Dinamica: lo studio delle cause del moto
Un sistema e’ composto dal “corpo” e dall’ambiente” circostante che ne governa il moto.
Si puo’ esprimere un generico problema di meccanica nei termini seguenti:
• Dato il corpo
(cioe’ specificate le caratteristiche del corpo)
• Dato l’ambiente (
“
“
dell’ambiente)
Si deduca il moto che ne consegue
Per risolverlo, e’ necessario anzitutto:
a) definire l’influenza dell’ambiente sul corpo in modo “operativo” (quantitativo,
misurabile) ----> definire forza, massa etc.
b) definire le “leggi delle forze”.
Per quanto riguarda la meccanica classica, la prima parte e’ stata compiuta da Newton che
porto’ a maturazione le idee di Galileo, di Kepler, e di altri.
1
Le leggi di Newton:
La prima legge di Newton: “Ogni corpo persiste nel proprio stato di quiete, o di
moto rettilineo uniforme finche forze esterne ad esso applicate non lo costringono
a mutare questo stato” (anche detto “il Principio d’inerzia”)
La seconda legge di Newton: “Il cambiamento di moto e’ proporzionale alla forza
motrice ed avviene lungo la linea retta corrispondente alla forza impressa:
F = ma
La terza legge di Newton; “Ad ogni azione corrisponde una reazione uguale e
contraria.
Primo corollario: “un corpo spinto da forze congiunte descrive la diagonale di un
parallelogramma nel tempo in cui descriverebbe separatamente i lati.
2
Esame delle leggi
Prima legge di Newton
1. Verifica sperimentale
Nel limite di superfici perfettamente lisce,
un corpo che vi scivola sopra,
non s’arresta che per l’intervento
di una forza rallentatrice.
2. Un altra verifica sperimentale:
Un corpo, libero di muoversi su una
superficie che si muove con moto uniforme
rimane a quiete rispetto alla superficie
in assenza di forze applicate esternamente
ad esso
v
Si definisce un sistema di riferimento inerziale tale un sistema nel quale la prima legge di
Newton e’ valida. La prima legge afferma che non vi e’ differenza sostanziale tra tali sistemi.
Afferma, inoltre, che l’influenza dell’ambiente in un sistema inerziale si manifesta come
accelerazione (rispetto a quel sistema) ed attribuisce un nome (forza) a questa influenza. Il
nostro concetto di forza e’ cosi’ legato all’accelerazione, ma e’ ancora troppo vago.
3
La seconda legge di Newton e’ una definizione operativa della forza e della massa. E’ facile
dimostrare sperimentalmente che, per delle masse costituite da uno specifico materiale
(potrebbero essere il kilogrammi campione) e delle forze di una specifica natura:
F1
F2
=
a1
a2
cioe' che
a∝F
(1)
Quindi, si verifica che questo vale per qualsiasi tipo di forza e, in base a queste
osservazione, si definisce l’unita’ di forza:
Un unita’ di forza (qualsiasi) applicata ad un chilogramma (campione) produce un
accelerazione di 1 m/s2.
L’unita di forza viene chiamata il Newton (N)
E’ altrettanto facile dimostrare che, per una qualsiasi forza,
a1
a2
=
m2
m1
cioe' che
a∝ 1
m
(2)
(a parita’ di forza applicata)
Da (1) e (2) segue che:
a∝F
m
(nelle unita’ fino ad ora definte: [F]=N, [m]= No di kg campione, [a]=m/s2)
A questo punto la nostra definizione e’ legata ad un corpo composto del materiale prescelto
ma e’ gia’ generalizzata a qualsiasi forza che produce la medesima accelerazione.
4
Per generalizzare ulteriormente, si verifica sperimentalmente che le osservazioni
fatte valgono per corpi composti di un materiale qualsiasi.
Si definisce allora la massa in termini generici:
m=F
a
Cioe’: “ Un kg. (di materiale qualsiasi) accellera ad 1m/s2 quando vi si applica la
forza di un Newton’”
Osservando che aˆ = Fˆ , e' naturale scrivere :
F = ma
Un altra forma si ottiene definendo la quantita ' di moto
p = mv
sfruttando la quale si puo' scrivere (per m costante)
dp
d
v
F=
=m
= ma
dt
dt
(
)
5
Unita’ di forza:
S.I. (M.K.S.)
c.g.s. (Gaussiano)
f.p.s.
