Capitolo 1
Introduzione alla sia
La sia è quella sienza il ui intento è quello di determinare le leggi he governano
l'evolversi dei fenomeni naturali in tutto l'universo. Essa orrisponde al tentativo dell'essere umano di desrivere in maniera quantitativa la natura ed il mondo
he abbiamo attorno. La desrizione viene fatta per mezzo di relazioni tra oggetti utilizzando le strutture logihe date dalla matematia. Come srisse Galileo nel
Saggiatore:
La losoa è sritta in questo grandissimo libro he ontinuamente
i sta aperto innanzi a gli ohi (io dio l'universo), ma non si può intendere se prima non s'impara a intender la lingua, e onoser i aratteri,
ne' quali è sritto. Egli è sritto in lingua matematia, e i aratteri son
triangoli, erhi, ed altre gure geometrihe, senza i quali mezzi è impossibile a intenderne umanamente parola; senza questi è un aggirarsi
vanamente per un osuro laberinto.
(Galileo Galilei, Il Saggiatore, Cap. VI)
In eetti, il metodo di lavoro moderno del sio, e più in generale di uno sienziato, venne introdotto ome riterio di indagine della natura da Galileo Galilei (1564
- 1642). In osa onsiste dunque questo metodo di indagine, detto universalmente
metodo sperimentale? Possiamo shematizzarlo ome segue:
a) osservazione del fenomeno e individuazione del problema;
b) selta delle grandezze appropriate per la sua desrizione ed eseuzione di una
esperienza ontrollata;
) formulazione di ipotesi;
d) ideazione di un esperimento per saggiare le ipotesi;
1
1.1 Unità di misura: il Sistema Internazionale MKS
e) formulazione teoria della legge.
Avere dimistihezza on questa proedura, osì ben appliabile alla sia, permette di avere uno strumento di indagine valido non solo per la sia o le sienze in
generale, ma anhe per qualsiasi altra disiplina.
Siuramente il formalismo matematio rappresenta la più alta espressione di linguaggio he soddisfa le esigenze di una sienza a arattere preminentemente quantitativo quale è la sia. Tra la sia e la matematia esiste un rapporto di interdipendenza ben più stretto di quello he a prima vista potrebbe apparire. Per rendere più
hiaro questo onetto faiamo un esempio. Consideriamo la seguente espressione:
F = −kx
Ne abbiamo due interpretazioni, a seonda he la vediamo ome formula matematia
o ome legge sia, ome risulta dallo shema di seguito.
x:
Matematia
Fisia
F = −kx
F = -kx
variabile indipendente
k:
F:
ostante
∈ℜ
variabile dipendente
∈ℜ
x: allungamento della molla
k: ostante elastia della molla
∈ℜ
F: forza eseritata dalla molla
Dal punto di vista della sia, la matematia è uno strumento grazie al queale può
desrivere e prevedere fenomeni reali, per l'appunto partendo dalla realtà. Mentre
nel primo aso
F = −kx orrisponde ad una funzione matematia, on una variabile
dipendente e una indipendente, nel seondo aso l'espressione va letta ome la forza
eseritata dalla molla è direttamente proporzionale all'allungamento della molla
stessa, e il oeiente di proporzionalità k si denise
1.1
costante elastica della molla.
Unità di misura: il Sistema Internazionale MKS
Nel 1971 la Conferenza Generale dei pesi e delle Misure ha selezionato sette grandezze
osiddette grandezze fondamentali, he quindi ostituisono la base del Sistema
Internazionale di unità.
La misura di ogni grandezza viene eettuata rispetto ad una partiolare unità di
misura. Infatti non avrebbe senso dire he, ad esempio, il tavolo misura 1.2, mentre
questa espressione assume signiato nel momento in ui assoiamo a 1.2 una unità
di misura: il tavolo misura 1.2 m. Ma avremmo anhe potuto dire il tavolo misura
12 dm, o 1200 mm. In ogni aso, anhe se ambia il valore numerio, noi riusiamo
a apire esattamente quanto misura il tavolo perhè assoiamo valore e unità di
misura.
