sole e sulla Terra . . . . . . . . . . . . . . . . . .
11
Il confinamento magnetico . . . . . . . . . . . . . . . . . . . . . . . .
14
1.3.1
TOKAMAK . . . . . . . . . . . . . . . . . . . . . . . . . . . .
16
1.3.2
Configurazioni di plasma . . . . . . . . . . . . . . . . . . . . .
20
Esperimento JET . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
23
2 IL SISTEMA DI CONTROLLO NEL JET
25
2.1
Principali sistemi di controllo . . . . . . . . . . . . . . . . . . . . . .
25
2.2
Principi di misura magnetica nelle macchine da fusione . . . . . . . .
36
2.2.1
40
Diagnostiche magnetiche nel JET . . . . . . . . . . . . . . . .
3 LA RICOSTRUZIONE MAGNETICA
41
3.1
Equazione di equilibrio Grad-Shafranov . . . . . . . . . . . . . . . . .
42
3.2
Metodi di ricostruzione . . . . . . . . . . . . . . . . . . . . . . . . . .
47
INDICE
I
INDICE
4 METODI E MODELLI
49
4.1
Modello Polinomiale . . . . . . . . . . . . . . . . . . . . . . . . . . .
49
4.2
Modello Filamentare . . . . . . . . . . . . . . . . . . . . . . . . . . .
56
4.2.1
Formulazione Matematica del problema . . . . . . . . . . . . .
58
4.2.2
Metodo dei momenti di corrente . . . . . . . . . . . . . . . . .
67
4.2.3
Schema a Blocchi . . . . . . . . . . . . . . . . . . . . . . . . .
71
5 RISULTATI E VALIDAZIONE DEL MODELLO FILAMENTARE 85
5.1
Felix come tool . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
86
5.2
Flusso di una sorgente filamentare . . . . . . . . . . . . . . . . . . . .
87
5.3
I diversi contributi di flusso . . . . . . . . . . . . . . . . . . . . . . .
89
5.4
Confronto tra XLOC, EFIT e Modello Filamentare . . . . . . . . . .
91
5.4.1
Confronto delle mappe di flusso . . . . . . . . . . . . . . . . .
91
5.4.2
Confronto dei parametri geometrici . . . . . . . . . . . . . . .
94
6 RICOSTRUZIONE DI PLASMI PARTICOLARI
103
6.1
Piccoli Plasmi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
103
6.2
Start-up . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
106
6.3
Simulazioni e risultati . . . . . . . . . . . . . . . . . . . . . . . . . . .
111
7 CONCLUSIONI E SVILUPPI FUTURI
116
Appendice A
XLOC: modello numerico
119
Appendice B
Implementazione in real-time
124
Bibliografia
137
Elenco delle figure
141
INDICE
II
Ringraziamenti
Colgo l’occasione per ringraziare le numerose persone a cui sono grato per il lavoro di
tesi svolto. Innanzitutto, ringrazio il Plasma Position and Current Control team del
Centro Ricerche JET di Culham (UK), dove ho svolto i miei 6 mesi di stage.
In particolare, ringrazio il dott. Filippo Sartori per l’accoglienza all’interno del suo
gruppo di collaboratori, il dott. Fabio Piccolo per il costante aiuto burocratico, tecnico e professionale, la dott.ssa Katiuscia Zedda per la condivisione del suo ufficio e
per le piacevoli conversazioni quotidiane.
Infiniti ringraziamenti li esprimo per il dott. Luca Zabeo (che affettuosamente chiamavo boss), a cui devo l’ottima riuscita del tirocinio per tutte le lezioni che mi ha saputo
trasmettere, nonché per la cortesia e la pazienza nel supervisionare questo scritto. Lo
ringrazio per le nozioni che mi ha dato, per il sostegno professionale e morale, per la
sua meticolosa attenzione e il suo altruistico impegno nei miei confronti.
Un pensiero affettuoso va a tutti gli altri ricercatori e colleghi conosciuti, italiani e
non, per l’enorme gentilezza e disponibilità manifestatami con un sincero sorriso sin
dai primi giorni.
Ringrazio il mio relatore prof. Luca Zaccarian per la fiducia che ha riposto in me nel
propormi questa esperienza lavorativa e nel seguirmi con professionalità ed amicizia
durante il suo svolgimento.
INTRODUZIONE
1
INTRODUZIONE
Voglio ringraziare, inoltre, Carlo e Bernardo. Abbiamo condiviso più di 10 anni di
studi insieme e tra dificoltà, gioie, amarezze e soddisfazioni, abbiamo instaurato una
solida e consolidata amicizia.
Un particolare grazie lo rivolgo ai tanti amici sinceri che mi circondano. A loro ho
dedicato questa tesi perché hanno contribuito in maniera impagabile alla serenità, alla
voglia e all’impegno con il quale ho affrontato questi mesi di vita e lavoro all’estero.
Desidero ringraziare la mia famiglia per avermi sostenuto in questa ennesima esperienza. La loro orgogliosa fiducia e stima mi ha incentivato nei momenti difficili.
Ne approfitto per scusarmi con i miei fratelli: con Emanuele, per non essere stato
presente fisicamente il giorno della sua laurea e con Cinzia, per l’assenza durante la
nascita del mio splendido nipotino.
Termino con un ringraziamento incommensurabile ad Elisa, per quello che c’è stato,
che c’è e che ci sarà. Il suo amore e la sua vicina presenza saranno sempre insostituibili.
grazie ancora a tutti,
Luca
INTRODUZIONE
2
Introduzione
La richiesta di energia e, in particolare, la richiesta di elettricità è in continuo aumento. Il carburante fossile, su cui si basa l’attuale sistema di approvvigionamento
energetico, è quasi terminato e la dipendenza mondiale da questa fonte di energia
pesa negativamente sull’ecosistema.
Sebbene le risorse stimate di carbone, petrolio e gas naturale siano ancora ingenti, gli
esperti predicono un’insufficienza energetica in meno di 50 anni. Secondo il presente
ritmo di utilizzo, infatti, si consuma più in fretta rispetto ai tempi di produzione
in natura. Inoltre, il degrado ambientale, dato dall’inquinamento atmosferico, dal
riscaldamento globale, dalla destabilizzazione del sistema climatico mondiale e dall’esaurimento delle limitate risorse naturali, è una motivazione sufficiente per cercare
sorgenti di energia alternative e rinnovabili. Nonostante, però, le fonti rinnovabili di
energia (come biomassa, sole, vento e geotermia) siano interessanti da un punto di
vista ecologico, queste non forniscono una produzione energetica sufficiente a soddisfare le esigenze di fossile del mondo urbanizzato.
La produzione di energia attraverso le reazioni di fusione nucleare rappresenta, invece,
una valida e possibile alternativa. Con questo obiettivo si diffondono e si sviluppano
nuovi centri di ricerca riguardo la fusione nucleare. Il principale al mondo è rappresentato dal polo scientifico JET (Joint European Torus) situato in Culham, Oxfordshire
(Regno Unito).
INTRODUZIONE
3
INTRODUZIONE
Questa tesi è frutto di uno stage semestrale svolto presso questo centro, grazie alla
collaborazione istituitasi tra l’Università di Roma-Tor Vergata e il JET nell’ambito
del progetto europeo “Leonardo”.
L’argomento di tesi consiste nell’analisi e nella sintesi di un algoritmo di stima in
real-time per il controllo della posizione e forma di plasma in una macchina da fusione.
Qusto studio è di interesse e di responsabilità del Plasma Operation Department presso
cui lo studente ha lavorato.
La tesi è strutturata come segue.
Nel primo capitolo vengono introdotti i concetti fisici che sono alla base del funzionamento di un tokamak, con particolare attenzione all’esperimento JET.
Nel secondo capitolo si descrive il sistema di controllo verso cui è finalizzata questa
attività di ricerca.
Nel terzo capitolo si parla del problema della ricostruzione magnetica della colonna
di plasma durante una scarica di corrente. Si fa un primo cenno dei metodi esistenti
per risolvere questo task.
Il quarto capitolo tratta, nella prima parte, la modellazione attualmente in uso presso
la sala controllo del JET e, nella seconda parte, un metodo real-time differente. In
particolare, si presenta il funzionamento e l’implementazione del modello dei filamenti
percorsi da corrente per approssimare e simulare l’effetto magnetico prodotto da tutte
le correnti in gioco durante un’intera fase di plasma.
Nel quinto capitolo vi sono i risultati che hanno permesso di validare il modello filamentare nei confronti degli altri codici utilizzati. Dalle simulazioni presentate, si
evince che il comportamento di questa diversa modellizzazione è simile o persino migliore in determinati aspetti della ricostruzione topologica.
Nel sesto capitolo si presenta una modifica al modello descritto precedentemente.
INTRODUZIONE
4
INTRODUZIONE
Questa variazione permette la ricostruzione della colonna di plasma nelle veloci fasi
di nascita e terminazione dello stesso.
Nelle conclusioni si accennano gli sviluppi futuri che possono essere affrontati partendo dal lavoro descritto.
Per completezza, nelle appendici si riportano il modello numerico polinomiale e la
modalità con la quale è possibile un’implementazione real-time del codice in analisi.
INTRODUZIONE
5
Capitolo 1
LA FUSIONE TERMONUCLEARE
In questo capitolo si presentano i concetti basilari della fusione termonucleare e del confinamento magnetico del plasma. Sebbene questo lavoro di tesi abbia validità generale per le differenti macchine
da fusione esistenti al mondo, un’attenzione particolare è stata data
all’esperimento JET descritto in sezione 1.4.
1.1
Introduzione
La popolazione mondiale è in continuo aumento. Le stime indicano che si arrivi a
10 miliardi di persone nella seconda metà del ventunesimo secolo. Inoltre, i Paesi in
via di sviluppo aspirano sempre più agli standard di vita, alla produttività agricola e
alle caratteristiche industriali dei Paesi sviluppati. Soddisfare questi desideri richiede
una grande disponibilità di energia; dunque, ci si aspetta un aumento sempre più
vertiginoso delle richieste energetiche.
Oggi, la maggior parte di queste richieste è soddisfatta dal petrolio (35 %), gas
(20.7 %), carbone (23.5 %), nucleare (6.8 %) e fonti rinnovabili (meno del 15%). La
figura 1.1 evidenzia l’attuale ripartizione delle risorse energetiche mondiali in base al
proprio utilizzo. Se questa politica dei consumi non cambierà, il petrolio e le risorse
di gas finiranno nell’arco di un paio di generazioni.
6
CAP. 1 LA FUSIONE TERMONUCLEARE
petrolio
11,1%
2,3% 0,5%
35%
6,8%
gas
carbone
nucleare
biomas s a
idroelettricità
23,5%
20,7%
altro (s ole, vento,
geotermia, ...)
Figura 1.1: Utilizzo di energia in base al tipo di risorsa. Dati tratti da [2].
Energia Solare. Ha il vantaggio che è illimitata e non inquinante; sostiene la
biosfera rendendone possibile la vita ma provvede solo al 6 % dell’utilizzo di energia
dell’umanità, principalmente attraverso l’idro-elettricità e la biomassa. Attualmente,
l’elettricità solare diretta soddisfa meno dell’1 % dei bisogni mondiali. Questa bassa
percentuale è principalmente dovuta agli alti costi di raccolta, trasmissione e conversione di questa energia. Infatti, l’efficienza delle attuali foto-celle è inferiore al 20 %
e il loro costo è più di dieci volte quello del fossile comune o delle centrali nucleari.
Altri problemi, che ne precludono un significativo sviluppo, sono il suo immagazzinamento per l’utilizzo notturno e l’impatto ambientale degli impianti necessari.
Energia Eolica. È abbondante, rinnovabile, largamente distribuita, pulita dal
punto di vista delle emissioni tossiche e dei gas serra. Nonostante questo, però, la sua
intermittenza crea un problema insormontabile, tanto da non poter superare il 10 %
della richiesta totale di energia.
Molti problemi tecnologici sono stati risolti: efficienza delle turbine in termini di potenza, effetto visivo ed acustico sull’ambiente, studio sulla velocità del vento in aree
ristrette, costi per un’efficiente trasmissione a media e lunga distanza di potenza in
eccesso quando il vento non soffia, etc... Il vento presenta, però, anche sfide ingegne7
CAP. 1 LA FUSIONE TERMONUCLEARE
ristiche che non sono state ancora del tutto risolte. Persino una buona area non ha
vento sufficiente a muovere le turbine se non per un solo 30 % del tempo (altre fonti
sono necessarie per colmare il restante 70 % di richiesta).
Processo Nucleare. Fornirebbe energia sufficiente alla potenziale richiesta della
popolazione mondiale ma richiede decenni di ricerca e sviluppo per diventare realtà.
In tabella 1.1 vengono elencate le principali fonti energetiche considerate.
Risorsa
Disponibilità
Carbone
220 anni
Petrolio
35 anni
Gas Naturale
60 anni
Fissione
45 anni
Idro-elettricità
Vento
Geotermia
Solare
Vantaggi
abbondante
flessibile per i molti
prodotti derivati,
trasportabile
brucia in maniera pulita,
trasportabile
pulita, no CO2 ,
trasportabile
molto
pulita,
utilizzata
no CO2
basso
pulito,
utilizzo
basso
utilizzo
no CO2
pulita,
no CO2
poco
pulito,
sfruttato
no CO2
Svantaggi
brucia in maniera sporca,
causa piogge acide,
inquinamento dell’aria,
produzione di CO2
scorte limitate,
inquinamento dell’aria,
produzione di CO2
scorte limitate,
produzione di CO2
smaltimento dei rifiuti,
sicurezza dell’impianto,
costruzione di dighe,
impatto ambientale,
limitata geograficamente
molti impianti necessari
per le potenze richieste,
limitato geograficamente
limitata geograficamente
molte celle solari per
le potenze richieste,
limitato geograficamente
Tabella 1.1: Risorse energetiche attuali con relativi vantaggi e svantaggi [1].
8
CAP. 1 LA FUSIONE TERMONUCLEARE
1.2
Principi di fusione nucleare
Ci sono due modi per ottenere energia nucleare: trasformando nuclei pesanti in nuclei
di dimensioni più ridotte (fissione dell’uranio) o fondendo nuclei leggeri in nuclei più
pesanti.
Fissione Nucleare. È una tecnologia consolidata che produce energia attraverso
la separazione di atomi pesanti, come l’uranio, in una reazione a catena controllata.
Sfortunatamente, i prodotti risultanti dalla fissione sono altamente radioattivi e di
lunga durata.
Tecnicamente, la potenzialità di utilizzare la fissione come risorsa di energia a lungo
termine è stata dimostrata e l’impatto ambientale considerato. Il suo sviluppo, però,
dipende essenzialmente dall’apprezzamento o meno dell’opinione pubblica. Nel passato, infatti, l’energia nucleare basata sulla fissione è stata adottata da molte nazioni
e un gran numero di Paesi sviluppati o in via di sviluppo la considerano, tutt’ora,
come un elemento vitale per il proprio fabbisogno energetico attuale e futuro.
Fusione Nucleare. Può essere una sorgente di energia pressoché illimitata.
La fusione ha molti vantaggi: il carburante che la alimenta è praticamente infinito e il problema della contaminazione radioattiva è meno pericoloso di quello della
fissione. Un reattore da fusione è un sistema intrinsecamente sicuro perché ogni
malfunzionamento comporta solo una rapida interruzione del processo.
Il principale carburante è il trizio, la cui leggera radioattività ha un periodo di
dimezzamento di soli 12.4 anni. I prodotti di scarto del processo sono isotopi di elio
non radioattivo. Nonostante la contaminazione che subirebbero i reattori, dopo 100
anni il livello di radioattività sarebbe confrontabile con quello di una convenzionale
centrale termica, ammesso che vengano utilizzati materiali a bassa attivazione per
9
CAP. 1 LA FUSIONE TERMONUCLEARE
la loro costruzione. Con materiali costruttivi appropriati, gli scarti della fusione potrebbero essere posti in appositi luoghi e decadere a livelli innocui nell’arco di pochi
decenni.
Qualsiasi produzione di energia da reazione nucleare è basata sulle differenze nell’energia di legame a livello nucleare. Quando nuclei pesanti si dividono o due atomi
leggeri si uniscono per formarne uno più pesante, l’energia di legame dei nuclei ricombinati può essere più forte della somma dei legami dei nuclei di partenza. In questi
casi, il nucleo ricombinato è in uno stato di energia inferiore rispetto a quello dei
nuclei separati e questa differenza di energia viene rilasciata nel processo.
In una reazione di fusione, gli atomi leggeri sono fusi insieme per formare un atomo
più pesante avente massa più piccola della somma delle masse individuali e, conseguentemente, viene rilasciata una grande quantità di energia. La differenza di massa
corrisponde all’energia nucleare di legame secondo la relazione energia-massa di Einstein: E = m · c2 .
Nella gran parte delle reazioni nuclerari, l’energia rilasciata è molto più grande delle
reazioni chimiche, poiché l’energia di legame che tiene insieme un nucleo è di gran
lunga più grande di quella che tiene vincolati gli elettroni al proprio nucleo.
Nella fusione nucleare, due nuclei di elementi leggeri reagiscono e si fondono a
formare nuove particelle energetiche. Per mantenere questo nuovo assetto, deve essere
vinta la forza repulsiva di Coulomb. Ciò accade solo se le particelle collidono a velocità
molto elevata, il che significa che la temperatura del gas deve essere molto alta: sono
richieste temperature superiori ai 100 milioni di Kelvin.
Se un gas viene scaldato a questa temperatura, gli elettroni si separano dai propri
atomi (i quali diventano ioni) e insieme formano un gas di particelle cariche, nel quale
elettroni e nuclei si muovono in maniera indipendente. In questi due fluidi misti di
10
CAP. 1 LA FUSIONE TERMONUCLEARE
ioni ed elettroni sono consentiti solo piccoli squilibri di carica dovuti all’attrazione
elettrostatica. Il risultato è che il gas ionizzato resta perlopiù neutro: questo stato è
chiamato plasma.
Il plasma è spesso definito come quarto stato della materia per distinguerlo dal
solido, fluido e gassoso. Nell’universo, più del 99.9 % di tutta la materia si trova nello
stato di plasma. Il sole, le stelle e le nebulose sono esempi di plasma.
1.2.1
Fusione sul Sole e sulla Terra
La fusione è la sorgente di energia di sole e stelle. Qui, la reazione di fusione è un
processo a più passi. In primo luogo, due nuclei di idrogeno reagiscono per formare
un deuterio e un positrone. Dopo questo processo estremamente lento, il deuterio
reagisce in pochi secondi per formare un nucleo di isotopo dell’elio (3 He). Un milione
di anni più tardi, due nuceli di 3 He finalmente interagiscono per formare un nucleo di
4
He. L’energia totale rilasciata in questa sequenza è 6 · 1014 Joule per Kg di idrogeno
o 6 · 107 volte l’energia disponibile da una reazione chimica.
Ogni secondo, il sole trasforma 600 milioni di tonnellate di idrogeno in elio, irradiando
energia ad un ritmo di 3.9 × 1026 W. L’energia rilasciata nel sole si espande sotto
forma di luce e solo una miliardesima parte di questa luce illumina la Terra e ne permette la vita.
Contrariamente a quanto si possa intuire, il sole brucia piuttosto lentamente.
Un metro cubo del centro del sole produce solo 30 watt, sufficienti appena ad alimentare una lampadina. La materia nel nocciolo del sole raggiunge una densità,
una pressione e una temperatura sufficienti ad innescare le reazioni termonucleari; il
plasma incandescente è confinato per gravità.
Il primo problema, legato alla fusione sulla Terra, consisteva nel come ricreare il
11
CAP. 1 LA FUSIONE TERMONUCLEARE
fenomeno esposto in una centrale e con un processo più veloce. Inoltre, la ricerca in
campo termonucleare era mirata a dimostrare come questa fonte energetica potesse
essere utilizzata per produrre elettricità, ovunque e in sicurezza.
Sebbene molte differenti reazioni di fusione siano possibili, solo poche sono interessanti
per la fusione sulla Terra. Dapprima, vennero provate reazioni tra deuteri, poi è stata
scelta la più veloce reazione tra deuterio e trizio. Infatti, utilizzando deuterio e litio
nei reattori a fusione deuterio-trizio di prima generazione, si potrebbe provvedere a
tutti i bisogni energetici di una popolazione mondiale di 10 miliardi di persone per
circa 700 anni.
Figura 1.2: Reazione nucleare D-T. Deuterio: un isotopo pesante dell’idrogeno con
un protone e un neutrone. Trizio: è l’isotopo d’idrogeno più pesante, ha due neutroni.
In questa reazione, si forma sia elio sia neutroni:
D + T −→4 He (3.5M eV ) + n (14.1M eV )
(1.2.1)
Con una fusione di seconda generazione, basata sulla reazione deuterio-deuterio,
la provvista di deuterio nei mari basterebbe per centinaia di millenni. Il trizio, però,
non è presente in natura in quantità considerevoli. Tuttavia, può essere prodotto
12
CAP. 1 LA FUSIONE TERMONUCLEARE
utilizzando le reazioni che avvengono tra neutroni formati nelle reazioni nucleari e il
metallo leggero litio. Questo riutilizzo dei neutroni è evidenziato anche in figura 1.2.
Le reazioni D-T di equazione (1.2.1) sono più semplici per la produzione di energia
rispetto al puro deuterio. Inoltre, sebbene la reazione che avverrebbe in un reattore
sia tra deuterio e trizio, i combustibili sarebbero, in realtà, deuterio e litio, come
descritto nella seguente formula (6 Li e 7 Li indicano due differenti isotopi del litio):
Li + n −→ T +4 He
7
Li + n −→ T +4 He + n
6
(1.2.2)
Le riserve mondiali di litio sono tali che gli attuali livelli di elettricità prodotta potrebbero essere mantenuti per molte centinaia di anni con l’energia dei reattori a fusione.
Anche se la reazione fusionistica più accessibile e promettente è il processo D-T, di
solito, nei reattori sperimentali si evita l’uso del trizio per la sua radioattività e viene
usato solo deuterio per ragioni di sicurezza. In questo caso, l’energia prodotta è più
che dimezzata (7.3 MeV).
La maggior parte dell’energia rilasciata viene trasportata dai neutroni ad alta velocità.
In una fusione termonucleare, un rivestimento intorno al reattore rallenterebbe i neutroni per convertire la loro energia in calore. Questo calore potrebbe essere raccolto
per produrre il vapore necessario alla normale produzione di elettricità.
Riassumendo, la realizzazione della fusione controllata è estremamente ambiziosa
ma una centrale a fusione produrrebbe rifiuti radioattivi a basso livello e di breve durata. A differenza della fissione, infatti, la fusione non presenta rischi di un incidente
nucleare; non produce inquinamento dell’aria o gas serra durante il normale funzionamento poiché il prodotto della reazione è sostanzialmente elio. La radioattività è data
esclusivamente dai materiali resi radioattivi per via del bombardamento di neutroni,
ma ciò può essere minimizzato da un’attenta scelta dei materiali utilizzati. Inoltre,
13
CAP. 1 LA FUSIONE TERMONUCLEARE
la gran parte di questi materiali contaminati può essere smaltita in maniera sicura e
facile nell’arco di tempi-vita umani, a differenza dei sotto-prodotti della fissione che
richiedono stoccaggi e trattamenti particolari per centinaia di anni.
I requisiti per un riuscito esperimento di fusione termonucleare sulla Terra sono:
• un’alta densità di particelle che interagiscono e collidono tra loro;
• un’alta temperatura di plasma, altrimenti le particelle che si scontrano non sono
sufficientemente forti da penetrare la barriera elettrica che tende a mantenerle
separate;
• un lungo tempo di confinamento dell’energia.
Quest’ultimo punto rappresenta proprio uno dei problemi maggiori: contenere a lungo
il plasma surriscaldato tanto da assicurare che la sua densità e temperatura rimangano
sufficientemente alte per fondere il carburante. È ovvio che un contenitore solido non
può resistere alle temperature richieste: sono necessarie tecniche di confinamento
appropriate.
1.3
Il confinamento magnetico
Per controllare i plasmi alle temperature fusionistiche necessarie, sono stati sviluppati
tre approcci differenti:
• confinamento gravitazionale: è il metodo utilizzato dal sole. Le forze gravitazionali all’interno delle stelle mantengono compressa la materia (essenzialmente
idrogeno) che può raggiungere densità e temperature molto elevate. Si innescano così le reazioni nucleari che vengono tenute sotto controllo dal campo
gravitazionale stesso che bilancia inoltre le forze di espansione termica;
14
CAP. 1 LA FUSIONE TERMONUCLEARE
• confinamento inerziale: il combustibile nucleare può essere compresso fino all’ignizione con un bombardamento di fotoni, di altre particelle o, alternativamente,
attraverso un’esplosione. Nel caso dell’esplosione, il tempo di confinamento risulterà essere abbastanza breve. Questo è il processo usato nella bomba all’idrogeno, in cui una potente esplosione provocata da una bomba a fissione nucleare
comprime un piccolo cilindro di combustibile per fusione. Nella bomba all’idrogeno, l’energia sviluppata da una testata nucleare a fissione viene utilizzata
per comprimere il combustibile, solitamente un miscuglio di deuterio e trizio,
fino alla temperatura di fusione. L’esplosione della bomba a fissione genera una
serie di raggi X che creano un’onda termica. Questa si propaga nella testata,
comprime e riscalda il deuterio e il trizio generando la fusione dei nuclei.
• confinamento magnetico: in linea di principio il plasma, essendo costituito da
particelle cariche, può essere confinato mediante un opportuno campo magnetico. In assenza di questo campo le particelle si muoverebbero a caso in tutte le
direzioni, urterebbero le pareti del recipiente e il plasma si raffredderebbe inibendo la reazione di fusione. Un’opportuna configurazione di campi magnetici
esterni e/o prodotti da correnti circolanti nel plasma, invece, può costringere le
particelle a seguire traiettorie a spirale intorno alle linee di forza, impedendone
il contatto con le pareti del recipiente.
Negli ultimi 50 anni, sono stati investigati un gran numero di differenti schemi
di confinamento. I primi studi riguardavano dispositivi lineari, ma vi erano eccessive
perdite di energia alle estremità che ne impedivano un tempo di confinamento dell’ordine di qualche secondo. Queste perdite vennero completamente evitate con la
configurazione toroidale, il cui approccio più promettente sembrò essere il Tokamak.
15
CAP. 1 LA FUSIONE TERMONUCLEARE
1.3.1
TOKAMAK
Le ricerche di fusione nucleare a scopi pacifici con l’utilizzo dei Tokamak iniziarono
negli anni ’50 nell’ex-Unione Sovietica. Il Tokamak è l’acronimo russo di Camera Toroidale con Bobine Magnetiche (TOroidalnaya KAmera I MAgnitnaya Katiushka).
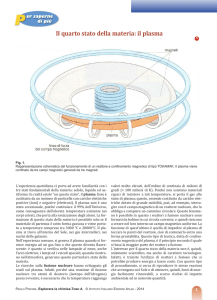
Figura 1.3: Configurazione magnetica di un Tokamak.