1 Newton (N)
1 dine (dyn)
1 libbra (lb)
= 1 kg.m/s2
= 1 g.cm/s2
= 1lb x g (cost. grav.) ft/s2
= 32.174 lb.ft/s2
Peso quale misura di massa (Massa gravitazionale):
Dalla definizione inerziale di massa:
m = F /a
Ma dalla legge dell’accelerazione gravitazionale, a=g indipendentemente dal valore
della massa. Segue dunque che:
W1
W2
=
m1 g
m2 g
=
m1
m2
W
m
dove W rappresenta la forza gravitazionale o forza peso. Da questo deriva la bilancia.
E dalla bilancia deriva la definizione di massa con specifico riferimento al suo peso: m = W/g
Definita in questo modo, viene detta la massa gravitazionale. E’ solito confondere unita’ di peso
(forza) ed unita’ di massa definendo l’unita’di peso
1 kg (peso)=1kg(massa) . g = 9.8 N.
6
La terza legge di Newton: “Ad ogni azione corrisponde una reazione uguale e contraria”.
Si definisce:
“l’azione”
“la reazione”
la forza esercitata dall’agente sul corpo
la forza
“
“ corpo “ agente
La terza legge vale per qualsiasi tipo di forza. Si distingue, in particolare, tra:
a) Forze a contatto
F
R
!
!
F = !R
b) Forze a distanza
S
N
Magnete
R
F
ferro
F = −R
7
Conservazione della quantita’ di moto: e’ implicita nella terza legge, per corpi
Interagenti ed isolati dall’ambiente
F = mc ac = dpc dt
R = ma aa = dpa dt
Dove gli indici c ed a si riferiscono, rispettivamente all corpo ed all’agente.
Dalla terza legge di Newton:
R = −F
cioe'
dpa dt = − dpc dt
dpa dt + dpc dt = 0
d ( pa + pc ) dt = 0
segue che':
pa + pc = cos tan te
In assenza di forze esterne al sistema ( corpo + agente ), la qdm (quantita’ di moto)
del sistema e’ costante.
8
Il primo corollario: afferma che le forze sono dei vettori in quanto agiscono
indipendentemente, l’una dall’altra. Questa proprieta’ viene anche chiamata il
Principio di sovrapposizione.
Dalla loro definizione, si sa’ che le forze possiedono grandezza e direzione, es:
f1 = ma1
f 2 = ma2
Il primo corollario afferma che, quando agiscono congiuntamente (sullo stesso corpo), i loro
effetti sono indipendenti. Ne risulta che l’effetto congiunto ne e’ la somma vettoriale
a = a1 + a2
allora
ma = ma1 + ma2
F = f1 + f 2
f2
a2 a
a1
F
f1
Le forze sono dunque vettori
Avendo definito l’influenza dell’ambiente sul corpo in modo operativo, si passa ora alla seconda
parte del programma: la definizione delle forze. Per ora, ne identificheremo solo due.
9
Le nostra prima legge delle forze
La forza gravitazionale
F = mg
Dove m e’ la massa, e g e’ idealmente una costante.
In fatti, g varia in funzione di altezza h sopra la superficie ed anche in funzione di luogo
sulla superficie terrestre. Generalmente,per h<< raggio terrestre e’ possibile trascurare
queste variazioni ed utilizzare il valore medio di 9.8 m/s.
Applicazione delle leggi di Newton
Per ora, continueremo a trascurare le dimensioni spaziali del corpo ed a considerare il moto
di punti materiali ( anche se e’ solito rappresentarli con blocchi ).
In fatti, abbiamo gia’ studiato il moto dei proiettili, quale esempi di problemi di cinematica,
prendendo per data l’accelerazione gravitazionale g
10
Iniziamo con due esempi che vedono applicate sia la
Seconda che la terza legge di Newton
Es.: Una massa m riposa sul suolo. Si identifichino
le forze agenti sul sistema (massa+suolo).