2
Introduzione alla sia
Grandezza
Unità di misura Simbolo
Lunghezza
metro
m
Tempo
seondo
s
Massa
kilogrammo
kg
ampere
A
kelvin
K
mole
mol
andela
d
Corrente elettria
Temperatura
Quantità di sostanza
Intensità luminosa
Tabella 1.1: Unità fondamentali nel Sistema Internazionale
Lunghezza, tempo e massa sono le tre grandezze fondamentali he utilizzeremo
nella prima parte del orso, dato he on esse si posso denire tutti i fenomeni
relativi alla meania.
Il onetto di lunghezza, o distanza spaziale, risulta abbastanza sontato. Deniamo invee tempo ome quella dimensione he i permette di ordinare in maniera
sequenziale eventi he avvengono in uno stesso luogo.
Con il termine massa di
un erto orpo identihiamo la quantità di materia di ui è ostituito quel orpo.
Spesso nel linguaggio omune si onfonde la massa on il peso, ma è bene hiarire sin
da subito he invee on il termine peso si intende l'entità della forza he agise su
un orpo massivo a ausa del fatto he esso si trova viino alla superie terrestre.
Quindi il peso è una grandezza diversa, ossia una forza e non una massa!
Vi sono altre grandezze he verranno spesso usate in questo orso, e he sono
utilizzate omunemente nella vita di tutti i giorni. Un esempio è la veloità.
La veloità è denita grandezza derivata perhè è ottenuta dal rapporto tra
lunghezza e tempo:
s
L
v= =
.
t
T
dove
L sta per lunghezza e T
sta per
tempo.
Le
grandezze derivate sono quin-
di quelle grandezze ottenute da relazioni matematihe tra le grandezze fondamentali. Esempi di grandezze derivate oltre alla veloità (m/s)sono anhe l'aelerazione
2
3
2
(m/s ), il volume (m ), la forza (Kg m/s ).
Il valore di una grandezza sia può assumere valori molto grandi (si pensi alle
distanze tra orpi elesti) o distanze molto piole (dimensioni atomihe) rispetto
alla sala umana. Per questo motivo è importante introdurre multipli e sottomultipli
delle unità di misura seondo potenze di 10.
Quando si ha a he fare on grandezze derivate diventa molto importante saper
analisi dimensionale,
fare un'
he onsiste nella veria delle dimensioni di due
espressioni he vengono onfrontate tra di loro. Ad esempio:
3
1.2 Conversione delle unità di misura
Presso Simbolo Valore
exa
peta
tera
giga
mega
kilo
etto
dea
dei
enti
milli
miro
nano
pio
femto
atto
E
P
T
G
M
K
dea
da
d
m
µ
n
p
f
a
Tabella 1.2:
1018
1015
1012
109
106
103
102
101
10−1
10−2
10−3
10−6
10−9
10−12
10−15
10−18
Pressi metrii
1
s = at2 .
2
Faiamo l'analisi dimensionale:
1 L
1 2 1 L
2
T =
6 T 2 = [L].
s = at =
2
2 T2
2 6 T2
infatti s è il simbolo per indiare uno spazio, ioè una lunghezza. Da notare he
quando si fa l'analisi dimensionale la simbologia utilizzata è quella delle parentesi
quadrate. Da notare inoltre he esistono numeri he non hanno dimensione, ome
ad esempio 1/2 nell'espressione preedente. Generiamente sono numeri puri gli
argomenti di esponenziali, seni, oseni, logaritmi, e.
1.2
Conversione delle unità di misura
Di seguito aluni esempi per dimostrare ome si svolge la onversione tra unità di
misura dierenti.
4
Introduzione alla sia
1.
A quanti seondi orrispondono 2 ore e 7 minuti?
Ogni ora è ostituita da 60 minuti, e ogni minuto da 60 seondi. Quindi in
totale in ogni ora vi sono:
1h = 60min = 60 × 60s = 3600s
2h7min = 2 × 3600s + 7 × 60s = 7200s + 420s = 7620s
2.
A quanti veloità in m/s sta andando un'automobile il ui tahimetro segna 45
Km/h?
v = 45
Km
1000m
m
= 45 ×
= 12, 5
h
3600s
s
Eserizi onsigliati
1. Dimostra he l'espressione
x = x0 + v 0 t +
1 2
at
2
è dimensionalmente onsistente. La quantità x e x0 sono distanze, v0 è una
veloità, a è un'aelerazione e t è il tempo.