Si tratta di un dispositivo di forma toroidale caratterizzato da un involucro cavo,
costituente la “ciambella” (figura 1.3), in cui il plasma è confinato mediante un campo
magnetico con linee di forza a spirale. Questa configurazione magnetica è ottenuta mediante la combinazione di un intenso campo magnetico toroidale (prodotto da
bobine magnetiche poste intorno alla ciambella), con un campo magnetico poloidale
(realizzato mediante la corrente indotta nel plasma dall’esterno). Il campo poloidale
è necessario per evitare la deriva delle particelle del plasma verso le pareti del recipiente. Le particelle del plasma si avvitano intorno alle linee di forza del campo,
come rappresentato in figura 1.4. La combinazione dei due campi produce una geome-
16
CAP. 1 LA FUSIONE TERMONUCLEARE
tria elicoidale del campo risultante e le linee di campo formano superfici magnetiche
chiuse che non intersecano le strutture dei materiali circostanti. Come risultato, le
particelle del plasma si muovono lungo queste linee magnetiche ad elica in piccole
orbite ruotanti. Ciò limita il loro movimento radiale e ne favorisce il confinamento.
Figura 1.4: a) Il gas non è confinato ed è libero di muoversi. b) Il campo magnetico
costringe le particelle ionizzate a seguire traiettorie a spirale intorno alle linee di forza,
impedendone il contatto con le pareti del vessel.
Bobine supplementari esterne vengono utilizzate per realizzare campi magnetici
ausiliari che controllano la posizione e la forma del plasma nella camera.
Essendo il plasma un conduttore elettrico, è possibile riscaldarlo mediante una corrente indotta dall’esterno: il plasma nella ciambella si comporta come una spira cortocircuitata che costituisce il secondario di un trasformatore, il cui primario è all’esterno.
La corrente indotta ha così il duplice scopo di creare il campo poloidale e di riscaldare
il plasma a temperatura elevata. Questo tipo di riscaldamento è detto riscaldamento
Ohmico o resistivo. Un limite al riscaldamento Ohmico è dato dal fatto che la resistività del plasma decresce al crescere della temperatura; la massima temperatura
17
CAP. 1 LA FUSIONE TERMONUCLEARE
ottenibile nel plasma è di alcuni milioni di gradi.
Per raggiungere le temperature richieste per la fusione termonucleare è necessario,
quindi, ricorrere ad un riscaldamento supplementare, che si può realizzare:
• per assorbimento nel plasma di onde elettromagnetiche tramite apposite antenne
(Radio-Frequency Heating);
• per iniezione di atomi neutri di elevata energia cinetica che attraversano il campo
magnetico, vengono ionizzati e trasferiscono per collisione la loro energia al
plasma (Neutral Beam Heating);
• per compressione adiabatica del plasma, ottenuta spostando il plasma verso
regioni a campo magnetico più forte, con conseguente riscaldamento.
La figura 1.5 schematizza i principali sistemi di riscaldamento della colonna di plasma,
Ohmico e supplementari.
Figura 1.5: Schematizzazione dei principali metodi di riscaldamento del plasma.
In tabella 1.2, invece, vengono elencati i principali tokamak operativi nel mondo, con
particolare attenzione a quelli che lavorano nel campo di ricerca dei controlli avanzati.
La tabella è tratta da [1].
18
CAP. 1 LA FUSIONE TERMONUCLEARE
Nome Tokamak
ASDEX-Upgrade
Alcator C-Mod
DIII-D
Experimental Advanced
Superconducting
Tokamak (EAST)
Luogo
Garching, Germania
Cambridge, USA
San Diego, USA
Anno
1991
1993
1986
Hefei, Cina
2006
Hefei Tokamak-7 (Ht-7)
Hefei, Cina
1994
Frascati, Italia
1990
Padova, Italia
1992
Culham, UK
1983
Naka, Giappone
1991
Frascati Tokamak
Upgrade (FTU)
Reverse Field
Experiment (RFX)
Joint European Torus
(JET)
JAERI Tokamak-60
Upgrade (JT-60U)
Korea Superconducting
Tokamak Advanced
Reactor (KSTAR)
Mega-Amp Spherical
Tokamak (MAST)
National Spherical Torus
Experiment (NSTX)
Steady-State (SST-1)
Tokamak à Configuration
Variable (TCV)
Tore Supra
T-10
Daejon,
2007
Corea del Sud
Caratteristiche
pareti di tungsteno
pareti di molibdeno
molte forme di plasma
tutte le bobine
a superconduttore
bobine toroidali a
superconduttore, no AT
macchina ad
alto campo magnetico
il più grande
Reverse Field Pinch
il più grande al
mondo, nucleo in ferro
il più grande tokamak
con il nucleo in aria
tutte le bobine
a superconduttore
Culham, UK
1999
tokamak sferico
Princeton, USA
1999
tokamak sferico
Gandhinagar, India
2005
Losanna, Svizzera
1992
Cadarache, Francia
1988
Mosca, Russia
1975
a superconduttore
elongazione maggiore
tra tutti i tokamak
impulsi molto lunghi
il tokamak russo
più produttivo, no AT
Tabella 1.2: Tabella dei principali “Advanced Tokamak” (AT) sparsi nel mondo.
19
CAP. 1 LA FUSIONE TERMONUCLEARE
1.3.2
Configurazioni di plasma
Nel corso dei vari esperimenti con i tokamak, si è osservato che il vessel non è sufficiente per mantenere confinato il plasma, occorre anche limitarlo con una struttura
metallica interna alla camera. Infatti, la diffusione radiale delle particelle e il calore
che attraversa il campo magnetico portano ad espansioni di plasma fino all’interazione
con la parete. La regione di contatto, chiamata limiter e mostrata in figura 1.6(a),
deve essere opportunamente disegnata per prevenire eccessive erosioni di materiale.
Figura 1.6: (a) Configurazione di plasma limiter. (b) Configurazione a divertore.
In altre parole, il limiter meccanico protegge la camera dal bombardamento del
plasma e aiuta a definirne il bordo. Ciò nonostante, le particelle che collidono con
la struttura limiter sono ad alto livello di energia e possono dunque erodere atomi di
materiale dalla superficie metallica. Per questo motivo è importante scegliere opportunamente i materiali costruttivi (tungsteno, molibdeno o grafite) in virtù della loro
durezza, carico di potenza e facilità sostitutiva. Allo stesso tempo, è necessario un
efficiente pompaggio per rimuovere le impurezze create dall’erosione e per mantenere
pulito il plasma. Questi propositi hanno portato allo sviluppo di un’interfaccia tra
plasma e componenti di prima superficie senza l’utilizzo di un limiter meccanico: il
divertore magnetico (un esempio è in figura 1.7).
20
CAP. 1 LA FUSIONE TERMONUCLEARE
Figura 1.7: Esempio di divertore in un tokamak.
Il divertore è una struttura che crea una configurazione magnetica dove il livello
esterno delle linee magnetiche è portato via dal plasma principale e raccolto in un apposito piatto. Questo divertore poloidale è ottenuto posizionando molte bobine vicino
alla superficie del plasma con una corrente parallela a quella di plasma e che scorre
in direzione opposta: ciò genera un campo locale che si oppone a quello poloidale. Di
conseguenza, il campo magnetico risultante è localmente caratterizzato dalla presenza
di un punto di nullo (X-Point), il quale dà adito ad una separatrix (guardare schematizzazione di figura 1.6(b) e simulazione 1.9). Utilizzando questa configurazione,
le particelle e l’energia fluiscono dal plasma principale lungo le linee di campo verso
una regione separata di divertore, dove le particelle vengono neutralizzate.
Le linee magnetiche esterne alla frontiera del plasma collidono sui piatti di raccolta
del divertore, i quali sono equipaggiati di pompe a criocondensazione per impedire
che rientrino nel plasma. Inoltre, si sottolinea che la temperatura di plasma nel divertore è più bassa rispetto a quella della separatrice vicino al plasma. Come risultato,
il danno dell’erosione di parete prodotto dagli ioni può essere fortemente ridotto e
plasmi più puliti sono quindi ottenibili in confronto alla configurazione di limiter.
21
CAP. 1 LA FUSIONE TERMONUCLEARE
Figura 1.8: Esempio di una configurazione limiter. Questa figura è tratta dal database
del JET ed è la ricostruzione secondo il codice EFIT della scarica n◦ 49165.
Plasma in X−Point per l’impulso n° 61153
2
1.5
1
0.5
Z [m]
0
−0.5
−1
−1.5
−2
0.5
1
1.5
2
2.5
3
R [m]
3.5
4
4.5
5
5.5
Figura 1.9: Esempio di una configurazione X-Point. Questa figura è la ricostruzione
secondo il codice FELIX della mappa di flusso della scarica n◦ 61153.
22
CAP. 1 LA FUSIONE TERMONUCLEARE
1.4
Esperimento JET
Costruito nei primi anni ’80, il Joint European Torus Tokamak è stato disegnato per
permettere gli studi del comportamento del plasma in prossimità del break-even, la
condizione nella quale il rapporto tra potenza di fusione prodotta e quella di calore
in ingresso è pari ad 1.
Questo impianto a fusione, non solo è il più grande al mondo capace di lavorare con
miscele di deuterio e trizio, ma ha raggiunto tutti gli obiettivi scientifici prefissati.
Ha conseguito, nel 1997, il record mondiale di 16 MW di produzione di potenza dai
26 MW di riscaldamento in ingresso. Ciò corrisponde ad un fattore di amplificazione
(Q) pari allo 0.6. Questo obiettivo è stato raggiunto utilizzando un plasma D-T.
Figura 1.10: Vista generale del JET Tokamak e struttura di supporto in ferro.
Il rendimento di fusione di una centrale viene determinato da questo indice che
rappresenta il rapporto tra la potenza generata dalla reazione e quella iniettata nel
plasma. Quando tutte le perdite nel plasma sono controbilanciate dal riscaldamento
prodotto dalle particelle alfa e non si ha più bisogno di immettere potenza esterna,
23
CAP. 1 LA FUSIONE TERMONUCLEARE
il plasma ha raggiunto la condizione in cui la reazione si auto-sostiene e richiede
solamente l’introduzione continua di combustibile (fase di ignizione: Q = ∞).
Il JET è una macchina ad impulsi; ciò significa che ad ogni esperimento si devono
completare le fasi di iniezione del carburante, di reazione indotta e di fine scarica. La
lunghezza di un impulso è di circa 40 sec., mentre il tempo di attesa necessario tra
due esperimenti è di circa 30 min. Altre caratteristiche sono riportate in tabella 1.3.
Parametro della macchina
Raggio maggiore dell’anello
Raggio minore dell’anello
Campo toroidale
Volume del plasma
Corrente di plasma
Riscaldamento supplementare
Densità media del plasma
Temperatura di plasma
Tempo di confinamento dell’energia
Record di potenza generata
Valore
2.96 m
1.25 m
fino a 4 T
80m3
fino a 6 MA
fino a 30 MW
fino a 1020 m−3
∼ 300 million ◦ C (30 keV)
∼ 1 sec
16 MW
Tabella 1.3: Dettagli tecnici del JET.
Figura 1.11: Sulla sinistra, si possono individuare le carbon tiles che proteggono la
colonna centrale, il divertore e una delle antenne del riscaldamento addizionale.
Sulla destra, vi è un’immagine della camera da vuoto in presenza di plasma.
24
Capitolo 2
IL SISTEMA DI CONTROLLO NEL
JET
Questo capitolo descrive i sistemi di controllo presenti al JET. Viene posta particolare attenzione al controllo di posizione e forma del
plasma all’interno del vessel.
2.1
Principali sistemi di controllo
Le prestazioni di un plasma sono definite da una serie di parametri che coinvolgono
aspetti geometrici, quali forma e posizione, e di stato, quali temperatura, densità,
etc. Per poter ottenere le massime prestazioni, è dunque essenziale avere un sistema
di controllo in grado di portare il plasma ai parametri desiderati. Questo può essere
fatto agendo sul plasma con appropriati attuatori posti a ciclo chiuso per ottenere i
valori desiderati dei parametri. I principali sistemi di controllo utilizzati al JET sono
divisibili in due categorie:
• controllo magnetico: agisce sulle proprietà macroscopiche del plasma, come
la posizione, la forma e la corrente totale, che sono relazionate al campo magnetico e all’azione delle bobine circostanti. Il sistema in uso prende il nome di
Plasma Position and Current Control (PPCC). È costituito da due sistemi in-
25
CAP. 2 IL SISTEMA DI CONTROLLO NEL JET
dipendenti: lo Shape Controller (SC) e il sistema per la Vertical Stabilisation. Il
primo controlla la forma e la corrente di plasma alle basse frequenze; il secondo
stabilizza verticalmente il plasma.
• controllo cinetico: è finalizzato alle caratteristiche interne del plasma, come
la temperatura e la densità; fa uso di sistemi di riscaldamento addizionale e di
iniezione di gas specifici. Il sistema in uso prende il nome di Plasma Density
Feedback (PDF) e Real Time Central Controller (RTCC).
APPLICAZIONI. Il lavoro di questa tesi si collega principalmente al problema del
controllo di forma e posizione del plasma mediante attuatori magnetici (si rimanda
alla bibliografia [3] per lavori sul controllo cinetico) e trova applicazioni principali nei
sistemi:
a) (Extreme-)Shape Controller (X-SC): il codice descritto nel capitolo 4 fa uso di
misure magnetiche in real-time per ricostruire la mappa di flusso all’interno del
vessel. Dopo aver calcolato un certo numero di parametri geometrici, fornisce tali
infomazioni al sistema di controllo che le processa per regolare gli attuatori (vedere
per i dettagli [4]).
b) Walls: è un sistema di safety progettato per proteggere determinate aree della
prima parete e dei divertori da un eccesso di deposito di potenza di plasma. Inoltre,
previene il fatto che il plasma raggiunga aree non protette. Per far questo, utilizza
anch’esso opportuni riferimenti geometrici forniti dal codice sviluppato (vedere per
i dettagli [5]).
c) Beta-Li: utilizza la mappa di flusso per calcolare più di 100 valori geometrici di
plasma e descriverne, così, la frontiera. Sulla curva chiusa risultante, computa poi
26
CAP. 2 IL SISTEMA DI CONTROLLO NEL JET
i tre integrali di Shafranov del campo magnetico e il momento di secondo ordine
della corrente di plasma (vedere per i dettagli [6]). Con queste informazioni, ricava
il parametro poloidale β e l’induttanza interna Li, insieme agli altri parametri di
confinamento necessari per la valutazione delle prestazioni del plasma.
GLI ATTUATORI. I sistemi che creano il campo magnetico necessario al controllo magnetico sono due:
1. il campo toroidale (TF): consiste di 32 bobine, ognuna con 24 spire. La massima
corrente è limitata a 75 kA, fornendo un campo massimo di 4 T al centro della
camera. Del TF è possibile solo il controllo di velocità di salita della corrente;
2. il campo poloidale (PF): prodotto da 8 bobine (P 1 ÷ P 4 + D1 ÷ D4). Ad
eccezione delle quattro di divertore, ciascun’altra coil può avere un funzionamento magnetico differente in base al raggruppamento di spire che la costituisce.
Per questa caratteristica, si distingue una simmetria top-down e interna-esterna
rispetto alla camera da vuoto (figura 2.1). Il numero totale di queste parti indipendenti di bobine è 22. In tabella 2.1 sono elencati i 10 circuiti di PF, le bobine
che li costituiscono e i parametri geometrici che maggiormente influenzano. Ad
eccezione dell’amplificatore FRFA (Fast Radial Field Amplifier ), gli altri circuiti
servono per definire la forma e la posizione della colonna di plasma.
I CIRCUITI DI PF. Nel seguito si presentano gli schemi dei circuiti che creano
il campo poloidale e si evidenzia il loro principale contributo sul controllo di plasma.
? Primary P1 e Vertical Field P4 (modellizzato in due circuiti separati chiamati Vertical Upper e Vertical Lower ), figura 2.2(a), permettono di ottenere plasmi
circolari, svolgendo le seguenti funzioni:
27
CAP. 2 IL SISTEMA DI CONTROLLO NEL JET
TF
Figura 2.1: Sezione poloidale del tokamak JET per evidenziare le bobine PF e rappresentazione equivalente in 3D. In verde viene mostrata una delle bobine relative al
campo toroidale.
Circuito
Bobine
P3MU P1EU P1CU
P1CL P1EL P3ML
P2SUI P2SUE P3SU
SHAPE
P3SL P2SLE P2SLI
PFX
P1CU P1CL
VERTICAL FIELD
P4U + P4L
RADIAL FIELD
P4U - P4L
P2RU P3RU
FRFA
P3RL P2RL
PRIMARY P1
DIVERTORS
1-2-3-4
D1 D2 D3 D4
Parametri
Ip
RIG
ROG, RIG, Rp
TOG, Zp
stabilità
verticale
Rx e Z x
RSI e ZSI
RSO e ZSO
Tabella 2.1: La tabella riassume i 10 circuiti del campo poloidale, le 22 parti di bobine
che li costituiscono e i 9 parametri geometrici di plasma che ne subiscono gli effetti.
La suddivisione di alcune bobine implica l’uso delle seguenti desinenze: U: upper, L:
lower, I: internal, E: external.
28
CAP. 2 IL SISTEMA DI CONTROLLO NEL JET
• breakdown: fase in cui si crea variazione di flusso all’interno della macchina
tramite la scarica del circuito P1, si forma un campo elettrico toroidale, il gas
viene iniettato, si ionizza ed avviene l’innesco del plasma;
• plasma current ramp-up: fase di salita della corrente di plasma. La rapidità
con la quale essa aumenta è funzione del tempo di decadimento del circuito
P1;
• riscaldamento Ohmico del plasma secondo il principio del trasformatore: il
circuito svolge la funzione di avvolgimento primario e il plasma quello di
secondario;
• controllo orizzontale della posizione del plasma: la corrente che scorre nel
circuito P4 è opposta in segno alla corrente di plasma per creare una forza
verso l’interno che si oppone alla forza di espansione del plasma.
? Shape e PFX, figura 2.2(b), agiscono sui seguenti parametri geometrici:
• elongazione: fenomeno di stiramento verticale del plasma. Viene ottenuto
facendo scorrere corrente nella bobina P2 con lo stesso segno di quella di
plasma e nella P3 con il segno opposto;
• triangolarità: asimmetria tra parte interna ed esterna della colonna di plasma;
• separatrix (di solito insieme alle bobine del divertore): sezione 1.3.2.
? FRFA, figura 2.2(c), permette di ottenere la stabilità verticale per i plasmi elongati
tramite un campo radiale che ne impedisce il naturale spostamento verticale.
? DIVERTORS 1-2-3-4 e P4 IMBALANCE, figura 2.2(d), permettono di:
• ottenere plasmi in configurazione ad X-Point tramite il controllo di posizione
degli strike-points (sezione 1.3.2);
29
CAP. 2 IL SISTEMA DI CONTROLLO NEL JET
• operare una compensazione del campo radiale;
• compensare le correnti parassite1 presenti sulla struttura di divertore durante
la veloce fase di salita della corrente. A differenza delle altre bobine, quelle
relative ai divertori sono posizionate all’interno del vessel.
IL CONTROLLORE. Ci sono tre principali obiettivi del controllo di posizione e
forma. Il primo è di mantenere il plasma all’interno del vessel. I plasmi sono, infatti,
soggetti a forze che tendono ad espanderlo radialmente verso l’esterno. Un campo
verticale deve essere quindi generato dalle bobine per procurare una forza verso l’interno. Un secondo obiettivo è di ottenere specifiche forme di plasma per soddisfare
determinati prequisiti dell’esperimento. Per esempio, si è dimostrato che plasmi verticalmente elongati (alti e stretti) permettono di mantenere pressioni molto maggiori
(forma a D). Il processo di elongazione, però, crea una configurazione magnetica che
causa instabilità verticali (lungo la direzione z ) al plasma. Dunque, il terzo obiettivo
è di stabilizzare questo fenomeno (tramite l’amplificatore dedicato FRFA).
Il JET Shape Controller (e in maniera analoga la sua versione estesa XSC) permette di impostare un ampio insieme di parametri geometrici ed elettromagnetici,
adattando la fase dell’impulso con le specifiche dell’esperimento e con la configurazione di plasma richiesta. Prima della formazione del plasma, lo SC guida i circuiti
poloidali a seguire un prefissato insieme di forme d’onda pre-programmate, le quali
stabiliscono le condizioni per un break-down ben riuscito. In seguito, si crea una piccola colonna di plasma che si espande lentamente all’interno della camera. In questa
1
Le correnti parassite o correnti di eddy (dall’inglese “vortice”) sono delle correnti indotte in masse
metalliche conduttrici che si trovano immerse in un campo magnetico variabile o che, muovendosi,
attraversano un campo magnetico costante o variabile. In ogni caso la variazione del flusso magnetico
genera queste correnti. Gli elettroni, muovendosi in vortici, generano a loro volta un campo magnetico in direzione opposta al campo magnetico applicato e causano perdite di energia riscaldando il
conduttore per effetto Joule.
30
CAP. 2 IL SISTEMA DI CONTROLLO NEL JET
(a) Primary P1 e Vertical Field P4
(c) FRFA
(b) Shape e PFX
(d) DIVERTORS 1-2-3-4 e P4 IMBALANCE
Figura 2.2: Schematizzazione dei 10 circuiti di campo poloidale.
31
CAP. 2 IL SISTEMA DI CONTROLLO NEL JET
fase, poiché è difficile determinare con precisione la forma di plasma, lo SC chiude il
loop solo con la corrente di plasma e la posizione radiale. Un miglioramento a questa
situazione verrà descritto nel capitolo 6 e costituisce parte integrante del lavoro svolto
al JET.
La fase principale dell’esperimento inizia tipicamente dopo che il plasma è stato confinato in una superficie chiusa e per questo motivo è bene riuscire ad ottenere questa
situazione il prima possibile e con la massima accuratezza possibile. L’identificazione
della posizione del plasma avviene mediante i cosiddetti gaps. Per gap si intende il
punto di intersezione tra il bordo del plasma e un determinato segmento. L’insieme
di più gap permette di identificare completamente forma e posizione del plasma come
mostrato in figura 5.15.
Figura 2.3: a) Posizione dei principali parametri geometrici di controllo. b) Posizione
dei principali gaps utilizzati dal controllore.
I parametri geometrici di controllo in tabella 2.1 e mostrati in figura 5.15 sono:
1) Ip : corrente di plasma;
32
CAP. 2 IL SISTEMA DI CONTROLLO NEL JET
2) (Rp , Zp ): posizione radiale e verticale del centroide di corrente di plasma individuato dai momenti di Shafranov tramite il codice Beta-Li;
3) RIG: Radial Inner Gap tra prima parete interna del vessel e frontiera di plasma;
4) ROG: Radial Outer Gap tra prima parete esterna del vessel e frontiera di plasma;
5) T OG: Top Gap tra prima parete superiore e frontiera di plasma. Viene calcolato
come la distanza media tra i 3 segmenti superiori (definiti TOG2, TOG3 e TOG4);
6) (Rx , Zx ): posizione radiale e verticale dell’X-Point;
7) (RSI , RSO ): posizione radiale dello strike-point interno ed esterno;
8) (ZSI , ZSO ): posizione verticale dello strike-point interno ed esterno;
Figura 2.4: Schematizzazione del controllo operato al JET per la forma e la posizione
del plasma.
I requisiti principali per il controllo della forma del plasma e la sua stabilizzazione
sono limitati, dunque, alla conoscenza della frontiera di plasma. Le difficoltà e le
33
CAP. 2 IL SISTEMA DI CONTROLLO NEL JET
instabilità tipiche delle varie configurazioni rendono indispensabile l’utilizzo di un
sistema di controllo in retroazione (figura 2.4) che regoli le grandezze topologiche in
questione. Come in ogni sistema di controllo, un ruolo essenziale è rivestito dal sistema
di stima dei parametri geometrici controllati. Tali parametri legati alla frontiera non
sono direttamente misurabili e vanno quindi ricavati in tempo reale dalle informazioni
disponibili. A tale scopo, si fa uso di un algoritmo che per ogni istante dell’impulso
riesca a risolvere il seguente problema:
Problema 2.1. Detta Ω la regione di vessel contenente il plasma e m le misure
magnetiche di flusso assegnate, identificare la frontiera di plasma ∂Ω.
♣
La soluzione diretta di questo problema è estremamente onerosa e non possibile
in real-time: sarebbe necessario prendere in considerazione tutte le equazioni del
problema magneto-idrodinamico completo con le relative condizioni al contorno. Per
ovviare a questo, si fa uso di un veloce algoritmo basato sulla proprietà che la frontiera
del plasma coincide con una linea di livello della funzione flusso poloidale (sezione 3.1).
Questo consente di ricondurre il Problema 2.1 al problema inverso di determinare
un’approssimazione di tale funzione.
La soluzione del Problema 2.1 si compone essenzialmente di tre fasi distinte:
i) calcolo di un’espressione approssimata della funzione Ψ nella regione di vuoto,
Ωv , presente tra il plasma e la struttura della macchina: si determina una mappa
di flusso;
ii) calcolo del valore di flusso che individua la frontiera di plasma: si determina ψ ∗
in (2.1.1);
iii) calcolo dei parametri geometrici di interesse: si determinano gaps, X-Points e
strike-points.
34
CAP. 2 IL SISTEMA DI CONTROLLO NEL JET
La prima fase verrà ampiamente trattata nel capitolo 4.
Una volta che la prima fase è stata completata, si è potenzialmente in grado di valutare
la funzione Ψ in ogni punto della regione Ωv . Pertanto, si può affrontare il problema
di determinare il valore di flusso costante che individua la frontiera del plasma. Nel
caso in cui il plasma sia di forma circolare e tocchi la parete in un punto determinato,
questa fase è di immediata soluzione. Poiché il valore assoluto di flusso decresce in
maniera monotona dal centro del plasma verso la parete, il punto sulla prima parete
dove il flusso è massimo, individua il punto dove essa tocca il plasma. Sia X0 l’insieme
dei punti di nullo interni alla regione Ωv accessibile al plasma, il valore costante che il
flusso poloidale attinge sulla frontiera può essere cercato tra i valori che la funzione Ψ
assume sugli insiemi X0 e ∂Ω. In particolare, indicato con ψ ∗ tale valore, si dimostra
in [7] e [8] che risulta:
ψ∗ =
max Ψ(r) se Ip > 0
r∈∂Ω∪X0
min Ψ(r) se Ip < 0
(2.1.1)
r∈∂Ω∪X0
Per configurazioni di plasma più complesse (vedere sezione 1.3.2), esiste un punto di
nullo del campo magnetico e il valore di flusso sulla frontiera è calcolato come il valore
di flusso in quel punto.
Una volta che anche la seconda fase è stata completata, si è in grado di ricercare un
certo numero di punti appartenenti alla frontiera del plasma; da questi punti sarà
poi possibile calcolare i desiderati parametri geometrici. Per calcolare un gap, infatti,
questo segmento fittizio viene ridotto ad un insieme di punti. Poiché la funzione flusso
è monotona verso il plasma, la ricerca della frontiera può essere effettuata utilizzando
l’algoritmo di bisezione. Partendo dal centro del segmento e confrontando il flusso
in uno dei punti del segmento con quello al bordo, l’algoritmo può decidere su quale
parte del segmento continuare la ricerca. In maniera analoga avviene la ricerca del-
35
CAP. 2 IL SISTEMA DI CONTROLLO NEL JET
lo strike point. Esso è la posizione dove il plasma deposita gran parte della propria
energia quando si trova nella configurazione detta X-Point (vedere sezione 1.3.2 per i
dettagli). Lo strike point è individuato seguendo la superficie esterna del flusso dell
punto di X-Point fino al divertore.
Per l’importanza assunta nel controllo da gaps, x-point e strike points, questi parametri sono l’insieme di dati verificati nella fase di validazione del nuovo modello studiato
(vedere capitolo 5).
Figura 2.5: Schematizzazione dei passaggi necessari per ottenere, dalla misure in
ingresso, i parametri geometrici necessari al controllo di forma e posizione del plasma.