La forza di gravita’
W = mg = −mgĵ
(agente sulla massa)
N
La forza trasmessa
N ʹ′ = − N ʹ′ĵ
(agente sul suolo)
N = Nĵ
m
ĵ
La forza di reazione
(agente sulla massa)
iˆ
W
La risultante di tutte le forze agenti sulla massa e’ data da:
F =W + N
E dalla seconda legge di Newton,
W + N = ma = 0
segue che :
− mgˆj + Nˆj = 0
N = mg
N ʹ′
N
W
diagramma di corpo
libero
11
Mentre dalla terza legge di Newton, si deduce che la forza trasmessa N ' al suolo
e’ data da:
N ʹ′ = − N = −mgˆj
NB! Le forze di azione e di reazione non possono
equilibrarsi tra di loro perche agiscono su corpi diversi
Es.: Supponiamo ora che il suolo si muova con accelerazione a
(un ascensore). Scegliendo il sistema di coordinate in modo che:
ˆ
a = aj
Si sa’ che le forze agenti sulla massa sono:
W = −mgˆj
(forza gravitazionale)
N = Nĵ
(forza di reazione)
Per trovare N si consideri la forza totale agente sulla massa:
F = N + W = ma
(seconda legge di Newton)
N = ma − W = m(a + g ) ˆj
N ' = − N = −m(a + g ) ˆj (terza legge di Newton)
N
a
m
ĵ
iˆ
y
N
W
W
N ʹ′
x
Diagramma di corpo
libero
12
Es.: Una massa m tratta da una fune instensibile e leggera, scorre su una superficie
perfettamente liscia.
N
Le forze agenti sulla massa sono:
Q
T
Nella direzione verticale:
m
W N ʹ′
W = −mgˆj (la forza peso)
N = Nˆj
(la forza di reazione)
W + N = 0 (perche non vi e’ moto verticale)
N = mg , N ' = − N = −mg
N
Nella direzione orizzontale:
T = maiˆ
(seconda legge)
W
(1)
T
Diagramma di corpo
Libero per m
Le forze agenti sulla fune sono F e Q , e supponendo la
fune inelastica,
F + Q = m' a
dove m' e' la massa della fune e, ponendola a zero, ,
Q = −F
(2)
Tenendo conto della terza legge (T = −Q ) e sostituendo
da (2) in (1) e si ottiene:
Fiˆ = maiˆ
a = F /m
F
Q
F
Diagramma di corpo
Libero per la fune
13
Metodo per risolvere problemi di meccanica:
1)
2)
3)
4)
5)
Identificare tutte le forze rilevanti
Identificare il corpo(i) al quale si riferisce il problema
Scegliere il sistema di riferimento
Riportare le forze sul diagamma di corpo libero
Applicare le leggi di Newton
14
Fino ad ora ci siamo limitati ad esempi risolvibili in una dimensione . Consideriamo
ora un esempio in due dimensioni
a
N
Es.: massa scivola su un piano inclinato
privo di attrito.
Forze agenti sulla massa:
m
W = −Wsenθ iˆ − W cosθ ˆj
= −mgsenθ iˆ − mg cosθ ˆj
N = N ˆj
La forza totale (risultante) e :
F = W + N = −mg ( senθ iˆ + cosθ ˆj ) + N ˆj
ĵ
iˆ
E applicando la seconda legge di Newton:
θ
W
θ
Diagramma di corpo libero
N
W
a
θ
− mg ( senθ iˆ + cosθ ˆj ) + N ˆj = ma iˆ
cioe’
− mgsenθ = ma
(per le componenti parallele al piano)
− mg cosθ + N = 0 (per le
"
normali al piano)
cioe'
a = − gsenθ
N = mg cosθ
15
Es. Dati m1 e m2 si calcoli l’accelerazione delle masse e la
tensione nella fune. (si supponga la fune inestensibile e
priva di massa, la puleggia priva d’attrito e priva di massa e
la superficie lisca)
a1 = aiˆ,
T1 = Ti ,
W1 = −m1 gˆj ,
N = Nˆj ,
a2 = −aˆj
T2 = Tˆj
W2 = −m2 gˆj
N
m1
T1
N'
W2
iˆ
(fune inestensibile)
ĵ
T2
m2
W2
Nˆ ' = N ' ˆj
Applicando la seconda legge di Newton (abbreviata d’ora in poi N2) a m1:
− m1 gˆj + Nˆj = 0 (per le componenti verticali)
da cui :
N = m1 g (come per il caso stazionario) e dalla terza legge (N3)
N ' = −N ( "
"
e per le componenti orizzontali :
Tiˆ = m1aiˆ
da cui
T = m1a
)
Diagramma di corpo libero per m1
N
T1
W1
(1)
16
e applicando la seconda legge di Newton a m2:
Tˆj − m2 gˆj = m2 a2 = − m2 aˆj
T = m2 (g − a )
(2)
Sostituend o da (1) in (2) :
m1a = m2 (g − a )
a (m1 + m2 ) = m2 g
a=
m2
g
(m1 + m2 )
(3)
Diagramma di corpo libero per m2
T2
W2
e sostituend o da (3) in (1);
T=
m1m2
g
(m1 + m2 )
17
Una particolare categoria (“statica”) di problemi riguarda corpi in equilibrio statico. Il
seguente e’ un esempio semplice di un problema di statica.