2. Un magazzino è lungo 20 Yard, largo 10 Yard e alto 15 piedi. Quant'è il suo
volume? (si riordi he 1 Yard = 0.9144 metri, e 1 piede = 30,48 m)
3. Il sangue nell'aorta dell'uomo può avere una veloità di 35 m/s. Quanto vale
questa veloità in m/h?
4. Esprimi in mm e km la lunghezza di un tipio batterio E. Coli lungo in media
5 mirometri.
1.3
Vettori e salari
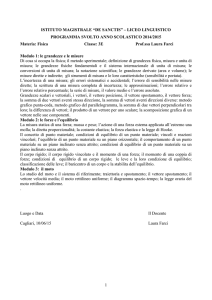
In sia possiamo suddividere tutte le grandezze in due grandi insiemi: vettori o
salari. I vettori sono rappresentati graamente da una freia e quelle grandezze
he sono aratterizzate da:
, o intensità, o ampiezza, he orrisponde al valore numerio unito
all'unità di misura, he graamente orrisponde alla lunghezza della freia;
modulo
direzione
, ioè la retta sulla quale appoggia il vettore;
5
1.3 Vettori e salari
Figura 1.1: Rappresentazione di un vettore.
verso, ioè l'orientamento del vettore, identiato dalla punta della freia.
Nella srittura, quando si svolgono aloli on i vettori, essi vengono rappresentati on il simbolo della grandezza e una freetta sopra la lettera (~v ) oppure
sempliemente on la lettera in grassetto (v). Esempio di grandezze vettoriali sono
lo spostamento, la veloità, l'aelerazione, le forze, il ampo elettrio, il ampo
magnetio.
L'altra tipologia è quella degli salari, ioè quelle grandezze per la ui denizione
è suiente la onosenza del modulo, e l'unità di misura. Esempi di grandezze
salari sono la massa, il tempo, l'energia.
1.3.1
Componenti di un vettore
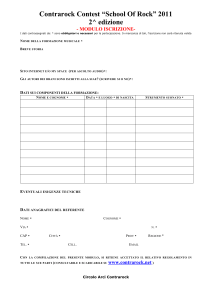
Figura 1.2:
Un vettore
~a
nel sistema di riferimento
rispettivamente rispetto all'asse
x
e all'asse
xy ,
on le omponenti
ax e ay ,
y.
Consideriamo il vettore ~a giaente sul piano xy , he prendiamo ome nostro
sistema di riferimento. Il vettore ~a ha due omponenti, una he si proietta lungo
6
Introduzione alla sia
l'asse x e l'altra lungo l'asse y , ome si può vedere in gura 1.2(a) e 1.2(b). Questa
proedura di riera delle due omponenti di un vettore si hiama somposizione
di un vettore nelle sue omponenti. Le omponenti a~x e a~y sono a loro volta
vettori, he hanno ome modulo la proiezione di ~a rispettivamente sugli assi x e y ,
ome direzione la direzione degli assi artesiani e ome verso quello positivo degli
assi. Grazie alla trigonometria (vedi sezione 1.4) possiamo alolare sempre on
preisione il valore delle omponenti di un vettore.
Si può srivere un vettore ome somma delle sue omponenti attraverso la rappresentazione artesiana:
~a = ax î + ay ĵ
dove ax e ay sono le omponenti artesiane (omponenti sugli assi x e y), mentre
î e ĵ sono versori on direzione e verso degli assi x e y . I versori sono partiolari
vettori, he hanno modulo 1. Servono per denire la direzione e verso.
Quindi sfruttando il prodotto per lo salare si può srivere un vettore ome
prodotto di uno salare (ioè un numero he orrisponde al modulo del vettore) per
un versore (he ne denisa direzione e verso). Ad esempio, si può srivere il vettore
~r di modulo 5 e direzione quella dell'asse y ome ~r = 5~j . Quindi se ax = 4 e ay = 8
il vettore ~a nella rappresentazione artesiana appare ome
~a = 4î + 8ĵ
Si noti he tutta la trattazione preedente vale nel aso di vettori nello spazio,
ioè on tre omponenti î (asse x), ĵ (asse y), k̂ (asse z).