2.2
Principi di misura magnetica nelle macchine da
fusione
Data l’importanza delle misure magnetiche nel problema affrontato, in questo paragrafo verranno presentati brevemente i principali sistemi di misura del JET.
Il sistema di diagnostiche presenti è molto articolato ed è costituito da strumentazioni di ogni tipo, in grado di fornire informazione su ogni parametro di plasma. Il
tokamak dispone di diagnostiche magnetiche, diagnostiche di raggi-X, di densità, di
temperatura elettronica e ionica e di ulteriori sistemi di misura. Ciò nonostante, l’investigazione diretta della regione interna della colonna di plasma non è realizzabile da
nessuno di queste, sia a causa delle critiche condizioni di temperatura sia per l’effetto
perturbativo che una tale operazione può comportare. Sono possibili solo misure con
dispositivi collocati all’esterno del vessel che hanno, pertanto, limitazioni ed errori.
36
CAP. 2 IL SISTEMA DI CONTROLLO NEL JET
Il metodo più semplice per misurare il campo magnetico in prossimità di un punto
nello spazio, è utilizzare delle sonde costituite da piccole bobine. Il campo induzione magnetica che attraversa la sezione della bobina è misurato mediante la tensione
indotta dal campo stesso ai capi della bobina secondo la legge di Faraday. Un tipico
esempio di sistema di misura di questo tipo è illustrato in figura 2.6.
Figura 2.6: Tipica bobina di misura e circuito d’integrazione.
Il legame tensione/campo-induzione è espressa mediante la seguente relazione:
V
dφ
dt
dB
= NA
dt
= −
dove N è il numero di spire della bobina di area A. Come indicato nella figura 2.6,
poiché si è interessati in B piuttosto che alla sua derivata temporale Ḃ si utilizza un
circuito di integrazione per ottenere un segnale proporzionale al campo:
V0 =
N AB
RC
dove RC è la costante di tempo del circuito di misura. La limitazione maggiore di
queste bobine per la misura del campo magnetico è che esse rispondono al grado di
variazione del campo Ḃ, non del campo stesso. Per campi stazionari o lentamente
37
CAP. 2 IL SISTEMA DI CONTROLLO NEL JET
variabili, questa tipologia di bobina diventa inutile a meno che non possa essere fisicamente mossa all’interno del campo in maniera controllata (procedimento piuttosto
ingombrante e laborioso). Per i campi stazionari, si utilizza un differente fenomeno
fisico per misurare il campo magnetico: l’effetto Hall.
Per effetto Hall si intende il campo elettrico indotto in un semiconduttore percorso
da corrente e immerso in un campo magnetico. In figura 2.7 si individua il campo di
denstà di corrente imposto e il campo elettrico che si genera a causa della presenza
del campo induzione che agisce sulle cariche. La carica risultante che si concentra
sulle facce della sonda incrementa un campo elettrico addizionale che cancella la forza magnetica. Questo campo addizionale è misurato dagli elettrodi delle facce del
semiconduttore.
Figura 2.7: Schema di una sonda ad effetto Hall [9].
Un’ulteriore diagnostica di misura di campo è la Rogowski, una delle più note
configurazioni per le bobine di misura di corrente. Consiste in una bobina a solenoide
le cui estremità sono chiuse insieme per formare un anello, come illustrato in fig. 2.8.
Il flusso totale che attraversa la coil può essere scritto come un integrale piuttosto
che come somma delle singole spire:
Φ=n
H ∫
l
H
dAB
·
dl
A
B
·
dl
=
µI
l
=⇒ Φ = nAµI
(2.2.1)
38
CAP. 2 IL SISTEMA DI CONTROLLO NEL JET
Figura 2.8: Schema di sonde Rogowski, poloidali e diamagnetiche [10].
dove I è la corrente totale contenuta da l e µ è la permeabilità magnetica del
mezzo nel solenoide. Dal flusso si ottiene la relazione lineare tra tensione di uscita e
corrente tramite un ulteriore circuito integratore che ne effettua la misura:
V = Φ̇ = nAµI˙
La bobina Rogowski procura, così, una misura diretta della corrente totale che scorre
all’interno del suo centro. Per questo motivo, la bobina è appropriata per misurare la
corrente di plasmi se collegata al ring di un tokamak nella modalità di figura 2.9.
Figura 2.9: Utilizzo della bobina Rogowski per misurare la corrente di plasma [10].
39
CAP. 2 IL SISTEMA DI CONTROLLO NEL JET
2.2.1
Diagnostiche magnetiche nel JET
La macchina JET dispone di una quantità elevata di dispositivi di misura per grandezze di tipo elettromagnetico. Esistono sonde per misure locali e globali di tensione
e di corrente di campo poloidale e toroidale, avvolgimenti Rogowski dislocati in più
sezioni toroidali per la misura della corrente totale di plasma, sonde per misure di
campi in posizioni specifiche della macchina o sonde per misure della componente
radiale del campo magnetico.
In figura 2.10 è illustrata la disposizione delle sonde elettromagnetiche installate nel
JET per il sistema di controllo di forma. Nel seguito si supporrà di disporre di un
totale di m = 52 sensori magnetici funzionanti e suddivisi in:
• 15 Internal Discrete Coils
• 12 External Vessel Saddle Loops
• 5 Poloidal Limiter Coils
• 4 Full Flux Loops
• 16 Divertor (Target) Coils
Figura 2.10: Sonde elettromagnetiche installate al JET per il Plasma Shape Control.
Figura tratta da [2].
40
Capitolo 3
LA RICOSTRUZIONE
MAGNETICA
In questo capitolo si presenteranno i metodi utilizzati per ottenere
un’accurata stima della posizione e della forma di plasma.
Sia per migliorare le prestazioni del processo di fusione, sia per proteggere i componenti del macchinario, la ricostruzione del profilo di plasma è un problema critico e
delicato dal punto di vista diagnostico e controllistico. Per tale motivo, la stima della
forma assume un ruolo chiave nel soddisfare i requisiti delle applicazioni in real-time.
Sfortunatamente la forma del plasma non è una quantità direttamente misurabile;
essa, dunque può essere solo calcolata utilizzando i dati forniti dai sensori diagnostici,
come le misure magnetiche del flusso e del campo.
Per rispondere al quesito di come riconoscere, individuare e stimare il plasma all’interno della camera da vuoto, occorre innanzitutto fornire una definizione pratica di cosa
sia il profilo di plasma. La fisica del problema associa in primo luogo tale definizione
alla configurazione magnetica del plasma (vedere sezione 1.3.2):
Il boundary del plasma è la superficie chiusa di flusso più esterna interamente contenuta nel vessel da vuoto.
Mentre le particelle interne a tale limite seguono le linee del campo magnetico
41
CAP. 3 LA RICOSTRUZIONE MAGNETICA
che restano all’interno del plasma, le linee di campo esterne, non chiuse, intersecano
la parete della macchina e risultano pertanto non confinate. Il limite di plasma è o
la linea di flusso più esterna non intersecante alcun oggetto solido o è una superficie
contenente un punto nel quale il campo magnetico poloidale si annulla. Nella configurazione, invece, in cui il plasma tocca la prima parete, il punto di contatto determina
proprio il flusso del boundary.
3.1
Equazione di equilibrio Grad-Shafranov
Il comportamento di un plasma immerso in un campo magnetico è descritto dalle
equazioni MHD (MagnetoHydroDynamics). Queste equazioni, una volta vincolate
alla condizione di equilibrio del plasma, si riducono alla soluzione di un’equazione
differenziale, detta equazione di Grad-Shafranov.
Per equilibrio si intende quella situazione in cui le forze in gioco nella configurazione
hanno risultante nulla. Forze magnetiche, dovute ad interazione tra campo induzione
magnetica e campo di corrente, si equilibrano a forze cinetiche quali la pressione di
plasma.
Per magnetoidrodinamica, si intende la teoria nella quale il plasma è visto come un
mezzo fluido continuo reso sensibile all’azione del campo magnetico dalla presenza di
una distribuzione interna di corrente. Su scala macroscopica la magnetoidrodinamica
consente di descrivere con buona approssimazione l’evoluzione temporale di un plasma
in una macchina tokamak.
L’approssimazione più comune dell’MHD è di assumere che il fluido sia un conduttore
perfetto con una resistività η piccolissima o nulla. Questa semplificazione porta alla
42
CAP. 3 LA RICOSTRUZIONE MAGNETICA
MHD ideale e alla legge di Ohm generalizzata:
E + v × B = ηj
(3.1.1)
il campo elettrico diventa dipendente solo dalla velocità fluida v e dal campo magnetico, nel limite di resistività η = 0. In pratica, il campo elettrico può essere eliminato
dalle equazioni di Maxwell. Il set di equazioni della MHD ideale è quindi [11]:
∂ρ
+ ∇ · (ρv) = 0
∂t
dv
ρ
= j × B − ∇p
dt
∂b
−
= ∇×E
∂t
(3.1.2)
(3.1.3)
(3.1.4)
∇ × B = µ0 j
(3.1.5)
∇·B = 0
(3.1.6)
dove:
• j è la densità di corrente nel plasma;
• µ0 è la permeabilità magnetica del vuoto;
• B è il campo di induzione magnetica;
• p la pressione cinetica del plasma;
• il termine j × B è la forza di Lorentz agente sul volume elementare di plasma;
• l’equazione (3.1.4) è la legge di Faraday che lega la variazione temporale del
campo di induzione magnetica con il campo elettrico;
• l’equazione (3.1.6) è la legge di Gauss che esprime la solenoidalità del campo B.
43
CAP. 3 LA RICOSTRUZIONE MAGNETICA
L’equilibrio tra la forza di pressione interna al plasma e la forza magnetica di confinamento può essere studiato a partire dalle suddette equazioni della magnetoidrodinamica. La condizione base per l’equilibrio è che la sommatoria delle forze agenti su un
volume elementare di plasma sia nulla. In particolare, un plasma è in equilibrio se le
correnti e i campi magnetici bilanciano la pressione interna del fluido che tende a fare
espandere il fluido stesso. Questa condizione può essere ottenuta se si eliminano nelle
equazioni precedenti le derivate temporali. In questo modo l’equilibrio è ottenuto
risolvendo un sistema di equazioni ridotto:
∇p = j × B
(3.1.7)
∇ × B = µ0 j
(3.1.8)
∇·B = 0
(3.1.9)
Si sottolinea il fatto che queste ultime equazioni non contengono più la velocità fluida, ma solo le correnti, i campi magnetici, e la pressione del plasma. In particolare,
l’equazione (3.1.8) dice che le superfici isobare (cioè, di pressione costante) sono superfici a flusso magnetico costante (superfici di flusso). Sempre nel caso di resistività
nulla, è anche possibile dimostrare che tali superfici devono avere geometria toroidale
ed essere innestate l’una nell’altra, come schematizzato in figura 3.1.
Figura 3.1: Superfici magnetiche toroidali annidate [12].
44
CAP. 3 LA RICOSTRUZIONE MAGNETICA
Da questa premessa è possibile ricavare l’equazione di Grad-Shafranov definita per
plasmi assialsimmetrici. Si tratta dunque di un problema ridotto alla bidimensionalità sul piano poloidale; infatti, tutte le grandezze in gioco risulteranno indipendenti
dall’angolo toroidale φ. In tali ipotesi è possibile esprimere la (3.1.6) come:
1 ∂ (rBr ) ∂Bz
+
=0
r ∂r
∂z
(3.1.10)
È conveniente ora definire la funzione flusso poloidale:
∫
r
Ψ(r, z) ,
τ Bz dτ
∫
1
=
Bz dS
2π S
∫
1
=
B · dS
2π S
0
(3.1.11)
Figura 3.2: Il flusso è determinato come l’integrale del campo magnetico B su una
superficie circolare S centrata nell’asse della macchina (r è il raggio di S e z è l’altezza
del suo centro).
A meno di 2π la quantità Ψ equivale al flusso del campo magnetico B che attraversa
la superficie S (flusso poloidale). Dalla (3.1.10) e (3.1.11) possiamo esprimere le
componenti radiale e verticale del campo magnetico come le derivate parziali della
funzione di flusso:
Br = −
1 ∂Ψ
r ∂z
Bz =
1 ∂Ψ
r ∂r
(3.1.12)
45
CAP. 3 LA RICOSTRUZIONE MAGNETICA
Nel caso delle configurazione tokamak, il campo toroidale è una quantità nota e
pertanto può essere riscritta come:
BT =
f
ET
r
(3.1.13)
Le relazioni individuate per le componenti di campo induzione magnetica possono
essere riassunte nel seguente sistema:
B = BT + BP
1
BP =
[∇Ψ × ET ]
(3.1.14)
r
f
BT =
ET
r
La funzione f assume il valore 1 laddove non vi sia plasma (il campo toroidale ha una
dipendenza del tipo 1/r), mentre nella zona di plasma rappresenta il contributo del
plasma stesso al campo toroidale . Sapendo che la densità di corrente j e il campo B
descrivono delle superfici a pressione costante, possiamo combinare le equazioni della
magnetoidrodinamica, del flusso poloidale e delle componenti di campo B per ricavare
il parallelismo tra i gradienti di p, Ψ ed f :
∇p // ∇Ψ // ∇f
(3.1.15)
⇒ p = p(Ψ) e f = f (Ψ)
(3.1.16)
La combinazione opportuna delle precedenti relazioni si riduce all’equazione di equilibrio di Grad-Shafranov (i dettagli in [11]):
∆∗ Ψ = r
∗
1 ∂f 2
∂p
+
∂Ψ 2µ0 r ∂Ψ
∗
dove ∆ è un operatore differenziale definito come: ∆ Ψ ,
(3.1.17)
∂
− ∂r
[
1 ∂·
µr ∂r
]
−
∂
∂z
[
1 ∂·
µr ∂z
]
.
L’eqauzione di Grad-Shafranov relaziona la pressione interna del plasma con il campo
magnetico esterno ed, analiticamente, equivale alla componente toroidale di densità
di corrente di plasma (∆∗ Ψ = jφ ). Una volta risolta, essa fornisce la funzione di flusso
poloidale Ψ dalla quale è poi possibile risalire ai profili di corrente.
46
CAP. 3 LA RICOSTRUZIONE MAGNETICA
3.2
Metodi di ricostruzione
La funzione di flusso Ψ contiene tutta l’informazione necessaria per localizzare il
plasma all’interno della camera da vuoto e determinarne la posizione rispetto ai componenti della prima parete. Contemporaneamente, una completa conoscenza della
configurazione del campo esterno permette la ricostruzione della posizione di plasma
ma non la ricostruzione della struttura magnetica interna.
Esistono numerosi codici di equilibrio elettromagnetico che risolvono il problema del
boundary. Codici di equilibrio non lineari ricostruiscono la forma e simulano la dinamica del plasma per le varie scariche di corrente grazie a tecniche computazionalmente
onerose e non compatibili con il periodo di campionamento richiesto per il controllo
(dell’ordine di alcuni ms).
A tal proposito, bisogna distinguere tra:
− equilibrium evolution codes (MAXFEA e PROTEUS);
− equilibrium reconstruction codes (EFIT);
− boundary reconstruction code (XLOC, metodo filamentare).
Il primo metodo risolve l’equilibrio basandosi sulle dinamiche delle correnti di coils
esterne e sulla corrente di plasma; mentre il secondo risolve il problema dell’equilibrio
prendendo in considerazione le misure interne e la distribuzione attuale di corrente
di plasma. Entrambi forniscono una descrizione magnetica completa del plasma: distribuzione di densità di corrente e distribuzione di flusso. La differenza principale
tra i due codici riguarda i dati in ingresso. Il primo utilizza le misure sperimentali e
l’accuratezza risultante è sia limitata dal fatto che il problema si presenta mal-posto
sia dai rumori sulle misure. I segnali ricostruiti da EFIT, invece, sono forniti dal
47
CAP. 3 LA RICOSTRUZIONE MAGNETICA
codice stesso sotto forma di correnti confrontate con i dati diagnostici in base alla minimizzazione di un funzionale di errore quadratico [13]. Inoltre, EFIT (Equilibrium
FITting) risolve l’equazione (3.1.17) non solo nella zona di plasma (inclusa la sua regione interna) ma per una intera sezione poloidale della macchina, utilizzando, come
vincoli al modello, anche misure magnetiche interne al vessel. Questo codice è stato
utilizzato come riferimento nella fase di validazione dei risultati ottenuti in questo
lavoro (capitolo 5).
XLOC è, invece, un codice nato per la ricostruzione in-linea del buondary. Esso interpola il flusso magnetico mediante espansioni di un determinato grado. L’equazione
di Grad-Shafranov è applicata come vincolo ai polinomi e il best fit viene effettuato
sulle sole misure magnetiche dei sensori (i dettagli sono nella sezione 4.1 e in [14]).
In questo modo, XLOC evita completamente la modellizzazione del plasma. L’informazione di flusso ottenuta viene poi utilizzata per ricostruire la forma di plasma in
termini di distanze geometriche tra boundary e prima parete.
Il metodo filamentare, invece, rappresenta il plasma come un insieme di filamenti
percorsi da una certa quantità di corrente. Il valore di campo magnetico, prodotto
da ogni filamento, risulta proporzionale alla corrente che lo percorre e inversamente
proporzionale al quadrato della distanza, secondo la legge di Ampere-Laplace [15].
Se i filamenti vengono posizionati lontani dai sensori più della distanza tra ciascuno di loro, se ne potrà misurare la sovrapposizione degli effetti e identificarla come
∑N
un’unica sorgente di corrente: IF IL. =
i=1 Ii δ(r − ri ). Il numero N di filamenti
scelti e la loro collocazione ri sono state variabili progettuali determinate in maniera
semi-empirica analizzando tutte le forme di plasma nelle configurazioni standard dello
spazio operativo del JET.
48
Capitolo 4
METODI E MODELLI
In questo capitolo vengono descritti due modelli matematici di ricostruzione della topologia magnetica di plasma. Si parlerà del codice
polinomiale XLOC, limitato a localizzare la frontiera senza interessarsi dell’analisi dettagliata delle caratteristiche interne del plasma
(sezione 4.1) e di un codice in grado di approssimare la distribuzione di flusso del plasma con un numero opportuno di filamenti di
corrente posti all’interno del vessel (sezione 4.2).
4.1
Modello Polinomiale
XLOC, (acronimo di X-point LOCalization algorithm), soddisfa le specifiche di determinare la frontiera di plasma in meno di 2 ms. La sua implementazione è stata
utilizzata quotidianamente da più di 10 anni come componente del Plasma Position
and Current Controller. Esso offre la possibilità di definire la forma del plasma usando direttamente le distanze plasma-parete come segnali di feedback al posto di offrire
una configurazione di plasma corrispondente alle correnti delle PF coils come input
al sistema di controllo.
In un tokamak il campo magnetico poloidale può essere rappresentato usando la funzione di flusso poloidale Ψ già vista in (3.1.11). Per la sua approssimazione, XLOC
usa 5 serie di Taylor troncate al 6◦ ordine e centrate in 5 punti differenti della camera
49
CAP. 4 METODI E MODELLI
da vuoto. Per ogni regione l’espressione del flusso è data da:
Ψ(ρ, z) =
∑
ai,j ρi z j
(4.1.1)
0≤i+j≤6
dove:
• ρ = (r2 − r02 )
• (r0 , z0 ): coordinate del centro della serie e dell’asse del tokamak.
Figura 4.1: Lo spazio della camera da vuoto è suddiviso nelle 5 regioni a cui XLOC
attribuisce una differente base di funzioni polinomiali. Le regioni sono così definite:
Upper X-Point, Lower X-Point, Inner Wall, Upper Belt Limiter, Lower Belt Limiter.
La camera da vuoto è stata suddivisa in 5 regioni (figura 4.1) e per ogni regione
l’insieme dei coefficienti ai,j dell’equazione (4.1.1) è determinato eseguendo il fitting
delle espansioni di flusso di Taylor rispetto alle misure magnetiche disponibili al JET
con l’equazione da vuoto ∆∗ Ψ = 0. Come descritto in dettaglio nella sezione 2.2.1,
50
CAP. 4 METODI E MODELLI
il numero totale delle misure utilizzate sono 56. Dalla relazione seguente si ricava il
numero di coefficienti ai,j per ogni regione da stimare:
N=
(ordine + 1) · (ordine + 2)
= 28
2
dove ordine indica il grado della serie di Taylor troncata. Occorrono, dunque, un totale
di (28 · 5) = 140 coefficienti e rispetto alle 56 misure disponibili è chiaro che il sistema
non ha soluzione unica. Vengono introdotti ulteriori vincoli che riducono il numero
dei coefficienti e sfruttano la conoscenza a priori che si ha riguardo il comportamento
della funzione di flusso. Si possono utilizzare, nella pratica, due approcci:
(a) considerare le equazioni di equilibrio del plasma per cercare le relazioni tra i
coefficienti di una singola espansione di flusso;
(b) imporre vincoli al contorno sulle funzioni flusso di due regioni adiacenti, in modo
tale che i valori generati siano forzati ad essere gli stessi sui punti di contatto.
L’obiettivo è ovviamente quello di aumentare l’accuratezza dell’approssimazione senza aumentare la complessità dell’algoritmo così tanto da non essere più utilizzabile in
real-time.
La soluzione dell’equazione di Grad-Shafranov è di solito computazionalmente impegnativa, ma se il modello viene ridotto in funzione della regione di vuoto intorno
al plasma, essa è significativamente ridotta. All’esterno del plasma, infatti, le due
funzioni p e f sono uguali a zero e la (3.1.17) si riduce all’equazione di Poisson per
coordinate cilindriche:
∇2 Ψ = 0
)
1 ∂Ψ
∂ 2Ψ
=0
+
r ∂r
∂z 2
∂ 2Ψ ∂ 2Ψ
⇒ 4(ρ + r02 ) 2 +
=0
∂ρ
∂z 2
∂Ψ
⇒ r
∂r
(
(4.1.2)
51
CAP. 4 METODI E MODELLI
Applicare tale equazione all’equazione (4.1.1) porta ad un insieme di 20 relazioni
lineari tra i coefficienti ai,j , riducendo le variabili indipendenti da 140 a 100 (20 · 5).
Nridotto =
ordine · (ordine + 1)
− 1 = 20
2
in questo modo si ottiene un sistema di 20 equazioni in 28 incognite, il che comporta
un Kernel Space di dimensione pari a (28 − 20) = 8. Ogni espressione di flusso può
quindi essere scritta come:
Ψ(ρ, z, t) =
20
∑
ci (t)Gi (ρ, z)
(4.1.3)
i=1
dove:
• la variabile tempo t è stata esplicitata per distinguere meglio le componenti
costanti e precalcolabili da quelle tempo-varianti che necessitano il calcolo per
ogni iterazione dell’algoritmo;
• ci (t) sono le variabili incognite;
• i parametri Gi (ρ, z) sono combinazioni, dipendenti dalla sola variabile di spazio,
delle potenze delle coordinate dove viene determinato il flusso.
A questo punto, intervengono le misure magnetiche a disposizione: esse vengono
espresse come combinazione lineare dei coefficienti ci (t) e dei termini costanti nel
tempo Gi (ρ, z) relazionati alla geometria del problema:
m(t) =
20
∑
ci (t)Gi (ρ, z) = gT c(t)
(4.1.4)
i=1
Questo sistema può essere risolto solo se il numero di equazioni è maggiore o uguale
al numero dei coefficienti ci (t). Se il numero delle misure utilizzate è più alto del
52
CAP. 4 METODI E MODELLI
numero delle incognite, si può utilizzare il metodo dei minimi quadrati per la minimizzazione della differenza tra flusso calcolato e flusso misurato. In forma matriciale
ciò è esprimibile come:
{
}
arg min kG(ρ, z)c − m(t)k2
c∈RNridotto
( 20
)2
m
1 ∑
∑
gi,j cj − mi (t)
= min
2
j=1
i=1
c(t) =
(4.1.5)
(4.1.6)
Si arriva alla soluzione del sistema con l’utilizzo della matrice pseudo-inversa G+ :
cT =
((
)−1 T )
GT G
G ·m
= G+ · m
(4.1.7)
(4.1.8)
dove la G+ può essere pre-calcolata ∀(ρ, z).
La suddivisione del piano poloidale in regioni (figura 4.1) comporta qualche discrepanza nella fase di matching delle espansioni polinomiali adiacenti. Per limitare tale
effetto, XLOC necessita di vincoli di continuità in grado di fornire una morbida transizione tra le regioni stesse. Minimizzare queste discontinuità ai bordi, tra le espansioni
locali, comporta l’introduzione di un ulteriore insieme di vincoli. Infatti, alle espansioni polinomiali di due regioni adiacenti viene imposto di avere lo stesso valore in uno o
più punti, riducendo ulteriormente il numero di gradi di libertà del problema. Questi
punti sono chiamati hard tie points; ve ne sono altri con uno scopo simile ai precedenti
che vengono chiamati soft tie points per una migliore minimizzazione del salto tra le
cinque regioni (guardare figura 4.1 per la posizione di questi punti). Il vantaggio nel
loro utilizzo consiste anche in un significativo miglioramento dell’efficienza computazionale. La modalità con la quale vengono considerati matematicamente tali vincoli è
presentata in dettaglio nell’appendice di XLOC. Altra difficoltà nasce dall’estrapolazione del flusso nelle regioni 0 e 3, dove è possibile la presenza di un campo magnetico
53
CAP. 4 METODI E MODELLI
nullo. In questa situazione, infatti, la linea di flusso si chiude su se stessa con un
angolo di 90◦ , aumentandone la difficoltà di stima. In aggiunta, poichè l’X-Point è un
punto di inflessione della funzione flusso, il suo gradiente è prossimo allo zero e piccoli
errori sulla sua stima potrebbero comportare grandi errori nella determinazione delle
coordinate dell’X-Point, rovinando così molte identificazioni della frontiera. Un altro
limite di XLOC consiste nell’incapacità di rappresentare le superfici di flusso all’interno del volume contenente il plasma, perchè l’effetto di discrepanza polinomiale è
maggiormente evidente nelle zone più lontane dai sensori: l’interpolazione utilizzata
crea un valore fittizio lungo le connessioni delle varie regioni (fenomeno visibile in
figura 5.7 nel capitolo relativo ai risultati ottenuti).
Dal punto di vista del codice implementato, XLOC è diviso in due parti:
I) la sezione off-line: esegue tutti i calcoli che dipendono solo dalla configurazione
geometrica della macchina (posizione delle sonde magnetiche, del vessel, ecc..);
II) la parte on-line: fa uso delle misure magnetiche per la ricerca del boundary e
dell’X-Point.
Nel dettaglio, XLOC Off-line calcola:
a) la matrice inversa per la risoluzione dei minimi quadrati;
b) la matrice contenente i coefficienti gi per tutti i punti del vessel;
c) i coefficienti gi per tutti i punti dove si vuole calcolare il flusso tramite la determinazione dei gaps tra vessel e boundary.
XLOC On-line utilizza tutti i risultati della parte off-line e le misure magnetiche come
input. Segue questa procedura:
54
CAP. 4 METODI E MODELLI
• calcola i coefficienti del vettore c moltiplicando la matrice di pseudo-inversa per
l’array delle misure (vedere (4.1.7));
• calcola il flusso sul vessel e trova il suo valore minimo;
• cerca la posizione dell’X-Point dalla soluzione di
metodo di Newton-Raphson;
∂Ψ
∂r
= 0 e
∂Ψ
∂z
= 0 tramite il
1
• calcola i gaps geometrici tra vessel e boundary come descritto nella sezione 2.1.