Datoci θ e m, si calcolino le tensioni nelle funi.
T1 = T1iˆ
T2 = −T2 senθiˆ + T2 cosθˆj
T3 = −T3 ˆj
W = −mgˆj
x
θ
θ
T2
Per il corpo m:
e scomponendo :
T3 ˆj − mgˆj = 0
T3 = mg
(1)
e per il punto di collegamento:
T1 + T2 + T3 = 0 ( forze in equilibrio)
T3
− T3
W
T1 − T2 senθ = 0 ( forze orizzontali )
(2)
T2 cosθ − T3 = 0 ( forze verticali)
(3)
Sostituendo da (1)
T2 = mg
cosθ
e da (2) e (4)
T1 = (mg / cosθ )senθ = mg tan θ
T1
m
e scomponendo :
T1iˆ − T2 senθiˆ + T2 cosθˆj − T3 ˆj = 0
Applicando N 2 :
− T3 + W = ma = 0
y
(4)
18
Dinamica del moto circolare uniforme.
Es.: Un corpo (massa m), vincolato da una fune inestensibile e priva di massa, ruota con
velocita’ uniforme su una superficie priva di attrito.
Sapendo che:
v2
2
a = −ω r = − rˆ
r
T = −Trˆ
Ed applicando la seconda legge di Newton:
v
m
a
r
T
T = ma
cioe'
− Trˆ = −m ω 2 r
si ottiene :
( )
T = mω 2 r = mv 2 / r la forza centripeta
19
Per risolvere problemi di rotazione piu’ complessi, e’ utile introdurre il concetto di
momento angolare del punto materiale ed il concetto di momento di forza.
Def: il momento angolare del punto materiale:
l = r × p = r × mv
(
φˆ
p
φˆ
e scomponendo;
= r × m vr rˆ + vφφˆ
= r × mvφφˆ = mrvφ ωˆ
)
F
ω̂
.
r̂
r
φ
ω
dove ωˆ e' il versore // velocita' angolare ( ⊥ al piano di rotazione).
E siccome vφ = rω
l = mr 2ωωˆ = mr 2ω
Def.: il momento della forza ( anche detto il “momento meccanico”)
τ = r ×F
Con queste definizioni, si dimostra che:
dl
τ =
dt
Il teorema del momento angolare
20
r̂
Dimostrazione:
l = r × p = r × mv
dl dr
dv
=
× mv + r × m
dt dt
dt
ma
dr
dv
=v e
=a
dt
dt
segue che,
dl
= r × ma
dt
e siccome (dalla seconda legge di Newton)
F = ma
si conclude che :
dl
= r ×F =τ
dt
(QED)
21
Si noti l’analogia con la seconda legge di Newton per il moto di traslazione:
dp
F=
dt
dl
τ=
(il “momento” della forza = la prima derivata del “momento” della q.d.m.)
dt
Il teorema del momento angolare e’ la seconda legge di Newton in forma idonea a
trattare problemi di rotazione. In particolare si noto che, se la forza e centrale:
F = Frˆ
allora
τ = r × F = r × Frˆ = 0
Segue allora, dal teorema del momento angolare, che
dl
=τ = 0
dt
Cioe’, l e’ costante
22
L’esempio piu’ banale di forza centrale e’ la tensione della fune inestensibile che
agisce da vincolo per il moto rotatorio (gia’ trattato in parte a pagina 19):
F = T = −Trˆ
Applicando il teorema del momento angolare
dl
τ = r × F = dt
e ricordando che la forza e’ centrale , cioe’ che:
r × F = r × (− Trˆ ) = 0
v
m
a
r
T
Si conclude
subito dal teorema del momento angolare che:
dl
=0
dt
l
Cioe’, che il momento angolare e’ costante, e ricordando che
l = r × mv = mrvωˆ = mr 2ωωˆ
segue che
dφ
= l0 (costante)
dt
Vale dire che, per r costante
v
l
dφ
= ω 0 = 0 = 0 2 (costante)
dt
r mr
Ovvero che v0 e’ costante per r (lughezza della fune) costante.