1.3.2
Operazioni on i vettori
Somma e dierenza di vettori
La somma di due vettori ~u e ~v è denita ome il vettore ~u + ~v , diagonale del parallelogramma formato dai vettori ~u e ~v . Il vettore risultante ~u + ~v appartiene allo
stesso piano di ~u e ~v (regola del parallelogramma). La somma di vettori può avvenire
tramite la somma di omponenti, ome mostrato nell'esempio ??. La denizione di
~ permette di denire la dierenza tra due vettori
opposto di un vettore (~u → −u
u − v ome somma di u on l'opposto di v .
Prodotto per uno salare
La moltipliazione di un vettore ~u per uno salare c è denito ome un nuovo vettore
c~u he ha ome modulo cu e ome direzione e verso quelli di ~u.
7
1.3 Vettori e salari
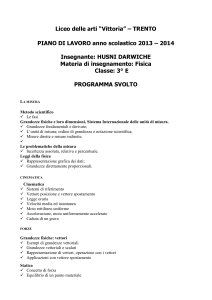
Figura 1.4: Prodotto vettoriale.
Figura 1.3: Prodotto salare.
Prodotto salare
Il prodotto salare tra due vettori ~u e ~v è uno salare, denito osì:
~u · ~v = uv cos θ
dove θ è l'angolo formato dai due vettori, ome in gura 1.3.
Il prodotto salare gode della proprietà ommutativa
~u · ~v = ~v · ~u.
Il prodotto salare è nullo se almeno uno dei due vettori è il vettore nullo, oppure
se essi sono tra loro perpendiolari, dato he il cos90◦ è zero.
Prodotto vettoriale
Si die prodotto vettoriale dei vettori v e u il vettore libero w avente:
la direzione della retta perpendiolare al piano individuato da v e u
il verso ottenuto dalla regola della mano destra: disponendo pollie, indie e
medio perpendiolari tra loro, se il pollie india la direzione di v e l'indie la
direzione di u, allora il medio india la direzione di w. In maniera equivalente
si può aermare he il verso di w è tale he la terna (v, u, w) sia una terna
sinistrorsa.
il modulo di w è denito dalla formula:
|~v × ~u| = vu sin θ.
Per hiarezza si veda la gura 1.4.
8
Introduzione alla sia
1.4
Ripasso di trigonometria
Si onsideri una superie piana. Si denise angolo piano iasuna delle due parti
di piano delimitate da due semirette usenti da uno stesso punto appartenente alla
superie.
r
A
O
B
s
I due angoli piani deniti
dalle semirette r e s.
Rappresentazione di
un'angolo he misura 1 radiante. Si noti
he raggio e aro hanno la stessa misura.
Figura 1.5:
Figura
1.6:
Gli angoli si misurano in gradi o in radianti. Si denise grado l'ampiezza di un
angolo he sottende un aro di ironferenza pari ad 1/360 della lunghezza totale
della ironferenza stessa.
Si die misura in radianti il rapporto tra la lunghezza di un aro di ironferenza
sotteso dall'angolo e il raggio della ironferenza stessa. Se hiamiamo α l'angolo da
misurare, L la lunghezza dell'aro orrispondente e R il raggio allora vale
α=
L
R
In altre parole si può dire he il radiante è esattamente l'angolo he sta sotto
ad un'aro la ui lunghezza è pari a quella del raggio. Nella ironferenza gli angoli
vanno da 0 a 2π radianti: ad esempio, l'angolo piatto (180◦ ) orrisponde a π radianti,
l'angolo giro a 2π radianti, l'angolo retto a π/2 radianti. Per gli altri angoli si veda
la tabella 1.3.
Per passare da gradi a radianti (o vieversa) si utilizza una semplie proporzione
he si basa sul fatto he è noto il valore dell'angolo giro sia in gradi he in radianti.
αrad : 2π = αgradi : 360◦ .
1.4.1
Funzioni trigonometrihe
Le funzioni nelle quali la variabile indipendente è un angolo (detto β ) vengono dette
trigonometrihe.
9
1.4 Ripasso di trigonometria
f = f (β)
Per denire le funzioni goniometrihe elementari si onsideri sso il lato di origine
degli angoli (identiato, nel aso del riferimento artesiano ortogonale xOy, ol
semiasse positivo delle asisse) e variabile il seondo.