1
Metodo che ad ogni iterazione approssima linearmente la funzione per ottenere una migliore
stima del punto di zero. Questi sono i passaggi [16]:
1) calcola la derivata in un punto dell’intervallo di ricerca dove si presume che l’X-Point si trovi,
il che permette di ottenere la retta tangente alla funzione in quel punto;
2) calcola il punto in cui la tangente passa per lo zero: se tale punto esce dall’intervallo di ricerca
l’algoritmo non continua;
3) calcola di nuovo la derivata in quel punto e ripete dal punto 2 fino a convergenza avvenuta o
al più per 3 iterazioni. Ciò evita che l’algoritmo continui la ricerca in una regione in cui non è
presente l’X-Point o che trovi un punto troppo distante.
55
CAP. 4 METODI E MODELLI
4.2
Modello Filamentare
Il modello filamentare è, come XLOC, un codice vacuum field per il real-time ma con
l’implementazione di una diversa modellizzazione del flusso magnetico. È uno dei metodi utilizzati tipicamente nell’identificazione del plasma boundary per un tokamak.
Esso consiste essenzialmente nel rappresentare con un insieme finito di filamenti la
corrente di plasma. Il metodo è stato per la prima volta proposto nel 1979 (TOSCA
Tokamak [17]) e successivamente utilizzato in molti lavori (ISX-B [18], Doublet III
[19]).
Alla luce dei limiti evidenziati per XLOC nella sezione 4.1, l’idea guida dell’approccio
filamentare è quella di migliorare la ricostruzione del flusso con l’utilizzo di informazioni più dettagliate sullo stato del sistema, ovvero il plasma, le strutture attive e
i circuiti poloidali. Tutti questi elementi, infatti, contribuiscono alla configurazione
magnetica finale con un proprio effetto di flusso. Una volta che sono stati calcolati
analiticamente tali contributi, vengono utilizzati i sensori magnetici per procedere alla
migliore regolarizzazione e ottenere la mappa completa nel vessel.
Assumendo che la configurazione geometrica del boundary possa essere ottenuta
dalle misure magnetiche ricavate al di fuori del plasma e sebbene il plasma reale
possa presentare distribuzioni di corrente interna differenti, questo modello alternativo
fornisce un campo magnetico all’esterno del boundary praticamente indistinguibile da
quello originale. Una precisa modellizzazione dei sensori, infatti, permette di conoscere
in maniera corretta le sorgenti esterne di campo magnetico.
La ricostruzione viene decisamente facilitata e migliorata se la porzione di misure
magnetiche, dovute alle correnti di plasma, potesse essere ottenuta direttamente dalla
sottrazione della componente dovuta al campo poloidale delle bobine. Tale approccio,
56
CAP. 4 METODI E MODELLI
però, non è del tutto applicabile al JET a causa dell’importante effetto della struttura
attiva: occorre un modello in grado di rappresentare anche tale contributo esterno per
non introdurre un errore di stima.
Il problema in questione, dunque, è quello di riuscire a separare il contributo del
campo magnetico dovuto al plasma da quello prodotto da qualsiasi altra sorgente. Il
modello deve tener conto anche di eventuali sorgenti interne di corrente differenti dal
plasma, quali le bobine di divertore, e del fatto che l’analisi è eseguita a partire da
un numero finito di misure magnetiche di campo esterno. Questo input è dato da un
numero limitato di sensori posizionati lungo una linea chiusa nella sezione poloidale
dell’anello che circonda il plasma (le loro posizioni sono evidenziate nella figura 4.5).
Riassumendo:
(a) la geometria delle componenti della macchina e le correnti che scorrono nei circuiti
poloidali costituiscono un input del sistema;
(b) le strutture attive sono introdotte mediante un modello semplificato che ne stima
gli effetti con l’ipotesi che la colonna centrale del tokamak sia completamente
saturata mentre le limbs non lo siano (vedere fig. 1.10). Il ferro, infatti, ha un
comportamento altamente non lineare e, a causa del passaggio di corrente anche
lungo le varie strutture passive della macchina, si generano correnti indotte che
a loro volta implicano valori di flusso non trascurabili. Tali correnti possono
influenzare notevolmente le misure durante le fasi transitorie, e causare, se non
tenute in considerazione, una non corretta soluzione del Problema 2.1;
(c) il plasma è modellizzato con un opportuno numero di filamenti posizionati internamente al vessel in un’area che tipicamente è interessata dal plasma. La quantità
di corrente che scorre in ciascun filamento è determinata dal già menzionato me-
57
CAP. 4 METODI E MODELLI
todo dei momenti di corrente e verrá discusso in dettaglio nella sezione 4.2.2. La
posizione dei filamenti all’interno del vessel è considerata una variabile fissa del
modello.
Il Paragrafo 4.2.1 fornisce una formulazione rigorosa del Problema 2.1. Da tale formulazione si evidenzia che il problema in esame è un problema mal posto, e la sua
soluzione deve passare per una procedura di regolarizzazione.
Nel Paragrafo 4.2.2 si illustra la procedura di regolarizzazione scelta per il modello
filamentare in esame.
Nel Paragrafo 4.2.3 è descritto nel dettaglio lo schema a blocchi che implementa il
modello completo.
4.2.1
Formulazione Matematica del problema
In base al teorema di equivalenza del campo elettromagnetico ([20]) non è possibile
ricavare la distribuzione di corrente interna ad una data regione utilizzando soltanto
misure magnetiche esterne. Ai fini della soluzione del Problema 2.1, non è tanto
importante stimare la distribuzione di corrente nella regione delle bobine magnetiche,
piuttosto il loro effetto nella regione di vuoto (Ωv ) presente tra il plasma e la struttura
della macchina. Sempre per il teorema di equivalenza è allora sufficiente stimare
questo effetto su una curva chiusa che circonda un’area Ωv .
Se con m = [m1 m2 ... mm ] si indica il vettore delle misure e si considerano
le assunzioni relative all’equilibrio magnetoidrodinamico di sezione 3.1, il problema
dell’identificazione della frontiera del plasma ha allora la seguente formulazione:
Problema 4.1. Determinare la funzione Ψ che risolve l’equazione ellittica omogenea
di equilibrio
∆∗ Ψ = 0
58
CAP. 4 METODI E MODELLI
e che soddisfa le condizioni
Ψ(pk ) = mk
k = 1, .., m
dove pk indica la posizione della k-esima bobina.
♣
Il sistema di equazioni così posto ammette infinite soluzioni. La scelta di una di
esse richiede la specifica di condizioni al contorno. In altri termini il problema posto
si presenta come un tipico problema inverso mal posto, e la selezione di una soluzione
richiede un’opportuna procedura di regolarizzazione.
Dato il vettore di misure m, si considera valida la proprietà di sovrapposizione degli
effetti nei punti di misura: il flusso poloidale è scomponibile come la somma dei
contributi di corrente di plasma, di ferro e delle bobine.
∑
Ψ
=
1
∑ (ΨP LASM A + ΨF ERRO + ΨCOILS )
Ψ2 =
(ΨP LASM A + ΨF ERRO + ΨCOILS )
···
∑
Ψm =
(ΨP LASM A + ΨF ERRO + ΨCOILS )
(4.2.1)
Figura 4.2: Schematizzazione dei passaggi necessari per ottenere una mappa del flusso
poloidale dalle misure in ingresso.
Come schematizzato in figura 4.2, il passaggio dalla distribuzione di corrente alla
conoscenza del flusso poloidale è ottenuto tramite il metodo delle funzioni di Green
[21]. Esse esprimono la dipendenza del flusso poloidale dalla corrente toroidale nel
caso di un problema ellittico. Più in generale, per ottenere il campo prodotto da
una sorgente distribuita (una carica, un generatore di calore o qualsiasi altra sorgente
59
CAP. 4 METODI E MODELLI
di campo), si calcolano gli effetti di ciascuna porzione elementare della sorgente e si
sommano tutti insieme. Se G(r, r0 ) è il campo al punto r dell’osservatore prodotto
da una sorgente puntiforme di corrente posizionata in r0 , allora il campo in r prodotto da una distribuzione di corrente ρ(r0 ) è l’integrale di Gρ su tutto l’intervallo
di r0 occupato dalla sorgente. La funzione G è chiamata funzione di Green (vedere
(4.2.2)). Si può risolvere l’equazione disomogenea, per un campo prodotto da una
distribuzione di sorgente, tramite il prodotto della densità di sorgente con una funzione di Green integrata su tutto lo spazio. Equivalentemente, tale integrazione può
risolvere un’equazione omogenea aventi valori specifici su una data superficie. Ciò
significa che le condizioni al contorno su una superficie possono essere pensate come
equivalenti ad una distribuzione di sorgente sulla superficie stessa. Il dualismo tra
sorgenti e condizioni al contorno è riassunto nel seguente modo:
1. l’equazione per un campo in presenza di sorgenti è un’equazione differenziale
alle derivate parziali (PDE) disomogenea, ossia il termine che non contiene Ψ,
contiene la densità della sorgente (esempio è l’eq. di Poisson: ∇2 Ψ = −4πρ);
2. l’equazione per un campo che non presenta sorgenti è una PDE omogenea
(esempio è l’equazione di Laplace: ∇2 Ψ = 0)
Si può concludere che la soluzione di un’equazione disomogenea, con condizioni al contorno omogenee, aiuta a risolvere un’equazione omogenea con condizioni al contorno
disomogenee. La funzione di Green è perciò una soluzione di un problema omogeneo
ovunque, eccetto in un punto. Quando il punto è sul boundary, tale funzione può
essere utilizzata per soddisfare condizioni al contorno disomogenee (caso relativo al
Problema 4.1); quando si trova nello spazio può essere utilizzata per soddisfare l’equazione disomogenea corrispondente. In questa trattazione la funzione G0 utilizzata
60
CAP. 4 METODI E MODELLI
rappresenta il flusso poloidale (eccetto nel punto p di coordinate (r,z)) prodotto da
una distribuzione filamentare di corrente posizionata lungo la sezione toroidale nel
punto p0 = (r0 , z0 ). Essa risolve l’equazione omogenea del nostro problema in tutto
il piano poloidale; è soggetta ai vincoli di G0 (p, p0 ) → 0 quando |p| → ∞ e quando
r → 0. Ha la seguente espressione analitica:
(
)
µ0 √
k2
2
2
G0 (p, p0 ) =
rr0 E(k ) − (1 − )K(k )
πk
2
(4.2.2)
dove:
1. k 2 =
4rr0
(r + r0 + (z − z0 )2
)2
2. E(k) e K(k) sono gli integrali ellittici completi del primo e del secondo tipo [22].
In virtù del Problema 4.1, della decomposizione operata in (4.2.1) e del fatto che il
ferro aggiunge un importante contributo di campo/flusso alla distribuzione di corrente
sia del plasma che delle coils, si può scrivere:
MΨ (p) = Ψplasma (p, ferro, IPF ) + Ψiron (p, plasma, IPF ) +
n
∑
G0 (p, pPFn ) · IPFn
i=1
(4.2.3)
dove MΨ (p) è la misura di flusso nella posizione poloidale p = (r, z) e IPFn è la n-esima
corrente filamentare utilizzata per approssimare l’effetto del campo delle bobine.
Per il fatto che vale la seguente relazione:
∑
] sorgenti
Ψ(p, t) =
G0 (p, pi ) · Ii (t)
(4.2.4)
i=1
espressa nel significato fisico delle funzioni di Green, l’equazione (4.2.3) può essere
riscritta nella seguente forma matriciale generalizzata:
m=A·x
(4.2.5)
con
61
CAP. 4 METODI E MODELLI
1. m ∈ RM isure×1 , con Misure pari al numero delle misure magnetiche più il numero
delle correnti nei PF;
2. x ∈ RNf ilamenti ×1 esprime il vettore incognito dei profili di corrente che attraversano ciascun filamento di plasma, ferro e coils;
3. A ∈ RM isure×Nf ilamenti .
Facendo riferimento allo schema 4.2 è ora chiaro il fatto che il blocco relativo al modello deve risolvere necessariamente anche un problema di inversione di
matrice. Infatti, essendo incognite le componenti del vettore x, occorre procedere
all’operazione:
x = A−1 · m
(4.2.6)
Un problema inverso si presenta ogni qual volta si ha l’interesse a determinare la
struttura interna di un sistema fisico dalle misure del comportamento del sistema stesso; ovvero quando si vuole ricostruire un segnale in ingresso sconosciuto (input-x) che
produce in uscita un segnale (output-m) che può essere misurato, nota la struttura
del sistema. Ciò è l’opposto dei problemi diretti, dove l’interesse è il comportamento
del sistema (output) dato l’ingresso (input) o la struttura interna. A causa di errori
di misura intrinseci, però, il valore misurato di m è necessariamente differente da
A · x. La principale difficoltà nella risoluzione di un problema mal-posto è dovuta
proprio a questi errori. Infatti, a causa dell’enorme numero di condizionamento
2
della matrice essi tendono ad essere amplificati dal kernel al momento dell’inversione.
L’effetto disastroso risultante è una soluzione instabile e quindi inaccettabile: è perciò
2
Il grado di condizionamento di una matrice è una misura quantitativa di come la soluzione di un
problema venga influenzata da una perturbazione nei dati o, equivalentemente, di quanto un errore
sui dati possa essere propagato nei risultati. In altre parole, il rumore dei dati viene amplificato al
più di un fattore cond(A).
62
CAP. 4 METODI E MODELLI
necessario includere qualche tipo di regolarizzazione, indispensabile per stabilizzare
la soluzione del problema. Come accade spesso per i problemi inversi, il problema
dell’identificazione della frontiera di plasma si presenta come un tipico problema mal
posto. Risolvere un’equazione differenziale ellittica, infatti, può comportare diverse
situazioni a seconda della natura delle condizioni al contorno che vengono assegnate.
Una causa di mal condizionamento, ad esempio, è data dal fatto che i sensori utilizzati
non sono disposti con continuità lungo la curva chiusa Γm , ma occupano un numero
finito di punti; le condizioni al contorno sono quindi disponibili solo su un insieme
discreto.
Molti sono i metodi di regolarizzazione presenti in letteratura per risolvere il Problema
4.1 e, in generale, si distinguono a seconda se sono diretti, ossia basati sulle decomposizioni di matrici (QR, T-SVD,...), iterativi (metodi del gradiente) o se richiedono
la risoluzione di un problema di ottimizzazione (non-)lineare (algoritmo di Tikhonov,
ecc..).
In questo lavoro, è stata utilizzata in maniera combinata la tecnica TSVD, il metodo
di Lagrange e il metodo dei momenti di corrente.
SVD. La Singular Value Decomposition permette di identificare i valori singolari
σi di una matrice e di determinarne il grado di condizionamento mediante il rapporto
tra il più grande e il più piccolo dei valori singolari. Infatti si può dimostrare dalla
definizione di norma Euclidea indotta di una matrice che, detti λi gli autovalori di
una matrice invertibile AT A, si ha:
σi (A) =
√
λi (AT A)
cond(A) =
σM AX
σmin
Generalmente, i problemi a rango non pieno sono caratterizzati da una matrice A
avente un sottoinsieme di piccoli valori singolari e un ben determinato gap tra i valori
63
CAP. 4 METODI E MODELLI
singolari più grandi e quelli più piccoli. Questo implica che uno o più righe e colonne
di A sono “quasi” una combinazione lineare di altre o di tutte le rimanenti righe e
colonne. Perciò, la matrice A contiene informazioni ridondanti e la chiave per trattare
numericamente questi problemi è estrarre le informazioni linearmente indipendenti o il
rango numerico in A e riformulare il problema con una matrice ben-condizionata. Dal
punto di vista analitico [23], l’idea base è scomporre la matrice A ∈ Rmxn quadrata o
rettangolare con m > n in:
A = U ΣV T
n
∑
=
ui σi viT
i=1
dove U = [u1 u2 ... un ] ∈ Rmxn , V = [v1 v2 ... vn ] ∈ Rnxn sono matrici ortonormali
tali che U T U = V T V = In , Σ = diag(σ1 , ..., σn ), dove gli elementi σi decrescono
secondo l’ordine σ1 > σ2 > ... > σn > 0. I numeri non negativi σi sono chiamati
valori singolari di A, mentre i vettori ui e vi sono i vettori singolari sinistri e destri
di A, rispettivamente. La SVD è definita per qualunque valore di m e n (se m < n,
semplicemente la SVD si applica alla matrice AT e si scambiano tra loro U e V ).
Dal punto di vista geometrico, la SVD di A fornisce due basi di vettori ortogonali.
Le colonne di U e V, sono tali che la matrice diventa diagonale quando trasformata
rispetto a queste basi. Per la formulazione secondo la quale le incognite x̂ del modello
sono scelte tali che A · x̂ abbia distanza minima possibile dal vettore m, si ha:
x̂ = arg minkm − Axk2
x
Se A ha rango colonna pieno, utilizzando la SVD, si può ottenere la soluzione del
problema in forma di pseudo-inversa di Moore-Penrose [24]:
64
CAP. 4 METODI E MODELLI
x̂ = (AT A)−1 AT · m
1
σ1
−1
= V Σ U · m,
=
T
n
∑
(uT m)
i
i=1
σi
Σ
−1
0
=
0
0
0
1
σ2
0
0
0
0
..
.
0
0
0
0
1
σn
vi
Poiché il termine noto è affetto da rumore, si dimostra che i valori singolari più
piccoli, considerati nell’equazione di x̂, forniscono un contributo alla sua ricostruzione
minore del contributo in fatto di rumore che apportano, ragion per cui è opportuno
scartarli. In altre parole, la soluzione proposta è, in genere, numericamente instabile
e per limitarne l’instabilità si decide di mettere a zero il contributo di questi valori
singolari più piccoli, in un certo senso limitare i gradi di libertà della soluzione. Questa
considerazione è alla base della tecnica TSVD (svd Troncata). In pratica, si prende
la matrice Σ e si scompone in due parti, ossia si divide lo spazio della soluzioni in un
sottospazio corrispondente al segnale ed uno corrispondente al rumore:
[
]
Σ1 0
Σ=
0 Σ2
Ora viene scelto un valore di soglia che permette di considerare solo alcuni dei valori
singolari più grandi e trovare le corrispondenti soluzioni approssimate ma stabili:
[ −1 ]
Σ1 0
−1
−1 T
Σtr =
x̂tr = V Σtr U · m,
0 0
=
K
∑
(uT m)
i
i=1
σi
vi
Per la scelta del punto di troncamento si fa generalmente riferimento all’accuratezza con la quale le misure sono state prese e allo studio dell’andamento della curva
semilogaritmica dei valori singolari del sistema in esame.
65
CAP. 4 METODI E MODELLI
Metodo di Lagrange. Nei problemi di ottimizzazione non lineare, quello dei
moltiplicatori di Lagrange è un metodo per trovare i massimi e i minimi di una funzione
di più variabili soggetta a uno o più vincoli di uguaglianza. Questo procedimento
riduce la ricerca dei punti stazionari di una funzione vincolata in n variabili con m
vincoli a trovare i punti stazionari di una funzione non vincolata in (n + m) variabili.
Esso introduce una nuova variabile scalare incognita, il moltiplicatore di Lagrange
appunto, per ogni vincolo e definisce una nuova funzione (la Lagrangiana) in termini
della funzione originaria, dei vincoli e dei moltiplicatori di Lagrange.
In assenza di vincoli, si ha f (x) : Rn → R; se f ∈ C 1 (Rn ) , l’operatore gradiente di f
è il seguente vettore:
[
∂f ∂f
∂f
∇f (x) :=
,
,...,
∂x1 ∂x2
∂xn
]T
Si chiamano punti di stazionarietà locale i punti x ∈ Rn che sono soluzioni del seguente
sistema non lineare:
∇f (x) = 0
(4.2.7)
Questa condizione necessaria di minimo è anche sufficiente se f è funzione convessa.
In presenza di vincoli, si ha il problema seguente:
min {f (x) | hi (x) = 0, i = 1, 2, · · · , m}
(4.2.8)
Definita la funzione Lagrangiana del problema (4.2.8) la seguente espressione:
L(x, λ) := f (x) −
m
∑
λi · hi (x)
(4.2.9)
i=1
i λi ∈ Rm sono i moltiplicatori di Lagrange.
Teorema di Lagrange. Condizione necessaria perchè un punto x∗ sia minimo di
f(x) e rispetti i vincoli hi (x) = 0 i = 1, 2, · · · , m è:
66
CAP. 4 METODI E MODELLI
∂L(x∗ , λ∗ )
= 0
∂x
∂L(x∗ , λ∗ )
= 0
∂λ
per qualche λ∗ . Se la Lagrangiana è convessa, la condizione è anche suffciente.
La prima condizione produce un nuovo sistema di equazioni, la seconda restituisce i
vincoli di ugualianza. Risolvendo congiuntamente i due sistemi si arriva alla soluzione.
Per la dimostrazione e i dettagli di quanto esposto si rimanda alla bibliografia [25].
La teoria qui esposta trova applicazione al problema 4.1 se il procedimento di regolarizzazione necessario viene riformulato come un problema di minimizzazione vincolata.
Il metodo di Lagrange, infatti, è stato utilizzzato in questo lavoro per determinare
le correnti filamentari a partire da un’informazione nota in ingresso, minimizzando
un certo funzionale di costo scelto tra: energia, campo magnetico, norma, derivata e
rapporto incrementale (per i dettagli vedere [26]).
4.2.2
Metodo dei momenti di corrente
Si utilizza questo metodo per vincolare i profili di corrente all’equazione del vuoto di
Grad-Shafranov.
Data una certa condizione di equilibrio, è stato dimostrato che fornisce una buona
descrizione del campo e del flusso all’esterno del plasma [27]. I momenti di corrente
sono inoltre ampiamente utilizzati per ottenere i parametri di controllo del plasma
(corrente totale, posizione del centroide di corrente, ecc..) in quanto sono facilmente
calcolabili a partire da segnali di tipo magnetico.
Si analizza ora la classe di integrali che esprimono analiticamente i momenti di densità
di corrente toroidale JT in Ω come integrali delle combinazioni lineari del campo
67
CAP. 4 METODI E MODELLI
magnetico poloidale su ∂Ω.
Sia χ una funzione arbitraria che soddisfa l’equazione omogenea di equilibrio in Ω
e sia Ψ la funzione di flusso poloidale che soddisfa l’equazione ∆∗ Ψ = −µrJT . Si
utilizza la seconda identità di Green per l’operatore ∆∗ :
(
)
∫
I
∂χ
1
1
∂Ψ
∗
∗
Ψ
ds
(Ψ∆ χ − χ∆ Ψ) dS =
−χ
∂n
∂n
Ω rµ0 r
∂Ω rµ0 r
(4.2.10)
e la si applica alla coppia (χ, Ψ) per ottenere la relazione fondamentale necessaria al
calcolo dei momenti:
I
∫
χJT dS =
Ω
∂Ω
1
rµ0 r
(
∂χ
∂Ψ
Ψ
−χ
∂n
∂n
)
ds
(4.2.11)
Il momento di densità di corrente viene, dunque, espresso in termini dei valori di flusso
sul boundary ∂Ω. Si noti che da ∆∗ Ψ = 0 segue
Ψ e della sua derivata normale ∂Ψ
∂n
(
)
H
che µ10 r ∂χ
ds = 0, dunque nella relazione (4.2.11) non c’è dipendenza dalla scelta
∂n
della costante arbitraria additiva al flusso Ψ. Ciò si può esprimere con l’introduzione
di una funzione coniugata ξ secondo la seguente equazione:
(
)
ξ
1
∇
=
∇χ × ∇φ
µ0 r
µ0 r
(4.2.12)
la quale certamente ammette una soluzione vincolata a ∆∗ ξ = 0.
Questa definizione implica l’identità:
1 ∂χ
∂ (µ0 r−1 ξ)
=−
µ0 r ∂n
∂s
dove
∂
∂s
è la derivata lungo ∂Ω nella direzione positiva (senso orario sulla frontiera).
L’integrazione per parti dell’equazione (4.2.11) elimina il termine Ψ in favore o di
o rispetto alla circuitazione del campo magnetico:
(
)
∫
H
1
∂Ψ
∂Ψ
Qn ≡ Ω χJT dS = ∂Ω
−χ
ξ
ds
µ0 r
∂s
∂n
H 1
(ξBn + χBs ) ds
= ∂Ω
µ0
∂Ψ
∂s
(4.2.13)
68
CAP. 4 METODI E MODELLI
dove:
1. Qn indica il momento di ordine n della distribuzione di corrente JT per la colonna
di plasma;
2. Bn e Bs costituiscono le misure magnetiche;
3. χ e ξ sono opportune funzioni geometriche.
Questo metodo permette, dunque, di misurare la distribuzione delle correnti indipendentemente dalla distribuzione delle sorgenti esterne, le quali contribuiranno comunque alla ricostruzione della mappa di flusso finale.
Resta ancora da mostrare come vengono calcolati analiticamente gli integrali proposti
avendo a disposizione solo un insieme discreto di misure.
In coordinate cilindriche la relazione tra χ e ξ si esprime come:
( )
∂ ξ
1 ∂χ
= −
∂r ( r )
r ∂z
∂
ξ
∂χ
1
=
∂z r
r ∂r
(4.2.14)
Per la coppia di equazioni:
∆∗ χ = 0
=⇒
ξ
∆ =0
r
ci sono coppie indipendenti di soluzioni coniugate (χ, ξ), ne presentiamo solo alcune:
1. χ = 1, ξ = 0
2. χ = z, ξ = −rlogr
3. χ = 0, ξ = r
4. χ = r2 , ξ = 2rz
69
CAP. 4 METODI E MODELLI
Da queste coppie di valori e da altre relazioni più complesse si ottengono i momenti
di corrente di vario ordine; nella tabella 4.1 se ne elencano i principali in ordine di
importanza e di misurabilità.
Ordine n
Espressione Analitica
0
Q1 =
2
Q2 =
3
Q3 =
4
6
j · dS = IP
Corrente di Plasma
zj · dS = ZP · IP
Momento Verticale
Ω
r2 j · dS = RP2 · IP
Momento Radiale
Ω
r2 zj · dS = eS · IP
Ellitticità obliqua
Q0 =
1
5
∫
Q4 =
Q5 =
Q6 =
∫ (
Ω
∫ (
Ω
Significato Fisico
Ω
∫
Ω
∫
∫
)
r2 z 2 − 14 r4 j · dS = eZ · IP
Ellitticità Verticale
)
r2 z 3 − 34 r4 z j · dS = δU P · IP
Triangolarità Superiore
)
r2 z 4 − 32 r4 z 2 + 18 r6 j · dS = δLOW · IP
Triangolarità Inferiore
∫ (
Ω
Tabella 4.1: Lista dei momenti di corrente più utilizzati.
Eccetto i primi due momenti, i cui valori di χ e ξ sono ai punti 1 e 2, una formulazione generale in forma polinomiale da cui ricavare i momenti di qualsiasi ordine è
riassunta nella seguente espressione tratta da [28]:
( z )n−2k−2
∑f loor(n/2)−1
(n − 1)!
(−4)−k
χn = rn · k=0
2 · k!(k + 1)!(n − 2k − 2)! r
( z )n−2k−1
∑
(n − 1)!
ceil(n/2)−1
(−4)−k
ξn = rn · k=0
(k!)2 (n − 2k − 1)! r
n≥2
n≥2
(4.2.15)
Nella figura seguente si evidenzia l’effetto che un determinato ordine di momento ha
sulla mappa di flusso. A parte l’ordine 0 che identifica la corrente di plasma, questi
grafici aiutano a capire il significato fisico scritto nella tabella 4.1.