Il moto e’ dunque di rotazione uniforme
mr 2ω = mr 2
23
NB! Cosa succederebbe se r non fosse costante?
24
Esempio: Pendolo semplice
F = T +W
(fune inestensibile e leggera, m assimilabile a punto materile)
ˆ
l • θ
= −T rˆ + (W cosθ ) rˆ − (Wsenθ )θˆ
Applicando
il teorema del momento angolare:
dl
τ =
dt
dove
τ = r × F = r × − Trˆ + W cosθ rˆ − Wsenθ θˆ
= −r × Wsenθ θˆ
= − Lmgsenθ ωˆ
τ = −mgLsenθ ωˆ
[
r̂
ω
θ
L
]
T
m
θ
W
e
dθ
l = r × p = Lrˆ × mv = Lrˆ × mωLθˆ = mL2
ωˆ
dt
Si ottiene :
d 2θ
− mgLsenθ = mL
dt 2
d 2θ
= −(g L )senθ
2
dt
θˆ
2
25
Per angoli piccoli piccoli, sin θ ≈ θ
d 2θ
≈ −(g L )θ
2
dt
oppure,
d 2θ ⎛ g ⎞
+ ⎜ ⎟θ ≈ 0
dt 2 ⎝ L ⎠
Questa e’ un equazione differenziale omogenea di secondo ordine in θ (spostamento angolare),
la soluzione della quale e’:
θ = θ 0 sen(ω ' t + δ )
dove ω ' = g
e’ detta la “frequenza angolare” o “pulsazione”,
L
θ0 e δ sono costanti d’integrazione dette, rispettivamente, l’ampiezza e la costante di fase
e (ω’t + δ ) e’ detta la “fase”.
Il moto oscillatorio che corrispondente a questa soluzione e’ detto moto armonico semplice
(M.A.S.). Il periodo τ dell’oscillazione e’ dato da:
τ = 2π ω ' = 2π
L
g
e la frequenza ν da ν =
1
τ
=
1
2π
g
L
26
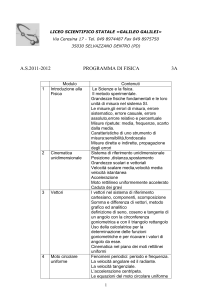
La costante di fase δ e l’ampiezza θ0 vengono determinata dalle condizioni iniziali
θ (t ) = θ 0 sen(ω ' t + δ )
θ0
Anche la velocita' e l' accelerazione angolare hanno
lo stesso andamento oscillatorio (MAS) .
ω (t ) =
−δ
dθ (t )
= θ 0ω ' cos(ω ' t + δ ) = ω0 cos(ω ' t + δ )
dt
= ω0 sen(ω ' t + δ + π / 2 )
ω0
θ (t )
π −δ
2π − δ
ω't
0
ω (t )
dω (t )
= −θ 0ω '2 sen(ω ' t + δ ) = −ω '2 θ (t )
dt
α 0 α (t )
= α 0 sen(ω ' t + δ + π )
Risolto il problema del moto angolare con l’applicazione
del teorema del momento angolare, per risalire alla
tensione, si applica la seconda legge di newton al moto
radiale:
Fr = !T + mg cos! = mar = !m" 2 L
e, per ! << 1,
α (t ) =
Series 1
T ! mg cos! = m" 2 L
T = mg cos! + m" 2 L
cioe'
2
T (t) = mg cos(! 0 sen(" 't + # )) + mL "#! 0" 'cos (" 't + # )$%
27
28
Una categoria di “ leggi” delle forze e’ quella relativa alle forze d’attrito. Distinguiamo
tra due tipi
a)Forze d’attrito radente
Si manifesta tra superfici non perfettamente lisce
Si distingue tra due tipi d’attrito radente:
a) attrito statico fs
b) attrito dinamico fk
Le leggi empiriche dell’attrito radente (da Vinci 1452-519):
sono le seguenti:
1) f s ≤ µ s N
Dove µs e’ detto il “coefficiente di attrito statico”.