Si onsideri oral'angolo orientato β il ui primo lato oinide appunto ol semiasse
positivo delle asisse e il seondo è la semiretta r. Sia P un generio punto della
semiretta r,siano xP e yP le sue oordinate e sia OP la distanza assoluta di P
dall'origine O.
Possiamo osì denire
Seno di β : sin β =
yP
OP
Coseno di β : cos β =
xP
OP
Tangente di β : tan β =
yP
xP
Cotangente di β : cot β =
xP
yP
Come si può failmente veriare, tra queste quattro funzioni interorrono le
seguenti relazioni:
tan β =
sin β
cos β
Figura 1.7:
cot β =
cos β
sin β
tan β =
1
cot β
cot β =
1
tan β
Denizione di seno e oseno dato un erto angolo β .
10
Introduzione alla sia
Figura 1.8: Seno, oseno e tangente sulla ironferenza goniometria unitaria.
1.4.2
Cironferenza goniometria
Si hiama ironferenza goniometria una ironferenza orientata alla quale è assoiato un sistema di riferimento artesiano ortogonale (xOy ), la ui origine oinide
on il entro della ironferenza stessa.
La ironferenza goniometria è unitaria (vedi gura 1.8) quando il raggio è
unitario, ioè misura 1. Ma se il raggio è 1 allora dalle formule preedenti signia
he OP = 1, e quindi il seno orrisponde all'ordinata di P mentre il oseno ne è
l'asissa. Il verso positivo degli angoli, e degli arhi, nella ironferenza goniometria
è quello antiorario.
1.4.3
Relazione fondamentale della goniometria
Considerando in gura 1.8 il triangolo rettangolo ODC, si nota he l'ipotenusa orrisponde esattamente al raggio (he vale 1) e i lati DC e OC valono rispettivamente
sin x e cos x. Valendo per ogni triangolo rettangolo il teorema di Pitagora:
OD2 = OC 2 + CD2
per ui sostituendo i valori relativi alla ironferenza gon. unitaria:
1 = cos2 x + sin2 x,
detta relazione fondamentale della goniometria, he vale per qualsiasi x, ioè per
qualsiasi angolo.
11
1.4 Ripasso di trigonometria
1.4.4
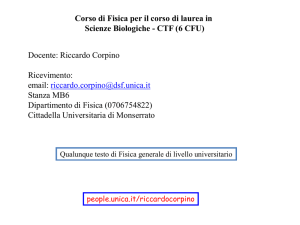
Relazioni tra lati e angoli
La relazione fondamentale fra i lati di un triangolo rettangolo è stabilita dal teorema
di Pitagora, he si usa per alolare la misura di un ateto quando sono note le misure
degli altri due lati. Con i metodi della trigonometria è anhe possibile determinare
la misura di un ateto onosendo la misura di uno solo degli altri lati insieme
all'ampiezza di uno degli angoli auti del triangolo rettangolo.
Nelle formule riportate indiheremo on i l'ipotenusa, e on c1 e c2 i due ateti
di un generio triangolo rettangolo. Gli angoli opposti ai ateti c1 e c2 saranno
rispettivamente γ1 e γ2 , ome visibile in gura 1.9.
La misura di un ateto equivale a quella dell'ipotenusa moltipliata per il seno
dell'angolo opposto, o per il oseno dell'angolo adiaente:
c1 = i sin γ1 = i cos γ2
c2 = i sin γ2 = i cos γ1 .
Un'altro metodo per la misura di un ateto è quello di moltipliare l'altro ateto per la tangente dell'angolo opposto al primo, o per la otangente dell'angolo
adiaente:
c1 = c2 tan γ1 = c2 cot γ2
c2 = c1 tan γ2 = c1 cot γ1 .
Figura 1.9: Angoli e lati in un triangolo rettangolo.
12
Introduzione alla sia
Angolo α Angolo α sin α cos α tan α
(gradi)
(rad)
0◦
30◦
45◦
60◦
90◦
180◦
270◦
360◦
0
0
π
6
π
4
π
3
π
2
1
√2
2
√2
3
2
1
0
−1
0
π
3
π
2
2π
1
√
3
√2
2
2
1
2
0
−1
0
1
0
√
3
3
1
√
3
-
0
-
0
Tabella 1.3: Prinipali valori delle funzioni trigonometrihe per aluni angoli notevoli.
13