70
CAP. 4 METODI E MODELLI
2
2
2
1.5
1.5
1.5
1
1
1
0.5
0.5
0.5
0
0
0
-0.5
-0.5
-0.5
-1
-1
-1
-1.5
-1.5
-1.5
-2
1.5
-2
2
2.5
3
3.5
4
1.5
-2
2
2.5
3
3.5
4
1.5
2
2
2
1.5
1.5
1.5
1
1
1
0.5
0.5
0.5
0
0
0
-0.5
-0.5
-0.5
-1
-1
-1
-1.5
-1.5
-1.5
-2
1.5
-2
2
2.5
3
3.5
4
1.5
2
2.5
3
3.5
4
2
2.5
3
3.5
4
-2
2
2.5
3
3.5
4
1.5
Figura 4.3: Polinomi χ dei momenti di corrente dall’ordine 1 (in alto a sx) all’ordine
6 (in basso a dx). Il plasma è schematizzato come un’ellisse.
4.2.3
Schema a Blocchi
Se consideriamo il blocco di figura 4.2 come un subsystem di Simulink, lo schema
di figura 4.4 può essere interpretato come il suo contenuto interno. Esso esprime in
forma matriciale i passaggi necessari per ottenere i profili di corrente, date le misure
magnetiche come input. In questa sezione si osservano nel dettaglio tutti i componenti
che costituiscono il codice implementato in ambiente Matlab.
INPUT. Gli ingressi sono composti da un certo insieme di misure di flusso derivanti dai sensori disposti come mostrato in figura 4.5. Queste misure dipendono da
quali sensori sono attivi e funzionanti, dal numero di impulso scelto (relativo all’anno
di campagna in esame) e dall’intervallo temporale desiderato (in generale, la scarica
viene registrata dai 40 agli 80 secondi). I segnali vengono caricati dal database del
JET come segnali JPF (Jet Pulse File) tramite una libreria come l’mdsplus 3 . Oltre
3
Software per l’acquisizione e il salvataggio di dati scientifici derivanti da esperimenti o codici di
simulazione [29].
71
Figura 4.4: Schema a blocchi che implementa il modello di plasma, di ferro e delle coils poloidali.
CAP. 4 METODI E MODELLI
72
CAP. 4 METODI E MODELLI
al vettore di misure, l’input è costituito dalle 10 correnti che scorrono nei circuiti del
campo poloidale. La modalità con la quale vengono raggruppati in circuiti le varie
bobine PF è stata già discussa nella sezione 2.1. Le dimensioni dei vettori in esame è
così riassunta:
• 52 misure magnetiche + 4 correnti di divertore ⇒ m ∈ R56×1 ;
• 10 correnti dei circuiti PF ⇒ IP F ∈ R10×1
Real to Virtual Measurement. È stata messa in evidenza la necessità di individuare una circuitazione attorno alla sorgente di corrente che vogliamo individuare.
Questa circuitazione non è sufficientemente determinata se consideriamo le sole misure magnetiche a disposizione. Nel passaggio dal continuo al discreto, infatti, la
circuitazione dovrebbe essere espressa come la sommatoria di un infinito numero di
punti. Dato il numero ridotto di misure magnetiche distribuite attorno al vessel (52
in totale), è indispensabile simularne un numero finito e idoneo per avere un percorso
chiuso il più fitto possibile (vedere figura 4.5). Ciò è reso possibile, al momento, utilizzando il codice XLOC. Dalle misure reali si simulano, dunque, un elevato numero
di misure lungo la circuitazione con sufficiente accuratezza. Queste misure, data la
loro natura, sono state definite misure virtuali.
La dimensione di questa matrice è: R2160×56 . Il valore di 2160 (720 · 3) è dato dal
fatto che i punti virtuali simulati sono 720 ma sono espressi rispetto alle componenti
di campo Br , Bz e ∆Ψ. La differenza di flusso è data dal valore nel punto successivo
meno quello nel punto precedente, ossia ∆Ψi = Ψi+1 − Ψi .
Circuit to Virtual. Questo elemento del modello permette di ricavare l’effetto
sulle misure virtuali delle correnti dei circuiti poloidali. Il blocco è costituito da due
matrici in cascata. La prima, la CircuitToFilaments, permette di passare dalla rap-
73
CAP. 4 METODI E MODELLI
Sensori Reali
Sensori Virtuali
2
1.5
1
0.5
Z
0
−0.5
−1
−1.5
−2
0.5
1
1.5
2
2.5
3
R
3.5
4
4.5
5
5.5
Figura 4.5: Posizione dei sensori magnetici reali e dei punti virtuali simulati da XLOC.
presentazione circuitale dei PF alla rappresentazione più dettagliata a filamenti.
Data la lista dei circuiti e delle bobine, si individua, prima di tutto, da quali bobine è cosituito ciascun circuito (in relazione alla tabella 2.1) e se ne esegue, poi, la
modellizzazione filamentare. Ciò significa che si approssima il loro comportamento
elettromagnetico con un opportuno numero di filamenti percorsi da corrente.
Per chiarezza, si riporta l’esempio della bobina P1EU.
Figura 4.6: Schema a blocchi delle due matrici che determinano il passaggio dalle
correnti dei circuiti del campo poloidale ai punti virtuali.
Essa appartiene al circuito PRIMARY-P1 con la polarizzazione determinata dalla disposizione del generatore di corrente relativo (vedere figura 2.2(a)) ed è formata da
due parti uguali le cui caratteristiche geometriche nella realtà sono: larghezza di 0.337
74
CAP. 4 METODI E MODELLI
m, altezza di 0.505 m e numero di spire pari a 71. La modellizzazione scelta consiste
nel discretizzare la superficie della bobina con un numero idoneo di filamenti; in particolare, se ne scelgono 70 per avere un elevato grado di accuratezza (in quanto questa
bobina appartiene ad un circuito fondamentale per lo shape controller). Poichè la
corrente in ingresso alla coil è in [Ampere · T urn] e si vuole mantenere inalterata la
quantità di corrente in ingresso e in uscita nonostante la modellizzazione filamentare,
è necessario pesare opportunamente ciascun filamento. Il peso scelto è uniforme per
tutti i filamenti ed è dato dal rapporto:
Nturns
.
Nf ilamenti
Si riporta, nel dettaglio, la scelta
del numero di filamenti per ciascuna coil di PF e il loro raggruppamento in circuiti in
figura 4.7.
Modellizzazione Filamentare dei 10 circuiti del campo poloidale
Primary P1
PFX
3
SHAPE
FRFA
2
Vertical U
Vertical L
1
Div D1
Z [m]
Div D2
0
Div D3
Div D4
−1
−2
−3
−1
0
1
2
3
R [m]
4
5
6
7
8
Figura 4.7: Rappresentazione filamentare dei 10 circuiti.
La seconda matrice, la FilamentsToVirtual, è costituita da tutti i coefficienti che
servono per ricavare i valori di flusso e campo dalle correnti in ingresso ai circuiti delle
75
CAP. 4 METODI E MODELLI
TOT
Nome Bobina
P3MU
P1EU
P1CU
P1CL
P1EL
P3ML
P2SUI
P2SUE
P3SU
P3SL
P2SLE
P2SLI
P2RU
P3RU
P3RL
P2RL
P4U
P4L
D1
D2
D3
D4
22 bobine
n◦ filamenti
2
70
70
70
70
2
1
1
1
1
1
1
16
20
20
16
64
64
16
15
15
21
557 filamenti
Tabella 4.2: Modellizzazione di ciascuna coil del campo poloidale in base al numero
di filamenti.
misure virtuali. Questa matrice è composta dalle Green Functions relative a tutte le
misure virtuali (720) per ciascun filamento di ciascuna coil PF (557). Le dimensioni
delle matrici sono:
• CircuitsT oF ilaments ∈ R10×557 ;
• F ilamentsT oV irtual ∈ R2160×557 ;
• CircuitsT oV irtual = (F ilamentsT oV irtual) · (CircuitsT oF ilaments)T
∈
R2160×10 .
76
CAP. 4 METODI E MODELLI
Dopo il primo sommatore di figura 4.4, inizia l’implementazione del modello filamentare dedicato al plasma. Le variabili che possono essere settate sono:
I) scelta semi-empirica del numero e della posizione dei filamenti. Bisogna individuare un compromesso tra complessità computazionale e accuratezza della
ricostruzione. Dopo varie simulazioni eseguite in [26], la griglia scelta è formata
da 100 filamenti disposti all’interno del vessel e concentrata nella parte centrale
(dove il plasma si trova per la maggior parte del tempo durante una scarica).
La figura 4.8 presenta l’insieme di filamenti utilizzato;
II) griglia dei punti virtuali simulati da XLOC (figura 4.5);
III) metodo di regolarizzazione: TSVD (scelta del valore di tolleranza) o metodo di
Lagrange (scelta dei valori correttivi);
IV) ordine dei momenti di corrente;
V) tipologia del metodo dei momenti (descritta nel dettaglio per la matrice successiva).
Virtual to Moments. Questa matrice lega le misure virtuali ai momenti di
Shafranov, come visto nella sezione 4.2.2. In particolare, fa uso della rappresentazione
polinomiale (4.2.15). Il modello offre la possibilità di risolvere il problema mal-posto
4.1 con le seguenti varianti di metodo:
a) metodo dei momenti di corrente centrati in (Rc , Zc ) = (0, 0);
b) metodo dei momenti di corrente centrati nei valori medi delle coordinate radiali e
verticali dei filamenti scelti per il plasma;
77
CAP. 4 METODI E MODELLI
Posizione dei filamenti di plasma e di ferro
5
100 Filamenti di plasma
140 Filamenti di ferro
4
3
2
1
Z
0
−1
−2
−3
−4
−5
−1
0
1
2
3
4
5
6
7
8
R
Figura 4.8: Collocazione dei filamenti di plasma e di ferro.
c) metodo della TSVD applicata alla matrice delle Green-Functions tra punti virtuali
e posizione dei filamenti di plasma;
d) combinazione dei 3 metodi citati: a) + b) o a) + c) o a) + b) + c).
Le dimensioni della matrice sono: V irtualT oM oments ∈ R11×1440 , ossia il numero di
momenti scelti (11) rispetto alle misure virtuali (720 per Br e 720 per Bz ).
Moments to Filaments. Questa matrice viene calcolata a partire dalla matrice
FilamentsToMoments in base al metodo di regolarizzazione scelto (TSVD o Lagrange). La FilamentsToMoments, a sua volta, viene costruita in maniera analoga alla
precedente VirtualToMoments. La differenza consiste nel fatto che i calcoli dei polinomi utilizzati sono riferiti alle posizioni dei filamenti di plasma invece che alle coordinate
dei punti virtuali. Allo stesso modo del caso precedente, si può scegliere di utilizzare le
78
CAP. 4 METODI E MODELLI
espressioni in (4.2.15) per il metodo dei momenti o le altre tecniche di regolarizzazione
viste. La dimensione della matrice è: M omentsT oF ilaments ∈ R100×11 .
OUTPUT 1. Il primo segnale che il modello, visto finora, fornisce in uscita è la
distribuzione filamentare delle correnti di plasma: IP LASM A . A questo punto, però,
non è stato ancora implementato tutto il modello schematizzato in (4.2.3), in quanto
non si è tenuto conto del contributo del ferro e del reale apporto dato dalle correnti
delle PF. Per il momento, le correnti di plasma sono ricavate solo dal sottrarre le IP F ,
note ma ideali (in quanto prive di errori di approssimazione), alle misure magnetiche
di flusso. In formule, ciò significa:
m − IP F =
100
∑
Gi · Ii
P LASM A
(4.2.16)
i=1
Per ottenere, invece, l’implementazione del modello completo, occorre:
1) togliere al primo membro della (4.2.16), definito come segnale di errore e1 , l’effetto
del plasma e si ottiene e2 (vedere figura 4.4);
2) utilizzare l’errore e2 per il contributo del ferro e si ricava e3 ;
3) ciò che resta, distribuirlo come errore sulle correnti reali che scorrono nei circuiti
e si ottiene e4 ;
4) infine, distribuire il residuo e4 di nuovo sui filamenti di plasma per migliorare i
calcoli eseguiti precedentemente. Il fatto che quest’ultimo contributo di corrente
possa, in realtà, essere l’effetto combinato di ferro, PF e plasma non è determinante,
pertanto viene attribuito per semplicità esclusivamente al plasma.
Filaments to Virtual. Una volta determinata la distribuzione di corrente nei
filamenti di plasma, se ne deve sottrarre l’effetto delle misure virtuali. Per tale scopo è
79
CAP. 4 METODI E MODELLI
necessario definire una matrice che permetta di calcolare il flusso e il campo prodotto
da ogni singolo filamento in ogni posizione relativa alle misure virtuali.
La matrice in questione sarà composta sostanzialmente dalle Green-Functions di tutti
i filamenti di plasma rispetto ai punti virtuali. I coefficienti di Green sono calcolati per le componenti Br , Bz e ∆Ψ. Le dimensioni della matrice sono dunque:
F ilamentsT oV irtual ∈ R2160×100 .
All’uscita del secondo sommatore di figura 4.4, si hanno, dunque, le misure virtuali
a cui è stato rimosso l’effetto del plasma. La seconda correzione prevede ora l’identificazione della componente sulle misure virtuali dovuta all’effetto delle strutture
passive. Il modello dipenderà dai seguenti parametri:
I) scelta semi-empirica del numero e della posizione dei filamenti. Dopo varie
simulazioni, la distribuzione scelta è formata da 140 filamenti disposti lungo i
bordi relativi ad una limb del JET (confrontare la figura 1.10 con i filamenti di
ferro in figura 4.8);
II) il metodo di regolarizzazione utilizzato è esclusivamente il TSVD (con la scelta
sul valore di tolleranza).
Virtual to Iron. Questa matrice si ottiene dall’inversione della IronToVirtual
applicando una regolarizzazione con TSVD. In figura 4.9 si evidenziano i valori singolari di quest’ultima. La linea rossa indica il valore di tolleranza scelto, pari a 10−5 ,
utilizzato per scartare le componenti troppo piccole della matrice. Sebbene questa
procedura permetta di considerare il contributo del ferro in maniera accettabile (sarà
chiaro nei risultati del capitolo 5), non è una modellizzazione accurata. Infatti, tale
rappresentazione non tiene conto dei comportamenti non lineari ed isteresi del ferro
nelle fasi transitorie di una scarica tipica. Poichè l’effetto delle strutture metalliche
80
CAP. 4 METODI E MODELLI
(limbs, pilastro centrale, vessel, strutture di supporto, etc...), è indubbiamente rilevante, un miglioramento del modello può consistere proprio in una sua più accurata
rappresentazione. Occorrerebbe, a tal prosposito, conoscere il livello di saturazione
del ferro in maniera dinamica durante una scarica e utilizzare un modello appropriato
che valuti la sua magnetizzazione.
Le dimensioni della matrice sono: V irtualT oIron ∈ R140×2160 .
−5
1.6
x 10
1.4
1.2
VALORE DI SOGLIA
Ampiezza
1
0.8
0.6
0.4
0.2
X: 12
Y: 8.699e−08
0
0
20
40
60
80
100
Ordine dei valori singolari
120
140
Figura 4.9: Aandamento dei 140 valori singolari della IronToVirtual e la soglia scelta.
OUTPUT 2. Il secondo segnale che il modello, visto finora, fornisce in uscita è
la distribuzione filamentare delle correnti di ferro IIRON :
m − IP F −
100
∑
i=1
Gi · I i
P LASM A
=
140
∑
G i · Ii
IRON
(4.2.17)
i=1
Iron to Virtual. Come fatto in precedenza per rimuovere la componente di
plasma dalle misure virtuali, si deve ora rimuovere l’effetto del ferro dalle stesse.
Ancora una volta, ciò si traduce nel calcolo delle Green-Functions dei 720 punti virtuali
relative ai 140 filamenti di ferro.
Le dimensioni della matrice sono: IronT oV irtual ∈ R2160×140 .
81
CAP. 4 METODI E MODELLI
All’uscita del terzo sommatore di figura 4.4, si hanno, dunque, le misure virtuali
corrette dall’effetto del plasma e del ferro. L’ultimo effetto viene ora associato alle
bobine di campo poloidale. Il contributo che si identifica sarà tipicamente un contributo di corrente molto piccolo, a volte trascurabile, ma viene tuttavia incluso per
completezza nel modello. Le correnti di PF, infatti, sono conosciute in quanto costituiscono un input al sistema (derivano direttamente da misure mediante Rogowsky)
ma vengono corrette per ovviare ad inevitabili errori di misura e all’approssimazione
apportata dalla modellizzazione delle coils stesse.
I parametri del modello sono:
I) numero, tipologia e configurazione dei circuiti (presenza o meno di alcune bobine,
polarizzazioni e connessioni differenti tra generatori di corrente e bobine, ecc..);
II) modellizzazione filamentare di ciascuna bobina. La scelta del numero e della posizione dei filamenti ha portato alla distribuzione di 557 filamenti, come descritto
in tabella 4.2 e mostrato in figura 4.7;
III) il metodo di regolarizzazione utilizzato è esclusivamente il TSVD (stesso valore
di soglia adottato per il ferro).
Virtual to Circuit. Questa matrice viene costruita dall’inversione della Circuit
to Virtual applicando una regolarizzazione con TSVD.
Le dimensioni della matrice sono: V irtualT oCircuit ∈ R10×2160 .
OUTPUT 3. Il terzo segnale che il modello, visto finora, fornisce in uscita è la
distribuzione filamentare delle correnti che scorrono nelle bobine di PF IP F :
m − IP F −
100
∑
i=1
Gi · Ii
P LASM A
−
140
∑
i=1
G i · Ii
IRON
=
10
∑
Gi · ∆Ii
PF
(4.2.18)
i=1
82
CAP. 4 METODI E MODELLI
Il segno di ∆ sta ad indicare che questa quantità correttiva si applicherà ai valori noti
delle IP F .
Circuit to Virtual. Questa matrice è la stessa già utilizzata per poter passare
dalla rappresentazione circuitale a quella filamentare dei PF (schema 4.6).
In uscita al quarto sommatore di figura 4.4, il residuo sulle misure virtuali viene
interamente associato al plasma. Anche questa è una correzione, ∆I, che va aggiunta
alla distribuzione di corrente precedentemente trovata.
Nella realtà, tale contributo può essere dovuto ad ognuna delle possibili componenti,
ferro, PF o plasma, ma non avendo informazioni più dettagliate e, per semplicità,
viene associato al plasma. L’entità di questa correzione è comunque molto piccola.
Virtual to Filaments. Per poter scrivere IP LASM A + ∆IP LASM A , è necessario
convertire il segnale e4 da distribuzione calcolata rispetto ai virtuali a distribuzione
calcolata rispetto gli stessi filamenti di plasma. Questa matrice, dunque, non è altro
che l’inversa della FilamentsToVirtual già vista precedentemente. Le possibilità di
regolarizzazione possono di nuovo essere la TSVD o il metodo di Lagrange.
Le dimensioni della matrice sono: V irtualT oF ilaments ∈ R100×2160 .
Poichè lo schema a blocchi 4.4 è una combinazione di somme e prodotti tra matrici,
possiamo ottenere una rappresentazione compatta del modello che permetta di passare
direttamente dalle misure reali alla distribuzione di corrente nel plasma, ferro e PF.
In riferimento allo schema 4.2, si ha:
CORRENTI = MATRIX · INPUT
IP LASM A
IF ERRO
IP F
=
]
MP LASM A [
MF ERRO · m
IP F
MP F
[250 × 1]
=
[250 × 66] · [66 × 1]
(4.2.19)
83
CAP. 4 METODI E MODELLI
dove la matrice a blocchi MATRIX è così composta:
1) MP LASM A è la somma delle matrici che permettono di ricavare IP LASM A e ∆IP LASM A .
La dimensione è R100×66 ;
2) MF ERRO è la matrice che permette di ricavare IF ERRO . La dimensione è R140×66 ;
3) MP F è la somma delle matrici che permettono di ricavare IP F e ∆IP F .
La
dimensione è R10×66 .
84
Capitolo 5
RISULTATI E VALIDAZIONE DEL
MODELLO FILAMENTARE
Il capitolo riassume le analisi effettuate per verificare la validità del
modello filamentare utilizzato in questa tesi.
Dopo aver descritto nel dettaglio il significato fisico del modello filamentare, si
presenta, ora, la fase di validazione dello stesso per dimostrarne la reale applicabilità
alle varie macchine da fusione.
I risultati necessari a tale scopo sono stati generati con l’utilizzo del codice FELIX,
la cui descrizione è presentata in sezione 5.1.
Nel paragrafo 5.2, si riportano i test eseguiti a conferma dell’assunzione secondo la
quale, sotto determinate condizioni, un certo insieme di filamenti percorsi da corrente
hanno un effetto di campo e flusso paragonabile ad un’unica sorgente puntiforme.
I grafici del paragrafo 5.3 evidenziano come i contributi magnetici apportati da ciascun
insieme di filamenti si sommano per formare la mappa di flusso totale.
Il paragrafo 5.4 presenta le simulazioni eseguite con la modellizzazione polinomiale di
XLOC, quella di EFIT e quella filamentare. Questa sezione evidenzia non solo il fatto
che il modello filamentare ottiene una ricostruzione topologica paragonabile a quella
degli altri due codici nella gran parte delle configurazioni di plasma ma ottiene anche
85
CAP. 5 RISULTATI E VALIDAZIONE DEL MODELLO FILAMENTARE
un evidente miglioramento in determinati punti del boundary. I confronti presentati
sono relativi sia alle mappe di flusso sia ai vari parametri geometrici del controllo.
5.1
Felix come tool
Questa sezione presenta l’evoluzione di XLOC: il codice FELIX, acronimo di Flux
Estimator for LImiter and X-point configurations. È un codice sviluppato negli ultimi
anni dal Plasma Operation Department per eseguire il commissioning
1
delle misure
magnetiche e per determinare forma e posizione di plasma sia offline che online. Come
verrà evidenziato in Appendice B, esso è pensato per un contesto real-time e sviluppato
tramite l’implementazione di GAM (Generic Application Module [31]). Questo tool
si divide in due parti: la prima riguarda la modellizzazione del campo magnetico,
mentre la seconda ottiene la forma del plasma dall’ultima superficie chiusa di flusso.
In particolare, proprio nella prima di queste due fasi si evidenzia l’eredità tratta da
XLOC e il suo superamento. Felix, infatti, offre nel suo file di configurazione la
possibilità di definire differenti modelli di interpolazione necessari al calcolo del flusso
e/o del campo magnetico. Al momento, questa interpolazione può essere polinomiale
(esattamente XLOC visto nella sezione 4.1) o rispetto ad un insieme opportuno di
filamenti di corrente (esattamente il metodo filamentare visto nella sezione 4.2).
Un altro vantaggio derivante dal codice Felix consiste nel poterlo considerare, dal
punto di vista della programmazione, una raccolta di algoritmi in grado di passare
dalla descrizione fisica del macchinario in un programma esecutivo. Di solito, infatti,
la scrittura di algoritmi e codici è fortemente machine-dependent, ossia è permesso
il loro utilizzo solo per una specifica macchina. Al contrario, invece, Felix è stato
pensato come tool independente dal tokamak utilizzato; è completamente portabile e
1
fase che precede l’inizio della campagna sperimentale per verificare e testare tutti i sistemi.
86
CAP. 5 RISULTATI E VALIDAZIONE DEL MODELLO FILAMENTARE
non è in alcuna parte specifico solo per il JET. Grazie al suo alto livello di flessibilità
e configurabilità (vedere Appendice B per i dettagli), questo nuovo codice è un buon
compromesso tra precisione ricostruttiva dei modelli inseriti e tempi di esecuzione.
In questo capitolo, Felix è stato configurato per il modello polinomiale o per quello
filamentare a seconda delle simulazioni e dei confronti che si volevano ottenere di volta
in volta.
5.2
Flusso di una sorgente filamentare
Il primo test che si esegue è la verifica di quanto affermato nel paragrafo 4.2: una
griglia di filamenti può essere identificata come un’unica sorgente di corrente se il
punto di osservazione è sufficientemente distante. Infatti, l’interazione delle linee di
campo o di flusso tra un filamento e l’altro diminuisce se ci si allontana dalla loro
posizione (figura 5.1). In figura 5.2 si ha un confronto immediato dell’analogia di
effetti tra distribuzione a 9 filamenti e distribuzione a 1 filamento. In quest’ultimo,
scorre una corrente pari alla somma delle correnti che circolano nei 9 filamenti.
Da quanto mostrato, si può dedurre che è bene posizionare i filamenti lontani dalla
diagnostica magnetica più della distanza tra ciascuno di loro, così da poter trascurare
i dettagli vicino ai filamenti, misurarne la sovrapposizione degli effetti e identificarli
come una sola distribuzione.
87
CAP. 5 RISULTATI E VALIDAZIONE DEL MODELLO FILAMENTARE
Linee di flusso Ψ con 9 filamenti
Zoom sui filamenti
3
1.6
2.5
1.4
2
1.2
1.5
Z [m]
1
Z [m] 1
0.5
0.8
0
0.6
-0.5
0.4
-1
1.5
2
2.5
3
R[m]
3.5
4
4.5
2.6
2.8
3
3.2
3.4
R[m]
Figura 5.1: In questa figura si evidenzia il fenomeno di interazione delle linee di flusso
tra varie sorgenti di corrente. Le linee diventano meno ondulate man mano che ci si
allontana dai filamenti. A destra c’è uno zoom della figura per mostrare, invece, le
irregolarità a distanze vicine.
Linee di flusso Ψ con 9 filamenti
Linee di flusso Ψ con 1 filamento
3
3
2.5
2.5
2
2
1.5
1.5
1
1
0.5
0.5
0
0
−0.5
−0.5
Z [m]
−1
1.5
2
2.5
3
R[m]
3.5
4
4.5
−1
1.5
2
2.5
3
R[m]
3.5
4
4.
Figura 5.2: Questa figura confronta la mappa di flusso data da una griglia filamentare
(a sinistra) con una ottenuta dal posizionamento di un’unica sorgente di corrente (a
destra).
88
CAP. 5 RISULTATI E VALIDAZIONE DEL MODELLO FILAMENTARE
5.3
I diversi contributi di flusso
La griglia dei punti rispetto ai quali verranno calcolate tutte le mappe è un rettangolo
comprendente il vessel e dimensionato in questo modo:
R ∈ [1.5 ÷ 4.2] m
Z ∈ [−2 ÷ 2.2] m
Questo riquadro è stato preso rispetto al centro della macchina, il quale è posto al
centro del circuito P1.
Come è stato visto in sezione 4.2.1, la mappa di flusso da identificare è la somma di
differenti contributi.
Effetto delle IP F . La figura 5.3 mostra il flusso prodotto nella zona di vessel
dalle sole correnti delle coils poloidali per l’impulso n◦ 66326 nell’istante di tempo
t = 60s (fase centrale della scarica).
Effetto delle IP F +IF ERRO . La figura 5.4 mostra, a sinistra, cosa avviene quando
si considera l’effetto legato alle correnti che scorrono nel ferro. Aggiungere queste
componenti comporta uno sbilanciamento delle linee di flusso verso l’interno della
macchina, dove la presenza del materiale è sicuramente dominante.
Effetto delle IP F + IF ERRO + IP LASM A . La figura 5.4 mostra, a destra, la fase in
cui vengono considerati anche i filamenti di plasma (disegnati con puntini blu). Si possono notare isoflusso regolari e congruenti con la ricostruzione magnetica dell’impulso
scelto: posizione corretta dell’X-Point, zona di attrazione dei divertori.