La reazione complessiva della superficie scabra e’ dunque:
R = fs + N
cono di
attrito statico
e quando f s = µ s N allora
tan α = f s / N = µ s
2) f k = µ k N
dove µ k e' detto il " coefficiente di attrito dinamico"
tan α =
R N
α
fs
R α
fs
F
N
F
fk
= µk
N
29
3) generalmente, µ k < µ s
materiali
µs µk
Acciaio su ghiaccio
0.03
0.01
Pneumatico su strada (asciutta)
1.0
0.7
Pneumatico su strada (bagnata)
0.7
0.5
4) µ k e µ s Non dipendono dall’area della superficie di contatto ma solo dalla
reazione Normale N
5) µ k Non dipende generalmente dalla velocita’ ( finche
cm < v < m
s
s
6) µ k e µ s Dipendono dalla natura delle superfici
NB! µ k e µ s sono adimensionali
30
b) Attrito nei fluidi: (In assenza di turbolenza)
Vengono esercitate da fluidi viscosi su corpi in moto. Generalmente:
f = −bv
dove
f
v
b = kη
La costante η e’ la viscosita’ del fluido e la costante k dipende dalla forma del corpo.
Per una sfera di raggio r0 :
k = 6πr0
( " legge di Stokes" )
La velocita’ limite viene raggiunta quando:
F + f = ma = 0
F
f
cioe' quando
f = −F
kηvL = F
vL = F / kη
Per caduta libera: F = −mgˆj , vL = mg
b
= mg
kη
31
Unita:
dalla legge di Stokes: [k] = [m]
e siccome
[b] = N/(m/s)
[η] = [b]/[k] = (N/m2)s
In presenza di turbolenza: (quando
v supera qualche m/s nell’aria)
f ∝ v2
E per corpi che non s’allontanano troppo dallo sferico (“arrottondati”) nell’aria:
f = 0.5CρAv 2
dove C varia tra circa 0.4 e 1
A
dove A e’ l’area della sezione ⊥ direzione di moto e
C e’ una costante caratteristica del corpo ( il “coefficiente aerodinamico”) che varia tra circa
0.4 e 1, e ρ e’ la densita’ (massa/volume) dell’aria.
Segue che la velocita’ limite di caduta libera in queste circostanze e’ data da:
0.5CρAv L2 = mg
⇒
vL =
2mg
CρA
Si veda il testo per una tabella di velocita’ limite.
32
Si consideri ora un altra “legge” delle forze
La forza della molla elastica (legge di Hooke)
T = −kΔl
Δl
l
T•
F
Dove
Δl e' l' allungamento o estensione
k
e' la costante elastica della molla
F
(costante di Hooke)
Il segno negativo la caratterizza quale “forza di richiamo”
limite d’elasticita’
Δl
33
Es.: Moto di un punto materiale m che scorre su una superficie priva d’attrito,
soggetto alla forza di una molla elastica “leggera”.
Definendo il nostro sistema di riferimento a modo che x corrisponda all’estensione
della molla:
T
T = −kx
m
E applicando la seconda legge di Newton:
ma = − kx
x
d 2x
m 2 = − kx
dt
d 2x
k
=
−
x
2
dt
m
oppure, riordinando :
d 2x k
+ x=0
2
dt
m
Equazione differenziale di secondo grado (omogenea)
La soluzione di questa equazione e’ data:
x = Asen(ωt + δ ) “moto armonico semplice”
con
ω = km
, “costante di fase” δ ed “ampiezza” A
Il moto e’ un oscillazione sinusoidale con periodo τ =
2π
ω
=1
34
υ dove ν e’ la frequenza
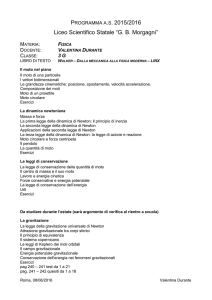
Anche la velocita' e l' accelerazione angolare hanno
lo stesso andamento oscillatorio (MAS) .
v(t ) =
dx (t )
= Aω cos(ωt + δ ) = v0 cos(ωt + δ )
dt
= v0 sen(ωt + δ + π / 2)
dv (t )
a(t ) =
= − Aω 2 sen(ωt + δ ) = −a0 sen(ωt + δ )
dt
= a0 sen(ωt + δ + π )
x (t )
A
−δ
π −δ
2π − δ
ωt
0
−A
v(t )
α0
a (t )
Series 1
35