89
CAP. 5 RISULTATI E VALIDAZIONE DEL MODELLO FILAMENTARE
Effetto di Flusso per le I pf
4
Zoom nella zona di diverore
3
0
2
1
−0.5
0
−1
−1
−1.5
−2
−2
−3
−2.5
−4
1
2
3
2
5
PULSE: 66326 TEMPO: 60 [sec]
4
2.5
3
3.5
Figura 5.3: Effetto delle IP F . a) Sono state riportate le posizioni dei circuiti poloidali
per facilitare la comprensione dei movimenti delle linee di flusso. b) È stato eseguito lo
zoom nella regione di divertore per specificare meglio il suo contributo nel determinare
l’X-Point. Come mostrato in b), nell’istante di tempo scelto, le bobine di divertore
più influenti sono quelle relative a D3 e D4, mentre le altre presentano una quantità
di corrente più ridotta.
Effetto di Flusso per: I PF + I FERRO
Effetto di Flusso per: I
2
2
1.5
1.5
1
1
0.5
0.5
PF
+I
FERRO
+I
PLASMA
Z [m]
0
0
-0.5
-0.5
-1
-1
-1.5
-1.5
-2
1.5
2
2.5
3
R [m]
3.5
4
-2
1.5
2
2.5
3
R [m]
3.5
4
Figura 5.4: Effetto delle IP F + IF ERRO + IP LASM A . Il flusso è calcolato con l’aggiunta
dei filamenti di ferro prima e di quelli di plasma dopo. La mappa totale sembra essere
realistica e fedele con la geometria del problema.
90
CAP. 5 RISULTATI E VALIDAZIONE DEL MODELLO FILAMENTARE
5.4
Confronto tra XLOC, EFIT e Modello Filamentare
In questa sezione si riporta la validazione del modello filamentare. I termini di paragone sono costituiti dal codice XLOC e dal codice EFIT. Il parametro di giudizio
è dato da una statistica degli errori commessi nel determinare i parametri geometrici
usati dal sistema di controllo.
La validazione è stata eseguita sulla base di 40 impulsi prelevati dal database del
JET e relativi alle campagne sperimentali svolte dal 2002 al 2005. Questo insieme di
shots copre, nel suo complesso, le varie tipologie di plasma che si possono ottenere al
JET. Durante tutta la fase di scarica, inoltre, la forma di plasma viene distinta in:
1) configurazione limiter: generalmente nello start-up e nella termination del plasma;
2) configurazione X-Point: generalmente nella parte centrale dell’intervallo di tempo.
Può anche accadere che il plasma non arrivi mai in questa configurazione;
3) non convergenza: l’algoritmo ha fallito la ricerca dell’X-Point nella regione assegnata. Il motivo principale è attribuibile a valori di corrente di plasma inferiori ad
una certa soglia.
La figura 5.5 è un esempio di confronto del profilo topologico del plasma tra il modello
filamentare e quello polinomiale sia nell’istante di limiter che di X-Point.
5.4.1
Confronto delle mappe di flusso
I risultati riportati in questa sezione sono relativi alla ricostruzione magnetica di
tutta la mappa di flusso del plasma. Le figure in 5.6 sono due esempi di mappe,
rispettivamente, in limiter e in X-Point. Per poter asserire che la ricostruzione è
corretta, è stato preso come riferimento il boundary dato da EFIT (linea chiusa viola).
91
2
2.5
3
Tempo: 50sec
3.5
4
−1.5
−1.5
1
1.5
2
2.5
3
Tempo: 65sec
3.5
Boundary Path in X−Point
4
4.5
5
XLOC
M. Filamentare
Figura 5.5: Ricostruzione del boundary ottenuta da XLOC e dal Modello Filamentare in un istante di limiter e di X-Point.
0.5
−1
−1
5
−0.5
−0.5
0.5
0
4.5
0.5
0.5
1.5
1
1
1
1.5
XLOC
M. Filamentare
2
0
Z [m]
Boundary Path in Limiter
1.5
2
CAP. 5 RISULTATI E VALIDAZIONE DEL MODELLO FILAMENTARE
92
1
1.5
2
2.5
3
R [m]
3.5
4
−1.5
−2
−1.5
−2
1
1.5
2
2.5
3
R [m]
3.5
4
Impulso: 53045 Istante di tempo: 65 sec
4.5
5
M.Filamentare
EFIT
Figura 5.6: Mappa di Flusso per l’impulso n◦ 53045 in t = 45, istante di limiter, e t = 65 sec, istante di X-Point.
−1
−1
5
−0.5
−0.5
4.5
0
0.5
0.5
0
Z [m]
1
1
2
1.5
M.Filamentare
EFIT
1.5
2
Impulso: 53045 Istante di tempo: 45 sec
CAP. 5 RISULTATI E VALIDAZIONE DEL MODELLO FILAMENTARE
93
CAP. 5 RISULTATI E VALIDAZIONE DEL MODELLO FILAMENTARE
La figura 5.7 presenta un confronto tra la ricostruzione magnetica di XLOC e
quella del modello filamentare. La regione interna di plasma non è di interesse per
questo lavoro ma si sottolinea, comunque, il miglioramento apportato dal modello a
filamenti. Esso, infatti, non presenta la discontinuità delle regioni, propria di XLOC.
XLOC n ° 53045 t = 55 sec
M. Filamentare n
2
2
1.5
1.5
1
1
0.5
0.5
0
0
−0.5
−0.5
−1
−1
−1.5
−1.5
°
53045 t = 55 sec
Z [m]
−2
1.5
2
2.5
3
3.5
−2
1.5
4
R [m]
2
2.5
3
3.5
4
R [m]
Figura 5.7: Confronto delle mappe di Flusso per l’impulso n◦ 53045 in t = 55 sec tra
XLOC e Modello Filamentare.
5.4.2
Confronto dei parametri geometrici
Per una corretta statistica, si sono valutate la media aritmetica e la deviazione standard2 degli errori riscontrati tra XLOC e la modellizzazione filamentare per i seguenti
parametri geometrici:
• coordinate dell’X-Point: Rx , Zx ;
2
La deviazione standard o scarto quadratico medio è un indice di dispersione dei dati intorno al
valore atteso, ossia è una misura di variabilità di una variabile casuale. Ha la stessa unità di misura
dei valori osservati ed è così calcolata:
√ ∑n
2
i=1 (xi − x)
σx =
n
dove
1∑
x=
xi
n i=1
n
è la media aritmetica.
94
CAP. 5 RISULTATI E VALIDAZIONE DEL MODELLO FILAMENTARE
• distanza interna ed esterna tra vessel e boundary: RIG e ROG;
• distanza tra vessel superiore e boundary: TOG;
• valore di flusso al boundary: φ∗ [Wb].
Nel seguito si riportano gli andamenti temporali di queste variabili, distinguendo i
risultati in base alle configurazioni assunte dal plasma.
Configurazione LIMITER. In questa situazione, ha senso eseguire un controllo
di posizione e forma di plasma utilizzando le sole variabili ROG e TOG.
La tabella 5.1 riassume i principali dati statistici ricavati da questa fase di validazione del modello. Come si evince dalla tabella, il TOG è quello che presenta uno
Parametro
ROG
TOG
MEDIA xε [cm]
Min
Max
0.01
0.64
2.20
4.59
STD σε [cm]
Min
Max
1.13
0.62
0.91
2.85
Tabella 5.1: Valori massimi e minimi della media e della deviazione standard di errore.
In questa tabella i 40 impulsi sono stati considerati solo nella loro fase di limiter.
scostamento maggiore tra le due modellizzazioni. Esse sono differenti per la non facile
modellizzazione della parte alta della macchina. Ciò è dovuto al basso numero di bobine di misura e alla forte componente legata alle strutture meccaniche. Nonostante
questo, gli impulsi peggiori sono stati analizzati nello specifico e risultano comunque
accettabili nel range di errore ammissibile.
Per una migliore comprensione dei risultati ottenuti, si riporta, a titolo di esempio,
l’impulso n◦ 53045, la cui corrente di plasma ha l’andamento mostrato in figura 5.8 (si
fa notare che al JET il segno della IP LASM A è stato preso negativo per convenzione).
Si assume che valori di corrente accettabili per la ricostruzione siano quelli inferiori a
-400 kA, come mostrato dalla soglia presente in figura.
95
CAP. 5 RISULTATI E VALIDAZIONE DEL MODELLO FILAMENTARE
0.5
x 10
6
Corrente di Plasma per l’impulso 53045
0
SOGLIA DELLA CORRENTE
−0.5
−1
[A]
−1.5
−2
−2.5
−3
0
10
20
30
40
Time [sec]
50
60
70
80
Figura 5.8: Corrente di plasma dell’impulso n◦ 53045.
Nella figura 5.9 si mostrano gli andamenti nel tempo dei due parametri di interesse.
ROG
0.2
0.15
[m]
XLOC
M. Filamanetare
0.1
0.05
0
40
42
44
46
48
50
52
54
50
52
54
TOG
1
0.8
[m]
0.6
0.4
0.2
40
42
44
46
48
Time [sec] Pulse:53045
Figura 5.9: Andamenti temporali delle distanze ROG e TOG per XLOC e per il
modello filamentare negli istanti di plasma in configurazione limiter.
96
CAP. 5 RISULTATI E VALIDAZIONE DEL MODELLO FILAMENTARE
La media xε e la deviazione standard σε dell’errrore valgono:
a) per il ROG:
xε = 0.64 cm
σε = 0.62 cm
xε = 4.59 cm
σε = 1.14 cm
b) per il TOG:
Come accennato, dai valori qui riportati, è evidente la difficoltà a mantenere sotto
controllo lo spostamento del TOG. In questa fase di limiter, il TOG rappresenta,
comunque, un importante indice della posizione verticale del plasma.
Configurazione ad X-POINT. Per questa configurazione hanno importanza
tutti i parametri geometrici menzionati e se ne riportano i relativi risultati in tabella
5.2. La tabella evidenzia un valore superiore ai 2 cm per la media e la deviazione
Parametro
XPOINTR
XPOINTZ
RIG
ROG
TOG
MEDIA
Min
-0.29
-0.13
-0.31
-1.48
-0.76
xε [cm]
Max
0.26
0.29
2.56
1.15
0.50
STD σε [cm]
Min
Max
0.03
0.29
0.02
0.20
0.07
1.98
0.06
0.59
0.03
2.22
Tabella 5.2: Valori massimi e minimi della media e della deviazione standard di errore.
In questa tabella i 40 impulsi sono stati considerati solo nella loro fase di X-Point.
standard del RIG. L’impulso che corrisponde a questi valori di massimo è il n◦ 53848.
Prima di tutto, vengono disegnati gli andamenti della variabile in questione per i tre
codici di ricostruzione e ciò corrisponde alla figura 5.10. In secondo luogo, si individua
l’istante in cui gli andamenti del RIG per i vari metodi iniziano ad essere divergenti.
Visto che ciò avviene dopo i 65 secondi, ossia verso la fine della scarica, ci si preoccupa del fatto che ci sia sufficiente corrente di plasma per la ricostruzione. Dal segnale
97
CAP. 5 RISULTATI E VALIDAZIONE DEL MODELLO FILAMENTARE
RIG per l’impulso 53848
0.8
0.7
XLOC
M. Filamentare
EFIT
0.6
0.5
0.4
[m]
0.3
0.2
0.1
0
−0.1
40
45
50
55
60
65
TEMPO [sec]
70
75
80
Figura 5.10: Andamento nel tempo del RIG per XLOC, EFIT e Modello Filamentare.
JPF, risulta che nell’istante considerato la corrente vale -1.28 MA. A questo punto,
si verifica se la ricostruzione del boundary fino ai 65 secondi è corretta. Dalla figura
5.10 è possibile concludere che questo impulso termina con un’improvvisa rottura della colonna di plasma. Negli ultimi istanti della scarica, dunque, le bobine di misura
forniscono valori magnetici poco attendibili, per cui nessuna delle tre ricostruzioni dei
vari codici utilizzati può ritenersi corretta. Anche il modello filamentare, nell’implementazione vista finora, non riesce a seguire il plasma nei suoi movimenti veloci.
È importante sottolineare che la modellizzazione filamentare non solo presenta errori
numerici accettabili ma anche un rilevante miglioramento rispetto agli altri codici. La
ricostruzione della frontiera infatti, è in generale molto meno discontinua. Fornendo
informazioni più corrette, questo metodo permette il calcolo di un numero maggiore
di distanze e gap, producendo, così, una ricostruzione più attendibile ed accurata. Il
miglioramento di cui si è fatto cenno, può essere riscontrato dagli zoom presentati per
il boundary di figura 5.11.
98
CAP. 5 RISULTATI E VALIDAZIONE DEL MODELLO FILAMENTARE
ZOOM Scalinatura XLOC
1
0.95
0.9
0.85
0.8
Boundary path PULSE: 53848
XLOC
M. Filamentare
EFIT
2
0.75
0.7
1.5
0.65
0.6
1
0.55
ZOOM Scalinatura XLOC
1.65
0.5
2.1
2.2
XLOC
M. Filamentare
EFIT
0.5
2.3
1.6
0
1.55
ZOOM Scalinatura EFIT
−0.98
1.5
−0.5
−0.99
−1
1.45
2.95
3
3.05
3.1
3.15
3.2
3.25
3.3
−1
−1.01
−1.02
−1.5
−1.03
−1.04
1.5
−1.05
−1.06
2.58
2.6
2.62
2.64
2
2.5
3
Tempo: 65sec
3.5
4
4.5
5
2.66
Figura 5.11: Ricostruzione del boundary e confronto tra XLOC, EFIT e Modello
Filamentare nell’istante t = 65 sec.
Ora, vengono presentati i risultati delle variabili di controllo e i relativi errori.
Nella figura 5.12 si mostrano gli andamenti nel tempo delle coordinate cartesiane
dell’X-Point. Come si può notare, l’accordo di XLOC con il modello filamentare è
buono nella fase centrale dell’esperimento, nella quale il plasma assume la configurazione a divertore (cioè con X-Point).
Nel caso in esame, la media e la deviazione standard dell’errore sono:
a) per la coordinata R dell’X-Point:
xε = 0.01 cm
σε = 0.14 cm
b) per la coordinata Z dell’X-Point:
xε = 0.16 cm
σε = 0.07 cm
99
CAP. 5 RISULTATI E VALIDAZIONE DEL MODELLO FILAMENTARE
X−PointR
2.75
XLOC
M. Filamanetare
2.7
[m]
2.65
2.6
50
55
60
65
70
75
70
75
X−PointZ
−1.2
−1.3
[m]
−1.4
−1.5
−1.6
50
55
60
65
Time [sec] Pulse:53045
Figura 5.12: Andamenti nel tempo delle coordinate R e Z dell’X-Point per la fase di
divertore.
La figura 5.13 mostra l’evoluzione temporale delle variabili RIG, ROG e TOG. I valori
numerici della media e della deviazione standard dell’errore sono:
a) per il RIG:
xε = 0.10 cm
σε = 0.14 cm
b) per il ROG:
xε = −0.45 cm
σε = 0.08 cm
c) per il TOG:
xε = 0.28 cm
σε = 0.20 cm
Flusso al Boundary. Il calcolo del flusso per la frontiera del plasma è stato
eseguito facendo la media dei valori forniti da tre bobine Flux-loop (vedere figura
2.10). I valori sono dati dalla formula espressa in (2.1.1) nel caso di limiter e come
flusso relativo al punto di X-point nel caso di configurazione a divertore. Questa
100
CAP. 5 RISULTATI E VALIDAZIONE DEL MODELLO FILAMENTARE
RIG
0.16
0.14
0.12
[m]
0.1
0.08
0.06
0.04
50
55
60
65
70
75
ROG
0.12
XLOC
M. Filamanetare
0.1
0.08
[m]
0.06
0.04
0.02
50
55
60
65
70
75
65
70
75
TOG
0.4
0.35
[m]
0.3
0.25
0.2
50
55
60
Time [sec] Pulse:53045
Figura 5.13: Andamenti delle distanze RIG, ROG e TOG tra i due metodi di
ricostruzione negli istanti di X-Point. L’errore commesso è di pochi millimetri.
procedura potrebbe essere estesa ad un insieme maggiore di bobine ma l’accuratezza
risulta già soddisfacente. La figura 5.14, infatti, è il confronto tra i valori calcolati da
XLOC e quelli otttenuti dal modello filamentare nell’arco di tutta la scarica (quindi,
senza distinguere tra le diverse configurazioni di plasma).
Pulse number: 53045 Boundary Flux
2.5
2
XLOC
M.Filamentare
1.5
1
0.5
[Wb]
0
−0.5
−1
−2
40
45
NON
CONVERGENZA
CONFIGURAZIONE
DI X−POINT
LIMITER
−1.5
50
55
60
Time [sec]
65
70
75
80
Figura 5.14: Andamento nel tempo del valore di flusso al boundary per i 40 secondi
dell’esperimento n◦ 53045.
101
CAP. 5 RISULTATI E VALIDAZIONE DEL MODELLO FILAMENTARE
Altri parametri geometrici. Dopo aver analizzato i principali parametri utilizzati dal sistema di controllo, si presentano, ora, gli andamenti di altre variabili
geometriche. Si tratta dei gaps n◦ 6, n◦ 18 e degli strike-points sinistro e destro rispetto all’X-Point (per la loro posizione si faccia riferimento alle figure in 5.15). Questi
rivestono un ruolo importante non per il controllo di forma e posizione ma per gli altri
sistemi di protezione e sicurezza, quali Walls e Beta-Li.
GAP n°6
0.25
0.2
[m]
0.15
XLOC
M. Filamanetare
0.1
50
55
60
65
70
75
65
70
75
°
GAP n 18
0.2
0.15
[m]
0.1
0.05
0
50
55
60
Time [sec]
(a)
Strike−Point Right−R
Strike−Point Left−R
3
2.5
XLOC
M. Filamanetare
XLOC
M. Filamanetare
2.45
[m]
2.95
[m]
2.4
2.9
2.35
50
55
60
65
70
75
2.85
50
55
60
65
70
75
70
75
Strike−Point Right−Z
Strike−Point Left−Z
−1.6
−1.55
−1.6
−1.65
[m]
[m]
−1.65
−1.7
−1.7
−1.75
50
55
60
65
Time [sec]
(b)
70
75
−1.75
50
55
60
65
Time [sec]
(c)
Figura 5.15: Andamenti nel tempo dei gaps n◦ 6 e n◦ 18 (a), delle coordinate R e Z
dello Strike-Point sinistro (b) e destro (c) per l’impulso n◦ 53045.
102
Capitolo 6
RICOSTRUZIONE DI PLASMI
PARTICOLARI
Il capitolo introduce le problematiche legate alla ricostruzione di
plasmi nelle fasi di inizio e fine scarica ed in presenza di fenomeni veloci che ne modificano la forma. Si descriveranno le modifiche apportate al modello precedentemente presentato per adattarlo
a queste fasi dinamiche di plasma.
6.1
Piccoli Plasmi
Questa sezione descrive due momenti particolari in cui si trova il plasma durante
ciascun impulso. Con l’espressione piccoli plasmi, infatti, si contraddistinguono i
plasmi che si trovano in start-up o nella fase finale della scarica.
Con il termine start-up si intende la fase di generazione e crescita della colonna di
plasma. Poiché le dimensioni di plasma in questa fase sono molto ridotte rispetto alla
fase principale della scarica (detta flat-top), la griglia dei 100 filamenti fino ad ora
utilizzata non è più idonea. La condizione, infatti, che i filamenti di corrente siano
interni alla regione di plasma implica una modifica al modello.
Si ricorda, inoltre, che il modello finora visto ha il limite di richiedere valori di corrente
di plasma inferiori ai -400 kA per riuscire a ricostruire fedelmente il boundary del flusso
103
CAP. 6 RICOSTRUZIONE DI PLASMI PARTICOLARI
magnetico. Questa condizione sulla corrente corrisponde ad attendere, dall’inizio
dell’impulso, un intervallo di tempo che puo’ variare da qualche decina di millisecondi
fino ad 1 secondo. Nei primi istanti della scarica, dunque, il codice descritto non è in
grado di ricostruire la forma di plasma.
Si posso notare i limiti dei codici attuali dalle figure 6.1 a) e b). In particolare, è
stata posta anche la simulazione operata da XLOC. Quest’ultimo non è in grado di
ricostruire il boundary perché un piccolo plasma si trova, in genere, in una zona del
vessel che risente maggiormente delle discontinuità delle cinque regioni. Poiché per
l’impulso considerato, il n◦ 53045, la corrente di plasma assume il valore di soglia in
t = 40.25 sec (vedere figura 5.8), si è scelto per la simulazione l’istante 40.13 sec.
°
°
XLOC n 53045 t= 40.13 sec
M. Filamentare n 53045 t= 40.13 sec
2
2
1.5
1.5
1
1
0.5
0.5
0
0
−0.5
−0.5
−1
−1
−1.5
−1.5
Z [m]
−2
−2
2
3
R [m]
4
2
3
R [m]
4
Figura 6.1: XLOC e Modello Filamentare in t = 40.13 sec. Il boundary in viola è
dato da EFIT. XLOC è intrinsecamente limitato per questa fase di plasma, mentre il
modello filamentare è utilizzato in maniera inappropriata.
L’obiettivo di questo capitolo è, quindi, quello di presentare una modifica al mo-
104
CAP. 6 RICOSTRUZIONE DI PLASMI PARTICOLARI
dello filamentare che permetta di variare i filamenti e di operare anche a correnti
inferiori. Tale modifica sarà altrettanto valida per la fase di termination della scarica,
ossia quella in cui la colonna di plasma si spegne fino ad esaurire il proprio contenuto
energetico. Qualora questa condizione avvenisse in maniera inattesa e brusca, si parla
di disruzione (disruption).
Con il termine disruption si intende un’improvvisa perdita di controllo del plasma.
Infatti, man mano che il plasma diventa più caldo e denso, aumenta la sua instabilità. Quando il plasma entra in un regime instabile, può disrompere, ossia compiere
rapidi cambiamenti nella sua struttura interna e i campi magnetici non sono più in
grado di confinarlo all’interno del vessel. Di conseguenza, la colonna di plasma perde
rapidamente e violentemente la propria energia magnetica e termica sulla struttura
confinante. Le cause che determinano questo rapido movimento possono essere di diverso tipo, molte di queste non sono state del tutto giustificate e sono ancora oggetto
di studio. Sicuramente, la disruption deriva da un qualche fenomeno di instabilità
difficile da prevedere e controllare. I danni che può provocare al macchinario sono
legati essenzialmente al rilascio repentino di una elevata quantità di energia che il
plasma aveva poco prima di disrompere. Infatti, le conseguenze principali sono:
• parti del vessel non opportunamente protette potrebbero venir danneggiate;
• le tiles assorbono una forte emissione con conseguente riscaldamento ed usura
dei materiali;
• la macchina viene sporcata sensibilmente e ciò compromette gli esperimenti
successivi.
La disruption rappresenta, dunque, un’ulteriore fase di interesse che potrebbe essere
affrontata con il modello che si va a descrivere.
105
CAP. 6 RICOSTRUZIONE DI PLASMI PARTICOLARI
6.2
Start-up
Il modello filamentare richiede di essere adattato per rispondere alle seguenti richieste:
1) il numero di momenti ricavati nell’implementazione originale è sovradimensionato
rispetto alle informazioni necessarie;
2) si deve adattare la griglia di filamenti alle dimensioni e alla posizione in cui si trova
il plasma durante lo start-up;
3) anche se si riduce il numero di filamenti, il numero di operazioni eseguite per
ricavare la distribuzione di flusso mediante le Green-Functions è eccessivo e non
risponde alle esigenze real-time del rapido fenomeno in questione.
Il calcolo delle funzioni di Green tra posizione dei filamenti e punti virtuali è l’elemento che maggiormente contribuisce alla complessità computazionale dell’algoritmo
utilizzato. Per rispondere alle specifiche del real-time, è possibile scegliere tra due
diversi approcci:
a) precalcolare tutte le funzioni di Green per una griglia fitta di filamenti fissi e individuare un metodo di selezione di quelli necessari di volta in volta alla ricostruzione;
b) utilizzare un numero molto ridotto di filamenti le cui posizioni siano variabili nel
tempo. Ciò richiederebbe un numero di operazioni ridotto.
Entrambe le metodologie si preoccupano di individuare dove posizionare i filamenti e
come muoverli ad ogni iterazione. La differenza principale consiste nell’avere o meno
una griglia fissa di posizioni. In questo lavoro è stata investigata l’opzione b).
Nonostante la difficoltà legata alla velocità del fenomeno di start-up, è possibile sfruttare alcune proprietà che il plasma possiede in questa fase e che riducono notevolmente
la complessità del problema. In particolare:
106
CAP. 6 RICOSTRUZIONE DI PLASMI PARTICOLARI
1. il plasma tipicamente nasce nella zona in basso e a destra della camera da vuoto,
per cui si riduce la regione nella quale cercare e posizionare i filamenti di plasma
corretti;
2. il plasma è sicuramente in contatto con uno o più punti di questa parte di vessel
poiche’ si trova in configurazione limiter;
3. dall’analisi di un elevato campione di impulsi, si può asserire che in questi
primi istanti il plasma risulta sempre di forma quasi circolare, senza rilevanti
asimmetrie.
Queste osservazioni hanno portato alla seguente metodologia di scelta dei filamenti.
Innanzitutto, va individuato il centroide di corrente per il primo istante. Questa
informazione viene fornita in via approssimata dal codice BetaLi che fa uso di due
opportuni momenti di Shafranov [6]. Si individua il punto di contatto sul vessel
che corrisponde al valore di flusso al boundary calcolato (la relazione è la (2.1.1)).
Grazie all’ipotesi di plasma circolare, se ne identifica il raggio come la distanza tra
il centroide e questo punto di vessel. È ora necessario decidere come posizionare
i filamenti nella zona di plasma in base all’informazione ricavata. Si ricorda che
posizionare due o più filamenti troppo vicini tra loro crea artefatti nella ricostruzione
di campo e flusso, in particolare dovuti agli effetti di alto ordine. Posizionarli, invece,
troppo vicino al boundary determina la non regolarità di quest’ultimo (effetto di
ripple). Un buon compromesso tra queste due situazioni consiste nel porre i filamenti
lungo una corona circolare che si trova al 50% tra boundary e la loro distanza reciproca.
L’informazione sul raggio è quindi sufficiente per stabilire le posizioni. Quanto al
numero, si evidenzierà nei risultati che sono sufficienti pochi filamenti per ottenere un
buon risultato.
107
CAP. 6 RICOSTRUZIONE DI PLASMI PARTICOLARI
Per quanto riguarda i momenti di corrente necessari, la ricostruzione risulta soddisfacente già con un numero pari a 4 o 5. Vista infatti la semplicità di forma del
plasma, non occorrono ordini superiori, i quali considerano configurazioni più articolate di un cerchio o di una ellisse (vedere tabella 4.1 per il significato fisico attribuibile
all’ordine dei momenti). È bene, però, fare attenzione ad avere un numero di filamenti di plasma superiore o al più uguale al numero dei momenti, altrimenti il modello
presenterebbe matrici sotto-dimensionate.
Figura 6.2: Schema a blocchi che implementa il modello di plasma, di ferro e delle coils
poloidali per la fase di start-up. Le matrici di colore grigio sono quelle precalcolate,
le restanti vengono calcolate in real-time.
In analogia con l’analisi fatta in sezione 4.2.3, si presenta ora il modello filamentare modificato e implementato secondo lo schema a blocchi di figura 6.2. Le nuove
impostazioni del codice filamentare sono:
• sensori virtuali, posizione dei filamenti di ferro e modellizzazione dei circuiti PF
108
CAP. 6 RICOSTRUZIONE DI PLASMI PARTICOLARI
invariati rispetto al codice precedente;
• metodo di regolarizzazione e inversione di matrice: TSVD;
• tolleranza della TSVD: 10−5 ;
• metodo dei momenti di corrente centrati nei valori medi delle coordinate radiali
e verticali dei filamenti scelti per il plasma;
• ordine dei momenti m (4, 5, al più 7);
• numero dei filamenti n (2, 3, al più 8);
• posizione dei filamenti: coordinata R pari al valore di RC del centroide, coordinata Z pari a ZC ±
raggio
2
;
• raggio: distanza tra la Rc e la coordinata R del primo punto di contatto del
plasma con il vessel.
Le matrici variabili, perché dipendenti da numero e posizione dei filamenti, sono:
1) Virtual to Moments. Le dimensioni di questa matrice sono: V irtualT oM oments ∈
Rm×1440 , ossia il numero di momenti scelti rispetto alle misure virtuali;
2) Moments to Filaments. Con la tecnica di TSVD si calcola questa matrice a
partire dalla FilamentsToMoments. La dimensione della matrice è: Rn×m ;
3) Filaments to Virtual di dimensioni R2160×n ;
4) Virtual to Filaments di dimensioni Rn×2160 .
Come si può notare dalle dimensioni riportate, l’operazione di inversione per una
matrice Rm×n è poco onerosa e quindi eseguibile in real-time. Anche il calcolo computazionale delle Green-Functions è modesto perchè sono pochi i filamenti scelti.
109
CAP. 6 RICOSTRUZIONE DI PLASMI PARTICOLARI
In base a queste nuove dimensioni, dalla combinazione matriciale di somme e prodotti
espressa nello schema 6.2, si ha la seguente rappresentazione compatta del modello:
MATRIX · INPUT
CORRENTI =
IP LASM A
IF ERRO
IP F
]
MP LASM A [
MF ERRO · m
IP F
MP F
=
(6.2.1)
[(n + 150) × 1] = [(n + 150) × 66] · [66 × 1]
Le differenti dimensioni della matrice a blocchi MATRIX, rispetto alla (4.2.19), sono:
1) MP LASM A è la somma delle matrici che permettono di ricavare IP LASM A e ∆IP LASM A .
La dimensione è Rn×66 ;
2) MF ERRO e MP F mantengono le stesse dimensioni viste.
Come per la fase centrale della scarica, anche per lo start-up è indispensabile considerare i contributi di ferro e dei circuiti PF se si vuole ottenere un’adeguata ricostruzione del flusso esterno al plasma. La figura 6.3 mostra, infatti, quanto contribuisce
la modellizzazione delle strutture di supporto alla mappa di flusso totale.
Mappa isoflusso con 12 filamenti di PLASMA + PF. Confronto tra Modello Filamentare ed EFIT
Mappa isoflusso con 12 filamenti di PLASMA + PF e FERRO. Confronto tra Modello Filamentare e EFIT
2
2
1.5
1.5
1
1
0.5
0.5
0
0
−0.5
−0.5
−1
−1
−1.5
−2
−1.5
1
1.5
2
2.5
PULSE: 53045
3
3.5
TEMPO: 40.6916 [sec]
4
4.5
5
−2
1
1.5
2
2.5
PULSE: 53045
3
3.5
TEMPO: 40.6916 [sec]
4
4.5
5
Figura 6.3: a) Ricostruzione di flusso senza la modellizzazione del ferro. b) Mappa
ottenuta dalla somma dei contributi di plasma, coils polidali e ferro.
110
CAP. 6 RICOSTRUZIONE DI PLASMI PARTICOLARI
6.3
Simulazioni e risultati
Il confronto che si riporta è tra la ricostruzione filamentare del Plasma Operation
Department e quella del gruppo di ricerca “CREATE” dell’Università di Napoli. Gli
errori al boundary che verranno presentati sono dati dal fatto che quest’ultimo codice,
denominato MSWTOOL [30], comprende una modellizzazione più accurata del ferro.
Essa tiene conto del livello di saturazione nel quale si trovano le componenti attive
della macchina man mano che il plasma cambia le proprie proprietà elettromagnetiche durante la scarica. Ciò è possibile in quanto l’implementazione non real-time
di MSWTOOL permette di non trascurare i fenomeni fisici legati alle proprietà dei
materiali coinvolti.
I filamenti scelti dal Create sono disposti lungo una corona circolare interna al plasma
e sono di qualche decina. Il modello filamentare implementato in questa sezione ottiene risultati soddisfacenti, rispetto all’MSWTOOL, già con l’utilizzo di 4 o 8 filamenti.
Gli errori commessi nel punto di RIG dai due modelli sono riportati nella tabella 6.1,
nella quale si evidenzia il progressivo aumento degli errori con il trascorrere del tempo.
Il plasma, infatti, aumenta le proprie dimensioni e il modello filamentare ridotto non
è in grado di ricostruire fedelmente il suo boundary.
Istante di
tempo [sec]
40.35
40.45
40.55
40.65
40.75
40.85
ERRORI AL RIG [cm]
4 Filamenti 8 Filamenti
3.5
3
2
0.5
< 0.5
1.2
< 0.1
1.8
1.5
<3
2
3
Tabella 6.1: Valori numerici degli errori di RIG tra la ricostruzione filamentare del
CREATE e quella del JET, per i primi istanti di start-up. L’impulso è il n◦ 70699.
111
CAP. 6 RICOSTRUZIONE DI PLASMI PARTICOLARI
Corrente I = −325276.9375 A
Corrente I p = −376162.2188 A
p
P.O.D.
CREATE
EFIT
2
P.O.D.
CREATE
EFIT
2
1.5
1.5
1
1
0.5
0.5
Z [m]
Z [m]
0
0
−0.5
−0.5
−1
−1
−1.5
−1.5
−2
−2
0.5
1
1.5
2
2.5
3
3.5
PULSE: 70699 TEMPO: 40.35 [sec]
4
4.5
5
5.5
(a) L’istante di tempo è t = 40.35 sec.
0.5
1
1.5
2
2.5
3
3.5
PULSE: 70699 TEMPO: 40.45 [sec]
4
4.5
5
5.5
(b) L’istante di tempo è t = 40.45 sec.
Corrente I p = −425056.1875 A
Corrente I p = −476339.7188 A
P.O.D.
CREATE
EFIT
2
P.O.D.
CREATE
EFIT
2
1.5
1.5
1
1
0.5
0.5
Z [m]
Z [m]
0
0
−0.5
−0.5
−1
−1
−1.5
−1.5
−2
0.5
1
1.5
2
2.5
3
3.5
PULSE: 70699 TEMPO: 40.55 [sec]
4
4.5
5
−2
5.5
(c) L’istante di tempo è t = 40.55 sec.
0.5
1
1.5
2
2.5
3
3.5
PULSE: 70699 TEMPO: 40.65 [sec]
4
4.5
5
5.5
(d) L’istante di tempo è t = 40.65 sec.
Corrente I p = −528971.1875 A
Corrente I p = −566744.5625 A
P.O.D.
CREATE
EFIT
2
P.O.D.
CREATE
EFIT
2
1.5
1.5
1
1
0.5
0.5
Z [m]
Z [m]
0
0
−0.5
−0.5
−1
−1
−1.5
−1.5
−2
0.5
1
1.5
2
2.5
3
3.5
PULSE: 70699 TEMPO: 40.75 [sec]
4
4.5
5
(e) L’istante di tempo è t = 40.75 sec.
5.5
−2
0.5
1
1.5
2
2.5
3
3.5
PULSE: 70699 TEMPO: 40.85 [sec]
4
4.5
5
5.5
(f) L’istante di tempo è t = 40.85 sec.
Figura 6.4: Confronto tra modello filamentare del Plasma Operation Department
(P.O.D. nelle legende) e del CREATE per l’impulso n◦ 70699. Il numero di filamenti
è 4, i momenti sono 3. È presente anche la ricostruzione magnetica operata da EFIT,
sebbene il codice non sia completamente attendibile per questi istanti di tempo.
112
CAP. 6 RICOSTRUZIONE DI PLASMI PARTICOLARI
Corrente I p = −325276.9375 A
Corrente I p = −376162.2188 A
P.O.D.
CREATE
EFIT
2
P.O.D.
CREATE
EFIT
2
1.5
1.5
1
1
0.5
0.5
Z [m]
Z [m]
0
0
−0.5
−0.5
−1
−1
−1.5
−1.5
−2
0.5
1
1.5
2
2.5
3
3.5
PULSE: 70699 TEMPO: 40.35 [sec]
4
4.5
5
−2
5.5
(a) L’istante di tempo è t = 40.35 sec.
0.5
1
1.5
2
2.5
3
3.5
PULSE: 70699 TEMPO: 40.45 [sec]
4
4.5
5
5.5
(b) L’istante di tempo è t = 40.45 sec.
Corrente I p = −425056.1875 A
Corrente I p = −476339.7188 A
P.O.D.
CREATE
EFIT
2
P.O.D.
CREATE
EFIT
2
1.5
1.5
1
1
0.5
0.5
Z [m]
Z [m]
0
0
−0.5
−0.5
−1
−1
−1.5
−1.5
−2
0.5
1
1.5
2
2.5
3
3.5
PULSE: 70699 TEMPO: 40.55 [sec]
4
4.5
5
−2
5.5
(c) L’istante di tempo è t = 40.55 sec.
0.5
1
1.5
2
2.5
3
3.5
PULSE: 70699 TEMPO: 40.65 [sec]
4
4.5
5
5.5
(d) L’istante di tempo è t = 40.65 sec.
Corrente I p = −528971.1875 A
Corrente I p = −566744.5625 A
P.O.D.
CREATE
EFIT
2
P.O.D.
CREATE
EFIT
2
1.5
1.5
1
1
0.5
0.5
Z [m]
Z [m]
0
0
−0.5
−0.5
−1
−1
−1.5
−1.5
−2
0.5
1
1.5
2
2.5
3
3.5
PULSE: 70699 TEMPO: 40.75 [sec]
4
4.5
5
(e) L’istante di tempo è t = 40.75 sec.
5.5
−2
0.5
1
1.5
2
2.5
3
3.5
PULSE: 70699 TEMPO: 40.85 [sec]
4
4.5
5
5.5
(f) L’istante di tempo è t = 40.85 sec.
Figura 6.5: Confronto tra modello filamentare del CREATE e modello filamentare del
Plasma Operation Department per l’impulso n◦ 70699. Il numero di filamenti è 8, il
numero dei momenti di corrente è 7.
113
CAP. 6 RICOSTRUZIONE DI PLASMI PARTICOLARI
Per istanti di tempo precedenti a quelli mostrati, occorre ridurre il numero di
filamenti e di momenti. Infatti, vista l’ulteriore semplicità della forma e le ridotte
dimensioni, non occorrono più di 2 filamenti e 2 momenti.
Corrente I p = −0.27629 MA
Corrente I p = −0.24052 MA
P.O.D.
CREATE
EFIT
2
P.O.D.
CREATE
EFIT
2
1.5
1.5
1
1
0.5
0.5
Z [m]
Z [m]
0
0
−0.5
−0.5
−1
−1
−1.5
−1.5
−2
0.5
1
1.5
2
2.5
3
3.5
PULSE: 70699 TEMPO: 40.15 [sec]
4
4.5
5
(a) L’istante di tempo è t = 40.15 sec.
5.5
−2
0.5
1
1.5
2
2.5
3
3.5
PULSE: 70699 TEMPO: 40.25 [sec]
4
4.5
5
5.5
(b) L’istante di tempo è t = 40.25 sec.
Figura 6.6: Confronto Plasma Operation Department, CREATE ed EFIT per istanti
di tempo con corrente di plasma molto bassa. Nonostante gli errori per le differenti modellizzazioni, la ricostruzione dei tre codici è, nel complesso, paragonabile e
accettabile.
Come ultimo risultato, si presentano una serie di grafici che dimostrano il possibile
utilizzo del modello filamentare ridotto per ricostruire plasmi di forma relativamente
semplice anche per istanti successivi lo start-up. La figura 6.7 presenta i boundary
ricostruiti da EFIT e dal modello filamentare ridotto per l’impulso n◦ 70418 nell’intervallo di tempo che va dai 40.06 ai 43.06 secondi con tempo di campionamento pari
a 0.25 sec. In tutte le figure sono stati disegnati i 4 filamenti utilizzati e il centroide, le
cui posizioni variano in base alle dimensioni del plasma secondo il criterio già discusso. Ciò serve per sottolineare come il modello filamentare sia in grado di passare dai
fenomeni di ripple intorno ai filamenti (in t = 40.06 sec) ad una buona ricostruzione
topologica, nonostante il plasma assuma grandi dimensioni (si mantiene in limiter fino
a toccare la parte interna del vessel).
114
CAP. 6 RICOSTRUZIONE DI PLASMI PARTICOLARI
Corrente I p = −214323.2031 A
2
Corrente I p = −614016.8125 A
2
M.Filamentare
EFIT
1.5
Corrente I p = −734577.25 A
2
M.Filamentare
EFIT
1.5
1
1
1
0.5
0.5
0.5
Z [m]
Z [m]
Z [m]
0
0
0
−0.5
−0.5
−0.5
−1
−1
−1
−1.5
−1.5
−1.5
−2
1
2
3
4
PULSE: 70418 TEMPO: 40.06 [sec]
−2
5
1
Corrente I p = −822581.8125 A
2
2
3
4
PULSE: 70418 TEMPO: 40.31 [sec]
−2
5
1
1
0.5
0.5
Z [m]
Z [m]
0
0
0
−0.5
−0.5
−0.5
−1
−1
−1
−1.5
−1.5
−1.5
−2
5
1
Corrente I p = −920706.6875 A
2
2
3
4
PULSE: 70418 TEMPO: 41.06 [sec]
−2
5
1
1
0.5
0.5
Z [m]
Z [m]
0
0
0
−0.5
−0.5
−0.5
−1
−1
−1
−1.5
−1.5
−1.5
−2
5
1
Corrente I p = −1102385.625 A
2
2
3
4
PULSE: 70418 TEMPO: 41.81 [sec]
−2
5
1
1
0.5
0.5
Z [m]
Z [m]
0
0
0
−0.5
−0.5
−0.5
−1
−1
−1
−1.5
−1.5
−1.5
5
M.Filamentare
EFIT
1.5
1
2
3
4
PULSE: 70418 TEMPO: 42.31 [sec]
5
Corrente I p = −1346981.5 A
0.5
Z [m]
2
3
4
PULSE: 70418 TEMPO: 42.06 [sec]
2
M.Filamentare
EFIT
1.5
1
1
Corrente I p = −1190359.625 A
2
M.Filamentare
EFIT
1.5
−2
M.Filamentare
EFIT
1.5
1
2
3
4
PULSE: 70418 TEMPO: 41.56 [sec]
5
Corrente I p = −993012.4375 A
0.5
Z [m]
2
3
4
PULSE: 70418 TEMPO: 41.31 [sec]
2
M.Filamentare
EFIT
1.5
1
1
Corrente I p = −934606.9375 A
2
M.Filamentare
EFIT
1.5
−2
M.Filamentare
EFIT
1.5
1
2
3
4
PULSE: 70418 TEMPO: 40.81 [sec]
5
Corrente I p = −894582.75 A
0.5
Z [m]
2
3
4
PULSE: 70418 TEMPO: 40.56 [sec]
2
M.Filamentare
EFIT
1.5
1
1
Corrente I p = −855747.3125 A
2
M.Filamentare
EFIT
1.5
−2
M.Filamentare
EFIT
1.5
−2
1
2
3
4
PULSE: 70418 TEMPO: 42.56 [sec]
5
−2
1
2
3
4
PULSE: 70418 TEMPO: 43.06 [sec]
5
Figura 6.7: Evoluzione temporale del boundary di EFIT e del modello filamentare
ridotto per lo shot n◦ 70418 nell’intervallo di scarica [40.06 ÷ 43.06] secondi. Il
numero di filamenti è 4, il numero dei momenti di corrente è 3.
115
Capitolo 7
CONCLUSIONI E SVILUPPI
FUTURI
Lo stage semestrale, finanziato dal programma europeo “Leonardo” e finalizzato allo
svolgimento di tesi presso il centro ricerche JET di Culham, ha avuto i seguenti
obiettivi:
• validare l’approccio filamentare per la ricostruzione del boundary di plasma;
• evidenziare i miglioramenti che si possono conseguire con questa modellazione rispetto a quella attualmente utilizzata dal dipartimento responsabile del
controllo del JET;
• investigare sulle possibili fasi di plasma nelle quali il modello filamentare è in
grado di ottenere risultati utili e attendibili.
Uno sviluppo futuro prevede di impostare FELIX in maniera che riesca ad inseguire,
dinamicamente, la forma e la posizione di plasma con il modello filamentare ridotto
e quello completo. Si può pensare, infatti, di implementare una procedura che ricostruisca la fase di start-up con un numero sufficientemente basso di filamenti finché
la grandezza della colonna di plasma non richieda di applicare il modello esteso, per
poi tornare ad una semplificazione del modello nella fase di terminazione (con o senza
116
CAP. 7 CONCLUSIONI E SVILUPPI FUTURI
disruption). L’inseguimento dell’evoluzione temporale del plasma sarebbe così completo e autonomo per tutta la durata dell’esperimento.
Dai risultati del capitolo 5 e 6 si può concludere che molti vantaggi verrebbero apportati se venisse sostituita la modellizzazione polinomiale con quella filamentare.
Si ricorda, inoltre, che le considerazioni fatte riguardano nello specifico il JET ma
potrebbero essere facilmente estese a qualsiasi macchina da fusione sparsa nel mondo,
grazie alla configurabilità dei codici visti.
Ad esempio, un progetto concreto che muove i passi da questa tesi è quello che si sta
delineando presso i laboratori del tokamak FTU dell’ENEA-Frascati. Sotto il suggerimento e la supervisione del prof. Zaccarian, infatti, si stanno valutando diverse idee
per una concreta collaborazione con gli ingegneri del JET.
L’interesse è principalmente orientato ad:
• individuare un sistema dinamico in grado di scegliere numero e posizioni dei
filamenti utili alla ricostruzione del boundary per ogni passo di campionamento;
• utilizzare una serie di calcolatori, posti in parallelo, per la risoluzione delle Green
Functions relative ai filamenti scelti;
• applicare il modello filamentare ridotto e completo al tokamak FTU.
Il macchinario italiano, infatti, offre il vantaggio di generare un plasma piuttosto regolare, circolare e di dimensioni ridotte. L’assenza dell’X-Point, inoltre, determina
un’ulteriore semplificazione per investigare le fasi aventi una dinamica molto veloce.
FTU, sotto questo aspetto, potrebbe rappresentare un valido tokamak su cui sviluppare e testare le idee che si vogliono applicare nel prossimo futuro al JET.
117
Appendici
118
Appendice A
XLOC: modello numerico
In questa appendice si riporta nel dettaglio il modello implementato nel codice XLOC.
Si utilizza la seguente espressione della serie di Taylor per esprimere le misure dei
sensori presenti intorno al vessel:
Ψ(ρ, z) =
∑
ai,j ρi z j
(A.1)
0≤i+j≤n
Sebbene il codice implementato utilizzi l’ordine n pari a 6, in questa appendice si
è scelto di ridurre le dimensioni delle variabili in gioco per facilitare il lettore nei
passaggi numerici.
Con la scelta di n = 3 ⇒ (i + j) ≤ 3, l’equazione (A.1) si espande in:
Ψ(ρ, z) = a00 +a10 ρ+a01 z+a20 ρ2 +a11 ρz+a02 z 2 +a30 ρ3 +a21 ρ2 z+a12 ρz 2 +a03 z 3 (A.2)
Il numero di elementi che devono costituire la base di funzioni polinomiali da scegliere
è ricavato da:
N=
(ordine + 1) · (ordine + 2)
4·5
=
= 10
2
2
Si definisce ora la base suddetta in termini di potenze delle coordinate (ρ, z):
}T
{
F10 = 1, ρ, z, ρ2 , ρz, z 2 , ρ3 , ρ2 z, ρz 2 , z 3
(A.3)
119
APP. A XLOC: modello numerico
Ordine
1
3
2
3
Sequenza
1
ρ
ρ
ρ3
z
2
z2
ρz
ρ2 z
ρz 2
z3
Combinazione
1
2
3
4
La sequenza scelta per la (A.3) deriva dal triangolo di Pascal ora presentato.
Il modello polinomiale può essere scritto in forma matriciale:
Ψ(ρ, z) = F10 (ρ, z)T · a
(A.4)
con a il vettore dei coefficienti incogniti ottenuti dall’elaborazione delle misure magnetiche.
Dopo il cambio di variabile (r → ρ) con il quale si può ottenere una migliore normalizzazione dei polinomi utilizzati, l’operatore di Grad-Shafranov visto in (3.1.17) può
essere riscritto nella seguente forma:
∆∗ Ψ = 4(ρ + r02 )
∂ 2Ψ ∂ 2Ψ
+
∂ρ2
∂z 2
(A.5)
L’equazione del flusso viene ora vincolata a soddisfare la condizione di vuoto: si
applica l’operatore differenziale ∆∗ ad entrambi i membri dell’equazione (A.4) e si
uguaglia a zero in virtù della relazione del vuoto.
(
)
∆∗ Ψ = ∆∗ F10 (ρ, z)T · a
= 4(ρ + r02 )(2a20 + 6a30 ρ + 2a21 z) + 2a02 + 2a12 ρ + 6a03 z
= 4a20 ρ + 12a30 ρ2 + 4a21 ρz + 4a20 r02 + 12a30 r02 + 4a21 r02 z + a02 + a12 ρ + 3a03 z
= 0
(A.6)
120
APP. A XLOC: modello numerico
In forma matriciale ciò si scrive:
T
4r02
1
ρ
4
z
2
ρ
ρz
2 ·
z
3
ρ
ρ2 z
ρz 2
z3
1 12r02
1
4r02
12
4
a00
1 a10
a01
3
a20
a11
· =0
a02
a30
a21
a12
a03
Da cui si ricava:
∆∗ Ψ = F10 (ρ, z)T · L∗ (r0 , z0 ) · a = 0
⇒ L∗ (r0 , z0 ) · a = {00...0}T
∀ρ, z
(A.7)
dove L∗ esprime i vincoli lineari dipendenti dalla scelta del centro di espansione (r0 , z0 ).
Si definisce CtoA la matrice di tutti i vettori nel kernel di L∗ , così che L∗ · CtoA = 0.
In tal modo, le colonne di CtoA possono essere usate per definire una nuova base di
polinomi Gridotto = CtoAT · F10 , la cui grandezza è così ricavata:
N ridotto =
3·4
ordine · (ordine + 1)
−1=
−1=5
2
2
Nell’esempio in esame, la base G5 è così costituita:
1
ρ
T
T
z
[G] = F10 · CtoA =
2
ρ − 4r02 z 2 − 4ρz 2
ρz
→ G1
→ G2
→ G3
→ G4
→ G5
Il flusso può essere ora calcolato usando la seguente espressione:
Ψ(ρ, z) = G5 (ρ, z)T · c
(A.8)
= F10 (ρ, z)T · CtoA · c
⇒ a = CtoA · c
121
APP. A XLOC: modello numerico
dove c è un vettore di coefficienti ottenuto dal best fit pesato delle misure rispetto alla
base di funzioni individuata:
errore =
∑
wj (mj − m̂j )2 +
∑
wk (Ψ̂r1 (k) (Pk ) − Ψ̂r2 (k) (Pk ))2
(A.9)
dove:
• m è una misura di flusso, campo o della differenza di flusso tra due punti;
• m̂ è la sua ricostruzione;
• w sono opportuni pesi;
• P è la posizione dei “soft tie points”;
• Ψ̂r1 (k) è la funzione polinomiale (A.8) della k-esima regione in un lato del “tie
point”;
• Ψ̂r2 (k) è la funzione polinomiale (A.8) della regione adiacente nello stesso “tie
point”.
Per ricostruire la misura di flusso in una posizione di P basta calcolare il vettore di
costanti g = G5 (P ) ed eseguirne il prodotto scalare gT ·c. In generale si può utilizzare
la matrice CtoMeasure contenenti i coefficienti gi relativi alle varie misure per le 5
regioni di interesse:
m̂ = CtoMeasure · c
∀ regione
(A.10)
Ora non resta che operare l’inversione della relazione (A.10) e ottenere così il vettore
dei coefficienti da inserire in (A.8). XLOC a questo punto utilizza le condizioni aggiuntive degli hard e soft points per ridurre i gradi di libertà della matrice CtoMeasure.
Questi vincoli restrittivi sono nella forma:
Htie
points
· c = 0,
ossia
ΨHP (i) − ΨHP (i+1) = 0
(A.11)
122
APP. A XLOC: modello numerico
Una volta eseguita l’inversione (diretta o tramite pseudo-inversa) si può scrivere:
c = CtoMeasure† · m̂
= T · m̂
(A.12)
L’espressione finale che permette di ricavare il flusso con un vettore di misure in
ingresso è:
Ψ(ρ, z) =
5
∑
Gi (ρ, z) · c
i=1
=P ·c
(A.13)
= P · T · m̂
Il campo magnetico poloidale può essere espresso in maniera analoga:
Br (ρ, z) =
5
∑
Hri (ρ, z) · c
Bz (ρ, z) =
i=1
5
∑
Hzi (ρ, z) · c
i=1
I coefficienti di queste matrici sono ricavate dai coefficienti della matrice di flusso
utilizzando le seguenti relazioni differenziali:
hri = −
1 ∂gi
r ∂z
hzi =
1 ∂gi
r ∂r
¥
123
Appendice B
Implementazione in real-time
Questa appendice presenta il software FELIX dal punto di vista
implementativo. Spiega il nuovo approccio utilizzato per configurare
ed eseguire questo tool in real-time.
Database di FELIX
L’idea di sviluppare un software indipendente dalle specifiche della macchina e facilmente modificabile per risolvere il problema della ricostruzione magnetica ha dato
esito, negli ultimi anni, ad un set di database gerarchici implementati su file e dalla
sintassi estremamente user-friendly (vedere anche [31]). Dal punto di vista computazionale, FELIX è, infatti, un’applicazione configurabile tramite la modifica di semplici
script denominati Configuration Databases. Ciascun database è concepito come
un contenitore di oggetti. Ogni sub-database, infatti, è la radice di un sotto-albero,
le cui foglie sono i parametri di ciascun elemento. Gli oggetti possono riferirsi a parti
fisiche del tokamak o descrivere proprietà astratte come i momenti di campo.
L’obiettivo che deve essere eseguito da FELIX è completamente determinato dalle
informazioni contenute in questi databases, distinti in MCF, PCF, TCF.
124
APP. B Implementazione in real-time
Machine Configuration File
Il file MCF descrive le geometrie degli elementi del macchinario dal punto di vista
magnetico. Contiene le informazioni su come viene fornita la potenza, su come sono
connesse le coils e i componenti esterni per formare i vari circuiti elettrici. Inoltre,
presenta i differenti modelli sviluppati per risolvere il problema magnetico in questione. Ad esempio, vi possono essere differenti boundary reconstruction code o differenti
equilibrium reconstruction code.
Le informazioni contenute in questo database sono schematizzate in figura B.1:
RList
P3MU
ZList
Coil = AC04
D1
Figura B.1: Struttura ad albero di un MCF con un esempio di ramo e foglie.
1) Signals: elenco degli input e output del modello;
2) Circuits: la connessione in serie e/o parallelo tra gli elementi bipolari elettrici di
un tokamak forma i circuiti. Un circuito è definito da un proprio nome e dalla lista
dei nomi dei propri componenti. La matrice a 2 righe “Connections” determina la
modalità di collegamento dei terminali di ciascun bipolo rispetto agli altri.
Per chiarezza, si riporta l’esempio del circuito poloidale SHAPE, sia con il listato
di configurazione che con la figura corrispondente:
125
APP. B Implementazione in real-time
Circuits = {
Shape =
{
Components
Connections
0
1
=
=
=
=
{ISHP P2SUI P2SUE P3SU P3SL P2SLE P2SLI}
{
{0 0 1 3 4 4 5}
{6 1 2 2 3 5 6}
}
}
}
Figura B.2: Generatore di corrente e coils che costituiscono il circuito di Shape.
3) Geometry: elementi e strutture della macchina con relative tipologie, misure,
distanze, posizioni. Si riporta l’esempio della coil P3MU, corrsipondente anche
alla struttura di figura B.1:
Geometry = {
P3MU = {
RList = { 3 . 8 2 7
ZList = {3.107
AC04 = {
Type
=
Width =
Height =
NTurns =
}
}
}
3.863}
3.107}
PolyTurn
0.036
0.082
2
126
APP. B Implementazione in real-time
4) Elements: blocchi elementari che cosituiscono un circuito. Sono generatori di
corrente e/o tensione, resistori, induttori, coils, etc..;
5) Plasma: misure della dimensione e posizione del plasma in relazione alla prima
parete del vessel. Questa parte di codice si basa sulla mappa di flusso globale del
tokamak, computata dalle sezioni Circuits e Geometry.
Gli oggetti che fanno parte di questa sezione sono: Limiter e flux-point, X-Point
nell’area di ricerca del piano poloidale, Probe (calcolo del flusso o campo in un
dato insieme di posizioni), Saddle (calcolo del flusso per una saddle-coil), Gaps,
Boundary Path, Strike Point.
La sequenza di esecuzione è essenziale perché alcuni di questi oggetti possono aver
bisogno delle uscite degli oggetti precedenti.
Program Configuration File
Il file PCF contiene istruzioni necessarie per evitare di scrivere differente codice per
ogni applicazione. Con la configurazione del PCF, l’utente sceglie con quale input
controlla il sistema, se il plasma è presente o meno, quale modello vuole utilizzare per
la sua rappresentazione, quali strutture passive considerare, quale modello di circuito
adottare, quali risultati generare, etc. Alcune informazioni possono essere le stesse
dell’MCF, sostituite o aggiunte. Le sezioni che costituiscono questo database sono:
1) CodeInputs: definisce gli input che verranno forniti al codice;
2) CodeOutputs: scelta per le uscite delle correnti, tensioni, flusso, campo, gaps;
3) Components: lista degli elementi dei Circuits e del Plasma dell’MCF che devono
essere implementati e simulati da Felix;
127
APP. B Implementazione in real-time
4) Link: quando un segnale è allo stesso tempo uscita di un procedimento e ingresso
di un altro si chiama link ;
5) Signals: inputs, outputs e link.
Transitional Configuration File
Il file TCF contiene i risultati delle analisi e degli algoritmi di ottimizzazione in una
forma che semplifica l’implementazione del codice real-time. Per questo database è
necessario anche qualche informazione derivante dall’MCF e PCF.
Le sezioni che costituiscono questo database sono le seguenti:
1) Checks: prima di eseguire il codice e relativi calcoli, Felix deve verificare se
gli input sono all’interno di un certo range ammissibile, altrimenti interrompe
l’esecuzione successiva con un errore;
2) Dynamic: descrive i calcoli necessari a computare le correnti passive nel vessel e
a simulare l’evoluzione delle correnti nei circuiti;
3) Coefficients: descrive i coefficienti necessari per calcolare le funzioni di flusso e
campo magnetico;
4) Base: descrive la base della mappa di flusso e consente di scegliere la modellizzazione di XLOC o del modello filamentare, differenziandosi in:
- Base Polinomiale: contiene le coordinate del centro dell’espansione e il vettore
di pesi ordinato in base ad una data sequenza di potenze (Appendice A);
- Base Filamentare: contiene due liste delle coordinate di ciascun filamento
utilizzato e un vettore di pesi, come si evidenzia per la coil poloidale P3MU:
128
APP. B Implementazione in real-time
Base = {
PF_P3MU = {
Type
RList
ZList
Weigths
}
}
=
=
=
=
Filamentary
{3.827 3.863}
{3.107 3.107}
{1
1
}
5) Regions: è la lista delle differenti basi da utilizzare in ciascuna regione del piano
poloidale. L’area della regione è data da tutti i punti più vicini al suo centro.
I segnali che devono essere utilizzati come pesi per gli elementi della base sono
elencati nel vettore InputMap.
Per XLOC si riporta l’esempio della regione 0, costituita dalla base polinomiale
P0 e dalle 4 basi filamentari dedicate ai divertori (F7, F8, F9, F10):
Regions = {
0
=
{
RCentre
ZCentre
Base
InputMap
P0
=
=
=
=
=
2.67500
−1.60000
{ P0 F7 F8 F9 F10 }
{
{ felixCCoeff00 felixCCoeff01
felixCCoeff03 felixCCoeff04
felixCCoeff06 felixCCoeff07
felixCCoeff09 felixCCoeff10
felixCCoeff12 }
F7 = ID1
F8 = ID2
F9 = ID3
F10 = ID4
}
}
}
felixCCoeff02
felixCCoeff05
felixCCoeff08
felixCCoeff11
Per il modello filamentare, invece, si ha un’unica regione costituita da 100 basi
filamentari per il plasma, 140 per il ferro e 22 per ciascuna parte nelle quali vengono
129
APP. B Implementazione in real-time
scomposte le bobine poloidali. L’InputMap è dato dalle 100 correnti che scorrono
nei filamenti di plasma, 140 in quelli di ferro e 10 per i circuiti di PF.
6) Plasma, CodeInputs, CodeOutputs, Link, Signals: stesse sezioni del PCF.
Programmi di Felix
Lo schema B.3 mostra i link tra i tre file di configurazione descritti. Dall’MCF (descrizione della macchina) e PCF (scelta tra i differenti modelli e soluzioni nell’MCF),
applicando un’ottimizzazione, il TCF viene preparato per essere caricato ed eseguito dai programmi real-time o off-line di FELIX. Ognuno di questi algoritmi, GAM,
sono scritti in C++, possono essere compilati ed eseguiti allo stesso modo su diverse
piattaforme (Windows, Linux, Solaris, VxWorks).
Figura B.3: Connessioni tra MCF, PCF e TCF.
FELIX-RT
L’algoritmo di real time, FELIX-RT, contiene il numero minimo di operazioni necessarie per creare il codice di uscita da ogni vettore di dati in ingresso. Tutti i parametri
utilizzati nei calcoli sono stati elaborati da algoritmi di pre-processamento e scritti
nel TCF. Il codice è in grado di interpretare il TCF e costruire tutti gli oggetti in esso
contenuti. Questo codice viene anche utilizzato per processare i dati dopo l’impulso.
130
APP. B Implementazione in real-time
Il codice è sostanzialmente suddiviso in due parti che vengono eseguite in sequenza.
La prima, Magnetic Model, computa la mappa di flusso, mentre la seconda, Plasma
Topology, calcola la geometria del plasma dall’ultima superficie chiusa di flusso. Inoltre, ci sono condizioni sulla validità del modello adottato per la mappa di flusso. Ad
esempio, il centro del plasma deve essere all’interno di una certa area, la corrente di
plasma dovrebbe essere superiore ad una certa soglia. Questi valori sono specificati
nel TCF come checks, prima di ogni iterazione.
Mappa di flusso o di campo. Molti degli oggetti presenti nella sezione Plasma
richiedono di calcolare il flusso o il campo magnetico su un gran numero di punti.
Questo processo è accelerato dal decomporre il campo in un certo numero di vettori e
dal procurare i pesi per questi vettori come uscita della sezione Coefficients. La maggior parte della complessità computazionale è data dal calcolo di questi vettori nelle
posizioni desiderate del piano poloidale. Questo task è eseguito solo una volta dalla
routine di inizializzazione di FELIX-RT, la quale processa prima le sezioni Regions
e Bases e poi fornisce i vettori pre-calcolati in ogni punto del piano richiesto dagli
oggetti di Geometry.
FELIX-OPT
La matrice per le simulazioni delle uscite delle sonde o dei circuiti sono fornite dal
programma FELIX-OPT nella sezione Outputs del TCF.
I modelli descritti nell’MCF, infatti, non possono essere utilizzati direttamente nelle
elaborazioni real-time. Le matrici relative sia ai calcoli magnetici sia alla geometria
del plasma sono ottenute, quindi, dopo un processo di ottimizzazione eseguito da questo software.
131
APP. B Implementazione in real-time
Figura B.4: Processo non real-time di Felix: vengono letti e ottimizzati i modelli che
saranno utilizzati dalla parte real-time di codice.
Questa è la sequenza di azioni che viene eseguita da FELIX-OPT:
• apre i database MCF e PCF;
• legge i componenti presenti dal PCF;
• legge gli input, output e link dal PCF e crea la lista dei segnali;
• legge i segnali, circuiti, elementi e geometria dall’MCF, crea le matrici dei circuiti
e identifica le coil attive;
• mette in ordine i calcoli da eseguire;
• riduce le matrici dei circuiti rimuovendo le evoluzioni troppo veloci o gli stati
non osservabili;
• crea la base per ciascuna regione e le ottimizza tramite la SVD;
• scrive nel TCF le sezioni relative alle basi, regioni, checks, dynamic, coefficients
e i soli output necessari.
• copia le sezioni relative al plasma e ai segnali.
Algoritmi di creazione del modello
I modelli di plasma, ferro e delle strutture passive contenuti nell’MCF sono approssimazioni linearizzate. In base alla disponibilità di sensori o alle configurazioni di
132
APP. B Implementazione in real-time
plasma, differenti modelli possono dare risultati migliori. Qualcuno produce risultati
più accurati in circostanze particolari, altri sono più robusti e validi. Questi modelli
non sono ottenuti direttamente dalle dimensioni della macchina ma usano informazioni aggiuntive come, per esempio, i dati dell’equilibrio immagazzinati in un database
di esperimenti.
Figura B.5: Il sistema che crea il modello utilizza l’MCF con informazioni ulteriori
derivanti da altri database. Termina il proprio task dopo aver aggiunto un nuovo
modello all’MCF stesso.
Documentazione GAM
Tutti i segnali, come input, output e dati intermedi, sono registrati in un Dynamic
Data Buffer (DDB) a cui hanno accesso tutti i codici tramite applicazioni real-time
denominate Generic Application Module (GAM). Ogni GAM è inserita nella catena
esecutiva dopo appositi test che ne riducono la possibilità di errore e, di conseguenza, il
tempo di debug. Inoltre, poiché ogni GAM lavora utilizzando un file di configurazione,
ogni cambiamento non implica la ricompilazione dell’intera applicazione.
In questa sezione si parla, nel dettaglio, delle GAM principali che sono state utilizzate
per far girare il modello filamentare al JET e ottenere i risultati proposti nei capitoli
precedenti.
Il file di configurazione principale, “Master.cfg”, è qui riportato:
133
APP. B Implementazione in real-time
SimulatorInputs = {
TimeBase
= {CFG = TimeGenerator . c f g }
DataLoader = {CFG = RTDNIO_Z. c f g }
}
RealTime = {
F e l i x = {CFG = Model . c f g }
}
SimulatorOutputs = {
Output = {CFG = Out . c f g }
}
Si possono distinguere 3 parti principali: quella relativa agli ingressi, quella al realtime e quella per le uscite. La prima si interessa della configurazione della base dei
tempi e del caricamento dei segnali necessari; la seconda descrive la modellizzazione
del plasma adottata; la terza determina le variabili di uscita.
Si riporta, ora, la descrizione delle GAM corrispondenti.
BaselineSimGAM
Questa GAM fornisce il riferimento alla base dei tempi, il numero di impulso provato
o una lista di impulsi per iterazioni multiple. Di default, i nomi dei segnali inseriti
nel DDB sono:
• GLOBALTIME: tempo in secondi;
• TIMECOUNTER: contatore degli step eseguiti;
• UsecTime: tempo in microsecondi;
• PULSE: numero di scarica.
Le opzioni che si possono impostare sono:
• Tstart: istante iniziale dell’elaborazione o una lista di istanti;
134
APP. B Implementazione in real-time
• Tend: istante finale dell’elaborazione;
• Tstep: permette di scegliere una lista di tempi (anche non consecutivi) che
devono essere prodotti;
• FileCFG: nome di un file da inserire;
• Console: permette di attivare l’uscita su un video;
• Logger: permette di attivare l’uscita su un logger.
Esempio di “TimeGenerator.cfg”:
DLLName = BaselineSimGAM
T s t a r t = 40
Tend
= 80
// Tstep = { 5 2 . 3 9 5 5 . 7 7 6 4 . 3 5 }
Freq
= 100
// [ Hz ]
PulseNumber = {52014 49790 49165 49790 49935 50000 50039}
Console = On
Logger = O f f
Questa GAM imposta un intervallo di tempo che va dai 40 agli 80 secondi con passo
di campionamento pari a 10 ms. Gli impulsi scelti sono nella lista corrispondente e i
risultati vengono stampati sulla console.
LoadData
Questa GAM fornisce la struttura dati input/output utilizzata dalle varie applicazioni
di FELIX. Può caricare dati sia dal JPF che da file di testo. La lista dei pacchetti e le
loro strutture sono immagazzinate nel file RTDNIO_Z.cfg. Se omesso, viene caricato
un set standard di segnali. Di default, i nomi dei segnali caricati dal DDB, tramite la
GAM, sono:
135
APP. B Implementazione in real-time
• GLOBALTIME: tempo in scondi;
• PULSE: numero di scarica;
Le opzioni che si possono impostare sono:
• Files: lista dei file per i dati di ingresso;
• ATMInputPackets: lista dei pacchetti di ingresso ATM da caricare;
• ATMOutputPackets: lista dei pacchetti di uscita ATM che devono essere
forniti dalle applicazioni;
• FileCFG: nome di un file da inserire.
Il file degli input ha la seguente struttura:
Si riporta parte del file “RTDNIO_Z.cfg”:
DLLName = LoadData
System = MDSPLUS
Signals = {
CZ01
= {
SZ02
= {
TPZ01 = {
PZ02
= {
...
IP1
= {
IP4TOT = {
IP4IMB = {
IPFX
= {
ISHA
= {
IFRFA = {
ID1
= {
ID2
= {
ID3
= {
ID4
= {
}
// Per c a r i c a r e i d a t i JPF d a l d a t a b a s e
Source
Source
Source
Source
=
=
=
=
"JPF/PF/SC−CZ01<KS"
"JPF/PF/SC−SZ02<KS"
"JPF/PF/SC−TPZ01<KS"
"JPF/PF/SC−PZ02<KS"
}
}
}
}
Source
Source
Source
Source
Source
Source
Source
Source
Source
Source
=
=
=
=
=
=
=
=
=
=
"JPF/PF/SC−IP1<MS"
"JPF/PF/SC−IP4<MS"
"JPF/PF/SC−IIM<MS"
"JPF/PF/SC−IFX<MS"
"JPF/PF/SC−ISH<MS"
"JPF/PF/SC−IFRFA<MS"
"JPF/PF/SC−ID1<KS"
"JPF/PF/SC−ID2<KS"
"JPF/PF/SC−ID3<KS"
"JPF/PF/SC−ID4<KS"
}
}
}
}
}
}
}
}
}
}
136
APP. B Implementazione in real-time
OutputApplicationGAM
Questa GAM copia una lista di segnali in un file. I nomi dei segnali sono elencati
nella prima riga del file.
OutputApplicationGAM deve essere inclusa nell’applicazione come ultima GAM, altrimenti potrebbe verificarsi un errore se il segnale richiesto non è stato ancora inserito
nel DDB. Le opzioni che si possono impostare sono:
• Signals: lista dei nomi dei segnali da inserire nel DDB;
• NoNames: se vale a 0 o è omesso, i nomi di Signals vengono rimossi dall’output;
• FileName: nome del file di uscita (default= output.txt);
• AddPulseNumber: aggiunge l’estensione .pulseNumber al nome del file.
Si riporta un esempio del file “Out.cfg”:
DLLName = OutputApplicationGAM
Signals = {
GLOBALTIME
gasBoxXpointRadius , gasBoxXpointHeight
r a d i a l I n n e r G a p , radialOuterGap
topGap2 , topGap3 , topGap4 , gap6 , gap18
StrikeLeftR , StrikeLeftZ
boundaryPathRInner , boundaryPathZInner
boundaryPathROuter , boundaryPathZOuter
boundaryPathRTop , boundaryPathRBottom
pl a s m a C on f ig u r at i on Type
limiterFlux
boundaryFlux
IPTOTFIL
}
NoNames = 1
FileName = Modello_Filamentare
AddPulseNumber = PULSE
I segnali elencati nella lista “Signals” sono salvati nel file Modello_Filamentare.PULSE.txt.
137
Bibliografia
[1] A. Pironti, M. Walker, “Control of Tokamak Plasmas Part I-II”, IEEE Control
Systems Magazine, October 2005 and April 2006.
[2] “Efda-JET website”, http : //www.jet.ef da.org.
[3] A. Murari e altri, “Development of real-time diagnostics and feedback algorithms
for JET in view of the next step”, Plasma Physics and Controlled Fusion 47, 2005.
[4] F. Sartori, G. De Tommasi, F. Piccolo, “Plasma Position and Shape Control in
the world’s largest tokamak”, IEEE Control Systems Magazine, vol. 26, n◦ 2, pag.
64-78, April 2006.
[5] F. Piccolo, F. Sartori, L. Zabeo e altri, “Upgrade of the power deposition and
thermal models for the first wall protection of JET with an ITER-like Be combination of wall materials”, Fusion Engineering and Design, vol. 82, pag. 1094-1101,
October 2007.
[6] O Barana e altri, “Real-time determination of internal inductance and magnetic
axis radial position in JET”, Plasma Physics and Controlled Fusion 44, 2002.
[7] G. N. Deshko, T. G. Kilovataya, Y. K. Kuznetsov, V. N. Pyatov,I. V. Yasin, “Determination of the plasma column shape in a tokamak from magnetic
measurements”, Nuclear Fusion 23, pag.1309-1317, 1983.
138
BIBLIOGRAFIA
[8] R. Albanese, “Evoluzione temporale di un plasma confinato magneticamente”, Tesi
di Dottorato di Ricerca, Università degli Studi di Napoli, 1986.
[9] I.H. Hutchinson, “Principles of Plasma Diagnostics”, Cambridge University Press,
second edition 2001.
[10] J. Wesson, “Tokamak-third edition”, Oxford Science Publications, pag. 501, 2004.
[11] J.P. Freidberg, “Ideal Magnetohydrodynamics”, Plenum Press, New York, 1987.
[12] J. Wesson The Science of JET, March 2000.
[13] A. Beghi, A. Cenedese, “Advances in Real-Time Plasma Boundary Reconstruction”, IEEE Control Systems Magazine, October 2005.
[14] D.P. O’Brien, J. J. Ellis, J. Lingertat, “Local expansion method for fast plasma
boundary identification in JET”, Nuclear Fusion 33, n◦ 3, 1993.
[15] P. Mazzoldi, M. Nigro, C. Voci, “Fisica, Elettromagnetismo-Onde”, Edises,
Napoli, vol. II, 1995.
[16] “Metodo di Newton-Raphson”, http : //it.wikipedia.org/wiki/M etodo_delle_tangenti.
[17] A. J. Wootton, “Nuclear Fusion 19”, pag.987, 1979.
[18] D. W. Swain - G. H. Neilson, “Nuclear Fusion 22”, pag.1015, 1982.
[19] L. L. Lao e altri, “Nuclear Fusion 25”, pag.1611.
[20] G. Franceschetti, “Campi elettromagnetici”, Boringhieri, 1983.
[21] P. M. Morse, H. Feshbach, “Methods of Theoretical Physics”, McGraw-Hill Book
Company,Inc., New York, part I, pag. 791, 1953.
139
BIBLIOGRAFIA
[22] M. Abramowitz, I. A. Stegun, “Handbook of mathematical functions”, Dover
Publications, Inc., New York, 1965.
[23] S. M. Tan, C. Fox, “PHYSICS 707 Inverse Problems”, The University of
Auckland, http : //www.math.auckland.ac.nz/ phy707.
[24] P. C. Hansen, “Rank-Deficient and Discrete Ill-Posed Problems: Numerical
Aspects of Linear Inversion”, Technical University of Denmark, Lyngby, 1998.
[25] D. P. Bertsekas, “Constrained Optimization and Lagrange Multiplier Methods”,
Academic Press, New York, 1982.
[26] F. Sartori, “Magnetic measurements and their real-time applications in JET
Tokamak”, Tesi di Dottorato di Ricerca, Università degli Studi di Napoli, 2004.
[27] L. E. Zakharov, V. D. Shafranov, “Equilibrium of a toroidal plasma with non
circular cross section”, Sov. Phys. Tech, vol. 18, pag.151-156, 1973.
[28] B. Ph. van Milligen, “Exact relations between multipole moments of the flux and
moments of the toroidal current density in tokamaks”, Nuclear Fusion 30, 1990.
[29] “Mdsplus”, http : //www.mdsplus.org/index.php/Introduction.
[30] G. Calabrò e altri, “JET Plasma equilibrium reconstructions using magnetic and
MSE measurements and including the effects of the iron core”, Presented at 29th
EPS Conference, Montreux, June 2002.
[31] L. Zabeo, e altri “A new approach to the solution of the vacuum magnetic problem
in fusion machines”, Fusion Engineering and Design, vol. 82, pag. 1081-1088,
October 2007.
140
Elenco delle figure
1.1
Utilizzo delle risorse energetiche. . . . . . . . . . . . . . . . . . . . . .
7
1.2
Reazione Deuterio-Trizio. . . . . . . . . . . . . . . . . . . . . . . . . .
12
1.3
Configurazione di un Tokamak. . . . . . . . . . . . . . . . . . . . . .
16
1.4
Traiettorie del confinamento magnetico . . . . . . . . . . . . . . . . .
17
1.5
Riscaldamento del plasma. . . . . . . . . . . . . . . . . . . . . . . . .
18
1.6
Limiter and X-Point. . . . . . . . . . . . . . . . . . . . . . . . . . . .
20
1.7
Struttura di un divertore. . . . . . . . . . . . . . . . . . . . . . . . .
21
1.8
EFIT n◦ 49165. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
22
1.9
Mappa di Flusso n◦ 61153. . . . . . . . . . . . . . . . . . . . . . . . .
22
1.10 Vista generale del JET Tokamak e struttura di supporto in ferro. . .
23
1.11 Vessel del JET. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
24
2.1
Bobine del campo poloidale. . . . . . . . . . . . . . . . . . . . . . . .
28
2.2
Schematizzazione dei 10 circuiti di campo poloidale.
. . . . . . . . .
31
2.3
Gaps per il controllo di forma. . . . . . . . . . . . . . . . . . . . . . .
32
2.4
Schema di controllo SC. . . . . . . . . . . . . . . . . . . . . . . . . .
33
2.5
Schema dalle misure ai parametri geometrici. . . . . . . . . . . . . . .
36
2.6
Bobina di misura. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
37
2.7
Sonda ad effetto Hall. . . . . . . . . . . . . . . . . . . . . . . . . . . .
38
2.8
Sonda Rogowski. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
39
141
ELENCO DELLE FIGURE
2.9
Utizzo della bobina Rogowski nel tokamak. . . . . . . . . . . . . . . .
39
2.10 Sensori Magnetici al JET . . . . . . . . . . . . . . . . . . . . . . . . .
40
3.1
Superfici magnetiche toroidali annidate. . . . . . . . . . . . . . . . . .
44
3.2
Flusso in direzione poloidale. . . . . . . . . . . . . . . . . . . . . . . .
45
4.1
Regioni XLOC. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
50
4.2
Schema dalle misure al flusso. . . . . . . . . . . . . . . . . . . . . . .
59
4.3
Polinomi dei momenti di corrente. . . . . . . . . . . . . . . . . . . . .
71
4.4
Schema a blocchi del modello di plasma, ferro e coils poloidali. . . . .
72
4.5
Sensori magnetici. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
74
4.6
Circuit2Virtual. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
74
4.7
Filamenti dei circuiti. . . . . . . . . . . . . . . . . . . . . . . . . . . .
75
4.8
Filamenti di plasma. . . . . . . . . . . . . . . . . . . . . . . . . . . .
78
4.9
Valori singolari della Iron to Virtual. . . . . . . . . . . . . . . . . . .
81
5.1
Flusso per 9 filamenti. . . . . . . . . . . . . . . . . . . . . . . . . . .
88
5.2
Confronto flusso tra 9 e 1 filamento. . . . . . . . . . . . . . . . . . . .
88
5.3
Flusso delle sole correnti PF. . . . . . . . . . . . . . . . . . . . . . . .
90
5.4
Flusso correnti PF, Ferro e Plasma. . . . . . . . . . . . . . . . . . . .
90
5.5
Boundary di XLOC e Modello Filamentare in limiter e X-Point. . . .
92
5.6
Mappa di Flusso per n◦ 53045 in t = 45 e t = 65 sec. . . . . . . . . .
93
5.7
Mappa di Flusso tra XLOC e Modello Filamentare. . . . . . . . . . .
94
5.8
Corrente di plasma dell’impulso n◦ 53045 . . . . . . . . . . . . . . . .
96
5.9
ROG e TOG dell’impulso n◦ 53045 in LIMITER. . . . . . . . . . . .
96
5.10 RIG dell’impulso n◦ 53848 . . . . . . . . . . . . . . . . . . . . . . . .
98
5.11 Boundary dell’impulso n◦ 53848 . . . . . . . . . . . . . . . . . . . . .
99
142
ELENCO DELLE FIGURE
5.12 X-Point dell’impulso n◦ 53045 . . . . . . . . . . . . . . . . . . . . . .
100
5.13 RIG, ROG e TOG dell’impulso n◦ 53045 in X-POINT. . . . . . . . .
101
5.14 Valore di flusso al boundary per l’impulso n◦ 53045. . . . . . . . . . .
101
5.15 Andamenti dei gaps n◦ 6 e n◦ 18, dello Strike-Point sinistro e destro. .
102
6.1
XLOC e M. Filamentare in t = 40.13 sec. . . . . . . . . . . . . . . . .
104
6.2
Schema a blocchi per la fase di start-up. . . . . . . . . . . . . . . . .
108
6.3
Ricostruzione di flusso senza il ferro. . . . . . . . . . . . . . . . . . .
110
6.4
Confronto tra P.O.D. e CREATE con 4 filamenti e 3 momenti. . . . .
112
6.5
Confronto tra P.O.D. e CREATE con 8 filamenti e 7 momenti. . . . .
113
6.6
Confronto tra P.O.D. e CREATE per t ∈ [40.15, 40.25] sec. . . . . . .
114
6.7
Boundary di EFIT e m. filamentare ridotto per t ∈ [40.06, 43.06] sec.
115
B.1 Struttura ad albero di un MCF. . . . . . . . . . . . . . . . . . . . . .
125
B.2 Circuito di Shape. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
126
B.3 Felix-RT. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
130
B.4 Felix-OPT.
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
132
B.5 Algoritmi di creazione del modello. . . . . . . . . . . . . . . . . . . .
133
143